ansys时间步长的确定
ansys常用命令合集(二)ansysansys常用命令,ansys命令,caean...

ansys常用命令合集(二)ansysansys常用命令,ansys命令,caean...ANSYS常用命令合集(二)2011年02月23日中华工程师网-2.6根据需要耦合某些节点自由度cp, nset, lab,,node1,node2,……node17nset: 耦合组编号lab: ux,uy,uz,rotx,roty,rotznode1-node17: 待耦合的节点号。
如果某一节点号为负,则此节点从该耦合组中删去。
如果node1=all,则所有选中节点加入该耦合组。
注意:1,不同自由度类型将生成不同编号2,不可将同一自由度用于多套耦合组CPINTF, LAB, TOLER 将相邻节点的指定自由度定义为耦合自由度LAB:UX,UY,UZ,ROTX,ROTY,ROTZ,ALLTOLER: 公差,缺省为0.0001说明:先选中欲耦合节点,再执行此命令2.7定义单元表说明:1,单元表仅对选中单元起作用,使用单元表之前务必选择一种类型的单元2,单元表各行为选中各单元,各列为每单元的不同数据ETABLE, LAB, ITEM, COMP 定义单元表,添加、删除单元表某列LAB:用户指定的列名(REFL, STAT, ERAS 为预定名称)ITEM: 数据标志(查各单元可输出项目)COMP: 数据分量标志2.8存盘save, fname, ext,dir, slab 存盘fname : 文件名(最多32个字符)缺省为工作名ext: 扩展名(最多32个字符)缺省为dbdir: 目录名(最多64个字符)缺省为当前slab: “all”存所有信息“model”存模型信息“solv”存模型信息和求解信息3/solu/solu 进入求解器3.1加边界条件D, node, lab, value, value2, nend, ninc, lab2, lab3, ……lab6 定义节点位移约束Node : 预加位移约束的节点号,如果为all,则所有选中节点全加约束,此时忽略nend和ninc.Lab: ux,uy,uz,rotx,roty,rotz,allValue,value2: 自由度的数值(缺省为0)Nend, ninc: 节点范围为:node-nend,编号间隔为ninc Lab2-lab6: 将lab2-lab6以同样数值施加给所选节点。
ansys中子步和载荷步的含义与设置方法
在Ansys中,子步和载荷步是非常重要的概念,对于进行复杂仿真分析的工程师来说,深入理解并正确设置子步和载荷步是非常关键的。
接下来,我将从深度和广度的角度,结合自己的理解和经验,详细解释这两个概念的含义和设置方法。
1. 子步的含义与设置方法让我们来理解什么是子步。
在Ansys中,子步是为了确保仿真收敛而进行的时间步长分割。
当仿真过程中存在非线性行为或者材料模型的非线性影响较大时,我们就需要使用子步来有效地控制仿真的精度和稳定性。
在设置子步时,首先需要考虑仿真的时间范围,并根据具体情况进行合理的分割。
一般来说,我们可以根据仿真模型的非线性程度和材料特性来确定子步的数量和大小。
对于高度非线性的模型,需要细分子步以确保仿真的准确性;而对于较为线性的模型,则可以适当减少子步以提高仿真效率。
在设置子步时,还需要考虑到各个载荷的作用情况,以确保在每个子步内能够充分考虑不同载荷的影响。
通过合理设置子步,可以有效地控制仿真的收敛性,并且提高仿真结果的准确性。
2. 载荷步的含义与设置方法载荷步是指在Ansys中对载荷进行分段加载的方法。
在工程仿真中,往往会面对需要分段加载的情况,这时就需要使用载荷步来对载荷进行合理分段,并进行逐步加载以观察结构的响应。
在设置载荷步时,首先需要考虑加载的类型和大小,然后根据具体的分析目的来确定载荷的分段情况。
