第四章 中低速磁浮列车的牵引控制系统解读
中低速磁悬浮牵引供电系统分析与研究[权威精品]
![中低速磁悬浮牵引供电系统分析与研究[权威精品]](https://img.taocdn.com/s3/m/c98d5fc677eeaeaad1f34693daef5ef7ba0d12d4.png)
中低速磁悬浮牵引供电系统分析与研究-权威精品本文档格式为WORD,感谢你的阅读。
最新最全的学术论文期刊文献年终总结年终报告工作总结个人总结述职报告实习报告单位总结摘要:文章对中低速磁悬浮牵引供电系统、辅助电源系统及控制系统的特性、组成及工作原理进行分析与研究,并介绍了供电系统主要电气设备及其用途,阐述了牵引供电系统在保证中低速磁悬浮列车中的安全、高效和稳定性方面的作用和意义,以及中低速磁悬浮列车在未来的城市轨道交通中所起的重要作用和意义。
关键词:中低速磁悬浮;牵引供电系统;控制系统0引言中低速磁悬浮列车相对现有的轨道列车,更具有平稳舒适、安全、节能、环保、转弯半径小、爬坡能力强、运用维护费用低等优点,适用于城市内部、近距离城市和旅游景区的一种新型交通运输工具,也越来越受到人们广泛的关注。
其悬浮、牵引导向和车辆结构及供电技术是实现磁悬浮列车安全可靠运行的重要保证和前提。
磁悬浮列车是通过电磁力完成悬浮和导向功能,其牵引力由线性电机产生。
高速磁悬浮列车采用同步长定子直线电机驱动的常导磁吸式或磁斥式系统,同步电机定子三相绕组铺设在地面线路两侧,由地面一次控制的线性同步电机进行驱动和导向,无需通过弓网受电方式供电。
而中低速磁悬浮列车采用异步短定子直线电机驱动的常导磁吸式系统,线性感应电机的定子绕组安装在列车上,转子铺设在线路上,通过供电轨和车载受流装置为车辆供电。
本文将重点对中低速磁悬浮供电系统进行分析与研究。
1牵引供电系统1.1牵引供电方式中低速磁浮列车的速度一般为100~200km/h,适用于城市公共轨道交通,包括市内交通、市郊交通、市中区至机场、中心城市至卫星城市以及区域性城市群交通。
城市轨道交通的特点决定了中低速磁悬浮列车的牵引供电须采用直流电流制,接触网为正极,钢轨为负极,机车从相邻两变电所取电,即采用双边供电方式。
其电压等级选用国家推荐的DC750V或DC1500V,变电所采用交直流牵引变电所,牵引供电方式与目前广泛使用的地铁和轻轨基本相同。
磁悬浮列车牵引系统的设计及控制
磁悬浮列车牵引系统的设计及控制设计1:磁悬浮列车的工作原理在磁悬浮列车的牵引系统中,磁悬浮列车运行的主要原理是磁浮作用。
当磁悬浮列车向前移动时,它会在磁轨上面生成一个磁场,使得其与轨道之间形成一个磁悬浮的效果。
此外,由于磁场的反向性,这个效果可以使列车在轨道上滑动,从而加快其移动速度。
同时,磁悬浮牵引系统也涉及到了很多控制元件。
其中,电容器等电源元件可以为列车提供充足的电源,以支撑磁浮效应的产生。
此外,还有磁铁、功率放大器、伺服电机等伺服控制器,它们可以帮助列车控制其移动方向和速度,确保列车在不断地向前移动的同时可以避免出现任何的事故风险。
设计2:磁悬浮列车的牵引系统的设计磁悬浮列车的牵引系统具有很多特点。
其中,最显著的特点是其具有极高的自启动能力。
这意味着,即使在列车的速度相对比较低的情况下,它也可以依靠自身的磁浮推进力量在轨道上进行行驶。
除此以外,由于其不会产生任何烟尘和尾气,因此对于环境的影响也相对较小。
在牵引系统的设计中,重要的一点是要考虑通过电机转速的调节来实现对列车速度的控制。
这就需要对调节机构和控制器进行仔细设计,以确保列车可以准确地跟踪其速度和坐标位置,从而实现牵引和调速的功能。
设计3:磁悬浮列车的牵引系统的控制为了实现对磁悬浮列车牵引系统的控制,需要使用一些先进的控制技术。
其中,一个重要的技术是磁悬浮列车的PID控制技术,这种技术可以帮助控制器实现对列车末端位置的准确控制,从而避免出现操作失误和碰撞危险。
在进行控制时,需要对列车的各种控制信号进行精细的调节。
例如,可以通过控制轴承中的电磁铁产生的磁场对相关机构进行控制,从而实现对列车末端位置和速度的调整。
同时,其控制器还需要能够实时采集并处理来自各种传感器的信号,以帮助控制列车在运行过程中稳定地行驶。
总之,磁悬浮列车的牵引系统涉及到了很多的技术细节。
只有在合理的设计和控制下,才能确保列车能够在轨道上精准地行驶,并避免出现任何的事故和风险。
中低速磁浮列车双测速系统车辆控制
中低速磁浮列车双测速系统车辆控制摘要中低速磁浮列车不具备轮对结构,许多技术的成熟的城轨测速手段并不适用,保证速度信号的准度与精度尤为重要。
本文提到的双测速系统车辆控制方案充分规避了速度信号存在误差的情况,四路速度通道相互对比冗余,包含网络模式与应急模式下的控制策略。
关键词中低速磁浮列车多普勒雷达交叉环线强制速度模式1 前言城市轨道交通测速系统是列车重要的安全保障,其性能的精度与实时性直接影响列车的牵引运行以及自动防护系统的安全性。
目前列车测速系统形式多样,产品相对成熟,目前常用的测速系统有车轮脉冲发生器、光脉冲发生器、霍尔效应传感器、多普勒雷达传感器等。
中低速磁浮列车作为近年来大热的新型式城轨交通工具,行驶时车辆起浮与轨道无接触,由于不具备轮轨结构、采用直线电机作为牵引手段等独特性,许多技术成熟的轮对测速工具不适用于此车型,因此可供中低速磁浮列车选择的测速手段较少,通常包括多普勒雷达传感器、轨间电缆、交叉感应环线、测速信标等。
