欧陆590中英文参数对照表
欧陆590直流调速器调试步骤
欧陆590直流调速器调试步骤目录型号说明2操作面板的使用3接线41、主回路接线42、控制端子接线53、查看控制端子配置7默认控制端子基本接线8必要的修改参数10浏览内部设置11系统菜单目录13通电运行15中英文对照报警说明16附录参数表24一、型号说明担号变・t1WMJ^iSr59OP■590—4<?EK."T>zt>■-■|r-^.^=0■I JI _1jn-,凹他#t 磷卑oe JS*4dr 出电握-屉处值运牛竝曰r 丼为坦剩叮产皿蚣肛酋»n ]咗=1牛上L .CHI 壬占=1m A004O-4OA-0070-7OA <3110-]10A,盯15*二卩占启扎01ac»=L 8UA.□2:70=27U-A C380-S80A .OSOO-MIO-A25=725A.O 呂申"■呂3-OAdSOC»~SOO/k1」580—158O/\LZC»e>-1■1■Pg 宀卫二!M-卫二仙几・27<JIJ —27-UUA应翘心己皱脸•1口社i*ft 电i 旦叛血小 220O LC 22OV f±30*i>g ■创血 500(He500V <士JO^.,Nl/石CHz sew IMJC &OOV <±]i>^i.J 50L '«JHZ rIXiJr-Kj 4*5>占閒SDOicrfi.^nv r ±ECF^)<IJi l-C 炎'屯>-1•=*i!目他報m 连i ■內总LW :日:包齐q 4备以总fJLMirr 帜坦站在饰£扭而〉较备M*勒金证出kHIr 琴挤05CK1_(J4剧叫却用户用必rfj-」-HA.「比曲业工曲IM-讨鼓1食冷第三位揪件舉号aJh :准<[P20->的悍卩・面战越從 第到仇操作平白 0-尢燥tv T 吿 etui:5 ■»•円血『杓确址阳严帕界Jfrii/i.VUK-& ]-R=SiiFi-OEt-=Lfr v^i K 参nl 」IdFU [嗣好丁-谢7sp-1'if^i^Lft (爭也冃」IJK 务F 唧:iJT=止:比利带£⑥邑冃扌门IDA 务TMIO斥■•+.億了布JW :忙选的丘蹴类理鞘垃呢cjL'ii-^^/r-■+?<■(>>RAM =lllfl^.屯缶EMV =^P4HS t侍遥捜刑1EWP-^i^S 1卿科丸泮艸维一仃:逸、丨战璃比导汀雏一I :选!744*•叫僅・」:荷別•韋T MW?麺貳段罠裁的辿顾口=卫柞瑚锻邃J 嗯 E i W-EIAS<-11/l^.ic 如硕屮1吱期<RS46^il ) FROF=pTDrLbUN 切说 LJNK-IJNK L 糙粘1佛垃 H••it三卷牛宇徇堰电了辅助电浙o=z ■J^iH :W'U^S 1J s i^J 23tov 111;r^ro^t ]5筑歸HE *典宥人:1i 磺A.旳杂型豁4眄115=110V 崔U 22ty\'<11;lflT^.J-S0/MIH.ZZZ4>=ZZU¥i'J 244FV |正琵10%>A-S:-*-三位牛宁鞫规世『特祇工繰选戊羽川=從有牛卜轴i 选宜1二、操作面板的使用。
欧陆590直流调速器参数快速设置说明

欧陆590直流调速器参数快速设置说明(总4页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除欧陆590直流调速器参数快速设置说明590P的参数快速设置:通电后按M键直到出现DIAGNOSTS(诊断)后按向上的键,找到CONFIGURE DRIVE(配置调速器),按M键进入菜单,找到CONFIGURE ENABLE(组态有效),按M键进入菜单,将DISBALE(不允许)改成ENABLE(允许),此时面板灯闪烁,按E键退出;按向下的键,找到NOM MOTOR VOLTS(电枢电压),按M键进入菜单,输入额定电枢电压,按E键退出;按向下的键找到ARMATURE CURRENT(电枢电流),按M键进入菜单,输入额定电枢电流,按E键退出;按向下的键找到FIELD CURRENT(励磁电流),按M键进入菜单,输入额定励磁电流,按E键退出;找到 MODE(励磁控制方式),按M键进入菜单,把VOLTAGE CONTROL(电压控制)改成CURRENT CONTROL(电流控制),按E键退出;按向下的键找到SPEED FBK SELECT(速度反馈选择),按M进入菜单,按向上或向下键选择ARM VOLTS(电枢电压反馈)、ANALOG TACH(测速反馈)或ENCODER(编码反馈),选择反馈方式是根据所选的配件板及实际电机使用的反馈方式,然后按E退出;按向上键找到CONFIGURE ENABLE(组态有效),按M 键进入,把ENABLE(允许)改成DISABLE(不允许),此时面板不再闪烁。
按E一直退到底。
参数保存:按M键直到出现DIAGNOSTS(诊断)后,按向上的键找到PARAMETER SAVE,按M进入,然后按向上的键,参数自动保存。
按E键一直退到底。
*自动调节步骤(此过程一定不能少):手动去掉电机的励磁,为电机做一次自动调节,夹紧电机的轴,然后在CURRENT LOOP(电流环)中,找到AUTOTUNE菜单,将OFF改为ON,然后在10秒内启动调速器,调速器的RUN灯将闪烁,在这个过程中请不要给停止,完成自动调节后调速器会自动释放接触器线圈,然后保存参数。
欧陆报警中文

过速(OVERSPEED)电机过速—速度反馈信号超过了额定速度的125%速度回路调整不良(报警只在具有编码器或电枢电压反馈选择时才运行)报警时间延迟:0.1 秒丢失脉冲(MISSING PULSE)6-脉冲电枢电流波形中出现一个丢失脉冲。
当电机负荷超过“不连续”DISCONTINUOUS)参数值的1.5 倍时出现跳闸触发插头故障连接故障报警时间延迟:60 秒励磁过电流(FIELD OVER I)电机励磁电流量超过正常值的120%校准器故障控制回路调整不良(报警只在选择励磁电流控制模式时才工作)报警延迟时间:15 秒散热片跳闸(HEATSINK TRIP)调速器散热片温度太高环境温度太高通风不良或变频器间的间隙不当风扇故障/检查电源板熔断器,错误旋转(超过70A 额定电桥的模型)通风口阻塞空气滤波器阻塞电枢电流过高—检查电机铭牌上的标称电流和调速器的电流标准注释:要重启调速器,必须使堆栈降温报警时间延迟:0.75 秒过电压(OVER VOLTS)电机电枢电压超过额定电压的120%电枢连接松弛励磁电压调整不良励磁电流回路调整不良弱磁反电动势回路调整不良速度回路调整不良报警延迟时间:1.5 秒温度传感器(THERMISTOR)电机温度太高通风不够风机故障—检查方向,空气滤波器阻塞(超过70A 额定电桥的模型)电枢电流过高—检查铭牌上的标称电枢电流和电流标准注释:要重启调速器,必须使电机降温报警延迟时间:1.5 秒速度反馈(SPEED FEEDBACK)速度反馈与电枢电压反馈之间的差别高于“速度反馈报警等级设定”参数的值如果“弱磁启用”(FLD WEAK ENABLE)参数已经启动,在弱磁区域速度反馈小于10%模拟测速器反馈极性不正确(端子G3 和G4)编码器符号参数极性不正确电线没有连接,包括光纤测速发电机故障测速发电机耦合故障报警延迟时间:0.4 秒编码器故障(ENCODER FAILED)没有速度反馈信号速度反馈选择参数已经设定到编码器但选项编码面板没有安装当使用时,检查光纤的损坏,弯曲半径,操作长度—参阅微型测速器手册检查电缆和编码器的连接励磁故障(FIEDL FAIL)在“电流控制”模式时,励磁电流低于额定电流的6%在“电压控制”模式时,励磁电流低于50mA(默认电流负载15K)打开电路上电机的励磁—检查连接并测定励磁阻抗励磁控制器运行错误当交流电源馈给随车励磁调节器时,检查FLI和FL2 连接的线对线电压(而不是线对零)—L1 到FL1,L2 到FL2。
欧陆590直流调速器参数快速设置说明
欧陆590直流调速器参数快速设置说明-CAL-FENGHAI.-(YICAI)-Company One1欧陆590直流调速器参数快速设置说明590P的参数快速设置:通电后按M键直到出现DIAGNOSTS(诊断)后按向上的键,找到CONFIGURE DRIVE(配置调速器),按M键进入菜单,找到CONFIGURE ENABLE(组态有效),按M键进入菜单,将DISBALE(不允许)改成ENABLE(允许),此时面板灯闪烁,按E键退出;按向下的键,找到NOM MOTOR VOLTS(电枢电压),按M键进入菜单,输入额定电枢电压,按E键退出;按向下的键找到ARMATURE CURRENT(电枢电流),按M键进入菜单,输入额定电枢电流,按E键退出;按向下的键找到FIELD CURRENT(励磁电流),按M键进入菜单,输入额定励磁电流,按E键退出;找到 MODE(励磁控制方式),按M键进入菜单,把VOLTAGE CONTROL(电压控制)改成CURRENT CONTROL(电流控制),按E键退出;按向下的键找到SPEED FBK SELECT(速度反馈选择),按M进入菜单,按向上或向下键选择ARM VOLTS(电枢电压反馈)、ANALOG TACH(测速反馈)或ENCODER(编码反馈),选择反馈方式是根据所选的配件板及实际电机使用的反馈方式,然后按E退出;按向上键找到CONFIGURE ENABLE(组态有效),按M键进入,把ENABLE(允许)改成DISABLE(不允许),此时面板不再闪烁。
按E一直退到底。
参数保存:按M键直到出现DIAGNOSTS(诊断)后,按向上的键找到PARAMETER SAVE,按M进入,然后按向上的键,参数自动保存。
按E键一直退到底。
*自动调节步骤(此过程一定不能少):手动去掉电机的励磁,为电机做一次自动调节,夹紧电机的轴,然后在CURRENT LOOP(电流环)中,找到AUTOTUNE 菜单,将OFF改为ON,然后在10秒内启动调速器,调速器的RUN灯将闪烁,在这个过程中请不要给停止,完成自动调节后调速器会自动释放接触器线圈,然后保存参数。
欧陆590+系列直流驱动器参数说明表

1DIGITAL DC DRIVE ISSUE:×.×2*MENU LEVEL 菜单3**DIAGNOSTICS 诊断4***SPEED DEMAND 速度给定[089]XXX.XX %0.00%只读4***SPEED FEEDBACK 速度反馈[207]XXX.XX %0.00%只读4***SPEED ERROR速度误差[297]XXX.XX %0.00%只读4***SPD LOOP OUTPUT 速度环输出[356]XXX.XX %0.00%只读4***CURRENT DEMAND 电流给定[299]XXX.XX %0.00%只读4***CURRENT FEEDBACK 电流反馈[298]XXX.XX %0.00%只读4***CURRENT FBK. AMPS 电流反馈安培[538]XXXX.X AMPS 0.0AMPS 安培只读4***IaFbk UNFILTERED 电流反馈未滤波[065]XXX.X %(h)只读4***IaDmd UNFILTERED 电流给定未滤波[066]XXX.X %(h)只读4***POS. I CLAMP 正电流箝位[087]XXX.X %(h)0.0%只读4***NEG. I CLAMP负电流箝位[088]XXX.X %(h)0.0%只读4***ACTUAL POS I LIM 有效正电流限幅[067]XXX.X %(h)0.0%只读4***ACTUAL NEG I LIM 有效负电流限幅[061]XXX.X %(h)0.0%只读4***INVERSE TIME O/P 反向时间输出[203]XXX.XX %200.00%只读4***DRIVE START 驱动器启动[082]0:OFF; 1:ON OFF 只读0~70:STOP 停止1:STOP 停止2:RUN 运行7:CRAWL 爬行只读STOP ***OPERATING MODE只读只读只读只读读/写只读只读只读菜单层标记号出厂设置设定范围6:INCH/JOG 2 渐进/点动24运转模式 (点动/缓慢)[212][084]3:TAKE-UP SLACK 1 拉紧放松14:TAKE-UP SLACK 2 拉紧放松25:INCH/JOG 1 渐进/点动14***DRIVE ENABLE 驱动器使能中文解释操作面板英文显示[042][077][079][112][113][080]***AT STANDSTILL 0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止处于静止堵转跳闸斜坡程序停机4***AT CURRENT LIMIT 处于电流极限处于零速***AT ZERO SPEED 40:FALS 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真0:0K 正确1:FAILED 失败0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真OK 正确FALSE 虚TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真***RAMPING ***PROGRAM STOP 4444***STALL TRIP 欧陆590+参数说明表——按MMI 菜单顺序只读4***AT ZERO SETPOINT 处于零设定值[078]4***FIELD DEMAND 励磁给定[183]XXX.XX %0.00%只读4***FIELD I FBK.励磁电流反馈[300]XXX.XX %0.00%只读4***FIELD I FBK. AMPA 励磁电流反馈安培[539]XXXX.X AMPS 0.0 AMPS 安培只读4***RAW FIELD FBK.