新型灭火机器人:两足行走可穿复杂地形
消防机器人灭火救援应用技术分析

消防机器人灭火救援应用技术分析摘要:随着科技的飞速发展,机器人的出现是人类历史上的另一项重大发明。
在这一背景下,利用机器人的智能化、自动化等技术特性,使其取代了以往的灭火救援工作,从而为目前的灭火救援工作带来了新的思路。
然而,要使消防机器人发挥其应有的功能,就必须对其技术进行充分的了解,本文对目前国内消防机器人的使用状况进行了较为详尽的阐述,并对今后的发展趋势进行了探讨。
关键词:消防机器人;灭火救援;应用技术前言现在的社会,安全事故的类型和频率越来越高,各种化学品、放射性物质的泄漏、燃烧甚至是爆炸,都是一件非常危险的事情。
这种情况下,消防队员们必须要进行紧急救援,这是一种非常困难的情况,在没有合适的设备的情况下,很有可能会危及消防队员的生命,救援工作很难进行。
随着技术的进步,消防机器人作为一种特殊的机器人,在灭火救援中发挥了巨大的作用。
一、消防机器人发展概述消防机器人是现代科学技术的发展与革新,是一种特殊的机械,它可以在灭火救援等方面发挥出不可思议的作用,可以帮助消防队员,甚至逐步替代消防员,从而保证消防人员的生命安全。
随着各类大型石化企业的不断增多,隧道、地铁等工程的数量不断增多,安全事故也日益增多,对人们的生命构成了极大的威胁。
另外,由于此类灾害具有突发性,危害极大,处置难度大,又缺少有效的控制措施,此类危害已成为一个严重的社会问题。
而消防机器人的出现,则是一种非常有效的方法,可以让消防机器人在最危险的地方进行紧急处置,同时也可以收集到大量的事故资料,进行紧急救援,同时还能及时地反馈到现场情况,为指挥人员做出准确的判断,从而更好地解决事故,减少灾害的规模,减少损失。
二、消防机器人的分类与现阶段所呈现出的优缺点(一)分类第一,按照功能划分,主要包含灭火、排烟、侦查、救援等功能;第二,根据控制模式的不同,将其划分为有线、无线严控、自适应等;第三,按步行模式划分,可分为履带式、履带式等;第四,根据感官功能的不同,可将其划分为视觉型、温感型、嗅觉型、烟感型等;第五,按照智能化的程度来划分,分为程序控制和智能控制两类。
足式行走机构的特点

足式行走机构的特点一、什么是足式行走机构足式行走机构是指模仿真实生物动物的足部结构和行走方式设计和制造的机械装置。
足式行走机构在许多领域拥有广泛的应用,如机器人、智能交通工具等。
其特点是能够实现更高效、更灵活地移动,同时具备适应不同地形和环境的能力。
二、足式行走机构的优势1.适应性强:足式行走机构可以适应各种地形和环境,包括平坦地面、崎岖山路、不规则地形等。
通过灵活的足部结构和行走方式,可以在各种复杂的场景中移动。
2.灵活性高:足式行走机构具备多自由度的特点,能够完成各种复杂的运动任务。
通过调整步态和步频,可以实现不同速度和方向的移动,适应不同工作需求。
3.效率高:足式行走机构能够在不同的地形上行走,不受路面条件的限制。
相比于轮式行走机构,足式行走机构能够克服更多的障碍物,提高行进效率。
4.稳定性强:足式行走机构通过控制器和传感器实时检测地面情况,并根据反馈信息做出相应的调整,保持机构的平稳行走。
通过分析地形信息,可以调整足部的形态和步态,提高机构的稳定性。
5.负载能力大:足式行走机构的足部结构经过合理设计,可以承载较大的负载。
通过调整步态和步频,可以适应不同负载下的行走需求。
三、足式行走机构的分类根据足部结构的不同,足式行走机构可以分为多种类型:1.两足式行走机构:模仿人类行走方式,具有两只脚,可以实现站立、行走等动作。
两足式行走机构主要应用于机器人领域,如人形机器人、辅助行走装置等。
2.多足式行走机构:具有多个足部结构,可以实现更稳定的行走。
多足式行走机构主要应用于机器人和移动平台等领域,如巡检机器人、搜救机器人等。
3.轮足混合式行走机构:将轮子和足部结合起来,既可以实现轮式行走的高效率,又可以克服一些障碍物实现足式行走的灵活性。
四、足式行走机构的应用领域足式行走机构在许多领域都有广泛的应用:1.机器人领域:足式行走机构可以实现机器人的自主行走能力,提高机器人的运动灵活性和适应性。
在灾难救援、工业生产等领域,足式行走机构可以帮助机器人完成更多的任务。
无人机在建筑消防灭火救援中的应用研究

