AEP定位器说明书
吴忠定位器

l 连接端子前请确认电源是否切断 l AEP 系列智能阀门定位器 带阀位输出除外 使用 4 20mA 直流电源 动作所需最小电流 标
准型 3.2mA 带 HART 型 3.8mA 最大电流不得超过 24mA l 当 AEP 系列智能阀门定位器带阀位输出功能时 需向阀位输出模块提供 9 27V 直流电压 最
4
´ËΪÊÔÓð棬ÈçÐè×¢²á£¬ÇëÒƲ½£º
Îı¾´Á¼Ç
WUZHONG INSTRUTMENT CO., LTD
五 . 内部结构
AEP 直行程智能定位器内部结构如下图所示 角行程除了反馈杆其它部分相同 内部结构采用简单 模块化的设计 使得维修很方便
内容 种类
AUTO1 AUTO2 AUTO3 BIAS
V-O
零点
〇 〇
量程
〇 〇
KP,KI, KD
〇 〇
BIAS
〇 〇 〇 〇
V-O
RA/DA
〇
〇
〇
〇
〇
〇
〇
1. 自动设定 1 AUTO1 当阀门厂已设定好 AEP 参数安装到现场后 用户需进行自动设定时建议执行 AOTU1 自动设定 步骤如下 在正常模式下 按住 ENTER 键 6 秒 液晶会闪烁并出现 AUTO CAL 字样 在 AUTO CAL 状态下 按一次 ENTER 键 液晶上出现 AOTU1 在 AOTU1 模式 按 ENTER 键 则进行 AOTU1 自动设定 当 AOTU1 自动设定结束后 液晶上会显示 COMPLETE 文字 过 4 秒钟后自动返回 RUN 模式 并显示当前阀门开度
确保整个系统的安全
Amprobe UAT-600地下设施定位器系列用户说明书
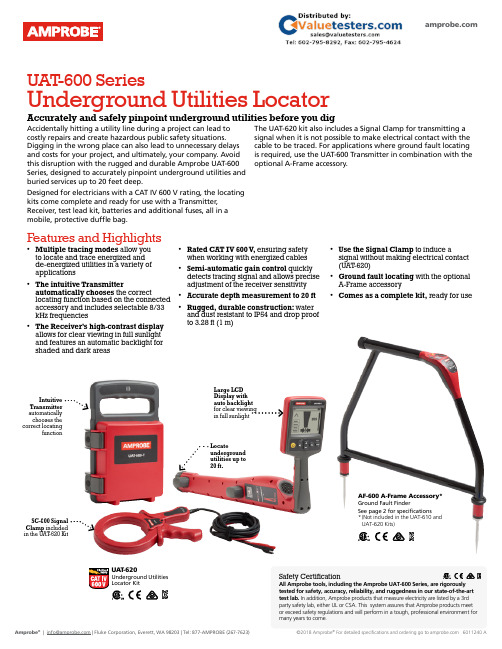
Accidentally hitting a utility line during a project can lead to costly repairs and create hazardous public safety situations. Digging in the wrong place can also lead to unnecessary delays and costs for your project, and ultimately, your company. Avoid this disruption with the rugged and durable Amprobe UAT-600 Series, designed to accurately pinpoint underground utilities and buried services up to 20 feet deep.Designed for electricians with a CAT IV 600 V rating, the locating kits come complete and ready for use with a Transmitter, Receiver, test lead kit, batteries and additional fuses, all in a mobile, protective duffle bag.The UAT-620 kit also includes a Signal Clamp for transmitting a signal when it is not possible to make electrical contact with the cable to be traced. For applications where ground fault locating is required, use the UAT-600 Transmitter in combination with the optional A-Frame accessory.Intuitive Transmitter automatically chooses the correct locatingfunctionSC-600 Signal Clamp included in the UAT -620 KitLarge LCD Display with auto backlight for clear viewing in full sunlightLocateunderground utilities up to 20 ft.UAT -600 SeriesUnderground Utilities LocatorAccurately and safely pinpoint underground utilities before you digUAT -620Underground Utilities Locator KitAF-600 A-Frame Accessory*Ground Fault FinderSee page 2 for specifications* (Not included in the UAT-610 and UAT-620 Kits)Safety CertificationAll Amprobe tools, including the Amprobe UAT-600 Series, are rigorously tested for safety, accuracy, reliability, and ruggedness in our state-of-the-art test lab. In addition, Amprobe products that measure electricity are listed by a 3rd party safety lab, either UL or CSA. This system assures that Amprobe products meet or exceed safety regulations and will perform in a tough, professional environment formany years to come.Features and Highlights• Multiple tracing modes allow you to locate and trace energized and de-energized utilities in a variety of applications• The intuitive Transmitterautomatically chooses the correctlocating function based on the connectedaccessory and includes selectable 8/33kHz frequencies• The Receiver’s high-contrast display allows for clear viewing in full sunlight and features an automatic backlight for shaded and dark areas• Rated CAT IV 600 V , ensuring safety when working with energized cables • Semi-automatic gain control quickly detects tracing signal and allows precise adjustment of the receiver sensitivity• Accurate depth measurement to 20 ft• Rugged, durable construction: water and dust resistant to IP54 and drop proof to 3.28 ft (1 m)• Use the Signal Clamp to induce asignal without making electrical contact (UAT -620)• Ground fault locating with the optional A-Frame accessory • Comes as a complete kit, ready for useLCD Display with autobacklightDetect ground faults on cables and pipesAF-600-A-FrameGround Fault FinderAF-600 A-FrameGround Fault FinderSave time and money by pinpointing leakage pointsGround faults are a common problem with electrical cables. Find any fault with the AF-600 A-Frame cable ground fault finder, specifically designed for use with the Amprobe UAT -600 Series.Set up the UAT -600-T Transmitter to apply a fault find signal to the utility under test, the AF-600 A-Frame receives the signal and locates the place of the fault. The AF-600 will pinpoint where a cable metal conductor (either a sheath or a metallic conductor of the wire) touches the ground and can also detect other conductors to ground faults such as pipeline coating defects.Carrying Case, User ManualThe AF-600 comes complete with batteries and a carrying caseFeatures and Highlights • Identify any point of leakage around a cable • Locate cable and wire ground faults, sheath faults or pipeline coating defects, where the utility is in direct contact with the ground • Find the exact point where metal is touching the ground and power is leaking, ie, a shield is rusted or a rubber buffer is broken, creating noise on a cable • Advanced technology and digital signal processing makes pinpointing process fast, accurate and clear:-Compass guidance with numeric fault field strength indicates the direction of the fault -Distance sensitive left and right arrows guides the user to precisely follow the path of the buried utility-Automatic gain control quickly detects tracing signal and precisely adjusts the A-Frame sensitivity-Adjustable volume controlsClearly view the LCD display in bright sunlightPinpoint fault location by using the AF-600 with the UAT-600 TransmitterSC-600Signal ClampTL-UAT -600Test Leads KitSC-600 Signal Clamp(included in the UAT -620 Kit only)The Signal Clamp accessory provides an efficient and safe method of applying a locate signal to a cable, enabling the Transmitter to induce a signal through the insulation into the wires or pipes. The clamp works on low impedance closed circuits only.Test Leads Kit(included in the UAT -610 and UAT -620 Kits)TL-UAT -600 Test Leads Kit includes: Black test lead with detachable black alligator clip, Red test lead with permanently attached red alligator clip, Ground stakeTrace an individual utility by connecting the The Transmitter will automatically change modes The Receiver’s high contrast LED screen is easy toUAT-620 Underground Utilities Locator Kit。
SNCR调节门AEP300说明书

AEP-300R 双作用
3.2mA(标准型),3.8mA(带 Hart) 1.4~7kgf/cm (0.14~0.7MPa) 10~150mm 0~60°、0~90° 最大 500Ω/20mA DC RC1/4, NPT1/4 RC1/8, NPT1/8 G1/2(标准型),NPT1/2(选项) IP66 -30~80℃ ±0.5 %F.S. 0.5 %F.S. ±0.2 %F.S. 0.3 %F.S. 70LPM 2LPM 以下(输入压力为 1.4 kgf/cm 时) ,3LPM 以下(输入压力为 7 kgf/cm 时) 保管温度:-30~85℃,工作温度:-10~70℃ 线性、快开、等百分比、用户自定义(可设定 16 点) 6G 5~95RH(40℃时) HART 通讯(无 DDL) 4~20mA(DC 10~30V) 压铸铝 1.5kg(3.3ib) 环氧聚酯电喷 天蓝色或黑色
1 阀位反馈功能
2
Hart 协议
L
作用型式
直行程
R
角行程
S
防护型式
单作用
D
双作用
N
内置限位开关
普通型
A
本安型
B
隔爆型
0
气路接口
无
1
有
1
反馈杆型式 直行程 角行程
RC 1/4
2
NPT1/4
A 小于 40mm A M6X40L
B
20~70mm
C 70~100mm D 100~150mm D M8X63L E NAMUR
输出特性
自动/手动开关
开关设为自动时,按 AEP-300 的动作要求,向执 行机构输入气源压力;开关设为手动时,管道气 源压力不受 AEP-300 动作控制,直接输入执行机 构。
OSP-E..BP 线性电动执行器带有齿形带和对开式底座说明书

33Linear Actuator with Toothed Beltand Bi-Parting CarriersSeries OSP-E..BP3435Stainless steel sealing bandThreaded holes for motor mounting (on two sides)Low friction support ringsThreaded holesPermanent magnet for position sensingSlotted profilewith dovetail groovesBelt tension adjustmentStandard carrier mountingThreadedmounting holesDrive shaftToothed beltStandard carrier mountingNipples formaintenance greasingBall bearingELECTRIC LINEAR ACTUATOR FOR SYNCHRONIZED BI-PARTING APPLICATIONSThe System ConceptA completely new generation of linear drives which can be integrated into any machine layout neatly and simply.POWERSLIDE Roller bearingprecision guidance for smooth travel and high dynamic or static loads.GUIDELINE linear guides for heavy duty applications.The dovetailed mounting rails of the new linear actuator expand its function into that of a universal system carrier.Modular system components are simply clamped on.PROLINE The compact aluminium roller guide for high loads and velocities.Install the OSP System tosimplify design work! The files are compatible with all popular CAD systems and package hardware.Data Sheet No. 1.25.001E-2Data Sheet No. 1.25.001E-3Advantages:■Precise synchronized bi-parting movements■Precise path and position control ■High speed operation ■Easy installation ■Low maintenance■Ideal for centering and door operating applicationsFeatures:■Integrated drive and guidance system ■Complete motor and control packages ■Diverse range of accessories and mountings ■Special options availableLinear Actuator with Toothed Belt and Bi-Parting CarriersNipples formaintenance greasingSTANDARD VERSIONS OSP-E..BPData sheets 1.25.002E-1, -2Standard carrier with integral guidance.Dovetail profile for mounting of accessories and the actuator itself.BASIC ACTUATOR OPTIONSDRIVE SHAFT OPTIONS MOUNTINGS FOROSP-E25 TO E50CLEVIS MOUNTINGData sheet 1.45.021ECarrier mounting for driving loadssupported by external linear guides.END CAP MOUNTINGData sheet 1.45.022EFor end-mounting of the actuatorMID-SECTION SUPPORTData sheet 1.45.023EFor supporting long actuators ormounting the actuator on the dovetailgrooves.INVERSION MOUNTINGData sheet 1.45.025EThe inversion mounting, mounted onthe carrier, transfers the driving forceto the opposite side, e.g. for dirtyenvironments..ACCESSORIESPROXIMITY SENSORSERIES RS AND ESData sheet 1.45.101EFor electrical sensing of end andintermediate carrier positions.MOTOR MOUNTINGSData sheet 1.45.028EAccessoriesOPTIONS AND ACCESSORIESData Sheet No. 1.25.001E-4A 3 P 1 5 3 E 0 0 I Z 5 0 X T e c h n i s c h e Än d e r u n g e n v o r b e h a l t en SERIES OSP-E, BI-PARTING BELT DRIVEN3637Linear Actuator withToothed Belt and Bi-Parting CarriersSeries OSP-E..BP Size 25, 32, 50A 1P 638E 00I Z 00XData Sheet No. 1.25.002E-1ORIGASYSTEMPLUSOSPT h e r i g h t t o i n t r o d u c e t e c h n i c a l m o d i f i c a t i o n s i s r e s e r v e dStandard Versions:•Standard carrier with integral guidance.•Dovetail profile for mounting of accessories and the actuator itself.Special Versions:•Position of Drive ShaftsMaintenanceAll moving parts are long-term lubricated for a normal operational environment. We recommend a check and lubrication of the linear actuator,and if necessary a change of the toothed belt and wear parts, after an operation time of 12 months ofoperation or 3 000 km, depending on the type of application.Additional greasing is easily done by using nipples in the slotted profile.Please see separate missioningThe products in this datasheet should not be operated until the machine/application in which they are used has passed necessary inspection.Installation InstructionsUse the threaded holes in the end cap for mounting the linear actuator.See if mid-section supports areneeded using the maximum allowable unsupported length graph on data sheet 1.25.002-E-3At least one end cap must be secured to prevent axial sliding when mid-section support is used.When the linear actuator is moving an externally guided load, the clevis mounting should be used (see on data sheet 1.45.021E).The linear actuators can be fitted with the standard carrier mounting facing in any direction.To prevent contamination such as fluid ingress, the actuator should be fitted with its sealing band facing downwards.The inversion mounting can be fitted to transfer the driving force to the opposite side (see on data sheet 1.45.025E).38Sizing Performance Overview Maximum LoadingsSizing of Linear ActuatorThe following steps are recommended for selection:1.Required acceleration is shown in graphs on data sheet 1.25.002E-4.2.Required torque is shown on data sheet 1.25.002E-5.3.Check that maximum values in the adjacent charts are not exceeded.4.Check max. allowable torque on drive shaft by using table T2.