原始励磁电流反馈[181]XXX.XX %0.00%只读4***FLD. FIRING ANGLE 励磁触发角[184]XXX.XX DEG 0 DEG 度只读4***ANIN 1 (A2)模拟输入1 (A2)[050]XXX.XX 0.00 VOLTS 伏只读4***ANIN 2 (A3)模拟输入2 (A3)[051]XXX.XX 0.00 VOLTS 伏只读4***ANIN 3 (A4)模拟输入3 (A4)[052]XXX.XX 0.00 VOLTS 伏只读4***ANIN 4 (A5)模拟输入4 (A5)[053]XXX.XX 0.00 VOLTS 伏只读4***ANIN 5 (A6)模拟输入5 (A6)[054]XXX.XX 0.00 VOLTS 伏只读4***ANOUT 1 (A7)模拟输出1 (A7)[055]XXX.XX 0.00 VOLTS 伏只读4***ANOUT 2 (A8)模拟输出2 (A8)[056]XXX.XX 0.00 VOLTS 伏只读4***START (C3)起动 (C3)[068]0:OFF; 1:ON OFF 只读4***DIGITAL INPUT C4数字输入 (C4)[069]0:OFF; 1:ON OFF 只读4***DIGITAL INPUT C5数字输入 (C5)[070]0:OFF; 1:ON OFF 只读4***DIGIN 1 (C6)数字输入1 (C6)[071]0:OFF; 1:ON OFF 只读4***DIGIN 2 (C7)数字输入2 (C7)[072]0:OFF; 1:ON OFF 只读4***DIGIN 3 (C8)数字输入3 (C8)[073]0:OFF; 1:ON OFF 只读4***DIGOUT (B5)数字输出 (B5)[074]0:OFF; 1:ON ON 只读4***DIGOUT (B6)数字输出 (B6)[075]0:OFF; 1:ON ON 只读4***DIGOUT (B7)数字输出 (B7)[076]0:OFF; 1:ON OFF 只读4***RAISE/LOWER O/P 上升/下降输出[264]XXX.XX %0.00%只读4***PID OUPUT PID 输出[417]XXX.XX %0.00%只读4***PID ERRORPID 误差[415]XXX.XX %0.00%只读4***SPT SUM OUTPUT 设定值合计1输出[086]XXX.XX %0.00%只读4***RAMP OUTPUT 斜 坡输出[085]XXX.XX %0.00%只读4***SPEED SETPOINT 速度设定值[063]XXX.XX %0.00%只读4***TERMINAL VOLTS 端电压[057]XXX.X %(h)0.0%只读4***BACK EMF反电动势[060]XXX.X %(h)0.0%只读4***TACH INPUT (B2)测速输入 (B2)[308]XXX.XX %0.0%只读4***RAW TACH INPUT 原始测速输入[058]XXX.X %(h)只读4***ENCODER编码器[206]XXXXX RPM 0 RPM 转/分钟只读4***RAW ENCODER RPM 原始编码器每分钟转数[059]XXX.XX RPM 只读4***RAW SPEED FBK 原始速度反馈[062]XXX.XX %只读4***RAW SPEED ERROR 原始速度误差[064]XXX.XX %只读4***CONTACTOR CLOSED 接触器闭合 (未分配)[083]0:OFF; 1:ON 只读只读只读只读只读只读只读0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真0:FALSE 虚;1:TRUE 真[374][376]FALSE 虚TRUE 真0:FALSE 虚;1:TRUE 真FALSE 虚4***FIELD ENABLED 励磁使能44***HEALTH LED ***PID CLAMPED ***DRIVE RUNNING 驱动器运行 (未分配)44DISABLED 禁止0:DISABLED 禁止;1:ENABLED 使能[122]正常指示灯PID箝位[416][169]4***READY准备[125]***SYSTEM RESET系统复位 (未分配)3**SETUP PARAMETERS 建立参数4***RAMPS斜坡5****RAMP ACCEL TIME 斜坡加速时间[002]0.1~600.0 SECS 0.1 SECS 秒读写5****RAMP DECEL TIME 斜坡减速时间[003]0.1~600.0 SECS 0.1 SECS 秒读写5****RAMP HOLD 斜坡保持[118]0:OFF; 1:ON OFF 读写5****RANP INPUT 斜坡输入[005]-105.00~105.00%0.00%读写5****%S-RAMPS 斜坡百分数[266]0.00~100.00% 2.50%读写5****RAMPING THRESH.斜坡阈值[286]0.00~100.00%0.50%读写5****RESET VALUE 复位值[422]-300.00~300.00%0.00%读写5****MIN SPEED 最小速度[126]0.00~100.00%0.00%读写4***AUX O/P 辅助输入/输出5****AUX START 辅助启动[161]0:OFF ;1:0N ON 读写5****AUX JOG 辅助点动[227]0:OFF ;1:0N ON 读写5****AUX ENABLE 辅助使能[168]0:OFF ;1:0N ON 读写5****AUX DIGOUT 1辅助数字输出 1[094]0:OFF ;1:0N OFF 读写5****AUX DIGOUT 2辅助数字输出 2[095]0:OFF ;1:0N OFF 读写5****AUX DIGOUT 3辅助数字输出 3[096]0:OFF ;1:0N OFF 读写5****ANOUT 1模拟输出 1[128]-100.00~100.00%0.00%读写5****ANOUT 2模拟输出 2[129]-100.00~100.00%0.00%读写5****JOG/SLACK 点动/放松[496]0:OFF ;1:0N OFF 读写5****ENABLE使能[497]0:OFF ;1:0N OFF 读写0×0000~0×FFFF0×00000×0000~0×FFFF[288]读写读写读写读写读写读写加速常数(恒加速)0:DISABLED 禁止;1:ENABLED 使能[004]ENABLED 使能5****CONSTANT ACCEL 5****EXTERNAL RESET 外部复位5****AUTO RESET 自动复位5****REM.SEQ.ENABLE 远程序列使能[535][287]0(1sb): 0×0001远程使能1:0×0002 远程启动2:0×0004 远程点动ENABLED 使能0:FALSE 虚;1:TRUE 实FALSE 虚DISABLED 禁止0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能8:0×0100 远程报警(报警确认)9:0×0200 远程跳闸 (远程/远程跳闸)10:0×0400 保留3:0×0008 远程点动模式(选择点动速度)4:0×0010 保留5:0×0020 保留6:0×0040 保留15:0×8000 保留5****REM.SEQUENCE远程顺序[536]11:0×0800 保留12:0×1000 保留13:0×2000 保留14:0×4000 保留7:0×0080 保留0(1sb): 0×0001惯性停机(惯性停机命令)[537]序列状态****SEQ.STATUS 54***OP-STATION 操作面板5****SET UP 设置6*****SETPOINT设定值[512]0.00~100.00%0.00%读写6*****JOG SETPOINT点动设定值[513]0.00~100.00% 5.00%读写5****START UP VALUES 启动值6*****INITIAL SETPOINT 初始设定值[519]0.00~100.00%0.00%读写5****LOCAL RAMP现场斜坡6*****RAMP ACCEL TIME 斜坡加速时间[514]0.1~600.0 SECS 10.0 SECS 秒读写6*****RAMP DECEL TIME 斜坡减速时间[515]0.1~600.0 SECS10.0 SECS 秒读写4***JOG/SLACK 点动/放松5****JOG SPEED 1点动速度 1[218]-100.00~100.00% 5.00%读写5****JOG SPEED 2点动速度 2[219]-100.00~100.00%-5.00%读写5****TAKE UP 1叠加 1 (拉紧1)[253]-100.00~100.00% 5.00%读写5****TAKE UP 2叠加 2 (拉紧2)[254]-100.00~100.00%-5.00%读写5****CRAWL SPEED 爬行速度[225]-100.00~100.00%10.00%读写5****RAMP RATE 斜坡速率[355]0.1~600.0 SECS1.0 SECS 秒读写4***RAISE/LOWER 上升/下降5****RESET VALUE 复位值[255]-300.00~300.00%0.00%读写5****INCREASE RATE 增加速率[256]0.1~600.0 SECS 10.0 SECS 秒读写5****DECREASE RATE 降低速率[257]0.1~600.0 SECS 10.0 SECS 秒读写5****RAISE INPUT上升输入6*****LOCAL KEY ENABLE[261]0:FALSE 虚;读写读写读写读写FALSE 虚FALSE 虚读写读写读写0:FALSE 虚;1:TRUE 真5.00%0.00~100.00%0:FALSE 虚;1:TRUE 真TRUE 真TRUE 真[516]初始正转方向[520]6*****INITIAL FWD DIRECTION6*****INITIAL JOG SETPOINT 656*****INITIAL LOCAL 初始现场(本控)****MODE 方式0:FALSE 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真*****INITIAL PROGRAM [517]初始编程初始点动设定值现场键启用[511][518][228]1:0×0002 程序停机(程序(快速)停机命令2:0×0004 禁止(禁止/使能命令)3:0×0008 运行(调速器启动命令)4:0×0010 点动(调速器点动命令)5:0×0020 保留(未定义)6:0×0040 报警(未确认的报警)7:0×0080 保留(未定义)8:0×0100 正在运行(接触器合,准备使能)9:0×0200 使能 (调速器使能)10:0×0400 零速(零速输出,标记号17)11:0×0800 正常输出(正常输出,标记号1212:0×1000 准备(准备输出,标记号559)13:0×2000 保留14:0×4000 保留15:0×8000 保留5****MIN VALUE 最小值[258]-300.00~300.00%-100.00%读写5****MAX VALUE最大值[259]-300.00~300.00%100.00%读写4***SPECIAL BLOCKS 专用模块5****DIAMETER CALC.直径计算6*****LINE SPEED 线速度[424]-105.00~105.00%0.00%读写6*****REEL SPEED 卷筒速度[437]-105.00~105.00%0.00%读写6*****MIN DIAMETER 最小直径[425]0.00~100.00%10.00%读写6*****MIN SPEED 最小速度[426]0.00~100.00% 5.00%读写6*****RESET VAIUE 复位值[462]0.00~100.00%10.00%读写6*****RAMP RATE 斜坡率[453]0.1~600.0 SECS 5.0 SECS 秒读写6*****DIAMETER直径[427]0.00~100.00%0.00%只读6*****MOD OF LINE SPD 线速度的模值[428]0.00~105.00%0.00%只读6*****MOD OF REEL SPD 卷筒速度的模值[429]0.00~105.00%0.00%只读6*****UNFILT DIAMETER 未滤波直径[430]0.00~100.00%0.00%只读5****TAPER CALC.锥度计算6*****TAPER锥度[438]-100.00~100.00%0.00%读写6*****TENSION SPT.张力设定值[439]0.00~100.00%0.00%读写6*****TAPERED DEMAND 锥度要求[452]0.00~100.00%0.00%只读6*****TENTION TRIM 张力修正[440]-100.00~100.00%0.00%读写6*****TOT.TENS.DEMAND 总张力给定[441]-100.00~100.00%0.00%只读5****TORQUE CALC.转矩计算6*****TORQUE DEMAND 转矩要求[432]-200.00~200.00%0.00%读写5****SETPOINT SUM 2设定值合计 26*****INPUT 2输入 2[445]-300.00~300.00%0.00%读写6*****INPUT 1输入 1[443]-300.00~300.00%0.00%读写6*****INPUT 0输入 0[444]-300.00~300.00%0.00%读写6*****RATIO 1比率 1[446]-3.0000~3.0000 1.0000读写6*****RATIO 0比率 0[447]-3.0000~3.0000 1.0000读写6*****DIVIDER 1除数 1[466]-3.0000~3.0000 1.0000读写6*****DIVIDER 0除数 0[448]-3.0000~3.0000 1.0000读写6*****LIMIT极限[449]0.00~200.00%100.00%读写6*****SPT SUM OUTPUT 设定值合计输出[451]-200.00~200.00%0.00%只读6*****STPT SUM 2 OUT 0设定值合计 2 输出 0[491]-200.00~200.00%0.00%只读6*****STPT SUM 2 OUT 1设定值合计 2 输出 1[492]-200.00~200.00%0.00%只读5****PID比例-微分-积分6*****PROP.GAIN比例增益[404]0.0~100.0 1.0读写6*****INT. TIME CONST.