信捷DP-508、DP-508-L步进驱动器用户手册20130420
信捷产品使用知识

RT----PLC输出类型(R:继电器输出,T:晶体管输出)。
Clock----可选配时钟。
由于控制器如PLC等输出的只是信号,很多负载时不能直接驱动的,如驱动步进电机,就需要在PLC与步进电机之间加驱动器,进行信号的放大和脉冲的分配,以及一些保护等。
信捷的驱动产品包括变频器、步进驱动器和伺服驱动器。
命名规则:
系列名称:OP-文本显示器
MP-触摸显示器
TP/TH/TG-工业触摸屏
尺寸:3-3.7英寸、2-4.7英寸、3-5.7英寸、7-7英寸、8-8英寸、A-10.1/10.4英寸
按键:A-带数字键盘
485通讯:S:支持485通讯
时钟:clock-文本可选配时钟(触摸屏都是标配时钟的)
其他特殊配置:L:单色;
信捷步进驱动器分两相步进驱动器DP504、DP508(A/A-L)、DP708高性能,低价格,外形小巧,操作简便,采用纯正弦电流控制技术,运行平稳,噪声小,适用于多种小型数控设备上,和三相步进驱动器DP5022、DP7022(C),性能稳定,外观精巧,性价比高,采用纯正弦电流控制技术,使电机运行平稳,噪声小,适用于多种数控设备。
在很多场合我们都能见到变频器的身影,如家里的“变频空调”。
众所周知,我国的电网电压为220伏、50赫兹,在这种条件下工作的空调称之为“定频空调”。由于供电频率不能改变,传统的定频空调的压缩机转速基本不变,依靠其不断地“开、停”压缩机来调整室内温度,其一开一停之间容易造成室温忽冷忽热,并消耗较多电能,对设备的使用也有很大影响。而与之相比,“变频空调”变频器改变压缩机供电频率,调节压缩机转速。依靠压缩机转速的快慢达到控制室温的目的,这样不但温度稳定,还避免了压缩机频繁地开开停停所造成的对寿命的衰减,而且耗电量大大下降,实现了高效节能。
信捷XC系列PLC驱动使用说明
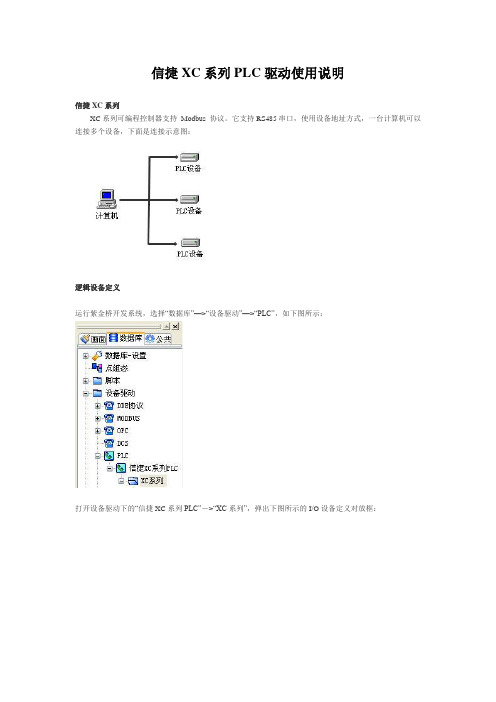
信捷XC系列PLC驱动使用说明信捷XC系列XC系列可编程控制器支持Modbus 协议。
它支持RS485串口,使用设备地址方式,一台计算机可以连接多个设备,下面是连接示意图:逻辑设备定义运行紫金桥开发系统,选择“数据库”—>“设备驱动”—>“PLC”,如下图所示:打开设备驱动下的“信捷XC系列PLC”->“XC系列”,弹出下图所示的I/O设备定义对放框:设备名称:该I/O设备的名称,通过它,可以组态数据连接等。
数据更新周期:数据多长时间更新一次。
实际的更新周期取决于设备和计算机通讯的速度,有可能大于该周期,但是最小不会小于该周期。
超时时间:当与设备进行通讯时,如果超过超时时间没有应答,则该次数据通讯的数据作废,又开始下一次数据通讯。
如果一个设备连续超时3次,则认为该设备进入到故障状态。
故障后恢复查询/周期:当设备发生故障后,为了提供通讯速度,不能按正常的调度时间进行调度,该周期是每隔多长时间查询一次设备,看其是否从故障状态中恢复。
故障后恢复查询/最长时间:当设备发生故障后,如果在最长时间内不能恢复正常,则以后不再查询其状态,即使其已经恢复正常。
设备地址:PLC设备的地址。
接下来定义串口的波特率等参数:最后一步弹出如下图所示对话框:包的最大长度:在分包时,决定一次最多读取的数据量。
数据存储格式:有4种格式,即:“低-次低- 高-次高”、“次低-低- 次高-高”、“高-次高- 低-次低”、“次高-高- 次低-低”,16位与32默认都是第一种。
命令支持:当选中6号命令与16号命令,则采用前者。
.非标准协议支持:支持每个寄存器4个字节数据长度的设备。
组点连接在紫金桥组点连接时,弹出如下图所示的对话框:元件类型:支持的物理设备元件;可编程控制器内部软元件编号与对应的Modbus地址编号入下表示:数据类型:从元件中读取的数据的类型,包括:16位无符号整数、16位有符号整数、32位有符号整数、32位有符号整、32位浮点数、字符型、8位无符号整数、8位有符号整数。
SD200-50、75伺服驱动器用户手册
步进伺服控制器使用说明书

可编程步进伺服电机控制器快速使用手册型号:SM1P(单轴)版本V1.0一、快速使用说明1、接线线路图2、应用案例- 输入按键控制电机正转、反转(点动,电机转动固定圈数)。
1)实现功能:要求输入X0 接一个按钮开关。
开关闭合一次电机以300转/分的速度正转10 圈,再以200转/分的速度反转10 圈。
停止。
等待再次开关闭合,重复上述过程。
2)接线方法:输入X0接触发开关按钮的一端,触发开关的另一端接到公共端XCOM。
PUL-连接步进电机驱动器PUL-,DIR-连接步进电机驱动器DIR-,步进电机驱动器的PUL+和DIR+连接+5V。
驱动器细分设置800,表示电机转动1圈需要800个脉冲。
3)备注:检测开关按钮输入或者是其他传感器输入时,使用“输入”指令。
在程序中[N01]行我们使用了闭合触发。
但是在[N07]中我们使用了等待输入的断开,因为我们的要求是开关按一次,动作一次的目的。
因此需要检测开关按钮是否放开的,防止程序跳转回去继续运行出现误动作的情况。
注意:圈数、mm、cm、m、xx(自定义单位)等单位是在单位设置界面中的设置。
二、产品概述中文填表可编程步进伺服电机控制器,功能灵活,结合步进电机或者伺服电机、输入开关量、输出开关量控制的“一体机”方案。
液晶显示、方便中文指令编程,步进、伺服电机带加减速功能,支持多线程,可同时运行2组任务,可存储8组程序。
可以实现各种复杂定位功能和非定位功能,适配所有电机和驱动器,可以实现正转、反转控制功能,速度可调,距离可调,圈数可调。
该控制器的屏幕显示界面具有简洁、操作方便等特点。
行业应用广泛,应用于冲压、焊接、切割、剪裁、钻孔、喷涂、送料、搬运、点胶、包装、生产线,结合步进伺服控制、感应开关输入、气缸、继电器控制一体的自动化设备。
1、功能说明自动:自动运行、单步运行、上电自动运行、使能运行、增量移动、坐标移动手动:电机正反转、回机械零、回程序零、输出口控制程序:程序的编辑、插入、删除、保存、显示屏用户参数页修改核心参数,双任务可同时运行,每一个任务最大指令99 行,其中任务0可以存储8组程序,任务1可以存储1组程序(后台任务,处理紧急停止等动作)。
信捷PLC (用户手册)
信捷PLC (用户手册)信捷PLC (用户手册)1. 概述信捷PLC(可编程逻辑控制器)是一种用于工业自动化控制系统的电子设备。
它的主要功能是接收输入信号,根据预设的逻辑和程序进行处理,并输出相应的控制信号,用于控制各种设备和系统的运行。
本用户手册旨在帮助用户了解和正确使用信捷PLC。
2. 系统要求在开始使用信捷PLC之前,请确保您满足以下系统要求:- 电源电压:输入电压范围为XXVAC-XXVAC,频率范围为XXHz-XXHz。
- 运行环境:温度范围为XX℃-XX℃,湿度范围为XX%-XX%。
- 现场设备:确保连接的设备和传感器与信捷PLC兼容,并按照用户手册的指导正确安装和连接。
3. 硬件组成3.1 主控模块信捷PLC的主控模块是PLC的核心组件,通常由以下部分组成:- CPU模块:负责处理逻辑和控制程序,采用高性能的处理器,具有快速的运算速度和响应能力。
- 电源模块:为PLC提供电源供应,并能实现电源的过载和短路保护。
- 通信模块:用于与其他设备和系统进行通信,支持多种通信接口和协议。
3.2 输入/输出模块输入/输出模块是信捷PLC与外部设备和传感器之间的接口,用于接收和输出控制信号。
它通常包括数字输入模块、模拟输入模块、数字输出模块和模拟输出模块等。
4. 软件操作4.1 编程软件信捷PLC的编程软件提供了一个直观的界面,用于编写和编辑控制程序。
用户可以使用不同的编程语言,如梯形图、指令表等,来表达逻辑和控制流程。
4.2 程序下载和运行编写好的控制程序可以通过编程软件将其下载到信捷PLC的主控模块中。
一旦程序下载完成,PLC即可根据程序的逻辑和条件进行运行,控制各个输入和输出模块的状态。
5. 故障排除与维护5.1 故障排除在使用信捷PLC过程中,可能会遇到一些故障和问题。
用户可以根据以下方法进行排除:- 检查电源供应是否正常工作,确保电压和频率在规定范围内。
- 检查输入/输出模块的连接是否正确,确定信号传输是否正常。
