注塑机机械手编程操作方法(要领)
注塑机机械手说明书

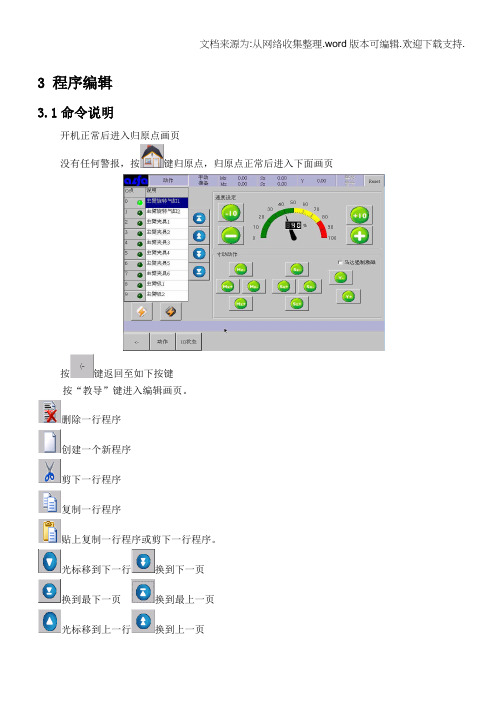
注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
注塑机操作手册

注塑机操作手册1 操作方式操作手册里面的说明可让您对HMI的面板按键及屏幕画面更熟悉。
假如找不到您要的或想寻找更多按键及屏幕画面的相关数据, 请查询操作画面的相关部份。
1.1 开关模单元的设定当您在更换模具时, 请完全依照机械厂人员所教您的方法,以避免造成人员受伤。
当模具安装完成后, 请确定模具,座台及射出单元是否已调好整适当数据, 以避免机器的损坏。
除此之外, 您必须确定料管是否与模具连接好及模具是否已被安全地固定好。
1.1.1 如何调整模具厚度(直压机不使用此部份)在重新装置模具时, 使用调模按键去调整模具的厚度。
按―调模进‖键来调整减少模具厚度( 降低在静态模座及动态模座之间距离) 或按―调模退‖键来调整增加模具厚度( 增加在静态模座及动态模座之间距离) 。
持续按此键,模座会连续动作。
此模座将会面慢慢移动和停止。
持续按此键维持1秒以上模座将开始连续移动, 放开此键将停止模座的移动。
假如您按此键并立即的放开, 此模座将慢慢的移动及停止也就是所谓―微调‖。
您可以重复操作将模座移到所要求的位置。
关机并安装新的模具.当您已经安装好新的模具,请关上安全门并开机然后按调模使用键,才可使用手动调模动作。
模具更换之后, 您可在托模画面中(也就是屏幕上的F2)来改变调模的速度及压力设定。
假如有必要, 您也可为新的模具设定模具数据或加载已设定好的模具数据。
当调整的数据设定完成后, 再按一次调模使用键来关闭模具。
当模具关闭之后, 控制器会照我们所设定的数据执行自动调模。
当自动调模已经执行完成, 所有的动作将会停止并且会发出警报声。
此时, 就会退回手动的状态下。
请注意: 为了安全起见,必须先回到手动模式下, 才可使用模具调整键或手动键。
假如您想要使用其它的模块, 请在手动模式状态下再改变您想要的模块。
假如在模具调整当中您遇上问题, 请按下手动键,来为紧急重制停止动作。
1.1.2 关模及如何保护模具关模可执行四段压力速度: 关模快#1, 关模快#2, 关模低压和关模高压。
注塑机机械手使用方法
注塑机机械手使用方法注塑机机械手是一种用于注塑机操作和自动化生产的设备。
它具有精确的定位控制,高效的作业速度和稳定的运行性能,被广泛应用于制造业的各个领域。
下面将详细介绍注塑机机械手的使用方法。
一、安装调试1. 检查注塑机机械手的外观和内部结构,确认设备完好无损。
2. 将机械手安装在注塑机旁边的工作台上,确保机械手与注塑机之间有足够的操作空间。
3. 将机械手的电源线和控制线连接到对应的电源和控制系统上。
4. 根据注塑机的参数设置,对机械手进行调试和校准,确保它能够准确地抓取注塑件并进行操作。
二、操作流程1. 开机准备a. 打开注塑机和机械手的电源开关。
b. 启动注塑机和机械手的控制系统,并进行初始化。
c. 清理注塑机的工作台和周围环境,确保工作环境整洁。
2. 参数设置a. 根据注塑件的尺寸、重量和工艺要求,设置机械手的抓取和操作参数,包括抓取点坐标、速度、力度等。
b. 根据生产任务的要求,设置机械手的作业模式,如单循环操作、连续运行、自动换模等。
3. 作业操作a. 手动操作:通过控制面板或操作手柄控制机械手进行手动操作,包括移动、抓取、放置等。
进行手动操作时,需要操作员具备相关技术和经验,确保操作安全和准确。
