自动控制原理控制系统的频率特性实验报告
自动控制频率特性测试实验报告
自动控制频率特性测试实验报告1. 引言在现代自动控制系统中,频率特性是一个重要的参数,对于系统的稳定性和性能起着决定性的作用。
频率特性测试实验旨在评估自动控制系统的频率响应,并分析系统在不同频率下的性能。
本实验报告将介绍自动控制频率特性测试实验的目的、实验器材、实验步骤和实验结果分析。
2. 实验目的本实验的主要目的是通过频率响应测试,评估自动控制系统的频率特性以及系统在不同频率下的性能。
具体目标包括:1.测试系统的幅频特性,即系统的增益与频率之间的关系;2.测试系统的相频特性,即系统的相移与频率之间的关系;3.分析系统的频率特性对系统的稳定性和性能的影响。
3. 实验器材本实验所需的器材包括:•信号发生器:用于产生不同频率的输入信号;•可变增益放大器:用于控制输入信号的幅度;•相位巡迥器:用于调节输入信号的相位;•示波器:用于观测输入信号和输出信号;•自动控制系统:接受输入信号并提供相应的控制输出。
4. 实验步骤4.1 准备工作1.确保实验器材连接正确,信号发生器连接到自动控制系统的输入端,示波器连接到自动控制系统的输出端。
2.将可变增益放大器和相位巡迥器分别接入信号发生器的输出端,用于调节输入信号的幅度和相位。
4.2 测试幅频特性1.设置信号发生器的频率为起始频率,将幅度设置为合适的值。
2.将相位巡迥器的相位设置为零,确保输入信号的相位与输出信号相位一致。
3.记录输入信号和输出信号的幅度,并计算增益。
4.逐渐增加信号发生器的频率,重复步骤3,直到达到结束频率。
4.3 测试相频特性1.设置信号发生器的频率为起始频率,将幅度和相位设置为合适的值。
2.记录输入信号和输出信号的相位差,并计算相移。
3.逐渐增加信号发生器的频率,重复步骤2,直到达到结束频率。
4.4 结果记录与分析1.将实验得到的数据记录下来,包括输入信号频率、幅度、输出信号频率、幅度、相位差等。
2.绘制幅频特性曲线图,分析系统的增益随频率变化的规律。
实验三 系统频率特性曲线的绘制及系统分析
《自动控制原理》实践报告实验三系统频率特性曲线的绘制及系统分析熟悉利用计算机绘制系统伯德图、乃奎斯特曲线的方法,并利用所绘制图形分析系统性能。
一、实验目的1.熟练掌握使用MATLAB软件绘制Bode图及Nyquist曲线的方法;2.进一步加深对Bode图及Nyquist曲线的了解;3.利用所绘制Bode图及Nyquist曲线分析系统性能。
二、主要实验设备及仪器实验设备:每人一台计算机奔腾系列以上计算机,配置硬盘≥2G,内存≥64M。
实验软件:WINDOWS操作系统(WINDOWS XP 或WINDOWS 2000),并安装MATLAB 语言编程环境。
三、实验内容已知系统开环传递函数分别为如下形式, (1))2)(5(50)(++=s s s G (2))15)(5(250)(++=s s s s G(3)210()(21)s G s s s s +=++ (4))12.0)(12(8)(++=s s s s G (5)23221()0.21s s G s s s s ++=+++ (6))]105.0)125.0)[(12()15.0(4)(2++++=s s s s s s G 1.绘制其Nyquist 曲线和Bode 图,记录或拷贝所绘制系统的各种图形; 1、 程序代码: num=[50];den=conv([1 5],[1 2]); bode(num,den)num=[50];den=conv([1 5],[1 2]); nyquist(num,den)-80-60-40-20020M a g n i t u d e (d B)10-210-110101102103-180-135-90-450P h a s e (d e g )Bode DiagramFrequency (rad/sec)-1012345-4-3-2-11234Nyquist DiagramReal AxisI m a g i n a r y A x i s2、 程序代码: num=[250];den=conv(conv([1 0],[1 5]),[1 15]); bode(num,den)num=[250];den=conv(conv([1 0],[1 5]),[1 15]);-150-100-5050M a g n i t u d e (d B )10-110101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)nyquist(num,den)3、 程序代码: num=[1 10];den=conv([1 0],[2 1 1]); bode(num,den)-150-100-50050100M a g n i t u d e (d B)10-210-110101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)-1-0.9-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.10-15-10-551015System: sys Real: -0.132Imag: -0.0124Frequency (rad/sec): -10.3Nyquist DiagramReal AxisI m a g i n a r y A x i snum=[1 10];den=conv([1 0],[2 1 1]); nyquist(num,den)-25-20-15-10-5-200-150-100-5050100150200Nyquist DiagramReal AxisI m a g i n a r y A x i s-100-5050100M a g n i t u d e (d B )10-210-110101102-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)4、 程序代码: num=[8];den=conv(conv([1 0],[2 1]),[0.2 1]); bode(num,den)-18-16-14-12-10-8-6-4-20-250-200-150-100-50050100150200250Nyquist DiagramReal AxisI m a g i n a r y A x i snum=[8];den=conv(conv([1 0],[2 1]),[0.2 1]); nyquist(num,den)5、 程序代码: num=[1 2 1]; den=[1 0.2 1 1]; bode(num,den)num=[1 2 1];den=[1 0.2 1 1]; nyquist(num,den)-40-30-20-10010M a g n i t u d e (d B )10-210-110101102-360-270-180-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)-2.5-2-1.5-1-0.500.51 1.5-3-2-1123Nyquist DiagramReal AxisI m a g i n a r y A x i s-100-5050100M a g n i t u d e (d B )10-210-110101102-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)6、 num=[2 4];den=conv(conv([1 0],[2 1]),[0.015625 0.05 1]); bode(num,den)num=[2 4];den=conv(conv([1 0],[2 1]),[0.015625 0.05 1]); nyquist(num,den)2.利用所绘制出的Nyquist 曲线及Bode 图对系统的性能进行分析:(1)利用以上任意一种方法绘制的图形判断系统的稳定性; 由Nyquist 曲线判断系统的稳定性,Z=P-2N 。
自动控制原理与系统控制系统的频率特性
如图4-6所示。
12
四、惯性环节 传递函数 : G(s) C(s) 1
R(s) Ts 1
频率特性 : G( j) C( j) 1
R( j) jT 1
对数频率特性 : L() 20lg
1
20lg
(T)2 1
(T)2 1
Bode图 : arctanT
▪对数幅频特性L(ω)是一条曲线,逐点描绘很烦琐,通常采用近似的 绘制方法,用两条渐进线近似表示.
