PWM 控制技术
PWM控制技术

PWM控制技术1.试说明 PWM 控制的基本原理。
答:PWM 控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
在采样控制理论中有一条重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同,冲量即窄脉冲的面积。
效果基本相同是指环节的输出响应波形基本相同。
上述原理称为面积等效原理以正弦 PWM 控制为例。
把正弦半波分成N 等份,就可把其看成是N 个彼此相连的脉冲列所组成的波形。
这些脉冲宽度相等,都等于π/N,但幅值不等且脉冲顶部不是水平直线而是曲线,各脉冲幅值按正弦规律变化。
如果把上述脉冲列利用相同数量的等幅而不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就得到 PWM 波形。
各 PWM 脉冲的幅值相等而宽度是按正弦规律变化的。
根据面积等效原理,PWM 波形和正弦半波是等效的。
对于正弦波的负半周,也可以用同样的方法得到 PWM 波形。
可见,所得到的 PWM 波形和期望得到的正弦波等效2. 单极性和双极性 PWM 调制有什么区别?三相桥式 PWM 型逆变电路中,输出相电压(输出端相对于直流电源中点的电压)和线电压 SPWM 波形各有几种电平?答:三角波载波在信号波正半周期或负半周期里只有单一的极性,所得的 PWM 波形在半个周期中也只在单极性范围内变化,称为单极性 PWM 控制方式。
三角波载波始终是有正有负为双极性的,所得的 PWM 波形在半个周期中有正、有负,则称之为双极性 PWM 控制方式。
三相桥式 PWM 型逆变电路中,输出相电压有两种电平:0.5U d和-0.5 U d。
输出线电压有三种电平U d、0、- U d。
3.特定谐波消去法的基本原理是什么?设半个信号波周期内有 10 个开关时刻(不含0 和p 时刻)可以控制,可以消去的谐波有几种?答:首先尽量使波形具有对称性,为消去偶次谐波,应使波形正负两个半周期对称,为消去谐波中的余弦项,使波形在正半周期前后 1/4 周期以p /2 为轴线对称。
四种pwm控制技术的原理
四种pwm控制技术的原理
PWM(Pulse Width Modulation,脉宽调制)是一种常用的数字控制技术,用于实现模拟信号的精确控制。
它通过改变信号的脉冲宽度来控制信号的平均电压或电流。
下面是四种常见的PWM控制技术及其原理:
1. 占空比控制:占空比是PWM信号高电平与周期之比。
通过改变占空比可以控制输出信号的平均电压或电流。
占空比越大,输出信号的平均电压或电流越大;占空比越小,输出信号的平均电压或电流越小。
这种方法简单易行,适用于许多应用场合。
2. 脉冲数改变:这种方法通过改变PWM信号每个周期中的脉冲数来控制输出信号的平均电压或电流。
脉冲数越多,输出信号的平均电压或电流越大;脉冲数越少,输出信号的平均电压或电流越小。
脉冲数改变时,周期保持不变。
这种方法常用于需要精确控制输出信号的平均电压或电流的应用。
3. 频率调制:这种方法通过改变PWM信号的频率来控制输出信号的平均电压或电流。
频率越高,输出信号的平均电压或电流越大;频率越低,输出信号的平均电压或电流越小。
输出的平均功率受频率的影响最小,可以实现高效的能量转换。
频率调制一般使用较高的固定占空比。
4. 相位移控制:这种方法通过改变PWM信号相位来控制输出信号的平均电压或电流。
相位移正比于输出信号的平均电压或电流。
相位移控制可以实现交流电源的电压或电流控制,广泛应用于电网有功功率控制和无功功率控制。
这四种PWM控制技术可以根据具体应用的需要选择合适的方式,以实现对输出信号的精确控制。
PWM的名词解释

PWM的名词解释PWM,即脉宽调制(Pulse Width Modulation),是一种在电子工程领域中常见的技术。
它在控制电子设备中功率输出以及速度调节等方面有着广泛应用。
一、什么是PWM?脉宽调制是一种控制技术,通过改变信号的脉冲宽度来控制电路输出的电平。
在PWM中,理论上电路输出总是以高低电平交替出现,但通过改变高电平和低电平之间的脉冲宽度,可以控制电路输出的平均电压或平均功率。
