第六章 粒子群算法(更新)
粒子群算法
粒子群算法1.粒子群算法简介1.1集群智能(Swarm Intelligence)Swarm可被描述为一些相互作用相邻的个体的集合体,蜂群、蚁群、鸟群都是Swarm 的典型例子。
鱼聚集成群可以有效地逃避捕食者,因为任何一只鱼发现异常都可以带动整个鱼群逃避。
蚂蚁成群则有利于寻找食物,因为任何一只蚂蚁发现食物都可以带领蚁群来共同搬运和进食。
一只蜜蜂或蚂蚁的能力非常有限,它几乎不可能独立存在于自然世界中,而多个蜜蜂或蚂蚁形成的Swarm则具有非常强的生存能力,且这种能力不是通过多个个体之间的能力简单叠加所获得的。
社会性动物群体所拥有的这种特性能够帮助个体很好的适应环境,个体所能获得的信息远比它通过自身感觉器官所取得的多,其根本原因在于个体之间存在着信息交互能力。
信息交互过程不仅仅在群体中传播信息,而且群内个体还能处理信息,并根据所获得的信息改变自身的一些行为模式和规范,这就使得群体涌现出一些单个个体不具备的能力和特性,尤其是对环境的适应能力。
这种对环境变化所具有适应的能力可以被认为是一种智能,称为集群智能(Swarm Intelligence)。
集群智能具有如下几个特点:1)群内个体具有执行简单的时间或空间上的评估和计算的能力。
2)群内个体能对环境(包括群内其他个体)的关键性因素的变化做出响应。
3)群内不同个体对环境中某一变化所表现出的响应行为具有多样性。
4)不是每次环境的变化都会导致整个群体的行为模式发生改变。
5)环境所发生的变化中,若出现群体值得付出代价的改变机遇,群体必须能够改变其行为模式。
1.2 粒子群算法介绍粒子群算法,也称粒子群优化算法(Particle Swarm Optimization),缩写为PSO,是根据集群智能Swarm Intelligence思想发展而来的一种算法,最早由Kennedy和Eberhart提出,该算法模拟了鸟群飞行觅食的行为,鸟之间通过集体的协作使群体达到最优目的。
粒子群算法
设想这样一个场景〆一群鸟在随机的搜索食物。 在这个区域里只有一块食物,所有的鸟都不知 道食物在那。但是它们知道自己当前的位置距 离食物还有多远。 那么找到食物的最优策略是什么〇 最简单有效的就是搜寻目前离食物最近的鸟的 周围区域。
算法介绍
抽象〆
鸟被抽象为没有质量和体积的微粒(点), 并延伸到N维空间,粒子I 在N维空间的位置表 示为矢量Xi=(x1,x2,„,xN),飞行速度表 示为矢量Vi=(v1,v2,„,vN)〃 每个粒子都有一个由目标函数决定的适 应值(fitness value),并且知道自己到目前 为止发现的最好位置(pbest)和现在的位置Xi.
这个可以看作是粒子自己的飞行经验〃除此之 外,每个粒子还知道到目前为止整个群体中所有粒子 发现的最好位置(gbest)(gbest是pbest中的最好 值)〃这个可以看作是粒子同伴的经验〃粒子就是通过 自己的经验和同伴中最好的经验来决定下一步的运动。
PSO初始化为一群随机粒子(随机解)。然后通过 迭代找到最优解。在每一次的迭代中,粒子通过 跟踪两个“极值”(pbest,gbest)来更新自己。 在找到这两个最优值后,粒子通过下面的公式来 更新自己的速度和位置。
目前,采用较多的是shi建议的线性递减权值 (linearly decreasing weight, LDW)策略。
(t )
(ini end )(Gk g ) / Gk end
Gk为最大进化代数, ini为初始惯性权值, end为迭代至最大代数时惯性权值。 典型取值 ini=0.9, end=0.4。
当C2=0时,则粒子之间没有社会信息,模型变为 只有认知(cognition-only)模型〆
Vi Vi c1 rand () ( pbest xi )
数学建模——粒子群算法(PSO)
数学建模——粒子群算法(PSO)粒子群算法(Particle Swarm Optimization,PSO)是一种群体智能优化算法,通过模拟粒子在空间中的跳跃和信息共享来寻找最优解。
PSO 算法源自于对鸟群觅食行为的模拟,通过定义粒子的位置和速度,粒子通过互相通信和协同学习,逐步优化空间中的解。
PSO算法的基本思想是通过模拟粒子群在解空间中的运动来寻找最优解。
每个粒子都有自己的位置和速度,并且根据自己的经验和群体的经验来调整自己的位置和速度。
粒子的位置表示解空间中的一个解,速度表示在解空间中的移动方向和速度。
算法通过迭代更新粒子的位置和速度,使粒子群逐步从解空间的各个位置向最优解靠近。
PSO算法的具体步骤如下:1.初始化粒子群:设定粒子的初始位置和速度,并为每个粒子随机分配解空间中的一个初始解。
2.计算适应度值:根据目标函数计算每个粒子的适应度值。
3.更新个体最优解:对于每个粒子,根据自身的最优解和当前的最优解来更新自己的个体最优解。
4.更新群体最优解:对于每个粒子,根据全局最优解来更新粒子群的最优解。
5.更新粒子速度和位置:根据个体最优解和群体最优解来更新每个粒子的速度和位置。
6.判断终止条件:判断是否满足停止迭代的条件,如果满足则输出当前的最优解,否则返回第3步。
7.输出最优解:输出最优解。
