机械原理--速度瞬心习题讲解学习
机械原理课件瞬心例题
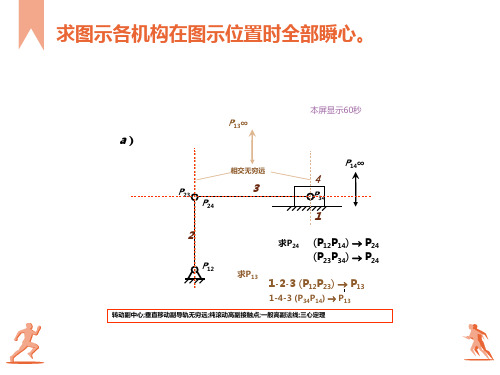
b)
P13
求P24
(P12P14) P24 (P23P34) P24
本屏显示60秒
P34 3
2
4
P12
P14∞
P24
求P13
1
1-2-3 (P12P23) P13
1-4-3 (P34P14) P13
转动副中心;垂直移动副导轨无穷远;纯滚动高副接触点;一般高副法线;三心定理
本屏显示60秒
水平方向无穷远处有P12,通过P12作竖线连接P14
比1/ 3 。
解: 1. 绘机构运动简图 2.求瞬心P13 3.求1/ 3
1 P36 P13 3 P16 P13
求P13
1-2-3 (P12P23) P13
1-6-3 (P36P16) P13
2
P23
P12 4
P13
P36 5
ห้องสมุดไป่ตู้
3
6
转动副中心;垂直移动副导轨无穷远;纯滚动高副接触点;一般高副法线;三心定理
本屏显示60秒
求P24
(P12P14) P24
(P23P34) P24
c)
P13
M
P23
2
P12
P14
4
3
P24
求P13 1-2-3 (P12P23) P13
1
1-4-3 (P34P14) P13
转动副中心;垂直移动副导轨无穷远;纯滚动高副接触点;一般高副法线;三心定理
本屏显示60秒
在图示的齿轮-连杆组合机构中, 试用瞬心法求齿轮1和3的传动
该线与通过P23P34的斜线相交于倾斜方向无穷远点
P12∞
c)
求P24
(P12P14) P24
机械原理中的速度瞬心讲解
机械原理中的速度瞬心讲解速度瞬心是机械原理中的一个重要概念,它在机械传动、运动学和动力学问题的研究中扮演着至关重要的角色。
本文将从定义、原理、应用以及相关公式等多个角度对速度瞬心进行详细讲解。
一、定义和原理速度瞬心是指在机械运动过程中,质点速度矢量的方向和瞬心所在直线方向相重合的点。
简单来说,速度瞬心就是质点瞬时速度的方向与它所在直线方向的交点。
在机械运动过程中,瞬时速度是质点在某一瞬间的瞬时速度,它的大小是瞬时速度的矢量,方向是切线方向。
而速度瞬心则是质点的速度矢量方向与瞬心所在直线方向相重合的点。
速度瞬心的计算方法有很多,其中最常用的方法是使用切线的性质。
在曲线运动中,我们可以通过将切线向后延长,找到两条切线的交点,这个交点就是速度瞬心。
二、速度瞬心的应用速度瞬心在机械工程中有广泛的应用,尤其在运动学和动力学的问题分析中起到了重要作用。
下面以几个具体的例子来说明速度瞬心的应用。
1. 齿轮传动齿轮传动中,速度瞬心常用来确定传动比和齿轮的尺寸。
在两个齿轮相互啮合时,它们的速度瞬心位于齿轮啮合线上,通过计算速度瞬心的位置,可以确定齿轮的啮合情况、传动比和齿轮的尺寸。
2. 曲柄连杆机构曲柄连杆机构中,速度瞬心可用于分析和计算连杆的运动规律。
通过计算连杆各个位置的速度瞬心,可以得到连杆的位移、速度和加速度等参数,从而研究连杆运动的特性和工作原理。
3. 自行车前叉自行车前叉是一种常见的悬挂系统,其原理基于速度瞬心。
在自行车行驶过程中,前叉通过改变前轮的速度瞬心位置来调整悬挂系统的刚度。
通过调整速度瞬心的位置,可以使得前叉对不同路面的冲击吸收能力更好,提高骑行的舒适性和稳定性。
三、速度瞬心的计算方法计算速度瞬心的方法有多种,下面介绍几种常见的计算方法。
1. 直接法直接法是速度瞬心计算的最基本方法,它适用于已知点的速度矢量和所在直线方向的情况。
根据已知点的速度矢量和所在直线的方向,我们可以直接求解速度瞬心。
机械原理及其计算机辅助_ 机构的运动分析_

P34 P24
P13
P12
1
2
ω2
P14
4
P23 3
小结
1. 速度瞬心的概念;
2. 速度瞬心的求解 (1)通过运动副直接相联的两构件的瞬心位置确定
——用定义。 (2)不直接相联两构件的瞬心位置确定
——三心定理。
泰 州 学 院
2-3 用瞬心法作平面机构的速度分析(3)