目前中低速磁浮列车测速多采用单测速系统双通道冗余方案,当某速度通道出现故障时,剩余一路速度信号依然满足控车需求;但当前采信速度信号准度出现偏差如丢包等现象时,列车牵引系统无法辨别,依然使用问题速度进行控车,进而对牵引控制产生了影响。
考虑到中低速磁浮采用的测速工具应用不如轮对测速工具广泛,一种可靠的测速系统控制方案对于列车安全性来说极为重要。
2 设计方案针对中低速磁浮列车单测速系统双通道方案现有的不足,本文提到的控制方案在此基础上增加一套测速系统,两种速度信号同时参与列车牵引制动控制,且当某一速度通道发生故障时具备一定的冗余能力保证列车正常运行的功能。
方案具体如下:一种中低速磁浮列车双测速系统车辆控制方案,列车包含两种测速系统,两种110V脉冲速度信号采取一主一从方式同时参与列车控制,DCU (列车传动控制单元)实时对比同一测速系统两路速度信号以判断其准确性,TCMS(列车网络控制系统)根据DCU速度值反馈及故障信息选择当前主要车辆控制速度信号,并具备无需停车即可切换速度信号的功能。
中低速磁浮交通系统
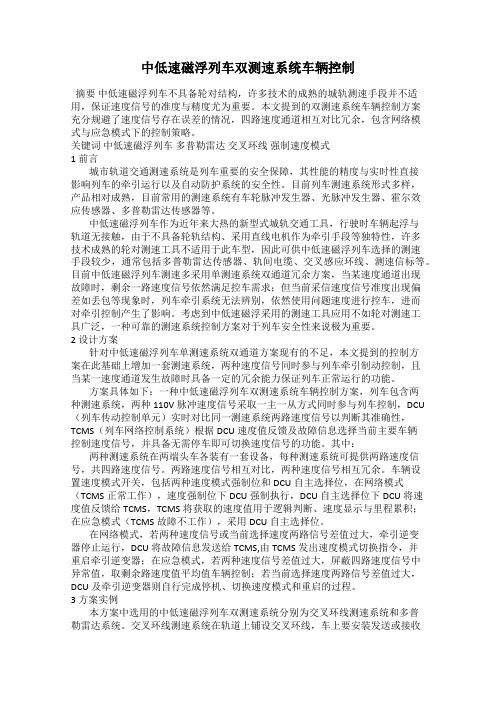
目前,世界范围内运营的中低速磁浮线路有四条,分别是日本名古屋东部丘陵线、韩国仁川机场磁 浮线、以及我国长沙磁浮机场快线和北京S1线。
中低速磁浮系统工程综合造价与轻轨相当。磁浮列车由于悬浮运行,并采用直线电机牵引,其车公 里能耗一般比旋转电机牵引的传统轮轨系统高15-20%,然而,由于其运行过程中没有机械摩擦阻力、车 站主要为高架车站等原因,其人公里综合能耗反而比传统轮轨系统低。磁浮列车没有车轮、齿轮、链条 等传动装置,避免了机械磨损,因此其列车运行维修费用低于传统轮轨列车。
名古屋东部丘陵线为爱知世博会所建,于2005年3月6日开通运营,线路总长度8.9公里(其中高架线 7.5公里,地下线1.4公里),共设9个车站,设计最高速度为100公里/小时,线路正线最小曲线半径为70 米,最大限制坡度为60‰,列车为3节编组,DC1500V三轨供电。
韩国仁川机场磁浮线,于2016年2月3日开通运营,线路总长度6.1公里,共设6个车站,设计最高速 度为80公里/小时,线路正线最小曲线半径为50米,列车为2节编组,DC1500V三轨供电。在车速为68公 里/小时,车内噪声测试为63.9分贝。
在系统构成上,与传统钢轮钢轨交通系统相比,中低速磁浮交通系统的特点主要体现在车辆、线路、 轨道和道岔。其轨道具有支撑磁浮车辆,承受车辆悬浮力、导向力及牵引力的功能,主要由轨道梁以及铺 设其上的导磁性能很好的F型轨组成。其道岔由主体结构、驱动、锁定、控制、信号等部分组成,按照结 构组成和转辙后的线路状态,可分为单开道岔、三开道岔、对开道岔、单渡线道岔和交叉渡线道岔。
中低速磁悬浮列车悬浮与牵引工作原理
中低速磁悬浮列车悬浮与牵引工作原理摘要:概述了中低速磁浮列车的技术特点,着重介绍了我国中低速磁浮列车悬挂牵引系统的工作原理。
与传统的轮式车辆相比,磁悬浮车辆的悬挂特性有助于克服车轮粘滞和运转噪音问题,有效延长磁悬浮车辆的使用寿命,减少日常保养和维修。
磁悬浮列车可以成为未来理想的地面交通工具。
关键词:中低速磁悬浮列车;悬浮系统;牵引系统前言中低速磁浮列车是城市轻轨运输系统,最高时速约100 ~ 150公里,具有效率、高性能、大容量、低噪音、低污染、低能耗等诸多特点,发展前景广阔。
适用于低流量和中等流量中心的低流量快速扩展线路,例如连接机场、城市郊区、工业区、主要娱乐场所的专用快速扩展线路,以及建筑密度高的大中型城市的灵活下行线路作为高技术轨道交通项目的前期工作,低速轨道交通需要严格的安全、可靠性和冗馀性要求,这要求列车维修管理具有科学规划、状态监测、过程控制、历史可追溯性和共享性。
1中低速磁悬浮列车悬浮原理磁悬浮列车的悬挂力基本上是由电子产生的电磁重力产生的排斥力,用于磁悬浮列车的悬挂和定向,然后可以分别安装一次和两次直线电机,用于列车的驱动。
目前,中低速磁浮列车的内侧轨道主要采用f型轨道,f型轨道的下行部分相当于轨道末端的振荡器,在轨道上产生相应的电磁重力目前,中国的中低速列车没有配备专用导电仪。
列车转弯时,f轨道电极与悬挂式电磁铁位置不正确,形成横向转向力,电磁铁转向力与列车上的强制转向机构协调,实现悬挂式支承的曲线调整。
列车悬架系统依靠间隙传感器采集控制数据并将其传递给悬架控制器。
悬架调节器运行后,向着色器发出指令,调节输出到电极的电流-磁铁,实时动态调整悬架间隙,使其保持在允许的波动范围内。
间隙传感器通常固定在电极上-磁铁,用于测量极板顶部表面与轨道底部表面之间的间隙,形状为“f”,并测量车辆的垂直加速度。
分离传感器的探测表面应尽可能平行于轨道表面。
间隔传感器具有超收功能,单个间隔传感器可以产生多个间隔和加速度信号,每个信号通过各自的串行通信接口传递给悬挂控制器。
中低速磁悬浮列车牵引计算及特性分析
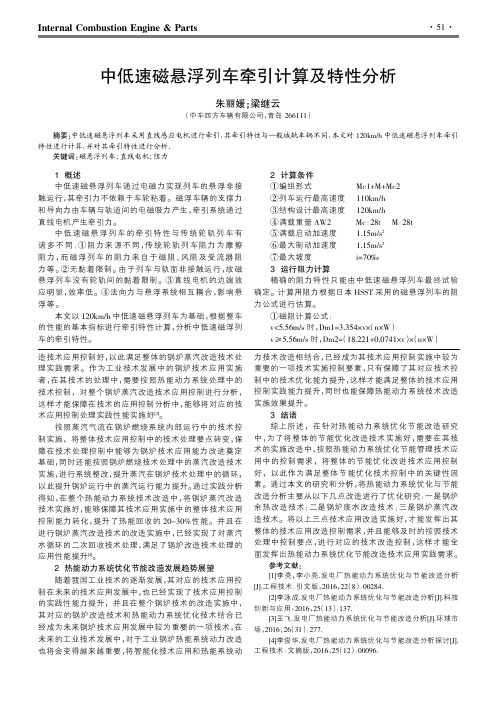
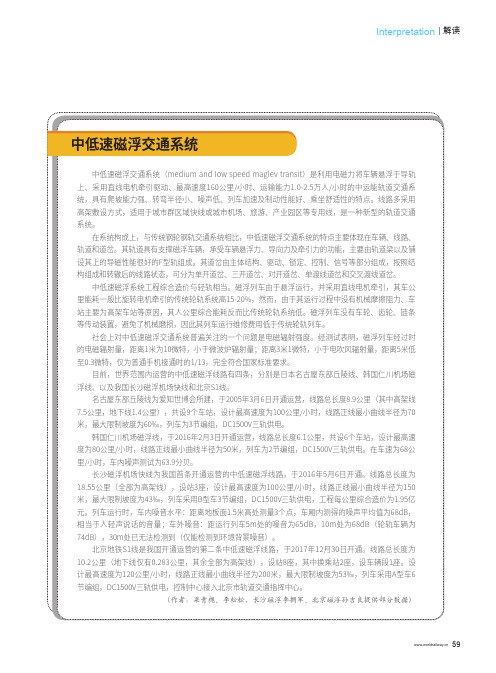