PSO算法有一些特点和优势:1.简单易实现:PSO算法的实现非常简单,不需要复杂的数学推导和计算。
2.并行计算:PSO算法的每个粒子可以独立地计算自己的位置和速度,可以有效地使用并行计算的优势。
3.对局部最优解有一定的克服能力:通过信息共享和协同学习,PSO算法可以避免陷入局部最优解,并能逐步逼近全局最优解。
4.适用于连续空间和离散空间:PSO算法不仅适用于连续优化问题,也适用于离散优化问题。
然而,PSO算法也存在一些缺点:1.对参数敏感:PSO算法的性能很大程度上依赖于参数的调整,不同的问题可能需要调整不同的参数。
粒子群算法——精选推荐
粒⼦群算法(1)群智能群智能:任何⼀种受昆⾍群体或其它动物社会⾏为机制启发⽽设计出的算法或分布式解决问题的策略均属于群智能范畴。
根据这个定义,最早的蚁群算法、蜂群算法、粒⼦群算法和鱼群算法等也应归属于此类。
群智能是⾃然界中物种进化数亿年的结果,通过群体的信息共享和学习机制,实现了对变化的⾃然环境的适应。
这是⼀种近乎完美的适应⽅式,它不仅仅是单个个体智能的简单相加,⽽是通过信息共享机制和学习竞争所实现的⽣存能⼒的最⼤化。
也可以说是⾃然界寻优过程中的⼀个局部最优点,或者说是到⽬前为⽌的全局最优点。
(2)粒⼦群算法的由来粒⼦群算法是基于群体智能的全局优化算法,具有内在的并⾏搜索机制,特别适⽤于传统⽅法难以奏效的复杂优化领域。
粒⼦群优化算法是基于群体的演化算法, 其思想来源于⼈⼯⽣命和演化计算理论。
对鸟群飞⾏的研究发现,鸟只需追踪它周边有限数量的邻居,但最终的结果是整个鸟群好像在⼀个⽆形的中⼼控制之下有序飞⾏。
换句话说,复杂⽽优雅的全局⾏为是由最简单规则的相互作⽤⽽产⽣,这即是群智能的实质意义。
PSO即源于对鸟群捕⾷⾏为的研究:⼀群鸟在随机搜寻⾷物, 如果这个区域⾥只有⼀块⾷物, 那么找到⾷物的最简单有效的策略就是搜寻当前最靠近⾷物的鸟的周围区域。
PSO算法就是从这种模式中得到启发⽽产⽣的,并进⼀步⽤于求解优化问题。
次外,⼈们通常是以⾃⾝及他⼈的经验作为决策的依据,这也合符PSO 的基本想法:PSO在求解优化问题时,问题的解对应于搜索空间中⼀只鸟(粒⼦,Particle)的位置。
粒⼦不仅有各⾃的位置和速度,还有⼀个由⽬标函数决定的适应值。
每个粒⼦记忆、追随当前的最优粒⼦,对解空间进⾏搜索:每次搜索(迭代)都含有⼀些随机因素但并⾮完全随机, 若找到更好解,将以此为基础来寻找下⼀个好解。
(3)算法部分1)算法解释PSO学习模式=惯量学习(Momentum)+⾃⾝经验(Self-Knowledge)+社会知识(Social Knowledge)该算法初始化为⼀群随机粒⼦(随机解),然后通过迭代找到最优解,在每⼀次迭代中,粒⼦通过两个“极值”来更新⾃⼰。
粒子群算法
粒子群算法原理及简单案例[ python ]介绍粒子群算法(Particle swarm optimization,PSO)是模拟群体智能所建立起来的一种优化算法,主要用于解决最优化问题(optimization problems)。
1995年由 Eberhart和Kennedy 提出,是基于对鸟群觅食行为的研究和模拟而来的。
假设一群鸟在觅食,在觅食范围内,只在一个地方有食物,所有鸟儿都看不到食物(即不知道食物的具体位置。
当然不知道了,知道了就不用觅食了),但是能闻到食物的味道(即能知道食物距离自己是远是近。
鸟的嗅觉是很灵敏的)。
假设鸟与鸟之间能共享信息(即互相知道每个鸟离食物多远。
这个是人工假定,实际上鸟们肯定不会也不愿意),那么最好的策略就是结合自己离食物最近的位置和鸟群中其他鸟距离食物最近的位置这2个因素综合考虑找到最好的搜索位置。
粒子群算法与《遗传算法》等进化算法有很多相似之处。
也需要初始化种群,计算适应度值,通过进化进行迭代等。
但是与遗传算法不同,它没有交叉,变异等进化操作。
与遗传算法比较,PSO的优势在于很容易编码,需要调整的参数也很少。
一、基本概念与遗传算法类似,PSO也有几个核心概念。
粒子(particle):一只鸟。
类似于遗传算法中的个体。
1.种群(population):一群鸟。
类似于遗传算法中的种群。
2.位置(position):一个粒子(鸟)当前所在的位置。
3.经验(best):一个粒子(鸟)自身曾经离食物最近的位置。
4.速度(velocity ):一个粒子(鸟)飞行的速度。
5.适应度(fitness):一个粒子(鸟)距离食物的远近。
与遗传算法中的适应度类似。
二、粒子群算法的过程可以看出,粒子群算法的过程比遗传算法还要简单。
1)根据问题需要,随机生成粒子,粒子的数量可自行控制。
2)将粒子组成一个种群。
这前2个过程一般合并在一起。
3)计算粒子适应度值。
4)更新种群中每个粒子的位置和速度。
粒子群算法
智能优化计算
1 粒子群算法的基本原理
1.1 粒子群算法的提出 ➢ 五年后,在国际上逐步被接受,并有大批不同 领域的学者投入该算法相关研究,目前已经成 为智能优化领域研究的热门
➢ 2003年,《控制与决策》第二期刊登国内第一篇 PSO论文——综述文章
8
历年发表论文的数目
2500
2328
2000
1500
xikd
)
c2 ra n d( ) ( p gbest