积分时间常数[402]0.01~100.00SECS 5.00 SECS 秒读写6*****DERIVATIVE TC微分时间常数[401]0.000~10.000SECS 0.000 SECS 秒读写50:FALSE 虚;1:TRUE 真FALSE 虚5****LOWER INPUT 下降输入[262]0:FALSE 虚;1:TRUE 真FALSE 虚****EXTERNAL RESET 外部复位[307]读写1:TRUE 真读写读写EN ABLED 使能DISABLED 禁止读写读写6*****OVER WIND 过卷[434]外部复位*****EXTERNAL RESET 0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能6*****TENSION ENABLE 张力使能[463]6[433]EN ABLED 使能6*****POSITIVE LIMIT 正极限[405]0.00~105.00%100.00%读写6*****NEGATIVE LIMIT 负极限[406]-105.00~0.00%-100.00%读写6*****O/P SCALER(TRIM)输出换算(修正)[407]-3.0000~3.00000.2000读写6*****INPUT 1输入 1[410]-300.00~300.00%0.00%读写6*****INPUT 2输入 2[411]-300.00~300.00%0.00%读写6*****RATRO 1比率 1[412]-3.0000~3.0000 1.0000读写6*****RATRO 2比率 2[413]-3.0000~3.0000 1.0000读写6*****DIVIDER 1除数 1[418]-3.0000~3.0000 1.0000读写6*****DIVIDER 2除数 2[414]-3.0000~3.0000 1.0000读写读写读写6*****INT. DEFEAT 积分失效[409]0:OFF; 1:ON OFF 读写6*****FILTER T.C.滤波器时间常数[403]0.000~10.000SECS 0.100 SECS 秒读写模式[473]0~406*****MIN PROFILE GAIN 最小曲线增益[474]0.00~100.00%20.00%读写6*****PROFILED GAIN 曲线增益(随直径改变后的增益)[475]0.0~100.00.0只读5****TENS+COMP CALC.张力+补偿计算6*****STATIC COMP 静态补偿[487]-300.00~300.00%0.00%读写6*****DYNAMIC COMP 动态补偿[488]-300.00~300.00%0.00%读写6*****FIX.INERTIA COMP 固定惯性补偿[479]-300.00~300.00%0.00%读写6*****VAR.INERTIA COMP 变化惯性补偿[480]-300.00~300.00%0.00%读写6*****ROLL WIDTH/MASS 滚角宽度/质量[481]0.00~100.00%100.00%读写6*****LINE SPEED SPT 线速度设定值[498]-105.00~105.00%0.00%读写6*****FILTER T.C.滤波器时间常数[482]0~2000010读写6*****RATE CAL比率校准[483]-100.00~100.0010.00读写6*****NORMALISED dv/dt 标准(正常化) dv/dt [484]-300.00~300.00%0.00%读写6*****INERTIA COMP O/P 惯性补偿输出[485]XXX.XX %0.00%只读6*****TENSION SCALER 张力换算(器)[486]-3.0000~3.00001.0000读写4***FIELD CONTROL 励磁控制5****FID VOLTAGE VARS 励磁电压变量6*****FLD.VOLTS RATIO 励磁电压(输入/输出)比率[210]0.0~100.0%(h)90.0%读写5****FLD.CURRENT VARS 励磁电流变量6*****SETPOINT 设定值[171]0.00~100.00%100.00%读写6*****PROP. GAIN 比例增益[173]0.00~100.000.10读写6*****INT. GAIN积分增益[172]0.00~100.001.28读写6*****FLD. WEAK VARS 励磁削弱变量0:VOLTAGECONTROL 电压控制1:CURRENTCONTROL 电流控制读写读写读写读写MODE=4时,随直径改变后的增益=A*(直径-最小直径)^4+BMODE=0时,随直径改变后的增益=常数=PMODE=1时,随直径改变后的增益=A*(直径-最小直径)+B CURRENT CONTROL 电流控制0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能[408][489]0:DISABLED 禁止;1:ENABLED 使能6*****REWIND重卷6*****MODEMODE=2时,随直径改变后的增益=A*(直径-最小直径)^2+B MODE=3时,随直径改变后的增益=A*(直径-最小直径)^3+B 5使能5****FLD. CTRL MODE励磁控制方式6[170][209]0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能ENABLED 使能****FIELD ENABLE 励磁使能*****ENABLE7******EMF LEAD 电动势超前[175]0.10~50.00 2.00读写7******EMF LAG 电动势滞后[176]0.00~200.0040.00读写7******EMF GAIN电动势增益[177]0.00~100.000.30读写7******MIN FLD. CURRENT 最小励磁电流[179]0.00~100.00%10.00%读写7******MAX VOLTS最大电压[178]0.00~100.00%100.00%读写7******BEMF FBK LEAD 反电动势反馈超前[191]10~5000(ms)100读写7******BEMF FBK LAG 反电动势反馈滞后[192]10~5000(ms)100读写5****FLD.QUENCH DELAY 励磁断开延时[185]0.0~600.0 SECS 0.0 SECS 秒读写4***CURRENT PROFILE 电流剖面(电流曲线)5****SPD BRK 1 (LOWER)速度中断点1 (低)[032]0.00~100.00%100.0%读写5****SPD BRK 2 (HIGH)速度中断点2 (高)[031]0.00~100.00%100.0%读写5****I MAX BRK 1 (SPD1)电流最大断点1 (速度1)[093]0.00~200.00%(h)200.0%读写5****I MAX BRK 2 (SPD2)电流最大断点2 (速度2)[033]0.00~200.00%(h)200.0%读写4***INVERSE TIME 反向时间5****AIMING POINT 目标点[204]0.00~200.00%110.00%读写5****DELAY 延时[199]0.0~600.0 SECS 10.0 SECS 秒读写5****RATE速率(比率)[200]0.0~600.0 SECS 60.0 SECS 秒读写4***STOP RATES 停机率5****STOP TIME 停机时间[027]0.0~600.0 SECS 10.0 SECS 秒读写5****STOP LIMIT停机极限[217]0.0~600.0 SECS 60.0 SECS 秒读写5****CONTACTOR DELAY 接触器延时[302]0.0~600.0 SECS 1.0 SECS 秒读写5****PROG STOP TIME 程序停机时间[026]0.0~600.0 SECS 0.1 SECS 秒读写5****PROG STOP LIMIT 程序停机极限[216]0.0~600.0 SECS 60.0 SECS 秒读写5****PROG STOP I LIM 程序停机电流极限[091]0.00~200.00%100.00%读写5****STOP ZERO SPEED 停机零速[029]0.00~100.00%2.00%读写4***CALIBRATION校准5****NOM MOTOR VOLTS 标称(额定)电机电压[521]100~875V 100VOLTS 伏特读写5****ARMATURE CURRENT 电枢电流[523] 2.0~15.0AMPS 2.0AMPS 安培读写5****FIELD CURRENT 励磁电流[524]0.2~4.0AMPS 0.2AMPS 安培读写5****ARMATURE V CAL.电枢电压校准[020]0.9800~1.1000 1.0000读写5****IR COMPENSATION I×R 补偿[021]0.00~100.00%0.00%读写5****ENCODER RPM 编码器每分钟转数[022]0~6000RPM 1000 RPM 转/分读写5****ENCODER LINES 编码器线数[024]10~50001000读写5****ANALOG TACH CAL 模拟测速校准[023]0.9800~1.1000 1.0000读写5****ZERO SPD. OFFSET 零速偏置[010]-5.00~5.00%0.00%读写5****SPDFBK ALM LEVEL 速度反馈报警电平[180]0.0~100.0%(h)50.0%读写5****STALL THRESHOLD 堵转阈值[263]0.00~200.00%95.00%读写5****STALL TRIP DELAY 堵转跳闸延时[224]0.1~600.0 SECS 10.0 SECS 读写5****REM TRIP DELAY 远程跳闸延时[541]0.1~600.0 SECS 10.0SECS 秒读写5****OVER SPEED LEVEL过速电平[188]0.00~200.00%125.00%读写读写读写读写读写励磁断开方式[186]组态使能(组态有效)[039]5****FID.QUENCH MODE 5****CONFIGURE ENABLE 5[174]****ARMATURE I (A9)电枢电流(A9)0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止0:QUENCH 断开;1:STANDBY 备用7******FLD.WEAK ENABLE 励磁削弱使能QUENCH 断开[025]0:UNIPOLAR 单极;1:BIPOLAR 双极BIPOLAR 双极0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止5****FIELD I CAL.励磁电流校准[182]0.9800~1.1000 1.0000读写4***INHIBIT ALARMS 禁止报警5****REM TRIP DELAY 远程跳闸延时[541]0.1~600.0 SECS 10.0SECS 秒读写4***CURRENT LOOP电流环5****CUR.LIMIT/SCALER 电流极限/换算(定标)器[015]0.00~200.00%100.00%读写5****MAIN CURR. LIMIT 主电流极限[421]0.00~200.00%200.00%读写5****PROP.GAIN 比例增益[016]0.00~200.0045.00读写5****INT.GAIN 积分增益[017]0.00~200.00 3.50读写5****AUTOTUNE自动调谐[018]0:OFF; 1:ON OFF读写5****FEED FORWARD 前馈[136]0.10~50.00 2.00读写5****DISCONTINUOUS 不连续(断续点)[137]0.00~200.00%12.00%读写5****ADDITIONAL DEM 附加给定[030]-200.00~200.00%0.00%读写5****POS.I CLAMP 正电流箝位[301]-100.00~100.00%0.00%读写5****NEG.I CLAMP 负电流箝位[048]-100.00~100.00%0.00%读写4***SPEED LOOP 速度环5****SPD.PROP.GAIN速度比例增益[014]0.00~200.0010.00读写5****SPD.INT.TIME CONST 速度积分时间常数[013]0.001~30.000SECS 0.500 SECS 秒读写5****INT.DEFEAT 积分失效[202]0:OFF; 1:ONOFF 读写0~3读写读写读写读写读写读写读写读写读写读写读写读写ENABLED 使能读写读写0:INHIBITED 禁止:1:ENABLED 使能INHIBITED 禁止0:FALSE 虚;1:TRUE 真TRUE 真ENABLED 使能ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极2:ENCODER 编码器4Q(REGEN)再生速度反馈报警[081]ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能0:DISABLED 禁止;1:ENABLED 使能励磁故障[019]5555****TRIP RESET [305][028]****5073 RCV ERROR5073接收错误[111]跳闸复位****SPED FBK SELECT速度反馈选择****FIELD FAIL ****STALL TRIP(INHIBIT) 堵转跳闸DISABLED 禁止5****SPEED FBK ALARM 5****ENCODER ALARM 编码器报警[092]5****REM TRIP INHIBIT 远程跳闸禁止[540]50:DISABLED 禁止;1:ENABLED 使能ENABLED 使能5****BIPOLAR CLAMPS 双极箝位[090]电流给定隔离0:0FF =master(主);1:ON =slave(从属)OFF(主)5****REGEN MODE再生方式[201]0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能0: 2Q(NON-REGEN)非再生; 1:4Q(REGEN)再生[119]主桥臂[527]5****ENCODER