无人机在建筑消防灭火救援中的应用研究无人机因其轻便、速度快、体积小等优点而受到专家们的青睐,被广泛地用于救援。
在某些特定的环境下,使用无人机不但可以帮助消防救援人员完成灭火任务,还可以极大提升救援工作成功率,在消防救援领域有着广阔的应用前景。
通过对无人机在建筑消防灭火中高效运用方法的研究,可以更好发挥其功能和价值,这对提升消防救援工作质量和效率,具有重要的理论和现实意义。
关键词:无人机;建筑消防;灭火救援;应用方法随着人们生活水平的不断提高,消防安全隐患也日益增多。
为了满足不同类型的火灾扑救需要,快速对火灾现场进行评估并实施营救是十分重要的工作步骤。
无人机设备可以与消防员协作,将救援工作的实施效果发挥到极致。
无人机设备具有更强的侦察和救援能力,飞行方式更加灵活,在火灾扑救工作中起到了很好的辅助作用。
一、应用于建筑消防灭火救援的无人机技术特性(一)智能化为了使无人机能够完成各种灭火任务,必须对其进行智能化的控制。
采用智能控制系统,不仅可以让无人机在火场作业时,最大限度收集到火情信息,而且可以实现多功能的展示。
无人机和智能技术的融合,极大提高了无人机的自主控制能力,即使是在危险的火场中,它也能按照预先设定的步骤进行正确的判断和分析,同时也能消除人为操作时的误判,让无人机能够在智能操作系统下做出科学反映和应对,从而极大提高无人机的安全性。
(二)稳定性将无人机应用在消防灭火救援工作中,不仅满足了消防救援人员的任务需要,同时也可以更有效保障救援人员的人身安全,使整个现场局势变得更加可控。
如果现场温度较高,且风速很大,则形势更易变化,若火势无法控制,将严重威胁消防员的人身安全。
(三)可靠性对突发大火的事故现场开展救援工作时,救援人员不仅要应对不同的情形,还要充分考虑到风力、烟尘含量、气温、防水性等因素,在运用无人机时,一定要把事故现场的所有条件都考虑进去,其中主要因素如下:一是抗风性,南方城市经常刮东南风和西北风,沿海地区的风速有很多差异,所以在正常航行时,也会受到大风的干扰。
电动轮履两用救援灭火小车的创新设计
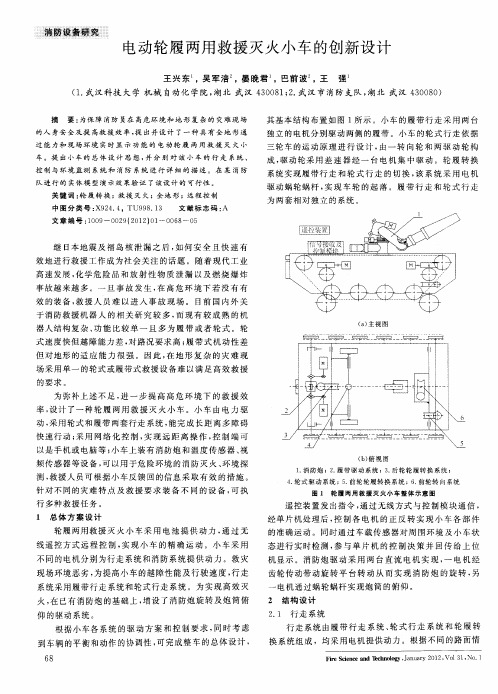
电机 均选 择 传 动 比 为 l 行星 减 速 电机 , 率 为 50 6的 功 0
1前 轮 ;. 架 ;. 架 ;. 轴 器 ;. 落 电 机 ; . 2叉 3车 4联 5起
6 转 向 电机 ;. 向 蜗 轮 蜗 杆 ;. 落 蜗 轮 蜗 杆 ; . 7转 8起 9 蜗 轮 轴 ;0 转 向轴 . 1. 图 2 轮 式 行 走 系统 前 轮 示 意 图
过 能 力 和 现 场 环 境 实 时 显 示 功 能 的 电 动 轮 履 两 用 救 援 灭 火 小
三 轮 车 的运 动 原 理 进 行 设 计 , 一 转 向 轮 和 两 驱 动 轮 构 由
成 , 动 轮 采 用 差 速 器 经 一 台 电 机 集 中驱 动 。轮 履 转 换 驱
车 。提 出 小车 的 总 体 设 计 思 想 , 分 别 对 该 小 车 的 行 走 系统 、 并
的 F me i 下 自定 义 串 口通 信 驱 动 示 例 模 板 进 行 二 次 a Ve w
开发的 。 .
考虑传 动系统 效率和行驶路 面 的复杂 性 , 根据 功率 、 力矩 的计算结果 , 用 70W 的无刷 电机 为小车 提供动 选 5
力 ( 额 定 转 速 40转 / n 额 定 扭 矩 为 1 . 2N ・ 。 其 8 mi, 4 9 m)
根 据 小 车 的设 计 要 求 , 履 带 驱 动 轮 为 1 0×5 负 重 其 3 0,
轮 为 中1 8×5 履 带 宽 度 为 1 0 ml , 度 为 38 0 mm; 8 0, 1 T 长 1 0
( ) 程通 信 : 程 通 信 采 用 某 公 司 的 解 决 方 案 , 3远 远 直 接通过 T P I C /P协议 由 Itre 通 信 。 nen t
复杂路况下双足机器人稳定行走的设计

THANKS
谢谢您的观看
复杂路况下双足机器人稳定 行走的设计
汇报人: 2024-01-02
目录
• 引言 • 双足机器人稳定行走的基本原
理 • 复杂路况对双足机器人稳定行
走的影响 • 双足机器人的设计与优化 • 实验与验证 • 结论与展望
01
引言
研究背景与意义
背景
随着科技的不断发展,双足机器人在许多领域具有广泛的应用前景,如服务、 救援、探索等。然而,在复杂路况下,双足机器人的稳定行走仍面临诸多挑战 。
意义
设计出能够在复杂路况下稳定行走的双足机器人,对于提高机器人性能、拓展 应用领域、推动相关技术的发展具有重要意义。
国内外研究现状
01
国内研究现状
国内在双足机器人稳定行走方面取得了一定的成果,如XX大学研制的
双足机器人能够在平坦路面上实现稳定行走,但面对复杂路况仍存在不
足。
02
国外研究现状
国外在双足机器人技术方面处于领先地位,如XX公司和XX大学合作开
硬件设备
使用高性能的伺服电机和 传感器,确保机器人的稳 定性和精确性。
软件算法
采用先进的控制算法和优 化算法,实现机器人的稳 定行走和自主导航。
实验结果与分析
稳定性
01
通过实验验证,双足机器人在复杂路况下能够保持稳定的行走
姿态,无明显晃动或失步现象。
适应性
02
机器人能够适应不同地形和路况,包括崎岖不平的地面、楼梯
发的双足机器人能够在崎岖路面上实现稳定行走,但成本较高,难以大
规模应用。
03
发展趋势
机器人技术在特殊救援中的应用