b. 自动化操作:通过预设程序和触发信号,实现机械手的自动化操作。
操作员只需设置好注塑机和机械手的参数,启动自动操作模式,机械手将按照预设程序进行操作,减少人工干预和提高生产效率。
4. 监控和调试a. 在操作过程中,及时监测机械手的运行状态和作业效果,如抓取力度、抓取准确度等。
如有异常或问题,及时进行调整和修复。
b. 定期对机械手进行保养和维护,清洁抓取爪、油润滑系统、检查电气部件的连接情况等,确保设备的正常运行和延长使用寿命。
5. 安全操作a. 在操作注塑机机械手时,操作员应严格按照操作规程进行操作,遵守安全生产规范。
b. 在进行机械手操作前,确保注塑机停止工作,避免误操作引起事故。
6. 故障排除a. 如果机械手出现故障或异常,及时停机排除故障,避免对生产环节造成影响。
注塑机机械手程序教材-精选文档
(5)(1)
(4) (3) (2)
cnc38
副臂的主要位置
副待机位:开始取件前副臂所处位置 (10) (6) ,是机械手副臂工艺程序开始也是工 艺程序结束的位置(如图点6) 副臂下行:副臂下行进入模内的位置 (如图点7) 副夹水口:副臂夹取水口的位置(如 图点8) 副臂后行:副臂夹完水口,在模内准 备上行到模外的位置(如图点9) 副臂上行:主臂从模内上行到模外的 (7) 位置(如图点10) (9) 副放水口:副臂放置水口的位置。
注塑机机械手
cnc38
本次设计采用路径规划的原理来实现教导方式
取物点
取物点
L型取件
变形 L型取件
取物点
取物点
嵌件点
嵌件点
有嵌件式取件
cnc38
变形有嵌件式取件
主臂的主要位置
+ 主待机位:开始取件前主臂所处位置,
+
+
+ + +
是机械手主臂工艺程序开始也是工艺程 序结束的位置(如图点1) 主臂下行:主臂下行进入模内的位置 (如图点2) 主取产品:主臂取注塑件的位置(如图 点3) 主臂后行:主臂取完塑件,在模内准备 上行到模外的位置(如图点4) 主臂上行:主臂从模内上行到模外的位 置(如图点5) 装箱位置:主臂放置产品的位置。
R1000 R1001 R1002 R1003 R1004 R1005 R1006 R1007 R1008 R1009 R1010 R1011 R1012
R1400 R1401 R1402 R1403 R1404 R1405 R1406 R1407 R1408 R1409 R1410 R1411
cnc38
N0
注塑机机械手说明书.docx
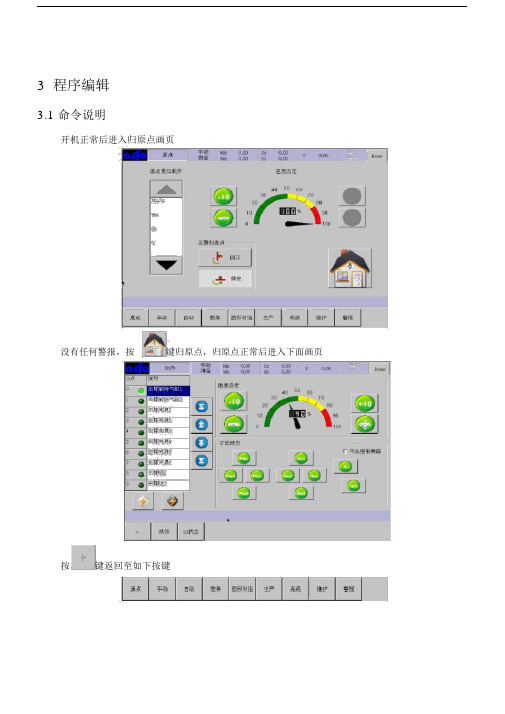
3程序编辑3.1 命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“ MX ”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般 I/O按键进入侧姿回正等选择。
5)成型 I/O按键进入成型相关条件设定。
6)治具 I/O按键进入治具相关功能设定。
7)周边 I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10)停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为 0~99 共 100 个。
12)堆叠按键进入装箱取物功能设定。
编号为 0~3 共 4 个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
艾尔发注塑机机械手说明书

4.维护篇4.1系统相关参数设定按键返回到下面操作键。
4.1.1操作设定按“系统”键进入下画页。
