MATLAB与工程应用 第7章 动力学与振动
振动力学基础与matlab应用_概述说明

振动力学基础与matlab应用概述说明引言是一篇文章的开篇部分,用于介绍文章的背景、目的和结构。
在本文中,引言部分将包括概述、文章结构以及研究目的。
1.1 概述振动力学作为工程领域的一个重要分支,研究物体在受到外界激励时发生的振动现象。
振动力学的理论与应用在许多工程领域都有广泛应用,包括结构工程、机械工程、航空航天等。
了解振动力学的基础知识和掌握相应的计算工具是进行相关工程设计和问题分析的必要前提。
1.2 文章结构本文将按照以下方式组织:第二部分将介绍振动力学的基础知识。
我们将阐述振动概念,并详细讨论振动模型及其方程。
此外,还将重点介绍自由振动与强迫振动之间的区别以及其在实际问题中的应用。
第三部分将探讨Matlab在振动力学中的应用。
我们将回顾Matlab基础知识,并简要介绍Matlab中常用的振动计算工具箱。
通过案例分析与实践应用,我们将展示如何利用Matlab解决振动力学中的实际问题。
第四部分将重点讨论典型振动问题及其解决方法。
我们将介绍频率响应分析与谱密度法在振动工程中的研究应用,以及模态分析与阻尼系统优化设计方法的论述。
此外,本文还将给出数值仿真模拟在振动工程中的应用示例讲解。
最后,我们将在第五部分总结本文所得结果,并讨论研究的局限性。
同时,对未来研究方向进行了展望。
1.3 目的本文旨在提供一个关于振动力学基础和Matlab应用的概述说明。
通过深入了解振动力学理论和掌握相关计算工具,读者可以更好地理解和解决振动问题。
同时,本文还旨在为未来相关研究提供参考和启发,促进该领域的进一步发展与探索。
通过本篇文章,“振动力学基础与Matlab应用”的概述说明已经清晰地介绍了引言部分内容,并包含了概述、文章结构以及研究目的等方面的信息。
2. 振动力学基础:2.1 振动概念介绍振动是物体在时间和空间上的周期性运动。
它是一种重要的物理现象,在工程领域中有广泛的应用。
振动可以分为自由振动和强迫振动两种类型。
matlab 系统动力学模型

matlab 系统动力学模型Matlab 系统动力学模型引言:系统动力学是研究动态系统行为的数学方法,通过描述和分析系统在时间上的演化过程,揭示系统内部的关系和相互作用规律。
Matlab是一种强大的数值计算软件,广泛应用于系统动力学模型的建立和仿真。
本文将介绍Matlab在系统动力学建模中的应用,并结合实例进行说明。
一、系统动力学基本概念系统动力学是一种描述系统行为的数学工具,它将系统划分为不同的部分,并研究它们之间的相互作用。
系统动力学模型通常由一组关于系统部分之间关系的微分方程或差分方程组成。
在建立模型时,需要考虑系统的输入、输出以及系统内部的状态变量,并通过数学表达式描述它们之间的关系。
二、Matlab在系统动力学模型中的应用Matlab提供了丰富的数学函数和工具箱,使得系统动力学模型的建立和仿真变得更加简单和高效。
下面将以一个简单的例子来说明Matlab在系统动力学建模中的应用。
假设有一个简单的机械系统,由弹簧和质量构成。
假设弹簧的刚度为k,质量为m,阻尼系数为b。
我们想要建立一个系统动力学模型,来描述质点的运动过程。
我们需要确定系统的状态变量和输入输出。
在这个例子中,质点的位移x是系统的状态变量,外力F是系统的输入,质点的加速度a 是系统的输出。
根据牛顿第二定律,我们可以建立如下的微分方程:m * a = F - b * v - k * x其中,v是质点的速度。
为了建立系统的动力学模型,我们需要对该微分方程进行求解。
在Matlab中,可以使用ode45函数来解决常微分方程。
具体的Matlab代码如下:```matlabfunction dxdt = system_dynamics(t, x)m = 1;k = 10;b = 0.5;F = 5;v = x(2);a = (F -b * v - k * x(1)) / m;dxdt = [v; a];end[t, x] = ode45(@system_dynamics, [0, 10], [0, 0]);plot(t, x(:, 1));xlabel('Time');ylabel('Displacement');title('System Dynamics');```在上述代码中,system_dynamics函数定义了系统的微分方程,其中包括质点的加速度和速度的计算。
MATLAB中的动力学建模和仿真

MATLAB中的动力学建模和仿真动力学是研究物体运动原因和规律的一门学科。
当我们需要研究物体受力、速度和加速度等变化情况时,动力学便发挥了重要作用。
而在工程领域,动力学建模和仿真更是常用的工具。
本文将探讨在MATLAB中进行动力学建模和仿真的方法和技巧,旨在帮助读者更好地理解和应用这一领域的知识。
一、MATLAB中的动力学建模动力学建模是指将物体的受力、速度和加速度等因素转化为数学模型,以便用计算机进行仿真和分析。
MATLAB作为一种强大的计算软件,提供了丰富的工具和函数,使得动力学建模变得更加简便和高效。
1.1 数学模型的建立在进行动力学建模之前,首先需要确定物体的运动方程和力学模型。
以一维运动为例,物体的运动方程可以用牛顿第二定律来表示:力等于质量乘以加速度。
根据这个基本原理,我们可以通过编写MATLAB代码来建立数学模型。
首先,需要定义物体的质量、初始位置和速度等参数。
然后,根据牛顿第二定律,可以写出物体的运动方程。
最后,使用MATLAB的符号计算工具箱,将这个方程转化为MATLAB可解的形式。
通过这种方式,我们就建立了一个简单的动力学模型。
1.2 力的建模在动力学建模中,力的建模是至关重要的一步。
力的大小和方向决定了物体的运动状态。
在MATLAB中,我们可以使用向量来表示力,其中向量的大小表示力的大小,方向表示力的方向。
通过输入向量的数值和方向,我们可以模拟物体所受到的各种力,并计算出物体的加速度和速度。
在模型中,可以考虑各种类型的力,如重力、弹性力和摩擦力等。
通过将这些力组合起来,并运用牛顿第二定律,我们可以计算出物体的运动状态,并进行仿真和分析。
二、MATLAB中的动力学仿真动力学仿真是指使用计算机模拟物体的实际运动过程,以便更好地理解和分析物体的动力学特性。