xikd )
xk 1 id
xikd
vk 1 id
i 1,2,, m; d 1,2,, D
惯性权重(续)
通过调节w值,可以控制PSO的全局探索和局部开发能力:
• w≥1:微粒速度随迭代次数的增加而增加,微粒发散。
• 0<w<1 :微粒减速,算法的收敛性依靠惯性权重c1和 c2 。
共性
(1)都属于仿生算法; (2)都属于全局优化方法; (3)都属于随机搜索算法; (4)都隐含并行性; (5)根据个体的适配信息进行搜索,因此不受函 数约束条件的限制,如连续性、可导性等; (6)对高维复杂问题,往往会遇到早熟收敛和收 敛性能差的缺点,都无法保证收敛到最优点。
PSO就是对鸟群或鱼群寻找食物这种群体行为的模拟。
单个鸟 整个鸟群
单个微粒
由多个微粒组 成的微粒群
一个微粒代表问题 的一个解
每个微粒都有一个 由被优化函数值决 定的适应值
鸟群寻找食 物的飞行策 略
鸟群行为
微粒位置和速 度的更新策略
PSO
13
每个微粒通过跟踪 自身找到的最好位 置以及邻域内其它 微粒找到的最好位 置,完成对整个搜 索空间的搜索
最大化问题
粒子群算法(基础精讲)课件

神经网络训练
神经网络训练是指通过训练神经网络来使其能够学习和模拟特定的输入输出关系 。粒子群算法可以应用于神经网络的训练过程中,通过优化神经网络的参数来提 高其性能。
例如,在机器视觉、语音识别、自然语言处理等领域中,神经网络被广泛应用于 各种任务。粒子群算法可以用于优化神经网络的结构和参数,从而提高其分类、 预测等任务的准确性。
优势
在许多优化问题中,粒子群算法表现出了良好的全局搜索能 力和鲁棒性,尤其在处理非线性、多峰值等复杂问题时具有 显著优势。
粒子群算法的核心要素
02
粒子个体
01
粒子
在粒子群算法中,每个解被称为一个粒子,代表问题的 一个潜在解。
02
粒子状态
每个粒子的位置和速度决定了其状态,其中位置表示解 的优劣,速度表示粒子改变方向的快慢。
社会认知策略的引入
总结词
引入社会认知策略可以增强粒子的社会性,提高算法的群体协作能力。
详细描述
社会认知策略是一种模拟群体行为的方法,通过引入社会认知策略,可以增强粒子的社会性,提高算 法的群体协作能力。在粒子群算法中引入社会认知策略,可以使粒子更加关注群体最优解,促进粒子 之间的信息交流和协作,从而提高算法的全局搜索能力和鲁棒性。
03 粒子群算法的实现步骤
初始化粒子群
随机初始化粒子群的 位置和速度。
初始化粒子的个体最 佳位置为随机位置, 全局最佳位置为随机 位置。
设置粒子的个体最佳 位置和全局最佳位置 。
更新粒子速度和位置
根据粒子个体和全局最佳位置计 算粒子的速度和位置更新公式。
更新粒子的速度和位置,使其向 全局最佳位置靠近。
每个粒子都有一个记录其历史最 佳位置的变量,用于指导粒子向
粒子群算法【精品文档】(完整版)
粒子群算法摘要:粒子群优化算法是由James Kennedy和 Russell Eberbart 设计的一种仿生优化计算方法。
PSO算法的基本设计思想来源于两个方面分别是人工生命和进化计算,设计者通过研究动物群体以及人类行为模式的计算机模拟,然后不断的试错、修改而逐渐的到算法的原型。
PSO算法的运行机理不是依靠个体的自然进化规律,而是对生物群体的社会行为进行模拟。
它最早源于对鸟群觅食行为的研究。
在生物群体中存在着个体与个体、个体与群体间的相互作用、相互影响的行为,这种相互作用和影响是通过信息共享机制体现的。
PSO算法就是对这种社会行为的模拟即利用信息共享机制,使得个体间可以相互借鉴经验,从而促进整个群体朝着更好的方向发展。
关键词:粒子群优化算法;社会行为;鸟群觅食;信息共享1 粒子群算法设计思想粒子群算法的思想来源于对鸟捕食行为的模仿,虽让鸟群在捕食过程中会发生改变飞行方向、聚集等一系列不可预测的行为但整体还是呈现一种有序性,研究证明是因为鸟群中存在一种信息共享机制。
可以设想一群鸟在随机搜索食物,刚开始每只鸟均不知道食物在哪里,所以均无特定的目标进行飞行,但是它们知道哪只鸟距离食物最近,还有自己曾经离食物最近的位置,每只鸟开始通过试图通过这两个位置来确定自己往哪个方向飞行。
因此可以将鸟群觅食行为看做一个特定问题寻找解的过程。
如果我们把一个优化问题看做是空中觅食的鸟群,那么粒子群中每个优化问题的可行解就是搜索空间中的一只鸟,称为“粒子”,“食物”就是优化问题的最优解。
个体找到食物就相当于优化问题找到最优解。
当然这里的鸟群(粒子)是经过人工处理的,它们均有记忆功能,没有质量和体积,不占空间,每个粒子均有速度和位置两个属性,同时每个粒子都有一个由优化问题决定的适应度来评价粒子的“好坏”程度,显然,每个粒子的行为就是总追随者当前的最优粒子在解空间中搜索。
2 粒子群优化算法2.1 标准粒子群优化算法首先提出两个概念,(1)探索:是值粒子在一定程度上离开原先的搜索轨迹,向新的方向进行搜索,体现了向未知区域开拓的能力,可以理解为全局搜索。
粒子群优化算法基本原理
粒子群优化算法基本原理粒子群优化算法(Particle Swarm Optimization,简称PSO)是一种基于仿生学思想的优化算法,最早由美国加州大学洛杉矶分校(University of California, Los Angeles)的Eberhart和Kennedy于1995年提出。