脉宽调制最常见的一种形式是矩形脉冲波,它由固定的周期和可调节的脉冲宽度组成。
脉冲宽度的调节可以在一定的周期内不断变化,从而实现对输出信号的控制。
二、PWM的原理PWM技术的核心原理是基于周期性的脉冲信号。
当脉冲的宽度增加时,电路输出的平均值也会相应增加。
换句话说,脉冲宽度越宽,输出的功率或电压就越高,而脉冲宽度越窄,输出的功率或电压就越低。
具体来说,PWM技术通过不断改变脉冲信号的高电平时间和低电平时间的比例来控制输出信号。
这样做的好处是可以在保证信号稳定性的前提下,精确地调节输出的平均电压或平均功率。
三、PWM的应用领域1. 电机控制:PWM技术广泛应用于电机控制领域。
通过改变PWM脉冲的宽度,可以调节电机的转速。
例如,调速风扇、电动车等就是利用PWM技术来控制电机转速的典型应用。
2. LED调光:PWM技术在LED照明领域也有重要应用,可以通过改变PWM 信号的脉冲宽度来控制LED灯的亮度。
这种方式相对于传统的电阻调光,具有更高的效率和更精确的调节范围。
3. 电源管理:PWM技术在电源管理中也扮演着重要角色。
通过PWM控制器可以实现高效、稳定的电源输出,弥补传统的线性稳压电路的不足。
4. 音频放大:PWM技术也常被应用于音频系统中。
通过控制PWM脉冲的宽度和频率,可以达到高保真度的音频放大效果。
四、PWM的优点与局限性1. 优点:- 精确控制:通过改变脉冲宽度和周期,可以实现对输出信号的精确控制,使其满足特定要求。
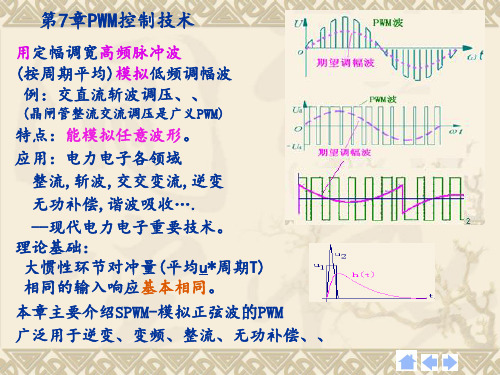
第6章PWM技术

由电机学,三相对称正 弦供电时: 总向量恒幅恒速旋转 (电)角速度:w 2f s 代表空间正弦分布且圆 转磁场,u s、es、is 是引用量
26
• 三相交流的空间向量
n=0:15;x=2*pi*n/16;a=2*pi/3;
v=cos(x)+cos(x+a)*exp(j*a) +cos(x-a)*exp(-j*a); plot(v)
16
除计算法和调制法外,还有 空间向量法 跟踪控制方法
17
6.2.2 异步调制和同步调制
载波比N = fc / fo----模拟uo一个周波的脉冲数 1) 异步调制----fc不变, N随fo变 载波与调制波不同步 N常≠整数 对称性差。 当fo较低时,N大------低频性能好。
当fo增高时,N小------高频差
u
ω1
u2Tc
32
空间矢量磁链控制 SVPWM
其它区域也有相应控制规则
SVPWM用电压向量u控制Ψ 沿折线围线,并走走停停逼近圆 开关频率越高,线元usTc越短 Ψ圆越准
33
空间矢量磁链控制 SVPWM
三电平逆变器 电压向量us更多 按ΔΨ=Ψ* - Ψ --用最佳us控制 Ψ圆更准
34
SVPWM波形特点
31
空间矢量磁链控制 SVPWM
--仿闭环控制算法 控制方程ΔΨs “=” usTc 按Ψ转向超前90度建u参考轴 u2 用u轴前后电压向量控制Ψ 例如图 矢量 作用 应用条件 u1 u1 正转增幅 Ψ滞后欠幅 u2 正转减幅 滞后超幅 u7,8 停转等待 超前 Ψ 例:Ψ滞后欠幅,用u1 u1Tc Ψ滞后超幅,用u2 Ψ超前,用u7,8 注”相邻原则”:u1u8; u2u7;可减少开关动作
pwm控制技术

调制 电路
单极性PWM控制方式(单相桥逆变) 单极性PWM控制方式(单相桥逆变) PWM控制方式
u uc ur
O
uo Ud
uo
O
-Ud
为正弦波, 调制信号ur为正弦波, 载波uc在ur的正半周为正极 性的三角波, 性的三角波,在负半周为负 ωt 极性的三角波 在ur和uc的交点时刻控制 IGBT的通断 IGBT的通断 uof ur正半周,V1保持通,V2 正半周, 保持通, 保持断 •当ur>uc时使V4通,V3断, 时使V 当 ωt u o= U d •当ur<uc时使V4断,V3通, 时使V 当 表示uo的基波分量4通, 如io<0,VD1和VD4通, 不管哪种情况uo=Ud
V1 + V2 VD 2 ur uc VD 1 R uo V3 L V4 VD4 VD 3
•
uo Ud uof uo
•
O
ωt
Ud
-Ud
信号波 载波
调制 电路
21