机器人技术在特殊救援中的应用近年来,随着科技的日新月异,各种高端技术的应用也随之逐渐普及。
其中,机器人技术逐渐成为近年来科技领域研究的热门方向。
机器人的出现,不仅能代替人类完成一些传统的劳动,还能在特殊领域中提供更加高效的服务。
在特殊救援领域,机器人技术的应用也引起了人们的广泛关注。
一、机器人应用于消防救援中对于消防员来说,每次救援任务都是一次殊死的挑战。
基于这种情况,许多消防机构自2017年以来,开始引进机器人参与救援行动。
消防机构所使用的机器人类型多种多样,如无人机、轨道车、爬墙机器人等。
它们原本作为辅助工具,如今却成为了走在前沿的领袖。
爬墙机器人是一种常见的机器人类型,它能够在高空和狭小的空间内提供救援。
在火灾中,火势瞬息万变,出现火场结霜水,消防员很难直接进入。
而爬墙机器人在这时就能派上用场。
它们可以实现对交通壳体的内部进行探查,寻找困难区域,分析烟雾成分和温度。
消防人员可以通过机器人提供的数据,了解救援区域的情况。
在最终的救援任务中,消防员可以根据机器人的探测数据,针对性进行救援。
二、机器人应用于地震救援中地震是一种特殊的自然灾害,发生时一般会造成建筑物的倒塌,地基破裂等状况。
在此次事件中,救援人员需要对地震区域进行全面的探查,收集相关信息,避免不必要的死亡和伤害。
此时,机器人也能派上用场。
地震救援机器人,可以被用于探测建筑物内部的状况,包括墙体坚固性、金属构造、墙体厚度等。
通过机器人的数据,救援人员可以更准确地判断救援地点内部状况,并采取合适的救援方式,以提高救援的成功率。
机器人还能被用于探测救援人员的队伍状况。
在灾难中,救援人员可能会迷路,因此迅速找到他们就显得尤为重要。
直至2018年,美国的非营利组织铁麦克向联邦紧急情况管理局提交了救援机器人的最新项目,也就是需要探测灾难现场的机器人。
这种机器人需要获得许多现场情况和地形图像,最终能够在短时间内找到消失的人和队伍,并向消防队员提供他们的位置。
两足行走机器人
两足行走机器人随着科技的不断进步,机器人的应用范围越来越广泛。
其中一种被广泛研究的机器人类型就是两足行走机器人。
这种机器人模仿人类的行走方式,具备了在复杂环境中自主行走的能力,因此在军事、工业、医疗等领域有着广泛的应用前景。
本文将介绍两足行走机器人的原理、应用及相关挑战。
一、两足行走机器人的原理两足行走机器人的行走原理是模仿人类的步态。
为了实现稳定的行走,两足行走机器人通常配备了多个传感器、控制系统和执行器。
传感器用于感知周围环境和机器人自身的状态,如陀螺仪、加速度计和力传感器等。
控制系统利用传感器的反馈信息进行实时控制,以保持机器人的平衡和稳定。
执行器负责驱动机器人的关节和肌肉,实现腿部的运动。
由于两足行走机器人需要保持平衡,因此控制算法起着重要的作用。
常见的控制算法包括PID控制和模型预测控制。
PID控制是一种基于误差的反馈控制算法,通过调节参数来控制机器人的姿态和速度。
模型预测控制则是基于机器人的动力学模型,通过优化问题求解来生成最优的控制指令。
这些控制算法能够帮助机器人实现平稳的行走,并适应各种地形和环境。
二、两足行走机器人的应用两足行走机器人在军事、工业、医疗等领域有着广泛的应用前景。
1. 军事应用两足行走机器人在军事领域可以执行危险任务,如侦察、搜救和排爆等。
相比于传统的轮式机器人,两足行走机器人能够更好地适应不规则的地形,提高机动性和灵活性。
同时,机器人可以搭载各种传感器和武器装备,增强军队的作战能力。
2. 工业应用两足行走机器人在工业领域可以用于物流、装配和维修等任务。
机器人可以在工厂中自主导航,搬运货物和完成装配操作,提高生产效率和质量。
此外,机器人还可以监测和维修设备,降低人力成本和安全风险。
3. 医疗应用两足行走机器人在医疗领域可以应用于康复训练和护理服务。
机器人可以帮助康复患者进行步态训练,恢复行走能力。
同时,机器人还可以提供护理服务,如搬运病人、送药等,减轻医护人员的劳动强度。
救援机器人控制系统的设计毕业设计