的增加,风阻逐渐超过电磁阻力。
图1阻力特性曲线
4牵引特性计算
4.1牵引计算
磁悬浮列车功率与运行速度、运行阻力以及最高运行时的剩余加速度有关。
根据整车基本性能通过牵引特性计算对牵引功率进行估算。
中低速磁悬浮列车牵引力计算公式为:
F牵引力-F运行阻力=Wa
式中:W为车重,a为剩余加速度。
根据列车运行阻力及启动加速度值可得:列车启动牵引力F=97kN。
由于要求加速到80km/h的加速距离在600m以内,由此,牵引电机功率选择45km/h对应的41kW 功率能够满足磁悬浮列车的牵引需求。
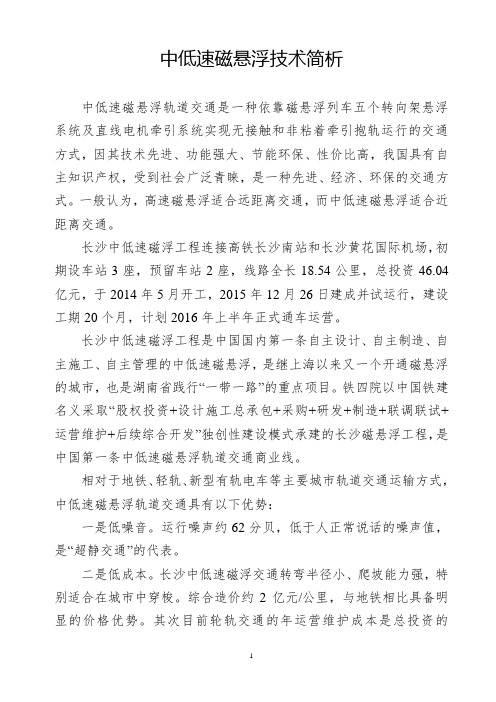
根据确定的持续速度点绘制AW2牵引特性曲线如图2所示。
图2AW2载荷牵引力、加速度特性曲线
4.2制动计算
根据列车运行阻力及最大减速度值可得:列车最大制动力F=102kN。
5运行特性分析
5.1牵引特性
列车最大启动牵引力为:F=97kN;
恒牵引力范围为0~45km/h;
自然特性速度范围为45~120km/h;
自然特性起始点列车牵引力为97kN;
单个牵引电机最大牵引功率约为41kW。
载荷速度范围(km/h)平均加速度(m/s2)
AW20-450-120 1.070.33
AW30-450-1200.930.28
表1列车平均加速度
牵引系统按列车重量从空车AW0到定员载荷AW2范围内自动调整牵引力的大小,使列车在空车AW0至定员载荷AW2范围内保持启动加速度基本不变。
超员载荷AW3条件下的牵引特性与定员载荷AW2一致。
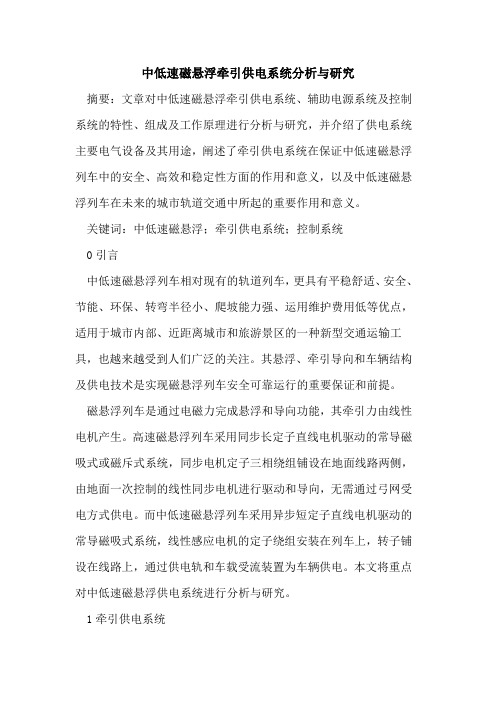
5.2制动特性
图3AW2载荷电制动力、减速度特性曲线。
中低速磁浮列车运行模式及其转换规则要求

2020年中低速就藩列车运荷蟆式0宴挎换规则要求杨明华(中铁建电气化局集团第四工程有限公司,410116,长沙〃高级工程师)摘要中低速磁浮列车的运行模式及转换规则对列车运营效率及运营安全至关重要。
结合长沙磁浮快线工程实践及相应的标准规范,提出了适用于中低速磁浮列车的运行模式及其转换原则。
研究成果有助于避免未来出现多城市中低速磁浮列车运行模式标准不统一的情况,有助于提高中低速磁浮列车的运营效益。
关键词中低速磁浮交通;信号系统;运行模式;转换规则中图分类号U268.4:U237DOI:10.16037/j.l007-869x.2020.01.010Operation Mode and Transition Principle for Medium and Low Speed Maglev TrainYANG MinghuaAbstract The operation mode and transition rules for medium and low speed maglev train is crucial to the train operation efficiency and operation safety.According to the engineering construction and related standard regulations of Changsha Maglev Express,the operation mode and transition rules adapting to the medium and low speed maglev train are proposed.Aiming at avoiding the future non-uniformity of operation mode standards for medium and low speed maglev train in more cities,the research result helps to improve the overall operation interests of the medium and low speed maglev train.Key words medium and low speed maglev;signaling system;operating mode;transition ruleAuthor's address The Fourth Engineering Co.,Ltd.,China Railway Construction and Electrification Bureau Group, 410116,Changsha,China随着应用技术成熟程度的不断提高,中低速磁浮交通系统作为一种新型轨道交通制式,逐步成为城市规划者关注的重点。
中低速磁浮列车的动力系统设计与性能研究

中低速磁浮列车的动力系统设计与性能研究摘要:本文研究了中低速磁浮列车的动力系统设计与性能,首先介绍了中低速磁浮列车的概念和特点,然后分析了磁浮列车的动力系统设计原理,包括线圈和磁轨的结构设计、能量传递和首要性能指标等。
接着,我们就动力系统设计中的关键问题进行了详细的研究,包括线圈和磁轨参数的选取、能量传递效率的优化以及动力系统的可靠性和安全性等。
最后,通过实例分析了动力系统设计与性能研究的有效性和可行性,从而得出结论并提出未来研究的方向。