【步进电机及驱动器控制器】双轴控制器使用手册

1
双轴运动控制器操作手册
目录
一 与外部驱动器及IO (输入输出)接线图 (4)
二 用户管理操作 (5)
三 系统参数设置 (7)
四 IO (输入输出)设置 (8)
五 系统自检操作 (11)
六 手动操作
(14)
七编程操作 (15)
八自动执行 (18)
九指令详解 (20)
十电子齿轮计算及公式 (22)
十一编程案例 (25)
十二常见问题及处理 (29)
2
3
一与外部驱动器及IO(输入输出)接线图
1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线)
2.IO(外部开关及继电器)的接线图(红色线为1号线)
4
注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二用户管理操作
注意:所有重要参数只有用户登录以后才可修改保存。
防止他人随意更改参数,影响加工质量。
从主画面进入参数设置,并进入用户管理,进行密码输入。
5。
信捷plc编程手册[1]
![信捷plc编程手册[1]](https://img.taocdn.com/s3/m/20948a2a192e45361066f5b9.png)
信捷科技电子有限公司
资料编号 PC10 20100415 3.3
信捷电子
前言
—————————————————
XC 系列可编程控制器
用户手册[基本指令篇]
(XC1/XC2/XC3/XC5/XCM/XCC)
编程方式概述
—————————————————
1 编程方式概述............................................................................................................................... 1
1-1.可编程控制器的特点 ................................................................................................................. 3 1-2.编程语言 .................................................................................................................................... 4 1-2-1.种类 ..................................................................................................................................... 4 1-2-2.互换性 ................................................................................................................................. 4 1-3.编程方式 .................................................................................................................................... 5
步进电机驱动器使用手册说明书

步进电机驱动器使用手册目录1安全事项 (2)2产品外形 (4)2.1产品外形 (4)3接口定义 (5)3.1电机、电源接口C N1 (5)3.1.1两相步进电机接线 (5)3.1.2五相步进电机接线 (6)3.2控制接口C N2 (7)3.2.1脉冲(P u l)信号/上限位信号 (9)3.2.2方向(D i r)信号/下限位信号 (9)3.2.3回零(Z e r o)信号/原点信号 (9)3.2.4脱机/使能(F r e e/E n a b l e)信号 (9)3.2.5到位(I N P)信号 (10)3.2.6就绪(R D Y)信号 (11)3.2.7接口电压 (11)3.3编码器接口C N3 (13)3.4U S B接口C N4 (14)3.5M o d b u s接口C N5 (15)4L E D指示 (16)4.1状态指示L E D (16)4.2通讯指示L E D (18)5性能参数 (18)5.1机械参数 (18)5.2安装尺寸 (19)6应用指南 (20)6.1安装准备 (20)6.2机械安装 (20)6.3电气安装 (21)6.4日常维护 (21)6.5注意事项 (21)6.5常见问题 (22)为保障使用者人身安全,保护设备正常使用,请务必阅读并遵守本章的安全事项。
在操作时违反本事项所示要求,可能会导致人员重伤或者死亡。
在操作时违反本事项所示要求,可能会引起驱动器永久损坏及附加事故。
谨防触电,爆炸或其他危险禁止在易爆、易燃或腐蚀性环境使用本产品;禁止开启产品外壳;驱动器带电时内部电压可能超过36VDC,驱动器和电机都必须接安全保护地线;驱动器内部电压不会瞬间释放,必须先切断电源,等指示灯熄灭后才能进行插拔、接线、设置、测量、搬动等人工操作;禁止带电插拔;驱动器故障时温度可能很高,必须先切断电源,等下降至安全温度后才能进行人工操作;驱动器应用于直接涉及人身安全的设备,必须配备人身安全防范措施;驱动器或设备故障时可能存在火灾隐患,必须配备消防安全防范措施。
步进电机控制器说明手册
步进电机,伺服电机可编程控制器KH-01使用说明一、系统特点•控制轴数:单轴;•指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);•最高输出频率:40KHz(特别适合控制细分驱动器);•输出频率分辨率:1Hz;•编程条数:99条;•输入点:6个(光电隔离);•输出点:3个(光电隔离);•一次连续位移范围:—7999999~7999999;•工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态;•升降速曲线:2条(最优化);•显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;•自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止;•手动运行功能:可调整位置(手动的点动速度和点动步数可设定);•参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;•程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判断功能;•回零点功能:可双向自动回到零点;•编程指令:共14条指令;•外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作;•电源:AC220V (电源误差不大于±15%)。
一、前面板图前面板图包括:1、八位数码管显示2、六路输入状态指示灯3、三路输出状态指示灯4、CP脉冲信号指示灯5、CW方向电平指示灯6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:脉冲————步进脉冲信号方向————电机转向电平信号+5V前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
信捷PLC (用户手册)