SIGN 编码器符号(极性)[049]****MASTER BRIDGE 5****I DMD.ISOLATE 0:ARM VOLTS FBK 电枢电压反馈[047]51:ANALOG TACH FBK 模拟测速反馈ARM VOLTS FBK 电枢电压反馈5****SPD.FBK.FILTER 速度反馈滤波器[547]0.000~1.000读写5****ADVANCED 先进功能(高级)6*****ADAPTION 自适应[268]0~30禁止7******SPD BRK1(LOW)速度断点1 (低)[269]0.00~100.00% 1.00%读写7******SPD BRK2(HIGE)速度断点2 (高)[270]0.00~100.00%5.00%读写7******PROP.GAIN 比例增益[271]0.00~200.00 5.00读写7******SPD.INT.TIME 速度积分时间[272]0.001~30.0000.500 SECS 秒读写6*****I GAIN IN RAMP 斜坡电流增益[274]0.0000~2.0000 1.0000读写6*****POS.LOOP P GAIN 位置环比例增益[273]-200.00~200.00%0.00%读写6*****ZERO SPD.QUENCH 零速断开7******ZERO SPD.LEVEL 零速电平[284]0.00~200.00%0.50%读写7******ZERO IAD LEVEL 零负载电流(IAD)电平[285]0.00~200.00%1.50%读写5****SETPOINTS 设定值6*****SETPOINT 1设定点 1[289]-105.00~105.00%0.00%读写6*****RATIO 2 (A3)比率 2 (A3)[007]-3.0000~3.0000 1.0000读写6*****SETPOINT 2 (A3)设定点 2 (A3)[290]-105.00~105.00%0.00%只读6*****SETPOINT 3设定点 3[291]-105.00~105.00%0.00%读写6*****SETPOINT 4设定点 4[041]-105.00~105.00%0.00%读写6*****MAX DEMAND 最大给定[357]0.00~105.00%105.00%读写6*****MIN DEMAND 最小给定[358]-105.00~0.00%-105.00%读写4***STANDSTILL静止5****ZERO THRESHOLD 零阈值[012]0.00~100.00%2.00%读写5****SOURCE TAG 源标记[306]0~49989读写4***SETPOINT SUM 1设定值合计 15****RATIO 1比率 1[006]-3.0000~3.00001.0000读写5****RATIO 0比率 0[208]-3.0000~3.00001.0000读写5****DIVIER 1除数 1[419]-3.0000~3.0000 1.0000读写5****DIVIER 0除数 0[420]-3.0000~3.00001.0000读写5****DEADBAD WIDTH 死区宽度[131]0.0~100.0%0.0%读写5****LIMIT 极限[375]0.00~200.00%105.00%读写5****INPUT 2输入 2[423]-200.00~200.00%0.00%读写5****INPUT 1输入 1[100]-200.00~200.00%0.00%读写5****INPUT 0输入 0[309]-200.00~200.00%0.00%读写读写读写读写读写读写[008]5****SIGN 15****SIGN 0符号 0[292]符号 1静止逻辑5****STANDSTILL LOGIC [011][009]0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极6*****SING 2 (A3)0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止3:ENCODER/ANALOG 编码/模拟组合反馈7******MODE 方式1:SPD FBK DEPENDENT 与速度反馈有关2:SPD ERROR DEPENDENT 与速度误差有关3:CUR.DEMAND DEPENDENT 与电流给定有关0:DISABLED 禁止;0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极0:NEGATIVE 负极;1:POSITIVE 正极POSITIVE 正极符号 2 (A3) (极性)3**PASSWORD 口令4***ENTER PASSWORD 输入口令[120]0×0000~0×FFFF 0×0000读写4***CHANGE PASSWORD 改变口令[121]0×0000~0×FFFF0×0000读写3**ALARM STATUS 报警状态最后报警[528]0×0000: 无现行报警0×0001: 超速0×0002: 丢失脉冲0×0004: 励磁电流0×0008: 散热器过热跳闸0×0010: 电机热敏电阻0×0020: 过压(VA)0×0040: 速度反馈0×0080: 编码器故障0×0100:励磁故障0×0200: 三相故障0×0400: 锁相环4***HEALTH WORD 正常字[115]0×00000×8218只读4***HEALTH STORE正常存储[116]0×00000×0000只读4***THERMISTOR STATE 热敏电阻状态 (未分配)[337]只读4***SPEED FBK STATE 速度反馈状态 (未分配)[472]只读3**MENUA 菜单4***MENU DELAY 菜单延时[038]0~6553531读写4***LANGUAGE 语言5****ENGLISH英语3**PARAMETER SAVE 参数储存3**SERIAL LINKS 串行连接4***MAIN PORT (P1)主通讯口 (P1)5****GROUP ID (GID)集群号(GID)[138]0读写5****UNIT ID (UID)单元号(UID)[139]0读写ASC ⅡBINARY 二进制OPTION 任选5****PROTOCOL(通讯)协议[148]EI ASC Ⅱ读写只读只读读写读写读写只读4***LAST ALARM4远程跳闸0×f006:PCB 版本0×ff06:产品代码0×f001:自动调谐失灵(中止)[526]4***BY-PASS PASSWORD 0:FALSE 虚;1:TRUE 真忽略口令 保留4***FULL MENUS 4***STALL TRIP 全菜单5****SRL LINK ENABLE 0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能串行连接使能(启动)[146]0:DISABLED 禁止;1:ENABLED 使能ENABLED 使能***REMOTE TRIPFALSE 虚0×0000[542]堵转跳闸[112]0:0K 正确1:FAILED 失败OK 正确0:FALSE 虚;1:TRUE 真0×ff05:远程跳闸0×f200: 配置使能0×f400: 无操作面板0×0800: 5703接收错误0×1000: 堵转跳闸0×2000: 过电流跳闸0×f005: 外部跳闸0×8000: 交流互感器故障0×f001:自动调谐失误[037]300; 600; 1200; 24004800; 9600(缺省);192005****ESP SUP. (ASCⅡ)ESP支持(ASC Ⅱ)[152]DISABLED 读写5****CHANGEBAND (BIN)改变带(BIN)[144]0.00~327.67%0.00%读写5****ERROR REPORT 出错报告[158]0×0000~0×FFFF 0×00C0读写5****PNO. 7参数号7[142]0×0000~0×FFFF0×FFFF 读写5****OPTION ADDRESS 任选地址[499]0~327670读写5****OPTION VERSION 任选版本[303]0.00~99.990.00只读5****PARITY奇偶校验[334]ODD 奇/EVEN 偶EVEN 偶读写4***AUX PORT (P2)辅助通讯口(P2)5****SRL LINK ENABLE 串行连接使能(启动)[147]ENABLED读写5****GROUP ID (GID)集群号(GID)[140]0读写5****UNIT ID (UID)单元号(UID)[141]0读写5****PROTOCOL (通讯)协议[149]EI ASC Ⅱ读写5****BAUD RATE波特率[151]9600读写5****ESP SUP. (ASCⅡ)ESP支持(ASC Ⅱ)[153]DISABLED 读写5****CHANGEBAND (BIN)改变带(BIN)[145]0.00%读写5****ERROR REPORT 出错报告[159]0×00C0读写5****PNO. 7参数号7[143]0×FFFF 读写4***TEC OPTION技术任选项0: NONE1: RS4852: PROFIBUS DP 3: LINK 4: DEVICE NET 5: CAN OPEN 6: LON WORKS 7: TYPE 75****TEC OPTION IN 1技术任选输入 1[501]-32768~327680读写5****TEC OPTION IN 2技术任选输入 2[502]-32768~327680读写5****TEC OPTION IN 3技术任选输入 3[503]-32768~327680读写5****TEC OPTION IN 4技术任选输入 4[504]-32768~327680读写5****TEC OPTION IN 5技术任选输入 5[505]-32768~327680读写5****TEC OPTION FAULT 技术任选故障[506]NONE 只读5****TEC OPTION VER 技术任选版本[507]0×0000~0×FFFF 0×0000只读5****TEC OPTION OUT 1技术任选输出 1[508]0只读5****TEC OPTION OUT 2技术任选输出 2[509]只读4***SYSTEM PORT (P3)系统通讯口(P3)5****P3 SETUP P3设置0~30:DISABLED 禁止;1:5703MASTER 主机2:5703SLAVE 从机3:CELite(EIASC Ⅱ)6*****5703 SUPPORT 5703支持7******SETPT.RATIO 设定值比率[132]-3.0000~3.00000.0000读写DISABLED 禁止读写6*****MODE方式[130][150]9600读写5****TEC OPTION TYPE技术任选类型[500]NONE读写****BAUD RATE 5波特率7******5703 INPUT 5703输入[187]-300.00~300.00%0.00%只读******5703 OUTPUT5703输出[189]-300.00~300.00%0.00%只读******SCALED 5703 DATA 转换后5703数据[189]0.00%只读6*****BISYNCE SUPPORT 双同步支持7******GROUP ID (GID)集群号(GID)[329]0×0000~0×00070读写7******UNIT ID (UID)单元号(UID)[330]0×0000~0×000F0读写7******ESP SUP.(ASCⅡ) ESP支持(ASC Ⅱ)[328]DISABLED 禁止读写7******CHANGEBAND (BIN)改变带(BIN)[331]0.00%读写7******ERROR REPORT 出错报告[332]0×0000~0×FFFF0×00C0读写7******PNO. 7参数号7[333]0×0000~0×FFFF0×FFFF 读写6*****P3 BAUD RATE P3波特率[198]300~576009600读写5****DUMP MMI -> P3将MMI 信息传送给上位机5****DUP XFER <- P3从上位机传送数据给驱动器5****DUP XFER -> P3驱动器向上位机传送数据5****DUMP MMI (TX)将MMI信息传送给上位机6*****UP TO ACTION 直到作用5****DUP XFER (RX)从上位机传送数据给驱动器6*****UP TO ACTION 直到作用5****DUP XFER (TX)驱动器向上位机传送数据6*****UP TO ACTION直到作用54***PNO CONFIG 参数号配置5****PNO 112参数号 112[312]0~549354 (0)读写5****PNO 113参数号 113[313]0~54922 (0)读写5****PNO 114参数号 114[314]0~549209 (0)读写5****PNO 115参数号 115[315]0~54918 (0)读写5****PNO 116参数号 116[316]0~549170 (0)读写5****PNO 117参数号 117[317]0~54919 (0)读写5****PNO 118参数号 118[318]0~549174 (0)读写5****PNO 119参数号 119[319]0~54947 (0)读写5****PNO 120参数号 120[320]0~549304 (379)读写5****PNO 121参数号 121[321]0~54932 (380)读写5****PNO 122参数号 122[322]0~54933 (381)读写5****PNO 123参数号 123[323]0~54931 (382)读写5****PNO 124参数号 124[324]0~54924 (383)读写5****PNO 125参数号 125[325]0~54949 (384)读写5****PNO 126参数号 126[326]0~549201 (385)读写5****PNO 127参数号 127[327]0~549210 (0)读写3**SYSTEM系统4***SOFTWARE软件5****ENGLISH Nov 11 194***CONFIGURE