关键词:中低速磁浮列车;动力系统设计;性能研究;线圈和磁轨;能量传递;可靠性和安全性1. 引言中低速磁浮列车是一种以磁悬浮技术为基础、适用于城市间交通的新型交通工具。
与传统的铁轨交通相比,中低速磁浮列车具有较高的速度、较低的能耗和较小的环境污染等优势,因此受到了广泛关注。
其中,动力系统设计和性能研究是中低速磁浮列车研究的重要组成部分,对于实际运行和发展具有重要意义。
2. 中低速磁浮列车的特点中低速磁浮列车作为一种新型的交通工具,具有许多独特的特点。
首先,它可以在较小的轨道半径上运行,因此适用于城市间交通。
其次,中低速磁浮列车的速度范围通常在120 km/h以下,因此相较于高速磁浮列车而言,其技术要求较低。
此外,中低速磁浮列车具有较低的能耗和噪音,对环境的污染也相对较小。
3. 磁浮列车的动力系统设计原理磁浮列车的动力系统设计原理主要包括线圈和磁轨的结构设计、能量传递和首要性能指标等。
线圈和磁轨的结构设计需要考虑到制造工艺、成本和稳定性等因素,以确保磁浮列车能够稳定运行。
能量传递是动力系统的核心问题,通过磁场能量传输,实现对列车的驱动和制动。
首要性能指标包括加速度、速度、效率和可靠性等,这些指标决定了磁浮列车的运行效果和性能。
4. 动力系统设计的关键问题动力系统设计中存在许多关键问题需要解决。
首先是线圈和磁轨参数的选取问题,考虑到制造难度、磁场稳定性和安全性等因素,选取合适的参数是关键。
中低速磁浮交通概述

03
中低速磁浮交通技术发展现状与 趋势
中低速磁浮交通技术发展现状
国内外研究与应用情况
中低速磁浮交通技术已在国内外得到 广泛研究与应用,如中国、日本、德 国等国家均已建成多条中低速磁浮交 通线路,用于城市交通、旅游观光等 场景。
技术特点与优势
中低速磁浮交通技术以其低噪音、低 振动、低污染、高速度、高安全等优 点,成为城市交通发展的重要方向之 一。
总结三
需综合考虑社会、经济和 环境效益
启示二
加强技术研发和标准化工 作
总结二
技术成熟度和资金投入是 关键因素
启示一
推广中低速磁浮交通需因 地制宜
启示三
促进产业合作和创新发展
THANKS
感谢观看
中低速磁浮交通技术的未来展望
技术成熟与产业升级
随着中低速磁浮交通技术的不断成熟,相关产业链将进一步完善, 推动产业升级和高质量发展。
国际化发展
中低速磁浮交通技术将逐步走向国际化,加强国际合作与交流,共 同推动磁浮交通技术的发展和应用。
社会经济效益提升
中低速磁浮交通技术的广泛应用将带来显著的社会经济效益,提高城 市交通效率,改善居民出行体验,促进城市可持续发展。
中低速磁浮交通系统的组成与工作原理
组成
中低速磁浮交通系统主要由磁浮列车、轨道、供电系统、信 号控制系统、车站等部分组成。
工作原理
通过磁力作用,使列车悬浮于轨道之上,实现无接触运行。 磁浮列车通过直线电机驱动,实现前进、后退和制动等动作 。轨道通常采用高架或地面铺设,供电系统提供列车所需电 力,信号控制系统确保列车安全运行。
04
中低速磁浮交通的实践案例与效 果分析
中低速磁浮交通实践案例介绍
中低速磁浮交通系统基本原理课件

支承
导向
无接触
驱动
制动
供电
2
磁浮交通系统
基本原理
3
磁浮交通系统
磁浮的核心概念-----无接触、无脱轨
无脱轨
以机械环抱的方式,消除脱 轨的可能性
4 死亡40人温州
死亡101人德国
死亡70人胶济
磁浮交通系统
磁浮交通系统构成 核心子系统
轨道系统-----支承、导向和驱动 供电系统-----驱动、速度、加速、减速 车辆系统-----载客量、舒适性、安全性 运行控制系统---安全性、可靠性、运输能力
磁浮列车的车轨关系和无接触特点, 使其具有更高的安全性,更灵活的适应地 形能力和更环保。
16
磁浮交通系统
长沙项目主要技术参数
车宽(mm) 轨距(mm)
3,000 2,000
原则:
1 充分利用悬浮能力
17
2 考虑不同应用环境的需要
2,800 1,860
磁浮交通系统
长沙项目主要技术参数
最大坡度
最小平曲线 半经
磁浮交通系统
什么是磁浮交通系统
在传统轮轨铁路技术发展100年后,针 对轮轨技术运用中存在的局限,科技人 员研发出的新一代轨道交通系统。
解决轮轨铁路运行中存在的脱轨、磨损 、爬坡能力、噪声等问题提出了革命性 的技术解决方案,使列车可跑得更快、 运行成本更低、更适应地形变化。
•1
磁浮交通系统
磁浮的核心概念-----无接触、无脱轨
其它子系统 FAS、BAS、车站、照明、通风、、、、
5
磁浮交通系统
轨道系统(线路)
6
磁浮交通系统
轨道系统(轨道)
7
磁浮交通系统
轨道系统(道岔)
磁悬浮列车控制工作原理

磁悬浮列车控制工作原理磁悬浮列车是一种通过磁力悬浮和推进的高速列车,相较于传统的轨道交通方式,磁悬浮列车具有更高的速度和更好的运行平稳性。
那么,磁悬浮列车是如何进行控制的呢?本文将以“磁悬浮列车控制工作原理”为题,探讨磁悬浮列车的控制方式和相关技术。
一、悬浮系统控制磁悬浮列车的悬浮系统控制是基础中的基础,它主要包括两个方面:悬浮力控制和悬浮高度控制。
1. 悬浮力控制悬浮力控制是磁悬浮列车运行的关键,它通过调节列车与轨道之间的磁场相互作用,使得列车能够在磁场力的作用下浮起,并达到所需的悬浮力。