XC系列编程工具XCP Pro(V3.1)用户手册信捷科技电子有限公司资料编号PC 08 20090204 3.1目录1、使用说明 (3)1-2. 安装步骤 (4)1-3. 卸载步骤 (6)2、基本操作 (9)2-1. XCP Pro的打开和关闭 (10)2-2. 创建或打开工程 (11)2-3. PLC类型的添加和删除 (12)3、编辑环境的基本介绍 (14)3-1. 界面基本构成 (15)3-2. 常规工具栏 (16)3-3. PLC工具栏 (17)3-4. 梯形图输入栏 (17)3-5. 其他 (18)3-6. 菜单栏介绍 (19)3-6-1. “文件” (19)3-6-2. “编辑” (20)3-6-3. “查找\替换” (20)3-6-4. “显示” (21)3-6-5. “PLC操作” (21)3-6-6. “PLC设置” (23)3-6-7. “选项” (23)3-6-8. “窗口” (23)3-6-9. “帮助” (23)3-7. 工程栏 (24)3-8. 快捷键介绍 (24)4、简单功能的实现 (25)4-1. 联机 (26)4-2. 程序的上载、下载及PLC状态控制 (27)4-3. PLC初值设定及数据的上传、下载 (28)4-3-1. 初值设定 (28)4-3-2. 数据的上传、下载 (29)4-4. PLC以及模块信息的查询 (29)4-4-1. PLC本体信息 (30)4-4-2. BD板信息 (30)4-4-3. 扩展模块信息 (30)4-4-4. 扫描周期 (31)4-4-5. 时钟信息 (31)4-4-6. 错误信息 (31)4-5. PLC的初始化 (32)4-6. 程序加锁/解锁 (32)4-6-1. 密码设置 (32)4-6-2. 加锁/解锁 (33)4-6-3. 默认解密密码设置 (33)4-7. 打印 (34)5、编程操作 (35)5-1. 编程方式 (36)5-2. 指令符号的输入 (37)5-2-1. 指令提示 (37)5-2-2. 输入接点 (37)5-2-3. 输入线圈 (38)5-2-4. 特殊指令 (41)5-3. 梯形图的编辑 (45)5-3-1. 横线与竖线的操作 (45)5-3-2. 接点与行的操作 (46)5-3-3. 注释的编辑 (47)5-3-4. 梯形图的复制和剪切 (50)5-3-5. 梯形图指令的管理 (51)5-4. 相关配置 (53)5-4-1. PLC串口设置 (53)5-4-2. BD板设置 (54)5-4-3. Can-bus通讯的配置 (54)5-4-4. 断电区域保存的设置 (56)5-4-5. 扩展模块的设置 (56)5-4-6. I/O对应表的设置 (57)5-4-7. 通讯方式设置 (58)5-4-8. TCP/IP设置 (60)5-4-9. 函数功能块列表 (60)5-4-10. 梯形图颜色设置 (61)5-5. 软元件监控 (62)5-5-1. 软元件的注释 (62)5-5-2. 自由监控 (62)5-5-3. 数据监控 (63)5-5-4. 梯形图监控 (63)5-5-5. 信息栏 (64)5-5-6. 状态栏 (65)1、使用说明本章重点说明XC上位机软件XCP Pro的安装系统要求、安装及卸载步骤。
信捷伺服手册
三菱伺服说明书

三菱伺服说明书三菱伺服说明书篇一:三菱伺服报警代码三菱伺服说明书 MR-J2-B伺服放大器手册(英文)8 - 1 Alarm and warning lists 报警和警告名单When a fault occurs during operation, the corresponding alarm or warning is displayed. If any alarm or warning has occurred, refer to Section 8.2 or 8.3 and take the appropriate action.AlarmsWarnings:当故障发生在操作过程中,相应的报警或显示警告。
如果任何警报或警告发生,请参阅第8.2或8.3,并采取适当的行动。
报警警告Display Name 显示名称10 Undervoltage10欠压11 Board error 1 11 局错误112 Memory error13 Clock error15 Memory error 216 Encoder error 117 Board error 218 Board error 320 Encoder error 224 Ground fault25 Absolute position erase30 Regenerative error31 Overspeed32 Overcurrent33 Overvoltage34 CRC error35 Command F T error36 Transfer error37 Parameter error46 Servo motor overheat50 Overload 151 Overload 252 Error excessive8E RS-232C error88 Watchdog92 Open battery cable warning96 Zero setting errorE0 Excessive regenerative load warningE1 Overload warningE3 Absolute position counter warningE4 Parameter warningE6 Servo emergency stopE7 Controller emergency stopE9 Main circuit off warning12内存错误1 14时钟误差 15 内存错误2 16 编码器错误117局错误2 18局的错误3 20编码器错误2 24接地故障 25绝对位置擦除 3 0再生错误31超速32过流33过压保护 34 CRC错误 35指挥F t误差 36传输错误 37参数错误 46伺服电机过热 50超载1 51超载2 52错误过多 8E型的RS - 232错误88看门狗92打开电池电缆警告96零设定错误过度负荷的 E0再生警告E1超载警告E3展绝对位置计数器警告E4类参数警告E6伺服紧急停止 E7的紧急停止控制器 E9主回路关闭警告三菱伺服说明书篇二:最新三菱PLC编程最新手册三菱PLC 编程手册目录第一章 FX1N PLC编程简介1.1 FX1N PLC 简介 (1)1.1.1 FX1N PLC 的提出 (1)1.1.2 FX1N PLC 的特点 (1)1.1.3 FX1N PLC 产品举例 (1)1.1.4 关于本手册 (1)1.2 编程简介 (1)1.2.1 指令集简介 (2)1.2.2 资源集简介 (7)1.2.3 编程及应用简介 (9)第二章基本逻辑指令说明及应用2.1 基本逻辑指令一览表 (10)2.1 [LD],[LDI],[LDP],[LDF],[OUT,指令 (10)2.2.1 指令解说 (10)2.2.2 编程示例 (10)2.3[AND],[ANI],[ANDP],[NDF,指令 (11)2.3.1 指令解说 (11)2.3.2 编程示例 (12)2.4 [OR],[ORI],[ORP],[ORF,指令 (13)2.4.1 指令解说 (13)2.4.2 编程示例 (13)2.5 [ANB],[ORB,指令 (14)2.5.1 指令解说 (14)2.5.2 编程示例 (14)2.6 [INV,指令 (15)2.6.1 指令解说.............................. (15)2.6.2 编程示例 (15)2.7 [PLS],[PLF,指令 (16)2.7.1 指令解说 (16)2.7.2 编程示例 (17)2.8 [SET],[RST]指令 (17)2.8.1 指令解说 (17)2.8.2 编程示例 (18)2.9 [NOP],[END]指令 (18)2.9.1 指令解说 (18)2.9.2 编程示例 (18)2.10 [MPS],[MRD],[MPP] 指令 (18)2.10.1 指令解说 (18)2.10.2 编程示例 (19)2.11[MC],[MCR]指令 (21)2.11.1指令解说 (21)2.11.2 编程示例 (21)第三章步进顺控指令说明及应用3.1步进顺控指令说明 (22)3.1.1 指令解 (22)3.1.2 编程示例 (25)3.2 步进顺控指令应用 (25)3.2.1 单一流程示例 (25)3.2.2 选择性分支与汇合示例 (26)3.2.3 并行分支与汇合示例 (27)3.2.4 循环和跳转示例 (29)第四章功能指令说明及应用4.1 功能指令一览表 (31)4.2 程序流程 (33)4.2.1 条件跳转[CJ] (33)4.2.2 子程序调用[CALL] (35)4.2.3 