方位角反算(完美版)
excel坐标反算方位角公式
excel坐标反算方位角公式
在Excel中,坐标的反算方位角可以使用反三角函数来计算。
具
体计算公式如下:
方位角= DEGREES(ATAN2(Y2-Y1,X2-X1))
其中,(X1, Y1)是起点坐标,(X2, Y2)是终点坐标。
需要注意的是,Excel的ATAN2函数返回的结果是弧度值,所以需要将其转换为角度值,可以使用DEGREES函数进行转换。
拓展:
方位角是指从某一点指向另一点的方向与正北方向的夹角。
在
Excel中,方位角也可以通过向量函数来计算。
一个向量可以由其起点坐标和终点坐标表示,起点坐标为(0, 0)。
可以使用向量函数来计算两个向量之间的夹角。
向量函数可以通过以
下公式计算两个向量的夹角:
夹角= ACOS((X1*X2 + Y1*Y2) / (SQRT(X1^2 + Y1^2) *
SQRT(X2^2 + Y2^2)))
其中,(X1, Y1)和(X2, Y2)分别是两个向量的终点坐标。
需要注
意的是,这个公式计算得到的夹角是弧度值,如果需要转换为角度值,可以使用DEGREES函数进行转换。
除了方位角,还有其他一些与坐标相关的计算问题,例如计算两
点之间的距离、计算线段的长度等等。
这些问题也可以通过Excel的
函数来解决。
正、反坐标方位角及其推算

2
正、反坐标方位角及其推算
•坐标正算
当已知直线起始点坐标和直线的长度,方位角,需求 直线终点坐标时,称为坐标正算。
•坐标反算
当已知直线两端点坐标,要求反算该直线的边长和 方位角时,我们称为坐标反算。
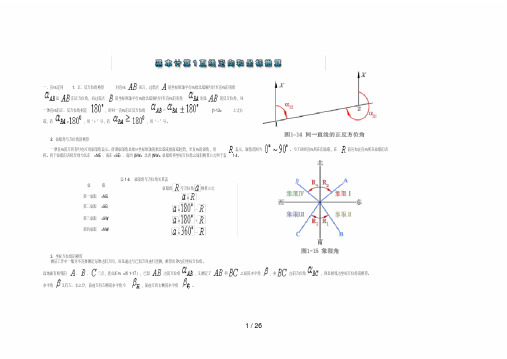
y arctan x y 1800 arctan x y 1800 arctan x 3600 arctan y x x, y均为正,即位于第 I相限 x(-),y( ),即位于第II相限 x(-),y(-) ,即位于第III相限 x( ), y(-) ,即位于第IV相限
3Leabharlann 坐标方位角及其推算用左角推算:
用右角推算: 手工推算步骤:
•沿前进方向,用已知方位角加(减)左(右)角; •所得值与180º 比较,大于或等于180º ,则减180º , 反之,加180º ,再检查是否在0º ~360º ,如小于0, 则加360º ,如大于 360º ,则减 360º ; •依次可推得所有边的方位角。
正、反坐标方位角及其推算
正、反坐标方位角
正方位角:通常以直线前 进方向为正方向确定的方 位角。 反之,称为反方位角。
正方位角=反方位角±180度
1
正、反坐标方位角及其推算
坐标方位角的推算
•坐标增量概念 两点间坐标值之差 称为坐标增量。
由一已知点计算另一未 知点坐标的计算公式为: XB=XA+⊿XAB YB=YA+⊿YAB ⊿XAB=S×cos αAB ⊿YAB=S×sin αAB α AB- 方位角
4
方位角计算公式
辅助 计算
点名 2 BM1 1
2
3
BM2
测站数 3 8 3 4 5
20
表 2-2 附合水准路线计算
观测高差 /m
改正数 /m
改正后高差 /m
4
5
6
+8.364
- 0.014
+8.350
- 1.433
- 0.005
- 1.438
- 2.745
- 0.007
- 2.752
+4.661
- 0.008
+4.653
+ 8.847
- 0.034
一、直线定向
1、正、反方位角换算
对直线
而言,过始点
的坐标纵轴平行线指北端顺时针至直线的夹角
是
的正方位角,而过端点
的坐标纵轴平行线指北端顺时针至直线的夹角
则是
的反方位角,同
一条直线的正、反方位角相差
,即同一直线的正反方位角
=
(1-13>
上式右
端,若
<
,用“+”号,若
,用“-”号。
2、象限角与方位角的换算
算
各
待
定
点
的
高
程
。
如上 所述,闭 合水准 路线的 计算方法除高差 闭合差 的计算有 所区别 而外,其余与附 合路线 的计算 完全相 同。
二
、
举
例
1.
附
合
水
准
路
线
算
例
5 / 26
下图 2-18 所示附合水准路线为例,已知水准点 A 、 B 和待定点 1、2、3 将整个路线分为四个测段。
测段号 1 1 2 3
坐标反算方位角例题