五、 基于Solidworks的瞬心法平面机构的速度分析
如图中构件1、2的 瞬心用P12表示。
2-3 用速度瞬心作平面机构的速度分析
二、机构中瞬心的数目
由N个构件组成的机构, 其瞬心总数为K N ( N 1) 2
2-3 用速度瞬心作平面机构的速度分析
三、机构中瞬心位置的确定
1. 通过运动副直接相联两构件的瞬心位置确定(用定义)
1.转动副联接两构件的瞬 心在转动副中心。
3.若为纯滚动, 接触点即 为瞬心;
2.移动副联接两构件的瞬心在 垂直于导路方向的无穷远处。
4.若既有滚动又有滑动, 则瞬心 在高副接触点处的公法线上。
2.不直接相联两构件的瞬心位置确定
三心定理: 三个彼此作平面相对运动的构件的 三个瞬心必位于同一直线上。(同学们可课后自己证明)
三、机构中瞬心位置的确定
3. 求构件上某点的速度V或构件的角速度w。
二、优点
1. 本质依然是瞬心法,速度分析概念清楚,求解简单; 2. 可以充分发挥计算机绘图软件的优势,作图快捷,修改方便;且可
以用实际尺寸作图,不需要考虑比例尺的问题; 3. 图纸幅面不受限制,没有瞬心点落在纸面外的困扰; 4. 精度很高,媲美解析法。 5. 当原动件位置变化时,可利用同一个机构运动简图,不需重复作图
机械设计基础第一章 1-3速度瞬心
相对瞬心位于两绝对瞬心的同一侧时 两构件转向相同 转向相同。 相对瞬心位于两绝对瞬心的同一侧时,两构件转向相同。 同一侧 相对瞬心位于两绝对瞬心之间时,两构件转向相反。 相对瞬心位于两绝对瞬心之间时 两构件转向相反。 之间 转向相反
2
P12 ω2
1
P233 ω3 P13
4.用瞬心法解题步骤 4.用瞬心法解题步骤 绘制机构运动简图; ①绘制机构运动简图; ②求瞬心的位置; 求瞬心的位置; 求出相对瞬心的速度; ③求出相对瞬心的速度; ④求构件绝对速度V或角速度ω。 求构件绝对速度V或角速度ω 瞬心法的优缺点: 瞬心法的优缺点: 适合于求简单机构的速度, ①适合于求简单机构的速度,机构复杂时因 瞬心数急剧增加而求解过程复杂。 瞬心数急剧增加而求解过程复杂。 ②有时瞬心点落在纸面外。 有时瞬心点落在纸面外。 ③仅适于求速度V,使应用有一定局限性。 仅适于求速度V 使应用有一定局限性。 求速度
∞ 1 6 2 3 P13 4 P14 1 P36 P26 P35 P12 P46 4 P34 P25 2 P45 5 P56 P23 3 ∞ P16 6 P24 P15
5
二、速度瞬心在机构速度分析中的应用 1.凸轮机构直动从动件求线速度 凸轮机构直动从动件求线速度
3 P23 n2 ∞
已知凸轮转速ω 求推杆的速度。 已知凸轮转速ω1,求推杆的速度。 解: 直接观察求瞬心P 、 ①直接观察求瞬心 13、 P23 。 ②根据三心定律和公法线 n-n求瞬心的位置 12 。 求瞬心的位置P - 求瞬心的位置 ③求瞬心P12的速度 。 求瞬心 V2=V P12=μl(P13P12)·ω1 ω 长度P 直接从图上量取。 长度 13P12直接从图上量取。 ω1 1
机械原理瞬心法求速度习题
机械原理瞬心法求速度习题引言机械原理是工程力学的一部分,研究物体的运动及力学效应。
在机械原理中,瞬心法是一种常用的分析方法,用于求解物体的速度和加速度。
本文将通过解答一些瞬心法求速度的习题,加深对机械原理的理解。
问题一有一个直径为1m的转盘,上面有一个固定在轴上的活动滑块。
滑块到轴的距离为0.5m。
转盘以5 rad/s的角速度逆时针旋转。
求滑块上某点P的速度。
首先,我们需要确定滑块上的点P的位置。
由于滑块到轴的距离为0.5m,而转盘的直径为1m,因此点P的位置位于滑块上与轴对称的位置,距离轴0.5m。
我们可以使用瞬心法来求解滑块上点P的速度。
瞬心法的基本原理是,在运动过程中,物体的速度等于通过瞬时转动中心与物体上的某一点所作的相对速度。
在本题中,我们可以选择转盘的轴作为瞬时转动中心。
因此,我们需要确定点P相对于转动中心的位置向量和其相对于转动中心的速度向量。