子程序返回[SRET] (35)4.2.4 主程序结束[FEND] (36)4.2.5 循环范围开始,FOR] (37)4.2.6 循环范围结束「NEXT] (37)4.3 传送与比较 (38)4.3.1 比较指令[CMP] (39)4.3.2 区域比较,ZCP] (40)4.3.3 传送指令[MOV] (41)4.3.4 反向传送,CML] (43)4.3.5 BCD 转换,BCD] (44)4.3.6 BIN 转换,BIN] (45)4.4 四则逻辑运算 (46)4.4.1 BIN 加法运算[ADD] (46)4.4.2 BIN 减法运算[SUB] (47)4.4.3 BIN 乘法运算[MUL] (48)4.4.4 BIN 除法运算,DIV] (49)4.4.5 BIN 1 [INC]................................... .. (50)4.4.6 BIN 减1[DEC] (50)4.4.7 逻辑与[WAND] (51)4.4.8 逻辑或[WOR] (51)4.4.9 逻辑异或[WXOR] (52)4.4.10 求补,NEG] (53)4.4.11 BIN 开方运算[SQR] (53)4.5 循环与移位 (54)4.5.1 循环右移[ROR] (54)4.5.2 循环左移[ROL] (55)4.5.3带进位循环右移,RCR] .............................................. (56)4.5.4 带进位循环左移[RCL] (58)4.6 浮点数运算 (59)4.6.1 二进制浮点数比较「DECMP] (59)4.6.2二进制浮点数区域比较[DEZCP] (60)4.6.3 二进制浮点数转十进制浮点数[DEBCD] (61)4.6.3 十进制浮点数转二进制浮点数[DEBIN] (62)4.6.5 二进制浮点数加法[DEADD] (62)4.6.6 二进制浮点数减法[DESUB] (63)4.6.7 二进制浮点数乘法「DEMUL] (64)4.6.8 二进制浮点数除法「DEDIV] (65)4.6.9 二进制浮点数开方「DESQR] (66)4.6.10 二进制浮点数转BIN 整数变换「INT] (67)4.6.11 BIN 整数转二进制浮点数「FLT] (68)4.7 触点比较指令 (69)4.7.1 接点比较指令「LD※, (69)4.7.2 接点比较指令「AND※, (70)4.7.3接点比较指令「OR※, (72)4.8 功能指令的基本规则 (73)4.8.1 (功能指令的表示与执行形式................................ . (73)4.8.2 功能指令内的数值处理 (75)4.8.3 利用变址寄存器的操作数修改 (77)第五章资源说明及应用5.1变址寄存器V 、Z 说明及应用 (80)5.1.1 变址寄存器V 、Z 说明 (80)5.1.2 变址寄存器在梯形图中的应用 (80)5.1.3 使用变址功能的注意事项 (81)5.2 输入输出继电器X 、Y 说明及应用 (82)5.2.1 输入输出继电器X 、Y 说明 (82)5.2.2输入输出继电器应用 (83)5.3 辅助中间继电器M 说明及应用 (85)5.3.1 辅助中间继电器M 说明 (85)5.3.2 辅助中间继电器M 应用 (85)5.4 状杰继申器S 说明及应用 (87)5.4.1 状态继电器S 说明 (87)5.4.2 状态继电器S 应用 (88)5.5 定时器T 说明及应用 (88)5.5.1 定时器T 说明 (88)5.5.2 定时器T 应用...................................................905.6计数器C 说明及应用 (92)5.6.1 16 bit 计数器C 说明............................................925.6.2 32 bit 计数器C 说明............................................935.6.3 16 bit 计数器C 应用............................................955.6.4 32 bit 计数器应用 (96)5.7数据寄存器D 说明及应用 (97)5.7.1 数据寄存器D 说明...............................................975.7.2 数据寄存器D 应用...............................................995.8程序位置指针P 说明及应用 (100)5.8.1 程序位置指针P 说明 (100)5.8.2 程序位置指针P 应用 (100)5.9常数标记K 、H 详细说明 (102)5.9.1 常数标记K (102)5.9.2 常数标记H (103)5.10 特殊软元件说明 (103)第六章 PID指令说明及应用6.1 PID 运算 (104)6.1.1............................................................... ..1046.1.2 应用示例 (110)第一章FX1N PLC 编程简介1.1 FX1N PLC 简介1.1.1 FX1N PLC 的提出基于以下观点,提出FX1N PLC 的概念:? 、软件和硬件独立设计。
信捷PLC与伺服驱动器调试
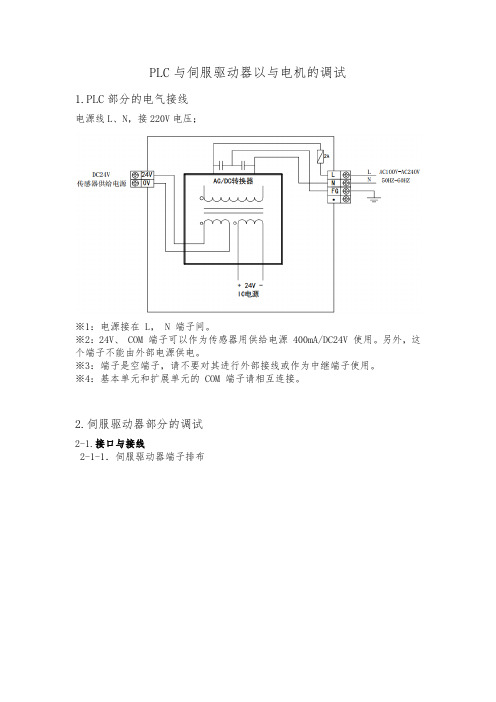
PLC与伺服驱动器以与电机的调试1.PLC部分的电气接线电源线L、N,接220V电压;※1:电源接在 L, N 端子间。
※2:24V、 COM 端子可以作为传感器用供给电源 400mA/DC24V 使用。
另外,这个端子不能由外部电源供电。
※3:端子是空端子,请不要对其进行外部接线或作为中继端子使用。
※4:基本单元和扩展单元的 COM 端子请相互连接。
2.伺服驱动器部分的调试2-1.接口与接线2-1-1.伺服驱动器端子排布2-1-2. 信号端子分类与其功能编号名称功能接线1 P- 脉冲输入PLC脉冲输出短2 P+24V 集电极开路接入+24V3 D- 方向输入PLC输出端4 D+24V 集电极开路接入+24V2-1-3. 主电路端子与说明2-1-4.标准接线实例2-2.伺服驱动器的参数设置2-2-1.操作面板的使用通过对面板操作器的基本状态进行切换,可进行运行状态的显示、参数的设定、辅助功能运行、报警状态等操作。
按STATUS/ESC 键后,各状态按以下图显示的顺序依次切换。
※状态: bb 表示伺服系统处于空闲状态; run 表示伺服系统处于运行状态。
※参数设定 PX-##:第一个 X 表示组号,后面两个 X 表示该组下的参数序号。
※监视状态 U- ##: ## 表示监控参数序号;※辅助功能 FX-##:第一个 X 表示组号,后面两个 X 表示该组下的参数序号;※报警状态 E-##X: ##X 表示报警序号。
2-2-2.控制模式的选择2-2-3.基本功能的设定2-2-4.参数设定举例举例设置参数 P3-09 的容由 2000 变更为 3000 时的操作步骤。
1. 按下 STATUS/ESC 键,切换到参数设定状态,按 ENTER 键进入该状态。
2. 此时,左数第 2个数码管闪烁,按 INC 键或 DEC 键修改组号,将其改为 3,短按ENTER键确认。
3. 此时,右数两个数码管闪烁,按 INC 键、 DEC 键或 ENTER 键选择序号 9,长按 ENTER 键确认。
伺服PLC编程手册