双极性PWM控制方式(单相桥逆变) 双极性PWM控制方式(单相桥逆变) PWM控制方式
7
冲量相同的各种窄脉冲的响应波形
PWM控制的基本原理 PWM控制的基本原理
1964年 德国A.Schonung A.Schonung率先提出了脉宽调制变频的思 1964年,德国A.Schonung率先提出了脉宽调制变频的思 交变压变频器的原理框图, 想。交—直—交变压变频器的原理框图, 直 交变压变频器的原理框图 逆变器的功率开关器件采用全控式器件, 逆变器的功率开关器件采用全控式器件,按一定规律控 制其导通或关断,使输出端获得一系列宽度不等 宽度不等的矩形脉 制其导通或关断,使输出端获得一系列宽度不等的矩形脉 冲电压波形。 冲电压波形。 通过改变脉冲的不同宽度可以控制逆变器输出交流基波 电压的幅值,通过改变调制周期可以控制其输出频率, 电压的幅值,通过改变调制周期可以控制其输出频率,从 8 而同时实现变压和变频。 而同时实现变压和变频。
pwm控制的工作原理

pwm控制的工作原理
PWM(脉宽调制)是一种控制信号的技术,它通过控制信号
的脉冲宽度的长短来实现对输出信号的调节。
PWM常用于控
制电机的速度、改变LED的亮度等电子设备中。
PWM的工作原理是根据输出信号的周期和脉冲宽度比例来控
制电路的开关状态。
具体步骤如下:
1. 设定周期:首先确定输出信号的周期,即一个完整的脉冲周期的时间。
2. 设定脉冲宽度:根据需要调节输出信号的幅度,即控制电路的开关状态的时间。
3. 脉冲生成:利用计时器或特殊的PWM芯片,根据设定的周
期和脉冲宽度来生成PWM信号。
4. 输出控制:将PWM信号通过电流放大器等电路输出给目标
设备,实现对设备的控制。
在PWM信号中,脉冲宽度占整个周期的比例决定了输出信号
的强度或工作状态。
脉冲宽度比例越大,输出信号越强;脉冲宽度比例越小,输出信号越弱。
优点是PWM控制方式可以实现模拟信号的输出,而不需要使
用模数转换器。
另外,由于脉冲宽度的变化可以通过改变开关频率来实现,因此PWM可以很好地适应不同频率范围的应用。
总之,PWM控制的工作原理是根据周期和脉冲宽度比例来控制输出信号的强度或工作状态,通过改变脉冲宽度比例来实现对电子设备的精确控制。
pwm控制原理

pwm控制原理
PWM(脉宽调制)是一种常用的控制技术,可以通过调节信号的脉冲宽度来控制电子设备的输出功率,其原理如下:
PWM的基本原理是通过改变信号的占空比来控制输出电压或电流的大小。
占空比是指脉冲高电平时间与一个周期的比值,通常用百分比表示。
在PWM控制的过程中,输入信号会被分为固定的多个周期,在每个周期内,根据设定的占空比来决定脉冲的高电平时间和低电平时间。
当占空比较大时,脉冲的高电平时间相对较长,输出电压或电流较大;当占空比较小时,脉冲的高电平时间相对较短,输出电压或电流较小。
PWM控制可以实现对输出信号的精确控制,具有输出功率调节范围广、开关损耗小、控制精度高等优点。
在电子设备中,尤其是电机控制领域,PWM控制被广泛应用。
在实际应用中,PWM控制需要通过微控制器或专用的PWM 控制芯片来实现。
这些控制器会根据外部输入的控制信号或算法,计算出对应的占空比,并产生相应的PWM信号。
PWM 信号经过功率放大电路放大后,驱动输出设备,实现对输出功率的调节。
需要注意的是,PWM控制的频率和占空比需要根据被控制设备的特性和需求进行合理选取。
频率较高可以减小输出的脉冲波形,提高控制精度;占空比较大可以获得更高的输出功率,
但也会增加开关损耗。
因此,在具体应用中,需要综合考虑设备特性、效率要求等因素,进行合理的PWM参数设计。
电力电子技术第七章PWM控制技术

5
7.2.1 计算法和调制法
■计算法 ◆根据逆变电路的正弦波输出频率、幅值和半个周期内
的脉冲数,将PWM波形中各脉冲的宽度和间隔准确计算出 来,按照计算结果控制逆变电路中各开关器件的通断,就可 以得到所需要的PWM波形,这种方法称之为计算法.
负载相电压的PWM波由±2/3Ud、±1/3Ud和0 共5种电平组成.
◆为了防止上下两个臂直通而造成短路,在上 图7-8 三相桥式PWM逆变电路波形 下两臂通断切换时要留一小段上下臂都施加
关断信号的死区时间.