I/O 配置输入/输出读写读写[039]0:DISABLED 禁止;1:ENABLED 使能DISABLED 禁止5****CONFIGURE ENABLE组态(配置)使能7******SETPT.SIGN 设定值符号****Serial Link Version Number 串行连接版本号 (未分配)0:NEGATIVE 负极;1:POSITIVE 正极[155]0×0000~0×FFFFPOSITIVE 正极[133]75****ANALOG INPUTS 模拟输入6*****ANIN 1 (A2)模拟输入 1 (A2)7******CALIBRTION 校准[230]-3.0000~3.0000 1.0000读写7******MAX VALUE 最大值[231]-300.00~300.00%100.00%读写7******MIN VALUE最小值[232]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[246]0~549100读写6*****ANIN 2 (A3)模拟输入 2 (A3)7******CALIBRTION 校准[233]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[234]-300.00~300.00%100.00%读写7******MIN VALUE 最小值[235]-300.00~300.00%-100.00%读写7******OUTPUT输出[493]XXXX.X %只读6*****ANIN 3 (A4)模拟输入 3 (A4)7******CALIBRTION 校准[236]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[237]-300.00~300.00%100.00%读写7******MIN VALUE最小值[238]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[249]0~5495读写6*****ANIN 4 (A5)模拟输入 4 (A5)7******CALIBRTION 校准[239]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[240]-300.00~300.00%100.00%读写7******MIN VALUE最小值[241]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[250]0~54948读写6*****ANIN 5 (A6)模拟输入 5 (A6)7******CALIBRTION 校准[242]-3.0000~3.00001.0000读写7******MAX VALUE 最大值[243]-300.00~300.00%100.00%读写7******MIN VALUE最小值[244]-300.00~300.00%-100.00%读写7******DESTINATION TAG 目的标记[247]0~549301读写5****ANALOG OUTPUTS 模拟输出6*****ANOUT 1 (A7)模拟输出 1 (A7)7******% TO GET 10V 获得10V 的百分数[245]-300.00~300.00%100.00%读写7******OFFSET偏置[464]-100.00~100.00%0.00%读写7******SOURCE TAG 源标记[251]0~54962读写6*****ANOUT 2 (A8)模拟输出 2 (A8)7******% TO GET 10V 获得10V 的百分数[248]-300.00~300.00%100.00%读写7******OFFSET偏置[465]-100.00~100.00%0.00%读写7******SOURCE TAG 源标记[252]0~54963读写5****DIGITAL INPUT数字输入6*****DIGITAL INPUT C4数字输入 C47******DESTINATION TAG 目的标记[494]0~549496读写6*****DIGITAL INPUT C5数字输入 C57******DESTINATION TAG 目的标记[495]0~549497读写6*****DIGIIN 1 (C6)数字输入 1 (C6)7******VALUE FOR TRUE “真”值[103]-300.00~300.00%0.01%读写7******VALUE FOR FALSE“虚”值[104]-300.00~300.00%0.00%读写读写读写7******MODULUS 模件0:FALSE 虚;1:TRUE 真FALSE 虚0:FALSE 虚;1:TRUE 真FALSE 虚[362][363]7******MODULUS 模件6*****DIGIIN 2 (C7)数字输入 2 (C7)7******VALUE FOR TRUE “真”值[106]-300.00~300.00%0.01%读写7******VALUE FOR FALSE “虚”值[107]-300.00~300.00%0.00%读写7******DESTINATION TAG 目的标记[105]0~549118读写6*****DIGIIN 3 (C8)数字输入 3 (C8)7******VALUE FOR TRUE “真”值[109]-300.00~300.00%0.01%读写7******VALUE FOR FALSE “虚”值[110]-300.00~300.00%0.00%读写7******DESTINATION TAG 目的标记[108]0~549119读写5****DIGITAL OUTPUT 数字输出6*****DIGOUT 1 (B5)数字输出 1 (B5)7******THRESHOLD (>)阈值(>)[195]-300.00~300.00%0.00%读写7******SOURCE TAG 源标记[097]0~54977读写6*****DIGOUT 2 (B6)数字输出 2 (B6)7******THRESHOLD (>)阈值(>)[196]-300.00~300.00%0.00%读写7******SOURCE TAG 源标记[098]0~549122读写6*****DIGOUT 3 (B7)数字输出 3 (B7)7******THRESHOLD (>)阈值(>)[197]-300.00~300.00%0.00%读写7******SOURCE TAG 源标记[099]0~549125读写6*****CONFIGURE 57035703配置(组态)7******SOURCE TAG源标记[134]0~54989读写7******DESTINATION TAG 目的标记[135]0~54941读写5****BLOCK DIAGRAM 方框图(组态)6*****RAISE/LOWER DEST 上升/下降目的(号)[260]0~5490读写6*****RAMP O/P DEST 斜坡输出目的(号)[293]0~549291读写6*****SPT SUM 1 DEST 设定值合计1目的(号)[294]0~549289读写6*****PID O/P DEST PID 输出目的(号)[400]0~5490读写6*****DIAMETER 直径[431]0~5490读写6*****TAPER锥度[422]0~5490读写6*****SETPOINT SUM 2设定值合计2[450]0~5490读写6*****POS. I CLAMP 正电流箝位[435]0~5490读写6*****NEG. I CLAMP 负电流箝位[436]0~5490读写6*****TENS+COMP CALC.张力+补偿计算[478]0~549读写5****INTERNAL LINKS 内部连接6*****LINK 1连接 17******SOURCE TAG源标记[364]0~549读写读写读写读写读写读写读写非FALSE 虚0:FALSE 虚;1:TRUE 真[361]******MODULUS 7******INVERTED 模件[045]0:FALSE 虚;1:TRUE 真TRUE 真0:FALSE 虚;1:TRUE 真TRUE 真0:FALSE 虚;1:TRUE 真FALSE 虚非[360]0:FALSE 虚;1:TRUE 真FALSE 虚7******MODULUS 模件[044]7******INVERTED 非[359]0:FALSE 虚;1:TRUE 真TRUE 真7******MODULUS 模件[043]7******INVERTED 76*****LINK 2连接 27******SOURCE TAG源标记[366]0~5490读写7******DESTINATION TAG 目的标记[367]0~5490读写6*****LINK 3连接 37******SOURCE TAG源标记[368]0~5490读写7******DESTINATION TAG 目的标记[369]0~5490读写6*****LINK 4连接 47******SOURCE TAG源标记[370]0~5490读写7******DESTINATION TAG 目的标记[371]0~5490读写6*****LINK 5连接 57******SOURCE TAG源标记[454]0~5490读写7******DESTINATION TAG 目的标记[455]0~5490读写6*****LINK 6连接 67******SOURCE TAG源标记[456]0~5490读写7******DESTINATION TAG 目的标记[457]0~5490读写6*****LINK 7连接 77******SOURCE TAG源标记[458]0~5490读写7******DESTINATION TAG 目的标记[459]0~5490读写6*****LINK 8连接 87******SOURCE TAG源标记[460]0~5490读写7******DESTINATION TAG 目的标记[461]0~5490读写6*****LINK 9连接 97******SOURCE TAG源标记[467]0~5490读写7******DESTINATION TAG 目的标记[468]0~5490读写6*****LINK 10连接 107******SOURCE TAG源标记[469]0~5490读写7******DESTINATION TAG 目的标记[470]0~5490读写6*****LINK 11连接 117******SOURCE TAG源标记[390]0~5490读写7******DESTINATION TAG 目的标记[391]0~5490读写7******ADVANCED 高级(先进)[392]0:OFF; 1:ONOFF 读写0~60:SWITCH 转换1:INVERTER 非2:AND 与3:OR 或5:MODULUS 模值7******AUX. SOURCE 辅助源[394]0~5490读写6*****LINK 12连接 127******SOURCE TAG源标记[395]0~5490读写7******DESTINATION TAG 目的标记[396]0~5490读写7******ADVANCED 高级(先进)[397]0:OFF; 1:ON OFF 读写0~60:SWITCH 转换1:INVERTER 非2:AND 与3:OR 或读写读写SWITCH7******MODE 方式[398]6:COMPARATOR 比较器******MODE 方式[393]4:SIGN CHANGER 符号改变SWITCH7。
欧陆590直流调速器调试步骤学习资料
欧陆590直流调速器调试步骤学习资料欧陆590直流调速器调试步骤目录型号说明 (2)操作面板的使用 (3)接线 (4)1、主回路接线 (4)2、控制端子接线 (5)3、查看控制端子配置 (7)默认控制端子基本接线 (8)必要的修改参数 (10)浏览内部设置 (11)系统菜单目录 (13)通电运行 (15)中英文对照报警说明 (16)附录参数表 (24)一、型号说明二、操作面板的使用。
面板示意图三、接线1、主回路接线(1)L、N(辅助电流输入。
作为控制器控制电源输入)端子接AC220V 为控制电路供电。
(2)L1、L2、L3(三相主电源输入)接AC380V为主电路供电。
(3)A+、A-(电枢输出,A+正极,A-负极)接电枢端口。
(4)F+、F-(励磁输出。
F-为负,F+为正。
)接励磁端口。
上述端子一般分布图2、控制端子接线。
(1)、模拟端子A1 零伏电位,与 B1、C1 同电位,与地线隔离。
A2 模拟输入 1。
默认功能为速度输入,可修改。
A3 模拟输入 2。
默认功能为辅助速度或电流输入,在默认功能下,由 C8 来切换其输入功能。
C8 低态时为速度输入量,C8 高态时为电流量(电流控制方式),不可修改。
A4 模拟输入 3。
默认功能为斜坡速度输入,可修改。
A5 模拟输入4。
默认功能为辅助(负)电流箝位,默认功能下由C6 确定其是否使用。
C6 为低态时不使用此功能,C6 为高态时使用其功能来对负电流进行箝位。
可修改。
A6 模拟输入5。
默认功能为主电流箝位或辅助(正)电流箝位,默认功能下由 C6 切换其输入功能,C6 为低态时为主电流箝位,同时作用于正负电流的箝位,可修改。
A7 模拟输出 1。
默认功能为速度反馈输出,可修改。
A8 模拟输出 2。
默认功能为速度给定输出,可修改。
A9 模拟输出 3。
默认功能为电流反馈输出,不可修改。
(2)数字端子B5 数字输出1,默认功能为电机零速检测,当电机零速时为高态(+24V 输出),当电机运转时为低态(0V 输出)可修改。
欧陆590系列参数说明表

5
AUX DIGOUT 1
5
AUX DIGOUT 2
5
AUX DIGOUT 3
5
ANOUT 1
5
ANOUT 2
5
JOG/SLACK
5
ENABLE
5
REM.SEQ.ENABLE
5
REM.SEQUENCE
斜坡输入 S斜坡百分数 斜坡阈值 自动复位
外部复位
复位值 最小速度
辅助输入/输出
辅助启动 辅助点动 辅助使能 辅助数字输出 1 辅助数字输出 2 辅助数字输出 3 模拟输出 1 模拟输出 2 点动/放松 使能 远程序列使能
6
ROLL WIDTH/MASS
6
LINE SPEED SPT
6
FILTER T.C.