目录第一章MotionWin内置PLC编程软件1.1使用前准备..............................................1-1 1.2软件使用说明.............................................1-1 1.2.1软件主界面.........................................1-1 1.2.2软件文件操作........................................1-1 1.2.3梯形图设计.........................................1-3 1.2.4联机................................................1-5 1.2.5下载................................................1-6 1.2.6PLC参数............................................1-7 1.2.7PLC通用寄存器......................................1-8 1.2.8PLC报警.............................................1-9 1.2.9伺服参数...........................................1-9 1.2.10伺服状态寄存器....................................1-10 1.2.11伺服报警.........................................1-10 1.3程序转换后,不当的形式转换............................1-11第二章PLC资源表2.1PSDP-XX-X-2-A9-NXXX-M035..........................2-1 2.1.1M寄存器.........................................2-12.1.2P寄存器.........................................2-2 2.1.3伺服状态驱动器..................................2-3 2.1.4特殊功能R寄存器.................................2-4 2.2PSDP-XX-X-8-A9-NXXX-M035.........................2-5 2.2.1M寄存器........................................2-5 2.2.2R寄存器..........................................2-7 2.2.3P寄存器..........................................2-7 2.2.4伺服状态寄存器...................................2-7 2.2.5特殊功能R寄存器..................................2-8 2.3PSDP-XX-X-3-A9-NXXX-M09..........................2-9 2.3.1M寄存器........................................2-9 2.3.2R寄存器........................................2-11 2.3.3P寄存器........................................2-11 2.3.4伺服状态寄存器.................................2-11 2.3.4特殊功能R寄存器................................2-12第三章功能指令3.1通用功能指令........................................3-1 3.1.1设定.............................................3-1 3.1.2重置.............................................3-1 3.1.3计时器...........................................3-13.2算术运算指令........................................3-3 3.2.1加法运算.........................................3-3 3.2.2减法运算.........................................3-3 3.2.3乘法运算.........................................3-4 3.2.4除法运算.........................................3-4 3.3浮点运算指令........................................3-4 3.3.1浮点数值搬移......................................3-4 3.3.2浮点数转整型......................................3-5 3.3.3浮点数加法.......................................3-5 3.3.4浮点数减法.......................................3-6 3.3.5浮点数乘法.......................................3-6 3.3.6浮点数除法.......................................3-6 3.3.7浮点数值比较.....................................3-7 3.4搬移指令.............................................3-7 3.4.1数据搬移........................................3-7 3.4.2数据反相搬移......................................3-8 3.4.3位元数据读取......................................3-8 3.4.4位元数据写入......................................3-8 3.4.5位元数据搬移......................................3-9 3.4.6位数(Nibble)搬移................................3-9 3.4.7位元组(Byte)搬移.................................3-103.4.9位元组(Byte/Word)对换........................3-11 3.5逻辑运算指令........................................3-11 3.5.1逻辑与(AND)运算.................................3-11 3.5.2逻辑或(OR)运算...................................3-12 3.5.3逻辑异或(XOR)运算................................3-12 3.5.4逻辑同或(XNR)运算...............................3-13 3.6比较指令............................................3-13 3.6.1比较............................................3-13 3.7移位指令............................................3-13 3.7.1位元移位........................................3-14 3.7.2向左移位........................................3-14 3.7.3向右移位.......................................3-14 3.7.4向左旋转........................................3-15 3.7.5向右旋转.......................................3-15 