坐标反算方位角例题
当涉及到坐标反算和方位角的例题时,通常是指根据给定的两个坐标点,计算出一个点相对于另一个点的方位角。
下面是一个坐标反算方位角的例题及其解答:
例题:已知点A的坐标为(2, 3),点B的坐标为(5, 7),求点B相对于点A的方位角。
解答:
1.首先,计算出点B相对于点A的水平和垂直距离。
水平距离
= 点B的x坐标 - 点A的x坐标,即 5 - 2 = 3。
垂直距离 = 点B的y坐标 - 点A的y坐标,即 7 - 3 = 4。
2.接下来,利用反正切函数(atan2)计算出方位角。
方位角=
arctan(垂直距离 / 水平距离)。
方位角 = arctan(4 / 3) ≈ 51.34°
3.最后,根据计算结果得出点B相对于点A的方位角为约
51.34°。
注意:方位角一般以角度表示,可以用度数(°)或弧度(rad)表示,具体要根据题目要求或上下文来确定使用哪种表示方式。
两点反算方位角的通用公式
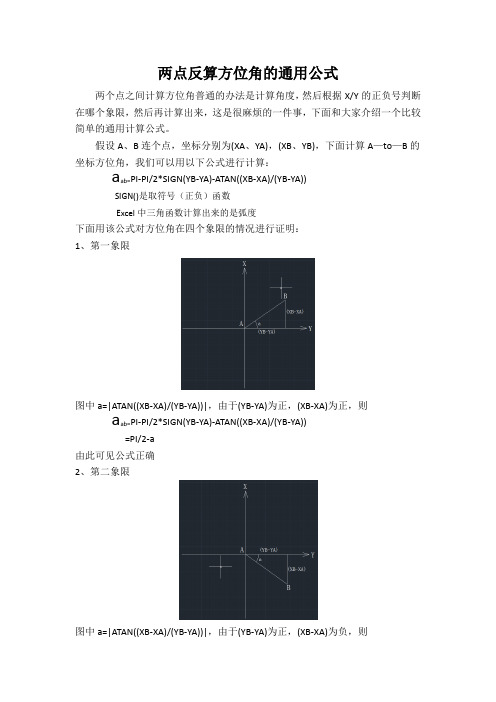
两点反算方位角的通用公式两个点之间计算方位角普通的办法是计算角度,然后根据X/Y的正负号判断在哪个象限,然后再计算出来,这是很麻烦的一件事,下面和大家介绍一个比较简单的通用计算公式。
假设A、B连个点,坐标分别为(XA、YA),(XB、YB),下面计算A—to—B的坐标方位角,我们可以用以下公式进行计算:a ab=PI-PI/2*SIGN(YB-YA)-ATAN((XB-XA)/(YB-YA))SIGN()是取符号(正负)函数Excel中三角函数计算出来的是弧度下面用该公式对方位角在四个象限的情况进行证明:1、第一象限图中a=|ATAN((XB-XA)/(YB-YA))|,由于(YB-YA)为正,(XB-XA)为正,则a ab=PI-PI/2*SIGN(YB-YA)-ATAN((XB-XA)/(YB-YA))=PI/2-a由此可见公式正确2、第二象限图中a=|ATAN((XB-XA)/(YB-YA))|,由于(YB-YA)为正,(XB-XA)为负,则a ab=PI-PI/2*SIGN(YB-YA)-ATAN((XB-XA)/(YB-YA))=PI/2+a由此可见公式正确3、第三象限图中a=|ATAN((XB-XA)/(YB-YA))|,由于(YB-YA)为负,(XB-XA)为负,则a ab=PI-PI/2*SIGN(YB-YA)-ATAN((XB-XA)/(YB-YA))=3/2PI-a由此可见公式正确4、第四象限图中a=|ATAN((XB-XA)/(YB-YA))|,由于(YB-YA)为负,(XB-XA)为正,则a ab=PI-PI/2*SIGN(YB-YA)-ATAN((XB-XA)/(YB-YA))=3/2PI+a由此可见公式正确从以上证明可以确定该公式对于四个象限的方位角都能进行正确计算。
不过需要说明的是当(YB-YA)为0时会出现bug,这种特例需要我们在实际工作中进行特殊处理。
方位角计算公式