在MATLAB中,我们可以利用Simulink软件来进行动力学仿真。
2.1 Simulink概述Simulink是MATLAB的一个重要的工具包,用于进行动力学仿真和系统建模。
MATLAB在力学机械中的应用举例(课件PPT)
wx=diff(vx)./dt(1:Ldt-1);wy=diff(vy)./dt(1:Ldt-1); %二次导数
[t(2:Ldt),x(2:Ldt),y(2:Ldt),wx,wy]
%显示数据
10
子程序ex713f
函数程序应另存成一个文件ex713f.m function zprime=ex713f(t,z) global vt vm zprime=[0;0]; % 给出t0之前zprime初值 zprime(1)=-vt-vm*z(1)/sqrt(z(1)^2+z(2)^2); zprime(2)=-vm*z(2)/sqrt(z(1)^2+z(2)^2); %上面两句可换成一个矩阵语句: zprime=-vt*[1;0]-vm*z/sqrt(z(1)^2+z(2)^2);
5
线性数学模型
对杆件1:ΣX=0 Nax + Ncx = 0 ΣY=0 Nay + Ncy - G1 = 0; ΣM=0 Ncy*L1*cos(theta1)-Ncx*L1*sin(theta1)-…
G1*L1/2*cos(theta1)=0; 对杆件2: ΣX=0 Nbx - Ncx = 0; ΣY=0 Nby - Ncy - G2 = 0; ΣM=0 Ncy*L2*cos(theta2)+ …
从而 w3 = L1w1cos(π/2-θ1+θ2)/ (L3cos(θ3-π/2-θ2)) 由杆2两端点a和b的速度沿杆长垂直方向的分量之差,可以求
出杆2的角速度. w2 = (-(L3sin(θ3-π/2-θ2))- L1w1sin(π/2-θ1+θ2))/L2 2. 求运动全过程的角位置,角速度,角加速度曲线,这只有借助 于计算工具才能做到,因为用手工算一个点就不胜其烦, 算 几十个点是很难想象的.而由MATLAB编程调用fzero函数时, 要求给出一个近似猜测值,若连续算几十点,前一个解就可 作为后一个解的猜测值,所以反而带来了方便. 这样,本书将提供两个程序ex714a.m和ex714b.m来表述这两种 方法,它们所要调用的函数程序命名为ex714f.m.
matlab 动力学建模
MATLAB 动力学建模1. 引言动力学建模是一种描述物体运动和行为的数学建模方法。
在工程学和物理学中,动力学建模被广泛应用于设计、控制和优化系统。
MATLAB是一个强大的数值计算软件,可以用于动力学建模和仿真。
本文将介绍MATLAB在动力学建模中的应用。
2. 动力学建模基础动力学建模的基础是牛顿第二定律,即力等于质量乘以加速度。
根据这个定律,可以建立物体的运动方程。
在MATLAB中,可以使用符号计算工具箱来求解运动方程。
例如,考虑一个简单的弹簧振子系统,其中一个质量m通过一个弹簧与墙壁相连。
弹簧的劲度系数为k,质量m的加速度为a,弹簧的位移为x,墙壁的位置为0。
可以建立如下运动方程:m * a = -k * x在MATLAB中,可以使用符号计算工具箱来求解这个方程,并得到系统的运动方程。
3. 动力学建模方法在动力学建模中,有几种常用的方法可以用于建立系统的数学模型。
以下是一些常见的方法:3.1. 基于物理原理的建模基于物理原理的建模是一种常见的动力学建模方法。
这种方法基于系统的物理特性和力学原理,建立系统的数学模型。
例如,对于一个机械系统,可以根据质量、惯性、摩擦等物理特性,建立系统的动力学方程。
3.2. 系统辨识建模系统辨识建模是一种通过实验数据来建立系统模型的方法。
通过对系统进行实验观测,收集系统的输入和输出数据,然后使用系统辨识算法来估计系统的动力学模型。
MATLAB提供了多种系统辨识工具箱,可以用于建立系统的数学模型。
3.3. 仿真建模仿真建模是一种通过数值仿真来建立系统模型的方法。
通过使用数值计算方法和数学模型,可以模拟系统的运动和行为。
MATLAB提供了强大的仿真工具箱,可以用于建立系统的数学模型,并进行仿真研究。
4. MATLAB 动力学建模工具MATLAB提供了多种工具和函数,用于动力学建模和仿真。
以下是一些常用的工具和函数:4.1. 符号计算工具箱符号计算工具箱可以用于求解符号方程和符号运算。
电力系统的MATLABSIMULINK仿真与应用_第7章汇总

第7章 高压电力系统的电力装置仿真 图7-2 串联补偿装置结构
第7章 高压电力系统的电力装置仿真 打开SimPowerSystems库demo子库中的模型文件power_ 3phseriescomp,可以直接得到图7-1的仿真系统如图7-3所示, 以文件名circuit_seriescomp另存,以便于修改。
第7章 高压电力系统的电力装置仿真 图7-15 等效三相电源参数设置
第7章 高压电力系统的电力装置仿真
从SimPowerSystems/Measurements子库中复制“阻抗测 量”模块到本模型文件中,将该模块连接到母线B2的a相和 b相线路上,得到a相和b相的阻抗之和。将阻抗测量模块参 数对话框中的“增益参数”(Multiplication factor)改为0.5, 即可得到一相阻抗。
Vprot 2.5 2In XC 2.5 2 2 42.24 298.7 kV
(7-4) 其中,In为线电流有效值,取值为2 kA。
第7章 高压电力系统的电力装置仿真
为了保护MOV,在MOV上并联了由断路器模块等效的 放电间隙Gap,当MOV上承受的能量超过阈值时,间隙放电。 与放电间隙串联的RL支路是用来限制电容电流上升率的阻 尼电路。“能量和放电间隙触发”(Energy & Gap firing)子系 统完成对放电间隙Gap的控制,仿真系统模型如图7-6。该系 统对MOV中的能量进行积分计算,当能量值大于30 MJ时发 送合闸信号到断路器模块Gap中,断路器合闸,实现间隙放 电。
相角1 为 18.22°,母线 B1 的 a 相电流幅值 2Ia 为 1.56 kA,
matlab求解动力学微分方程

实用文档matlab求解动力学微分方程如今随着科学技术的持续发展和进步,动力学微分方程的求解成为了科研工作和工程应用中的一项基本任务。