12
7.2.1 计算法和调制法
图7-9 特定谐波消去法的输出PWM波形
■特定谐波消去法 ◆是计算法中一种较有代表性的方法. ◆如果在输出电压半个周期内开关器件开通和关断各k次,考虑到
◆在fr低的频段采用较高的载波比,以 使fc不致过低而对负载产生不利影响.
◆为了防止fc在切换点附近的来回跳 动,在各频率切换点采用了滞后切换的方 法.
◆有的装置在低频输出时采用异步调
制方式,而在高频输出时切换到同步调制 方式,这样可以把两者的优点结合起来, 和分段同步方式的效果接近.
19
7.2.3 规则采样法
高频段略有差异. ◆实例 ☞将图7-1a、b、c、d所示的脉冲作为输入,加在图7-2a所示的R-L
电路上,设其电流it为电路的输出,图7-2b给出了不同窄脉冲时it的响应波 形.
图7-1 形状不同而冲量相同的各种窄脉冲
图7-2 冲量相同的各种窄脉冲的响应波形
3
7.1 PWM控制的基本原理
■用PWM波代替正弦半波
(完整版)PWM控制技术(深度剖析)

第6章PWM控制技术主要内容:PWM控制的基本原理、控制方式与PWM波形的生成方法,PWM逆变电路的谐波分析,PWM整流电路。
重点:PWM控制的基本原理、控制方式与PWM波形的生成方法。
难点:PWM波形的生成方法,PWM逆变电路的谐波分析。
基本要求:掌握PWM控制的基本原理、控制方式与PWM波形的生成方法,了解PWM 逆变电路的谐波分析,了解跟踪型PWM逆变电路,了解PWM整流电路。
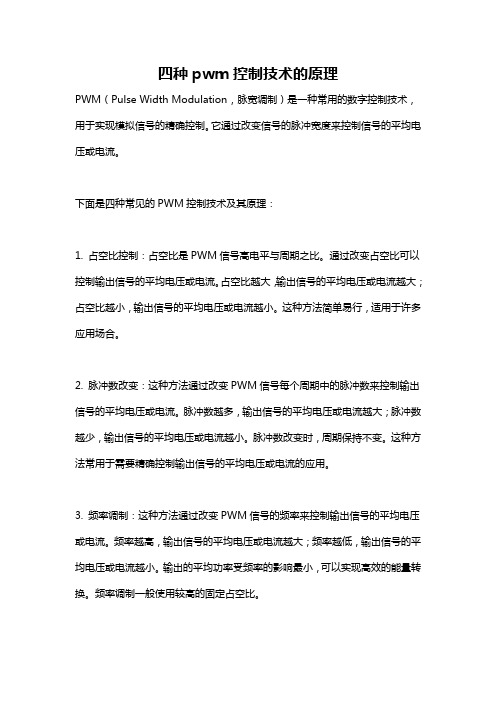
PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
第3、4章已涉及这方面内容: 第3章:直流斩波电路采用,第4章有两处:4.1节斩控式交流调压电路,4.4节矩阵式变频电路。
本章内容PWM控制技术在逆变电路中应用最广,应用的逆变电路绝大部分是PWM型,PWM 控制技术正是有赖于在逆变电路中的应用,才确定了它在电力电子技术中的重要地位。
本章主要以逆变电路为控制对象来介绍PWM控制技术,也介绍PWM整流电路1 PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图6-1 形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图6-1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图6-2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图6-2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图6-2 冲量相同的各种窄脉冲的响应波形用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
PWM控制技术
*提高输出电压,减少开关次数
如各相迭加up =-(三相ur基波最小值)-um
--三倍次谐波+直流 基波可提高15% 使线电压幅值达Ud 线参考电压-仍为正弦 各相基波有120°为最小值 此时ur为-um 对应电源相压持续为-Ud/2 且下臂开关保持导通
--开关动作减少,损耗减小
11
7.3 PWM (闭环)跟踪控制技术 --主要是电流跟踪
SVPWM
三电平逆变器 电压向量us更多 按ΔΨ=Ψ* - Ψ --用最佳us控制 Ψ圆更准
22
7.4 PWM整流电路
晶闸管/二极管整流问题: 谐波分量大,功率因数低。 PWM整流可控制交流侧电流波形(近正弦)与相位
可调有功与无功----高功率因数整流器、无功补偿器
单相PWM整流电路
Ls=外接电感+交流源电感------交流功率缓冲 C(C1,C2) ------直流功率缓冲
/
dt
r us
r is R
由电机学:对称交流时三相合成磁场“圆转”:
(幅值=(3/2)相幅值,电角速度=ω)
因r 此s 代表r s实, ur际s , er磁s , ir场s ,都而是旋urs转, ers的, irs 是引用量
空间位置任选
常选正转方向 (ab)顺时针
SVPWM--用PWM电路有限个状态的空间向量 urn
Ud>峰值√2UAB1 = √2Es/cosδ>峰值Usm
26
电流闭环控制单相PWM整流
电流给定is* : 相位与电源us相同, 幅值可调 用i滞环控制: is<is*-δ uAB = -Ud is↑
is>is*+δ uAB = +Ud is↓ 电路简单响应快; 交流电流有波纹可滤 调节is*幅值可调节Ud