4.1.2禁区设定按“禁区”键进入下画页。
在此画面设定各轴禁区位置。
4.1.3极限设定按“极限”键进入下画页。
在此画面设定各轴最大最小值。
4.1.4出厂设定按“出厂”键进入下画页。
在此面可以看机械出厂前相关信息。
4.1.5语言切换按“语系”键进入文字切换。
4.1.6系统参数备份按“备份”键进入系统参数备份。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
如下图所示:若U盘内有改好的Ladder,可以由USB汇入。
更改PLC后由此传到控制器。
4.1.7系统升级按键返回,再按“>>”键切换下一功能键,点击“升级”键。
在主机USB接口插入U盘,盘内有要升级的程序,点“确定”开始程序升级。
4.2系统维护在操作切换栏按“维护”键进入下面画页。
在此画面可以观看系统变量内的值,程序执行时是否按要求变化。
发生故障时查找原因。
按“I/OMap”键进入下面画页。
在DIMap,DOMap内offset位看I/O点实际对应硬件接线位置。
按键返回,再按“切换用户”键进入下面画页。
在此画页内更改操作权限。
10~19为机械厂使用权限。
20~29为编辑权限。
99为一般用户权限。
改变使用者等级输入密码"****"点击OK键后出现如下画页在此等级下,进入编辑,修改。
按键返回,再按“操作权限”键进入下面画页。
此画页设定不同画页采用不同使用权限。
按键返回,再按“变更密码”键进入下面画页。
用户根据要求设定新密码。
按键返回,再按“阶梯图”键进入下面画页。
通过此画页看程序运行,以及PLC输入输出等状态。
4.3教好程序备份在教导画页内按“档案”键进入下面画页。
在此画页按“汇入汇出”键进入下面画面。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
注塑机器人编程操作流程
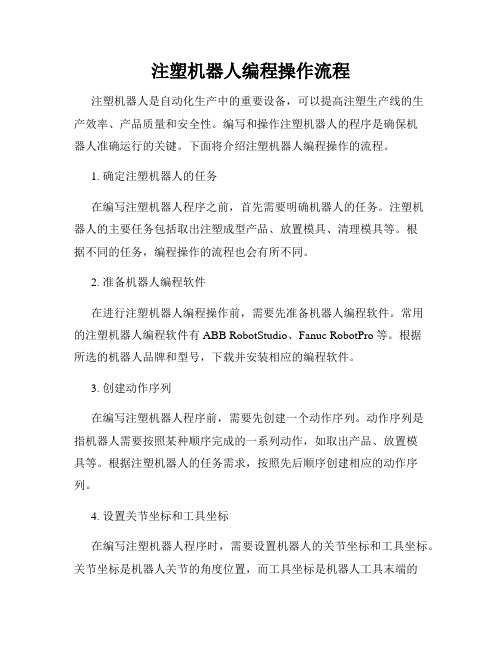
注塑机器人编程操作流程注塑机器人是自动化生产中的重要设备,可以提高注塑生产线的生产效率、产品质量和安全性。
编写和操作注塑机器人的程序是确保机器人准确运行的关键。
下面将介绍注塑机器人编程操作的流程。
1. 确定注塑机器人的任务在编写注塑机器人程序之前,首先需要明确机器人的任务。
注塑机器人的主要任务包括取出注塑成型产品、放置模具、清理模具等。
根据不同的任务,编程操作的流程也会有所不同。
2. 准备机器人编程软件在进行注塑机器人编程操作前,需要先准备机器人编程软件。
常用的注塑机器人编程软件有ABB RobotStudio、Fanuc RobotPro等。
根据所选的机器人品牌和型号,下载并安装相应的编程软件。
3. 创建动作序列在编写注塑机器人程序前,需要先创建一个动作序列。
动作序列是指机器人需要按照某种顺序完成的一系列动作,如取出产品、放置模具等。
根据注塑机器人的任务需求,按照先后顺序创建相应的动作序列。
4. 设置关节坐标和工具坐标在编写注塑机器人程序时,需要设置机器人的关节坐标和工具坐标。
关节坐标是机器人关节的角度位置,而工具坐标是机器人工具末端的位置。
通过设置关节坐标和工具坐标,可以确保机器人在执行动作时的准确性。
5. 编写程序根据创建的动作序列和设置的坐标,开始编写注塑机器人的程序。
机器人程序通常由一系列的指令组成,包括运动指令、条件判断指令和循环指令等。
根据注塑机器人具体的操作流程,编写相应的指令,并确保程序的逻辑正确和通畅。
6. 调试程序编写完成注塑机器人程序后,需要进行程序调试。
通过模拟注塑生产线的实际操作环境,检验机器人的动作是否准确、稳定,并且不会与其他设备或人员发生冲突。