点P相对于转动中心的位置向量为[0.5, 0],即P的横坐标为0.5m,纵坐标为0,代表距离转动中心0.5m。
点P相对于转动中心的速度向量为[0, R * ω],其中R 为转盘的半径,即0.5m,ω为转盘的角速度,即5 rad/s。
代入数值计算,得到速度向量为[0, 2.5],即P点的速度大小为2.5 m/s,方向为垂直于转盘的切线方向。
问题二一个直径为0.8m的小车以2 rad/s的角速度逆时针旋转。
小车上有一根长1.2m的杆,杆上距离小车中心0.6m处有一个质量为1kg的小球。
求小球的速度大小和方向。
我们可以使用瞬心法来求解小球的速度。
同样地,选择小车的中心作为瞬时转动中心。
首先,我们需要确定小球相对于转动中心的位置向量和其相对于转动中心的速度向量。
小球相对于转动中心的位置向量为[0.6, 0],即小球距离转动中心0.6m。
小球相对于转动中心的速度向量为[0, R * ω],其中R为小车直径的一半,即0.4m,ω为小车的角速度,即2 rad/s。
速度瞬心法

N=1/2×4×(4一1)=6 转动副中心A、B、C、D各为瞬心P12、 P23、P34、P14,由三心定理可知,P13、 P12、P23三个瞬心位于同一直线上;P13、 P14、P34也应位于同一直线上。因此, P12 P23和P14 P34两直线的交点就是瞬心 P13。
同理,直线P14 P12和直线P34 P23的交 点就是瞬心P24。 因为构件1是机架,所以P12、P13、P14是 绝对瞬心,而P23、P34、P24是相对瞬心。
P12 P23
3、机构瞬心位置的确定
(1)直接观察法 (利用定义) 适用于求通过运动副直接相联的两构件瞬心位置。
P12 P12 2 ∞ 1 n 1 2 n
1
2
1
2
P12
t
t
V12
(2)三心定律
定义:三个彼此作平面运动的构件共有三个瞬 心,且它们位于同一条直线上。此法特别适用 于两构件不直接相联的场合。
P13 n
相对瞬心位于两绝对瞬心之间,两构件转向相反。
3.求传动比 定义:两构件角速度之比传动比。 ω 3 /ω 2 = P12P23 / P13P23 P12 ω 2 推广到一般: 1 ω i /ω j =P1jPij / P1iPij
2
P233 ω 3 P13
结论:
①两构件的角速度之比等于绝对瞬心至相对 瞬心的距离之反比。 ②角速度的方向为:
3 P23 n2 ∞
已知凸轮转速ω 1,求推杆的速度。
ω 11
P13
V2 P12 n
③求瞬心P12的速度 。 V2=V P12=μ l(P13P12)· ω1
长度P13P12直接从图上量取。
2.求角速度 a)铰链机构 已知构件2的转速ω 2,求构件4的角速度ω 4 。 解:①瞬心数为 6个 ②直接观察能求出 4个
机械原理课件瞬心例题
结论和总结
通过学习瞬心的例题和应用,我们对机械原理有了更深入的理解。瞬心是机 械系统中一个重要且复杂的问题,但它也为我们设计和优化机械系统提供了 丰富的信息。
机械Байду номын сангаас理课件瞬心例题
通过这个课件,我们来学习机械原理中的瞬心问题。了解如何计算瞬心,解 决瞬心问题,并探讨瞬心在机械系统中的应用和与平衡的关系。
题目瞬心分析
通过这个例题,我们将深入研究一个机械系统的瞬心问题。通过分析瞬心的 位置和大小,我们可以预测系统的运动和平衡状态。
计算瞬心的方法
了解瞬心的计算方法对于解决机械系统中的问题至关重要。我们将学习如何利用几何和力学原理来计算瞬心的 位置和大小。
解决瞬心问题的策略
当机械系统出现瞬心问题时,我们需要采取一些策略来解决它们。这些策略 可能涉及平衡调整、轴向调整或其他方法。
瞬心在机械系统中的应用
瞬心在机械系统中有许多重要应用。它可以帮助我们设计更稳定和高效的机械系统,提高性能和可靠性。
瞬心与平衡的关系
瞬心与机械系统的平衡有着密切的关系。深入理解瞬心的概念和计算方法可 以帮助我们更好地理解和控制机械系统的平衡状态。
机械原理 瞬心法求速度.