作为一种广泛应用的计算工具,MATLAB可以通过其强大的数值计算和仿真功能来解决这一问题。
本文将深入探讨MATLAB在求解动力学微分方程方面的应用,包括其基本原理、解决方法以及一些实例分析,旨在帮助读者更全面地理解这一主题。
1. 动力学微分方程简介动力学微分方程是描述物质或系统中的运动过程的数学模型。
它们通常通过描述物体的运动、变化或响应来研究和分析不同领域的问题,例如物理、化学、生物学和工程。
2. MATLAB在求解动力学微分方程中的基本原理MATLAB提供了许多用于求解微分方程的函数和工具箱。
其中最常用且强大的函数是ode45,它基于龙格-库塔方法实现了自适应步长控制和高阶插值技术,可以有效地求解一般形式的动力学微分方程。
实用文档3. 使用MATLAB求解动力学微分方程的实例为了更好地理解MATLAB在求解动力学微分方程中的应用,我们将通过一些具体的例子来演示其使用方法。
我们可以考虑一个简单的弹簧振动方程,其中有一个质点通过弹簧受到外力作用。
通过建立该系统的微分方程模型,并利用MATLAB进行求解,我们可以得到质点的运动轨迹和其他相关信息。
4. 对MATLAB求解动力学微分方程的个人观点和理解作为一个计算工具,MATLAB无疑为求解动力学微分方程提供了便利和高效的方式。
其强大的数值计算和仿真功能能够帮助研究人员和工程师更好地理解和分析系统的运动行为。
然而,我们也应该注意,对于一些复杂的非线性动力学问题,可能需要更高级的数值方法和算法才能得到准确的解。
MATLAB作为一种常用的计算工具,在求解动力学微分方程方面具有广泛的应用。
通过掌握其基本原理和使用方法,我们可以有效地解决各类动力学问题,并更好地理解系统的运动行为。
当然,对于更复杂的问题,我们也应该不断地学习和探索更高级的数值方法,以求得更准确的解。
MATLAB编程与工程应用——第7章 MATLAB解方程与函数极值
MATLAB解方程与函数极值
7.1 线性方程组求解
二、迭代解法
迭代解法非常适合求解大型系数矩阵的方程组。在数值 分析中,迭代解法主要包括 Jacobi迭代法、GaussSerdel迭代法、超松弛迭代法和两步迭代法。 Jacobi迭代法 1.Jacobi迭代法 对于线性方程组Ax=b,如果A为非奇异方阵,即aii≠0, 则A可分解为A=D-L-U,其中D为对角阵,其元素为A的对 角元素,L与U为A的下三角阵和上三角阵,于是Ax=b化为: x=D-1(L+U)x+D-1b 与之对应的迭代公式为: x(k+1)=D-1(L+U)x(k)+D-1b 利用jacobi jacobi迭代法求方程的解 例7.4 利用jacobi迭代法求方程的解 exp7_4.m jacobi.m
如s=2时
j =1 j =1
i 1
i 1
1 ym +1 = ym + h[ f ( xm , ym ) + f ( xm + h, ym + h)] 2
Matlab在物理学中的应用
Matlab在物理学中的应用Matlab是一种广泛应用于工程计算及数值分析领域的功能强大的计算机高级语言,它集科学计算、图象处理于一身,并提供了丰富的图形界面设计方法。
它的特点是语法结构简单,数值计算高效,图形功能完备,特别适合于非计算机专业的编程人员完成日常数值计算、科学实验数据处理、图形图象生成等通用性任务时使用,因而在统计、信号处理、自动控制、图象处理、人工智能及计算机通信等领域得到了广泛应用。
现在,我们将介绍Matlab在物理学中的一些应用。
首先,我们来介绍Matlab在动力学中的应用。
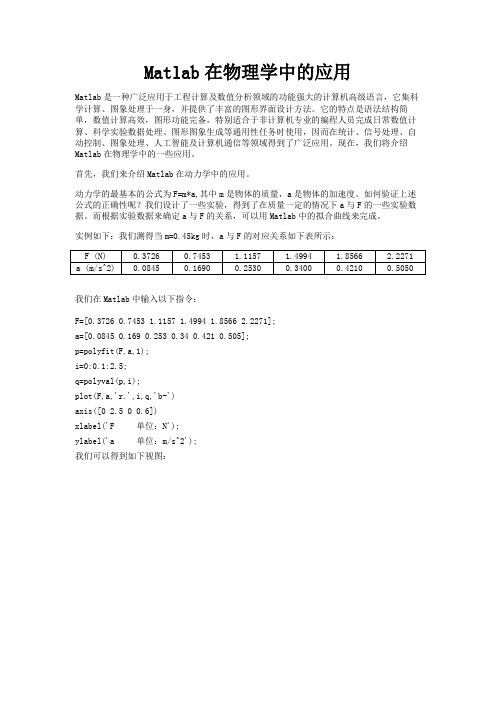
动力学的最基本的公式为F=m*a,其中m是物体的质量,a是物体的加速度。
如何验证上述公式的正确性呢?我们设计了一些实验,得到了在质量一定的情况下a与F的一些实验数据。
而根据实验数据来确定a与F的关系,可以用Matlab中的拟合曲线来完成。
实例如下:我们测得当m=0.45kg时,a与F的对应关系如下表所示:我们在Matlab中输入以下指令:F=[0.3726 0.7453 1.1157 1.4994 1.8566 2.2271];a=[0.0845 0.169 0.253 0.34 0.421 0.505];p=polyfit(F,a,1);i=0:0.1:2.5;q=polyval(p,i);plot(F,a,'r.',i,q,'b-')axis([0 2.5 0 0.6])xlabel('F 单位:N');ylabel('a 单位:m/s^2');我们可以得到如下视图:上图中蓝色的直线是F与a线性拟合曲线,我们看到实验数据点(F,a)几乎全分布在拟合曲线上,由此我们可以大致得到结论,F与a呈线性关系。
延长拟合曲线可发现其大致过原点,由此我们可以推断F与a成正比关系,直线的斜率即为物体质量的倒数。
再次,我们来看看Matlab在绘制简谐运动图像上的应用。
matlab拟合动力学参数

matlab拟合动力学参数
要在 MATLAB 中拟合动力学参数,可以使用 MATLAB 中的曲线拟合工具箱(Curve Fitting Toolbox)。
下面是一种拟合动力学参数的基本流程:
1. 确定动力学模型的结构和参数。
例如,如果要拟合一个一阶动力学模型,可以使用以下形式的方程:y = a*exp(b*x) + c,其中a、b、c是待确定的参数。
2. 准备数据。
将实验或观测数据以向量的形式导入到MATLAB 中。
假设数据的自变量为x,因变量为y。
3. 使用曲线拟合工具箱提供的拟合函数进行参数拟合。
在MATLAB 命令窗口中输入“cftool”打开曲线拟合工具箱界面。
选择“从文件导入数据”或手动输入数据。
在工具箱界面中,选择适当的拟合类型(例如指数型)和模型(例如一阶动力学模型),然后点击“拟合”按钮。
4. 分析拟合结果。
在拟合完成后,曲线拟合工具箱将显示拟合曲线和拟合参数。
可以分析拟合结果,比如查看拟合曲线与原始数据的拟合程度,以及拟合参数的值和相关统计信息。
5. 获取拟合参数。
在拟合结果中,可以找到拟合参数的值。
将这些值用于进一步的分析或应用。
需要注意的是,正确选择动力学模型的结构和参数是关键。
如
果对动力学模型有疑问或不确定,可以查阅相关文献或咨询专业领域的专家。
精品课件-MATLAB及其在理工课程中的应用-第7章