通常情况下,我们可以根据结构的承载能力和材料的特性来确定载荷的分段加载,并且可以根据仿真的结果来调整载荷步的设置,以得到更加准确的分析结果。
总结和回顾通过对子步和载荷步的含义和设置方法的详细解释,我们可以看到,在Ansys中合理设置子步和载荷步对于确保仿真的准确性和稳定性是非常重要的。
通过合理分割子步和载荷,我们可以更好地控制仿真的收敛性和精度,并且可以更加准确地模拟结构的响应情况。
个人观点和理解在我的实际工程仿真经验中,我发现合理设置子步和载荷步可以大大提高仿真的精度和效率。
ANSYS非线性命令解析
ANSYS非线性命令解析〔1ANSYS应用基于问题物理特性的自动求解控制方法,把各种非线性分析控制参数设置到合适的值。
如果用户对这些设置不满意,还可以手工设置。
下列命令的缺省设置已进行了优化处理:AUTOTS PRED MONITORDELTIM NROPT NEQITNSUBST TINTP SSTIFCNVTOL CUTCONTROL KBCLNSRCH OPNCONTROL EQSLVARCLEN CDWRITE LSWRITE这些命令及其设置在将在后面讨论。
参见《ANSYS Commands Reference》。
如果用户选择自己的设置而不是ANSYS的缺省设置,或希望用以前版本的ANSYS的输入列表,则可用/ SOLU 模块的SOLCONTROL ,OFF命令,或在/ BATCH 命令后用/ CONFIG ,NLCONTROL,OFF命令。
参见SOLCONTROL 命令的详细描述。
ANSYS对下面的分析激活自动求解控制单场的非线性或瞬态结构以及固体力学分析,在求解自由度为UX、UY、UZ、ROTX、ROTY、ROTZ 的结合时;单场的非线性或瞬态热分析,在求解自由度为TEMP时;注意-- 本章后面讨论的求解控制对话框,不能对热分析做设置。
用户必须应用标准的ANSYS求解命令或GUI来设置。
2.2 非线性静态分析步骤尽管非线性分析比线性分析变得更加复杂,但处理基本相同。
只是在非线形分析的过程中,添加了需要的非线形特性。
非线性静态分析是静态分析的一种特殊形式。
如同任何静态分析,处理流程主要由以下主要步骤组成:建模;设置求解控制;设置附加求解控制;加载;求解;考察结果。
2.2.1 建模这一步对线性和非线性分析基本上是一样的,尽管非线性分析在这一步中可能包括特殊的单元或非线性材料性质,参考§4《材料非线性分析》,和§6.1《单元非线性》。
如果模型中包含大应变效应,应力─应变数据必须依据真实应力和真实<或对数>应变表示。
ansys中子步和载荷步的含义与设置方法
ansys中子步和载荷步的含义与设置方法在ANSYS中,子步和载荷步是用于模拟复杂工程问题的重要概念。
子步(Substep)是为了更精确地捕捉结构在非线性或动态情况下的行为而引入的一个概念。
而载荷步(Load Step)是将模拟分为多个连续的时间段或加载阶段,以模拟结构在不同加载条件下的响应。
子步是在每个载荷步中进一步细化时间,将一个载荷步划分为多个小的时间间隔。
这样做的目的是为了更准确地模拟结构在非线性或动态情况下的行为。
在每个子步中,ANSYS会根据结构的当前状态进行计算,然后根据所设定的子步数和时间步长进行迭代计算,直到达到收敛条件。
设置子步的方法主要包括以下几个步骤:1. 定义载荷步:在ANSYS中,首先需要定义每个载荷步所需的加载条件,如施加的力、位移或温度等。
这可以在ANSYS的预处理环境中完成。
2. 设置子步数和时间步长:根据结构的特性和所需的精度,确定所需的子步数和时间步长。
子步数越多,模拟结果越精确,但计算时间也会增加。
时间步长则决定了子步之间的时间间隔。
需要根据结构的动态响应特性来选择合适的时间步长。
3. 定义收敛条件:为了使计算得到准确的结果,需要设置适当的收敛条件。
在每个子步中,ANSYS会计算结构的响应,并与指定的收敛条件进行比较。
如果未达到收敛条件,则继续迭代计算直到满足收敛要求。