2.确定瞬心的位置
34
P
P24
P 13
A B
P12
C
P 14
P23
3.利用瞬心,由“图”求v3。 因P13是构件1、3的同速重合点,
v3 vP13 1lP
13P 14
VP13 1lP
1P P 13 14 l
P 13 14
3.利用瞬心,由“图”求v3。
得: 从机构位置图中量出图长: P13P14=12.3mm,
(1)两构件组成运动副
根据瞬心的定义,通过观察直接确定两构件的瞬心 位置
两构件组成纯滚动高副
接触点就是其瞬心。 两构件组成滚动兼滑动高副 瞬心在接触点处两高副元素的 公法线n-n上。
1
2
(2)两构件不组成运动副
不直接接触的两构 件,用三心定理确定 其瞬心的位置.
三心定理:
作平面运动的三个构件的三个瞬心位于同一直线上。
v3 vP
注意:
13
1P 13P 14l
m/s
=10×0.0123×2=0.246
图解法的特点体现在直接从“机构位置 图”中量出两点之间的距离。
瞬心法小结
直接利用待求构件和已知构件的相对瞬心,来建立两 者的运动关系。 图解法的特点体现在从“机构位置图”中直接量出两 点之间的距离。 瞬心法适于对构件数较少的机构进行速度分析,不受 机构类型的限制。
下课
1机械原理用速度瞬心法对机构进行速度分析用速度瞬心法对机构进行速度分析瞬心的概念瞬心数目位置例题定义瞬心就是两构件上瞬时绝对速度相同的重合点即等速重合点
机械原理
用速度瞬心法对机构进行速度分析
用速度瞬心法对机构进行速度分析 瞬心 瞬 心 的 概 念
机械基础与设计原理第六讲速度瞬心法计算机构速度

1A
图中若原动件角速度为ω1, 求构件3的速度为多少?
帅的人一般都上课!
速度瞬心概念
速度大小相等; 速度方向相同。
在某一瞬时,平面中的两构件存在具有绝对速度相 等的一对重合点,且两构件相对于该点做相对转动, 这将该重合点称之为速度瞬心,也称之为瞬心
多指平面内 重合
帅的人一般都上课!
概念解析
帅的人一般都上课!
案例分析
帅的人一般都上课!
特例分析
案例结构特征: 相对杆件平行且相等,机构为平行四边形结构; 运动特点: 1、两曲柄以相同的速度、相同的方 向旋转 2、连杆作平移运动
帅的人一般都上课!
应用实例
帅的人一般都上课!
应用实例
帅的人一般都上课!
双摇杆机构
两连架杆均是摇杆形构成的铰链四杆机构。
帅的人一般都上课!
三心定理案例
P24
P23 P12
P34
P14
P13
帅的人一般都上课!
速度瞬心法应用
帅的人一般都上课!
案例导入
C3
D 2
4 B
1A
图中若原动件角速度为ω1, 求构件3的速度为多少?
帅的人一般都上课!
机械基础与设计原理 第6讲
机构运动速度计算
帅的人一般都上课!
学习目标
知识目标
平面四杆机构的基本概念
铰链机构的组成部分基本形式
曲柄摇杆机构的概念
双曲柄机构
双摇杆机构
导杆机构
摇块定块机构
帅的人一般都上课!
平面连杆机构
平面连杆机构是由一定数量的构件用低副连接而成的机构, 各构件均在相互平行的平面内运动。
帅的人一般都上课!
机械原理第三章3-8速度瞬心法培训课件
正确应用瞬时心法是至关重要的。我们将介绍一些使用瞬时心法的实际步骤和注意事项,以确 保准确分析和解决机械系统速度相关的问题。
瞬时心法在机械工程中的重要 性和作用
瞬时心法在机械工程中扮演着重要角色。它不仅帮助我们理解和优化机械运 动,还可以用于设计和改进各种机械系统。了解瞬时心法的重要性将使您成 为卓越的机械工程师。
机械原理第三章3-8速度 瞬心法培训课件
欢迎来到机械原理第三章培训课件!本课程将深入介绍瞬时心法的概念、原 理、应用案例和步骤,并探讨其在机械工程中的重要性和未来发展方向。
瞬时心法的概念与原理
瞬时心法是一种基于瞬时速度和运动属性的分析方法,可用于解决机械系统中的速度相关问题。它通过考虑系 统中每个点的速度和方向,帮助我们更好地理解运动轨迹和动力学特性。
瞬时心法的基本公式与计算方 法
瞬时心法的核心公式即速度瞬心公式,可以通过计算速度和位置矢量之间的 叉积来确定瞬时心的位置。同时,我们将介绍一些常用的计算方法和工具, 以便准确地应用和计算。
瞬时心法的应用案例分析
我们将通过一些实际案例来演示瞬时心法的应用。这些案例将涉及各种机械 系统,例如连杆机构、齿轮传动和曲柄机构。通过分析这些案例,我们将展 示瞬时心法在解决实际工程问题中的有效性。
瞬时心法的发展趋势与前景展 望
随着科技的进步和工程需求的变化,瞬时心法也在不断发展和演进。我们将 探讨当前的发展趋势,并展望瞬时心法在未来的应用和创新领域,为您提供 关于瞬时心法的未来前景的洞察。
总结和结论
通过学习本课程,您将全面了解瞬时心法的概念、原理和应用。我们希望本课程能够帮助您在机械工程领域取 得更大的成就,并为您的职业发展提供有力的支持。
速度瞬心法2图解法求解速度和加速...