6
RATE CAL
6
NORMALISED dv/dt
6
INERTIA COMP O/P
6
TENSION SCALER
4
FIELD CONTROL
5
FIELD ENABLE
5
FLD. CTRL MODE
5
FID VOLTAGE VARS
6
SETPOINT
6
JOG SETPOINT
6
LOCAL KEY ENABLE
5
START UP VALUES
6
INITIAL SETPOINT
6
INITIAL JOG SETPOINT
6
INITIAL FWD DIRECTION
6
INITIAL PROGRAM
6
INITIAL LOCAL
5
LOCAL RAMP
新欧陆SSD590调速器中英文对照报警说明

枢电流过高—检
查电机铭牌上的
标称电流和调速
器的电流标准。
注释:要重启调
速器,必须使堆
栈降温报警时间
延迟:0.75 秒
电机温度传 4 THERMISTOR
感器
OVERVOLTS 过电压
5
(VA)
(VA)
0x10 0x20
通风不够,风机 故障—检查方 向,空气滤波器 阻塞(超过70A 额定电桥的模 型)电枢电流过 高—检查铭牌上 的标称电枢电流 和电流标准 注释:要重启调 速器,必须使电 机降温.报警延迟 时间:1.5 秒
操作站
XF100
CAM
FULL INIT
错误
0XF100 未
行
OPCODE
0XF100
14
NMI 错误
0XF100 软
件陷阱错误
动调整序列期间
复位。自动调整
序列已经超时
(接近2
分
钟)。
“远程序 列”(REM SEQUENCE) 参数的“远程跳 闸”标记设为0
在“配置”模式 下,调速器被要 求启动
校准故障
回路调整不良,调 速器故障—参阅 欧陆传动系统说 明
14
Not used 校正插件板
交流电互感 15 ACCTS FAILED 器故障*
自动调整中
AUTOTUNE 止
14
ABORT
自动调整序
0x4000
0x8000
检查电枢电流变 压器插头的正确 安装,只有5 型:两个并行的 电源堆栈间负载 不平衡,注意: 在没有电枢电流 反馈的情况下, 跳闸会阻止接触 器关闭和电流回 路的激活--在晶 闸管堆栈远离控 制板的情况下使 用外部堆栈控制 器时这一点很重 要。
590直流驱动器
作者: yaku 时间: 2008-8-25 20:17 标题: 欧陆590驱动器的维修与应用为了方便大家对欧陆590驱动器的维修与应用进行交流经验,我开擗了这篇文章希望大家能支持一下。
我本人主要的是对驱动器的应用研究的多一点,对于维修就比校外行,通过本论坛也许能学到一些维修知识。
我先说一下欧陆590驱动器一些基础知识,也许这些对于老手来说是不值得看,但我希望能对新人有所帮助。
说明书上有的我不多说,主说一下说明书里面没有的(但有那位朋友问到其他的一些问题我会尽我所能回答)。
内部组态一般的都会有密码(即进入口命),在欧陆590中有一个特别密码可以打开一般用户设置的密码,有了它不论是那一台590都可以避开原用户密码进入内部组态进行设置参数。
资料下载地址:/Subject.asp?zhtid=5//index.asp速度仪校准板与电机转速的关系用直流测速电机作反馈源,对应的就是测速仪校准板了。
此板支援校准范围为10—199V的交流和直流模拟测速电机。
测速仪校准电压,用两个10路直排开关为个位和十位。
用一个1路开关为百位。
校准板的设置电压直、测速电机的最高转速/最高电压和主电机的最高转速,三者之间是有一固定的计算公式的。
用此公式就可以计算出主电机在额定转速下,所要校准板的设置电压值。
设用此公式计算出主电机额定转速下校准板的电压值为V,V1大于V,V2小于V,那么:当把V1作为校准板的设置电压值时,在最高速度时主电机会运转在额定转速之上,那是不允许的;当把V2作为校准板的设置电压值时,主电机就会运转在小于额定转速之内;就是说如果把V作为校准板的设置值时,主电机就会运转在额定转速以内,这是我们需要的。
此公式是:V校准=(V测÷R测)×R主V校准:校准板的设置电压值;V测:测速电机的额定电压值;R测:测速电机的额定转速;R主:主电机的额定转速。
例:一直流电机额定转速为540—1200R/mian,测速电机额定转速为2000R/mian,额定电压为110V,请设置校准板的对应电压值。
欧陆590主从控制应用

欧陆590主从控制应用一、菜单进入口命内部组态一般的都会有密码(即进入口命),在欧陆590中有一个特别密码可以打开一般用户设置的密码,有了它不论是那一台590都可以避开原用户密码进入内部组态进行设置参数。
此密码是:0x1311(“0x”表示16进)。
二、速度仪校准板与电机输出功率的关系用直流测速电机作反馈源,对应的就是测速仪校准板了。
此板支援校准范围为10―199v的交流和直流模拟测速电机。
测速仪校准电压,用两个10路直排开关为个位和十位。
用一个1路开关为百位。
校准板的设置电压直、测距电机的最低输出功率/最低电压和主电机的最低输出功率,三者之间就是存有一紧固的计算公式的。
用此公式就可以排序杨开第电机在额定输出功率下,所必须校准板的设置电压值。
设用此公式排序杨开第电机额定输出功率下校准板的电压值v,v1大于v,v2大于v,那么:当把v1作为校准板的设置电压值时,在最高速度时主电机会运转在额定转速之上,那是不允许的;当把v2做为校准板的设置电压值时,主电机就可以运转在大于额定输出功率之内;就是说如果把v作为校准板的设置值时,主电机就会运转在额定转速以内,这是我们需要的。
此公式就是:v校准=(v测÷r测)×r主v校准:校准板的设置电压值;v测:测距电机的额定电压值;r测:测距电机的额定输出功率;r主:主电机的额定输出功率。
例:一直流电机额定转速为540―1200r/mian,测速电机额定转速为2000r/mian,额定电压为110v,请设置校准板的对应电压值。
v校准=(v测÷r测)×r主=110÷2000×1200=66(v)即:校准板的设置电压为66v。
三、速度调整在采用电机时,很多时候辨认出电机的提减速时间不理想,对生产导致一定的影响。
为此就要把电机的加减速时间作些调整。
如何调整电机的加减速时间?下面就针对欧陆590驱动器说一下调整方法。
欧陆590中英文参数对照表

%TO GET 10V
得到10V的百分数
361
INVERTED
“非”
465
OFFSET
CALIBRATION
校准
103
VALUE FOR TRUE
“真”的值
249
DESTINA TION TAG
目的标记
配置输入输出::数字输入::DIGIN 2(C7)
237
MAX V ALUE
最大值
105
DESTINATION TAG
目的标记
238
MIN VALUE
最小值
107
VALUE FOR FALSE
360
INVERTED
“非”
464
OFFSET
偏置
44
MODULUS
模件
362
MODULUS
模件
98
SOURCE TAG
源标记
251
SOURCE TAG
源标记
196
THRESHOLD (>)
阀值(>)
配置输入输出::模拟输出::ANOUT 2(A8)
配置输入输出::数字输出::DIGOUT 3(B7)
设定值357maxdemand最大要求358mindemand最小要求7ratio2a3比率2a3289setpoint1设定值1290setpoint2a3设定值2291setpoint3设定值341setpoint4设定值49sign2a3符号2a3speedloop速度环47speedfbkselect速度反馈选择standstill静止306sourcetag源标记11standstilllogic静止逻辑12zerothreshold零阀值stoprates停机率302contactordelay接触器延时91progstopilim程序停机电流限幅216progstoplimit程序停机极限26progstoptime程序停机时间217stoplimit停机极限27stoptime停机时间29stopzerospeed停机零速欧陆590中英文参数对照表陕西科达电气有限公司44system系统配置输入输出
欧陆590直流驱动器参数设置与查看

欧陆590直流驱动器参数设置与查看欧陆590直流驱动器参数设置与查看一、参数设置1. 按M直到出现DIAGNOSTICS(诊断)2. 按向上的键,找到CONFIGURE DRIVE(配置调速器)。
3. 按M键进入菜单,找到CONFIGURE ENABLE (组态有效)按M键进入菜单,将DISABLE (不允许),改成ENABLE(允许),此时面板闪烁,按E键退出。
4. 按向下的键,找到NOM MOTOR VOLTS(电枢电压),按M 键进入,输入额定电枢电压。
按E键退出。
(设置电枢电压)5. 按向下的键,找到ARMATURE CURRENT(电枢电流),按M 键进入菜单,输入额定电流,按E键退出。
(设置电枢电流)6. 按向下的键,找到FIELD CURRENT(励磁电流),按M 键进入菜单,输入励磁电流,按E键退出。
(设置励磁电流)7. 按向下的键,找到FLD CTRL MODE(励磁控制方式),按M键进入菜单,把VOLTAGE CONTROL(电压控制)改成CURRENT CONTROL(电流控制)。
按 E 键退出(设置励磁控制方式)8. 按向下键,找到SPEED FBK SELECT(速度反馈选择),按 M 进入菜单,按向上或向下选择ARM VOLTS(电枢电压反馈)、ANALOG TACH (测速反馈)或ENCODER(编码反馈),选择反馈方式是根据所选的配件板及实际电机使用的反馈方式,然后按E 退出。
(设置速度反馈)9. 按M键,进入菜单,找到CONFIGURE ENABLE (组态有效)按M键进入菜单,将ENABLE(允许)DISABLE (不允许),改成DISABLE (不允许),此时面板不再闪烁,按E键退出。
二、参数保存按M键,直到出现DIAGNOSTICS(诊断)后,按向上的键找到PARAMETER SAVE,按M键显示PARAMETER SAVE UP TO ACTION,然后按向上的键,出现PARAMETER SAVE FINISH,参数保存完成。
590直流电机驱动器中英参数对照表

MAIN CURR.LIMT(主电流限制) ADVANCED(高级)
SETPOINTS(设定值)
ADAPTION(匹配) ZERO SPD.QUENCH(零速抑制)
P3 SETUP(P3设定) ANALOG INPUTS(模拟量输入)
5703 SUPPORT(5703支持) BISYNCH SUPPORT(BISYNCH协MAX VALUE MIN VALUE DESTINATION TAG
%T0 GET 10V MODULUS(模数) OFFSET(偏移) SOURCE TAG(源标记编 号)
VALUE FOR TRUE VALUE FOR FALSE DESTINATION TAG
ANIN 1 (A2)(模拟量输入1(A2))
ANALOG OUTPUTS(模拟量输出)
ANIN 5 (A6)(模拟量输入5(A6)) ANOUT 1 (A7)(模拟量输出1(A7))
DIGITAL INPUTS(数字量输入)
ANOUT 2 (A8)(模拟量输出2(A8)) DIGITAL INPUT C4(数字量输入C4) DIGITAL INPUT C5(数字量输入C5) DIGIN 1 (C6)(数字量输入1(C6)) DIGIN 2 (C7)(数字量输入2(C7)) DIGIN 3 (C8)(数字量输入3(C8))
DIGITAL OUTPUTS(数字量输出)
DIGOUT 1 (B5)(数字量输出1(B5)) DIGOUT 2 (B6)(数字量输出2(B6)) DIGOUT 3 (B7)(数字量输出3(B7))
CONFIGURE 5703(配置5703) BLOCK DIAGRAM(框图)
RAISE/LOWER DEST(上升与下降目的 地) RAMP O/P DEST(斜坡输出目的地) SPT SUM1 DEST(设定值求和1目的 地) PID O/P DEST(PID输出目的地) DIAMETER(直径) TAPER(锥度)
欧陆590C文档

590调速器实现正反转控制(不用调换电位)590调速器通过数字量端口实现正反转控制方法(只适用于可逆调速器):主要用调速器的设定合计值1来实现,模拟量输入端口使用A4口,正反转控制选用C8口,组态前请将SYSTEM--CONFIGURE--CONFIGURE I/O 下面的DISABLE改成ENABLE ,组态结束后,请将ENABLE改回到DISABLE,并记得保存参数(PARAMETER SA VE,按M进入,按向上箭头就会自动保存)1.将A4口的目的标记改成309(设定合计值1的输入0的目的标记),SYSTEM--CONFIGURE--ANALOG INPUTS --ANIN3(A4)---DESTINATION TAG--改到309.2.将C8的目的标记改成292(设定合计值1的符号0的目的标记).SYSTEM--CONFIGURE--DIGITAL OUTPUTS--DIGIN2(C8)---DESTINATION TAG --改到292.3.通过切换C8的状态,(高低电平)我们就可以实现调速器正反转控制了.利用设定合计值1的输入1也可以实现正反转控制,只需要将模拟量给定接到A2,将C8的目的标记改成8(设定合计值1输入1的符号1)(590C)直流调速器参数快速设置说明*CT-400C(590C)直流调速器送上控制电源开机后按M键出现DIAGNOSTIS后按向下键头找到SET UP PARAMETERS(设定参数),按M键进入菜单,按向下键找到FIELD CONTROL (励磁控制),按M键进入找到FLD.CTRL MODE(励磁控制方式),按M键进入菜单,把VOLTAGE CONTROL(电压控制)改成CURRENT CONTROL(电流控制),按两次E键退出;按向下键头找到SPEED LOOP(速度环),按M键进入,按向下键找到SPEED FBK SELECT(速度反馈选择),按M进入菜单,按向上或向下键选择ARM VOLTS(电枢电压反馈)、ANALOG TACH(测速反馈)或ENCODER(编码反馈),选择反馈方式是根据所选的配件板及实际电机使用的反馈方式;按E键退出.*CT-400C(590C)直流调速器自动调节步骤(此过程一定不能少):手动去掉电机的励磁(如果是内部励磁,则不用去掉励磁线,调速器会自动禁止磁场),为电机做一次自动调节,为了防止电机有剩磁,请夹紧电机的轴,然后在SET UP PARAMETERS(设定参数)下面找到CURRENT LOOP(电流环),按M键进入后,按上下箭头找到AUTOTUNE菜单,按M键进入,将OFF改为ON(新版本是ARMATURE),然后在10秒内启动调速器,此时调速器的RUN 灯将闪烁,在这个过程中请不要给调速器停止信号和速度给定信号。
欧陆590速度控制参数设置明细
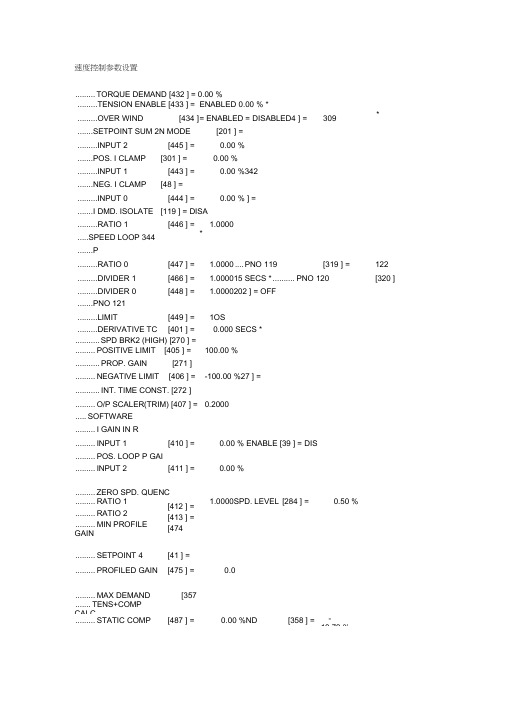