MATLAB工具,也可以不简化,把方程组写成矩阵形式AX=B,用矩阵
除法X=A\B直接来解。在本题中,X和B都是6×1列向量,而A是6×6
阶方阵。
在编写程序时,尽量用文字变量,先输入已知条件,在程序开
始处给它们赋值,这样得出的程序具有一定的普遍性,若要修改参
数,只需修改头几行的数据即可。
第7章 MATLAB在力学、机械中的应用举例
θ2
由杆2两端点a和b的速ω3度沿LL1杆3 1c长coos垂s 3直2方21向的22分 量之差,可以求出杆2
的角速度
ω2
1 L2
L3s in θ3
π 2
θ2
L1ω1sin
π 2
θ1
θ2
◆ 建模
本程序可用来对平面任意力系作简化,得出一个合力。求合力 的过程可分成两步。
第一步: 向任意给定点o简化,得到一个主矢 和一个主矩
Mo,即
N
Fo
Fo Fi[Fox , Foy ]
i1
N N
式中, 是 M 作o 用 点i1的(r矢i -径ro;) Fi 是io1点(x的i -矢x径o )F。yi (yi yo )Fxi
x=z(∶,1);y=z(∶,2); %把z写成x、y两个分量形式 vx=diff(z(∶,1))./dt; vy=diff(z(∶,2))./dt;
%注意每差分一次序列长度减1 wx=diff(vx)./dt(1∶Ldt-1); wy=diff(vy)./dt(1∶Ldt-1);
%求二次导数 [t(2∶Ldt),x(2∶Ldt),y(2∶Ldt),wx,wy] %显示数据
Fy(i)]= ’);
r(I,∶)=input(‘ 力 F(i) 的 一 个 作 用 点 的 坐 标
Matlab技术在机械振动分析中的应用案例
Matlab技术在机械振动分析中的应用案例引言:机械振动作为机械工程领域中非常重要的研究方向,对于机械设备性能的评估和故障诊断具有关键作用。
随着计算机技术的飞速发展,Matlab作为一种功能强大的数学计算软件,被广泛应用于机械振动领域。
本文将通过介绍一些典型的应用案例,展示Matlab在机械振动分析中的优越性和实用性。
一、弹簧振动分析弹簧振动是机械系统中常见的一种振动形式。
通过Matlab可以方便地建立弹簧振动的数学模型,进行分析和仿真。
以弹簧单自由度系统为例,我们可以通过编写Matlab程序来求解该系统的振动特性,比如自然频率、阻尼比等参数。
此外,Matlab还提供了丰富的绘图功能,可以用来绘制系统的振动曲线和频谱图,进一步分析和评估系统的性能。
二、子午线摆振动分析子午线摆是一种简单而重要的振动系统,在物理实验教学中被广泛应用。
利用Matlab可以实现子午线摆的运动仿真和数据分析。
通过建立子午线摆的运动微分方程,我们可以利用Matlab的数值求解功能来模拟摆的运动过程,并绘制出摆角随时间的变化曲线。
此外,Matlab还可以计算出摆的周期和频率,提供了便捷的数据处理方法,方便进行实验数据的比对和验证。
三、转子系统振动分析转子系统的振动分析是机械工程中一项关键任务。
Matlab提供了大量的信号处理和频谱分析工具,可以用来对转子系统的动态性能进行评估和诊断。
首先,我们可以通过Matlab对转子系统的模态进行分析,求解出转子的模态频率和振型。
接着,利用Matlab的FFT函数进行频谱分析,可以得到转子系统的频谱图,并进一步分析出存在的谐波成分。
通过与参考频谱进行比较,我们可以判断转子系统是否存在异常振动,进而评估其工作状态。
四、车辆悬架系统振动分析车辆悬架系统的振动特性直接影响着驾驶员的驾驶感受和乘坐舒适度。
Matlab在车辆悬架系统的振动分析中发挥着重要作用。
通过建立车辆悬架系统的动力学模型,并利用Matlab进行模拟和仿真,我们可以得到车辆在不同路况下的振动响应。
MATLAB与工程应用-第7章-动力学与振动

(3)阻尼系数为5时是过阻尼情况
由初始条件(位移和速度均为1时)建立执行文件menu72.m
zeta=[0.1 1.0 5.0]; tspan=linspace(0,40,400);%生成0-40的四百个线
性点 lintype=['-b' '--r' '---r']; for i=1:3
[t,x]=ode45('FreeOcillation',tspan,[1 1],[],zeta(i));
建立函数文件orbit.m
function xd=orbit(t,x)
xd=[x(2);x(1)*x(4)^2-4.0*pi^2/x(1)^2;
x(4);-2.0*x(2)*x(4)/x(1)];
三组初始条件(t=0):
组
X1初始 X2初始 X3初始 X4初始 轨迹类型1来自200
1.5 椭圆
2
1
0
0
程 序 运 行 结 果
7.2单自由度系统 7.2.1概述
一.力学模型
c K,a
X(t)
F(t)=X(0)kf(t)
m
弹簧—质量—阻尼系统
其中:振体质量为m,弹簧的线性系数为k,非线 性系数为a,阻尼系数为c,外力F(t)。
二.运动微分方程
用x表示系统的位移,则运动微分方程为:
d d2x 22 d d xxx3X 0f()
m1等于卫星的质量,r为卫星球心与地球
球心间的距离。其运动轨迹由下列方程组
决定:
d 2r
d 2
r
da 2
d
4 2
r2
r d 2a 2 dr da 0
d 2 d d
MATLAB中常见的结构动力学分析技巧

MATLAB中常见的结构动力学分析技巧在MATLAB中进行结构动力学分析时,常见的技巧如下:1. 建立模型:使用MATLAB的建模工具箱,如Simulink或Simscape,可以方便地建立结构动力学模型。
这些工具箱提供了丰富的图形界面和预定义的组件,使得建立模型更加简单和直观。
2. 选择合适的数值方法:对于结构动力学分析,常用的数值方法包括有限元法、边界元法和拉格朗日法等。
在MATLAB中,可以利用有限元分析工具箱(FEATool)或边界元分析工具箱(BEMTool)来实现这些数值方法的应用。
此外,MATLAB还提供了一系列数值方法的函数库,如ode45、ode23等,可以用于解动力学方程。
3. 系统的模态分析:模态分析是结构动力学中的一项重要技术,用于确定系统的固有频率和振型。
MATLAB提供了现成的函数库,如eig、eigs等,用于求解系统的特征值和特征向量。
通过分析这些特征值和特征向量,可以确定系统的固有频率和振型,进而了解结构的动态特性。