载荷步则用于将模拟划分为多个时间段或加载阶段,以模拟结构在不同加载条件下的响应。
在每个载荷步中,ANSYS会根据所定义的加载条件进行计算,并输出相应的结果。
设置载荷步的方法如下:1. 定义不同的加载条件:在ANSYS中,首先需要定义不同的加载条件,如施加的力、位移或温度等。
这可以在ANSYS的预处理环境中完成。
2. 排列和定义载荷步:根据实际情况,将不同的加载条件按照顺序排列,并为每个载荷步设置开始时间和结束时间。
开始时间可以根据前一载荷步的结束时间来确定。
3. 运行模拟:在设置完所有的载荷步之后,可以运行模拟并获取相应的结果。
ansys电容纹波仿真
ANSYS电容纹波仿真1. 简介电容纹波是指电容器在工作过程中电压或电流发生的周期性变化。
为了准确地预测和分析电容纹波的行为,可以使用ANSYS进行电容纹波仿真。
ANSYS是一款强大的工程仿真软件,可以模拟和分析各种电磁、机械、流体和热力学问题。
本文将介绍如何使用ANSYS进行电容纹波仿真,包括建模、设置边界条件、求解和结果分析等。
2. 建模在进行电容纹波仿真之前,首先需要进行建模。
建模的过程包括创建几何模型、定义材料属性和设置边界条件。
2.1 创建几何模型首先,打开ANSYS软件并选择适合的模块,例如ANSYS Electronics Desktop。
然后,使用软件提供的几何建模工具创建电容器的几何模型。
可以选择矩形、圆柱形或其他形状,根据实际情况进行选择。
2.2 定义材料属性接下来,需要定义电容器的材料属性。
可以根据实际情况选择合适的材料,并设置其电介质常数和导电性等属性。
2.3 设置边界条件在进行电容纹波仿真时,需要设置适当的边界条件。
根据实际情况,可以设置电容器的电压或电流作为边界条件,以模拟实际工作条件。
3. 设置仿真参数在进行电容纹波仿真之前,需要设置一些仿真参数,以确保仿真结果的准确性和可靠性。
3.1 网格划分在进行电容纹波仿真时,需要将几何模型划分为小的单元,称为网格。
网格的划分需要根据模型的复杂程度和仿真要求进行选择。
通常,网格划分越精细,仿真结果越准确,但计算时间也会增加。
3.2 时间步长仿真过程中,需要选择合适的时间步长。
时间步长的选择需要根据电容纹波的频率和模型的动态响应进行调整。
通常,较小的时间步长可以提高仿真结果的准确性,但也会增加计算时间。
3.3 求解器选择在进行电容纹波仿真时,可以选择不同的求解器。
ANSYS提供了多种求解器,例如频域求解器和时域求解器。
根据实际情况,选择适合的求解器进行仿真。
4. 求解和结果分析设置好仿真参数后,可以开始进行电容纹波仿真。
ANSYS将根据所设置的边界条件和材料属性对模型进行求解,并生成仿真结果。
直流电机ansys仿真参数设置

直流电机ansys仿真参数设置
ANSYS仿真是直流电机进行模拟测试的重要工具,其可以分析模拟直流电机的物理性能参数,并针对不同应用需求提供相应的计算和调整。
本文将详细介绍ANSYS仿真设置参数的步骤,并以直流电机模拟测试为例,说明如何有效地设置参数。
首先,需要选择直流电机作为计算对象,然后配置模拟测试所需的相关参数。
具体而言,有必要考虑电机的构造参数和运行参数的影响。
包括电机的功率、转数和安装参数等,以及控制模式、输出转矩和特性等仿真测试参数。
接下来,需要根据直流电机的运行特性设置ANSYS仿真的相应参数。
这包括设定模拟步骤数量,即模拟步骤之间时间间隔;定义不同参数的运动范围区间,它可以指定系统特性;时间和步长控制方式,用于控制模拟结果的精度及稳定性。
还有一些相关参数也可以设置,这些参数指定了模拟测试中直流电机的电磁特性及汽车系统参数,比如摩擦力、热力学效应、负载及驱动系统等参数,都必须考虑到。
最后,应给定模拟的终止条件,并且可以调整ANSYS仿真参数,以增强系统的表现,例如采用线性编码器、抗饱和等参数调节控制;同时可根据模拟结果,实时监控直流电机的特性,观察何种运行条件下汽车系统的性能最佳,从而确定能够有效提升系统性能的参数配置。