通常情况下,悬浮力的控制通过调节磁铁或超导体线圈中通电电流的大小来实现,电流的大小和方向决定了磁场力的大小和方向,从而控制列车的悬浮力。
2. 悬浮高度控制悬浮高度控制是指控制列车与轨道之间的垂直间距,确保列车能够在适当的高度上悬浮并进行正常运行。
通常情况下,悬浮高度的控制通过调节磁铁或超导体线圈的电流来实现,电流的大小决定了磁力的大小,从而间接影响了悬浮高度。
二、推进系统控制除了悬浮系统的控制外,磁悬浮列车还需要推进系统的控制,以确保列车能够实现高速行驶。
磁悬浮列车的推进系统控制主要包括两个方面:牵引力控制和速度控制。
1. 牵引力控制牵引力控制是指控制列车的牵引力大小,以实现列车的加速和制动。
通常情况下,牵引力的大小通过调节列车上的电磁铁电流来实现,电流的大小和方向决定了牵引力的大小和方向。
2. 速度控制速度控制是指控制列车的运行速度,确保列车能够按照预定速度行驶。
通常情况下,速度的控制通过控制牵引力和制动力的大小来实现,调节电磁铁电流的大小和方向,从而调节牵引力和制动力的大小。
三、安全系统控制除了悬浮系统和推进系统的控制外,磁悬浮列车还需要安全系统的控制,以确保列车在运行过程中的安全性。
安全系统控制主要包括列车与轨道之间的通信系统、列车位置和速度检测系统、列车追踪和监控系统等。
1. 通信系统通信系统用于列车与轨道之间的信息传递和指令传输,确保列车能够获得及时的运行指令并作出相应的反应。
磁浮列车运行控制系统综述

磁浮列车运行控制系统综述摘要内容:运行控制系统是磁浮列车的重要安全保障。
列车的安全控制逻辑绝大部分由运行控制系统执行,目前国外发展较为成熟的运行控制系统为德国与日本设计。
本文阐述了德国与日本的运行控制系统,同时对国内的运行控制系统总结性的进行了一定的介绍。
关键词:运行控制系统分区运行控制车载运行控制磁浮列车0引言我国经济的区域性发展,人口聚集效应明显,但随之带来的是交通的拥堵,轨道交通已成为解决市内及城际间交通问题的有效手段。
随着轮轨列车逐渐达到速度极限,传统的动力方式已无法实现更高的速度要求,由此磁浮列车应运而生,磁浮列车采用抱轨运行方式,不存在列车脱轨风险,由于浮空运行,因此噪音极小。
目前磁浮交通已经在长沙、北京、上海等地相继开通,我国的磁浮交通行业开始进行实际运营阶段。
磁浮列车主要分为牵引、运行控制、线路、车辆等多个系统组成,其中运行控制系统对保障列车安全至关重要。
本文通过分析国内外的磁浮列车运行控制系统的技术特点,总结归纳了不同国家运行控制系统的发展情况。
1运行控制系统概述运行控制系统是磁浮交通的“大脑”,运行控制系统与多个系统耦合关联,包括车辆、牵引系统、线路系统等。
其将不同系统之间的数据进行判断整合、传输,实现系统间的通信及安全逻辑判断。
运行控制系统细分功能为:列车状态操作与显示、自动驾驶控制、驾驶模式转换、进路运行防护、道岔转辙防护、最大最小速度曲线监控、牵引安全切断控制、数据传输、制动触发等任务。
运行控制系统由中央控制CCS、分区控制DCS、车载控制VCS三部分构成。
中央运行控制系统是列车操作显示系统,主要包括三部分:自动运行控制、操作员终端系统、中央诊断系统。
车辆无线等系统将运行过程中的列车与线路状态实时反馈给中央操作员,中央操作员根据相关反馈手动完成磁浮列车运行时刻表的配置,设置列车数量、制动测试、线路信息添加、车辆控制等。
列车自动运行控制系统可对非CR校验指令进行自动排布,中央操作员根据实际运营经验对中央的指令按顺序进行设置,当执行时刻表时,自动运行控制系统将每条指令依次执行,充当操作员终端作用。
中低速磁浮总体技术介绍

动态
≦2250Pa
运行环境:
海拔高度
≦1200m
相对空气湿度
≦100%
全天候运行,并能承受风、沙、雨、雪的侵袭
大气环境温度:
标准工况
-15ºC~+45ºC
车辆平稳性指标:不大于GB5599-1895 中规定的2.5
运控系统: ATC模式,包括ATO、ATP、ATS
Hale Waihona Puke 车钩:自动车钩供电方式:
载
测
控
测
载
天
系
制
系
天
线
统
系
统
线
2
2
统
1
1
车载子系统
编码电缆子系统
1#地面站 地面站子系统
终端箱
段间箱 段间箱
段间箱
编 码 电 缆
段间箱
段间箱 段间箱
3#地面站 4#地面站 5#地面站 6#地面站
终端箱 2#地面站
地面站子系统包括若干地址发生器箱,每一个箱内 有载波发生器和电源模块等
车载子系统由车载控制器、车载接口板、串口隔离 器、电源、天线箱组成。
行组织模式。虽然该模式满足了世博会期间的客流,
但对于中等规模城市的交通来讲,远不能满足单位 截面小时单方向2~3万人的要求。
在保证单方向2~3万人/小时 截面运能的条件下, 列车编组可为:E+M+M+M+M+M+M+E的8 节编组,满足的列车载客量不低于1080人,
车辆
坐席
站位
额定
超员
端车E 中车M 六节编组运能: 2×E+4×M
式实现列车位置信息的采集。利用速度位置脉冲, 车载设备可以计算出列车行驶的相对位移。沿线每 隔一定距离设置一个地面应答器,车辆经过时可以 得到所处的绝对位置,用以矫正交叉感应线圈带来 的累计误差。
中低速磁浮车的牵引控制系统

第1节
磁浮列车与直线电机
磁浮车是一种新的交通工具,研究的重点