该算法模拟了群体中个体之间的协作行为,通过不断的信息交流与迭代搜索,寻找最优解。
粒子群优化算法的基本思想是通过模拟鸟群或鱼群等生物群体在搜索空间中的行为,通过个体间的合作与信息共享来寻找最优解。
算法的核心是通过不断更新每个粒子的速度和位置,使其朝着全局最优解的方向进行搜索。
在粒子群优化算法中,每个粒子代表一个解决方案,并通过在搜索空间中移动来寻找最优解。
每个粒子都有一个位置向量和一个速度向量,位置向量表示当前粒子所在的位置,速度向量表示粒子在搜索空间中的移动方向和速度。
每个粒子还有两个重要的参数:个体最佳位置(Pbest)和全局最佳位置(Gbest)。
个体最佳位置表示粒子自身经历的最优位置,全局最佳位置表示整个粒子群中最优的位置。
算法的具体过程如下:1. 初始化粒子群的位置和速度,并为每个粒子设置初始的个体最佳位置。
2. 根据当前位置和速度更新粒子的位置和速度,并计算粒子的适应度值。
3. 更新粒子的个体最佳位置和全局最佳位置。
如果当前适应度值优于个体最佳适应度值,则更新个体最佳位置;如果当前适应度值优于全局最佳适应度值,则更新全局最佳位置。
4. 判断终止条件,如果满足停止条件,则输出全局最佳位置作为最优解;否则返回步骤2进行下一轮迭代。
5. 结束。
粒子群优化算法的优点在于简单易实现,不需要求导等额外计算,且具有全局搜索能力。
由于模拟了群体协作的行为,粒子群优化算法可以克服遗传算法等局部搜索算法容易陷入局部最优解的问题。
此外,算法的收敛速度较快,迭代次数相对较少。
然而,粒子群优化算法也存在一些缺点。
首先,算法对于问题的解空间分布较为敏感,如果解空间分布较为复杂或存在多个局部最优解,算法可能无法找到全局最优解。
粒子群算法粒子群算法简介
粒子群算法(1)----粒子群算法简介二、粒子群算法的具体表述上面罗嗦了半天,那些都是科研工作者写论文的语气,不过,PSO的历史就像上面说的那样。
下面通俗的解释PSO算法。
PSO算法就是模拟一群鸟寻找食物的过程,每个鸟就是PSO中的粒子,也就是我们需要求解问题的可能解,这些鸟在寻找食物的过程中,不停改变自己在空中飞行的位置与速度。
大家也可以观察一下,鸟群在寻找食物的过程中,开始鸟群比较分散,逐渐这些鸟就会聚成一群,这个群忽高忽低、忽左忽右,直到最后找到食物。
这个过程我们转化为一个数学问题。
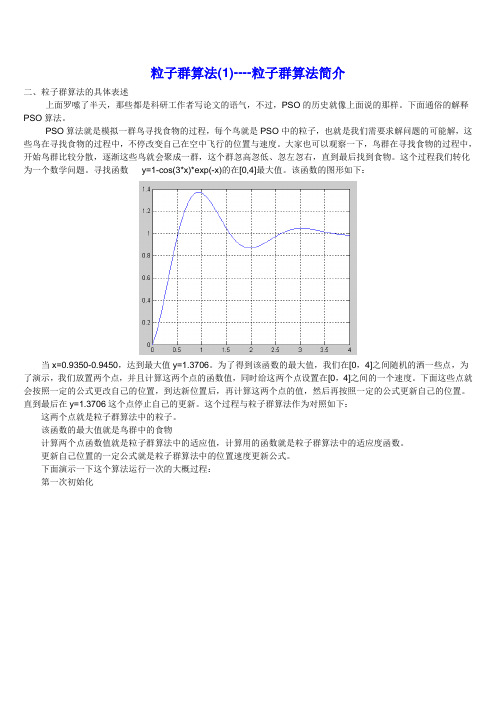
寻找函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。
该函数的图形如下:当x=0.9350-0.9450,达到最大值y=1.3706。
为了得到该函数的最大值,我们在[0,4]之间随机的洒一些点,为了演示,我们放置两个点,并且计算这两个点的函数值,同时给这两个点设置在[0,4]之间的一个速度。
下面这些点就会按照一定的公式更改自己的位置,到达新位置后,再计算这两个点的值,然后再按照一定的公式更新自己的位置。
直到最后在y=1.3706这个点停止自己的更新。
这个过程与粒子群算法作为对照如下:这两个点就是粒子群算法中的粒子。
该函数的最大值就是鸟群中的食物计算两个点函数值就是粒子群算法中的适应值,计算用的函数就是粒子群算法中的适应度函数。
更新自己位置的一定公式就是粒子群算法中的位置速度更新公式。
下面演示一下这个算法运行一次的大概过程:第一次初始化第一次更新位置第二次更新位置第21次更新最后的结果(30次迭代)最后所有的点都集中在最大值的地方。
粒子群算法(2)----标准的粒子群算法在上一节的叙述中,唯一没有给大家介绍的就是函数的这些随机的点(粒子)是如何运动的,只是说按照一定的公式更新。
这个公式就是粒子群算法中的位置速度更新公式。
下面就介绍这个公式是什么。
在上一节中我们求取函数y=1-cos(3*x)*exp(-x)的在[0,4]最大值。
粒子群算法基本流程
粒子群算法基本流程粒子群算法(Particle Swarm Optimization, PSO)是一种基于自然界群体智能现象的优化算法,常用于解决各种优化问题,如函数优化、组合优化、机器学习等。
本文将详细介绍粒子群算法的基本流程,包括初始化、适应度评价、移动、更新等环节,希望能对读者理解该算法提供一定的帮助。
一、算法介绍粒子群算法最初由Kennedy和Eberhart于1995年提出 [1],其基本思想来源于鸟群觅食行为。
在野外觅食时,鸟群中的鸟会根据所找到的食物数量来确定自己下一步的移动方向。
PSO算法中的“粒子”类似于鸟群中的鸟,它们以个体和群体为导向,通过速度和位置的调整来进行优化搜索。
PSO算法的目标是寻找最优解,通常是最小化或最大化一个函数的值,可表示为:f(x)=\sum_{i=1}^n{f_i(x)}x 是 n 维实数向量,f_i(x) 表示第 i 个函数。
寻找最优解的目标就是在 x 的搜索空间中寻找函数 f(x) 的全局最优解或局部最优解。
二、基本流程粒子群算法的基本流程如下:1. 初始化:随机生成一群粒子,每个粒子的位置和速度都是随机的。