(Pay attention to note under table)If value is lower than required,overview the moving profile or select if possible a bigger unit.5.Before sizing and specifying the motor, the average torque must be calculated using the cycle time of the application.6.Check that the maximum allowable unsupported length is not exceeded (see on data sheet 1.25.002E-3).Data Sheet No. 1.25.002E-2Combined LoadingsIf several forces and moments are applied to the linear actuatorsimultaneously, then the following equation must be fulfilled in addition to the maximum loadings stated beside.39Size Min. Z Min. øOSP-E25BP 2438OSP-E32BP 2438OSP-E50BP3657Data Sheet No. 1.25.002E-3Maximum Allowable Unsupported Length Stroke LengthStroke LengthsThe stroke lengths of linear actuators are available in multiples of 1 mm up max. 2 x 2500 mm(OSP-E25BP: max. 2 x 1500 mm).Other stroke lengths are available on request.The end of stroke must not be used as a mechanical stop.Allow an additional safety clearance at both ends equivalent to the linear movement of one revolution of the drive shaft.The use of an AC motor with frequency converter normally requires a larger safety clearance than that required for servo systems.For advise, please contact your local HOERBIGER-ORIGA technical support department.When mechanical stops arerequired, external shock absorbers should be used (see separate catalogue).Align the centre line of the shock absorber as closely as possible with the object‘s centre of gravity.Mounting on the Drive Shaft Do not expose the drive shaftto uncontrolled axial or radial forces when mounting coupler or belt wheel,a steadying block should be used.Belt wheelsMinimum allowable number of teeth Z (AT5) at maximum applied torque.Required AccelerationDistance-Time GraphUsing the required travel distance and total time, the adjacent graphs show the required acceleration based on maximum speed.The graphs assume that acceleration and deceleration are equal.Please note that specifying non-essential high acceleration or short cycle time will result in an oversized motor.40Data Sheet No. 1.25.002E-441Data Sheet No. 1.25.002E-5Required TorqueUsing the known mass, the direction of the application and the required acceleration from the distance-time graphs, the linear actuator can be sized and the required torque is shown in the adjacent graphs.Mass in graphs = Load + movingmass of the linear actuator (according to the weight chart on data sheet 1.25.002E-1).Please note:When using an additional guide,please add the mass of the carriage to the total moving mass.42*The end of stroke must not be used as a mechanical stop.Allow an additional safetyclearance at both ends equivalent to the linear movement of one revolution of the drive shaft.The use of an AC motor with frequency converter normally requires a larger safety clearance than that required for servo systems.For advise, please contact your local HOERBIGER-ORIGAtechnical support department.Dimension KM (mm)Size KM min KM rec.251301903217023050220320Data Sheet No. 1.25.002E-6Position of Drive Shaft Position of Drive Shaft Position of Drive ShaftData Sheet No. 1.25.002E-743。
AM AE系列智能型角行程电动执行机构 说明书
AM/AE系列智能型角行程电动执行机构 使 用 说 明 书一、产品用途AMR/AER 系列一体化智能型电动执行器是采用先进的智能数字控制技术,无需另外配置反馈单元和伺服放大器,可直接接收工业控制仪表或计算机输出的4-20mA.信号,对各种工业球阀、蝶阀或转动装置实现0-90°范围内准确位置定位和控制。
该产品不仅提高了电动执行机构位置控制的精度,而且实现了小型化、智能化、一体化(控制器与执行机构合为一体)。
与传统的电动执行机构相比,具有体积小、重量轻、扭矩大、精度高、功能强、性能可靠、运转成本低、不需维护保养等特点,可广泛应用于电站、石油、化工、冶金、医药、轻工等行业。
产品分为普通型和防爆型,两者外型安装尺寸相同.适用于含有IIC 类爆炸性气体环境中,温度级别为CT6。
二、规格与型号本产品有开关式和调节式两大系列。
开关式电动执行机构主要用于两位式位置定位和控制,无需配置EVP 系列智能控制器。
调节式电动执行机构主要用于连续角位移转动,在0-90°范围内任意位置的定位和控制,要求配置EVP 系列智能控制器。
产品具体规格和型号分别见表1和表2开关式电动 执行机构型号 AER-10AER-25 AER-60 AER-160 AER-250 AER-400 AER-600 输出轴力矩(N.m) 1002506001600250040006000调节式电动*普通调节型可选配红外遥控型智能控制器(内置式)防爆调节型可选配远红外智能控制器(外置式)。
三、主要技术性能·电 源:交流220V±10%,50Hz60Hz ·控制精度:0.5%-3.1%可设·输入信号:4-20mA DC 或1-5V DC ·输入阴抗:200Ω·位置反馈信号:光电隔离输出4-20mA DC 对应执行机构全闭至全开或全开至全闭 ·位置反馈电阻:500Ω-1KΩ ·定位方式选择:手动自动·作用方式选择:正作用/反作用 ·自动定位标定:全开/全闭 ·开关触点容量:交流250V,4A·安全位置选择:输入信号故障时电动执行机构所处位置可选为全开/停止/全闭执行机构型号 AMR-10 AMR-25 AMR-60 AMR-160 AMR-250 AMR-400 AMR-600 输出轴力矩(N.m)1002506001600250040006000·保护功能:内置过热保护器,同时具有软件、电气和机械三重限位保护。
KOSO EP800系列阀门定位器
·若是单作用定位器,可用 A-M(自动—手动)机构将阀开度调到 50%后,再调整定位器的安装位置(参照 10-1.)。
6-1.耐压填料式
6-2.密封接头式
6-3. 使用注意事项
7.本质安全型结构 ………………………………………………………… 11~12
7-1.使用
7-2.外部电缆的连接
7-3. EP□82□安全栅的配置
7-4. 使用注意事项
8.调整 ……………………………………………………………………… 12~13
·装在转轴上的凸轮若与使用工况不同时(图 2),请将凸轮翻面安装。 ·首先将凸轮座翻转,取下 M5 螺母(见图 3)。 ·将凸轮从轴上卸下并翻个面(见图 4)。 ·把转轴的 M5 螺纹端装入凸轮的腰形孔,并将弹簧嵌入凸轮钩孔内。 ·转动反馈轴,使凸轮腰形孔与轴的扁平部对准并安装好(见图 5)。 ·将 M5 螺母拧入凸轮轴螺纹部位。 ·将凸轮翻过来,检查凸轮面的安装是否正确。
3-1.产品型号及形式
3-2.凸轮形式
3-3.各种型号的特点
4.动作原理 ……………………………………………………………………… 4
4-1.双动作型
4-2.单动作型
5.安装 ………………………………………………………………………… 5~9
5-1. 凸轮及凸轮部件的安装
5-1-1.801、802、808 系列凸轮的安装
5-1-2.804、805 系列凸轮安装位置的确认
5-2. 定位器与执行机构的连接
5-2-1.801 系列的安装
5-2-2.804 系列的安装
5-2-3.805 系列的安装
5-2-4.802、808 系列的安装
山武 SVP3000 Alphaplus 智能阀门定位器 AVP100 102 使用说明书

株式会社山武SVP3000 Alphaplus智能阀门定位器型号:AVP100/102使用说明书CM4-AVP100-20011版:2005年8月参考英文CM2-AVP100-2001 2版型号AVP100/102-SVP3000 Alphaplus智能阀门定位器i前言ii型号AVP100/102-SVP3000 Alphaplus智能阀门定位器前言型号AVP100/102-SVP3000 Alphaplus智能阀门定位器iii目录第一章:前言1-1 : SVP型号.......................................................................................................................................1-1 1-2 : 通信..............................................................................................................................................1-2 1-2-1: 手动通信...............................................................................................................................1-2 1-2-2: 使用现场智能通信装置(SFC)............................................................................................1-2 1-2-3: 使用HART通信装置.............................................................................................................1-2 1-2-4: HART通信装置(用于AVP102型).....................................................................................1-3 1-3 : SVP示意图....................................................................................................................................1-4第二章:安装2-1 : SVP装配.......................................................................................................................................2-3 2-1-1: 安装SVP反馈杆...................................................................................................................2-3 2-2 : SVP安装步骤................................................................................................................................2-5 2-3 : 气源..............................................................................................................................................2-7 2-4 : SVP初始调整................................................................................................................................2-8 2-5 : 电气接线.......................................................................................................................................2-9 2-5-1: 接线原则...............................................................................................................................2-10 2-5-2: 接线步骤...............................................................................................................................2-10 2-6 : 用于无弹簧双作用执行机构的SVP(双作用放大器)...................................................................2-11 2-6-1: 将双作用放大器安装到SVP上..............................................................................................2-12 2-6-2: 不带过滤减压阀直接安装的双作用SVP................................................................................2-13 2-6-3: 将双作用SVP安装到薄膜执行机构上...................................................................................2-14 2-6-4: 将双作用SVP安装到角行程执行机构上...............................................................................2-14 2-6-5: 自动设定...............................................................................................................................2-15第三章:调整3-1 : 自动设定.......................................................................................................................................3-1 3-1-1: 用开度开关进行自动设定....................................................................................................3-2 3-2 : 零点-量程调整.............................................................................................................................3-3 3-3 : 现场智能通信装置.........................................................................................................................3-5 3-4 : SFC键盘操作................................................................................................................................3-6 3-5 : SFC出错.......................................................................................................................................3-6 3-6 : SFC开始通信................................................................................................................................3-6 3-7 : 用现场智能通信装置进行自动设定和零点-量程调整...................................................................3-7 3-8 : 手动SVP设定...............................................................................................................................3-11 3-9 : 用SFC设定控制信号/阀门开度之间的关系.................................................................................3-14 3-9-1: 示例......................................................................................................................................3-15 3-10 : 确认SVP输入信号、EPM输出和阀门开度输出..........................................................................3-18目录第四章:使用HART 通信装置进行配置4-1 : HART 通信装置的功能...................................................................................................................4-24-2 : 启动通信......................................................................................................................................4-44-3 : 确认和修改一般信息.....................................................................................................................4-64-3-1: 设备信息..............................................................................................................................4-64-3-2: 厂商.....................................................................................................................................4-74-4 : 设备条件.......................................................................................................................................4-84-4-1: 电流输入值 (单位:mA )..................................................................................................4-84-4-2: 输入信号% (百分比) 值 (单位:%)...........................................................................4-84-4-3: 阀门开度 (单位:%).......................................................................................................4-84-4-4: 驱动信号(EPM (电-气转换器模块) 驱动信号) (单位:%)......................................4-84-4-5: 温度 (设备内部温度) (单位:℃)...............................................................................4-84-4-6: 上次配置数据......................................................................................................................4-94-5 : 配置和标定(设备设定和标定)..................................................................................................4-104-5-1: Mode (切换SVP 模式)......................................................................................................4-104-5-2: Input signal range (设定电流输入值)................................................................................4-104-5-3: Valve sys config (阀门系统配置)......................................................................................4-114-5-4: Dynamic chara (动态特性)................................................................................................4-124-5-5: Valve chara (阀门特性)....................................................................................................4-144-5-6: Tvl cut off (开度截止).......................................................................................................4-154-5-7: Calibrate (标定)................................................................................................................4-164-5-8: Diag parameters (诊断参数)............................................................................................4-184-5-9: Burst mode (触发模式)......................................................................................................4-254-6 : 初始设定.......................................................................................................................................4-264-7 : Maintenance (维修)..................................................................................................................4-274-7-1: Dummy input sig (仿真输入信号).....................................................................................4-274-7-2: Dummy drive sig (仿真驱动信号)......................................................................................4-274-7-3: User data save (用户数据保存).........................................................................................4-284-7-4: Correct reset (修正复原)....................................................................................................4-284-8 : Device status (设备状态)............................................................................................................4-294-8-1: Failures (故障)...................................................................................................................4-294-8-2: Notices (提示)...................................................................................................................4-294-8-3: Valve diagnostics (阀门诊断).............................................................................................4-30目录第五章:维修5-1 : 自动/手动选择开关......................................................................................................................5-1 5-1-1: A/M开关的结构..................................................................................................................5-1 5-1-2: 操作步骤...............................................................................................................................5-2 5-2 : 滤网更换和节气喷嘴维修..............................................................................................................5-3 5-3 : 清洁挡板.......................................................................................................................................5-4 5-4 : EPM (电-气转换器模块)平衡调整..........................................................................................5-5 5-5 : 绝缘电阻测试................................................................................................................................5-6 5-5-1: 测试步骤...............................................................................................................................5-6 5-5-2: 判定标准...............................................................................................................................5-6 5-6 : 使用带增幅器的SVP时的调整步骤...............................................................................................5-7 5-7 : 默认内部数据值表.........................................................................................................................5-8 5-8 : SVP 内部方框图和SVP I/O流程图.................................................................................................5-9第六章:故障排除6-1 : 故障排除.......................................................................................................................................6-1 6-1-1: 使用SFC...............................................................................................................................6-1 6-1-2: 使用HART通信装置.............................................................................................................6-2 6-1-3: 一般故障排除方法................................................................................................................6-2插图列表图 1-1概况.............................................................................................................................1-1图 1-2山武现场智能通信装置.................................................................................................1-2图 1-3HART 通信结构.............................................................................................................1-3图 1-4SVP 示意图...................................................................................................................1-4图 2-1SVP 反馈杆...................................................................................................................2-3图 2-2SVP 最大动作范围........................................................................................................2-4图 2-3....................................................................................................................................2-4图 2-4....................................................................................................................................2-5图 2-5....................................................................................................................................2-6图 2-6....................................................................................................................................2-7图 2-7....................................................................................................................................2-8图 2-8....................................................................................................................................2-9图 2-9....................................................................................................................................2-11图 2-10双作用放大器已安装到SVP 上.....................................................................................2-12图 2-11不带过滤减压阀直接安装的双作用SVP........................................................................2-13图 3-1....................................................................................................................................3-3图 3-2....................................................................................................................................3-4图 3-3....................................................................................................................................3-14图 3-4....................................................................................................................................3-14图 3-5....................................................................................................................................3-15图 3-6流量特性概况...............................................................................................................3-16图 4-1HART 通信装置.............................................................................................................4-1图 4-2HART 通信结构.............................................................................................................4-5图 4-3.....................................................................................................................................4-15图 4-4强制全开值和强制全关值.............................................................................................4-15图 5-1A/M 开关的结构...........................................................................................................5-1图 5-2从自动(正常)操作状态切换到手动操作状态...........................................................5-2图 5-3从手动操作状态切换到自动操作状态...........................................................................5-2图 5-4A/M 开关......................................................................................................................5-3图 5-5EPM 平衡调整..............................................................................................................5-4图 5-6EPM 平衡调整..............................................................................................................5-5图 5-7SVP 方框图...................................................................................................................5-9图 5-8SVP I/O 流程图.............................................................................................................5-10插图列表各部分说明1-2 :通信有三种与SVP 通信的方法:手动;使用现场智能通信装置(SFC );或使用HART 通信装置。
华仪定位器说明书

EPPvHEP 系列电/气阀门定位器一、概述EPPvHEP 系列电/气阀门定位器 是引进国外先进技术,由本厂开发成功的产品。
本产品经“机械电子工业 自动化仪表产品质量监督检测中心”型式试验,其技术性能均达到国外同类产品水平,并经“国家级仪器 仪表防爆安全监督检验站”检验合格,获得国家级防爆合格证书。
本定位器的作用是把调节装置输出的电信号变成驱动调节阀动作的气信号,而且具有阀门定位功能,即克 服阀杆摩擦力,抵消被调价质压力变化而引起的不平衡力,从而使阀门开度对应于调节装置出的控制信号实现正确定位。
由于本定位器具有防爆结构,故能使用于爆炸危险场所。
二、特点1. 弓I 进国外先进技术,具有可靠性高、体积小、重量轻等特点。
2. 磁电组件部分采用新型动圈结构,可靠、稳定、线性好。
3. 除防爆接线盒外,在危险性区域现场可打开壳盖进行调整及检修。
4. 量程、零点调整钮采用手轮式,调整方便、并带有锁定装置。
5. 配有与各类型执行机构相配的安装板及附件,故安装容易,调整方便。
6. 防爆性能:本安型防爆等级iallCT5隔爆型防爆等级d IICT6三、型号、规格辅入维号范司L 4j -20uiADCO-KmADC 3 1 卜!5TDC4 4^]2ui ADC 12-20mADCEFP □ □ C □ □ □匚rr 阿备武嫌压阀—|不带组合如丽□td0.14—0 )6Mpa0.17^.5Mpa2 尊百分比1 正件用HEP □ □口56 本安1 普通1 单作用1裁作用1 经性2 尊百分比3 快开踊构型式 定位器作用型式 桎和方戏式 作用如式 工作晴忖例:EPP111i-Ai-As即表示该定位器为EPP系列电气阀门定位器,输入信号4-20mADG正作用、线性特性、气源压力为0.14〜0.16MPa、本安型。
四、技术规范度:小F全行程± 1%霞回小于全行程1%妊区:小于全行程0.4%4.特线件(可改变成快开、等百伶比特性〉3、气源巫力:OJ4-OA6Mpa 0.17- O.SMpa6, 最大流量:140NL伽忆(十气源压力ri:OJ4Mpa0j)7, 耗气量:5NL/min(^气源压力在O.L4MPa时)K.坏境隘度:-40匸3曲<:9、环境湿度;10~90%RHA10. 最大行稈速度:4mm/e>(rteZH B^2执行机构时)11, 输人阻抗:250境尹;4^20mADC)100Q(10^50mADC)12, 电气连&/C1/2螺绞13. 代管连擡:卡套式气管接头(0>6成①咅钢管)14、韋氐3-5ks费州援口”点羿整手轮图i EPPdlEP〉犁应位器外形阳曲2 FPP<HEP>刪电位器内部结构五、工作原理EPP<HEP定位器的工作是基于力平衡原理,如图3所示。
A 定位器说明书

ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
美国德赢 10 型电气-气动定位器使用说明书

K10Intrinsically Safe Electro-Pneumatic Positioner Operating ManualPneumatic ConnectionSingle Acting Actuator (Spring Return):For single acting actuators Outlet Port 2 is tobe plugged. Outlet Port 1 is to be piped to theactuator inlet port that acts against the spring.(Increasing signal causes pressure to increasein Outlet Port 1 of the positioner).Double Acting Actuator (Double Return):For double acting actuators Outlet Port 2 ispiped to drive the actuator towards the failposition. Outlet Port 1 is piped to drive theactuator away from the fail position. (Increas-ing signal causes pressure to increase in OutletPort 1 of the positioner and pressure todecrease in Outlet Port 2 of the positioner).Note: Air supply to the positioner must beclean, dry, oil free instrument air per ISA-S7.3.Maximum supply pressure is 120 psi. All pneumatic connections are 1/4” NPT. Electrical ConnectionThe electrical connection (4-20 mA Loop Input) to the K10 positioner is polarity sensi-tive. Connect the 4-20 mA Loop Input to ter-minal block J1 on the Connector Board as shown on the right (Positive lead to terminal point 3 and negative lead to terminal point 2). The wire size can range from 20 to 14 AWG.ConduitOpening4-20 mAInput (+)4-20 mAInput (-)Position Sensor Initial Angle (Setting Mode)The K10’s Position Sensor, which measures the absolute position of the valve, has a limited operating angle for proper position measurement. The Position Sensor must remain within the operating angle in both the open and fail valve positions. This is accomplished by initially setting the Position Sensor angle while the valve is in the fail position. The K10 has a mode of operation to accomplish the setting of this initial angle using the following steps.1. Apply loop current to the positioner and adjust to12 mA.2.Press & hold both the high and low buttons untilthe actuator is driven to span position. Release both buttons to remove air pressure from Outlet Port 1.3. If the valve fails clockwise and strokes counter-clockwise, then set switch SW1 to the CCW position. If the valve fails counter-clockwise and strokes clockwise, then set switch SW1 to the CW position (see figure to right).4.With no buttons pressed and the actuator in thefail position, push the Main Shaft Gear (larger of the two) down until it disengages from its shaft locking position.5.Rotate the Main Shaft Gear (both gears willturn), until only the green LED is flashing.Note: If the LED is already green, skip 5 and go to 6.6.Pull up the Main Shaft Gear allowing it to re-engage on the shaft locking it into position.7.Press and hold the High Calibration button untilthe valve fully strokes away from the fail position while watching the LED’s. The red or yellow LED’s must not light as long as the High Cal but-ton is being held down. If the red or yellow LED lights while the High Cal button is being held down, then the Position Sensor Orientation and Actuator air piping are out of phase. Correct the phase error by changing the position of SW1 and repeat this procedure starting from step 2.8.Release the High Calibration button and watch the red LED. The red LED will flash until the valve reaches the fail posi-tion.9.Press the Low Calibration button to exit the Position Sensor Setting Mode (if no buttons are pushed then this mode willtime out automatically in about 2 minutes).Main Shaft GearPosition SensorGearSwitch (SW1)CCWCWCalibrating The K10 PositionerOnce the K10 and actuator have been connected and the initial