上海磁浮车(德国TR08)
HSST 磁浮车(日本)
交大 MST-1 磁浮车
青城山磁浮车
国防科大磁浮车
常导型磁浮列车利用电磁吸力实现悬浮
磁浮列车利用直线电机实现牵引、制动
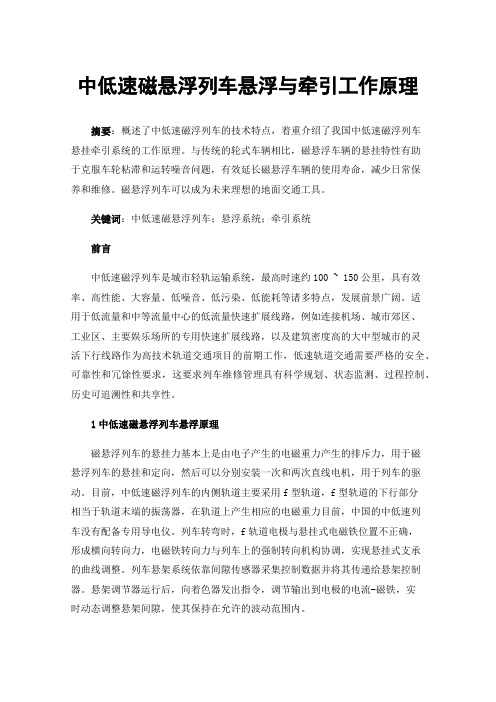
直线电机的基本结构
LIM的推力与初级电源频率的关系 假定初级电压大小不变,仅仅改变初级电压的频 率。由推力计算式知,推力反比于初级频率变化
0
10Hz
20Hz
30Hz
40Hz
当按I1=C1,f2=C2控制时LIM的推力表达式
3R ( I ) 3R ( I ) Fx 2f1s 2f 2
I2
' 2
' 2 2
' R2 ' 2 Pem 3 ( I 2 ) s ' ' 2 ' ' 2 3R2 (I 2 ) 3R2 (I 2 ) Fx 2f1s 2f 2 U1
' I2
R ' 2 ( 1R1 ) ( 1 X 1 129; 2 2
1 (1 X1 / X m )
当按u/f=C控制时LIM的推力表达式
3R Fx 2f1s
' 2
U1
' R ' 2 ( 1 R1 12 2 ) 2 ( 1 X 1 12 X 2 ) s 当按U/f=C控制时LIM的推力特性
0
10Hz
20Hz
30Hz
40Hz
LIM很大的初级阻抗削弱了电机的磁场。随着频率 升高,初级电压也增大,初级阻抗的影响相应减小
中低速磁悬浮技术简析
中低速磁悬浮技术简析中低速磁悬浮轨道交通是一种依靠磁悬浮列车五个转向架悬浮系统及直线电机牵引系统实现无接触和非粘着牵引抱轨运行的交通方式,因其技术先进、功能强大、节能环保、性价比高,我国具有自主知识产权,受到社会广泛青睐,是一种先进、经济、环保的交通方式。
一般认为,高速磁悬浮适合远距离交通,而中低速磁悬浮适合近距离交通。
长沙中低速磁浮工程连接高铁长沙南站和长沙黄花国际机场,初期设车站3座,预留车站2座,线路全长18.54公里,总投资46.04亿元,于2014年5月开工,2015年12月26日建成并试运行,建设工期20个月,计划2016年上半年正式通车运营。
长沙中低速磁浮工程是中国国内第一条自主设计、自主制造、自主施工、自主管理的中低速磁悬浮,是继上海以来又一个开通磁悬浮的城市,也是湖南省践行“一带一路”的重点项目。
铁四院以中国铁建名义采取“股权投资+设计施工总承包+采购+研发+制造+联调联试+运营维护+后续综合开发”独创性建设模式承建的长沙磁悬浮工程,是中国第一条中低速磁悬浮轨道交通商业线。
相对于地铁、轻轨、新型有轨电车等主要城市轨道交通运输方式,中低速磁悬浮轨道交通具有以下优势:一是低噪音。
运行噪声约62分贝,低于人正常说话的噪声值,是“超静交通”的代表。
二是低成本。
长沙中低速磁浮交通转弯半径小、爬坡能力强,特别适合在城市中穿梭。
综合造价约2亿元/公里,与地铁相比具备明显的价格优势。
其次目前轮轨交通的年运营维护成本是总投资的4.4%左右。
中低速磁悬浮轨道交通后期维护费用较低,年运营维修费理论值约为总投资的1.2%。
三是低辐射。
经科学检测,长沙磁浮交通辐射值1米外小于电磁炉、3米外不到微波炉的一半、5米外比电动剃须刀更低,堪称绿色“环保交通”的典范。
四是低震动。
列车沿轨道无接触运行,无车轮摩擦与冲击。
可实现有害气体零排放,由于没有车轮磨耗,也不会在运行中产生铁粉或橡胶粉尘,最大限度避免环境污染。
中低速磁悬浮牵引供电系统分析与研究
中低速磁悬浮牵引供电系统分析与研究摘要:文章对中低速磁悬浮牵引供电系统、辅助电源系统及控制系统的特性、组成及工作原理进行分析与研究,并介绍了供电系统主要电气设备及其用途,阐述了牵引供电系统在保证中低速磁悬浮列车中的安全、高效和稳定性方面的作用和意义,以及中低速磁悬浮列车在未来的城市轨道交通中所起的重要作用和意义。
关键词:中低速磁悬浮;牵引供电系统;控制系统0引言中低速磁悬浮列车相对现有的轨道列车,更具有平稳舒适、安全、节能、环保、转弯半径小、爬坡能力强、运用维护费用低等优点,适用于城市内部、近距离城市和旅游景区的一种新型交通运输工具,也越来越受到人们广泛的关注。
其悬浮、牵引导向和车辆结构及供电技术是实现磁悬浮列车安全可靠运行的重要保证和前提。
磁悬浮列车是通过电磁力完成悬浮和导向功能,其牵引力由线性电机产生。
高速磁悬浮列车采用同步长定子直线电机驱动的常导磁吸式或磁斥式系统,同步电机定子三相绕组铺设在地面线路两侧,由地面一次控制的线性同步电机进行驱动和导向,无需通过弓网受电方式供电。
而中低速磁悬浮列车采用异步短定子直线电机驱动的常导磁吸式系统,线性感应电机的定子绕组安装在列车上,转子铺设在线路上,通过供电轨和车载受流装置为车辆供电。
本文将重点对中低速磁悬浮供电系统进行分析与研究。
1牵引供电系统1.1牵引供电方式中低速磁浮列车的速度一般为100~200km/h,适用于城市公共轨道交通,包括市内交通、市郊交通、市中区至机场、中心城市至卫星城市以及区域性城市群交通。
城市轨道交通的特点决定了中低速磁悬浮列车的牵引供电须采用直流电流制,接触网为正极,钢轨为负极,机车从相邻两变电所取电,即采用双边供电方式。
其电压等级选用国家推荐的dc750v或dc1500v,变电所采用交直流牵引变电所,牵引供电方式与目前广泛使用的地铁和轻轨基本相同。