摘要近年来,由于环境恶化导致的自然灾害以及战争导致的人为灾害经常发生。
在灾难发生后的48小时以内,是在受灾现场废墟中寻找幸存者的黄金时间。
灾难救援现场环境往往是异常复杂、危险、多变,救援行动刻不容缓,在此种环境下,采用救援机器人协同救援人员,进行救援行动,能起到事半功倍的作用。
结合救灾场所的非结构化环境,本毕业设计设计了一款救援使用的探测机器人.机器人采用通用开放式机器人系统,采用模块化设计。
机器人系统的性能和功能可以根据救灾环境的需要很方便的增减。
良好的无线通讯功能允许远程操作。
在演示控制界面可以用单片机语言控制机器人移动状况。
控制系统结构流程:计算机发出信号经过电平转换到无线收发模块,之后通过无线通讯到无线接收模块,通过单片机处理以及数据锁存最终控制机器人。
调速系统硬件原理是以AT89S51单片机为控制核心。
救援机器人采用了多种传感器共同作用,以便更加精确的获得探测结果,包括使用3CCD 感光器获得图像信息、使用超声红外传感器精确确定探测目标的位置。
采用履带式行走机构,履带具有较强的驱动力,可以在阶梯上移动、重心低而稳定。
救援机器人具有可靠的机械系统和智能化的控制系统,可以在救灾现场恶劣的自然环境下工作。
矚慫润厲钐瘗睞枥庑赖。
关键词:救援机器人;控制系统;传感器;模块化设计;开放式机器人;AbstractIn recent years,due to the natural disasters caused by environmental degradation and man-made disasters caused by the war happened veryoften.Disaster rescue site environment is often complicated,dangerous, changeable,so it is urgent to rescue.In this environment,adopt the rescue robot coordinated rescue workers to carry on the rescue operation,can have the effect of get twice the result with half the effort.聞創沟燴鐺險爱氇谴净。
北京理工大学-新型轮腿式机器人

新型轮腿式机器人*刘祎玮 牛锴 吴帆 梁冠豪 王禛(北京理工大学机电学院,北京100081,中国)摘要:设计与研制了一种新型小尺寸、轻体重、多用途的轮腿式机器人。
该机器人集中了腿式机器人地形适应性强和轮式机器人机动速度高的优点,可在复杂地形条件下以多种行进步态和多种运动方式完成特殊的机动任务。
在对该机器人功能特点和运动要求进行详尽分析的基础上,结合抽象仿生学的原理,阐述了仿生步态的实现方法,开发了上位机人机交互系统和基于ARM 的嵌入式运动控制系统,探索了多轴伺服运动控制技术,在控制、反馈各环节之间以及机器人视觉系统中采用了无线数据通信方式,实现了机器人的远程遥控,并辅助以超声波探测器阵列,以多传感器信息融合技术配以实时避障算法和数字图像处理技术实现了机器人的自主运动及探测,使该机器人真正成为高技术的综合体,能够完成多种特殊使命。
仿真分析和原理样机实测表明,该机器人具有良好的越野行驶能力和稳定可靠的探测性能。
关键词:轮腿式机器人,运动步态,嵌入式控制系统,自主探测,人机交互 中图分类号:TP242 文献标示码:A*基金项目:教育部“国家大学生创新性实验计划”资助作者简介:刘祎玮(1988-),男,本科生,主要从事机器人学研究。
0引言相比传统的移动机器人,轮腿式机器人具有更强的地形适应性,这是因为其每条腿能实现不同的动作,因而可以依靠腿的协调动作来保持机身平稳从而适应复杂地形,此外轮式结构的设计保证该机器人在松软、崎岖的地面上能以较高速度运动。
迄今为止,欧美等国已陆续研制出一系列具有昆虫运动特点的仿生机器人,其典型代表有:美国Case Western Reserve University 研制的Robot Ⅲ、Robot Ⅳ,美国University of Michigan 、UC Berkeley 和加拿大McGILL University 共同研制的RHex 仿生蟑螂机器人。
这些仿生机器人控制系统设计冗繁且控制性能不稳定,环境适应度较低,续航能力不强等各种劣势,只能在实验室环境中短时运行。
仿人双足机器人多地形步态规划和稳定控制方法
卡尔曼滤波器是一种适合用于估计状态变量 的线性二次高斯系统的最优估计算法。该策 略使用卡尔曼滤波器来估计机器人的姿态、 速度和位置等状态变量,并根据估计结果来 调整机器人的脚底力和重心位置,以保持机 器人的稳定行走。此外,该策略还可以通过 实时更新环境参数来适应不同的地形和环境
条件。
基于模糊逻辑的稳定控制策略
实验结果
分析实验结果,包括机器 人在不同地形上的稳定性 表现和控制效果。
06
结论与展望
研究成果总结
已实现仿人双足机器人在不同地形下的稳定行走
通过采用先进的步态规划和稳定控制算法,机器人能够在沙滩、草地、碎石路等复杂地形 下实现稳定行走。
提高了机器人的适应性和灵活性
通过优化步态规划和控制算法,机器人能够适应不同的地形和环境变化,并保持稳定的行 走性能。
基于矢状面的步态规划方法
基于矢状面的步态规划方法是一种经典的步态规划方法,它将机器人的 腿部运动分为矢状面上的前后运动和水平面上的左右运动两个部分,分 别进行规划。
该方法通常将机器人的腿部在矢状面上的运动表示为正弦或余弦函数, 而在水平面上的运动则表示为多项式函数。通过调整这些函数的参数,
可以控制机器人在行走过程中的步长、步频、步高等参数。
动性。
03
动态地形
这种地形可能会随着时间变化而变化,例如,机器人需要在行走过程
中避开移动的物体或者在行走过程中跨越障碍物。在这种地形上,机
器人需要能够实现动态的步态调整和稳定控制。
基于机器学习的地形分类与步态规划
利用机器学习算法对不同的地形进行分类
通过机器学习算法对大量的地形数据进行训练和学习,可以实现对不同地形的准确分类。
ห้องสมุดไป่ตู้
消防机器人在灭火救援实战中存在的问题及对策