(极坐标表示法)
U () jV ()
(直角坐标表示法)
(A指(数表)e示j法 ())
图4-2
A() G(j) U 2 () V 2 ()
() G( j) arctan 1 V () U ()
6
例4-1 写出惯性环节的幅频特性、相频特性和频率特性。
解:惯性环节的传递函数为
G(s) 1 Ts 1
2
• 系统(或环节)输出量与输入量幅值之比为幅值频率特性, 简称幅频特性,它随角频率ω变化,常用M(ω)表示。
A()
A c
A r
• 输出量与输入量的相位差为相位频率特性,简称相频特性,它 也随角频率ω变化,常用φ(ω)表示,
c r
幅频特性和相频特性统称为频率特性,用G( jω)表示
3
频率特性就是线性系统(或环节)在正弦输入信号 作用下稳态时输出相量与输入相量之比。
G (j) G(j) G(j)
A() G(j)
() G(j)
幅频特性是输出量与输入量幅值之比M(ω),描述系统 对不同频率正弦输入信号在稳态时的放大(或衰减) 特性。
相频特性是输出稳态相对于正弦输入信号的相位差 φ(ω),描述系统稳态输出时对不同频率正弦输入信号 在相位上产生的相角迟后(或超前)的特性。
自动控制实训实验报告

一、实验目的1. 熟悉并掌握自动控制系统的基本原理和实验方法;2. 理解典型环节的阶跃响应、频率响应等性能指标;3. 培养动手能力和分析问题、解决问题的能力。
二、实验原理自动控制系统是指利用各种自动控制装置,按照预定的规律自动地完成对生产过程或设备运行状态的调节和控制。
本实验主要研究典型环节的阶跃响应和频率响应。
1. 阶跃响应:当系统受到一个阶跃输入信号时,系统输出信号的变化过程称为阶跃响应。
阶跃响应可以反映系统的稳定性、快速性和准确性。
2. 频率响应:频率响应是指系统在正弦输入信号作用下的输出响应。
频率响应可以反映系统的动态性能和抗干扰能力。
三、实验仪器与设备1. 自动控制实验箱;2. 双踪示波器;3. 函数信号发生器;4. 计算器;5. 实验指导书。
四、实验内容与步骤1. 阶跃响应实验(1)搭建实验电路,连接好实验箱和示波器。
(2)输入阶跃信号,观察并记录阶跃响应曲线。
(3)分析阶跃响应曲线,计算系统的超调量、上升时间、调节时间等性能指标。
2. 频率响应实验(1)搭建实验电路,连接好实验箱和示波器。
(2)输入正弦信号,改变频率,观察并记录频率响应曲线。
(3)分析频率响应曲线,计算系统的幅频特性、相频特性等性能指标。
3. 系统校正实验(1)搭建实验电路,连接好实验箱和示波器。
(2)输入阶跃信号,观察并记录未校正系统的阶跃响应曲线。
(3)根据期望的性能指标,设计校正环节,并搭建校正电路。
(4)输入阶跃信号,观察并记录校正后的阶跃响应曲线。
(5)分析校正后的阶跃响应曲线,验证校正效果。
五、实验结果与分析1. 阶跃响应实验(1)实验结果:根据示波器显示的阶跃响应曲线,计算得到系统的超调量为10%,上升时间为0.5s,调节时间为2s。
(2)分析:该系统的稳定性较好,但响应速度较慢,超调量适中。
2. 频率响应实验(1)实验结果:根据示波器显示的频率响应曲线,计算得到系统的幅频特性在0.1Hz到10Hz范围内基本稳定,相频特性在0.1Hz到10Hz范围内变化不大。
实验四 控制系统频率特性的测试 实验报告

实验四控制系统频率特性的测试一.实验目的认识线性定常系统的频率特性,掌握用频率特性法测试被控过程模型的原理和方法,根据开环系统的对数频率特性,确定系统组成环节的参数。
二.实验装置(1)微型计算机。
(2)自动控制实验教学系统软件。
三.实验原理及方法(1)基本概念一个稳定的线性定常系统,在正弦信号的作用下,输出稳态与输入信号关系如下:幅频特性相频特性(2)实验方法设有两个正弦信号:若以)(y tω为纵轴,而以tω作为参变量,则随tω的变xω为横轴,以)(t化,)(y tω?所确定的点的轨迹,将在 x--y平面上描绘出一条封闭的xω和)(t曲线(通常是一个椭圆)。
这就是所谓“李沙育图形”。
由李沙育图形可求出Xm ,Ym,φ,四.实验步骤(1)根据前面的实验步骤点击实验七、控制系统频率特性测试菜单。
(2)首先确定被测对象模型的传递函数, 预先设置好参数T1、T2、ξ、K(3)设置好各项参数后,开始仿真分析,首先做幅频测试,按所得的频率范围由低到高,及ω由小到大慢慢改变,特别是在转折频率处更应该多取几个点五.数据处理(一)第一种处理方法:(1)得表格如下:(2)作图如下:(二)第二种方法:由实验模型即,由实验设置模型根据理论计算结果绘制bode图,绘制Bode图。
(三)误差分析两图形的大体趋势一直,从而验证了理论的正确性。
在拐点处有一定的差距,在某些点处也存在较大的误差。
分析:(1)在读取数据上存在较大的误差,而使得理论结果和实验结果之间存在。
(2)在数值应选取上太合适,而使得所画出的bode图形之间存在较大的差距。
(3)在实验计算相角和幅值方面本来就存在着近似,从而使得误差存在,而使得两个图形之间有差异六.思考讨论(1)是否可以用“李沙育”图形同时测量幅频特性和想频特性答:可以。
在实验过程中一个频率可同时记录2Xm,2Ym,2y0。
(2)讨论用“李沙育图形”测量频率特性的精度,即误差分析(说明误差的主要来源)答:用“李沙育图形”测量频率特性的精度从上面的分析处理上也可以看出是比较高的,但是在实验结果和理论的结果之间还是存在一定的差距,这些误差主要来自于从“李沙育图形”上读取数据的时候存在的误差,也可能是计算机精度方面的误差。
自动控制原理实验报告