1.2牵引供电系统的组成牵引供电系统主要由牵引变电所、受流器、高压电器柜、主牵引逆变器、辅助牵引逆变器、dc/dc变换器及各种受电器构成。
中低速磁浮车辆技术详解

托臂 抗侧装置滚装置:
抗侧滚片梁安装座通过螺栓固定在托臂上,每个抗侧滚片梁安装 座上有两个关节轴承。两片相同的抗侧滚通过垫片梁块组装成一 个片梁组件,通过关节轴承与抗侧滚片梁安装座相连,连接后该 部件能够绕垂直轴转动。抗侧滚片梁吊杆两端有关节轴承,通过 关节轴承将吊杆与另一边的抗侧滚片梁组件连接起来,吊杆在沿 杆长方向应具有一定的拉压弹性和限位功能,因此吊杆为金属橡 胶件,吊杆的弹性技术参数应通过计算分析来确定。
紧急救援支撑轮的作用?为什么是两个轮子? 牵引拉杆的作用?
悬浮电磁铁用于产生电磁吸力,采用同时具备悬浮 和导向功能的U型磁铁,F型悬浮导轨(被迫导向功 能)使列车在运行中与轨道无接触。每节车5个悬 浮架共10个电磁铁,总悬浮重量32t/节,每个磁 铁绕制4组相同的线圈。电磁铁上需安装制动器、 传感器、横向限位止挡、防吸死板等。
悬浮架装置是直线牵引电机、悬浮电磁铁、空气弹 簧悬挂系统等多种组件的安装基础,是走行机构的 核心结构部件。悬浮磁铁安装在悬浮托臂的固定座 上,布置在车辆的两侧。同样直线电机安装在纵梁 的下部,布置在车辆的两侧。空气弹簧悬挂系统以 悬浮托臂的上方的“基洞”为安装位置与其上部的 滑台固定。在纵梁上表面与滑台之间安装牵引拉杆 装置。
每个端车的其中两个悬浮架装置上各安装两对受流 器装置。
中低速磁浮列车走行机构主要由以下15个部分组成:
(1) 悬浮架;(2) 悬浮电磁铁;(3) 空气弹簧悬挂系 统;(4) 滑台装置;(5) 迫导向机构;(6) 抗侧滚装 置;(7) 制动装置;(8) 滑橇;(9) 限位止挡装置; (10) 电机悬挂装置;(11) 液压支撑装置;(12) 牵 引拉杆装置;(13) 受流器装置;(14) 管线布置; (15) 列车接地装置。
磁悬浮列车车辆控制系统设计与优化

磁悬浮列车车辆控制系统设计与优化第一章:引言磁悬浮列车作为一种新型的高速交通工具,受到了越来越多的关注。
其采用磁力浮起,减小地面摩擦,可达到较高的速度及较大的载重量。
而磁悬浮列车的车辆控制系统则是其重要的组成部分,它负责对车辆进行稳定控制和安全控制。
本文将深入探讨磁悬浮列车车辆控制系统的设计与优化。
第二章:磁悬浮列车车辆控制系统基本原理磁悬浮列车采用磁力悬浮技术,通过车辆底部的磁铁与导轨上的电磁铁相互作用产生磁力,使车辆从地面上悬浮起来,并且利用电力驱动车辆在导轨上高速运行。
磁悬浮列车车辆控制系统包括车辆稳定控制和列车运行安全控制两个方面。
2.1 车辆稳定控制车辆稳定控制是指车辆在高速运行过程中保持水平稳定、平稳行驶,并通过控制系统使车辆尽可能地消除颠簸和震动。
其主要包括转向、起动和制动多个方面的控制,从而确保在高速运行中车辆的安全性和舒适性。
2.2 列车运行安全控制列车运行安全控制包括对列车整体和局部运行状况的监测,如轴重、列车速率、温度等,以及对列车的速度、位置等参数进行监测、控制和管理,并及时采取措施,以保证列车运行的安全性和稳定性。
第三章:磁悬浮列车车辆控制系统设计车辆控制系统主要由硬件和软件两部分组成,硬件是指车辆上各种传感器、执行器等控制设备,软件则是指控制算法和运行程序。
3.1 硬件部分硬件部分是车辆控制系统的骨架,包括传感器、控制器和执行器等。
传感器可以实时检测车辆运动参数,如车速、轴重、车体倾斜角等;控制器则是根据传感器反馈的信息进行计算控制车辆的加速度、制动力等;执行器则是控制车辆运动的设备,实现车辆的加速、制动、转弯等操作。
3.2 软件部分磁悬浮列车车辆控制系统的软件部分主要由控制算法和运行程序组成。
控制算法是指根据传感器反馈的信息,计算车辆的控制量的算法,如车速控制算法、制动控制算法等;运行程序则是指控制系统内部控制逻辑的程序。
第四章:磁悬浮列车车辆控制系统优化优化车辆控制系统是为了在满足指定的性能要求的情况下,最大限度地提高其效率和安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用等值电路概念时推力的表达式
Pem FxVs Fx 2f1
Pem
3
R2' s
(
I
' 2
)
2
Fx
3R2'
(
I
' 2
)2
2f1s
3R2'
(I
' 2
)
2
2f2
I
' 2
U1
(1R1
12
R2' S
)2
(1X1
12
X
' 2
)
2
1 (1 X1 / X m )
直线电机的基本结构
• 直线电机可看作是将旋转电机径向剖开展平 • 定子—初级,转子—次级 • 初级与次级长度不相等。
短初级直线异步电机(HSST)
长初级直线异步电机(西南交大)
第2节 直线异步电机(LIM)的控制特性
LIM控制方式取决于其应用场合。LIM控制策略与 应用目标相关
由电磁场分析知,LIM的推力是
Rr s
Xm
在等值电路中,定子边即初级;转子边是次级。 旋转电机的转矩对应直线电机的推力
推力-速度曲线
推力F
电磁制动
电动机
发电机
-∞
+∞
S=1
S=0
电机在S=1处起动运行。当运行速度提高,推力也增 大。越过峰值后,速度增高推力下降。从起动到峰 值点前是不稳定运行区域,峰值点后为稳定区