如有必要,还可以对程序进行调整和优化,以确保机器人的编程操作流程无误。
7. 下发程序到机器人控制器调试完成后,可以将编写好的注塑机器人程序下载到机器人控制器中。
在控制器中运行程序之前,务必确保机器人和周围环境的安全。
在下发程序之前,应该先将生产线停机,并确保无人操作。
机械手编程教程自学
机械手编程教程自学机械手编程是为机械手提供指令的一种计算机语言,是控制机械手进行自动化工作的必备技能。
它使用特定的编程语言来控制机械手的位置,方向和速度,从而实现高效的自动化工作。
如今,机械手编程正成为工厂自动化的重要组成部分,很多公司都需要拥有熟练的机械手编程人员,因此学习机械手编程已经成为一项重要技能。
机械手编程教程自学是一种选择,学习者可以根据自己的情况,自由选择教程和学习方式,自学机械手编程。
以下是自学机械手编程的几个必要步骤:第一步,了解机械手编程的基本概念。
机械手编程语言可以分为基本语言和高级语言,比如C、C++、Java等,在学习之前,应先对编程的基本概念有一定的了解,以便能够更好地理解编程语言的基本原理和结构。
第二步,熟悉有关机械手编程的指令集。
学习机械手编程时,应该充分了解各种指令集,例如G代码、M代码、S代码等,了解各种指令集的具体用法,这样才能更好地学习机械手编程。
第三步,掌握机械手编程的基本语法。
每种编程语言都有其独特的语法,学习者需要熟悉机械手编程的基本语法,以便能够正确使用机械手编程语言进行编程。
第四步,学习如何使用机械手编程软件。
机械手编程软件可以帮助学习者更加有效地完成机械手编程,因此,学习者应该学习相关软件的使用方法,并能够正确使用编程软件完成编程任务。
第五步,熟悉机械手编程的应用领域。
机械手编程可以应用于多个领域,例如机械组装、焊接、装配等,学习者需要深入学习机械手编程的各种应用场景,以便能够更好地应用机械手编程。
第六步,多实践,不断积累经验。
在学习机械手编程时,学习者要多实践,尝试不同的编程语言,多总结经验,不断提高自己的机械手编程水平。
以上就是机械手编程教程自学的基本流程,在学习机械手编程时,学习者要把握好学习步骤,认真学习,不断实践,积累实践经验,才能够更好地掌握机械手编程的知识。
注塑机--机器人程序编程说明书

1#抓手 2#抓手 3#抓手 4#抓手 左压料气缸 右压料气缸 横移气缸 水口切气缸 滚筒线 料篮前定位气缸 模顶柱允许顶出 模顶柱允许顶退
允许移模 自动循环 吹气 1 三色灯红灯 蜂鸣器 吹气 2 料篮侧定位气缸 吹气 3
B1 B2 B3 B4 水口机中没抓到料 B5 注塑机上没抓好新料 B6 自动压料 B7 滚筒自动送料篮 B8 压料没到位 B9 B10 B11 料篮取计数 B12 料篮放计数
第3页
IF B011<>0 ADD P021 P020
ENDIF SFTON P021 MOVL V=800.0 MOVL V=800.0 PL=0 MOVL V=200.0 PL=0 DOUT OT#(3) ON DOUT OT#(4) ON TIMER T=0.30 MOVL V=800.0 PL=0 MOVL V=800.0 INC B011 IF B011=5
到预热台,取预热好的产品,放下没预热新产品
到注塑机,取注塑好产品,放下预热好产品
等待转台定位完成,等待模具顶柱顶出产品, 取出已注塑产品,放下新产品,模具顶柱缩回。 横移气缸自动推出,两个下压气缸锤 3 次。横 移气缸缩回,发出转台转动信号。
到切水口机,放下注塑好产品,切水口,再取出来
到料篮,放下切过水口的产品