4. 频谱分析:频谱分析是结构动力学中常用的分析方法之一,用于确定结构在不同频率下的响应。
在MATLAB中,可以利用FFT(快速傅里叶变换)函数和相关的函数库,如pwelch、spectrogram等,对信号进行频谱分析。
这些函数库提供了多种频谱分析方法,如功率谱密度、频谱图和甚至是瀑布图等。
5. 响应分析:响应分析是结构动力学中常用的分析方法之一,用于确定结构在特定外力作用下的响应情况。
在MATLAB中,可以使用ode函数和相关的函数库,如lsim、bode等,对结构进行响应分析。
这些函数库提供了多种分析方法,如自由振动、强迫振动和频率响应等。
6. 参数识别:参数识别是结构动力学中的关键技术之一,用于确定模型的未知参数。
在MATLAB中,可以使用系统辨识工具箱(System Identification Toolbox)进行参数识别。
该工具箱提供了多种参数识别方法,如最小二乘法、极大似然估计法和频率域法等。
matlab使用拉格朗日法计算动力学方程参数

matlab使用拉格朗日法计算动力学方程参数标题:用MATLAB使用拉格朗日法计算动力学方程参数导言:在工程和科学领域中,我们经常需要对系统进行动力学建模和分析。
动力学方程是描述系统运动的数学表达式,它们可以帮助我们理解和预测系统的行为。
而计算动力学方程的参数对于系统的设计、优化和控制具有重要意义。
本文将介绍如何使用MATLAB编程语言和拉格朗日法来计算动力学方程参数,通过数值求解和优化方法,为工程师和科学家提供一个有力的工具。
1. 动力学方程与参数计算在动力学中,系统可以通过一组微分方程来描述。
这些方程表示系统的行为和演变,通常包括质量、速度、加速度和其他相关因素。
对于复杂系统,计算动力学参数可能是一项繁琐且复杂的任务。
幸运的是,拉格朗日法可以简化这一过程,通过定义能量或运动方程来推导系统动力学方程。
2. 拉格朗日法介绍拉格朗日法是一种基于能量和运动方程的变分法。
通过将系统的动能和势能组合成拉格朗日函数,并使用欧拉-拉格朗日方程,可以得到系统的运动方程。
拉格朗日法不仅适用于具有广义坐标的连续系统,还适用于离散系统和有束缚条件的系统。
3. MATLAB编程实现在MATLAB中,我们可以使用符号计算工具包来处理复杂的数学表达式和符号计算。
我们需要定义系统的广义坐标、广义速度和拉格朗日函数。
通过欧拉-拉格朗日方程生成系统的运动方程。
我们可以使用数值求解和优化方法来计算动力学参数。
4. 示例:双摆系统为了更好地理解如何使用MATLAB实现拉格朗日法,我们将以一个双摆系统为例。
双摆系统由两个连杆组成,每个连杆上挂有一个质点。
我们需要计算系统的动力学参数,包括质点的位置、速度和加速度。
通过拉格朗日法,我们可以推导出系统的运动方程,并使用MATLAB 进行求解和优化。
5. 讨论与总结本文介绍了使用MATLAB编程语言和拉格朗日法计算动力学方程参数的方法。
通过拉格朗日法,我们可以简化动力学参数的计算,并为系统的设计和优化提供可行性的解决方案。
matlab 刚体空间运动动力学

matlab 刚体空间运动动力学
Matlab是一种强大的工程计算软件,可以用来进行各种数学建模和仿真。
在工程领域,特别是在机械工程和航天航空领域,刚体空间运动动力学是一个重要的研究领域。
刚体空间运动动力学涉及到刚体在三维空间中的运动、旋转和受力情况,对于设计和控制航天器、机器人和其他复杂机械系统具有重要意义。
在Matlab中,可以利用其强大的数学建模和仿真功能来进行刚体空间运动动力学的研究和分析。
通过Matlab,可以方便地进行刚体的运动方程建模、动力学仿真和分析,从而帮助工程师和研究人员更好地理解和优化复杂的机械系统。
在进行刚体空间运动动力学的研究时,Matlab可以用来进行以下工作:
1. 刚体运动方程的建模,利用Matlab的符号计算和数值计算功能,可以方便地建立刚体在空间中的运动方程,包括位置、速度和加速度等。
2. 动力学仿真,利用Matlab的仿真工具,可以对刚体在不同
受力情况下的运动进行仿真,从而帮助工程师和研究人员更好地理
解系统的动力学特性。
3. 控制系统设计,Matlab还可以用来设计和分析刚体空间运
动的控制系统,包括姿态控制、轨迹跟踪等,从而帮助优化系统的
性能。
总之,Matlab在刚体空间运动动力学研究中具有重要的应用价值,可以帮助工程师和研究人员更好地理解和优化复杂的机械系统。
通过Matlab,可以更高效地进行刚体空间运动动力学的建模、仿真
和分析,为工程实践和科学研究提供有力的支持。
matlab simulink 动力学问题

matlab simulink 动力学问题动力学问题是指研究物体运动、运动规律和动力学关系等方面的问题。
在工程领域中,动力学问题广泛运用于机械设计、控制系统设计、车辆动力学、机器人运动控制等方面。
Matlab Simulink是一款基于图形模型的设计与仿真环境,可以用于解决动力学问题。
Simulink提供了一种直观的、图形化的方式,允许用户将复杂的系统划分为多个模块,并通过信号连接这些模块,从而构建整个系统的模型。
用户可以在模型中定义系统的数学公式、边界条件、初始条件等,并基于这些模型进行仿真、分析和优化。
在动力学问题中,常常用到的公式包括牛顿第二定律、动量定理、角动量定理、能量守恒定律等。
以机械系统为例,当我们考虑一个物体受到外力作用时的运动情况时,可以利用牛顿第二定律来描述物体的运动规律。
根据牛顿第二定律,物体受力的大小与所受的加速度成正比,反方向与加速度相同。
因此,在Matlab Simulink中,我们可以通过建立物体的模型,在模型中加入受力的作用,并通过求解运动方程来得到物体的运动状态。
例如,考虑一个简单的弹簧振子系统,该系统由一个质量为m的物体和一个弹簧组成。
弹簧的劲度系数为k,物体受到地球引力的作用。
我们可以建立如下的模型来描述该系统的动力学问题:-建立物体的动力学方程:F = m*a,其中a表示物体的加速度,F表示作用在物体上的合力。
合力包括地球引力和弹簧的作用力,分别由mg和-kx表示,其中g表示地球的重力加速度,x表示弹簧的位移量。
-通过求解动力学方程,可以得到物体的加速度,进而得到物体的速度和位移。