angle has been set. Low and High Calibration can be performed on the K10. Low Calibration refers to the input current value that drives the valve into the fail position. High Calibration refers to the input current value that drives the valve into the Span Position. Calibration adjusts parameters internal to the K10 that are specific to the actuator, and input current values. The parameters that are adjusted are, the Gain of the K10 servo loop. the end position (Zero/Span) of the valve travel, and Drop-Off point (input current level at which the transducer is forced to the extreme position, to insure that the valve is fully open or closed). The calibration routine uses the input current value to set it’s internal adjustment, so it is important that the input current does not change during the calibration routine.To Do a Low Calibration: (Zero Position)1.Set the Input Current level to the value that drives the valve into the fail position (typically 4 mA).2.Start the Low Calibration routine by pressing and holding the LOW CAL button on the K10 until the Yel-low LED flashes.3.Observe the flashing Yellow LED on the K10 which denotes the various stages of the calibration routine:a.) Flashing 1 time indicates Zero position set routine.b.) Flashing 2 times indicates Transducer Self Calibration routine.c.) Flashing 3 times indicates Gain setting routine.4.When the Green LED begins to flash the Calibration is completed. If the Red LED flashes this is an indica-tion that one of the Calibration routines could not be completed. The number of Red LED flashes indicates the calibration routine that failed.To Do a High Calibration: (Span Position)1.Set the Input Current level to the value that drives the valve into the span position (typically 20 mA).2.Start the High Calibration routine by pressing and holding the HIGH CAL button on the K10 until the Yel-low LED flashes.3.Observe the flashing Yellow LED on the K10 which denotes the various stages of the calibration routine:a.) Flashing 1 time indicates Span position set routine.b.) Flashing 2 times indicates Transducer Self Calibration routine.c.) Flashing 3 times indicates Gain setting routine.4.When the Green LED begins to flash the Calibration is completed. If the Red LED flashes this isan indication that one of the Calibration routines could not be completed. The number of Red LED flashes indicates the calibration routine that failed.Calibration Complete:******Note: For split range enter desired input values during low & high calibration.Advanced FunctionsThe K10 has the ability to change the calibration settings (Gain, Zero, Span, and Drop-Off) manually. This function was intended to make minor changes in the calibration values after doing the Low and High calibration. Some examples where this might be used are decreasing the Gain if the valve still shows some overshoot on rapid position changes, or increasing the High Drop-Off point so it will not be in effect at 20mA. Exercise caution if using the manual calibration, mis-adjustment of these settings on the K10 positioner can result in erratic behav-ior or failure of operation, and may require resetting the EEPROM before auto-calibration can be performed again.To Do a Manual Calibration Adjustment:Before performing a Manual Calibration Adjustment the positioner needs to be calibrated as described previ-ously.1.Apply Input Current to the K10.2.Start the Manual Calibration routine by pressing and holding the Function (center) button on the K10 untilthe Green and Yellow LED flashes.3.Observe the flashing Green and Yellow LED on the K10 which denotes the various stages of the manualcalibration routine, pressing the Function (center) button again advances to the next stage:a.) Flashing 2 time indicates Manual Gain adjustment.b.) Flashing 3 times indicates Low Drop-Off adjustment.c.) Flashing 4 times indicates Zero position adjustment.d.) Flashing 5 times indicates High Drop-Off adjustment.e.) Flashing 6 times indicates Span position adjustment.4. To alter any characteristics of the positioner follow the following steps:a.) Manual gain Increase the positioner gain by pressing and holding the High Cal button. Decrease thePositioner gain by pressing and holding the Low Cal button. The maximum adjust-ment has been achieved when the red LED lights.b.) Low Drop-Off Increase the mA input signal that the positioner drops output port 1 pressure by press-ing the High Cal button. Decrease the mA input signal that the positioner drops outputport 1 pressure by pressing the Low Cal button.c.) Zero position[To adjust the zero position to a point other than the hard stop of the valve the Lowcalibration of the positioner must have been performed at a current slightly lower thanthe zero position current. (Ex. If the zero position current is 4.0 mA the Low Calibra-tion as described in the previous section needs to be performed at 3.9 mA.)]Increase the zero position by pressing and holding the High Cal button. Decrease thezero position by pressing and holding the Low Cal button. Continue to increase ordecrease the zero position by repeatedly pressing and holding the buttons.d.) High Drop-off Decrease the mA input signal that the positioner drops output port 2 pressure bypressing and holding the Low Cal button. Increase the mA Input signal that the posi-tioner drops output port 2 pressure by pressing the High Cal button.e.) Span Position [To adjust the span position to a point other than the hard stop of the valve the Highcalibration of the positioner must have been performed at a current slightly higherthan the span position current. (Ex. If the span position current is 20.0 mA the Highcalibration as described in the previous section needs to be performed at 20.1 mA.)]Decrease the span position by pressing and holding the Low Cal button. Increase thespan position by pressing the High Cal button.5. The Input Current can be changed during the test to observe the adjustment effects on the K10 behavior.6. To save the adjustments and exit the Manual Calibration Mode the Function (center) button must be heldfor approximately 5 seconds (green and yellow flashing LED’s will change to flash just green when adjust-ments are saved) This procedure to save and exit can be performed from any stage during the Manual Cal-ibration.7. Pressing the Function (Center) button during the High Drop-Off adjustment exits the Manual CalibrationMode without saving any adjustments made.Dip SwitchesDip switch #1Off Position (Factory Setting) = Normal Acting (4 mA represents zero/Fail position and 20 mA repre-sents Span position).On Position = Reverse Acting (20 mA represents zero/Fail position and 4 mA represents Span posi-tion).Dip switch #2: NOT USED. Unit will operate with switch in either position.Dip Switch#1Dip Switch#2Dip Switches shown in factory set positionsCCWCWResetting the EEPROM Back to FactoryDefault ValuesThe positioner has an internal Electrically Erasable Programmable Read Only Memory (EEPROM)that is used to store the calibration values. These values remain in the EEPROM memory even if power is removed from the positioner. During normal operation of the positioner the EEPROM will not have to be reset. The memory may become corrupted if power to the positioner is lost while the positioner is writing to the EEPROM. which only happens at the very end of the calibration cycle or at the end of the Position Sensor Initial Angle setup. This memory can be reset back to factory default values by holding down the HIgh Cal button while the positioner is being powered up. After the EEPROM is reset, the positioner will have to be calibrated again.Reversing the 4mA and 20mA Positions (Reverse Acting)Normally 4mA of input current represents the closed valve position and 20mA represents the open valve position. The positioner has the option to switch this so 20mA represents the closed valve position and 4mA represents the open valve position. The normal mode is chosen by setting the positioner DIP Switch position 1 (the one closest to the LED’s) to the “OFF” position (toward the LED’s). The reverse acting mode is chosen by setting the positioner DIP switch position 1 to the “ON” position (away from the LED’s). The positioner should be calibrated again any time the switch position is changed.Setting the Switches1.Operate the actuator to one extreme. Choose the switch you would like to signal this position (upperor lower switch). Disengage the appropriate switch cam from the spline by pushing or pulling against the spring (push down for the upper switch, lift up for the lower switch).2.Turn the cam until the switch is activated. Activation of the switch can be monitored using a continuitytester or equivalent means.3. Release the cam allowing it to re-engage with the spline.4. Operate the actuator to the opposite extreme and repeat steps 1 through 3 for the other switch.Wiring SchematicTOP CAMPUSH DOWNTURN & RELEASEBOTTOM CAMLIFT UPTURN & RELEASETOP CAMPUSH DOWNTURN & RELEASESWITCH#1UPPERNCNOCBROWNPURPLEYELLOW123456REDBLUEORANGECNONCSWITCH#2LOWERGNDParts List1OptionalMechanical SwitchAssembly8*Item #Description1Housing Ass’y Qty 23456111111Shaft Ass’y Electronic Ass’y Transmitter (optional)Manifold Ass’y Motor Ass’y71Connector Board Ass’y81Mechanical Switch Ass’y (optional)*Void FM approval as Non-Incendive when ordered with 2-SPDT switch option .K10 product with optional switches is for use in general purpose applications only.6735241Technical DataInput Current 4 to 20 mA (Analog)Voltage Drop 9 voltsSupply Air Pressure (low) Resolution 0.5% of span Linearity ±1% of spanConduit 1 x 3/4” NPTEntriesHousing Engineered Resin (Nylon)Cover Clear Engineered Resin (Nylon)Shaft Stainless Steel Fasteners Stainless Steel HiVue Copolyester Electrical Version SPDT form CElectrical Rating15 Amps @ 125/250 VAC 10 Amps @ 24 VDC 0.5 Amps @ 125 VDC 0.25 Amps @ 250 VDC(high) 15 to 45 psi40 to 120 psi Hysteresis 0.4% of span Repeatability 0.4% of span Thermal Coefficient 3%/100°COutput Flow Rates 8.0 scfm @ 25 psi (226.5 liter/min) 16.2 scfm @ 90 psi (458.7 liter/min) Air Consumption .003 scfm @ 25 psi (.08 liter/min) .008 scfm @ 90 psi (.23 liter/min) Operating Temp. Range -40°C to 85°C (-40°F to 185°F) GainElectrically Adjustable Air Connection Ports1/4” NPTModMountEngineered Resin (Nylon)Manifold Anodized Aluminum F MAPPROVEDNon-IncendiveClass I, Div 2 Grps A,B,C,D Class II, Div 2 Grps F ,G Class III, Div 2*Void FM approval as Non-Incendive when ordered with 2-SPDT switch option .K10 product with optional switches is for use in general purpose applications only.***DimensionsAppendix AElectro-Pneumatic Positioner Transmitter Calibration Procedure1.Calibrate the Positioner per the operating manual provided with the product.2. Stroke the valve to the fully clockwise extreme.3.Depress the main shaft gear disengaging it from its locking position, take extreme care Not to Turn the main shaftgear, as this will take the positioner out of calibration.4.With the main shaft gear depressed turn the transmitter gear to the fully counter clockwise position, and note thereading (mA) of the transmitter. Next, turn the transmitter gear clockwise until the transmitter changes no more then 0.5 mA from previous reading.5.Turn the clockwise mA adjustment screw to adjust the transmitter reading to the desired output for this valve posi-tion (typically this is 4 mA or 20 mA).6.Stroke the valve to the fully counter clockwise extreme.7.Turn the counter clockwise mA adjustment screw to adjust the transmitter reading to the desired output for thisvalve position. 8.Stroke the valve between the full clockwise and counter-clockwise positions checking and readjusting the (mA) out-put as necessary.Main ShaftMain Shaft Gear mA Adjustment Screw Transmitter GearmA Adjustment Transmitter {OutputTerminals 1 & 2(Not Polarity Dependent)for clockwise positionScrew for counter-clockwise positionCWCCWCCWCW。
AEP300智能阀门定位器作业指导书

AEP300系列智能阀门定位器作业指导书
一:目的
帮助和指导班组有效的处理AEP300 系列智能阀门定位器的故障,对存在的危险进行分析,采取相应的安全预防措施,确保作业安全和质量。
二:适应范围
各装置的AEP300 系列智能阀门定位器的故障处理
三:采用标准
四:工作原理
AEP300系列智能阀门定位器是从控制器或控制系统接受4-20mA的电流信号,通过高性能的单片机的处理,可精确控制阀门开度﹑进行自动设定及PID最佳控制.它附带有阀门反馈﹑HART通讯等强大的功能.