汇报人:
日期:
CATALOGUE
目 录
• 消防机器人简介及在灭火救援中 的应用
• 消防机器人在灭火救援实战中存 在的问题
• 针对存在问题的对策和建议 • 未来展望
01
CATALOGUE
消防机器人简介及在灭火救援 中的应用
消防机器人定义及分类
定义
消防机器人是一种特种机器人,专门设计用于参与灭火和救援任务,能够替代 或部分替代消防员在危险环境中的工作。
分类
消防机器人可分为陆地消防机器人、水上消防机器人和空中消防机器人等,分 别适应不同环境和任务需求。
消防机器人在灭火救援中的优势
无人化操作
消防机器人能够代替消防员进入高温 、有毒、易燃易爆等危险环境,减少 人员伤亡。
高效灭火
消防机器人配备高压水枪、泡沫灭火 剂等灭火设备,能够快速有效地扑灭 火源。
24小时不间断工作
消防机器人不受体力限制,可实现 24小时不间断工作,提高灭火效率 。
精准定位与导航
通过先进的定位导航技术,消防机器 人能够准确到达火场,提高灭火成功 率。
消防机器人在实战中的现状
01
02
03
04
05
应用范围有限:目前消 防机器人的应用范围主 要集中在大型火场、化 学品泄漏等高危环境, 对于一般火灾事故,消 防机器人的应用尚不普 及。
感知能力有限
消防机器人的感知能力受到传感器 技术和计算机视觉技术的限制,无 法像人类一样感知和处理复杂的火 灾场景。
自主性不足
目前的消防机器人大多需要人类远 程操控,缺乏自主性,无法完全适 应变幻莫测的火灾环境。
操作层面存在的问题
火灾救援机器人调研报告总结

火灾救援机器人调研报告总结背景介绍:近年来,火灾频发且每次都造成巨大的财产损失和生命伤亡,对于提高火灾救援效率和降低风险,研发火灾救援机器人作为一种创新的解决方案备受关注。
本次调研旨在分析现有的火灾救援机器人技术以及其应用情况,并总结其优势和不足之处。
一、火灾救援机器人技术概述1.无人驾驶技术无人驾驶技术是现代机器人技术的核心,实现了自主导航和避障能力,使得机器人可以在火场中自由移动。
通过先进的传感器系统和算法支持,无人驾驶技术能够精确控制火灾救援机器人的运动轨迹以及应对突发情况。
2.环境感知与勘查面对复杂多变的火场环境,火灾救援机器人需要具备强大的环境感知与勘查能力。
目前,许多先进的传感器被广泛应用于火灾救援机器人中,如红外热像仪、气体传感器、摄像头等。
这些传感器能够实时监测火场温度、有毒气体浓度和风向等重要参数,及时提供可靠的环境信息。
3.火场搜救和救援操作火场搜救是火灾救援机器人的核心任务之一。
现阶段最常见的机器人应用包括自动寻找幸存者并与其建立通信连接,将实时视频图像传输到指挥中心,为消防员提供详细的火场情报,并协助进行物资运送以及营救行动。
二、火灾救援机器人应用案例分析1.各国实践案例分享许多国家在火灾救援机器人领域展开了积极的研发,并取得了一定成果。
美国的“大疱虫”(BigDog)是一个四足行走机器人,具备良好的地形适应性;日本研发了名为“水蜘蛛”(AquaSpider)的水下消防机器人,在海上油污泄漏事故中发挥了重要作用;法国推出了“小车163X”(Coyote)机器人,可以在狭窄环境中进行火场探测和搜救。
2.火灾救援机器人在实践中的效果评估通过对多个国家的案例分析,我们可以看出火灾救援机器人在实践中取得了显著效果。
首先,机器人具备自主导航能力,能够高效地到达指定位置,减少了人员风险。
其次,传感器系统的应用使得机器人能够及时检测环境参数,并将数据传回指挥中心,在决策制定过程中提供重要参考。
力升高科耐高温消防机器人产品系列手册说明书

让生命不再冒险力升高科耐高温消防机器人产品系列让生命不再冒险0102证书 / CERTIFICATE企业营业执照国家高新技术企业中关村高新技术企业中关村金种子企业中国消防协会会员北京消防协会单位会员资信证书甘肃省建筑业联合会直属会员单位2019中国国际消防设备技术交流展览会创新产品2021中国国际消防设备技术交流展览会创新产品应急科技先进装备证书北京市新技术新产品证书兰州科技成果博览会优秀产品金奖第十届中国消防协会科学技术创新奖▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎▎全球智能应急装备大赛应急救援机器人赛道大奖第二十三届中国国际高新技术成果交易会优秀产品奖2021年度中国消防行业应急救援领军品牌北京物联网智能技术应用协会会员单位新型基础设施建设产品与服务认定证书ISO质量体系认证ISO环境体系认证ISO职业健康安全认证AAA级企业资信等级证书AAA级质量服务诚信企业AAA级诚信经营示范单位企业信用等级证书诚信供应商企业荣誉资质力升高科多年以来重视产品的创新从研发到生产由资深技术人员一道道把关根据市场变动趋势,推出符合市场需求的高标准产品在不断的努力下,我们获得了多方面认可这些都已成为力升高科登上更高目标的阶梯 03专利证书让生命不再冒险0405划时代的创新技术技术创新力升高科历经四年潜心研发,推出1000℃耐高温消防机器人系列产品,突破以往消防装备的作战区域限制,不仅能在火场外围常温区域作业,还能进入火场核心高温危险区域,具有全范围能攻善守的作战能力,针对火场高温燃烧区域的火情侦察、灭火降温、保护人员等作战任务具有四个“零距离”优势,扩展了救援人员的作战能力,保障消防战士人身安全,让生命不再冒险。
耐高温防护技术基于瞬态传热仿真及大量实验分析优化的多层变组分隔热瓦,针对性分区域传热抑制设计,有效抑制外部 热辐射、热传导及层间热辐射。
拓扑优化网格支撑复合壳体结构,轻量化、抗蠕变。
高性能防水柔性密封系统。
机器人在火灾疏散时的作用