在Simulink中,我们可以通过建立一个模块化的系统模型,将这些步骤一一对应地实现。
具体步骤如下:1.在Simulink中创建一个新模型。
2.在模型中添加一个纵向布局的框架,用于容纳其他模块。
3.添加一个输入信号,用于控制模型的运行时间。
4.添加一个数学运算模块,用于计算物体受力大小。
基于MATLAB的振动模态分析

摘要振动系统是研究机械振动的运动学和动力学,研究单自由系统的振动有着实际意义,因为工程上有许多问题通过简化,用单自由度系统的振动理论就能得到满意的结果。
模态是振动系统的一种固有振动特性,模态一般包含频率、振型、阻尼。
振动系统问题是个比较虚拟的问题,比较抽象的理论分析,对于问题的分析可以实体化建立数学模型,通过MATLAB可以转化成为图像。
单自由度频率、阻尼、振型的分析,我们可以建立数学模型,最后通过利用MATLAB编程实现数据图形;多自由度主要研究矩阵的迭代求解,我们在分析抽象的理论的同时根据MATLAB编程实现数据的迭代最后可以得到所要的数据,使我们的计算更加简便。
利用MATLAB编程并验证程序的正确性。
通过程序的运行,能快速获得多自由度振动系统的固有频率以及主振型,为设计人员提供了防止系统共振的理论依据,也为初步分析各构件的振动情况以及解耦分析系统响应奠定了基础。
关键词:振动系统;单自由度;MATLAB;多自由度AbstractVibration system is to study the kinematics and dynamics of mechanical vibration, the vibration of a single free system has practical significance, because there are many engineering problems by simplifying, using the vibration theory of a single degree of freedom system can be satisfied with the results.Vibration system problems is a relatively virtual problems, more abstract and theoretical analysis, problem analysis for a mathematical model can be materialized by MATLAB can be converted into images. Single degree of freedom frequency, damping, mode shape analysis, we can create mathematical models, the final program data through the use of MATLAB graphics; many degrees of freedom main matrix iterative solution, our analysis based on abstract theory, while MATLAB programming The last iteration of data can be the desired data, so our calculations easierUsing MATLAB programming and verify the correctness of the program.Through the process of operation, can quickly obtain multiple degrees of freedom vibration system and the main vibration mode natural frequency for the design to prevent resonance provide the theoretical basis for the preliminary analysis of the vibration of each component, and laid the decoupling of system response basis.Key words:vibrating system; Single Degree of Freedom ;MATLAB; multiple degree offreedom辽宁工程技术大学毕业设计(论文)1 绪论1.1问题的提出机械振动是一门既古老又年轻的科学,随着人类科学技术的不断进步振动理论得到不断的发展和完善。
matlab拟合动力学参数

matlab拟合动力学参数(最新版)目录一、引言二、MATLAB 拟合动力学方程的基本要求三、拟合过程四、非线性函数的拟合方法五、线性函数的拟合方法六、结论正文一、引言在工程领域,动力学方程常常被用来描述物体运动的规律。
然而,在实际应用中,物体的运动状态可能会受到许多因素的影响,使得运动方程的参数难以确定。
此时,我们可以通过 MATLAB 拟合动力学方程来确定这些参数。
二、MATLAB 拟合动力学方程的基本要求在使用 MATLAB 拟合动力学方程时,需要有一定数量的有效数据(一般要 10 组以上),才能进行拟合。
此外,还需要自定义模型函数(如动力学方程的一般表达式)和初定 x0 的初值。
三、拟合过程拟合过程主要包括以下几个步骤:1.准备数据:首先需要收集一定数量的有效数据,包括物体的位移、速度等。
2.自定义模型函数:根据动力学方程的一般表达式,编写一个函数模型。
3.初定 x0 的初值:根据实际情况,选择一个合理的 x0 初值。
4.进行拟合:对于非线性函数,可以使用 lsqcurvefit() 或nlinfit() 函数来拟合其方程的系数;对于线性函数,可以使用 regress() 函数来拟合其方程的系数。
四、非线性函数的拟合方法当拟合函数是非线性函数时,我们可以使用 lsqcurvefit() 或nlinfit() 函数来拟合其方程的系数。
这两个函数都需要输入函数模型、数据和初始猜测值。
五、线性函数的拟合方法当拟合函数是线性函数时,我们可以使用 regress() 函数来拟合其方程的系数。