六:常见故障分析判断处理
七:使用的工具和劳保要求
使用工具:个人工具万用表
劳保要求:工作服安全帽护目镜手套必要时氧气呼吸器安全带。
EPC380模块式智能阀门定位器使用说明书
EPC380模块式智能阀门定位器使用说明书1. 使用范围·适用执行器:供电电压380V±15%(AC), 与功率单元配套(接触器)控制开、关、停的电机。
·工作环境:环境温度:-20℃~75℃。
相对湿度:小于90%。
2.输入信号·调节输入信号:4~20mA(DC),输入负载阻抗小于150Ω。
·开度输入信号:电位器信号,500Ω~5KΩ。
3.输出信号·阀门位置反馈输出信号:4~20mA (DC,隔离),输出带负载能力不小于500Ω。
·开关控制信号:可控硅输出。
4.控制精度·灵敏度:在自动位置,灵敏度设定为自动调整方式另可手动设置灵敏度位置, 0.5%、1%、1.5%、2%、2.5%、3%、4%、5%共8挡。
5. 操作说明·标定:在手动位置,灯灭。
点动“开阀”键,电动阀门开向运行直至到开限位开关停止,此过程指示灯(红)慢闪烁,点动“关阀”键灯灭。
按住“开阀”键不松开5秒,阀全开指示灯(红)快闪烁以示确认,确认该位置为全开(满度)位置,抬起“开阀”键,满度标定过程结束。
此时指示灯(红)常亮。
点动“关阀”键,电动阀门关向运行直至到关限位开关停止,此过程指示灯(绿)慢闪烁,点动“开阀”键灯灭。
按住“关阀”键不松开5秒,阀全关指示灯(绿)快闪烁以示确认,确认该位置为全关(零点)位置,抬起“关阀”键,零点标定过程结束。
此时指示灯(绿)常亮。
·设置灵敏度位置:在自动位置,灵敏度设定为自动调整方式后,ΔP提前量值将由模块对目标自动计算得出并及时调整。
最终震荡次数不大于3次。
在手动设置灵敏度位置,ΔP提前量值将由模块对目标自动计算得出并及时调整。
灵敏度为手动设定值,最终震荡次数不大于3次。
当装置发生震荡时,手拨旋钮放大灵敏度到合适的档位。
ΔP:定义为电动阀门的控制误差,产生于电动阀门的电动装置的机械误差和电动装置电机断电后电动装置的惰走。
AEP定位器说明书

AEP系列智能阀门定位器使用说明书一 . 产品简介AEP系列智能阀门定位器是从控制器或控制系统接受4ͨ¹ý¸ßÐÔÄܵ¥Æ¬»ú´¦Àíºó½øÐÐ×Ô¶¯É趨²¢ÊµÏÖPID最佳控制HART通讯等强大的功能二 . 主要特征和功能我公司开发生产的AEP系列智能定位器也考虑了现场使用的稳定性1.产品外部装有液晶显示2.抗振性强3.工作时气源压力的变化不会影响产品的性能5.结构精小6.耗气量小经济性好8.5V因此对于控制系统几乎没限制可以获得阀门和定位器的各种工作参数HART通讯是可选项可以确认阀门的开度阀位输出是可选项ÏßÐÔ11.用户可根据控制要求设定16个点来实现特殊的输出特性14.在现场不用其它设备15.通过手动开关16.可进行41217.通过手动调整可设定零点和量程18.通过手动运行功能方便确认阀门的正常与否因此很容易检测错误状态21.不需要其它配件22.选用耐腐蚀性强的环氧聚酯进行电喷处理23.内部结构非常简单从而减少了故障的机率三 . 主要技术参数项目直行程角行程20mADC最低电流信号 3.2mA(标准型)7kgf/cm20.7MPa150mm090/20mA DC 气源接口Rc1/4, NPT1/4压力表接口Rc1/8, NPT1/8电源接口G1/2(标准型)可选项800.5F.S.灵敏度F.S.重复性0.3ÊäÈëѹÁ¦Îª1.4 kgf/cm2时3LPM以下工作温度 -10输出特性线性等百分比可设定16点95RH(40选项选项20mA(DC 10ExiaBT6+H 3.3ib相对湿度65四 . 型号分类及订货代码AEPCV3000Ecotrol20100五 . 内部结构AEP直行程智能定位器内部结构如下图所示Ä£¿é»¯µÄÉè¼Æ六 .安装1.外形尺寸图2. 机械连接与执行机构连接示意图l有管路连接(侧连)AEP300LS和执行机构连接示意图 AEP300L D和执行机构连接示意图AEP300RS和执行机构连接示意图 AEPl连接端子前请确认电源是否切断带阀位输出除外20mA直流电源标准型3.2mA最大电流不得超过24mAÐèÏò·§Î»Êä³öÄ£¿éÌṩ9×î´ó²»³¬¹ý30V²úÆ·ÄÚÇë²»ÒªÔÚ¸ßÈÝÁ¿µç»úµÈ²úÆ·¸½½ü°²×°µçÀÂa. 电流输入信号端子的连接l拧开AEP外壳上面的4个M4螺丝l拧开固定输入电流信号接线端子的螺丝l把信号线按照正负极正确连接(注意正负极并拧紧固定螺丝即可打开l通过AEP的接线导管引入信号线以免接错)c. 接地端子的连接l为了AEP和系统的安全l接地线可连接在接线柱上的中央端子或接线导管旁边的外部端子上l拧开AEP外壳上面的4个M4螺丝七 . 基本功能操作1 .自动/手动开关AEP系列智能定位器有自动/手动开关按AEP的动作要求当开关设为手动时直接输入执行机构有可能发生振动使用一字螺丝刀适当的调整可调节型节流孔就可以解决振动问题本操作会使阀门和执行机构动作请务必将阀门从整个系统中隔离开4.正常模式的说明向AEP智能定位器输入4¹ý6秒钟后正常动作模式此画面中下行文字RNU表示目前AEP正接受外部4ÕâÖÖÓÐRUN显示模式叫做RUNģʽ¸Ä±äÊäÈëÐźÅRUN模式由下列6种构成RUN PV阀门行程RUN SV%输入信号1004DigitRUN VeL当前阀门的速度如要改变显示画面ESCUPÿµã»÷Ò»´Î°´×¡键后DOWNÔò·´·½ÏòÒÀ´Î±ä»¯ESC RUN按钮分类中文名称功能确定键更改参数后保存ESC´Óµ±Ç°²Ëµ¥ÍË»ØÒ»¼¶(UP)向上键在当前菜单内更改参数(DOWN)向下键在当前菜单内更改参数八. 自动设定模式AEP智能定位器有AUTO1AUTO3V-0等5种自动设定模式AUTO2自动设定的5种类型和设定内容参数如下表〇〇〇AUTO2〇〇〇〇〇〇AUTO3〇〇〇〇BIAS1. 自动设定1当阀门厂已设定好AEP参数安装到现场后步骤如下在正常模式下ENTERÒº¾§»áÉÁ˸²¢³öÏÖAUTO CAL字样在AUTO CAL状态下ENTERÒº¾§ÉϳöÏÖAOTU1在AOTU1模式ENTERÔò½øÐÐAOTU1自动设定当AOTU1自动设定结束后并显示当前阀门开度按键6秒ENTER按键30.0%RUN PVAUTOCAL¶ÔËùÓòÎÊý½øÐÐÉ趨ʱѡÓÃAUTO220mA 电流约6秒后531数字6秒后出现如下图的信息:ͼÖÐÏÔʾµÄ±íʾ·§ÃÅ¿ª¶ÈµÄÊý×ÖÓпÉÄܲ»Í¬ENTERÔò½øÈëAUTO1显示模式按键点击一次键这时根据自动设定步骤一般在AUTO2模式的自动设定需要3µ«¸ù¾ÝÖ´Ðлú¹¹µÄ´óСºÍÆäËüÒòËØ×Ô¶¯É趨Íê³ÉµÄʱ¼ä»áÓÐËù²»Í¬ 自动设定结束后约过4秒后自动回到RUN模式AEP 的零点PID 参数ENTER按键DOWN按键4秒自动返回模式3 .自动设定3如果要自动初始化所用参数则可以选用AOTU3设定步骤相同在AUTO1模式DOWN Ôò½øÈëAUTO3模式 在AUTO3模式ENTERÔò½øÐÐAUTO3自动设定AUTO3自动设定结束过程跟上述AUTO1相同这个值受到输入空气压力如果改变输入AUTO1AUTO2空气压力值或KP值如果这个值没有正确调准步骤如下顺序和上述AUTO3自动设定步骤的DOWNÔò½øÈëBIAS模式在BIAS模式按键5. 速度感应自动设定速度感应自动设定能准确确定阀门动作速度那么KI调节明显变慢如果这个值正常ESC对准RUN VeL 时一般情况下2范围内那么重新调整V ²½ÖèÈçÏÂ顺序和上述BIAS 自动设定步骤的DOWNÔò½øÈëV-0模式在V-0模式按键九 .手动模式AEP 系列智能阀门定位器还可以根据现场的情况进行手动设定按住键6秒再按一次键ENTER Ôò½øÈëMANUAL 调整模式上行文字表示阀门开度百分比下行жMA 表示正在运行MANUAL 模式 按键或键可使阀门运动阀杆会向上运行;按键如果想加快阀门动作速度UPDOWNENTER按键阀杆慢慢向上运动同时按ENTERDOWNDOWN键阀杆快速向下运动表按键6秒DOWN按键UPDOWN°´键HAND CALÄÇô¾ÍµÃÖØÐÂÉ趨ÁãµãºÍÁ¿³Ì·§Ãźͷ§Î»·´À¡Êä³öÒ²MANU AL30.0%жMR 300 25.0%жMR 243重新设定)和量程在RUN 模式按住键6秒再按3次键ENTER½øÈëµ÷ÕûÁãµãµÄPV-ZERO 显示模式在PV-ZERO 模式下按键阀杆开始向零点移动UP DOWN ÉÏϵ÷Õû·§¸Ë°´键保存零点设定则按2次即可按键移动到调整量程的PV-END 显示模式 按键进入жPE 量程调节模式液晶上行显示阀门开度100下方显示жPE 和行程终点的内部数值 按或键量程到达所需位置后ENTERÕâʱҺ¾§ÏÔʾ+PE 字样按(ESC)键返回PV-END显示模式返回RUN 显示模式在PV-END 显示模式按键按3次键ENTER按键UPDOWNENTER按键DOWN按键UPDOWN按 ESCAUROCAL30.0%RUN PVb. 阀位输出信号零点和量程的设定当改变阀门的零点和量程后如果要得到非常精密的输出信号可以手动进行调整在PV-END 模式按住键ENTER Òº¾§ÏÔʾ§ØR-ZERO 模式这时可调整反馈信号的零点按或使这个值达到4mA 后ENTERÕâʱÏÔʾ+TR-ZERO 字样按(ESC)键退回+TR-END 按键移动到TR-END 显示模式ESCENTER ·§¸ËÏòÖÕµãÒƶ¯²¢¿Éµ÷½Ú·´À¡ÐźÅÁ¿³Ì 按或键按键保存按2次(ESC)键按键ENTER按键或ENTER按键ENTER按或键ESC按2次键250TR- 30.0%RUN2072PV-十. 参数分类及参数值的调节方法阀门执进行自动设定但是有些特殊阀门或在特殊的条件下即有可能发生振动或漂移现象就可解决问题dEAdZONE P调节KI D调节共4种构成死区(dEAdZONE) 因阀杆摩擦力很大而发生振动或漂移等问题KP °´ÊäÈëÐźŴﵽÏàӦλÖõÄËٶȱä¿ìµ±P值过小但会降低动作精度I调节值 I值过大相反过小KDÈÝÒ×·¢ÉúÕñ¶¯Ó°Ïìµ½´ï׼ȷλÖõÄ同特性在RUN模式按住键6秒钟DOWNÔò³öÏÖPARAM字样ENTERÔò½øÐÐdEAdZONE自动设定在dEAdZONE显示模式时按键并显示жEAdZONE字样利用或键可改变dEAdZONE值立即适用于当前动作一边确认动作状况按键进行保存表示已经保存Í˳ödEAdZONE显示模式再按(ESC)键按键6秒钟DOWN按键ENTER按键或 ENTER按3次键KP°´键ENTER½øÈëKP调整模式UP DOWN¸ü¸ÄÉ趨ºóÒò´ËÒ»±ßµ÷ÕûÊäÈëµçÁ÷ÖµÕÒµ½×î¼ÑÉ趨ֵ确定设定值后ENTERÒº¾§ÉÏ»áÏÔʾ+KP字样退出KP显示模式按(ESC)键返回PARAM模式即可返回RUN模式ENTER按2次键ENTER按键ENTER按键或ENTER按3次键键调整KIPARAM5.0%dEAdZO2.0%+EAdZO30.0%RUN PVPARAM5.0%dEAdZO30.0%ЖKP 1030.0%KP 5DOWN½øÈëKI显示模式液晶屏显示KI字样在 KI 显示模式按键液晶屏显示+KI字样利用或键可改变KI值立即适用于当前动作一边确认动作状况按键进行保存表示已经保存按(ESC)键按(ESC)键按键6秒DOWN按键DOWN 按键UP按键ESCDOWNKDDOWN½øÈëKD显示模式液晶屏显示KD字样在 KD 显示模式按键液晶屏显示жKD字样利用或键可改变KD值立即适用于当前动作一边确认动作状况一边运行阀门按键进行保存表示已经保存按(ESC)键按(ESC)键30.0%RUN PVAUTOCAL30.0%+KI1430.0%RUNPVPARAM5.0%dEAdZOENTER按2次键ENTER按键ENTER按键或ENTER按3次键键调整返回RUN模式十一.阀门工作模式1. 阀门模式a.动作模式DARAb.流量特性模式通常有线性快开USER SET根据用户需求d. 紧密开放可紧密开放阀门TSHUT CL当外部输入信号达到4mA 左右的设定值时f. 段幅控制20mA12 mA20mA范围内进行全程段幅控制在RUN模式按住键6秒在按4次键移动到VALVE 模式ENTER按进入жACT RA调整模式按或键按键保存返回RUN 模式30.0%Kd 530.0%+Kd1130.0%RUNPVDOWN 按键ENTER按(UP)或键调整后按键ESC返回RUN 模式b. 流量特性模式变更ENTER当反作用时DOWN ENTER ³öÏÖ§¨HAR LIN ,并可调整流量特性模式按或键如EQ°´键保存流量特性按3次(ESC)键ENTER按键ENTER按(UP)或键调整后按键ESC返回RUN 模式c. 用户自定义特性模式的变更ENTER当反作用时DOWN ENTER³öÏÖ§ØPO SET 模式液晶上行显示的数字是PO 设定的阀门开度百分比 按或键P0值保存后自动显示жP1 SET 模式调整方法跟жPO SET 相同相同方法设定P2到P15的阀门开度百分比值后保存按保存以上操作完成16个点的设定+RCT dRЖRCT30.0%RUN PVVALVEENTER按2次ENTER(UP)或键调整ENTER设定PI 的值P5值ENTER按3次d.完全开放模式的调整ENTER当反作用时DOWNENTER ³öÏÖ§ØSHUT OP 模式, 可设定全开的起始点开度 按或键按键保存返回RUN 模式当TSHUT OP 值为100ENTER 按3次键 ENTER 按或键调整后按键ESC返回RUN 模式e. 完全紧闭模式的调整ENTER当反作用时DOWNENTER ³öÏÖ§ØSHUT CL 模式, 可设定全开的起始点按或键按键保存返回RUN 模式VALVE RCTRA+SERSET100.0%ЖP15SET30.0%RUN95.0%ЖSHUT注时表示解除这个功能按键DOWN按键UPDOWN ENTER按3次键SPLIT在VALVE 模式按住键, 进入ACT RAÏÔʾģʽ按5次键标准输入信号设定为4ENTER ³öÏÖ§ØSPLIT调整模式UPDOWN°´键保存返回RUN 模式按键DOWN按键UPDOWN ENTER按3次键30.0%ЖPI0.5%ЖSHUT RCTRA4.20%SPLIT0.3%TSUT CL十二 .查看模式这个模式给用户提供多种信息DOWNENTER½øÈë¿É»ñµÃAEP 很多信息的模式按或键按(ESC)返回VIEW 模式按(ESC)键返回RUN 模式按5次键ENTER 按或键ESC返回RUN 模式项目内容AEP300产品的型号标记VERSION主程序软件的版本VIEWAEP30HART V HART协议的版本POL AddR在HART协议使用的频道地址BIAS VI内部变量中进行马达控制所必要的BIAS值跟用户无关当打开或关闭电源时所用的时间未满1分钟时不计FULL-OP阀门全开时间的总时间FULL-CL阀门全关时间的总时间VM NOR液晶上阀门开度的显示方式有百分比和数字2种显示方式这是生产厂家利用的值在查看模式可确认的项目和内容十三 .错误警告代码当AEP使用中出现异常时确认错误警告代码对应的内容后1. 错误代码出现这个代码时AEP不可控制2. 警告代码出现这个代码时AEP300可以控制对应代码B,F,G,H项反馈杆使用角度太小增加反馈杆回转角度后以上的错误持续1分钟以上阀杆摩擦力太大气源输入压力进行BIAS自动设定D I值接近最大或最小- 阀门摩擦力发生变化- 气源输入压力发生变化气源输入压力调整为正常范围内的压力进行BIAS自动设定E未定未定F全开表: 错误代码和相关措施十四 . 主程序软件导航图。
APRS GPS 个人卫星定位追踪器 说明书