自动控制原理实验报告 Final revision on November 26, 2020实验报告课程名称: 自动控制原理 实验项目: 典型环节的时域相应 实验地点: 自动控制实验室实验日期: 2017 年 3 月 22 日 指导教师: 乔学工实验一 典型环节的时域特性一、实验目的1.熟悉并掌握TDN-ACC+设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃相应曲线和实际阶跃响应曲线。
对比差异,分析原因。
3.了解参数变化对典型环节动态特性的影响。
二、实验设备PC 机一台,TD-ACC+(或TD-ACS)实验系统一套。
三、实验原理及内容下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。
1.比例环节 (P) (1)方框图 (2)传递函数:K S Ui S Uo =)()((3)阶跃响应:)0()(≥=t K t U O 其中 01/R R K =(4)模拟电路图:(5)理想与实际阶跃响应对照曲线: ① 取R0 = 200K ;R1 = 100K 。
② 取R0 = 200K ;R1 = 200K 。
2.积分环节 (I) (1)方框图(2)传递函数:TSSUiSUo1)()(=(3)阶跃响应:)0(1)(≥=ttTtUo其中CRT=(4)模拟电路图(5) 理想与实际阶跃响应曲线对照:①取R0 = 200K;C = 1uF。
②取R0 = 200K;C = 2uF。
3.比例积分环节 (PI)(1)方框图:(2)传递函数:(3)阶跃响应:(4)模拟电路图:(5)理想与实际阶跃响应曲线对照:①取 R0 = R1 = 200K;C = 1uF。
理想阶跃响应曲线实测阶跃响应曲线无穷②取 R0=R1=200K ;C=2uF 。
理想阶跃响应曲线 实测阶跃响应曲线4.惯性环节 (T) (1) 方框图 (2) 传递函数:1)()(+=TS KS Ui S Uo 。
自动控制原理实验-系统频率特性的测量与分析-推荐下载
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电通,力1根保过据护管生高线产中0不工资仅艺料可高试以中卷解资配决料置吊试技顶卷术层要是配求指置,机不对组规电在范气进高设行中备继资进电料行保试空护卷载高问与中题带资2负料2,荷试而下卷且高总可中体保资配障料置2试时32卷,3各调需类控要管试在路验最习;大题对限到设度位备内。进来在行确管调保路整机敷使组设其高过在中程正资1常料中工试,况卷要下安加与全强过,看度并25工且52作尽22下可护都能1关可地于以缩管正小路常故高工障中作高资;中料对资试于料卷继试连电卷接保破管护坏口进范处行围理整,高核或中对者资定对料值某试,些卷审异弯核常扁与高度校中固对资定图料盒纸试位,卷置编工.写况保复进护杂行层设自防备动腐与处跨装理接置,地高尤线中其弯资要曲料避半试免径卷错标调误高试高等方中,案资要,料求编试技5写、卷术重电保交要气护底设设装。备备置管4高调、动线中试电作敷资高气,设料中课并技3试资件且、术卷料中拒管试试调绝路包验卷试动敷含方技作设线案术,技槽以来术、及避管系免架统不等启必多动要项方高方案中式;资,对料为整试解套卷决启突高动然中过停语程机文中。电高因气中此课资,件料电中试力管卷高壁电中薄气资、设料接备试口进卷不行保严调护等试装问工置题作调,并试合且技理进术利行,用过要管关求线运电敷行力设高保技中护术资装。料置线试做缆卷到敷技准设术确原指灵则导活:。。在对对分于于线调差盒试动处过保,程护当中装不高置同中高电资中压料资回试料路卷试交技卷叉术调时问试,题技应,术采作是用为指金调发属试电隔人机板员一进,变行需压隔要器开在组处事在理前发;掌生同握内一图部线纸故槽资障内料时,、,强设需电备要回制进路造行须厂外同家部时出电切具源断高高习中中题资资电料料源试试,卷卷线试切缆验除敷报从设告而完与采毕相用,关高要技中进术资行资料检料试查,卷和并主检且要测了保处解护理现装。场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
【实验报告】频率响应测试

实验名称:频率响应测试课程名称:自动控制原理实验目录(一)实验目的3(二)实验内容3(三)实验设备3(四)实验原理4(五)K=2频率特性试验结果4(六)K=2频率特性试验数据记录及分析7(七)K=5频率特性试验结果9(八)K=5频率特性试验数据记录及分析12(九)实验总结及感想错误!未定义书签。
图片目录图片1 系统结构图3图片2 系统模拟电路3图片3 K=2仿真对数幅相特性曲线4图片4 K=5仿真对数幅相特性曲线4图片5 f=0.7时输出波形及李沙育图形5图片6 f=1.4时输出波形及李沙育图形5图片7 f=2.1时输出波形及李沙育图形5图片8 f=2.8时输出波形及李沙育图形5图片9 f=3.5时输出波形及李沙育图形6图片10 f=4.2时输出波形及李沙育图形6图片11 f=4.9时输出波形及李沙育图形6图片12 f=5.6时输出波形及李沙育图形6图片13 f=6.3时输出波形及李沙育图形7图片14 f=7.0时输出波形及李沙育图形7图片15 k=2拟合频率特性曲线9图片16 f=0.9波形及李沙育图形9图片17 f=1.8波形及李沙育图形10图片18 f=2.7波形及李沙育图形10图片19 f=3.6波形及李沙育图形10图片20 f=4.5波形及李沙育图形10图片21 f=5.4波形及李沙育图形11图片22 f=6.3波形及李沙育图形11图片23 f=7.2形及李沙育图形11图片24 f=8.1波形及李沙育图形11图片25 f=9.0波形及李沙育图形12图片26 k=2拟合相频特性曲线14图表目录表格1 K=2电路元件参数7表格2 K=2实测电路数据处理7表格3 K=5电路元件参数12表格4 K=5实测电路数据处理12频率响应测试(一) 实验目的1. 掌握频率特性的测试原理及方法。