2. 适应度评价:计算每个粒子的适应度值,也就是函数 f(x) 所对应的值,用来表示该粒子所处的位置的优劣程度。
3. 移动:根据当前位置和速度,移动粒子到新的位置。
4. 更新:根据历史上最好的粒子位置和当前最好的粒子位置,更新每个粒子的历史最好位置和当前最好位置,并更新全局最优位置。
5. 终止:当满足一定的终止条件时,停止迭代,并输出最终的粒子位置和最优解。
下文将分别对各环节进行详细介绍。
三、初始化在PSO算法中,粒子的位置和速度都是随机的。
对于每个粒子,需要随机生成一个 n 维实数向量表示其位置,一个同维度的实数向量表示其速度。
可以采用如下方法进行初始化:1. 对于每一个维度,随机生成一个实数范围内的数值,表示该维度上的位置和速度。
2. 在满足约束条件的前提下,生成一个可行解,作为初始化的位置。
第六章群智能算法
第六章群智能算法群智能算法(Swarm Intelligence,SI)是一种受自然界生物群体行为启发的计算模型和算法。
它模拟了蚂蚁、鸟群、鱼群等群体行为,通过群体中个体之间的相互作用和信息共享来解决复杂的优化问题。
群智能算法的核心思想是通过模拟群体中个体的信息交流和协作来找到最优解。
这种群体智能的优势在于它能够在没有集中控制或全局信息的情况下,通过简单的局部规则来产生复杂的群体行为。
这种分布式、自组织的方式非常适合解决大规模和高维的优化问题。
最典型的群智能算法包括蚁群算法、粒子群优化算法和鱼群算法。
蚁群算法(Ant Colony Optimization,ACO)模拟了蚂蚁在食物过程中的行为,通过蚂蚁之间的信息沟通和信息素释放来寻找最短路径。
粒子群优化算法(Particle Swarm Optimization,PSO)模拟了鸟群或鱼群中个体的协作和信息共享,通过更新个体的位置和速度来最优解。
鱼群算法(Fish School Search,FSS)则模拟了鱼群中个体的觅食行为,通过觅食和逃避行为来寻找最优解。
群智能算法与传统的优化算法相比具有以下优势。
首先,群智能算法具有高度的并行性和分布性。
每个个体都可以独立地进行计算和,不同个体之间的信息交流和协作能够大大提高算法的效率。
其次,群智能算法具有自适应性和鲁棒性。
群体中的个体可以根据环境变化和任务需求进行自主调整和适应,从而能够应对复杂的问题和多样化的场景。
此外,群智能算法还具有较好的全局能力和局部优化能力。
通过个体之间的信息共享和协作,算法能够在全局范围内最优解,并通过局部策略进行优化。
然而,群智能算法也存在一些挑战和限制。
首先,算法参数的选择和调整比较困难。
不同问题和场景下,参数设置可能需要调整,否则算法的性能会受到影响。
其次,算法的收敛性和鲁棒性可能存在问题。
由于算法本身的随机性和分布式性质,算法的结果可能会受到初值和初始条件的影响,从而导致结果的不稳定性。
粒子群算法
粒子群算法(PSO)
算法在迭代30次后跳出循环,输出最优解为[0.0202,0.0426],此时目标函数值为 因为我们选用的例子为二次型规划,显然最优解为[0,0],最优值为0。 最后,我们用一个三维动画来展示一下粒子群算法的寻优过程。
粒子群算法(PSO)
一、粒子群算法的概述 粒子群算法(PSO)属于群智能算法的一种,是通过模拟鸟群捕食行为设计的。假设区域里就只有一块 食物(即通常优化问题中所讲的最优解),鸟群的任务是找到这个食物源。鸟群在整个搜寻的过程中,通 过相互传递各自的信息,让其他的鸟知道自己的位置,通过这样的协作,来判断自己找到的是不是最优解, 同时也将最优解的信息传递给整个鸟群,最终,整个鸟群都能聚集在食物源周围,即我们所说的找到了最 优解,即问题收敛。
粒子群算法(PSO)
粒子群算法(PSO)
粒子群算法(PSO)
粒子群算法(PSO)
粒子群优化算法(Particle Swarm Optimization,简称PSO), 由1995年Eberhart博士和Kennedy 博士共同提出,它源于对鸟群捕食行为的研究。粒子群优化算法的基本核心是利用群体中的个体对信息的 共享,从而使得整个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得问题的最优解。 假设自己是一只身处鸟群中的鸟,现在要跟随头领去森林里找食物,我们每一只鸟都知道自己离食物的距 离,却又不知道食物在哪个方向。 所以,我们在森林里漫无目地的飞啊飞,每隔一段时间,大家会在微信群里共享一次各自与食物的距离。 然后鸟A发现自己与食物的距离是5公里,而群里鸟Z距离食物最近,只有50米的距离。 鸟A当机立断,在群里说:“我要去那看看!”然后一呼百应,鸟B、鸟C等都往鸟Z方向飞去,在鸟Z的周 围寻找食物。 就这样,本来大家都在沿着自己的方向飞,现在都要向鸟Z的位置靠拢,所以大家需要修改自己的飞行速 度和方向。 但是,当所有鸟儿准备调整自己的飞行轨迹时,鸟H突然想到:虽然现在鸟Z离食物只有50米,但是自己 曾经路过点P,那个位置离食物只有40米,所以它不知道自己是应该往点P方向还是往鸟Z的位置飞去。 鸟H就把自己的纠结发到了微信群里,然后大家一致决定,还是两者平衡一下,对两个位置进行矢量相加, 所以大家共同商量出了速度更新公式粒子群算法源自PSO)粒子群算法(PSO)