该函数需要输入函数模型、数据和初始猜测值。
六、结论通过 MATLAB 拟合动力学方程,我们可以有效地确定物体运动的参数,从而更好地描述物体的运动状态。
MATLAB在风振动仿真分析中的应用_动力分析

MATLAB在风振动仿真分析中的应用_动力分析论文导读::已广泛应用于电子、通信、自动控制等专业。
结构动力分析显得越来越重要。
进行动态仿真。
1引言近年来,随着工程结构向更高、更轻、跨度更大的方向发展,风荷载对结构的影响越来越大,仅靠静力分析很难满足工程设计的要求,结构动力分析显得越来越重要。
动力分析远较静力分析复杂,结构的位移、变形、内力、损伤与破坏都在随时间而不断变化,计算量非常大,计算结果也很复杂,结果的分析和整理工作十分艰巨。
然而,计算机技术的发展为动力分析及结果的后处理提供了有效的工具。
Matlab是美国MathWorks公司研制开发的商业数学软件,是用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境平台。
Matlab平台下的SIMULINK组件专门用于动态系统的建模、仿真和仿真综合分析,并提供了集成化的图形环境,其二次开发能力、可视化功能、编程建模能力和数值积分能力等方面的功能强大。
SIMULINK已广泛应用于电子、通信、自动控制等专业,成为动力分析的有力工具,但是动力分析,其在土木工程领域内的应用却非常有限。
本文在SIMULINK环境下,将设置有粘弹性阻尼器的结构作为控制系统,建立其数学模型及状态方程,施加模拟的风荷载,进行动态仿真,得到结构的动态反应。
该方法弥补了现有结构风振仿真分析程序的不足,为后续工作奠定基础。
2动力分析模型多自由度建筑结构在风荷载作用下任意时刻的动力反应方程为(1)式中,M0,C0,K0分别为未控结构的质量、刚度和阻尼矩阵;分别为结构的位移、速度、和加速度向量;P(z,t)为水平脉动风荷载。
为了控制结构的振动,在结构上设置粘弹性阻尼器。
由于粘弹性阻尼器是直接通过阻尼来耗散能量并达到减小结构风振反应的,因此在结构上设置粘弹性阻尼器实际上就是增加了结构的阻尼,即设置粘弹性阻尼器的结构的实际阻尼为结构本身阻尼和由粘弹性阻尼器提供的等效阻尼之和,则在粘弹性阻尼器控制下多自由度结构的动力反应方程为(2)式中,M=M0,C=C0+C,K=K0+K;C,K为粘弹性阻尼器提供的刚度和阻尼矩阵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
subplot(2,1,1); plot(t,x(:,1),lintype(2*(i-1)+1:2*i)); hold on subplot(2,1,2); plot(x(:,1),x(:,2),lintype(2*(i-1)+1:2*i)); hold on end subplot(2,1,1);
2 2
dτ dx 2 4π 2 2 = x1 x 4 − 2 dτ x1
2
dx3 = x4 dτ dx 4 2 x2 x4 =− dτ x1
d r 4π 2 d 2a dr da da − r = − 2 KK r 2 + 2 =0 2 dτ dτ dτ r dτ dτ
带入前面的微分方程组,可得四个一阶微分方程。 带入前面的微分方程组,可得四个一阶微分方程。
Logspace, rad2deg, loglog, semilogx see help
编制执行文件frequency72.m,求频率响应。 一.编制执行文件 编制执行文件 ,求频率响应。
m = 1; zeta = 0.1:0.1:1; k = 1; wn = sqrt(k/m); 10 w = logspace(-1,1,400); rad2deg = 180/pi; s = j*w; for cnt = 1:length(zeta) xfer(cnt,:)=(1/m) ./ (s.^2 + 2*zeta(cnt)*wn*s + wn^2); mag(cnt,:) = abs(xfer(cnt,:)); phs(cnt,:) = angle(xfer(cnt,:))*rad2deg; end for cnt = 1:length(zeta) figure(1) loglog(w,mag(cnt,:),'k-')
0
function xdot=ForceOcillation(t,x,dummy,zeta,Omega,x0)
xdot=[x(2);-2.0*zeta*x(2)-x(1)+x0*cos(Omega*t)];
为了获得频谱图,建立函数文件 为了获得频谱图 建立函数文件 AmplitudeSpectrum.m
第七章 动力学与振动
7.1轨迹 轨迹 7.2单自由度系统 单自由度系统 7.3多自由度系统 多自由度系统
7.1轨迹 轨迹 举例说明:重力场中有两个物体 其中质量为m2 重力场中有两个物体,其中质量为 举例说明 重力场中有两个物体 其中质量为 的物体固定,而质量为 的物体绕m2做平面圆 而质量为m1的物体绕 的物体固定 而质量为 的物体绕 做平面圆 周运动.做圆周运动的 做圆周运动的m1物体的轨道半径用变 周运动 做圆周运动的 物体的轨道半径用变 表示,角度用变量 表示. 量r表示 角度用变量 表示 表示 角度用变量a表示 m1 r a m2 两物体系统
由初始条件(位移和速度均为 时 建立执行文件menu72.m 由初始条件(位移和速度均为1时)建立执行文件
zeta=[0.1 1.0 5.0]; tspan=linspace(0,40,400); lintype=['-b' '--r' '---r']; for i=1:3
[t,x]=ode45('FreeOcillation',tspan,[1 1],[],zeta(i));
function[f,amplitude]=AmplitudeSpectrum(yy,Fs,Nstart,N); f=(Fs*(0:N-1)/N)*2.0*pi; amplitude=abs(fft(yy(Nstart:Nstart+N),N))/N;
采样速率30/6000=0.005,则采样频率 则采样频率 采样速率 1/0.005=200,这个频率远远超出了必须达到的 这个频率远远超出了必须达到的 采样频率,结果显示截短频谱图 结果显示截短频谱图,需设置 采样频率,结果显示截短频谱图,需设置 Nstart=3200,N=2^11=2048。 。 fft的应用见 的应用见Help 的应用见 编制执行文件menu72f.m 编制执行文件