l2w
2 2
sin j 2
0
a2
l1w12
sin(j1
j2
)
l
2w
2 2
sin j 2
l2 cosj2
三、导杆机构
1.位置分析
l1 l4 s
l4i l1eij1 seij3
展开取实部和虚部
l1 cosj1 s cosj3 l4 l1 sinj1 s sinj3
t an j 3
l4 l1 sinj1 l1 cosj1
j2
)
l3w
2 3
l3 sin(j3 j2 )
cos(j 3
j2)
a2
l3w
2 3
l1w12
cos(j1
j3
)
l
2w
2 2
l2 sin(j2 j3 )
cos(j 2
j3)
二、曲柄滑块机构
1.位置分析
l1 l2 xC
l1eij1 l2eij2 xC
l1 sinj1 l2 sinj2 0
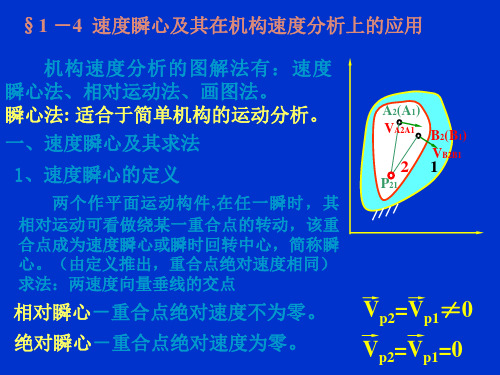
一、速度瞬心法
1 速度瞬心:两作相对运动的刚体,其相 对速度为零的重合点。
绝对瞬心:两刚体其一是固定的
1
相对瞬心:两刚体都是运动的
2
A
B
i构件和j构件瞬心的表示方法:Pij或Pji
P12
2 瞬心的数目
N k(k 1) 2
k 为构件数目
3 瞬心的求法
1) 根据瞬心定义直接求两构件的瞬心
P12 12
0
w2
l1w1 cosj1 l2 cosj 2
3.加速度分析
l1w12eij1
l2a2ieij2
l2w
2 2
机械设计 第1章 速度瞬心
2.直接观察求瞬心
3.三心定律求瞬心
P24
P15
∞
1 6 2 3 P13 4 P14 1 P36 P26 P35 P12 P46 4 P34 P25
2
P45
P23
3 ∞ P16
5
5 P56
6
二、速度瞬心在机构速度分析中的应用 1.求线速度 解: ①直接观察求瞬心P13、 P23 。 ②根据三心定律和公法线 n-n求瞬心的位置P12 。
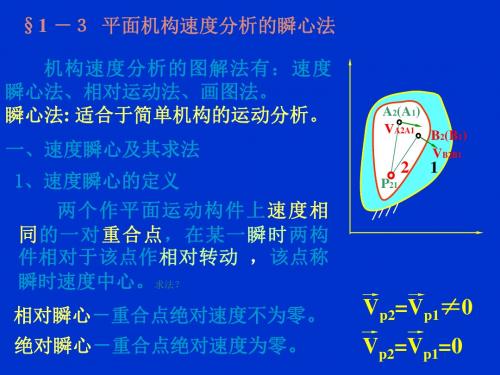
A2(A1) VA2A1 B2(B1) VB2B1
P21
2
1
Vp2=Vp1≠0 Vp2=Vp1=0
特点: ①该点涉及两个构件。 ②绝对速度相同,相对速度为零。(重合点) ③相对回转中心。 P13 2、瞬心数目 1 2 3 若机构中有n个构件,则 ∵每两个构件就有一个瞬心 ∴根据排列组合有 N=n(n-1)/2 构件数 瞬心数 4 6 5 10 6 15 8 28
P12 P23
3、机构瞬心位置的确定
(1)直接观察法 (利用定义) 适用于求通过运动副直接相联的两构件瞬心位置。
P12 P12 2 ∞ 1 n 1 2 n
1
2
1
2
P12
t
t
V12
(2)三心定律
定义:三个彼此作平面运动的构件共有三个瞬 心,且它们位于同一条直线上。此法特别适用 于两构件不直接相联的场合。
b)高副机构 已知构件2的转速ω 2,求构件3的角速度ω 3 。 解: 用三心定律求出P23 。
求瞬心P23的速度 :
n
P12 ω 2
1 2
VP23=μ l(P23P12)· ω2
VP23=μ l(P23P13)· ω3 ∴ω 3=ω 2· (P13P23/P12P23) 方向: CCW, 与ω 2相反。
西工大版机械原理第3章

1 2
1
2 A(A1A2)
VA2、VA1为两构件上A点的绝对速度,VA2A1为相对速度
VA2A1方向为平行于导路方向。
(2)加速度分析
r aA2 aA1 ak a A2 A1 A2 A1
1 2
aA2、aA1为两构件上A点的绝对加速度
科氏加速度: a k A2 A1 21VA2 A1, 方向为将相对速度VA2 A1沿1转过90
大小 方向
? ⊥C P14 ?