粒子群算法
粒子群算法粒子群算法(Particle Swarm Optimization,PSO)是一种群体智能优化算法,它模拟了鸟群觅食行为中个体在信息交流、合作与竞争中寻找最优解的过程。
粒子群算法在解决优化问题中具有较好的效果,尤其适用于连续优化问题。
粒子群算法的基本思想是模拟粒子在解空间中的移动过程,每个粒子代表一个候选解,粒子的位置表示解的一组参数。
每个粒子都有一个速度向量,表示粒子在解空间中的移动方向和速率。
算法的核心是通过更新粒子的位置和速度来搜索目标函数的最优解。
具体来说,粒子的位置和速度更新通过以下公式计算:$$v_i^{t+1} = w\cdot v_i^{t} + c_1 \cdot rand() \cdot (p_i^{best}-x_i^{t}) + c_2 \cdot rand() \cdot (p_g^{best}-x_i^{t})$$$$x_i^{t+1} = x_i^{t} + v_i^{t+1}$$其中,$v_i^{t}$是粒子$i$在时间$t$的速度,$x_i^{t}$是粒子$i$在时间$t$的位置,$p_i^{best}$是粒子$i$自身经历过的最好位置,$p_g^{best}$是整个种群中经历过的最好位置,$w$是惯性权重,$c_1$和$c_2$是加速度因子,$rand()$是一个0到1的随机数。
粒子群算法的优点在于简单、易于理解和实现,同时具有较好的全局搜索能力。
其收敛速度较快,可以处理多维、非线性和非光滑的优化问题。
另外,粒子群算法有较少的参数需要调节,因此适用于许多实际应用中的优化问题。
粒子群算法的应用领域非常广泛,包括机器学习、数据挖掘、图像处理、模式识别、人工智能等。
例如,在机器学习中,粒子群算法可以应用于神经网络的训练和参数优化;在数据挖掘中,粒子群算法可以用于聚类、分类和关联规则挖掘等任务;在图像处理中,粒子群算法可以用于图像分割、边缘检测和特征提取等;在模式识别中,粒子群算法可以用于目标检测和模式匹配等。
第6章粒子群算法基本理论
PSO算法作为一种新兴智能仿生算法,目前还没有完备 的数学理论基础,但作为新兴优化算法已在诸多领域得到广 泛应用。
6.1 粒子群算法的概述
6.1.3 粒子群算法的特点
粒子群算法的优点 ① 粒子群算法依靠粒子速度完成搜索,在迭代进化中只 有最优的粒子将信息传递给其他粒子,搜索速度快。 ② 粒子群算法具有记忆性,粒子群体的历史最好位置可 以记忆,并传递给其他粒子。 ③ 需调整的参数较少,结构简单,易于工程实现。 ④ 采用实数编码,直接由问题的解决定,问题解的变量 数直接作为粒子的维数。
[2] Eberhart R,Kennedy J,A new optimizer using particle swarm theory,Proceeding of the 6th International Symposium on Micro-Machine and Human Science, 1995,39~43
粒子群算法的基本思想是通过群体中个体之间的协作和 信息共享来寻找最优解。
6.1 粒子群算法的概述
6.1.2 粒子群算法的发展
萌芽阶段
1986年,人工生命、计算机图形 学专家 Craig Reynolds提出了简单的 人工生命系统——boid模型(解释为 bird like object),模拟了鸟类在飞行 过程中分离、列队和聚集三种聚群飞 行行为,并能感知到周围一定范围内 其他boid的飞行信息。boid根据该信 息,结合当前自身的飞行状态,在三 条简单行为规则的指导下,做出下一 步的飞行决策。
Step2:评价每个微粒的适应度值。 Step3:将每个微粒的适应度值与其经过的最好位置 pbest进行比较,如果较好则将其作为当前的最好位置pbest。 Step4:将每个微粒的适应度值与种群的最好位置gbest 进行比较,如果较好则将其作为种群的最好位置gbest。 Step5:根据速度和位置公式调整粒子的飞行速度和所 处位置。 Step6:判断是否达到结束条件,若未达到转到Step2。
粒子群算法求解最小值
粒子群算法求解最小值粒子群算法(PSO)是一种基于群体智能的优化算法,通过模拟鸟群觅食行为来寻找最优解。
在PSO中,每个候选解被称为一个粒子,粒子在空间中移动,并根据自己的经验和邻居的经验来更新自己的位置和速度。
PSO常用于求解连续优化问题,包括函数最小值的求解。
粒子群算法的基本原理是模拟鸟群觅食行为。
鸟群中的每个鸟通过与邻居的信息交流来调整自己的飞行方向。
在空间中,每个粒子代表一个解,其位置表示解的位置,速度表示解的方向和速度。
粒子的更新以全局最优解和局部最优解为依据,通过不断迭代空间,寻找最优解。
1.初始化粒子群:随机生成一些粒子,并给定每个粒子的位置和速度。
2.计算适应度:根据适应度函数计算每个粒子的适应度。
3.更新粒子的速度和位置:根据经验和邻居信息,更新每个粒子的速度和位置。
4.更新局部最优解:根据更新后的位置,更新每个粒子的局部最优解。
5.更新全局最优解:根据所有粒子的局部最优解,更新全局最优解。