GPS个人卫星定位追踪器型号:LM-200G使用说明书本手册对追踪器的安装和使用进行了较为详尽的说明,希望在使用前详细阅读本手册,并按照说明正确使用,阅读后请妥善保存,以备不时之需。
安全注意事项●当禁止使用无线设备或使用时会引起干扰或危险时,请不要使用本机●请避免在温度过高或过低、潮湿、灰尘过多的地方使用●请勿将水杯、化妆品、药品、盛水容器和重物放置在本机上●请避免本产品接触到水或化学药品,擦拭时请用干布●不要私自拆卸,修理和改造,出现问题请和当地代理商或厂家联系●SIM槽内或产品内部进入杂质可能会引起运行错误或故障●不要在本品上方放置任何磁铁或金属的物体,否则会影响信号接收注意: GPS接收器必需接收3颗或以上卫星才能可靠定位,如在室内、地下停车场、岩洞、隧道等地方是有可能无法接收卫星信号,这并不是本产品出现问题,请尽量在看见天空的地方使用本产品。
主要功能和特点●全球位置追踪功能本品内置GPS卫星定位模组,完全免费接收美国GPS定位系统信号,实现全球定位监控追踪。
●远程监控功能本产品只要有效地接收GPS卫星信号就能通过手机短信或GPRS网络发送被监控人的位置,发送时间间隔自由设定,并有轨迹保存,可以随时查询轨迹路线。
●监听功能当你想了解被监护人去了那里,在什么环境时,可以启动监听功能,监听范围有5米以上。
●求救功能当携带追踪器的老人、儿童或被监护人遇到紧急情况时,只需按下求救按钮,追踪器就会发送一条带中文位置说明短信到你预先绑定的手机上报警,争取宝贵时间来进行救援,特别适用老人和儿童。
●双向通话功能被监护人需要和监护人通话时,只需按一下追踪器的电话按键就能随时通话。
●防盗功能当有贵重物品或车辆临时需要监控时,可以把本产品长期通电运行,24小时处于监控状态,即使被盗也可以把物品找回来。
●内置全国地名数据本品内置详细全国地名数据,用户查询被监控人位置时可以通过短信读取地址,并回复到机主手机,无需上网查询,可以完全不依赖任何平台支持,操作非常方便。
电动气动定位器 5951 00-5951 06 安装、操作和维护手册说明书

INSTALLATION, OPERATION AND MAINTENANCE MANUALElectro-Pneumatic Positionerfor Rotary Actuators GENEBRE Ref: 5951 00 – 5951 04 – 5951 06INSTALLATION, OPERATION AND MAINTENANCE INSTRUCTIONS1. Product Description. (3)2. Data and Technical Features (3)3. Security Instructions (4)4. Transport and Storage Conditions (5)5. Preliminary Checks (5)6. Positioner Installation (5)6.1 Installation of the Support and the Positioner on the actuator (5)6.2 Mounting of the Cam (6)6.3 Air Connection. (7)6.4 Electrical Connection (transmission signal). (8)7. Exploded view (9)8. Starting Up (Settings) (9)8.1 Zero Setting (9)8.2 Span Setting (10)8.3 Auto / Manual Switch (10)8.4 Seat Adjustment (11)8.5 Air throttle in pilot valve (11)8.6 Transmitter regulation (article 5951 04 only) (12)9. Maintenance (13)10. Cleaning the A / M Switch (14)11. Safety Instructions (14)1. Product Description.The electro-pneumatic positioner is used for rotating operation of valves with pneumatic actuators by means of an electric controller or a control system with an analogical output signal of 4 – 20 mA.It can be used with double effect or single effect actuators. Easy setting of zero and of the trajectory. Easy switching of direction (clockwise / counter-clockwise).Low air consumption and easy connection to air ducts.2. Data and Technical FeaturesDescription ValuesInput signal 4 – 20 mAImpedance250 ±15ΩSupply pressure 1.4 ~ 7 bar (20 ~ 100psi)Stroke 0 - 90°Air connection G 1/4”Gauge connection G 1/8”Protection IP66 (5951 00/04) IP65 (5951 06)Ambient temperature -20°C ~ 70°CLinearity ± 1,5 % F.S. (Full Scale)Hysteresis ± 1,5 % F.S. (Full Scale)Sensitivity ± 0.4 % F.S. (Full Scale) Air consumption 3 LPM (Sup = 1.4 bar, 20psi) Flow capacity 80 LPM (Sup =1.4 bar, 20psi) Material Aluminum AlloyWeight 2,7 Kg.Technical Features - Transmitter (Art. 5951 04)Connection type 2 wireOutput signal 4 – 20 mA DCImpedance 0 – 600 OhmPower supply voltage 15 – 30V DCNoise range 50m V ppTemperature range -20ºC / 60ºC ( -4 / 140ºF)Linearity +- 1% F.SHysteresis +- 0.2 F.SSensitivity +- 0.2% F.S3. Security InstructionsThe goal of this manual is to allow users with technical skills to install, turn on, operate and inspect Genebre’s electro-pneumatic positioners. Qualified personnel must be familiar with all notices and warnings described in these instructions. Not complying with these notices and warnings may cause serious personal injury and material damages.Certain parts of the positioner are subject to mechanical movementwhich may cause injury.Work on the system or electric equipment must only be performed byqualified technicians or by trained personnel under the control andmonitoring of said technicians, according to the security rules andguidelines, as well as other applicable national laws.Negligent use may cause serious damage to the parts, installation andpeople, as well as to the equipment itself. Under no circumstance canany part or component of the positioner be modified or altered. Suchalterations or modifications automatically invalidate the designed useof the positioner.4. Transport and Storage Conditions•The positioners are shipped from the Genebre, S.A. headquarters in appropriate packaging to prevent damage.•Any slings, ropes or chains used to lift or transport motorized valves must NOT be attached to the positioner under any circumstances.•The positioner’s supports are designed to withstand the action efforts but NOT the total weight of the valve, or any other type of burden or effort.•Do NOT bang the positioner against walls, floors or other machines. That could cause severe damage to the positioner or its parts.•Store in a dry and well-ventilated place, safe from bad weather conditions.Avoid placing them straight on the floor. Use pallets, shelves o wood bases.•Genebre, S.A. recommends to visually examine the possible damages suffered during transportation and storage. Visual inspection must include the interior ofcompartments.5. Preliminary Checks•Verify that the characteristics of the positioner match those required before proceeding to install and turn on the device. That data can be found in the dataplate.•Should there be any deviation or non-conformance, please contact Genebre, S.A.Make sure the supply air to be used is Dry, Clean and Filtered, sincebad quality supply air may seriously damage the positioner.•Maximum pressure of air supply 7 kgf/cm² (100 psi)6. Positioner Installation6.1 Installation of the Support and the Positioner on the actuator•Connection to the fixing of the output shaft in which the position of the positioner’s output shaft and the main shaft of the rotating actuator areconcentric. Type C connection (see figure) is Namur, direct connection to theactuator.•The positioner’s support is designed to be mounted on actuators with a shaft height of H=20 or H=30, as well as fixing holes at 80 mm or 130 mm accordingto Namur regulations.6.2 Mounting of the CamAttention: Do not supply air to the equipment during this operation. Itmay be highly dangerous.Note: The positioner leaves the factory with the cam mounted on the shaft and the indicator plate in the position “RA” (counter-clockwise/reverse acting).In case you need to switch the direction (clockwise/direct acting) proceed as follows: •Lift the cover of the positioner.•Remove the clamping screw from the indicator plate and remove the plate.•Remove the clamping nut from the cam.•Remove the cam and turn with the side marked as “DA” facing up.•Mount the cam on the ledge of the output shaft.•Set the actuator on the initial position.•Fix the cam using the upper nut so that the reference line “0” is tangent to the bearing.