电力电子技术_ PWM控制技术_三相PWM控制电路_

三相的调制信号urU、urV和urW依次相差120° 下面以U相为例进行分析:
控制规律
u
O
u UN'
第七章 脉宽调制(PWM)型逆变电路
1
一、概述
2
二、 PWM 控制的基本 原理
3
三、脉宽调 制型逆变电 路及其控制 方法
一、概述
❖PWM(Pulse Width Modulation)控制:
▪ 就是对脉冲宽度进行调制的技术。 ▪ 即通过对一系列脉冲的宽度进行调制,来等效
地获得所需要的波形(含形状和幅值)。 ❖ PWM控制的思想源于通信技术,全控型器件的发
• PWM波形可等效的各种波形
–直流斩波电路 –SPWM波
直流波形 正弦波形
–等效成其他所需波形,如:
20V
基于“面积等效原理”
0V -20V
0s
5ms
10ms
15ms
20ms
25ms
30ms
⚫ 所需波形
⚫ 等效的PWM波
三、脉宽调制型逆变电路及其控制方法
❖(一)产生PWM波形的方法 ❖计算法:
▪ 根据PWM的基本原理,如果给出了逆变电路的正 弦波输出频率、幅值和半个周期内的周波数, PWM波形中各脉冲的宽度和间隔就可以准确计算 出来。按照计算结果控制逆变电路中各开关器件的 通断,就可以得到所需要的PWM波形。
展使得实现PWM控制变得十分容易。 ❖ PWM技术的应用十分广泛,它使电力电子装置的
性能大大提高,因此它在电力电子技术的发展史 上占有十分重要的地位。
二、 PWM控制的基本原理 (一)面积等效原理 理论基础
冲量相等而形状不同的窄脉冲加在具有 惯性的环节上时,其效果基本相同。
第三章无刷直流电动机PWM控制方案

第三章无刷直流电动机PWM控制方案无刷直流电动机是目前应用广泛的电动机之一,其具有高效率、高功率密度和长寿命的特点。
PWM(Pulse Width Modulation)是一种常用的控制技术,可以实现对无刷直流电动机的精确控制。
本文将详细介绍PWM 控制方案在无刷直流电动机中的应用。
1.PWM控制原理PWM控制是通过调整开关器件的开通时间来控制电压的有效值,从而实现对无刷直流电动机的控制。
PWM控制的主要原理是将直流供电通过开关器件进行快速切换,使得电机得到一个等效的可调的直流电,从而实现对电动机的控制。
(1)基于单脉冲宽度调制(SPWM)的控制方案SPWM是一种常见的PWM调制技术,其基本思想是将待调制的模拟信号与一个高频的三角波进行对比,通过比较得到一个等效的PWM信号。
在无刷直流电动机中的应用,SPWM控制方案可以实现对电机的速度和转矩的控制。
(2)基于矢量控制的控制方案矢量控制是一种高级的PWM控制技术,可以实现对无刷直流电动机的精确控制。
它通过对电流矢量的调整来实现对电机的转速和转向的控制。
矢量控制具有较高的动态性能和响应速度,能够实现电机的高效运行。
(3)基于空间矢量调制(SVM)的控制方案SVM是一种高级的PWM调制技术,可以实现对无刷直流电动机的高精度控制。
它通过对电流矢量的调整来实现对电机的速度和转矩的控制。
SVM控制具有较高的输出电流质量,让电机运行更加稳定和高效。
3.PWM控制的优势(1)高效率:PWM控制可以实现对电机的高效率控制,可以根据需要调整输出电压和电流,从而使电机运行在最佳点。
(2)高精度:PWM控制可以实现对电机的精确控制,可以根据需要调整输出电压和电流的波形,从而实现对电机速度和转矩的精确控制。
(3)稳定性好:PWM控制可以减小电机的振动和噪声,从而使电机运行更加平稳和稳定。
4.PWM控制的应用(1)工业应用:PWM控制广泛应用于各类工业设备中,如机械加工、自动化生产线等,可以实现对电机的高精度控制,提高生产效率。
pwm控制技术

一、PWM控制技术在70年代开始至80年代初,由于当时大功率晶体管主要为双极性达林顿三极管,载波频率一般最高不超过5kHz,电机绕组的电磁噪音及谐波引起的振动引起人们的关注。
为求得改善,随机PWM方法应运而生。
其原理是随机改变开关频率使电机电磁噪音近似为限带白噪音(在线性频率坐标系中,各频率能量分布是均匀的),尽管噪音的总分贝数未变,但以固定开关频率为特征的有色噪音强度大大削弱。
正因为如此,即使在IGBT已被广泛应用的今天,对于载波频率必须限制在较低频率的场合,随机PWM仍然有其特殊的价值(DTC控制即为一例);别一方面则告诉人们消除机械和电磁噪音的最佳方法不是盲目地提高工作频率,因为随机PWM技术提供了一个分析、解决问题的全新思路。
在电力系统中,电压和电流应是完好的正弦波。
但是在实际的电力系统中,由于非线性负载的影响,实际的电网电压和电流波形总是存在不同程度的畸变,给电力输配电系统及附近的其它电气设备带来许多问题,因而就有必要采取措施限制其对电网和其它设备的影响。