料篮中,放产品计数变量为 B12,从第一排开始, B12=0,每放下一排,B12 加 1,料篮最后一排不放 已加工产品,当第 14 排放下,B12=14,然后令 B12=0,接着从下一框料篮开始放。Leabharlann 第2页MAIN 主程序
注塑机机械手编程操作方法(要领)

650注塑机机械手编程操作方法1.先原点复归,按“原点复归”后,按下“▶□”(开始/停止键),机械手自动原点复归;2.动作顺序编程:原点直线移动等待点(X轴、Y轴的值要设置,Z轴为0)姿势复归姿势复归时间(1.00S),姿势监控(5S)开模完成直线移动下降点1(X轴、Y轴值和等待点一样,Z轴要设置)直线移动前行点1(模具)(X轴、Z轴的值不变和下降点1一样,Y轴值要设置)计时(0.5S)治具闭(吸着1使用或夹具1使用)计时T13(0.5S)直线移动后退点1(X轴、Z轴的值不变;Y轴的值可以和等待点的一样)直线移动上升点1(X轴和Y轴的值不变,Z的值为0)姿势动作(姿势时间1S,姿势监控5S)允许合模直线移动前行点2(X轴不变,和等待点一样,Z值为0,Y轴值变大,要设置)直线移动横出点1(X轴的值变大,到达工作台上方,Y轴不变和前行点一样,Z轴为0)直线移动下降点2(到工作台面,X轴和Y轴的值不变,Z轴的值变大)治具开(吸着1使用或夹取1使用)计时直线移动上升点2(和横出点1的值一样,X轴,Y轴不变,Z值为0)直线移动横入点(Y轴、Z轴的值不变,X轴变小,这里可以取等待点的X,Y,Z 轴点的数值)返回3.设置要领3.1 原点复归3.2等待点(最好是在开模后动、定模之间距离的一半的上方,以不挂到零件为好,这里X值、Y值都设置[X1,Y1],Z值为[Z1=0])3.3 姿势复归(不用设置)3.4 开模完成3.5下降点1(下降高度以能吸住零件为准,X、Y值和等待点一样[X2=X1,Y2=Y1],Z值要设置[Z2])3.6前行点1(X轴值X3=X1,Z轴值Z3=Z2,Y轴的值要设置[Y3])3.7 计时(0.5S),主要防止吸不住零件;3.8治具闭(选择吸着1使用或者夹取1使用)3.9计时T13(0.5S)3.10 后退点1(X轴值X4=X2=X1,Y轴值Y4=Y2,Z轴值Z4=Z2)3.11 上升点1(X轴值X5=X1,Y5=Y1,Z5=Z1=0)3.12 姿势动作3.13 允许合模3.14 前行点2(X轴值X6=X1,Z轴值Z6=Z1=0,Y轴值[Y6]要设置)3.15 横出点(X轴值要设置[X7],Y轴值Y7=Y6,Z轴值Z7=Z1=0)3.16 下降点2(X轴值X8=X7,Y轴值Y8=Y7=Y6,Z轴值要设置[Z8])3.17 治具开(选择吸着1使用或者夹取1使用)3.18 上升点2(X轴值X9=X8=X7,Y轴值Y9=Y8=Y7=Y6,Z轴值Z9=Z1=0)3.19 横入点=前行点2(X轴值X10=X6=X1,Y轴值Y10=Y6,Z轴值Z10=Z1=0)3.20 返回 Y轴X轴Z轴。
机械手操作及编程

3 程序编辑命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般I/O按键进入侧姿回正等选择。
5)成型I/O按键进入成型相关条件设定。
6)治具I/O按键进入治具相关功能设定。
7)周边I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10) 停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为0~99共100个。
12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