•Once the cam is mounted, place and fix the indicator plate to the main shaft using the M3 screw so that the reference lines for the cam and the indicator match up. 6.3 Air Connection.Attention: Make sure the supply air to be used is Dry, Clean andFiltered.1. Use a regulator with a filter to constantly maintain the supply air pressure (optimum supply pressure of 6 bar to operate the actuator).2. Purge the air circuit completely to avoid strange particles.3. In applications with single effect actuator (spring return) close output OUT1 or OUT2 as appropriate.6.4 Electrical Connection (transmission signal).Connect the power-supply terminals (+) and (-) to input terminals (+) and (-) of the positioner or transmitter, accordingly.Art. 5951 00Art. 5951 04 Art. 5951 06Detail of connection to the transmitter Art. 5951 04Once you are finished connecting, replace the cover and close using the screws.Adjust button+ -Confirmation buttonInput 4 – 20 mA-Output 4 – 20 mAat 24VDC++-For the Output wiring instruction art. 5951 06 you should consult the technical data sheet of the limit switch box art. 5987.7. Breakdown view8. Starting Up (Settings)Note: The positioner leaves the factory set to position 0º and path 90º. In case you need to establish these settings, proceed as follows.8.1 Zero Setting•Send a run start signal (4 mA).•Turn the ZERO setting wheel clockwise or counter-clockwise until the reference lines of the indicator cam and the tangent point of the bearing match.ZERO•In the case of the single effect actuator, check that it is set to zero point at standard pressure. Otherwise, repeat Zero Setting.8.2 Span Setting•Set the span so that the actuator stops at position 0% in the run with an input signal of 0% (4 mA), and so that it stops at position 100% with an input signal of 100% (20 mA), respectively.•Check Zero point and repeat the Span setting as many times as required.•Once the equipment is set, tighten the Locking screw.8.3 Auto / Manual SwitchThis switch is used to switch between Auto and Manual modes. The equipment leaves the factory in Auto mode. To switch to Manual mode, turn the A/M regulator counter-clockwise.In Manual mode, the network pressure connects directly to the actuator. Return to Auto mode after using.This option does not apply to the single effect actuator connected to output OUT2.8.4 Seat AdjustmentAttention: This adjustment is done in the factory so it is notnecessary to readjust later.ATTENTION! This adjustment must only be performed by qualifiedtechnicians. Otherwise the equipment might completely lose itsconfiguration.•In case of very low sensitivity due to the actuator working at its maximum load limit, turn the Seat Adjuster clockwise. If the equipment keeps oscillating, turn counter-clockwise until balance is achieved. Be careful not to loosen the Lock Screw since it might come off the Seat Adjuster.•In case of oscillation due to mounting with a low air capacity actuator, refer to section 8.5.8.5 Air throttle in pilot valveIn case of low air capacity actuators, there could be oscillation in the equipment, rendering it inoperative. In such a case, use air throttles in outputs OUT1 and OUT2 of the pilot valve. There are two available measures that come with the equipment:Actuator Volume Output Orifice DiameterSmaller than 90 cm3 Ø 0,7Between 90 ~ 180 cm3 Ø 1,0Bigger than 180 cm3 None•Remove the pilot valve.•Remove the o-ring, place the throttle and insert the o-ring again. Be careful not to leave any foreign bodies in the orifice of the throttle.•Perform the same operation on both air outputs (OUT 1 and OUT 2).•Replace the pilot valve.If the oscillation persists after performing this operation, please contact Genebre S.A.8.6 Transmitter regulation (article 5951 04 only)If necessary, the transmission settings should be set so that the output signal settings match the settings of the signal sent (4 / 20 mA).8.6.1 Connect 24VDC power source, series connect amperemeter convenient for observing the feedcack signal’s current value.Observe the value of the amperemeterr: it must be between 4mA and 20 mA.8.6.2 Press the "enter" button until the indicator light comes on, release the “enter” button and the indicator light flashes indicating that regulation begins.Observe the aperemeter value: the value should be 4 mA, if there is deviation, can press the “+” button or “-“ button, adjust the current value.8.6.3 Feedback signal 0% (4 mA) position adjustingThe valve locate in original 0% (4 mA) position. Press t he “+”button or “-“button , adjust the current value, then press the “enter” button.Observe the amperemeter value: if the amperemeter value jump from 4 mA to 8 mA around, means the feedback signal 0% (4 mA) position confirmed. Module waiting for the feedback signal 25% (8 mA) position confirm.8.6.4 Feedback signal 25% (8 mA) position adjustingThe valve locate in feedback 25% (8 mA) position. Press the “+” button or “-“button , adjust the current value, then press the “enter” button.Observe the amperemeter value: if the amperemeter value jump from 8 mA to 12 mA around, means the feedback signal 25% (8 mA) position confirmed. Module waiting for the feedback signal 50% (12 mA) position confirm.8.6.5 Feedback signal 50% (12 mA) position adjustingThe valve locate in feedback 50% (12 mA) posit ion. Press the “+” button or “-“button , adjust the current value, then press the “enter” button.Observe the amperemeter value: if the amperemeter value jump from 12 mA to 16 mA around, means the feedback signal 50% (12 mA) position confirmed. Module waiting for the feedback signal 75% (16 mA) position confirm.8.6.6 Feedback signal 75% (16 mA) position adjustingThe valve locate in feedback 75% (16 mA) posit ion. Press the “+” button or “-“button , adjust the current value, then press the “enter” button.Observe the amperemeter value: if the amperemeter value jump from 16 mA to 20 mA around, means the feedback signal 75% (16 mA) position confirmed. Module waiting for the feedback signal 100% (20 mA) position confirm.8.6.7 Feedback signal 100% (20 mA) position adjustingThe valve locate in feedback 100% (20 mA) position. Press the “+” button or “-“button , adjust the current value, then press the “enter” button.Observe the amperemeter value: the amperemeter value should be reduce at first, after the value stable, it will comeback to 20mA, at the same time, the indicator light on module will flash some times.After finished step 8.6.7, the module automatic enter normal run state9. MaintenanceEven though this equipment requires no maintenance, it is recommended to carry out regular inspections, which must include:•Verifying the mounting / alignment of the actuator and the positioner.•Verifying the electrical connection of the signal.•Making sure all bolts are present and tightened.•Verifying the state of the filters of the air installation to ensure that good quality air reaches the equipment.10. Cleaning the A / M SwitchWhenever the positioner does not respond correctly to the input signals, proceed as described below:•Turn off any air or power supply.