?
⊥AB ⊥BC
vS 4 vC vS 4C vE vS 4 E
vS 4 vB vCB vS 4C vE vS 4 E
大小 方向
(1)用瞬心法确定C点方向
⊥AB
?
⊥CB
?
⊥SE
借助速度瞬心法
VC ?
= VB
+ VCB
P36 E • C G 3 5 A D 2 1 4 F B 6 即:VS3 = VB
vK 3 vK 2 2lOK
(2)用影像原理求vB
⊥OK
vC vB vCB
vB v pb
vC v pc 6 lCD lCD
例 3 – 3 图示为6杆(Ⅲ级)机构,已知2 ,作速度多边形
d
c p
b (2)利用特殊点S减少未知量
S
p14
e
vC vB vCB
n t k r aB3 aB 3 aB3 aB2 aB3B2 aB3B2
大小: 方向:
2 3 lBC
?
⊥BC
2 1 l AB
23VB3B 2
?
' ' b( ) 2 b1
机械原理课件瞬心例题

在设计过程中,合理利用瞬心,可以调整机构的动态响应, 降低外部激励对机构的影响,从而减小振动和冲击。
实现机构的轻量化和紧凑化
通过优化瞬心的位置和数量,可以减小机构的整体尺寸, 实现机构的轻量化和紧凑化设计。
瞬心的合理配置有助于减少机构中的运动副数量和传动元 件,从而减小机构的重量和体积,实现轻量化和紧凑化的 目标。
随着计算机技术的发展, 越来越多的机械设计软件 提供了计算机辅助计算瞬 心的功能。
具体步骤
在软件中输入机构的参数 和运动条件,软件会自动 计算出机构的瞬心位置。
应用场景
广泛应用于各种复杂机械 系统的设计和分析中,大 大提高了设计效率。
BIG DATA EMPOWERS TO CREATE A NEW ERA
04
瞬心的计算方法
BIG DATA EMPOWERS TO CREATE A NEW
ERA
平面机构的瞬心计算方法
瞬心定义
应用场景
平面机Байду номын сангаас中,瞬时速度为零的点称为 瞬心。
在平面连杆机构、凸轮机构等中,瞬 心的计算对于确定机构的运动特性十 分重要。
瞬心计算公式
对于两构件,若它们的相对速度为零 ,则它们之间的相对瞬心位置可以通 过求解相对速度的叉乘为零的方程得 到。
详细描述
在球面机构中,如球面齿轮或球面蜗 杆,瞬心通常位于球心。通过分析瞬 心位置,可以确定机构在运动过程中 的位置和运动轨迹,有助于优化机构 的设计和运动性能。
瞬心在万向联轴器中的应用
总结词
万向联轴器中的瞬心点是连接两轴的点 ,对于实现两轴间的等角传递运动至关 重要。
VS
详细描述
在万向联轴器中,瞬心是连接两轴的点, 它确保了两轴间的等角传递运动。通过合 理选择瞬心的位置,可以优化万向联轴器 的运动性能,减小传动误差,提高传动效 率。
最新机械原理--速度瞬心习题知识讲解
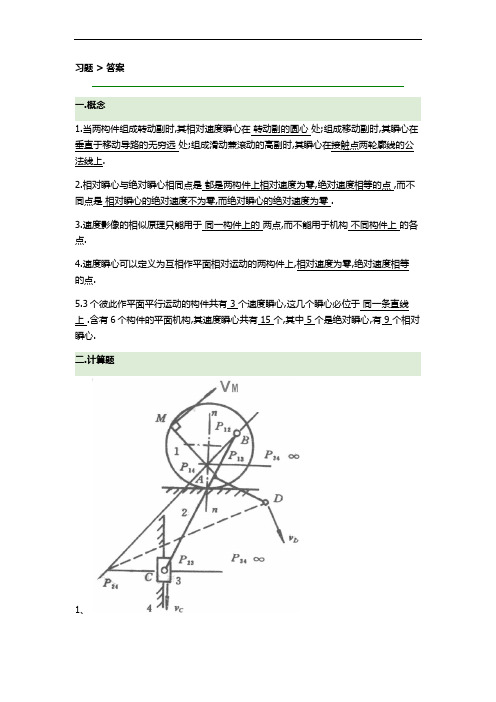
习题 > 答案一.概念1.当两构件组成转动副时,其相对速度瞬心在转动副的圆心处;组成移动副时,其瞬心在垂直于移动导路的无穷远处;组成滑动兼滚动的高副时,其瞬心在接触点两轮廓线的公法线上.2.相对瞬心与绝对瞬心相同点是都是两构件上相对速度为零,绝对速度相等的点 ,而不同点是相对瞬心的绝对速度不为零,而绝对瞬心的绝对速度为零 .3.速度影像的相似原理只能用于同一构件上的两点,而不能用于机构不同构件上的各点.4.速度瞬心可以定义为互相作平面相对运动的两构件上,相对速度为零,绝对速度相等的点.5.3个彼此作平面平行运动的构件共有 3 个速度瞬心,这几个瞬心必位于同一条直线上 .含有6个构件的平面机构,其速度瞬心共有 15 个,其中 5 个是绝对瞬心,有 9 个相对瞬心.二.计算题1、2.关键:找到瞬心P366 Solution:The coordinates of joint B arey B=ABsinφ=0.20sin45°=0.141mx B=ABsinφ=0.20sin45°=0.141mThe vector diagram of the right Fig is drawn by representing the RTR (BBD) dyad.The vector equation, corresponding to this loop, is written asrB+r -rD =0 orr =r D-rBWherer =BD and r=γ.When the above vectorial equation is projected on the x and y axes, two scalar equations are obtained: r*cos(φ3+π)=x D -xB=-0.141mr*sin(φ3+π)=y D -y B =-0.541mAngle φ3 is obtained by solving the system of the two previous scalar equations:tgφ3=141.0541.0 ⇒φ3=75.36°The distance r isr=)cos(3πϕ+-B D x x =0.56mThe coordinates of joint C arex C =CDcosφ3=0.17m y C =CDsinφ3-AD=0.27mFor the next dyad RRT (CEE), the right Fig, one can write Cecos(π- φ4)=x E - x C Cesin(π- φ4)= y E - y CVector diagram represent the RRT (CEE) dyad.When the system of equations is solved, the unknowns φ4 and x E are obtained: φ4=165.9° x E =-0.114m7. Solution: The origin of the system is at A, A≡0; that is,x A =y A =0.The coordinates of the R joints at B are x B =l 1cosφ y B = l 1sinφFor the dyad DBB (RTR), the following equations can be written with respect to the sliding line CD:mx B - y B +n=0 y D =mx D +nWith x D =d 1, y D =0 from the above system, slope m of link CD and intercept n can be calculated:m=111cos sin d l l -ϕϕ n=ϕϕcos sin 1111l d l d -The coordinates x C and y C of the center of the R joint C result from the system of two equations:y C =mx C +n=ϕϕϕϕcos sin cos sin 1111111l d l d x d l l C -+-,(x C- xD )2+(y C- y D )2=l 23Because of the quadratic equation, two solutions are abstained for x C and y C.For continuous motion of the mechanism, there are constraint relations for the Choice of the correct solution; that is x C< x B< x D and y C>0For the last dyad CEE (RRT), a position function can be written for joint E:(x C-x E)2+(y C-h)2=l24The equation produces values for x1E and x2E, and the solution x E >x C is selected for continuous motion of the mechanism.枣元中心幼儿园教学活动评课记录。
机械原理第一章速度瞬心

(2) 当两构件组成转动副时,转动副的中心便是它们的瞬心;
(3) 当两构件组成移动副时、所以其瞬心位于导路垂线的无穷远处; (4)当两构件组成纯滚动高副时,接触点就是其瞬心, (3)当两构件组成滑动兼滚动的高副时,其瞬心应位于过接触点的公法线上 (4)不直接接触的各个构件,其瞬心可用三心定理定理是:作相对平面运动 的三个构件共有三个瞬心.这三个瞬心位于同—条直线上。
2.齿轮或摆动从动件凸轮机构 Vp12=w1Lp12p13=w2Lp12p23 组成高副的两构件,其角速度连 心线被接触点公法线所分割 的两线段长度成反比。
• w1 Lp13p12 =V2 • Lp13p12=V2/w1
1-4 速度瞬心及其在机构速度分析上的应用
一.速度瞬心及其求法 速度瞬心:(瞬时回转中心,瞬心,同速点) 由理论力学可知,当构件1相对构件2作平面运动时,在任一瞬时,它们 的运动都可以看作是绕某一重合点的相对转动,该重合点P1s称为它们的瞬 时速度中心,简称为瞬心。瞬心是相对运动两构件上相对速度为零的重合 点。 如果这两构件之一是静止的,则其瞬心被称为绝对瞬心,即运动构件 上瞬时绝对速度为零的点。如果这两构件都是运动的,则其瞬心被称为相 对瞬心,即两运动构件上瞬时绝对速度相等的重合点。 因此,瞬心是互相作平面相对运动的两构件上的等速重合点。 ★ 若已知平面图形上A、B 两点速度vA 、vB 的方向,
• 例1-8 求图1-21所示铰链四杆机构的瞬心。 • P12,P13,P14-----绝对瞬心,P23,P34,P24------相对瞬心
• 例1—9 求图1—22所示曲柄滑块
机构的瞬心。
二、瞬心在速度分析上的应用
• 1.铰链四杆机构 • Vp24=w4Lp24p14=w2Lp24p12 • W2/w4=P24P14/P12P24 • 两构件的角速度与其绝对瞬心 至相对瞬心的距离成反比、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理--速度瞬心
习题
习题 > 答案
一.概念
1.当两构件组成转动副时,其相对速度瞬心在转动副的圆心处;组成移动副时,其瞬心在垂直于移动导路的无穷远处;组成滑动兼滚动的高副时,其瞬心在接触点两轮廓线的公法线上.