2. 学习根据所测定出的系统的频率特性,确定系统传递函数的方法。
(二) 实验内容测定给定环节的的频率特性,系统模拟电路、结构图分别如下所示:图片1系统结构图由图可知,系统的传递函数为:2100()10100k G s s s k =++,其中1Rk R =,实验中R 的取值分别为200k Ω,500k Ω,且1R 始终为100k Ω。
自动控制原理实验报告 (频率特性测试)
自动控制原理实验报告(三)
频率特性测试
一.实验目的
1.了解线性系统频率特性的基本概念。
2.了解和掌握对数幅频曲线和相频曲线(波德图)的构造及绘制方法。
二.实验内容及步骤
被测系统是一阶惯性的模拟电路图见图3-2-1,观测被测系统的幅频特性和相频特性,填入实验报告。
本实验将正弦波发生器(B4)单元的正弦波加于被测系统的输入端,用虚拟示波器观测被测系统的幅频特性和相频特性,了解各种正弦波输入频率的被测系统的幅频特性和相频特性。
图3-2-1 被测系统的模拟电路图
实验步骤:
(1)将函数发生器(B5)单元的正弦波输出作为系统输入。
(2)构造模拟电路。
三.实验记录:
ω
ω=1
ω=1.6
ω=3.2
ω=4.5
ω=6.4
ω=8
ω=9.6
ω=16
实验分析:
实验中,一阶惯性环节的幅频特性)(ωL ,相频特性)(ωϕ随着输入频率的变化而变化。
惯性环节的时间常数T 是表征响应特性的唯一参数,系统时间常数越小,输出相应上升的越快,同时系统的调节时间越小。
自动控制原理实验报告-实验二频率响应测试

自动控制原理实验报告实验二频率响应测试实验一频率响应测试一、实验目的1. 掌握频率特性的测试原理及方法。
2. 学习根据所测定出的系统的频率特性,确定系统传递函数的方法。
二、实验内容1. 测定给定环节的频率特性系统模拟电路图及系统结构图分别如图2-1及图2-2,元件参数标注于模拟电路图中。
图2-1 系统模拟电路图图2-2 系统结构图系统传递函数为:取R=2R1=200KΩ时,则k=2,G(s)=200s2+10s+200取R=5R1=500KΩ时,则k=5,G(s)=500s2+10s+500输入正弦信号,在折转频率两侧适当范围内改变正弦信号频率,测量其稳态输出并记录数据。
2. 根据测定的系统频率特性,确定系统的传递函数根据所测得的系统频率特性数据,绘制系统的频率特性曲线,并确定系统的传递函数。
三、实验原理1.系统的频率特性若正弦输入信号为U i(t)=A1sin(ωt),则当输出达到稳态时,其输出信号为U o(t)=A2sin(ωt+ϕ)。
改变输入信号圆频率ω值,便可测得二组A2/A1和ϕ随ω变化的数值,这个变化规律就是系统的幅频特性和相频特性,即系统的频率特性。
2.测量系统幅频特性幅频特性即测量输入与输出信号幅值A1及A2,然后计算其比值A2/A1。
3. 测量系统相频特性实验采用“李沙育图形”法进行相频特性的测试,其测试原理如下:设有两个正弦信号X(ωt)=X m sin(ωt)Y(ωt)=Y m sin(ωt+ϕ)若以X(ωt)为横轴,Y(ωt)为纵轴,而以ω作为参变量,则随着ωt的变化,X(ωt)和Y(ωt)所确定的点的轨迹,将在 X-Y 平面上描绘出一条封闭的曲线。
这个图形就是物理学上所称的“李沙育图形”,如图2-3所示。
图2-3 李沙育图形相位差角ϕ的求法:对于X(ωt)=X m sin(ωt)及Y(ωt)=Y m sin(ωt+ϕ),当ωt=0时,有X(0)=0,Y(0)=Y0=Y m sinϕ。
自动控制原理实验报告实验二-频率响应测试
自动控制原理实验报告实验二-频
率响应测试
自动控制原理实验报告实验二-频率响应测试是一个实验,用于测试一个系统的频率响应。
它包括了数学模型的描述,实验处理装置的设计,以及实验结果的分析。
实验前,我们需要对系统的频率响应特性进行数学模型分析,来确定具体实验中参数的取值,如时间常数、截止频率和放大器带宽等。
在实验中,根据实验要求,我们设计了一套实验处理装置,由PC机,通道放大器,放大器反馈回路,传感器,相应示波器以及控制软件组成。
在实验中,我们采用正弦信号作为输入,通过PC机的控制软件调节信号的频率和幅值,然后将信号输入到放大器中,放大器放大信号,输出到反馈回路中,反馈回路中的传感器检测反馈信号,将反馈信号输出到PC机,再通过相应示波器显示出来,以便观察系统的响应。
在实验中,我们对频率响应进行了测试,首先,我们使用定时器设置不同频率的正弦信号作为输入,观察系统的频率响应特性,并记录响应曲线;其次,我们使用扫频器模拟正弦信号,以每个正弦信号的频率进行不同振幅的扫描,观察系统的响应特性,并记录响应曲线;最后,我
们使用控制软件对系统进行调整,以提高系统的响应能力,并记录响应曲线。
实验结束后,我们对实验结果进行了分析,并将系统的频率响应与理论值进行比较,以验证实验结果的准确性。
根据分析结果,我们得出结论:系统的频率响应符合理论值,控制软件的调整有效提高了系统的响应能力。
总之,自动控制原理实验报告实验二-频率响应测试是一个有益的实验,它不仅帮助我们更好地了解系统的频率响应特性,而且也可以帮助我们更好地控制系统,以提高系统的响应能力。
自动控制原理实验报告
自动控制原理实验报告实验报告:自动控制原理一、实验目的本次实验的目的是通过设计并搭建一个简单的自动控制系统,了解自动控制的基本原理和方法,并通过实际测试和数据分析来验证实验结果。