注塑机机械手说明书
注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
注塑机机械手说明书
3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般I/O按键进入侧姿回正等选择。
5)成型I/O按键进入成型相关条件设定。
6)治具I/O按键进入治具相关功能设定。
7)周边I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10) 停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为0~99共100个。
12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
2)轴操作到待机位置按键进入各轴直线运动操作,如下图所示。
注塑机机械手调试

注塑机机械手调试导言注塑机机械手是现代注塑成型生产线中重要的自动化设备,其主要作用是在注塑机生产过程中,对注塑成型好的产品进行取料、放料、堆叠等操作。
在使用注塑机机械手前,需要对其进行调试,保证机械手的正常运行和工作效率。
本文将介绍注塑机机械手调试的步骤和注意事项。
步骤1. 确定机械手安装位置在调试注塑机机械手之前,需要确定机械手的安装位置。
通常,机械手应该安装在注塑机的一侧,便于取料、放料等操作。
安装位置应尽量避免与注塑机和其他设备的干涉,以确保机械手正常运行。
2. 连接电源和通信线路接下来,将机械手的电源和通信线路与注塑机或控制系统连接。
确保电源和通信线路连接正确,以避免后续调试出现问题。
3. 开机和初始化接通机械手的电源后,按照机械手的操作手册进行开机和初始化操作。
通常情况下,机械手控制器会完成一些自检和校准操作,确保机械手处于正常的工作状态。
4. 调试运动轨迹调试机械手的运动轨迹是非常重要的一步。
通过调整机械手控制器上的相关参数,可以使机械手在规定的运动范围内进行精确的移动。
在调试运动轨迹时,需要注意以下几点:•确保运动轨迹与注塑机的生产节奏相匹配,以确保机械手可以在合适的时间点进行取料、放料等操作。
•注意机械手的移动速度和加减速度,确保机械手的运动平稳,避免产生震荡或影响注塑机的正常生产。
5. 调试取料和放料功能在注塑机生产过程中,机械手的主要任务是进行取料和放料操作。
因此,调试机械手的取料和放料功能是非常关键的一步。
在调试取料和放料功能时,需要注意以下几点:•确保机械手可以准确地捕捉产品,并放置在指定的位置。
调整机械手的抓取力度和抓取方式,以适应不同类型产品的取料和放料需求。
•调试产品的堆叠方式和位置,确保产品堆叠整齐、稳定,并符合规定的堆叠高度和数量要求。
6. 验证机械手的稳定性和精度完成以上步骤后,需要验证机械手的稳定性和精度。
通过让机械手进行连续的取料和放料操作,观察机械手的运动轨迹和动作的准确性。
伟力机械手操作指导书22
长春富维梅克朗汽车镜有限公司【设备操作规程】P12-S -03-14版次:A/0
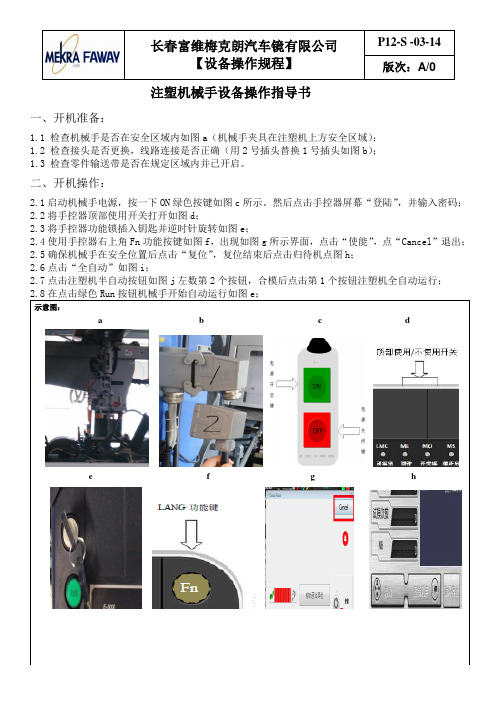
注塑机械手设备操作指导书
一、开机准备:
1.1 检查机械手是否在安全区域内如图a(机械手夹具在注塑机上方安全区域);
1.2 检查接头是否更换,线路连接是否正确(用2号插头替换1号插头如图b);
1.3 检查零件输送带是否在规定区域内并已开启。
二、开机操作:
2.1启动机械手电源,按一下ON绿色按键如图c所示。
然后点击手控器屏幕“登陆”,并输入密码;
2.2将手控器顶部使用开关打开如图d;