机器人在火灾疏散时的作用随着科技的不断发展,人工智能逐渐成为人们生活中的一部分。
机器人作为其中的一种载体,不仅在工业生产中有广泛的应用,而且在紧急救援、安全管理等领域也日益受到关注。
在火灾疏散中,机器人的作用尤为突出,可以有效地提高人们的生命安全和财产安全。
本文将论述机器人在火灾疏散时的作用及其应用前景。
一、机器人在火灾疏散中的作用机器人在火灾疏散中的作用主要体现在以下几个方面:1.提前预警机器人可以提前发现火灾的部位和程度,通过传感器检测空气中的氧气含量、烟雾浓度、温度等指标,将数据传输至控制中心。
控制中心通过数据分析和处理,及时预警,向灾区内部和外部的相关人员发送警报和信息,使人们有更多的时间和机会进行有效的疏散。
2.搜救被困人员在火灾发生时,机器人可以对火源进行准确定位,快速找到被困人员的位置和情况。
机器人可以携带聚光灯、红外线热像仪、摄像头等设备,以全方位、多视角来搜寻被困人员。
机器人还可以通过透过烟雾或者裂缝救援被困人员,从而尽快消除被困人员的危险,增加救援成功的可能性。
3.指引疏散路线在火灾疏散中,机器人可以担任路线和位置指引的角色。
机器人可以预设多条疏散路线,以适应灾情的变化和疏散人员的不同需求。
机器人可以在指引疏散人员时,主动作出应变性指引,遇到疏散人员困难或者拥挤时,自动改变指引路线以及疏散方案,以尽快实现人员转移。
4.搬运物品和设备当火灾发生时,人们通常要带上日常用品和现场必备工具等,但这些物品有时候会很沉重。
机器人可以协助人们搬运这些负重物品,使人们的疏散更快速、平稳。
最重要的是,机器人还可以帮助搬运灭火器和其他救援设备,促进消防力量的快速响应和实施打火救援。
二、机器人在火灾疏散中的应用前景机器人在火灾疏散中所表现出来的作用和优点,得到了广泛的认可和探索。
未来,机器人在火灾疏散领域还具有以下发展前景:1.智能化未来的机器人将从传感器信号的收集、传递完善到实现全自主定位及行动。
机器人在救援行动中的应用案例

机器人在救援行动中的应用案例机器人技术的不断发展为各行各业带来了巨大的改变,其中之一就是在救援行动中的应用。
机器人的高效、准确和耐力使其成为救援人员的得力助手,为各类灾难救援提供了有效的支持。
本文将介绍几个机器人在救援行动中的应用案例,展示了机器人技术对救援工作的重要作用。
案例一:火灾救援火灾是一场极具危险性的灾难,传统的人工救火方式可能存在较高的风险。
而机器人在火灾救援中的应用则能有效减少人员伤亡风险。
比如,空中消防机器人能够通过搭载高清摄像头和红外热成像仪等装置,实时监测火场情况并发送给指挥中心。
此外,机器人还可以承担携带灭火器材和喷水器等任务,迅速灭火并将火源控制在较小范围。
案例二:地震救援地震是另一种常见的灾难,其造成的人员被困和建筑倒塌等问题需要及时解决。
机器人在地震救援中可以扮演多个角色。
例如,机器人可以携带探测设备,深入倒塌建筑内部,寻找被困人员。
机器人还可以通过无人机和探测车辆等形式进行快速勘探,为救援队提供准确的信息,指导救援行动。
案例三:水下救援水下环境的特殊性使得传统的救援方式难以发挥应有的效果,而机器人在水下救援中表现出了独特的优势。
水下机器人可以深入水下,进行搜寻、打捞和救援任务。
例如,在海难事故中,水下机器人能够对沉船进行勘测,并通过机械手臂携带搜救设备对受困人员进行救援。
案例四:自然灾害救助自然灾害如洪水、泥石流等常常造成人员伤亡和财产损失。
机器人在自然灾害救助中能够克服传统救援方式的困难。
例如,在洪水期间,水面机器人能够携带物资,为被困人员提供生活必需品。
无人机则能通过空中勘测,提供灾区的实时信息,协助救援队制定救援策略。
总结:机器人在救援行动中的应用案例有着广泛的领域,涵盖了火灾救援、地震救援、水下救援和自然灾害救助等多个方面。
机器人的高效性、精确性和耐力为救援行动提供了可靠的支持。
随着机器人技术的不断进步,相信机器人在救援工作中的应用将会不断拓展,为保护人类生命和财产安全作出更大的贡献。
变电站智能消防机器人专用技术规范书

变电站消防灭火机器人系统专用技术规范2019年12月目录1总则 (1)2技术要求和性能参数 (1)2.1基本要求 (1)2.2功能要求 (1)2.2.1消防作业功能 (1)2.2.2信息采集功能 (2)2.2.3自保护功能 (2)2.2.4通信功能 (2)2.2.5机器人自检功能 (2)2.2.6声光报警功能 (2)2.3技术要求 (2)2.3.1结构和外观要求 (2)2.3.2灭火性能 (3)2.3.3运动性能要求 (3)2.3.4性能要求 (3)2.3.5机器人室要求 (4)3检测报告要求 (4)3.1出厂试验 (4)3.2验收检验 (4)4培训 (5)5其他要求 (5)6变电站消防灭火机器人材料清单 (5)7附表1 变电站消防灭火机器人本体技术指标与响应表 (6)1总则本规范书规定了变电站消防装备的组成、技术要求、安全要求、技术依据及质保、包装、安装和调试要求。
本规范书适用于变电站消防灭火机器人。
变电站消防灭火机器人集成最新的机电一体化和信息化技术,工业化设计,采用控制箱,远程控制方式,替代人对变电站火灾进行处置,其通过多种传感器完成对变电站环境温湿度及气体浓度测量等功能;通过搭载的高压水炮灭火系统对变电站火灾进行扑救。
变电站消防机器人应满足变电站安全运行要求,其通信方式、供电电源、运行环境应满足国家电网相关技术要求。
2技术要求和性能参数2.1基本要求2.1.1变电站消防灭火机器人装备应至少配置消防灭火机器人本体以及其它辅助设施。
同时提供5年质保和免费维护升级服务。
2.1.2变电站消防机器人所有部件应能承受贮存、运输和工作条件下所规定的各种环境条件,包括:气候、力学、生物、电磁环境等。
2.1.3变电站消防机器人按现行的国家标准、行业标准选用材料。
当选用标准以外的材料时,应经过鉴定证明其性能满足设计要求,方可选用。
材料的选用应考虑到维修中的互换、备料和代料。
机器人内部板件走线应规范整齐。
变电站消防机器人的标准件应按照国家标准、行业标准选用标准件。
机器人试题库带答案