速度控制参数设置......... TORQUE DEMAND [432 ] = 0.00 %.........TENSION ENABLE [433 ] = ENABLED 0.00 % *.........OVER WIND [434 ] = ENABLED = DISABLED4 ] = 309* .......SETPOINT SUM 2N MODE [201 ] =.........INPUT 2 [445 ] = 0.00 %.......POS. I CLAMP [301 ] = 0.00 %.........INPUT 1 [443 ] = 0.00 %342.......NEG. I CLAMP [48 ] =.........INPUT 0 [444 ] = 0.00 % ] =.......I DMD. ISOLATE [119 ] = DISA.........RATIO 1 [446 ] = 1.0000.....SPEED LOOP 344 *.......P.........RATIO 0 [447 ] = 1.0000 .... PNO 119 [319 ] = 122 .........DIVIDER 1 [466 ] = 1.000015 SECS * .......... PNO 120 [320 ] .........DIVIDER 0 [448 ] = 1.0000202 ] = OFF.......PNO 121.........LIMIT [449 ] = 1OS.........DERIVATIVE TC [401 ] = 0.000 SECS *........... SPD BRK2 (HIGH) [270 ] =......... POSITIVE LIMIT [405 ] = 100.00 %........... PROP. GAIN [271 ]......... NEGATIVE LIMIT [406 ] = -100.00 %27 ] =........... INT. TIME CONST. [272 ]......... O/P SCALER(TRIM) [407 ] = 0.2000..... SOFTWARE......... I GAIN IN R......... INPUT 1 [410 ] = 0.00 % ENABLE [39 ] = DIS......... POS. LOOP P GAI......... INPUT 2 [411 ] = 0.00 %......... ZERO SPD. QUENC......... RATIO 1 ......... RATIO 2 ......... MIN PROFILE GAIN [412 ] =[413 ] =[4741.0000SPD. LEVEL [284 ] = 0.50 %......... SETPOINT 4 [41 ] =......... PROFILED GAIN [475 ] = 0.0......... MAX DEMAND [357....... TENS+COMPCALC.......... STATIC COMP [487 ] = 0.00 %ND [358 ] = -18.79 %[488 ] = 0.00 %..STANDSTILL 0 [489 ] = ENA...ANIN 4 (A5)....... TENSION SCALER [486 ] = 1.00000 % ....... ANALOG OUTPUT..... FIELD CONTROL [375 ] = ....... FIELD ENABLE [170 ] = ....... INPUT 2 [423....... FLD CTRL MODE IS [209 ] = CURRE....... PROG STOP LIMIT [216 ] = ....... PNO. 7......... DYNAMIC COMP ....... STANDSTIL ......... REWIND.... PROP. GAIN [173 ] .... INT. GAIN[172 ]...... MO.HEALTH WORD [1150.101 ] = 1.280x0001 *[248 ] = 100.00 %... FLD. WEAK ENABLE [174 ] = ENABLED ... MENUS ..... FU........... EMF LEAD ..... MENU DELAY ..... EMF LAG ..... LANGUAGE[175 ] =[176 ] =2.0040.00INPUT C4... P..... EMF GAIN [177 ] = 0.30S MAIN PORT (P1) ..... D........... MIN FLD CURRENT [179 ] = 25.00 %*STINATION TAG [495 ]....... RATE [200 ] = ....... UNIT ID (UID) ..... STOP RATES 0 [4 ....... STOP TIME [27 ] = ....... STOPLIMIT [217 ] = FALSE....... CONTACTOR DELAY [302 ] = 60.0 SECS10.0 SECS [149 ] = EI ASCIITAG60.0 SECS51] = 9600.INVERTED 1.0 SECSABLED.DIGOUT 2 (B6)[97 ] = [359 ] =PROG STOP TIME [26 ] = 0.1 SECS 60.0 SECS......... FLD WEAK VARS...... PROG STOP I LIM [91 ] = 100.00 % ...... SYSTEM PORT (P3)........ STOP ZERO SPEED[29 ] = 0.70 % M ODE [130 ] = CELite (EIAS ....... CALIBRATION...... ARMATURE V CAL. [20 ] = 1.0000ORT ....... ARMATURE I (A9) [25 ] = BIPOLAR ........ BLOCK DIAGRAMSPDFBK ALM LEVEL [180 ] = 50.0 %..INT. TIME CONST. [13 ] =SOFTWARE DIG....... ANALOG TACH CAL [23 ] = ....... ZERO SPD. OFFSET [10] = ........... GROUP I1.0000= 0.00 % [134 ] = 0.00 %...DESTINATION TAG [13589STALL THRESHOLD[263 ] = 95.00 %STALL TRIP DELAY [224 ] = 10.0 SECS *....... O VER SPEED LEVEL [188 ] = 125.00 %0 0..... I NVERSE TIME O/P....... F IELD I CAL. [182 ] =1.0000xFFFF 0..... A T CURRENT LIMIT..... I NHIBIT ALARMS..... A NIN 3 (A4)....... A DDITIONAL DEM[30 ] = 0.00 % *..... A NIN 4 (A....... B IPOLAR CLAMPS [90 ] = DISABLED2 ] = 60*RCE TAG ....... R EGEN MODE [201 ] = ENABLEDNO 123 [323 ] = 207....... P OS. I CLAMP [301 ] =100.00 %OLTS....... P NO 124[324 ] =....... N EG. I CLAMP [48 ] = -100.00 %6 ] = 0[454I DMD. ISOLATE [119 ] = DISABLEDG [457 ] =SPEED LOOP [326 ] = ..PROP. GAIN[14 ] = 3.00 * ... PNO 127[327 ] =0.500 SECS ]ACTUAL NEG I....... PNO 125CONFIGURE..MAX DEMAND [357 ] =100.00 %*%3 ]AUTO R..EXTERNAL RESET [28 STANDSTILL...... SETPOINT SUM 1ODULUS [362 RATIO 1 [6 ] = 1.0000 [16... OFFSET[4RATIO 0[208 ] = 1.0000FFSOURCESIGN 1... DISC ADAPT [8 ] = POSITIVESIGN 0[292 ] = POSITIVE... % TO GET 10V [248 DIVIDER 1 [419 ] = 1.0000 DIVIDER 0 ... OFFSET[420 ] = 1.0000DEADBAND WIDTH [131 ] = 0.0 %2 ENABLELIMIT[375 ] = 105.00 %INT. DEFEAT [202 ] SPD BRK2 (HIGH) [270 ] = CALIBRATION [233 ] PROP.GAIN [271 ] = MAX VALUE [234 ] INT.TIME CONST. [272 ] = MIN VALUE I GAIN IN RAMP [274 ] = ANIN 3 (APOS. LOOP P GAIN [273 ] =ZERO SPD. QUENCH= FIGURE ENAB 5.00 % 5.000.500 SECS [390 ] = 0PUT1.000091 ] = 0 [63 ] = 0.00 % [236 ] = 1.0000-2.6 %MAX VALUE......... RATIO 2 (A3) [7 ] = 1.0000N VALUE [241 ] = -100.00 % ........... A ......... SETPOINT 2 (A3) [290 ] = ......... SETPOINT 3 [291 ] = ......... ANIN 5 (A6)NOT ALTER !! ......... SETPOINT 4 [41 ] =0.00 % DESTINATION TAG [250 ] = 379 0.00 % 0.00 %1.0000162 ] = 80......... MIN DEMAND [358 ] = -105.00 %160JOG/....... GROUP ID (GID) [138 ] = ........... VALUE FOR FAL ....... UNIT ID (UID) [139 ] = ........... DBAUD RATE [150 ] = 9600 DIGOUT 1 (B5)LINE SPE........ E SP SU.P(ASCII) [152 ] = DISABLED 0.00 %N [280 ] =1800......... M IN SP [142 ] = 0xFFFFLSE IP OFFSET [265 ] =OPTION ADDRESS [499 ] = 12 ... THRESHOLD (>)[196 ] =0.00 %RN OPTION VERSION [303 ] =14.00... INVERTED [361 ]ESP SU.P(ASCII) [153 ] = DISABLEDCONFIGURE 5703..TOT......... RAISE/LOWER DSYSTEM PORT (P3)] = 200.00 % ........ P3 SETUP ........ RA........ MODE [130 ]..UDP XFER <- P3367 ] = 0 ..UDP XFER -> P34) [52 ] = PNO CONFIG00 %07 ] = 32 0[386 ] =20..PROTOCOL SPECIAL[148 ] = OPTION[279 ] = 12200CHANGEBAND (BIN) [144 ] = 0.00 %[43 ] = TRUE TC [281 ] =....... E RROR REPORT [158 ] = 0x03C177SHOLD [282 ] =....... P NO. 7CHANGEBAND (BIN) [145 ] = 0.00 %= 89..... A CT ..... E RROR REPORT [159 ] = 0x00C0 ] = A412 ] = 0.00 %....... P NO. 7 [143 ] = 0xFFFF...TENSION ENABLE* = 3.00 VOLTS= -100.00 % *0 VOLTS= 0.2000 * 0 %........... S OURCE T ...... P NO 127[327 ] = 0TERMIN... SYSTEM TAG [470 ...... S OFTWARE...... C ONFIGURE I/O EMFCONFIGURE ENAB........... D ESTINATION TAG [246 ] =LINK 12 [4 ] = ENABLANIN 2 (A3)TAG [395 ] =..CALIBRATION[233 ] =1.0000R..DESTINATION TAG [396 ] =..MAX VALUE [234 ] = 100.00 %........... A DVANCED [397 ] = OFF ........... M IN VALUE [235 ] = -100.00 %..MODE SWITCH...RAMPING THR........... A NIN 3 (A4)6 %....... P NO 115[315 ] = 341......... L....... P NO 116 OFF.RATIO 2....... P NO 117 ..... D IVIDER 1 ..... D IGIN....... P NO 118 = OFF00[316 ] = [317 ] =[318 ] =342 344 *454 ] = 0INPUT C4 [69 ] =*E TAG [456 ] = 0 [72 ].PNO 112[312 ] =339 .... DE.PNO 113[313 ] = 340...LINK 4.PNO 114 [314 ] =309........... C ALIBRATION ..... R ESERV[236 ] = 1.0000..AUTO RESET[287 ] = ENABL........... D ESTINATION TAG [108 ] = 168 * ...... S PEED ERROR [29...... D IGITAL OUTPUTS ....... ........... D IGOUT 1 (B5)T DEMAND [299 ] = ........... T HRESHOLD (>) [195 ] = 0.00 %...... C URRENT FEEDBACK [298 ] = 0.00 % [33 ........... M ODULUS [43 ] = TRUEIGITAL DC DRIVE ........... S TANDBY ISSUE:......... ANOUT 1 (A7) 3.00 % * ........... % TO GET 10V [245 ] = 100.00 % JOG SPEED 2........... MODULUS ........... OFFSET [254........... SOURCETAG SPEED......... ANOUT 2 (A8)%[362 ] = FALSE *....... TAKE UP 1 [464 ] = 0.00 % [213 ] =[253 ] = 1 *KE UP 2[251 ] = 62.ZCD THRESHOLD [214 ] = 6RAWL........... % TO GET 10V [248 ] = 100.00 %[228 ] = FALSE........... M........... MODULUS ....... IMAX[363 ] = FALSE 2.0 SECS *........... OFFSET ....... RESET VALUE[465 ] = [25........... SOURCE TAG [252 ] =630INCREASE RATE [256 ] ....... DIGITAL INPUTS] = 155] = ......... DIGITAL INPUT C4 [257......... FIEL........... VALUE FOR TRUE [109 ] = ..MENU LEVEL ... DIAGNOSTICS100.01 %S *........... VALUE FOR FALSE[110 ] =0.00 %.00 % *[438 ] = 0.00 %SOURCE TAGSPEED DEMAND INVERTEDSPEED FEEDBACK [20PEEK SCALE [1........... MODULUS[44 ] = TRUE4AT ZERO SPEED [77 ] POS. I CLAMP [435 ] = NEG. I CLAMP [436 ] = TENS+COMP CALC. [478 ] =RA[97 ] =[[359 ] = FALSE77OSTICS1 ] = 0.00......... DIGOUT 2 (B6) [123 ] = [0x0078] ........... THRESHOLD (>) [196 ] =0.00 %.00 % ]= ENABLEDIELD FAIL [19 ] = ENA..... A ......... DIAMETER [431 ] = ..... INVER ......... TAPER [442 ] = ..... AT CURREN ......... SETPOINT SUM 2 [450 ] = ....... INTERNAL LINKS FALSE 0 [405 ] = 100.00 % 0IMIT [406 ] = -100.00 %0ALER(TRIM) [400 .... A T ZERO SETPOINT [78 ] = TRUE0LL [79 ] = TRUE ] = 0.00 % 0K.RATIO 1 [412 ] = 1.000......... LINK 1 [4 ..... PROGR ........... SOURCE TAG [364 ] = ......... DIVID ..... DRIVE START [82 ] ........... DESTINATION TAG [365 ] = ......... LINK 2 0.DRIVE ENABLE [84 ] = DISABLED1.0000......... STATI ..... ANIN 3 (A4) [ ......... LINK 5VOLTS ...... P OS. ........... SOURCE TAG [454 ] = ......... DESTINATION TAG [455 ] = ......... LINK 6 ...... FIX.INERT ........... SOURCE TAG [456 ] = ......... VAR.INERT ........... DESTINATION TAG S04 (A5) [53 ] =0.00 VOLTS .... 