二、实验装置和仪器1. Arduino UNO开发板2.电机驱动模块3.直流电机4.旋转角度传感器5.杜邦线6.电源适配器三、实验原理四、实验步骤1. 将Arduino UNO开发板与电机驱动模块、旋转角度传感器和直流电机进行连接。
2. 编写Arduino代码,设置电机的控制逻辑和旋转角度的反馈机制。
3. 将编写好的代码上传至Arduino UNO开发板。
4.将电源适配器连接至系统,确保实验装置正常供电。
5.启动实验系统并观察电机的转动情况。
6.记录电机的转动角度和实际目标角度的差异,并进行数据分析。
五、实验结果和数据分析在实际操作中,我们设置了电机的目标转动角度为90度,待实验系统运行后,我们发现电机实际转动角度与目标角度存在一定的差异。
通过对数据的分析,我们发现该差异主要由以下几个方面导致:1.电机驱动模块的响应速度存在一定的延迟,导致电机在到达目标角度时出现一定的误差。
2.旋转角度传感器的精度有限,无法完全准确地测量电机的实际转动角度。
这也是导致实际转动角度与目标角度存在差异的一个重要原因。
3.电源适配器的稳定性对电机的转动精度也有一定的影响。
六、实验总结通过本次实验,我们了解了自动控制的基本原理和方法,并通过实际测试和数据分析了解了自动控制系统的运行情况。
同时,我们也发现了实际系统与理论预期之间存在的一些差异,这些差异主要由电机驱动模块和旋转角度传感器等因素引起。
为了提高自动控制系统的精度,我们需要不断优化和改进这些因素,并进行相应的校准和调试。
实验的结果也提醒我们,在实际应用中,需要考虑各种因素的影响,以确保自动控制系统的可靠性和准确性。
自动控制理论实验报告-频率特性分析
实验报告
编号:
频率特性分析
实验报告
学生姓名 专 班 学 日 业 级 号 期
0
频率特性分析
实验报告
自动控制理论
频率特性分析实验报告
一、实验目的
1.掌握频率特性的基本概念,尤其是频率特性的几种表示方法; 2.能熟练绘制极坐标频率特性曲线(奈奎斯特曲线)和对数频率特性曲线, 尤其要注意的是在非最小相位系统时曲线的绘制; 3.正确应用频率稳定判别方法,包括奈奎斯特稳定判据和对数稳定判据; 4.熟练正确计算相位裕量和幅值裕量; 5.掌握闭环频率特性的基本知识以及有关指标的近似估算方法。
三、实验结果
1.增加开环传函零极点个数对
图 3.1
2
频率特性分析
实验报告
奈奎斯特图的影响。 (1)奈奎斯特图如图 3.1 所示。随着开环极点个数的增加,奈氏图将越过 虚轴,与实轴的交点向左偏移,穿越实轴负半轴的次数也在改变。 (2)当 v=1,2,3,4,5,6 时的奈奎斯特图分别如图 3.2(a)~(f)所示。由图可 知, 即使只增加一个零极点, 奈氏曲线都将达到无穷远处, 而且每增加一个极点, 奈氏曲线将顺时针旋转近似 90°。
(a)图 3.7
(b)
4.闭环频率特性与系统动态性能的关系。 式(2-4)中,当 0.3 ,0.5,0.7 时的系统阶跃响应分别如图 3.8(a) (b) (c)所示。由图可知,随着阻尼比 ζ 的增大,峰值减小,响应时间缩短,系统 由欠阻尼状态过渡到临界阻尼状态。
5
频率特性分析
实验报告
(a) 0.3
G1 s H 1 s G2 s H 2 s
255 s 1 s 2 s 3 s 4 s 255 s 1 s 2 s 3 s 4 s
自动控制原理实验-控制系统频率特性的测试

(13)当ω=10.1rad/s时,2Xm= 2 2Ym=2 0.03461 = -29.21 2y0=2 0.02182ψ= 180- = 140.92°绕行方向:顺时针如下图
图十三
(14)当ω=10.2rad/s时,2Xm= 2 2Ym=2 0.03394 = -29.39 2y0=2 0.02141ψ= 180- =140.89°绕行方向:顺时针如下图
图二
(3)当ω=0.98rad/s时,2Xm= 2 2Ym=2 5.178 = 14.28 2y0=2 5.067ψ= = 78.11°绕行方向:逆时针如下图
图三
(4)当ω=0.99rad/s时,2Xm= 2 2Ym=2 4.428 = 12.92 2y0=2 4.226ψ= = 72.627°绕行方向:逆时针如下图
以下是在不同频率下李沙育图及幅频特性和相频特性的分析情况
(1)当ω=0.5rad/s时,2Xm= 2 2Ym=2 5.515Байду номын сангаас= 14.83 2y0=2 3.3ψ= = 36.75°绕行方向:逆时针如下图
图一
(2)当ω=0.7rad/s时,2Xm= 2 2Ym=2 5.727 = 15.16 2y0=2 4.879ψ= = 58.42°绕行方向:逆时针如下图
答:频率特性可以用于稳定系统也可以用于不稳定系统。频率特性也是系统数学模型的一种,可用多种形式的曲线表示,因此系统分析和控制器设计可以应用图解法进行。频率特性的物理意义明确,不仅适用于线性定常系统,还可推广至某些非线性控制系统。
5、实验总结
(1)通过本次实验认识了线性定常系统的频率特性,掌握了用频率特性法测试被控过程模型的原理和方法,根据开环系统的对数频率特性,确定了系统组成环节的参数。
自动控制原理-控制系统的频率特性实验报告
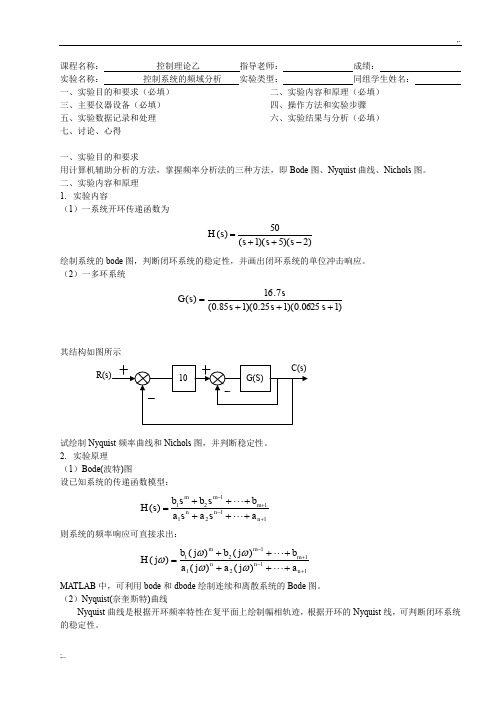
肇庆学院工程学院 自动控制原理实验报告_12 _年级_ 电气一班 组员:王园园、李俊杰 实验日期 2014/6/9 姓名:李奕顺 学号:2130 老师评定___________ 实验四:控制系统的频率特性一、实验原理1.被测系统的方块图:见图4-1图4-1 被测系统方块图系统(或环节)的频率特性G (j ω)是一个复变量,可以表示成以角频率ω为参数的幅值和相角:) G(j ω) G(j ω) G(j ω= (4—1)本实验应用频率特性测试仪测量系统或环节的频率特牲。