3.8运动控制指令.......................................3-16 3.8.1绝对位置清零...................................3-16 3.8.2点动............................................3-16 3.8.3找原点........................................3-17 3.8.4PID............................................3-21 3.8.5ELPCM.........................................3-27 3.8.6转矩控制.......................................3-283.8.8DA输出.........................................3-29 3.8.9定位模式0......................................3-30 3.8.10定位模式1....................................3-31 3.8.11电子凸轮(CAM)..............................3-32 3.9流程控制指令.......................................3-33 3.9.1子程序进入.....................................3-33 3.9.2子程序返回.....................................3-34 3.9.3呼叫(Call).....................................3-34 3.9.4程序终止........................................3-34 3.10报警指令.........................................3-35 3.10.1检测报警.......................................3-35 3.10.2设置报警.......................................3-35第一章:MotionWin内置PLC编程软件◆标准的WINDOWS界面,界面友好,操作方便。
信捷PLC与伺服驱动器调试教学教材

信捷P L C与伺服驱动器调试PLC与伺服驱动器以及电机的调试1.PLC部分的电气接线电源线L、N,接220V电压;※1:电源接在 L, N 端子间。
※2:24V、 COM 端子可以作为传感器用供给电源 400mA/DC24V 使用。
另外,这个端子不能由外部电源供电。
※3:端子是空端子,请不要对其进行外部接线或作为中继端子使用。
※4:基本单元和扩展单元的 COM 端子请相互连接。
2.伺服驱动器部分的调试2-1.接口与接线2-1-1.伺服驱动器端子排布2-1-2. 信号端子分类及其功能编号名称功能接线1 P- 脉冲输入PLC脉冲输出短2 P+24V 集电极开路接入+24V3 D- 方向输入PLC输出端4 D+24V 集电极开路接入+24V2-1-3. 主电路端子及说明2-1-4.标准接线实例2-2.伺服驱动器的参数设置2-2-1.操作面板的使用通过对面板操作器的基本状态进行切换,可进行运行状态的显示、参数的设定、辅助功能运行、报警状态等操作。
按STATUS/ESC 键后,各状态按下图显示的顺序依次切换。
※状态: bb 表示伺服系统处于空闲状态; run 表示伺服系统处于运行状态。
※参数设定 PX-XX:第一个 X 表示组号,后面两个 X 表示该组下的参数序号。
※监视状态 U- XX: XX 表示监控参数序号;※辅助功能 FX-XX:第一个 X 表示组号,后面两个 X 表示该组下的参数序号;※报警状态 E-XXX: XXX 表示报警序号。
2-2-2.控制模式的选择2-2-3.基本功能的设定2-2-4.参数设定举例举例设置参数 P3-09 的内容由 2000 变更为 3000 时的操作步骤。
1. 按下 STATUS/ESC 键,切换到参数设定状态,按 ENTER 键进入该状态。
2. 此时,左数第 2个数码管闪烁,按 INC 键或 DEC 键修改组号,将其改为3,短按 ENTER键确认。
3. 此时,右数两个数码管闪烁,按 INC 键、 DEC 键或 ENTER 键选择序号9,长按 ENTER键确认。
DSP数字式步进伺服驱动器DE5080说明书

三、驱动器端口与接线介绍
3.1 端口定义、引线颜色说明 A、电机和电源输入端口
端子号
符号
名称
1
A+
A 相电机绕组+
2
A-
A 相电机绕组-
3
B+
B 相电机绕组+
4
B-
B 相电机绕组-
5
V-
电源输入
6
V+
电源输入
驱动器故障保护后输
8
ALM-
报警信号负输出
出信号给上位机
D、状态指示
绿色 LED 为电源指示灯,当驱动器接通电源时,该 LED 常亮。红色 LED
为故障指示灯,当出现故障时,该指示灯以周期性循环闪烁。红色 LED 在 一
个固定间隔时间后闪烁次数代表不同的故障信息,具体关系如下表所示:
闪烁次数
报警名称
二、电气、机械和环境指标 2.1 电气指标
参数
连续输出电流 输入电源电压(直流)
逻辑输入电流 脉冲频率 绝缘电阻
提供编码器电流
最小值
0 +24
7 0 500
典型值
10 -
最大值
6.0 +80 20 200
50
单位
A Vdc mA kHz MΩ mA
2.2 使用环境及参数
冷却方式
使用环境
保存温度 重量
本驱动器适合于各种中小型自动化设备和仪器,例如:自动锁螺丝机、线 束加工机、自动打孔机、高速绘图仪以及一些自动化装配设备等。在要求噪音 小、运行平稳、高速度响应的设备中应用效果特佳。
技术特点 u 采用全新 32 位电机控制专用 DSP 芯片; u 采用先进的矢量型闭环控制技术,电机运行更平稳、精度更高; u 精确的位置及速度控制,满足苛刻的应用要求; u 根据负载情况采用变流控制技术,降低电机发热; u 具有高动态响应能力,缩短电机加减速时间; u 通过串口外接手编盒调节系统参数,操作方便简单; u 静态电流和动态电流可以任意设置(0---6A 范围内); u 可适配驱动 42、57 或 60 系列混合式闭环步进电机; u 光电隔离信号输入/输出; u 脉冲响应频率最高可达 200KHz; u 提供 16 档通用细分选择,最大 256 细分(51200 脉冲/转); u 提供与各种脉冲源相匹配的电子齿轮(任意细分值); u 具有过流、过热、过压和跟踪误差超差等保护;
信捷 DP3L 开环步进驱动器 用户手册说明书

无锡信捷电气股份有限公司资料编号D3C04 20210731 1.1信捷电气DP3L系列开环步进驱动器用户手册目录产品简介———————————————————————————安装及接线———————————————————————————驱动器接口介绍———————————————————————————拨码开关设定———————————————————————————保护功能———————————————————————————电机选配———————————————————————————常见故障排查———————————————————————————手册更新日志———————————————————————————1234567基本说明♦感谢您购买了信捷DP3L系列步进驱动器,请在仔细阅读本产品手册后再进行相关操作。
♦本手册主要为用户提供可以正确使用和维护步进驱动的相关指导和说明,手册中涉及到步进驱动的功能、使用方法、安装和维护等。
♦手册中所述内容只适用于信捷公司的DP3L系列步进驱动器产品。
用户须知本手册适用于以下这些人员:♦步进驱动器的安装人员♦工程技术人员(电气工程师、电气操作工等)♦设计人员以上人员在对步进驱动器进行操作或调试前,请认真阅读本手册的安全注意章节。
责任申明♦手册中的内容虽然经过了仔细的核对,但差错难免,我们不能保证完全一致。