随着电力电子技术的迅速发展,各种电力电子装置在电力系统、工业、交通、家庭等众多领域中的应用日益广泛,大量的非线性负载被引入电网,导致了日趋严重的谐波污染。
电网谐波污染的根本原因在于电力电子装置的开关工作方式,引起网侧电流、电压波形的严重畸变。
目前,随着功率半导体器件研制与生产水平的不断提高,各种新型电力电子变流装置不断涌现,特别是用于交流电机调速传动的变频器性能的逐步完善,为工业领域节能和改善生产工艺提供了十分广阔的应用前景。
相关资料表明,电力电子装置生产量在未来的十年中将以每年不低于10%的速度递增,同时,由这类装置所产生的高次谐波约占总谐波源的70%以上。
在我国,当前主要的谐波源主要是一些整流设备,如化工、冶金行业的整流设备和各种调速、调压设备以及电力机车。
传统的整流方式通常采用二极管整流或相控整流方式,采用二极管整流方式的整流电路存在从电网吸取畸变电流,造成电网的谐波污染,而且直流侧能量无法回馈电网等缺点。
SVPWM控制技术

SVPWM控制技术PWM控制技术就是对脉冲宽度进行调制的技术,通过对一系列脉冲宽度进行调制来等效获得所需要的波形(包括形状和幅值)。
PWM控制的基本原理:冲量(窄脉冲的面积)相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果(输出响应波形)基本相同,即面积等效原理;用一系列幅值相等,宽度按一定规律变化的高频脉冲序列代替期望的输出波形,多用于逆变电路的控制;PWM信号生成的方法有:计算法、调制法、跟踪法,主要对调制法进行详解调制法:把希望输出的波形作为调制波,把接收调制的信号作为载波,通过信号波的调制得到所期望的PWM波形。
如典型逆变电路:DC-AC,期望逆变后的电压波形为频率50Hz,幅值为直流电压Ud的正弦波,采用PWM控制技术,调制波选为频率为50Hz的正弦波,等腰三角形为载波,用正弦波和载波的交点控制逆变电路四个全控性器件(IGBT)的通断,实现用一系列幅值相等,宽度按所期望的正弦波规律变化的高频脉冲,来等效代替所期望逆变输出的正弦交流电压波形。
上图为典型的单相桥式PWM逆变电路(单极性PWM控制),调制信号为正弦波Ur,载波Uc选为在正弦波正半周为正极性的三角波,在正弦波负半周为负极性的三角波,用正弦波Ur和载波Uc的交点控制IGBT的通断。
在正弦波Ur的正半周,VT1保持导通,VT2保持断态,当正弦波Ur大于载波Uc使VT4导通,VT3关断,输出电压为直流电压Uo=Ud(默认负载两端的电压自左向右为正)正弦波Ur小于载波Uc时,VT4关断,VT3导通,输出电压Uo=0;在正弦波Ur的负半周,VT1保持断态,VT2保持通态,当正弦波Ur小于载波Uc时,VT3导通,VT4关断,输出电压为Uo=-Ud;当正弦波Ur大于载波Uc时,VT3关断,VT4导通,输出电压Uo = 0。
通过控制四个IGBT的通断,得到的输出电压为幅值为Ud,宽度按正弦波规律变化的脉冲序列,用这样的高频脉冲序列来代替我们期望输出的正弦波电压,就是SPWM控制技术。
第十五讲PWM控制技术

u*为交流信号时,只要其频率远低于上述自励振荡频率,从 u中滤除由器件通断产生的高次谐波后,所得的波形就几乎 和u* 相同,从而实现电压跟踪控制
14.3.2 三角波比较方式
基本原理
不是把指令信号和三角波直接进行比较,而是通 过闭环来进行控制
第十五讲 PWM控制技术(二)
14.0 14.1 14.2 14.3 14.4
引言 PWM控制的基本原理 PWM逆变电路及其控制方法 PWM跟踪控制技术 PWM整流电路及其控制方法
14.3 PWM跟踪控制技术
PWM波形生成的第三种方法——跟踪控制方法 把希望输出的波形作为指令信号,把实际波形作
定时比较方式
不用滞环比较器,而是设置一个固定的时钟 以固定采样周期对指令信号和被控制变量进行采样,根
据偏差的极性来控制开关器件通断 在时钟信号到来的时刻,如i < i*,V1通,V2断,使i增大
如i > i*,V1断,V2通,使i减小 每个采样时刻的控制作用都使实际电流与指令电流的误
V1
VD3
桥PWM整流电路
半桥电路直流侧电容必须由两个 电容串联,其中点和交流电源连 接
VD2 VD1
us
Ls is Rs A
V3 B
+
ud
负 载
V4
VD4
V2
b)
全桥电路直流侧电容只要一个就 可以
图6-28
图6-28
单相PWM整流电路
交 电Leabharlann 流 感侧 和电 交
感 流
电Ls
包 源
括 内
外 部