程 序 运 行 结 果
7.2.4 线性系统的频率响应、阶跃响应及 线性系统的频率响应、 脉冲响应
单自由度振动系统的强迫振动微分方程可为: 单自由度振动系统的强迫振动微分方程可为:
通过LAPLACE变换,得传递函数: 变换,得传递函数: 通过 变换
Байду номын сангаас
其中: 其中: ω = k m n
c ζ = 2 mω n
mω n
阻尼因子 引入新变量转化状态空间方程形式: 引入新变量转化状态空间方程形式:
x1 = x dx x2 = dτ
dx1 = x2 dτ dx 2 3 = −2ζx 2 − x1 − αx1 + X 0 f (τ ) dτ
ζ =
c 2 mω n
7.2.2 线性系统的自由振动
一.运动微分方程 运动微分方程 当 α = F (τ ) = 0 时,得到线性振动系统的自由 振动方程。 振动方程。 d2x dx + 2ζ +x=0 2 dτ dτ 二.MATLAB求解 求解 对应的函数文件FreeOcillation.m 对应的函数文件
yy=x(:,1); N=2048;Nstart=3200;Fs=200; [f,Amplitude]=AmplitudeSpectrum(yy,Fs,Nstart,N); semilogy(f(1:40),2*Amplitude(1:40)); xlabel('Frequency'); ylabel('Amplitude'); title('Response spectrum of a linear system'); hold on subplot(2,1,1); xlabel('Time( \tau)'); ylabel('Displacement x( \tau)'); title('Response of a linear system'); hold on
title('SDOF frequency response magnitudes for zeta = 0.2 to 1.0 in steps of 0.2') xlabel('Frequency(rad/sec)') ylabel('Magnitude') grid hold on end hold off for cnt = 1:length(zeta) figure(2) semilogx(w,phs(cnt,:),'k-') title('SDOF frequency response phases for zeta = 0.2 to 1.0 in steps of 0.2') xlabel('Frequency(rad/sec)') ylabel('phase') grid hold on end hold off
程 序 运 行 结 果
7.2单自由度系统 单自由度系统 7.2.1概述 概述
一.力学模型 力学模型 X(t) ()
c K,a
F(t)=X(0)kf(t) () ( ) ()
m
弹簧—质量 阻尼系统 弹簧 质量—阻尼系统 质量 其中:振体质量为m,弹簧的线性系数为k, 其中:振体质量为 ,弹簧的线性系数为 ,非线 性系数为a,阻尼系数为c,外力F( )。 性系数为 ,阻尼系数为 ,外力 (t)。
卫星绕地球转动时, 等于地球的质量 等于地球的质量, 卫星绕地球转动时,m2等于地球的质量, m1等于卫星的质量,r为卫星球心与地球 等于卫星的质量, 等于卫星的质量 为卫星球心与地球 球心间的距离。 球心间的距离。其运动轨迹由下列方程组 决定: 决定:
式中: 其中t是时间变量 是时间变量, 为 式中:τ = t / p ,其中 是时间变量,p为 物体在地球表面做圆周运动的周期。在地 物体在地球表面做圆周运动 球表面,r=6.373x106 m。
建立函数文件orbit.m 建立函数文件 function xd=orbit(t,x) xd=[x(2);x(1)*x(4)^2-4.0*pi^2/x(1)^2; x(4);-2.0*x(2)*x(4)/x(1)]; 三组初始条件(t=0): 三组初始条件 :
组 1 2 3
X1初始 X2初始 X3初始 X4初始 轨迹类型
zeta=0.4;Omega=3.0;x0=50; tspan=linspace(0,30,6000); options=odeset('RelTol',1e-8,'AbsTol',1e-8); lintype=['-b']; [t,x]=ode45('ForceOcillation',tspan,[0 0],options,zeta,Omega,x0); subplot(2,1,1); plot(t,x(:,1)); axis([0 30 -8 8]); hold on subplot(2,1,2);
function xdot=FreeOcillation(t,x,dummy,zeta)
xdot=[x(2);-2.0*zeta*x(2)-x(1)]; 三种阻尼系数( )阻尼系数为0.1时是欠阻尼 三种阻尼系数(1)阻尼系数为 时是欠阻尼 情况( )阻尼系数为1时是临界阻尼情况 情况(2)阻尼系数为 时是临界阻尼情况 (3)阻尼系数为 时是过阻尼情况 )阻尼系数为5时是过阻尼情况
xlabel('Time( \tau)'); ylabel('Displacement x( \tau)'); title('Displacement as a function of( \tau)'); axis([0 40 -2.0 2.0]); text(2.7,-1.3,'阻尼系数=0.1'); text(3.6,-0.1,'1.0'); text(3.6,1.0,'5.0'); subplot(2,1,2); xlabel('Displacement'); ylabel('Velocity'); title('Phase portrait'); axis([-2.0 2.0 -2.0 2.0]); text(0.7,-1.25,'阻尼系数=0.1'); text(0.8,-0.65,'1.0'); text(0.8,0.1,'5.0');