05 (A6) [54 ] = 10.01 VOLTS.50 %0TS 1.50 %0[484 ] = 0.00 % *0 [75 ] = ON 00 [417 ] = 0.00 % ........................ F LD CTRL MODE I 06 ] = FALSE0 00 [206 ] = 0 RPM .................................... DIVDESTINATION TARAMPSD WI[397 ] = OFF SECS [398 ] = SWITCH 10.0 SECS [399 ] = 0 ] = ENABLED * RESERVED.RAMP HOLD...... FACTORY USE ONLY[178 ] = 94.28 % DO NOT ALTER !! [5 ] = 0.00 % MIN MMI CYCLE12 BIT DAC [220 ] = DISABLED JOG SPEED 1 [218 ] = 5.00 %MMI FILTER T.C. [221 ] =........... P RED STEP [222 ] = 3KE UP 1 [253 ] = 5.00 % 14.00........... S CAN THRESHOLD [223 ] = 4P 2 [254 ] = -5.00 % [334 ] = EVE ........... F IELD FBKSTOP [34 ] = 155D [225 ] = 10.00 % ...... SRL LI........... DESTINATION TAG [461 ] = ..... DIGOU......... LINK 9] = ON ..... INE ........... SOURCE TAG [467 ] = ......... TEN........... DESTINATION TAG [468 ] = ..... RAISE/LOWER O/P ......... LINK 100 %SOURCE TAG [469 ] = DESTINATION TAG [470 ] = FLD VLINK 11 [415 ] = SOURCE TAG [390 ] = SPT SUM OUTPUT [86 ]AUX.SOURCE [394 ] = FLDWEAK..... TACH INPUT......... LINK 12 0.0 %. WEAK ENA ......... SOURCE TAG [395 ] =........... ADVANCED....... LIMIT ........... MODE ....... INPUT 2........... AUX.SOURCE ....... INPUT 1FIELD FFRSTOP [35 ] =209 [228 ] = FALSEURE V CAL. [20] = 1.0000 IFFB DELAYII [36 ] = 201.0 SECSENSATION[21 ] = 0.00 %141 ]... P LL PROP CHANGEBAN[276 ] = 80RAISE INP... P LL INT[277 ] =32ERRORLOWER INPUT [262 ]... F ILTER .TC. [386 ] = 20 MIN VALUE [258 ] = -100.00 % ........... ARM ENDSTOP [279 ] = 12200 ....................... MAX VALUE 95.0 [259 ] = 100.00 % ........... SCAN TC [283 ] = ........... HF C/O DISC GAIN [280 ] = ....... OVER SPE 10.EXTERNAL RESET [307 ] = FALSE = 1800RT 10.0 SE ..VALUE 1 [339 ]0.00 % ..VALUE 2 [340 ]0.00 % ..VALUE 3 [341 ]0.00 % ..VALUE 4 [342 ]0.00 % ..VALUE 5 [343 ]0.00 % ..VALUE 6 [344 ]0.00 % ..VALUE 7 [345 ]0.00 % ..VALUE 8 [379 ]0.00 % ..VALUE 9 [380 ]0.00 % ..VALUE 10 [381 ]0.00 % ..VALUE 11[382 ]0.00 %..VALUE 12..VALUE 13 [384 ]0.00 % ..VALUE 14 [385 ]0.00 %..LOGIC 1 [346 ] = OFF ..LOGIC 2 [347 ] = OFF..LOGIC 3 [348 ] = OFF..LOGIC 4 [349 ] = OFF..LOGIC 5 [350 ] = OFF..LOGIC 6 [351 ] = OFF..LOGIC 7[352 ] = OFF..LOGIC 8 [353 ] = OFF....... DIAMETER CALC..00 ..... miniLINK。
欧陆SSD590直流调速器中英文对照报警说明

0XF100错误产品代码
0XF100 HSO FUL错误
当调速器在本地控制下运行时,操作站已经从调速器上断开连接。当调速器在本地控制下运行时,操作站已经从调速器上断开连接。
22
AUTOTUNE ERROR
自动调整错误
自动调整序列期间报警才能运行
23
AUX PORW
电机短路
直流电机电枢线圈或励磁线圈短路,引起原因:下雨时直流电机进水引起或直流电机内部线圈破损碰线短路
9
3 PHASE FAILED
三相故障*
0x200
供电全面故障,或三相供电的相丢失(在大多数情况下是这样)—检查控制器的供电,检查高速晶闸管堆栈保护熔断器,检查电源底盘代码熔断器),检查调速器主电压(参阅产品代码)。如果电压不正确,即不正确的设备或控制器时,报警可能不能正确运行
10
PHASE LOCK
6
SPEED FEEDBACK
速度反馈
0x40
模拟测速器反馈极性不正确(端子G3 和G4),编码器符号参数极性不正确电线有连接,包括光纤,测速发电机故障,测速发电机耦合故障或电枢输出端保险熔断、测速电机到测速板之间的链接线断开或接地,报警延迟时间:0.4 秒
7
ENCODER FAILED
编码器故障
0x80
24
SEQ PRE READY
励磁接地
励磁线接地或励磁线圈接地或者主板有问题,引起原因:电缆线破损接触到机器外壳接地或者电缆在捆绑时勒伤或被导电物质刺破导致接地
25
CRITICAL ERROR
0xFF03
软件版本错误
14
Not used
校正插件板
0x4000
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SETPOINT SUM 2专用模块::设定值合计2
419
DIVIDER1
除数1
448
DIVIDER 0
除数0
420
DIVIDER2
除数2
466
DIVIDER 1
除数1
309
INPUT 0
输入0
444
INPUT 0
输入0
100
INPUT 1
输入1
443
INPUT 1
输入1
423
INPUT 2
比率2(A3)
289
SETPOINT 1
设定值1
290
SETPOINT 2 (A3)
设定值2
291
SETPOINT 3
设定值3
41
SETPOINT 4
设定值4
9
SIGN 2 (A3)
符号2(A3)
SPEED LOOP速度环
47
SPEED FBK SELECT
速度反馈选择
STANDSTILL静止
306
SOURCE TAG
源标记
11
STANDSTILL LOGIC
静止逻辑
12
ZERO THRESHOLD
零阀值
STOP RATES停机率
302
CONTACTOR DELAY
接触器延时
91
PROG STOP I LIM
程序停机电流限幅
216
PROG STOP LIMIT
程序停机极限
26
PROG STOP TIME
校准
39
CONFIGURE ENABLE
配置启动
234
MAX VALUE
最大值
配置输入输出::数字输入::DIGIN 1(C6)
235
MIN VALUE
最小值
102
DESTINATION TAG
目的标记
配置输入输出::模拟输入::ANIN 3(A4)
104
VALUE FOR FALSE
“虚”的值
236
95
AUX DIGOUT2
辅助数字量输出2
192
BEMF FBK LAG
反电动势反馈滞后
96
AUX DIGOUT 3
辅助数字量输出3
191
BEMF FBK LEAD
反电动势反馈超前
168
AUX ENABLE
辅助启动
177
EMF GAIN
电动势增益
227
AUX JOG
辅助微动
176
EMF LAG
电动势滞后
CALIBRATION
校准
103
VALUE FOR TRUE
“真”的值
249
DESTINATION TAG
目的标记
配置输入输出::数字输入::DIGIN 2(C7)
237
MAX VALUE
最大值
105
DESTINATION TAG
目的标记
238
MIN VALUE
最小值
107
VALUE FOR FALSE
PID专用模块::PID
257
DECREASE RATE
降低速率
401
DERIVATIVE TC
微分时间常数
307
EXTERNAL RESET
外部复位
418
DIVIDER 1
除数1
256
INCREASE RETE
增加速率
414
DIVIDER 2
除数2
262
LOWER INPUT
降低输入
408
ENABLE
复位值
434
OVER WIND
过卷
ADAPTION速度环::先进::自适应
272
INT.TIME CONST.
积分时间常数
268
MODE
方式
271
PROP. GAIN
比例增益
269
SPD BRK1(LOW)
速度断点1(低)
270
SPD BRK2(HIGH)
速度断点2(高)
ADVANCED速度环::先进
速率
301
POS. I CLAMP
正电流箝位
JOG/SLACK微动/慢速
16
PROP. GAIN
比例增益
225
CRAWL SPEED
爬行速度
201
REGEN MODE
再生方式
218
JOG SPEED 1
微动速度1
CURRENT PROFILE电流曲线
2பைடு நூலகம்9
JOG SPEED 2
微动速度2
93
IMAX BRK1(SPD1)
SETUP PARAMETERS设定参数
AUX I/O辅助输入/输出
FIELD CONTROL励磁控制
128
ANOUT1
模拟量输入1
170
FIELD ENABLE
励磁启动
129
ANOUT2
模拟量输入2
209
FLD CTRL MODE IS
励磁控制方式
94
AUX DIGOUT 1
辅助数字量输出1
励磁控制::励磁电流变量::励磁削弱变量
目的标记
CONFIGURE 5703配置输入输出::配置5703
231
MAX VALUE
最大值
135
DESTINATION TAG
目的标记
232
MIN VALUE
最小值
134
SOURCE TAG
源标记
配置输入输出::模拟输入::ANIN 2(A3)
CONFIGURE I/O配置输入输出
233
CALIBRATION
“虚”的值
配置输入输出::模拟输入::ANIN 4(A5)
106
VALUE FOR TRUE
“真”的值
239
CALIBRATION
校准
配置输入输出::数字输入::DIGIN 3(C8)
250
DESTINATION TAG
目的标记
108
DESTINATION TAG
目的标记
240
MAX VALUE
最大值
启动
259
MAX VALUE
最大值
403
FILTER T.C.
滤波器时间常数
258
MIN VALUE
最小值
410
INPUT 1
输入1
261
RAISE INPUT
增加输入
411
INPUT 2
输入2
255
RESET VALUE
复位值
409
INT. DEFEAT
积分失效
RAMPS斜坡
402
INT. TIME CONST
DIAMETER CALC.专用模块::直径校准
438
TAPER
锥度
427
DIAMETER
直径
452
TAPER DEMAND
锥度要求
463
EXTERNAL RESET
外部复位
439
TENSION SPT.
张力设定值
424
LINE SPEED
线速度
440
TENSION TRIM
张力修整
425
MIN DIAMETER
最小直径
441
TOT.TENS DEMAND
总张力要求
426
MIN SPEED
最小速度
TORQUE CALC.专用模块::转矩计算
453
RAMP RATE
斜坡速率
433
TENSION ENABLE
张力启动
437
REEL SPEED
卷筒速度
432
TORQUE DEMAND
转矩要求
462
RESET VALUE
积分时间常数
266
% S-RAMP
S斜坡百分数
474
MIN PROFILE GAIN
最小曲线增益
287
AUTO RESET
自动复位
473
MODE
方式
4
CONSTANT ACCEL
恒加速
406
NEGATIVE LIMIT
负极限
288
EXTERNAL RESET
外部复位
407
O/P SCALER(TRIM)
正极限
5
RAMP INPUT
斜坡输入
475
PROFILE GAIN
曲线增益
286
RAMPING THRESH.
斜坡阀值
404
PROP. GAIN
比例增益
422
RESET VALUE
复位值
412
RATIO 1
比率1
SETPOINT SUM 1设定值合计1
413
RATIO 2
比率2
131
DEADBAND WIDTH
110
VALUE FOR FALSE
“虚”的值
241
MIN VALUE
最小值
109
VALUE FOR TRUE
“真”的值
配置输入输出::模拟输入::ANIN 5(A6)
配置输入输出::数字输出::DIGOUT 1(B5)
242
CALIBRATION
校准
359
INVERTED
“非”
247
DESTINATION TAG