LIM的特点 由于终端效应的原因,推力为零的点不在同步速 对应点 当电机次级运行速度超过同步速后,电机工作于 发电机状态 在越过峰值前为稳定工作区;越过峰值点后,为 不稳定区 在相同的初级电流和频率下,处于发电状态时的 制动力比处于牵引状态时的牵引力要大
Fy Fy1 Fy2
在讨论电机的控制方式时,应当了解电机初级中电 流与频率变化时电机推力和垂向力的变化规律
1 直线异步电机的等值电路 直线异步电机也是异步电机。在低速情况下直
线与旋转电机是相近的
可以用异步电机的等效电路的方法来分析LIM
RS
XS
Xr
U S
IS ES Er
Rm Ir Im
涡流斥力
转差 频率
电机合成法向力 磁场吸力
选择合适的转差频率值可以使总法向力较小
初级电流和转差频率恒定时LIM的垂向力特性
初级 电流
5Hz 10Hz
15Hz 20Hz
当不考虑终端效应等影响时,电机的法向力为 常数。转差频率越大,法向力越小。法向力正 比于初级电流的平方。大体上反比于转差频率
LIM的推力、法向力与转差频率的关系
3 受到速度检测信号精度及控制误差的限制 当转差频率确定后,在一段频率范围内,电机可 以实现恒转差频率恒电流运行。 当初级频率超过转折值后,由于电机的定子电压 不能再增高而电机阻抗随定子频率的增高而增大, 定子电流就不可能恒定。由于推力与定子电流的 平方成正比,推力将显著下降。 若增大转差频率,则减小了电机的输入阻抗,定 子电流可以维持在额定值。 这表明在进行电流转差频率控制时,电机的转差 频率f2在不同的区域内有不同的变化规律
推力F
I1
I2
1
0
这表明,控制初级电流可有效地控制推力
实际LIM按恒电流恒转差频率控制时的特性
推力F
0
10Hz
20Hz
30Hz
40Hz
速度 m/s
电机推力并不严格为常数。原因是终端效应的 影响。此外,由于电机次级采用反应板结构也 是一个原因
当初级电流和频率恒定时LIM的垂向力特性
LIM在工作时除产生切向推力外还产生法向力。 从法向力公式知,其大小与磁密有关。法向力不 容忽视,它可以超过推力数倍或数十倍
推
吸
力
推力
力
吸力
F2=20Hz
转差频率
F2=0Hz
在确定电机的转差频率值时,应当在吸力与推 力之间折衷。例如选取合适的f2值,使吸力在 系统容忍的范围内。
第3节 LIM的电流-转差频率控制
从上节分析知,采用电流转差频率控制方式可有 效地控制推力并将电机的法向力控制在不大的数 值上。所以,磁浮车大多均采用这种控制方式 转差频率的确定是控制的关键 从推力速度特性曲线知,若用推力峰值附近的转 差频率值进行控制,可以使电机的推力最大。但 要受到如下因素的限制 1 垂向力的限制 2 受电机功率因数-效率乘积的限制。而这个参 数与变流器的容量、体积与重量相关
中低速磁浮车的牵引控制系统
西南交通大学电气工程学院 郭小舟
第1节 磁浮列车与直线电机
磁浮车是一种新的交通工具,研究的重点
上海磁浮车(德国TR08)
HSST 磁浮车(日本)
交大 MST-1 磁浮车
青城山磁浮车
国防科大磁浮车
• 常导型磁浮列车利用电磁吸力实现悬浮
• 磁浮列车利用直线电机实现牵引、制动
当按u/f=C控制时LIM的推力表达式
Fx
3R2'
2f1s
( 1 R1
2 1
R2' )2 s
U1
(1 X1
2 1
X
' 2
)2
当按U/f=C控制时LIM的推力特性
0 10Hz
20Hz
30Hz
40Hz
LIM很大的初级阻抗削弱了电机的磁场。随着频率 升高,初级电压也增大,初级阻抗的影响相应减小
Fx
1 2
L 0
Re[
J1*
(
x,
t
)
b3
y
]dx
LIM工作时除产生推力外还有垂向力。计算式为
Fy1
1 2
L 0
Re[b3*y
b3 y
]dx
当气隙磁场有x分量时,LIM垂向力还要增加一项
Fy2
1 2
L 0
Re[
J1*
(
x,
t
)
b3
x
]dx
这时,LIM的垂向力(也称为法向力,磁拉力)为
Lm (Lm
L'2 )2
I1
3
Fx 2
R2' f2
f2 R2'
(2Lm )2 (2 )2 (Lm
L'2
)2
I12
当按I1=C1,f2=C2控制时LIM的推力特性
0
10Hz
20Hz
30Hz
40Hz
由图可知,推力为常数。推力的大小与初级频率 无关
LIM的推力与初级电流的关系 假定初级的频率不变,只改变初级电流大小。由 推力计算式知,推力正比于初级电流的平方
LIM的推力与初级电源频率的关系 假定初级电压大小不变,仅仅改变初级电压的频 率。由推力计算式知,推力反比于初级频率变化
0
10Hz
20Hz
30Hz
40Hz
当按I1=C1,f2=C2控制时LIM的推力表达式
Fx
3R2'
(I
' 2
)2
2f1s
3R2'
(
I
' 2
)2
2f2
I2
( R2' )2 s
1800 Fnormal(N)
1600 1400 1200 1000
Fn40A Fn45A Fn60A
800
600
400
200
0
s
1.0
0.8
0.6
0.4
0.2
0.0
在LIM中,初级产生的磁场与次级铁轭产生吸力; 初级磁场与反应板的涡流作用产生斥力;初级产 生的磁场与次级铁轭的涡流作用产生斥力
推力F