机器人题库〔带答案〕1.abb机器人属于哪个国家?〔C 〕A.美国B中国C瑞典D日本2.机器人控制柜发生火灾, 用何种灭火方式适宜?〔B 〕A.浇水B二氧化碳灭火器C泡沫灭火器D毛毯扑打3.在何处找到机器人的序列号?〔B 〕A控制柜名牌B示教器C操作面板D驱动板4.abb机器人的额定电压是多少?DA 24vB 36vC 110v D380v5.安川机器人属于哪个国家?〔A 〕A日本C挪威C俄罗斯D 美国6.abb可以允许有几个主程序main 〔A 〕A一B二 C 三D四7.在哪个窗口可以改变操作时的工具〔B 〕A程序编辑器B手动操作C输入输出D其它窗口8.哪条指令用来等待数字输入信号〔A 〕A WaitDiB WaitDoC DiWaitD WaitTime9.准确到达工作点用那个zone 〔D 〕A z1B z50C z100 DFine10.哪个zone可获得最圆滑路径〔D 〕A z1B Z5 Cz10 D z10011.哪个指令可最方便回到六轴的校准位置?〔C〕AMoveL BMoveJ CMoveAbsJ DArcL12.机器人速度是那个单位〔C〕?A /min B.in/min C.mm/sec D.in/sec13.哪条指令将数字输出信号置1 〔C 〕A SetB ResetC SetAOD PulseDo14.用何功能保存模块〔B〕A 程序另存为B另存模块为C另存工具为D系统另存为15.在哪个窗口可以定义机器人输入输出〔C 〕A 程序编辑器B 手动操作C 输入输出D 控制面板16.在哪个窗口可以标定机器人的零位〔C 〕A程序编辑器 B 手动操作 C 校准 D 控制面板17.在哪个窗口可以看到故障信息〔C 〕A 程序数据B 控制面板C 事件日志D 系统信息18.在急停解除后, 在何处复位可以使电机上电〔A 〕A控制柜白色按钮 B 示教器 C 控制柜部 D 机器人本体19.机器人手动操作时, 示教使能器要一直按住〔√〕20机器人四大家族是发那科, 安川电机, abb , 酷卡〔√〕21机器人工作时, 工作围可以站人〔X 〕22机器人不用定期保养〔X 〕23机器人可以做搬运, 焊接, 打磨等工程〔√〕24机器人可以有六轴以上〔√〕25程序模块只能有一个〔X 〕26对机器人进展示教时.作为示教人员必须事先承受过专门的培训才行.与示教作业人员一起进展作业的监护人员.处在机器人可动围外时,〔B〕, 可进展共同作业。
灭火机器人结构与控制设计

灭火机器人结构与控制设计灭火机器人的结构设计主要包括机器人底盘、机械臂、传感器和灭火装置等部分。
底盘是机器人的基础,负责机器人的移动和平衡控制。
通常采用轮式底盘,具备足够的稳定性和机动性,可以在复杂的火灾现场进行灵活移动。
机械臂是机器人的“手臂”,用于操作灭火装置、搜救受困人员等任务。
传感器是机器人的“感知器官”,用于感知火灾现场的温度、气体浓度等信息,提供给控制系统做出智能决策。
灭火装置是机器人的关键部分,通常采用液态或气态灭火剂进行灭火,具备灭火效果好、灭火范围大的特点。
灭火机器人的控制设计主要包括传感器数据获取与处理、路径规划与导航、灭火装置控制等子系统。
传感器数据获取与处理是指通过传感器获取火灾现场的温度、气体浓度等信息,并进行数据处理与融合,提供给控制系统做出决策。
路径规划与导航是指通过路径规划算法确定机器人的移动路径,并通过导航控制机器人沿着规划好的路径移动到指定位置。
灭火装置控制是指根据火灾现场的实际情况,控制灭火装置的开启、关闭等操作,实现灭火任务的完成。
灭火机器人的控制系统通常采用分层结构,在不同层次上实现控制的任务。
最底层是底盘控制模块,负责底盘的运动控制和平衡控制,通过电机控制系统实现机器人的前进、后退、转弯等动作。
中层是机械臂控制模块,负责机械臂的运动控制和灭火装置的操作控制,通过电机控制系统实现机械臂的伸缩、旋转等动作。
最上层是智能控制模块,负责传感器数据的处理与决策,通过算法实现路径规划、导航和灭火装置的开启、关闭等操作。
灭火机器人的控制算法是实现自主控制的关键。
路径规划算法可以通过地图信息和传感器数据计算出机器人的最优路径,提高机器人的行动效率。
导航算法可以根据机器人的运动状态和传感器数据实现精确的导航控制,使机器人能够准确地达到指定位置。
灭火装置控制算法可以根据火灾现场的温度、气体浓度等信息,实时调整灭火装置的开启、关闭等操作,保证灭火效果和安全性。
综上所述,灭火机器人的结构设计和控制设计是灭火机器人性能和效果的关键。
特种机器人分类