♦我们会经常检查手册中的内容,并在后续版本中进行更正,欢迎提出宝贵意见。
♦手册中所叙述的内容如有变动,恕不另行通知。
联系方式如果您有关于本产品的使用问题,请与购买产品的代理商、办事处联系,也可以直接与信捷公司联系。
♦电话:400-885-0136♦传真:*************♦地址:无锡市滴翠路100号创意产业园7号楼4楼♦邮编:214072♦网址:目录1. 产品简介 (1)1-1.型号命名 (1)1-2.性能特点 (1)1-3.应用领域 (1)1-4.电气特性 (2)1-5.安全注意事项 (2)2. 安装及接线 (3)2-1.安装 (3)2-1-1. 外形尺寸 (3)2-1-2. 安装环境 (4)2-2.接线 (5)2-2-1. 典型接线图 (5)2-2-2. 接线注意 (6)3. 驱动器接口介绍 (7)3-1.控制信号接口 (7)3-1-1. 功能描述 (7)3-1-2. 控制信号时序图 (7)3-1-3. 控制信号端口电路 (8)3-2.强电接口 (9)3-2-1. 强电接口功能描述 (9)3-2-2. 供电电源要求 (9)3-3.上位机通讯接口 (9)4.拨码开关设定 (10)4-1.电流设定 (10)4-1-1. 工作(动态)电流设定 (10)4-1-2. 静态电流设定(自动半流功能) (11)4-2.细分设定 (12)4-3.其他拨码设定 (13)4-4.脉冲和方向输入电压设定 (13)5. 保护功能 (14)6. 电机选配 (15)6-1.电机接线 (15)6-3.供电电压和输出电流的选用 (15)6-3-1. 供电电压的设定 (15)6-3-2. 输出电流的设定值 (15)7. 常见故障排查 (16)手册更新日志 (17)1. 产品简介1-1. 型号命名DP3L - 110 22 A 3①②③④⑤①:产品系列DP3L:DP3L系列开环步进驱动器②:驱动器最大峰值电流110:11.3A80:8.4A56:5.6A42:4.2A22:2.2A③:驱动器最大工作电压22:220V8:80V5:50V4:40V④:电压类型A:交/直流供电无:直流供电⑤:驱动器类型3:三相驱动器无:两相驱动器1-2. 性能特点●全新控制算法,性能显著提升,中高速转矩比原有的产品高10~50%。
信捷综合实验指导书[1]
![信捷综合实验指导书[1]](https://img.taocdn.com/s3/m/256e35d384254b35eefd3467.png)
电气控制与PLC技术实验指导书过志强石大奎张鸣扬等编信捷科技电子有限公司2008 年5月前言本指导书为信捷科技电子公司员工内部培训教材,内容编排着眼于基础理论的概括、验证,以及基础技能的训练,以强化实践能力为重点,具有完整、实用、直观、方便、安全等突出优点。
本书将实验过程涉及程序以及正确结论展现于读者。
整个学习过程由学员独立通过实验室实践完成,通过此指导书就可完成所有实验内容,达到学习目的。
实验室配备散装的PLC、变频器、触摸屏、文本屏、开关电源等装备,锻炼学员的实际动手能力。
学员在这些材料基础上进行实验1~实验3的操作。
为取得更好的实验效果,实验室还配备1#试验台(变频器+温控)和2#试验台(步进电机)两种学习平台,学员在这两个平台上进行实验4~实验7的操作。
学员须在上机前作好以下工作的的准备:1.信捷XC系列PLC使用手册。
2.信捷TP系列触摸屏使用手册。
3.信捷OP系列文本屏使用手册。
4.信捷V5系列变频器使用手册。
5.信捷DSP系列步进驱动器产品样本及使用手册(电子版)。
6.信捷电子软件光盘。
7.PLC编程线1根(DVP线)。
8.PLC与触摸屏连接线1根(DVP线)。
9.触摸屏下载线1根。
目录实验一信捷系列产品编程软件的基础应用 (1)一、实验目的 (1)二、材料准备 (1)三、软件安装 (1)四、基本配线 (1)五、程序下载/上载 (1)六、程序编写/调试 (2)七、完成实验报告 (2)实验二变频器基础实验练习 (3)一、实验目的 (3)二、材料准备 (3)三、实验内容 (3)四、实验步骤 (3)五、完成实验报告 (3)实验三步进电机基础实验练习 (4)一、实验目的 (4)二、材料准备 (4)三、实验内容 (4)四、实验步骤 (4)五、完成实验报告 (4)实验四变频器多段速控制 (5)一、实验目的 (5)二、材料准备 (5)三、实验内容 (5)四、实验步骤 (6)五、完成实验报告 (6)实验五高速计数实验 (7)一、实验目的 (7)二、材料准备 (7)三、实验内容 (7)四、PLC输入输出端口分配 (8)五、实验步骤 (8)六、完成实验报告 (9)实验六变频器通讯实验 (10)一、实验目的 (10)二、材料准备 (10)三、实验内容 (10)四、输入输出端口分配 (10)五、实验步骤 (11)六、完成实验报告 (11)实验七温度控制实验 (12)一、实验目的 (12)二、材料准备 (12)三、实验内容: (12)四、输入输出端口分配 (13)五、实验步骤: (13)六、完成实验报告 (13)实验八步进电机正反转实验 (14)一、实验目的 (14)二、材料准备 (14)三、实验内容 (14)四、PLC输入输出端口分配 (15)五、实验步骤 (15)六、完成实验报告(包括控制流程图) (15)实验九步进电机小车实验 (16)一、实验目的 (16)二、材料准备 (16)三、实验内容 (16)四、PLC输入输出端口分配 (17)五、实验步骤 (17)六、完成实验报告(包括控制流程图) (17)实验十步进电机模拟磨床控制实验 (18)一、实验目的 (18)二、材料准备 (18)三、实验内容 (18)四、PLC输入输出端口分配 (19)五、实验步骤 (19)六、完成实验报告(包括控制流程图) (19)实验一信捷系列产品编程软件的基础应用一、实验目的1.学会信捷系列产品软件的安装/卸载。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无锡信捷电气股份有限公司
资料编号DC04 20120924 1.0
DP-508/DP-508-L细分驱动器用户手册
1、产品概述 (1)
1-1.性能特点 (1)
1-2. 应用领域 (1)
1-3. 电气特性 (1)
2、使用指导 (2)
2-1. 安全事项 (2)
2-2. 连线注意点 (2)
2-3. 安装环境 (2)
3、接口和功能介绍 (3)
3-1. 控制信号接口 (3)
3-1-1. 控制信号接口功能描述 (3)
3-1-2. 控制信号时序图 (3)
3-1-3. 输入电路及相关要求 (4)
3-2.功率接口 (4)
3-2-1. 强电接口功能描述 (4)
3-2-2. 供电电源要求 (5)
3-2-3. 与电机接线 (5)
3-3. 功能设定 (5)
3-3-1. 电流设定 (6)
3-3-2. 每转脉冲数设定 (6)
3-4. 保护功能 (6)
4、尺寸、安装及典型接线 (8)
4-1.尺寸 (8)
4-2.安装 (8)
4-3.典型接线 (8)
5、故障诊断和排除 (9)
6、电机选配 (10)
i
DP-508/DP-508-L细分驱动器用户手册ii
DP-508/DP-508-L细分驱动器用户手册
细分型步进驱动器DP-508/DP-508-L最大输入电压80VDC。
输出电流5.0A,可驱动5.0A 以下各种二相混合式步进电机,该产品采用纯正弦波电流控制技术,使电机运行平稳,噪声小,特别适用于激光打标机、数控机床等分辨率较高的小型数控设备上。
1-1.性能特点
⏹超低电机运行噪声
⏹供电电压可达80VDC,建议不低于48VDC
⏹输出电流有效值可达5.0A
⏹细分动态可选,每转脉冲数最大可达40000
⏹可驱动任何5.0A以下4,6,8线两相步进电机
⏹光隔离信号输入
⏹电流设定方便,任意档可选
⏹具有过压、过流保护功能
1-2. 应用领域
适用于各种中小型和自动化设备及仪器,如:气动打标机、贴标机、割字机、激光打标机、绘图仪、小型雕刻机、数控机床、拿放装置等。
在用户期望低振动、小噪声、高精度、高速度的小型设备中效果尤佳。
1-3. 电气特性
1
DP-508/DP-508-L细分驱动器用户手册
请于安装使用驱动器前,仔细阅读本节,并严格遵守!
2-1. 安全事项
⏹驱动器必须由专业技术人员进行安装和操作!