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图15 SPWM 的谐波分析
5.7 异步调制和同步调制
异步调制 载波和信号波不保持同步的调制方式称为异步调制 。 保持载波频率fc固定不变,因而当调制波频率fr变化时,载波比N是变化的。 在信号波的半个周期内,PWM的脉冲个数不固定,相位也不固定,正负半 周期的脉冲可能不对称,半周期内前后1/4周期的脉冲也可能不对称。 同步调制 载波比N等于常数,并在变频时使载波和信号波保持同步的方式称为同步 调制。 三相SPWM逆变电路中,通常公用一个三角载波,且取载波比N为3的整数 倍,以使三相输出波形严格对称,为了保证双极性调制时每相波形的正、 负半波对称,N应取奇数。 信号波一个周期内输出的脉冲数是固定的,脉冲相位也是固定的。 分段同步调制 将异步调制和同步调制结合起来,成为分段同步调制方式。 在不同的频率段采用异步,在同一频段采用同步,结合了异步和同步的优 点。
V1m =
Vdc ×m 2
FFT window: 2 of 6 cycles of selected signal 100 50 0 -50 -100
0.07
0.075
0.08 0.085 Time (s)
0.09
0.095
0.07
0.075
0.08 0.085 Time (s)
0.09
0.095
Fundamental (60Hz) = 158.7 , THD= 137.34%
图3 SPWM的原理
5.3 SPWM 控制方法
计算法:实时在线计算困难 调制法(三角波交点法) 把希望输出的波形作为调制波, 等腰三角形作为载波,通过对载 波的调制得到希望输出的PWM波 形。 1)单极性调制:三角波载波在半个 周期内只在1个方向变化,所得 的PWM波形也只能在单极性范围 内变化。 优点:电压电流波动小,开关器 件的电压、电流应力小 缺点:生成困难 2)双极性调制:三角波载波在半个 周期内在正负2个方向变化,所 得的PWM波形也在2个方向变化。 缺点:电压电流波动较大,器件 缺点 电压、电流应力较大 优点:生成容易 优点
0 .0 7
0 .0 7 5
0 .0 8 0 .0 8 5 T im e (s )
0 .0 9
0 .0 9 5
F u n d a m e n t a l (6 0 H z ) = 1 8 . 5 5 , T H D = 7 . 6 7 % 100 Mag (% of Fundamental) 80 60 40 20 0
图2 PWM的分类
5.2 SPWM
SPWM
把逆变器的正弦输出分割成若 干个周期相同的部分; 根据冲量等效原理,一个期望 的目标函数总可以由一列等幅 不等宽的脉冲来替代(生成) 周期相同的、面积不相等的被 分割波形可以用等幅不等宽的 脉冲等效!只要使这些脉冲的 宽度按照正弦函数分布 改变脉冲的宽度就可改变正弦 波的幅值;改变调制周期就可 以改变正弦输出的频率
PWM 控制技术
课件5
5.1 概述
PWM(Pulse Width Modulation):按照某种规律,对可控开关 器件门极驱动脉冲的宽度进行控制,以改变电力电子开关器件的 导通时间,实现对输出的有效调节。 冲量(面积)等效原理: 冲量(面积)等效原理:大小、波形不相同的窄脉冲变量作用于 惯性系统时,只要他们的冲量即变量对时间的积分相等,其作用 效果基本相同。(伏秒平衡,感性负载;安秒平衡,容性负载)
分段同步调制: 分段同步调制:把整个变频范围划分成若干个频段,对 不同的频段取不同的N值(异步调制);在每个频段内 都维持载波比N恒定(同步调制),以保持输出波形对 称的优点。
0
1000
2000 3000 F re q u e n c y (H z )
4000
5000
图13 SPWM 的仿真波形图(三相双极性, 1kHz )
5.6 PWM逆变器的谐波分析 逆变器的谐波分析
单相
nωc±kωr 式中,n=1,3,5,… k=0,2,4,6,…; n=2,4,6,…时, k=1,3,5,… 最低次的主要谐波: ωc±2ωr、±4ωr
图4 SPWM的生成
单相单极性SPWM
图4 单相单极性 SPWM 的生成
三相双极性SPWM
公用一个三角调制波 三相调制信号分别调制三角 波得出各个桥臂的开关信号 uUN’、 uVN’和uWN’的PWM波 形都只有±Ud/2两种电平 输出线电压PWM波由±Ud和 0三种电平构成 负载相电压的PWM波由 ±(2/3) Ud 、±(1/3) Ud和0五 种电平组成
Байду номын сангаас
5.5 SPWM逆变器仿真 逆变器仿真
DC/AC Bipolar Inverter:
V2 fundam ental: = m/2*Vdc V peak = 0.8/2*400 = 160 V
Vdc/2 = 200 V
+ g A
Discrete PWM Generator 2 pulses
Pulses
+
i -
I2 Scope2 1 ohm 5 mH
+ v -
V2
Vdc/2 = 200 V
Universal Bridge 1 arm
DC/AC Monopolar Inverter:
V3 fundam ental: = m*Vdc V peak = 0.8*400 = 320 V
Discrete PWM Generator 4 pulses
0.07
0.075
0.08 0.085 Time (s)
0.09
0.095
0.07
0.075
0.08 0.085 Time (s)
0.09
0.095
Fundamental (60Hz) = 292.8 , THD= 75.17% 100 Mag (% of Fundamental) 80 60 40 20 0 Mag (% of Fundamental) 100 80 60 40 20 0
图1 面积等效原理示意图
PWM调制的目的:
1)灵活方便地获得幅值、频率、相位不同的所需波形; 2)有效的谐波抑制; 3)动态响应好,效率高。
PWM调制的应用:应用于几乎所有的电力电子变
换,包括整流、逆变、直流变换等,是目前最广泛使 用的波形调制技术。
PWM控制的分类:
1)单脉宽调制 2)等宽脉冲调制(直流斩波、 直流电机调速) 3)可变脉宽调制 (SPWM、SVPWM、 SHEPWM等)
0
0 -100
-500
0.035
0.04
0.045
0.05 Time (s)
0.055
0.06
0.065
-200
0.035
0.04
0.045
0.05 Time (s)
0.055
0.06
0.065
Fundamental (60Hz) = 317.4 , THD= 69.24% 100
Mag (% of Fundamental)
图14 SPWM 的谐波分析
三相
n=1,3,5,…时, k=3(2m-1)±1, m=1,2,… ; n=2,4,6,…时, k=6m-1,m=0,1,2 k=6m+1,m=1,2, 最低次的主要谐波: ωc+4ωr 、ωc-2ωr ωc+10ωr、 ωc-8ωr nωc±kωr
少了3的倍数次旁瓣谐波! 少了 的倍数次旁瓣谐波! 的倍数次旁瓣谐波
Fundamental (60Hz) = 148.7 , THD= 2.01% 100 Mag (% of Fundamental) 80 60 40 20 0
80 60 40 20 0
0
1000
2000 3000 Frequency (Hz)
4000
5000
0
1000
2000 3000 Frequency (Hz)
+ g A B Pulses
+
i -
I3 1 ohm 5 mH
+ v -
Scope3
Vdc = 400 V
V3
Universal Bridge 2 arms
图7 SPWM 的仿真电路图
单相SPWM(双极性) (双极性) 单相
FFT window: 2 of 6 cycles of selected signal 400 200 0 -200 -400
Fundamental (60Hz) = 74.38 , THD= 7.31% 100
100 Mag (% of Fundamental)
Mag (% of Fundamental)
0 1000 2000 3000 Frequency (Hz) 4000 5000
80 60 40 20 0
80 60 40 20 0
Universal Bridge 3 arms
Pulses
208V /208V 1kVA Transformer A B C
Vab_load1 1 kW 0.5 kvar @ 208V
Discrete PWM Generator 6 pulses
图9 SPWM 的仿真电路图(三相双极性)
图10 SPWM 的调制波、载波,1、3、5脉冲(三相双极性,1kHz)
图5 三相双极性 SPWM 的生成
SPWM的基波电压
定义: 为调制比m 定义:M=Urm/Ucm为调制比 输出基波幅值和调制比m成正比 定义: N= 为载波比N 定义: N=fc/fr为载波比N 输出波形的谐波含量和载波比成 反比。 SPWM基波电压 SPWM逆变器输出脉冲序列的 基波电压正是调制时所要求的等 效正弦波 u1m=m×ud(单极性) u1m=1/2×m×ud(双极性) 本质是一个线性放大器