特种机器人分类特种机器人是指根据不同的应用场景和功能需求,设计制造出来的一种具有特殊功能和性能的机器人。
它们可以在危险、恶劣、高风险或无法到达的环境中执行任务,如火灾救援、核辐射清理、海洋勘探等。
根据其应用场景和功能需求,特种机器人可以分为以下几类:一、消防救援机器人消防救援机器人是一种用于火灾救援的特种机器人。
它们可以在火场中执行任务,如搜索失踪人员、喷洒灭火剂等。
消防救援机器人通常具有以下特点:1. 能够耐高温:消防救援机器人需要能够承受高温环境,以便在火场中执行任务。
2. 具有灵活性:消防救援机器人需要具有足够的灵活性,以便在狭窄的空间中进行操作。
3. 具有携带能力:消防救援机器人需要能够携带各种工具和设备,以便执行任务。
二、军事作战机器人军事作战机器人是一种用于军事作战的特种机器人。
它们可以在战场上执行任务,如侦察、炮击、搬运物资等。
军事作战机器人通常具有以下特点:1. 具有自主性:军事作战机器人需要能够自主完成任务,而不需要人类干预。
2. 具有隐蔽性:军事作战机器人需要具有足够的隐蔽性,以便在敌方监视下完成任务。
3. 具有攻击能力:军事作战机器人需要能够攻击敌方目标,以保障我方安全。
三、医疗护理机器人医疗护理机器人是一种用于医疗护理的特种机器人。
它们可以在医院中执行任务,如输液、测量生命体征等。
医疗护理机器人通常具有以下特点:1. 具有精准度:医疗护理机器人需要具有足够的精准度,以确保治疗效果。
2. 具有安全性:医疗护理机器人需要具有足够的安全性,以避免对患者造成伤害。
3. 具有人性化:医疗护理机器人需要具有足够的人性化,以便与患者进行良好的交互。
四、海洋勘探机器人海洋勘探机器人是一种用于海洋勘探的特种机器人。
它们可以在海底执行任务,如勘探油气资源、收集环境数据等。
海洋勘探机器人通常具有以下特点:1. 具有耐压性:海洋勘探机器人需要能够承受高压环境,以便在深海中执行任务。
2. 具有耐腐蚀性:海洋勘探机器人需要能够承受海水的腐蚀,以延长使用寿命。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新型灭火机器人:两足行走可穿复杂地形
这种机器人设计的长远目标是使其能够提供帮助,让海上的船员们远离火灾的危险。
这种机器人设计的长远目标是使其能够提供帮助,让海上的船员们远离火灾的危险。
新浪科技讯北京时间2月7日消息,据英国《每日邮报》报道,美国海军正在开发一款新型灭火机器人。
这款机器人身高约5英尺10英寸(约合1.778米),重约143磅(约合129.7斤),未来不久,它或许就将加入美国海军序列并在舰船上服役。
近日在华盛顿举行的“海军未来军备科学与技术展”上,这款机器人对外作了展示。
在模拟的火灾场景中,这款机器人展示了穿越复杂地形,借助热成像技术识别过热设备并使用软管浇灭小型火灾的能力。
托马斯·麦克坎纳(Thomas McKenna)博士是美国海军研究办公室(ONR)下属“类人机器人互动与识别神经科学项目组”的主管。
他说:“我们在这里展示一种类人机器人,其可以在船舶上运动,操作开关门或使用水管并借助感受器的帮助在浓烟中搜寻和导航。
这种机器人设计的长远目标是使其能够提供帮助,让海上的船员们远离火灾的危险。
”
这种先进的机器人是由弗吉尼亚理工学院研发的,是一种具有两足的类人型机器人。
其正式的名称是“船舶自动灭火机器人”(SAFFiR)。
其独特的机械结构设计使其具备超人的运动能力,能够在复杂空间环境下展开快速行动。
布莱恩·莱特密尔(Brian Lattimer)是弗吉尼亚理工学院机械工程学助理教授,他说:“要想在任何不平整的地面上平稳站立,尤其是依靠两足站立,都是非常困难的。
整体动量控制让这款机器人得以优化其所有关节的位置,从而使其能够在不确定或不平稳的地面上保持重心稳定。
”
其身上安装的多种感受器,包括红外立体视野以及可旋转的激光探测和测距系统(LIDAR),使得这款机器人可以在浓烟中行动自如。
另外它还经过专门设计,可以抵达指定的位置并自行使用水管。
但在目前阶段这款机器人还必须依靠研制人员从计算机控制台发送全部指令。
莱特密尔表示:“这款机器人可以自动执行任务,但我们会安排操作员待命,随时准备介入机器人正在执行的任何任务。
”
麦克坎纳还在计划资助一项更加先进的机器人设计方案,作为其长期研究资助计划的一部分。
大致的蓝图包括为机器人升级经过强化的智能,通讯能力,速度,计算机能力以及电池续航能力等等。
他表示:“我们已经对其他一些可能可以安装到机器人身上的感受器进行了考察。
”“举例而言,一名两足机器人可以进行船舶测量,探查是否存在腐蚀和泄露现象,并根据原始布局图判断船舱的形状是否发生了改变。
通过承担这些耗费时间的任务,SAFFiR可以将船员从这些繁重的工作中解放出来,从而可以更好地投入他们的训练和技术工作中去。
”
然而即便经过升级后的智能系统,SAFFiR机器人仍然智能从海员和防火控制员那里远程接受指令,并在发生火灾或其他危险事项时开展工作。
麦克坎纳表示:“我们正在朝着建成‘人类-
机器人协同团队’的方向努力。
我们将这称作‘混合力量’,那就是人和机器人之间的紧密合作。
”。