2.相对瞬心与绝对瞬心相同点是都是两构件上相对速度为零,绝对速度相等的点 ,而不同点是相对瞬心的绝对速度不为零,而绝对瞬心的绝对速度为零 .
3.速度影像的相似原理只能用于同一构件上的两点,而不能用于机构不同构件上的各点.
4.速度瞬心可以定义为互相作平面相对运动的两构件上,相对速度为零,绝对速度相等的点.
5.3个彼此作平面平行运动的构件共有 3 个速度瞬心,这几个瞬心必位于同一条直线上 .含有6个构件的平面机构,其速度瞬心共有 15 个,其中 5 个是绝对瞬心,有 9 个相对瞬心.
二.计算题
1、
2.关键:找到瞬心P36
6 Solution:
The coordinates of joint B are
y B=ABsinφ=0.20sin45°=0.141m
x B=ABsinφ=0.20sin45°=0.141m
The vector diagram of the right Fig is drawn by representing the RTR (BBD) dyad. The vector equation, corresponding to this loop, is written as
r B+ r-r D=0 or r=D-B
r= and r=γ.
Where
When the above vectorial equation is projected on the x and y axes, two scalar equations are obtained:
r*cos(φ3+π)=x D -x B =-0.141m
r*sin(φ3+π)=y D -y B =-0.541m
Angle φ3 is obtained by solving the system of the two previous scalar equations:
tgφ3=141.0541
.0 ⇒φ3=75.36°
The distance r is
r=)cos(3πϕ+-B
D x x =0.56m
The coordinates of joint C are x C =CDcosφ3=0.17m y C =CDsinφ3-AD=0.27m
For the next dyad RRT (CEE), the right Fig, one can write
Cecos(π- φ4)=x E - x C Cesin(π- φ4)= y E - y C
Vector diagram represent the RRT (CEE) dyad.
When the system of equations is solved, the unknowns φ4 and x E are obtained: φ4=165.9° x E =-0.114m
7. Solution: The origin of the system is at A, A≡0; that is,
x A =y A =0.
The coordinates of the R joints at B are x B =l 1cosφ y B = l 1sinφ
For the dyad DBB (RTR), the following equations can be written with respect to the sliding line CD:
mx B - y B +n=0 y D =mx D +n
With x D =d 1, y D =0 from the above system, slope m of link CD and intercept n can be calculated:
m=111cos sin d l l -ϕϕ n=ϕϕ
cos sin 1111l d l d - The coordinates x C and y C of the center of the R joint C result from the system of two equations:
y C =mx C +n=ϕϕϕϕcos sin cos sin 111
1111l d l d x d l l C -+-,
(x C - x D )2+(y C - y D )2=l 2
3
Because of the quadratic equation, two solutions are abstained for x C and y C .For continuous motion of the mechanism, there are constraint relations for the Choice of the correct solution; that is x C < x B < x D and y C >0
For the last dyad CEE (RRT), a position function can be written for joint E:
(x C -x E )2+(y C -h)2=l 2
4
The equation produces values for x 1E and x 2E , and the solution x E >x C is selected for continuous motion of the mechanism.。