图4-1所示系统的开环频率特性为:) E(j ω) B(j ω)E(j ω)B(j ω) E(j ω) B(j ω) (j ωG ) (j ωG 21==⋅(4—2)采用对数幅频特性和相频特性表示,则式(4—2)表示为:)E(j ω)B(j ωlg20) )H(j ω (j ωG ) (j ωG 20lg 21=⋅) E(j ωlg 20) B (j ωlg 20-= (4—3)) E(j ω) B(j ω)E(j ω)B(j ω) H(j ω) (j ωG ) (j ωG 21-==(4—4)将频率特性测试仪内信号发生器产生的超低频正弦信号的频率从低到高变化,并施加于被测系统的输人端[r(t)],然后分别测量相应的反馈信号[b(t)]和误差信号[e(t)]的对数幅值和相位。
频率特性测试仪测试数据经相关运算器后在显示器中显示。
根据式(4—3)和式(4—4)分别计算出各个频率下的开环对数幅值和相位,在半对数座标纸上作出实验曲线:开环对数幅频曲线和相频曲线。
根据实验开环对数幅频曲线画出开环对数幅频曲线的渐近线,再根据渐近线的斜率和转角频确定频率特性(或传递函数)。
所确定的频率特性(或传递函数)的正确性可以由测量的相频曲线来检验,对最小相位系统而言,实际测量所得的相频曲线必须与由确定的频率特牲(或传递函数)所画出的理论相频曲线在一定程度上相符,如果测量所得的相位在高频(相对于转角频率)时不等于- 90°(q-p)[式中p和q分别表示传递函数分子和分母的阶次],那么,频率特性(或传递函数)必定是一个非最小相位系统的频率特性。
控制系统的频域分析实验报告
课程名称: 控制理论乙 指导老师: 成绩: 实验名称: 控制系统的频域分析 实验类型: 同组学生姓名: 一、实验目的和要求(必填) 二、实验内容和原理(必填) 三、主要仪器设备(必填) 四、操作方法和实验步骤 五、实验数据记录和处理 六、实验结果与分析(必填) 七、讨论、心得一、实验目的和要求用计算机辅助分析的方法,掌握频率分析法的三种方法,即Bode 图、Nyquist 曲线、Nichols 图。
二、实验内容和原理 1. 实验内容(1)一系统开环传递函数为)2)(5)(1(50)(-++=s s s s H绘制系统的bode 图,判断闭环系统的稳定性,并画出闭环系统的单位冲击响应。
(2)一多环系统)10625.0)(125.0)(185.0(7.16)(+++=s s s ss G其结构如图所示试绘制Nyquist 频率曲线和Nichols 图,并判断稳定性。
2. 实验原理(1)Bode(波特)图设已知系统的传递函数模型:11211121)(+-+-+⋅⋅⋅+++⋅⋅⋅++=n n n m m m a s a s a b s b s b s H 则系统的频率响应可直接求出:11211121)()()()()(+-+-+⋅⋅⋅+++⋅⋅⋅++=n n n m m m a j a j a b j b j b j H ωωωωω MATLAB 中,可利用bode 和dbode 绘制连续和离散系统的Bode 图。
(2)Nyquist(奈奎斯特)曲线Nyquist 曲线是根据开环频率特性在复平面上绘制幅相轨迹,根据开环的Nyquist 线,可判断闭环系统的稳定性。
反馈控制系统稳定的充要条件是,Nyquist曲线按逆时针包围临界点(-1,j0)p圈,为开环传递函数位于右半s一平面的极点数。
在MA TLAB中,可利用函数nyquist和dnyquist绘出连续和离散系统的乃氏曲线。
(3)Nicho1s(尼柯尔斯)图根据闭环频率特性的幅值和相位可作出Nichols图,从而可直接得到闭环系统的频率特性。
控制理论实验报告 频率特性的测量
实验报告课程名称:控制理论(乙)指导老师:成绩:__________________实验名称:频率特性的测量实验类型:________________同组学生姓名:__________ 一、实验目的和要求(必填)二、实验内容和原理(必填)三、主要仪器设备(必填)四、操作方法和实验步骤五、实验数据记录和处理六、实验结果与分析(必填)七、讨论、心得一、实验目的1.掌握用李沙育图形法,测量各典型环节的频率特性;2.根据所测得的频率特性,做出波特图,据此求得环节的传递函数;二、实验仪器设备1.控制理论电子模拟实验箱一台;2.双踪慢扫描示波器一台;3.万用表一只。
三、实验原理对于稳定的线性定常系统或环节,当其输入端加入一正弦信号X(t)Xmsin tω=,它的稳态输出是一与输入信号同频率的正弦信号,但其幅值和相位将随着输入信号频率ω的变化而变化,即输出信号Y(t)Ymsin(t)ωϕ=+,其中YmG(j)Xmω=,(j)argG(j)ϕωω=只要改变输入信号X(t)的频率ω,就可测得输出信号与输入信号的幅值比和它们的相位差。
不断改变X(t)的频率,就可测得被测环节(系统)的幅频特性G(j)ω和相频特性(j)ϕω。
本实验采用李沙育图形法,测试方框图如下:下表列出了超前与滞后相位的计算公式和光点的转向2Y0为椭圆与Y轴交点之间的长度,2X0为椭圆与X轴交点之间距离,Ym与Xm分别为X(t)和Y(t)的幅值四、实验内容1.测量微分积分环节的频率特性;分别测试其相频特性和幅频特性2.测量二阶系统的闭环频率特性二阶系统的方框图如图所示。