⽅位⾓计算公式⼀、直线定向1、正、反⽅位⾓换算对直线⽽⾔,过始点的坐标纵轴平⾏线指北端顺时针⾄直线的夹⾓是的正⽅位⾓,⽽过端点的坐标纵轴平⾏线指北端顺时针⾄直线的夹⾓则是的反⽅位⾓,同⼀条直线的正、反⽅位⾓相差,即同⼀直线的正反⽅位⾓= (1-13)上式右端,若<,⽤“+”号,若,⽤“-”号。
2、象限⾓与⽅位⾓的换算⼀条直线的⽅向有时也可⽤象限⾓表⽰。
所谓象限⾓是指从坐标纵轴的指北端或指南端起始,⾄直线的锐⾓,⽤表⽰,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限⾓和坐标⽅位⾓之间的换算公式列于表1-4。
表1-4 象限⾓与⽅位⾓关系表3、坐标⽅位⾓的推算测量⼯作中⼀般并不直接测定每条边的⽅向,⽽是通过与已知⽅向进⾏连测,推算出各边的坐标⽅位⾓。
设地⾯有相邻的、、三点,连成折线(图1-17),已知边的⽅位⾓,⼜测定了和之间的⽔平⾓,求边的⽅位⾓,即是相邻边坐标⽅位⾓的推算。
⽔平⾓⼜有左、右之分,前进⽅向左侧的⽔平⾓为,前进⽅向右侧的⽔平⾓。
设三点相关位置如图1-17()所⽰,应有=++ (1-14)设三点相关位置如图1-17()所⽰,应有=++-=+- (1-15)若按折线前进⽅向将视为后边,视为前边,综合上⼆式即得相邻边坐标⽅位⾓推算的通式:=+(1-16)显然,如果测定的是和之间的前进⽅向右侧⽔平⾓,因为有=-,代⼊上式即得通式=- (1-17)上⼆式右端,若前两项计算结果<,前⾯⽤“+”号,否则前⾯⽤“-”号。
⼆、坐标推算1、坐标的正算地⾯点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标⽅位⾓和⼀个端点的坐标,计算直线另⼀个端点的坐标的⼯作。
如图1所⽰,设直线AB的边长DAB和⼀个端点A的坐标XA、YA为已知,则直线另⼀个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角计算公式

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限角与方位角换算公式==-=+=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算 1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB 的边长DAB 和一个端点A 的坐标XA 、YA 为已知,则直线另一个端点B 的坐标为: XB=XA+ΔXAB YB=YA+ΔYAB式中,ΔXAB 、ΔYAB 称为坐标增量,也就是直线两端点A 、B 的坐标值之差。
方位角的计算方法
方位角的计算方法方位角是指在平面直角坐标系中,特定点与正方向x轴之间逆时针方向的夹角。
它在数学、地理、航空航天等领域中都有广泛的应用。
计算方位角的方法主要有以下几种:1.基于直角坐标系的计算:假设有两个点A(x1, y1)和B(x2, y2),首先需要计算出两点之间的直线斜率k = (y2 - y1) / (x2 - x1)。
然后利用反正切函数,通过求解arctan(k)得到弧度值θ。
最后利用单位换算,将弧度值θ转化为角度值α=θ * 180 / π,即为所求的方位角。
2.基于极坐标系的计算:在极坐标系中,一个点可以通过距离r和极角θ来表示。
假设有两个点A(r1,θ1)和B(r2,θ2),要计算两点之间的方位角,首先需要将两点的极角θ转化为弧度制,然后通过计算Δθ=θ2-θ1得到两点之间的相对角度。
最后利用单位换算,将相对角度Δθ转化为角度值α=Δθ*180/π,即得到方位角。
3.基于方向向量的计算:假设有两个点A(x1, y1)和B(x2, y2),可以将两点之间的连线看作一个方向向量。
首先需要计算出两点之间的方向向量V(x2 - x1, y2 - y1)。
然后利用反正切函数,通过求解arctan(Vy / Vx)得到弧度值θ。
最后利用单位换算,将弧度值θ转化为角度值α=θ * 180 / π,即为所求的方位角。
需要注意的是,在计算方位角时,可能会遇到特殊情况,例如:-当两点在同一直线上时,方位角为0或180度;-当两点重合时,方位角没有定义。
总结起来,方位角的计算方法有基于直角坐标系、极坐标系和方向向量三种方法,根据具体情况选择适合的方法进行计算。
(整理)方位角计算公式

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式=第一象限(NE)第二象限(SE)=-=+第三象限(SW )第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
excel坐标反算方位角公式