6.判断终止条件:判断是否达到终止条件,如果满足则算法停止;否则返回步骤3在PSO算法中,粒子的速度和位置的更新公式为:v(i+1) = w * v(i) + c1 * rand( * (pbest(i) - x(i)) + c2 * rand( * (gbest - x(i))x(i+1)=x(i)+v(i+1)其中,v(i)表示第i个粒子的速度,x(i)表示第i个粒子的位置,w表示惯性权重,c1和c2表示加速度系数,pbest(i)表示第i个粒子的局部最优解,gbest表示全局最优解,rand(表示一个0到1之间的随机数。
总之,粒子群算法是一种基于群体智能的优化算法,通过模拟鸟群觅食行为来最优解。
它具有简单、易于实现和理解的优点,在各个领域有广泛的应用。
但是,也需要根据具体情况选择算法参数以及采取一些措施来克服其缺点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基本PSO算法(续)
Reynolds仅仅将其作为CAS的一个实例作 仿真研究,而并未将它用于优化计算中 。 Kennedy和Eberhart在CAS中加入了一 个特定点,定义为食物,鸟根据周围鸟的觅食 行为来寻找食物。他们的初衷是希望通过这种 模型来模拟鸟群寻找食源的现象,然而实验结 果却揭示这个仿真模型中蕴涵着很强的优化能 力,尤其是在多维空间寻优中。
23
简而言之(1)
• PSO初始化为一群随机粒子(随机解)。 然后通过迭代寻找最优解。每次迭代中, 粒子通过跟踪两个极值(pbest:某个粒子 到现在为止发现的最好位置。 gbest:整个 群体到目前为止发现的最好位置)来更新 自己。更新的公式如下:
24
简而言之(2)
(1)速度更新:
Vi=Vi+c1*rand()*(pbesti-xi)+c2*rand()*(gbesti-xi)
PSO产生背景之一:复杂适应系统
(CAS)
CAS理论的最基本的思想可以概述如下: 我们把系统中的成员称为具有适应性的主体 (Adaptive Agent),简称为主体。所谓具有适应 性,就是指它能够与环境以及其它主体进行交流, 在这种交流的过程中“学习”或“积累经验”, 并且根据学到的经验改变自身的结构和行为方式。 整个系统的演变或进化,包括新层次的产生,分 化和多样性的出现,新的、聚合而成的、更大的 主体的出现等等,都是在这个交流的基础上出现 15 的。
11
算法介绍
• PSO算法是一种进化计算技术 (evolutionary computation),由Eberhart 博士和Kennedy博士于1995年提出 (Kennedy J, Eberhart R. Particle swarm optimization. Proceedings of IEEE International Conference on Neural Networks.1995,1942~1948).其基本思想是 通过群体中个体之间的协作和信息共享来 寻找最优解。
复杂适应系统(CAS)续
CAS的四个基本特点: • 首先,主体(Adaptive Agent)是主动的、活的实体; • 其次,个体与环境(包括个体之间)的相互影响,相 互作用,是系统演变和进化的主要动力; • 再次,这种方法不象许多其他的方法那样,把宏观 和微观截然分开,而是把它们有机地联系起来; • 最后,这种建模方法还引进了随机因素的作用,使 它具有更强的描述和表达能力。
10
五点原则
• Millonas在开发人工生命算法的时候(1994), 提出群体智能概念,并提出五点原则: • 1、接近性原则:群体应能够进行简单的时空运算 • 2、优质性原则:群体能够响应环境要素 • 3、变化相应原则:群体不应把自己的活动限制在 一个狭小范围内 • 4、稳定性原则:群体不应每次随环境改变自己的 模式 • 5、适应性原则:群体的模式应在变化代价值时得 到改变
12
James Kennedy received the Ph.D. degree from theUniversity of North Carolina, Chapel Hill, in 1992.He is with the U.S. Department of Labor, Washington,DC. He is a Social Psychologist who has been working with the particle swarm algorithm since 1994. He has published dozens of articles and chapters on particle swarms and related topics, in computer science and social science journals and proceedings. He is a coauthor of Swarm Intelligence (San Mateo, CA: Morgan Kaufmann, 2001), with R.C. Eberhart and Y. Shi, now 13 in its third printing.