2.3将手控器功能锁插入钥匙并逆时针旋转如图e;
2.4使用手控器右上角Fn功能按键如图f,出现如图g所示界面,点击“使能”,点“Cancel”退出;
2.5确保机械手在安全位置后点击“复位”,复位结束后点击归待机点图h;
2.6点击“全自动”如图i;
2.7点击注塑机半自动按钮如图j左数第2个按钮,合模后点击第1个按钮注塑机全自动运行;
2.8在点击绿色Run按钮机械手开始自动运行如图e;
示意图:
a b c d
e f g h
i j
三、停机操作:
3.1 短暂停机,触控“循环停止”如图f,选择“是”,此时完成此次动作后,注塑机不再合模。
切记将注塑机切换成手动模式。
3.2 长时间停机,触控“循环停止”如图f,选择“是”,当机械手完成此次动作后切断电源,更换欧规接头。
审批:审核:编制:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
650注塑机机械手编程操作方法
1.先原点复归,按“原点复归”后,按下“▶□”(开始/停止键),机械手自动原点复归;
2.动作顺序编程:
原点直线移动等待点(X轴、Y轴的值要设置,Z轴为0)姿势复归姿势复归时间(1.00S),姿势监控(5S)
开模完成直线移动下降点1(X轴、Y轴值和等待点一样,Z轴要设置)直线移动前行点1(模具)(X轴、Z轴的值不变和下降点1一样,Y轴值要设置)计时(0.5S)治具闭(吸着1使用或夹具1使用)计时T13(0.5S)
直线移动后退点1(X轴、Z轴的值不变;Y轴的值可以和等待点的一样)直线移动上升点1(X轴和Y轴的值不变,Z的值为0)姿势动作(姿势时间1S,姿势监控5S)允许合模直线移动前行点2(X轴不变,和等待点一样,Z值为0,Y轴值变大,要设置)直线移动横出点1(X轴的值变大,到达工作台上方,Y轴不变和前行点一样,Z轴为0)直线移动下降点2(到工作台面,X轴和Y轴的值不变,Z轴的值变大)治具开(吸着1使用或夹取1使用)计时直线移动上升点2(和横出点1的值一样,X轴,Y轴不变,Z值为0)直线移动
横入点(Y轴、Z轴的值不变,X轴变小,这里可以取等待点的X,Y,Z 轴点的数值)返回
3.设置要领
3.1 原点复归
3.2等待点(最好是在开模后动、定模之间距离的一半的上方,以不挂到零件为好,这里X值、Y值都设置[X1,Y1],Z值为[Z1=0])3.3 姿势复归(不用设置)
3.4 开模完成
3.5下降点1(下降高度以能吸住零件为准,X、Y值和等待点一样[X2=X1,Y2=Y1],Z值要设置[Z2])
3.6前行点1(X轴值X3=X1,Z轴值Z3=Z2,Y轴的值要设置[Y3])3.7 计时(0.5S),主要防止吸不住零件;
3.8治具闭(选择吸着1使用或者夹取1使用)
3.9计时T13(0.5S)
3.10 后退点1(X轴值X4=X2=X1,Y轴值Y4=Y2,Z轴值Z4=Z2)
3.11 上升点1(X轴值X5=X1,Y5=Y1,Z5=Z1=0)
3.12 姿势动作
3.13 允许合模
3.14 前行点2(X轴值X6=X1,Z轴值Z6=Z1=0,Y轴值[Y6]要设置)3.15 横出点(X轴值要设置[X7],Y轴值Y7=Y6,Z轴值Z7=Z1=0)3.16 下降点2(X轴值X8=X7,Y轴值Y8=Y7=Y6,Z轴值要设置[Z8])3.17 治具开(选择吸着1使用或者夹取1使用)
3.18 上升点2(X轴值X9=X8=X7,Y轴值Y9=Y8=Y7=Y6,Z轴值Z9=Z1=0)3.19 横入点=前行点2(X轴值X10=X6=X1,Y轴值Y10=Y6,Z轴值Z10=Z1=0)
3.20 返回 Y轴
X轴
Z轴。