excel坐标反算方位角公式Excel坐标反算方位角公式是一种计算两个坐标点之间方位角的数学公式。
方位角是指从一个点到另一个点的方向角度,通常以北向为参考方向。
在Excel中,可以使用以下公式来计算方位角:1. 首先,确定两个坐标点的纬度和经度值。
假设第一个点的纬度为lat1,经度为lon1;第二个点的纬度为lat2,经度为lon2。
2. 将经纬度转换为弧度制。
Excel中的弧度函数是RADIANS()。
可以使用以下公式进行转换:lat1_rad = RADIANS(lat1)lat2_rad = RADIANS(lat2)lon1_rad = RADIANS(lon1)lon2_rad = RADIANS(lon2)3. 计算方位角。
使用以下公式计算方位角:x = COS(lat2_rad) * SIN(lon2_rad - lon1_rad)y = COS(lat1_rad) * SIN(lat2_rad) - SIN(lat1_rad) * COS(lat2_rad) *COS(lon2_rad - lon1_rad)angle_rad = ATAN2(x, y)4. 将弧度制的方位角转换为度数。
Excel中的度数函数是DEGREES()。
可以使用以下公式进行转换:angle_deg = DEGREES(angle_rad)最终,angle_deg即为两个坐标点之间的方位角,以度数表示。
请注意,计算结果的范围一般为[-180, 180],其中0度表示正北,正负数表示相对于正北的偏转角度。
以上是使用Excel进行坐标反算方位角的公式。
您可以在Excel中按照上述步骤进行计算,以获得具体的方位角数值。
方位角计算公式

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13> 上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东<NE)、南东<SE)、南西(SW>、北西(NW>。
象限角和坐标方位角之间的换算公式列于表1-4。
象限角与方位角换算公式==-=+=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线<图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17(>所示,应有=++ (1-14>设三点相关位置如图1-17(>所示,应有=++-=+- (1-15>若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16>显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17>上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角计算详细方法
K=
1 = 4000 D
<
1 2000
例题:
用EXCEL程序进行闭合导线计算
(四)附合导线平差计算
说明:与闭合导线基本相同,以下是两者的不同点:
1、角度闭合差的分配与调整
方法1:
(1)计算方位角闭合差: f α = α 终计算
α 终已知
(2)满足精度要求,若观测角为左角,则将fα反符号 平均分配到各观测角上;若观测角为右角,则将fα同 符号平均分配到各观测角上。
由A、B两点坐标来计算αAB、DAB
D AB = tgα AB = Δx
2 AB
X
YAB XAB AB DAB
B
+ Δy
2 AB
A
Δy AB Δx AB
0
y
αAB的具体计算方法如下:
(1)计算: Δy
Δx
AB AB
= xB = yB
xA yA
(2)计算:
α AB 锐 = arctg
Δy Δx
∑D
(2)分配坐标增量闭合差。
若K<1/2000(图根级),则将fx、fy以相反符号,按 边长成正比分配到各坐标增量上去。并计算改正后的坐标
增量。
V Δxi = fx
1
∑D
fy
Di
A1 484318 A
1
970300 1051706 2
V Δyi =
∑D
Di
A
2
XA=536.27m YA=328.74m
图表:附合导线坐标计算表
点 转折角 改正后 方位角 边 长 坐 标 增量(米) 号 (右) D 转折角 (米) X Y 改 正 后 坐标(米) 点 增量(米) 号 X Y X Y
(整理)方位角计算公式
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式=第一象限(NE)第二象限(SE)=-=+第三象限(SW )第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角计算公式
方位角计算公式部门: xxx时间: xxx整理范文,仅供参考,可下载自行编辑一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13> 上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东<NE)、南东<SE)、南西(SW>、北西(NW>。
象限角和坐标方位角之间的换算公式列于表1-4。
象限角与方位角换算公式==-=+=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线<图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17(>所示,应有=++ (1-14>设三点相关位置如图1-17(>所示,应有=++-=+- (1-15>若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16>显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17>上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
方位角计算公式
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角计算公式.

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角计算详细方法

YA=328.74m
1233006
4 1014624
4
3
3
例题:闭合导线坐标计算表
点 号
转折角 (右)
改正后 方向角 转折角
边长 D
(米)
坐标 增量(米) X Y
改 正 后 坐标(米) 增量(米)
点 号
X Y X Y
A 1
2 3 4 A
48 43 18
+12
97 03 00 97 03 12
其中,ΔXAB=XB-XA ΔYAB=YB-YA
YAB
XAB AB
DAB
A
0
B
y
3、坐标反算公式
由A、B两点坐标来计算αAB、DAB
DAB =
Δx
2 AB
+
Δy
2 AB
tgα AB
=
Δy AB Δx AB
αAB的具体计算方法如下:
(1)计算: Δx AB = xB xA Δy AB = yB yA
= x²+ y²=0.120
K = D
0
=
1 4000
<1
2000
例题:
用EXCEL程序进行闭合导线计算
(四)附合导线平差计算
说明:与闭合导线基本相同,以下是两者的不同点:
1、角度闭合差的分配与调整 方法1:
(1)计算方位角闭合差: fα = α终计算 α终已知
(2)满足精度要求,若观测角为左角,则将fα反符号 平均分配到各观测角上;若观测角为右角,则将fα同符 号平均分配到各观测角上。
2
1051706
2
YA=328.74m
1233006
4 1014624