五、测量结果与分析1.微分积分环节的频率特性幅频特性相频特性实验结果分析:将实验选择的参数代入计算得理论值2221211Rj cH(j)11R Rj c j cωωωω+=++=27271011000j1021000jωωωω-++-++实验值与理论值的仿真结果基本吻合,但仍存在一定误差主要误差来源分析:从李萨如图形上读取数据时存在较大误差,图像不停的闪动,且由于最小刻度较大,不能完全把图像置于示波器的中间,导致示波器读数时存在偏差2.测量二阶系统的闭环频率特性实验接线图如下R0=200kΩ R1=410kΩ C1=1μF R2=510kΩ C2=1μF R3=100kΩ实验结果分析:根据所选实验参数,算出开环传递函数4.02G(s)s(0.41s1)=+,利用MATLAB进行仿真,结果如下实验结果与理论值的仿真结果基本吻合,但仍存在一定误差主要误差来源分析:1.示波器读取幅值的时候有视差;2.电阻及电容等原件非理想原件,存在误差;3.测量数据点有限,存在一定误差;4.输入信号不稳定,在不同频率下可能幅度有所波动五、讨论与心得1.在实验中如何选择输入正弦信号的幅值?先将频率调到很大,再是信号幅值应该调节信号发生器的信号增益按钮,令示波器的显示方式为信号-时间模式,然后观测输出信号,调节频率,观察在各个频段是否失真。
控制系统的频率特性分析报告
实验六 控制系统的频率特性分析1.已知系统传递函数为:12.01)(+=s s G ,要求: (1) 使用simulink 进行仿真,改变正弦输入信号的频率,用示波器观察输出信号,记录不同频率下输出信号与输入信号的幅值比和相位差,即可得到系统的幅相频率特性。
F=10时输入: 输出:F=50时输入:输出:(2)使用Matlab函数bode()绘制系统的对数频率特性曲线(即bode图)。
提示:a)函数bode()用来绘制系统的bode图,调用格式为:bode(sys)其中sys为系统开环传递函数模型。
参考程序:s=tf(‘s’);%用符号表示法表示sG=1/(0.2*s+1);%定义系统开环传递函数bode(G) %绘制系统开环对数频率特性曲线(bode图)实验七连续系统串联校正一.实验目的1.加深理解串联校正装置对系统动态性能的校正作用。
2. 对给定系统进行串联校正设计,并通过matlab实验检验设计的正确性。
二.实验内容1.串联超前校正系统设计要求见课本例题6-3,要求设计合理的超前校正环节,并完成以下内容用matlab画出系统校正前后的阶跃相应,并记录系统校正前后的超调量及调节时间num=10;1)figure(1)2)hold on3)figure(1)4)den1=[1 1 0];5)Gs1=tf(num,den1);6)G1=feedback(Gs1,1,-1);7)Step(G1)8)9)k=10;10)figure(2)11)GO=tf([10],[1,1,0]);12)Gc=tf([0.456,1],[1,00114]);13)G=series(G0,Gc);14)G1=feedback(G,1);15)step(G1);grid2)使用Matlab函数bode()绘制系统的对数频率特性曲线,记录系统校正前后的幅值裕度和相角裕度。
k=1/0.1;G0=zpk([],[0 -1],k);[h0,r,wx,wc]=margin(G0);wm=4.4;L=bode(G0,wm);Lwc=20*log10(L);a=10^(-0.1*Lwc);T=1/(wm*sqrt(a));phi=asin((a-1)/(a+1));Gc=(1/a)*tf([a*T 1],[T 1]);Gc=a*Gc;G=Gc*G0;bode(G,'r',G0,'b--');grid;[h,r,wx,wc]=margin(G)2.串联滞后校正系统设计要求见课本例题6-4,要求按题目要求设计合理的滞后校正环节,并完成以下内容1)用matlab画出系统校正前后的阶跃相应,并记录系统校正前后的超调量及调节时间2)使用Matlab函数bode()绘制系统的对数频率特性曲线,记录系统校正前后的幅值裕度和相角裕度。
控制系统的频率特性研究

实验七 控制系统的频率特性研究(Matlab )一、实验目的1.通过实验,进一步理解控制系统频域分析的概念。
2.学会用Matlab 软件绘制系统的Nypuist 图和Bode 图,根据图形曲线分析系统的稳定性。
二、实验设备1. THBCC-1型 信号与系统•控制理论及计算机控制技术实验平台;2. PC 机一台(含“THBCC-1”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验内容1.用Matlab 软件绘制给定模型的Nypuist 图和Bode 图。
(1))18)(1()110(10)(1+++=S S S S s G (2))1)(16(50)(222+++=S S S S s G(3)125.012)(2323+++++=S S S S S s G 2.利用Nypuist 图和Bode 图对系统的稳定性进行分析。
3.由Bode 图求取系统的相角裕度和幅值裕度。