(2)
(1)
基本PSO算法(续)
•粒子群初始位置和速度随机产生,然后按 公式(1)(2)进行迭代,直至找到满意的解。 •目前,常用的粒子群算法将全体粒子群 (Global)分成若干个有部分粒子重叠的相邻 子群,每个粒子根据子群(Local)内历史最 优Pl调整位置,即公式(2)中Pgd换为Pld。
(2)
位置更新: xi=xi+vi
其中c1和c2是学习因子,通常取c1=c2=2 在每一维,粒子都有一个最大限制速度Vmax。 应将Vi限制在[-Vmax,Vmax]之间。
25
简而言之(3)
• 1998年shi等人在进化计算的国际会议上发表 了一篇论文《a modified partilce swarm optimizer》对前面的公式进行了修正,引入 了惯性权重因子:
第六章 粒子群算法
简介
•起源
–生物社会学家对鸟群捕食的行为研究。
•原理
–我们可以设想这样的一个场景,一群鸟再随机搜寻食 物。这个区域里只有一块食物。所有的鸟都不知道食 物再哪里,但他们知道目前距离食物还有多远,那么 找到食物的最佳策略是什么?最简单的方法就是找寻 距离食物最近的鸟之周围区域及根据自己本身飞行的 经验判断食物的所在。
17
基本PSO算法
粒子群优化算法源于1987年Reynolds对鸟群社会系 统boids的仿真研究,boids是一个CAS。在boids中, 一群鸟在空中飞行,每个鸟遵守以下三条规则: 1)避免与相邻的鸟发生碰撞冲突; 2)尽量与自己周围的鸟在速度上保持协调和一致; 3)尽量试图向自己所认为的群体中靠近。 仅通过使用这三条规则,boids系统就出现非常 逼真的群体聚集行为,鸟成群地在空中飞行,当遇 到障碍时它们会分开绕行而过,随后又会重新形成 群体。
8
• 而生物社会学家E.O.Wilson依据对鱼群的 研究提出:至少在理论上,鱼群的个体成 员能够受益于其它个体在寻找食物过程中 的发现和以前的消耗,这种收益超过了个 体之间竞争造成的利益损耗。这说明同种 生物之间信息的社会共享能够带来好处。 这也是PSO的基础。
9
特点
• • • • 分散式搜寻 具有记忆性 元件较少,容易实现 适合在连续性的范围内搜寻
2
3
• 对不同的群体研究有不同的应用,目前最 引人瞩目的是蚁群和鸟群的研究。 • PSO就是模拟鸟群的社会行为发展而来的。
4
背景
• 我们经常看到成群的鸟或鱼或其它生物, 它们的聚集行为有利于捕食和逃生。它们 数量庞大且通常不存在一个统一的指挥者。 群体的动作由什么决定的呢?
5
鸟群觅食行为
Food
基本PSO算法(续)
vid (t 1) w vid (t ) c1 rand ( ) [ pid (t ) xid (t )] c2 rand ( ) [ p gd (t ) xid (t )]
xid ( t 1) xid (t ) vid (t 1) 1 i n 1 d D
• Vi=w*Vi+c1*rand()*(pbesti-xi)+c2*rand()*(gbesti-xi)
w非负,称为惯性因子。
26
简而言之(4)
• 这样的PSO称为标准PSO算法。w大则全局寻优能力强, 局部寻优能力弱。w小则反之。实验发现,动态改变w效 果可能更好。目前采用较多的是线性递减权值(linearly decreasing weight,LDW)策略: • • w(t) = (wini - wend)(Gk-g)/Gk + wend • • Gk为最大进化代数,wini为初始惯性权值,wend为迭代至 最大代数时惯性权值。典型取值为:wini= 0.9, wend = 0.4. g是当前代数,w(t)应该改成w(g)为妥。
16
PSO产生背景之二:人工生命
人工生命“是来研究具有某些生命基本特征的人 工系统。人工生命包括两方面的内容: ① 研究如何利用计算技术研究生物现象; ② 研究如何利用生物技术研究计算问题(Nature Computation)。 我们现在关注的是第二部分的内容。现在已经有很 多源于生物现象的计算技巧,例如, 人工神经网络是 简化的大脑模型. 遗传算法是模拟基因进化过程的。 现在我们讨论另一种生物系统:社会系统,更确切地 说,是由简单个体组成的群落与环境以及个体之间的 互动行为,也可称做"群智能"。
Russell C. Eberhart (M’88–SM’89– F’01) received the Ph.D. degree in electrical engineering from Kansas State University, Manhattan.He is the Chair and Professor of Electrical and Computer Engineering, Purdue School of Engineering and Technology, Indiana University–Purdue University Indianapolis (IUPUI),Indianapolis, IN. He is coeditor of Neural Network PC Tools(1990),coauthor of Computational Intelligence PC Tools (1996), coauthor of Swarm Intelligence(2001), Computational Intelligence: Concepts to Implementations(2004). He has published over 120 technical papers.Dr. Eberhart was awarded the IEEE Third Millenium Medal. In 2002, he became a Fellow of the American Institute for 14 Medical and Biological Engineering.