⏹驱动器未接电机前严禁通电!
⏹驱动器的输入电压必须符合技术要求!
⏹严禁带电对电机或驱动器进行设置和测量!
⏹驱动器必须在断电3分钟后,才能再次进行接线、安装和参数设置!
⏹通电前,请确保电源电缆、电机电缆、信号电缆连接的正确性和牢固性!
⏹避免电磁干扰!
2-2.连线注意点
⏹信号电缆和电机电缆必须带屏蔽,分别走线,距离越大,抗干扰越好。
⏹电机电缆双端屏蔽,一端接电机外壳,另一端接驱动器GND端子。
⏹严禁带电插拔输出端子,容易导致驱动器损坏。
2-3.安装环境
⏹避免将驱动器安装在其他发热设备旁。
⏹避免在粉尘、油雾、腐蚀性气体、湿度太大及强震动场合使用。
⏹上位机、驱动器、电机的接地线要与地有大面积接触,确保良好的导电性。
2
DP-508/DP-508-L 细分驱动器用户手册
3
CN23-1. 控制信号接口
3-1-1. 控制信号接口功能描述
3-1-2. 控制信号时序图
为保证系统响应的可靠性,我们对各控制信号作如下要求: ⏹ 信号高电平时要求24V 有效(-L 型为5V 有效),低电平时要求小于0.5V 有效。
⏹ ENA (使能信号)应提前DIR (方向信号)至少3s 变为高电平。
⏹ 确保DIR (方向信号) 领先PUL (脉冲信号)下降沿至少5μs 建立。
⏹ 脉冲宽度不能小于1.2μs 。
⏹ 脉冲低电平持续时间不能少于1.2μs 。
DP-508/DP-508-L 细分驱动器用户手册
4
时序图具体如下:
3-1-3. 输入电路及相关要求
介绍驱动器输入电路的共阳极接法,示意图如下:
输入要求
⏹ 所有输入信号均通过光电隔离,为确保内置高速光耦可靠导通,要求提供控制信号的电
流驱动能力至少8mA 。
⏹ 驱动器内部已串入光耦限流电阻,各控制信号一般接+24V (-L 型接5V )。
3-2. 功率接口
3-2-1. 强电接口功能描述
DP-508/DP-508-L 细分驱动器用户手册
5
3-2-2. 供电电源要求
⏹ 电源电压切勿接反!
⏹ 电源工作范围:20~80VDC ,保证驱动器正常工作。
⏹ 电源宜采用非稳压型直流电源,电源输出能力应大于驱动器设定电流的60%。
⏹
若使用稳压型开关电源供电,电源的输出电流范围需大于电机工作电流。
3-2-3. 与电机接线
注意:
当驱动器与电机采取不同接线时,电机的运行效果有很大区别。
通常,驱动器的供电电压决定了电机运行的高速性能(供电电压越大,高速力矩越大,可有效避免失步),设定电流值决定了电机的输出力矩(设定电流越大,电机输出力矩越大)。
但是,供电电压大时,低速运转时的振动也较大;设定电流值大时,驱动器和电机的发热都很严重。
因此,在实际使用中,用户应根据自身需要,采取合适的连接方式,以达到满意的效果。
下图列举了几种连接方式和设定要点,仅供用户参考: ⏹ 8线并联模式:设定电流值应为电机额定电流值的1.4倍; ⏹ 8线串行模式:设定电流值应为电机额定电流值的70%;
⏹ 4线、6线高速模式:设定电流值要小于或等于电机的额定电流值; ⏹ 6线高力矩模式:设定电流值应为电机额定电流值的70%。
A+
A-
B+
B-A+A-B+
B-A+A-B-
NC NC A+A-NC
B+NC
八线电机串行接法(低速力矩大)
八线电机并行接法(高速性能好)
四线电机
六线电机高力矩模式六线电机高速模式B-
B+
A+A-
3-3. 功能设定
驱动器采用八位拨码开关设定半流/全流和每转脉冲数。
具体功能设定如下:
DP-508/DP-508-L细分驱动器用户手册
6 SW1~SW3:电流设定;
SW4:设定半流/全流(SW1=OFF:半流状态;SW1=ON:全流状态);SW5~ SW8:设定每转脉冲数。
3-3-1. 电流设定
SW1~SW3用来设定电流,范围0~5.0A,见下图所示:
3-3-2. 每转脉冲数设定
每转脉冲数由SW5~SW8四位拨码开关控制,详细设置如下表所示:
3-4.保护功能
状态指示灯
电源指示灯PWR:绿灯亮时,正常工作状态;
报警指示灯ALM:红灯亮时,进入报警状态,说明此时出现了过压或过流;红灯等间隔闪烁为过压报警,红灯常亮为过流报警。
DP-508/DP-508-L细分驱动器用户手册
⏹故障输出
当驱动器出现过压或欠压时,由ERR、COM端子输出故障信号。
⏹过流、过压保护
当电源电压大于上限电压85VDC,或电机电流大于设定值的20%时,保护电路采取保护措施,关断PWM输出,报警指示灯给出相应报警信息。
注意:当以上保护电路动作后,驱动器无法正常工作,只有消除故障,重新上电,电源指示灯变绿后,方可使驱动器恢复。
7
DP-508/DP-508-L 细分驱动器用户手册
8
4-1. 尺寸
DP-508、DP-508-L 的尺寸如下图所示:
4-2. 安装
驱动器应安装在通风良好,防护妥善的电柜内,并定期检查散热风扇运转是否正常。
为保证驱动器散热条件,请按至少10cm 以上空间间距安装。
安装时要避免粉尘和杂物落入驱动器内部。
4-3. 典型接线
注意:用户在接线时,应遵循功率线(电机相线、电源线)和弱电信号线分开的原则,以避
免控制信号受到干扰。
单位:mm
DP-508/DP-508-L细分驱动器用户手册
9
DP-508/DP-508-L细分驱动器用户手册
10 DP-508、DP-508-L适用于4,6,8线二相混合式步进电机,但为了使电机运转效果最
佳,通常要选择合适的电机与驱动器相配。
一般说来,电机的选择主要看电机扭矩和额定电流两方面。
扭矩的大小取决于电机的尺寸,尺寸大的电机扭矩也大;电流大小主要取决于电感,小电感的电流较大,电机高速运转时性能较好。
对于某一给定接法的电机来说,电机的工作电流越大,输出转矩越大,电机发热也较严重;驱动器的供电电压越大,电机高速扭矩也越大;电机高速运行时的扭矩比中低速运行时的扭矩要小。
无锡信捷电气股份有限公司
江苏省无锡市蠡园开发区滴翠路100号创意产业园7号楼四楼
邮编:214072
电话:(0510) 85134136
传真:(0510) 85111290 Xinje Electric Co., Ltd.
4th Floor Building 7,Originality Industry park, Liyuan Development Zone, Wuxi City, Jiangsu Province 214072
Tel: (510) 85134136
Fax: (510) 85111290。