四、实验数据或曲线模型一的源程序及波形:>> num=[100 10];den=[8 9 1 0];g=tf(num,den)Transfer function: 100 s + 10 ----------------- 8 s^3 + 9 s^2 + s>> nyquist(g)>> bode(g)>> margin(g)>> [gm,pm,weg,wep]=margin(g)gm =Infpm =16.5111weg =Infwep =3.4650模型二的源程序及波形:>> num=[50];den=[6 7 7 1 0];g=tf(num,den)Transfer function:50-------------------------6 s^4 +7 s^3 + 7 s^2 + s>> nyquist(g)>> Bode(g)>> margin(g)>> [gm,pm,weg,wep]=margin(g) Warning: The closed-loop system is unstable. > In lti.margin at 89gm =0.0175pm =-134.2566weg =0.3779wep =1.7503模型三的源程序及波形:>> num=[1 2 1];den=[1 0.25 1 1];g=tf(num,den)Transfer function:s^2 + 2 s + 1----------------------s^3 + 0.25 s^2 + s + 1>> Nyquist(g)Warning: Function call Nyquist invokes inexact match C:\MATLAB7\toolbox\control\control\@lti\nyquist.m.>> Bode(g)Warning: Function call Bode invokes inexact match C:\MATLAB7\toolbox\control\control\@lti\bode.m.>> Margin(g)Warning: Function call Margin invokesinexactmatchC:\MATLAB7\toolbox\control\control\@lti\margin.m.>> [Gm,Pm,Weg,Wep]=Margin(g) Gm =0.5002 Pm =30.8986 Weg =1.4144 Wep =1.8388五、实验结论1、模型一的系统稳定性分析由模型一的Nyquist 图及奈氏判据可得:开环极点在S 右半平面的个数为零,即P=0,又包围(-1,j0)的圈数为零,即N=0,所以有Z=P-2N=0,所以该系统稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
肇庆学院
工程学院 自动控制原理实验报告 12 年级 电气一班
组员:王园园、李俊杰
实验日期
2014/6/9
姓名:李奕顺 学号:201224122130老师评定 ________________
实验四:控制系统的频率特性
一、实验原理
1.被测系统的方块图:见图4-1
将频率特性测试仪内信号发生器产生的超低频正弦信号的频率从低到高变化, 并施加于
被测系统的输人端[r(t)],然后分别测量相应的反馈信号 [b(t)]和误差信号[e(t)]的对数幅 值和
相位。
频率特性测试仪测试数据经相关运算器后在显示器中显示。
根据式(4 — 3)和式(4 — 4)分别计算出各个频率下的开环对数幅值和相位, 在半对数座标
纸上作出实验曲线:开环对数幅频曲线和相频曲线。
系统(或环节)的频率特性 幅值和相角:
G (j 3)是一个复变量,可以表示成以角频率
3为参数的
G(j 3)= G(j 3)|/G(j 3)
(4 — 1)
本实验应用频率特性测试仪测量系统或环节的频率特牲。
图4-1所示系统的开环频率特性为:
G 1(j 3)G 2(j 3)
B(j 3) 」
B(j 3)
E(j 3) E(j 3) E(j 3)
(4—2)
采用对数幅频特性和相频特性表示,则式(
20lgG1(j 3) G2(j 3)H(j 3)=
2
叫鵲
= 20lgB(j 3) -20lg E(j 3)
(4— 3)
G 1(j 3)G 2(j 3)H(j 3)
二
B(j 3)- . E(j 3)
(4—4)
图4-1 被测系统方块图
4— 2 )表示
为:
根据实验开环对数幅频曲线画出开环对数幅频曲线的渐近线,再根据渐近线的斜率和转
角频确定频率特性(或传递函数)。
所确定的频率特性(或传递函数)的正确性可以由测量的相频曲线来检验,对最小相位系统而言,实际测量所得的相频曲线必须与由确定的频率特牲(或传递函数)所画出的理论相频曲线在一定程度上相符,如果测量所得的相位在高频
(相
对于转角频率)时不等于-90 ° (q —p)[式中p和q分别表示传递函数分子和分母的阶次], 那么,频率特性(或传递函数)必定是一个非最小相位系统的频率特性。
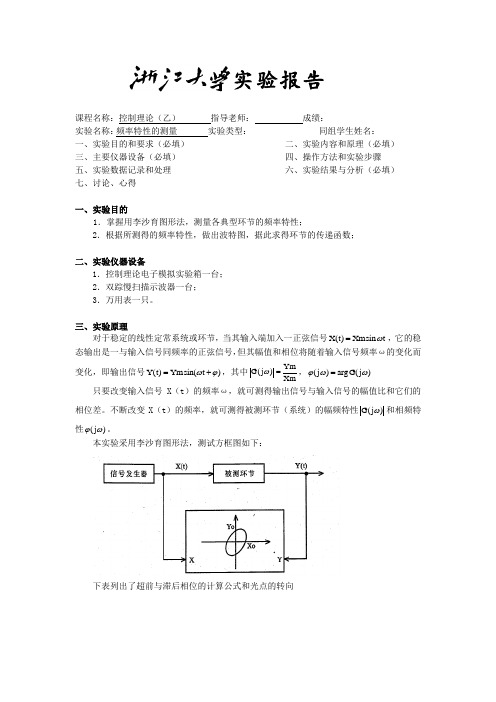
2.被测系统的模拟电路图:见图4-2
图4-2被测系统
二、实验内容
(1)将U21 DAC单元的OUT端接到对象的输入端。
⑵将测量单元的CH1 (必须拨为乘I档)接至对象的输出端。
⑶将Ul SG单元的ST和S端断开,用排线将ST端接至U26控制信号单元中的PB0。
(由于在每次测量前,应对对象进行一次回零操作,ST即为对象锁零控制端,在这里,我们用8255的PB0 口对ST进行程序控制)
⑷在PC机上分别输入角频率为1, 10,100,300,并使用“ +”、“―”键选择合适的幅值,按ENTER键后,输入的角频率开始闪烁,直至测量完毕时停止,屏幕即显示所测对象的输出及信号源,移动游标,可得到相应的幅值和相位,得到的实验波形图如图4-3到图4-10所示:
图4-3输入频率为1的波形图1
图4-4输入频率为1的波形图2
图4-5输入频率为10的波形图1
图4-6输入频率为10的波形图2
图4-7输入频率为100的波形图1
工1圧匚丨*韦増> »
图4-8输入频率为100的波形图2 K CiC W 嬉
图4-10输入频率为300的波形图2
三、实验数据整理
1、由实验波形图如图4-3到图4-10的数据可以计算得出表4-1 :。