•Remove the A/M Switch regulator from the pilot valve.•Insert the wire (included in the inner part of the cover) through the air flow hole located on the A/M regulator to remove any particles that might be left inside.Cleaning the A/M Switch •Finally, clean the A/M Switch regulator using air and place it back in the enclosure.Do not forget to use the Lock Screw.•The equipment is ready for operation.Note: In the event that the positioner does not respond, proceed to change the pilot valve (Ref.P5951).11. Safety InstructionsWhen operating any kind of element, you must follow the security instructions and it is recommended to use personal protection gadgets:1) Protect your eyes.2) Wear gloves and appropriate working clothes.3) Wear safety footwear.4) Wear a helmet.5) Have running water at hand.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AEP系列智能阀门定位器使用说明书一 . 产品简介AEP系列智能阀门定位器是从控制器或控制系统接受4ͨ¹ý¸ßÐÔÄܵ¥Æ¬»ú´¦Àíºó½øÐÐ×Ô¶¯É趨²¢ÊµÏÖPID最佳控制HART通讯等强大的功能二 . 主要特征和功能我公司开发生产的AEP系列智能定位器也考虑了现场使用的稳定性1.产品外部装有液晶显示2.抗振性强3.工作时气源压力的变化不会影响产品的性能5.结构精小6.耗气量小经济性好8.5V因此对于控制系统几乎没限制可以获得阀门和定位器的各种工作参数HART通讯是可选项可以确认阀门的开度阀位输出是可选项ÏßÐÔ11.用户可根据控制要求设定16个点来实现特殊的输出特性14.在现场不用其它设备15.通过手动开关16.可进行41217.通过手动调整可设定零点和量程18.通过手动运行功能方便确认阀门的正常与否因此很容易检测错误状态21.不需要其它配件22.选用耐腐蚀性强的环氧聚酯进行电喷处理23.内部结构非常简单从而减少了故障的机率三 . 主要技术参数项目直行程角行程20mADC最低电流信号 3.2mA(标准型)7kgf/cm20.7MPa150mm090/20mA DC 气源接口Rc1/4, NPT1/4压力表接口Rc1/8, NPT1/8电源接口G1/2(标准型)可选项800.5F.S.灵敏度F.S.重复性0.3ÊäÈëѹÁ¦Îª1.4 kgf/cm2时3LPM以下工作温度 -10输出特性线性等百分比可设定16点95RH(40选项选项20mA(DC 10ExiaBT6+H 3.3ib相对湿度65四 . 型号分类及订货代码AEPCV3000Ecotrol20100五 . 内部结构AEP直行程智能定位器内部结构如下图所示Ä£¿é»¯µÄÉè¼Æ六 .安装1.外形尺寸图2. 机械连接与执行机构连接示意图l有管路连接(侧连)AEP300LS和执行机构连接示意图 AEP300L D和执行机构连接示意图AEP300RS和执行机构连接示意图 AEPl连接端子前请确认电源是否切断带阀位输出除外20mA直流电源标准型3.2mA最大电流不得超过24mAÐèÏò·§Î»Êä³öÄ£¿éÌṩ9×î´ó²»³¬¹ý30V²úÆ·ÄÚÇë²»ÒªÔÚ¸ßÈÝÁ¿µç»úµÈ²úÆ·¸½½ü°²×°µçÀÂa. 电流输入信号端子的连接l拧开AEP外壳上面的4个M4螺丝l拧开固定输入电流信号接线端子的螺丝l把信号线按照正负极正确连接(注意正负极并拧紧固定螺丝即可打开l通过AEP的接线导管引入信号线以免接错)c. 接地端子的连接l为了AEP和系统的安全l接地线可连接在接线柱上的中央端子或接线导管旁边的外部端子上l拧开AEP外壳上面的4个M4螺丝七 . 基本功能操作1 .自动/手动开关AEP系列智能定位器有自动/手动开关按AEP的动作要求当开关设为手动时直接输入执行机构有可能发生振动使用一字螺丝刀适当的调整可调节型节流孔就可以解决振动问题本操作会使阀门和执行机构动作请务必将阀门从整个系统中隔离开4.正常模式的说明向AEP智能定位器输入4¹ý6秒钟后正常动作模式此画面中下行文字RNU表示目前AEP正接受外部4ÕâÖÖÓÐRUN显示模式叫做RUNģʽ¸Ä±äÊäÈëÐźÅRUN模式由下列6种构成RUN PV阀门行程RUN SV%输入信号1004DigitRUN VeL当前阀门的速度如要改变显示画面ESCUPÿµã»÷Ò»´Î°´×¡键后DOWNÔò·´·½ÏòÒÀ´Î±ä»¯ESC RUN按钮分类中文名称功能确定键更改参数后保存ESC´Óµ±Ç°²Ëµ¥ÍË»ØÒ»¼¶(UP)向上键在当前菜单内更改参数(DOWN)向下键在当前菜单内更改参数八. 自动设定模式AEP智能定位器有AUTO1AUTO3V-0等5种自动设定模式AUTO2自动设定的5种类型和设定内容参数如下表〇〇〇AUTO2〇〇〇〇〇〇AUTO3〇〇〇〇BIAS1. 自动设定1当阀门厂已设定好AEP参数安装到现场后步骤如下在正常模式下ENTERÒº¾§»áÉÁ˸²¢³öÏÖAUTO CAL字样在AUTO CAL状态下ENTERÒº¾§ÉϳöÏÖAOTU1在AOTU1模式ENTERÔò½øÐÐAOTU1自动设定当AOTU1自动设定结束后并显示当前阀门开度按键6秒ENTER按键30.0%RUN PVAUTOCAL¶ÔËùÓòÎÊý½øÐÐÉ趨ʱѡÓÃAUTO220mA 电流约6秒后531数字6秒后出现如下图的信息:ͼÖÐÏÔʾµÄ±íʾ·§ÃÅ¿ª¶ÈµÄÊý×ÖÓпÉÄܲ»Í¬ENTERÔò½øÈëAUTO1显示模式按键点击一次键这时根据自动设定步骤一般在AUTO2模式的自动设定需要3µ«¸ù¾ÝÖ´Ðлú¹¹µÄ´óСºÍÆäËüÒòËØ×Ô¶¯É趨Íê³ÉµÄʱ¼ä»áÓÐËù²»Í¬ 自动设定结束后约过4秒后自动回到RUN模式AEP 的零点PID 参数ENTER按键DOWN按键4秒自动返回模式3 .自动设定3如果要自动初始化所用参数则可以选用AOTU3设定步骤相同在AUTO1模式DOWN Ôò½øÈëAUTO3模式 在AUTO3模式ENTERÔò½øÐÐAUTO3自动设定AUTO3自动设定结束过程跟上述AUTO1相同这个值受到输入空气压力如果改变输入AUTO1AUTO2空气压力值或KP值如果这个值没有正确调准步骤如下顺序和上述AUTO3自动设定步骤的DOWNÔò½øÈëBIAS模式在BIAS模式按键5. 速度感应自动设定速度感应自动设定能准确确定阀门动作速度那么KI调节明显变慢如果这个值正常ESC对准RUN VeL 时一般情况下2范围内那么重新调整V ²½ÖèÈçÏÂ顺序和上述BIAS 自动设定步骤的DOWNÔò½øÈëV-0模式在V-0模式按键九 .手动模式AEP 系列智能阀门定位器还可以根据现场的情况进行手动设定按住键6秒再按一次键ENTER Ôò½øÈëMANUAL 调整模式上行文字表示阀门开度百分比下行жMA 表示正在运行MANUAL 模式 按键或键可使阀门运动阀杆会向上运行;按键如果想加快阀门动作速度UPDOWNENTER按键阀杆慢慢向上运动同时按ENTERDOWNDOWN键阀杆快速向下运动表按键6秒DOWN按键UPDOWN°´键HAND CALÄÇô¾ÍµÃÖØÐÂÉ趨ÁãµãºÍÁ¿³Ì·§Ãźͷ§Î»·´À¡Êä³öÒ²MANU AL30.0%жMR 300 25.0%жMR 243重新设定)和量程在RUN 模式按住键6秒再按3次键ENTER½øÈëµ÷ÕûÁãµãµÄPV-ZERO 显示模式在PV-ZERO 模式下按键阀杆开始向零点移动UP DOWN ÉÏϵ÷Õû·§¸Ë°´键保存零点设定则按2次即可按键移动到调整量程的PV-END 显示模式 按键进入жPE 量程调节模式液晶上行显示阀门开度100下方显示жPE 和行程终点的内部数值 按或键量程到达所需位置后ENTERÕâʱҺ¾§ÏÔʾ+PE 字样按(ESC)键返回PV-END显示模式返回RUN 显示模式在PV-END 显示模式按键按3次键ENTER按键UPDOWNENTER按键DOWN按键UPDOWN按 ESCAUROCAL30.0%RUN PVb. 阀位输出信号零点和量程的设定当改变阀门的零点和量程后如果要得到非常精密的输出信号可以手动进行调整在PV-END 模式按住键ENTER Òº¾§ÏÔʾ§ØR-ZERO 模式这时可调整反馈信号的零点按或使这个值达到4mA 后ENTERÕâʱÏÔʾ+TR-ZERO 字样按(ESC)键退回+TR-END 按键移动到TR-END 显示模式ESCENTER ·§¸ËÏòÖÕµãÒƶ¯²¢¿Éµ÷½Ú·´À¡ÐźÅÁ¿³Ì 按或键按键保存按2次(ESC)键按键ENTER按键或ENTER按键ENTER按或键ESC按2次键250TR- 30.0%RUN2072PV-十. 参数分类及参数值的调节方法阀门执进行自动设定但是有些特殊阀门或在特殊的条件下即有可能发生振动或漂移现象就可解决问题dEAdZONE P调节KI D调节共4种构成死区(dEAdZONE) 因阀杆摩擦力很大而发生振动或漂移等问题KP °´ÊäÈëÐźŴﵽÏàӦλÖõÄËٶȱä¿ìµ±P值过小但会降低动作精度I调节值 I值过大相反过小KDÈÝÒ×·¢ÉúÕñ¶¯Ó°Ïìµ½´ï׼ȷλÖõÄ同特性在RUN模式按住键6秒钟DOWNÔò³öÏÖPARAM字样ENTERÔò½øÐÐdEAdZONE自动设定在dEAdZONE显示模式时按键并显示жEAdZONE字样利用或键可改变dEAdZONE值立即适用于当前动作一边确认动作状况按键进行保存表示已经保存Í˳ödEAdZONE显示模式再按(ESC)键按键6秒钟DOWN按键ENTER按键或 ENTER按3次键KP°´键ENTER½øÈëKP调整模式UP DOWN¸ü¸ÄÉ趨ºóÒò´ËÒ»±ßµ÷ÕûÊäÈëµçÁ÷ÖµÕÒµ½×î¼ÑÉ趨ֵ确定设定值后ENTERÒº¾§ÉÏ»áÏÔʾ+KP字样退出KP显示模式按(ESC)键返回PARAM模式即可返回RUN模式ENTER按2次键ENTER按键ENTER按键或ENTER按3次键键调整KIPARAM5.0%dEAdZO2.0%+EAdZO30.0%RUN PVPARAM5.0%dEAdZO30.0%ЖKP 1030.0%KP 5DOWN½øÈëKI显示模式液晶屏显示KI字样在 KI 显示模式按键液晶屏显示+KI字样利用或键可改变KI值立即适用于当前动作一边确认动作状况按键进行保存表示已经保存按(ESC)键按(ESC)键按键6秒DOWN按键DOWN 按键UP按键ESCDOWNKDDOWN½øÈëKD显示模式液晶屏显示KD字样在 KD 显示模式按键液晶屏显示жKD字样利用或键可改变KD值立即适用于当前动作一边确认动作状况一边运行阀门按键进行保存表示已经保存按(ESC)键按(ESC)键30.0%RUN PVAUTOCAL30.0%+KI1430.0%RUNPVPARAM5.0%dEAdZOENTER按2次键ENTER按键ENTER按键或ENTER按3次键键调整返回RUN模式十一.阀门工作模式1. 阀门模式a.动作模式DARAb.流量特性模式通常有线性快开USER SET根据用户需求d. 紧密开放可紧密开放阀门TSHUT CL当外部输入信号达到4mA 左右的设定值时f. 段幅控制20mA12 mA20mA范围内进行全程段幅控制在RUN模式按住键6秒在按4次键移动到VALVE 模式ENTER按进入жACT RA调整模式按或键按键保存返回RUN 模式30.0%Kd 530.0%+Kd1130.0%RUNPVDOWN 按键ENTER按(UP)或键调整后按键ESC返回RUN 模式b. 流量特性模式变更ENTER当反作用时DOWN ENTER ³öÏÖ§¨HAR LIN ,并可调整流量特性模式按或键如EQ°´键保存流量特性按3次(ESC)键ENTER按键ENTER按(UP)或键调整后按键ESC返回RUN 模式c. 用户自定义特性模式的变更ENTER当反作用时DOWN ENTER³öÏÖ§ØPO SET 模式液晶上行显示的数字是PO 设定的阀门开度百分比 按或键P0值保存后自动显示жP1 SET 模式调整方法跟жPO SET 相同相同方法设定P2到P15的阀门开度百分比值后保存按保存以上操作完成16个点的设定+RCT dRЖRCT30.0%RUN PVVALVEENTER按2次ENTER(UP)或键调整ENTER设定PI 的值P5值ENTER按3次d.完全开放模式的调整ENTER当反作用时DOWNENTER ³öÏÖ§ØSHUT OP 模式, 可设定全开的起始点开度 按或键按键保存返回RUN 模式当TSHUT OP 值为100ENTER 按3次键 ENTER 按或键调整后按键ESC返回RUN 模式e. 完全紧闭模式的调整ENTER当反作用时DOWNENTER ³öÏÖ§ØSHUT CL 模式, 可设定全开的起始点按或键按键保存返回RUN 模式VALVE RCTRA+SERSET100.0%ЖP15SET30.0%RUN95.0%ЖSHUT注时表示解除这个功能按键DOWN按键UPDOWN ENTER按3次键SPLIT在VALVE 模式按住键, 进入ACT RAÏÔʾģʽ按5次键标准输入信号设定为4ENTER ³öÏÖ§ØSPLIT调整模式UPDOWN°´键保存返回RUN 模式按键DOWN按键UPDOWN ENTER按3次键30.0%ЖPI0.5%ЖSHUT RCTRA4.20%SPLIT0.3%TSUT CL十二 .查看模式这个模式给用户提供多种信息DOWNENTER½øÈë¿É»ñµÃAEP 很多信息的模式按或键按(ESC)返回VIEW 模式按(ESC)键返回RUN 模式按5次键ENTER 按或键ESC返回RUN 模式项目内容AEP300产品的型号标记VERSION主程序软件的版本VIEWAEP30HART V HART协议的版本POL AddR在HART协议使用的频道地址BIAS VI内部变量中进行马达控制所必要的BIAS值跟用户无关当打开或关闭电源时所用的时间未满1分钟时不计FULL-OP阀门全开时间的总时间FULL-CL阀门全关时间的总时间VM NOR液晶上阀门开度的显示方式有百分比和数字2种显示方式这是生产厂家利用的值在查看模式可确认的项目和内容十三 .错误警告代码当AEP使用中出现异常时确认错误警告代码对应的内容后1. 错误代码出现这个代码时AEP不可控制2. 警告代码出现这个代码时AEP300可以控制对应代码B,F,G,H项反馈杆使用角度太小增加反馈杆回转角度后以上的错误持续1分钟以上阀杆摩擦力太大气源输入压力进行BIAS自动设定D I值接近最大或最小- 阀门摩擦力发生变化- 气源输入压力发生变化气源输入压力调整为正常范围内的压力进行BIAS自动设定E未定未定F全开表: 错误代码和相关措施十四 . 主程序软件导航图。