综上所述,ANSYS仿真设置参数的全过程可以分为四大步骤:确定模拟对象并配置实验参数;根据直流电机的运行特性设置ANSYS仿真参数;设置模拟测试的其他参数;调整ANSYS仿真参数,促进系统性能改善。
通过这些步骤,可有效地选择和调整ANSYS仿真参数,以达到模拟测试期望的结果,并为直流电机产品设计提供有力支撑。
ANSYS的最常用的命令解释
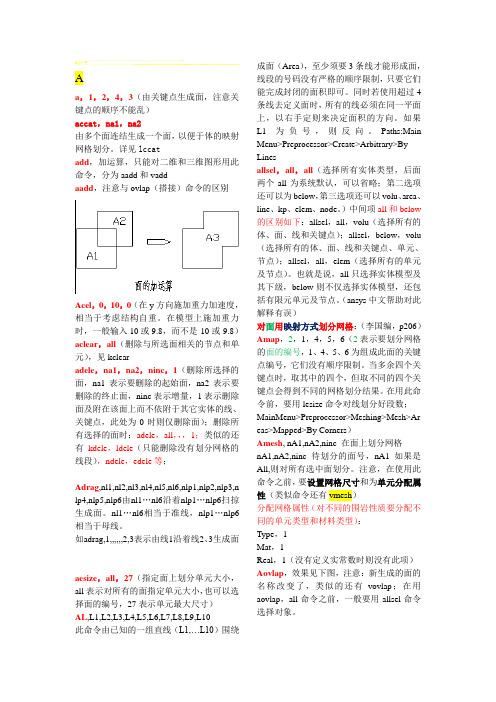
Aa,1,2,4,3(由关键点生成面,注意关键点的顺序不能乱)accat,na1,na2由多个面连结生成一个面,以便于体的映射网格划分。
详见lccatadd,加运算,只能对二维和三维图形用此命令,分为aadd和vaddaadd,注意与ovlap(搭接)命令的区别Acel,0,10,0(在y方向施加重力加速度,相当于考虑结构自重。
在模型上施加重力时,一般输入10或9.8,而不是-10或-9.8)aclear,all(删除与所选面相关的节点和单元),见kclearadele,na1,na2,ninc,1(删除所选择的面,na1表示要删除的起始面,na2表示要删除的终止面,ninc表示增量,1表示删除面及附在该面上而不依附于其它实体的线、关键点,此处为0时则仅删除面);删除所有选择的面时:adele,all,,,1;类似的还有kdele,ldele(只能删除没有划分网格的线段),ndele,edele等;Adrag,nl1,nl2,nl3,nl4,nl5,nl6,nlp1,nlp2,nlp3,n lp4,nlp5,nlp6由nl1…nl6沿着nlp1…nlp6扫掠生成面。
nl1…nl6相当于准线,nlp1…nlp6相当于母线。
如adrag,1,,,,,,2,3表示由线1沿着线2、3生成面aesize,all,27(指定面上划分单元大小,all表示对所有的面指定单元大小,也可以选择面的编号,27表示单元最大尺寸)AL,L1,L2,L3,L4,L5,L6,L7,L8,L9,L10此命令由已知的一组直线(L1,…L10)围绕成面(Area),至少须要3条线才能形成面,线段的号码没有严格的顺序限制,只要它们能完成封闭的面积即可。
同时若使用超过4条线去定义面时,所有的线必须在同一平面上,以右手定则来决定面积的方向。
如果L1为负号,则反向。
Paths:Main Menu>Preprocessor>Create>Arbitrary>By Linesallsel,all,all(选择所有实体类型,后面两个all为系统默认,可以省略;第二选项还可以为below,第三选项还可以volu、area、line、kp、elem、node。
fluent_计算步骤

导出为数据文件
将数值形式的计算结果导出为数 据文件,如Excel、SPSS格式,方 便用户进行数据管理和统计分析 。
THANKS
谢谢您的观看
在每个迭代步骤中,根据物理 方程进行计算,更新物理量。
监视计算过程和结果
01
在计算过程中,监视计算域内的 物理量变化。
02
检查计算结果的收敛性和稳定性 。
如果发现计算结果不收敛或不稳 定,需要调整数值方法和算法, 重新进行计算。
03
在计算结束后,对结果进行后处 理和分析,提取有用的信息和结
论。
04Biblioteka Fluent 20.1”等。
进入主界面,包括菜单栏、工具栏、图形窗口和消息窗口等。
03
导入模型文件
在菜单栏中选择“File”菜单 。
在弹出的对话框中选择要导 入的模型文件,例如 “case”或“mesh”等。
在下拉菜单中选择 “Import”选项。
点击“Open”按钮,导入模 型文件。
检查模型完整性
选择求解器类型
有限元法(FEM)
适用于解决各种工程问题,如结构分析、热传导、流体动 力学等。
有限体积法(FVM)
适用于解决流体动力学问题,如流体流动、传热等。
有限差分法(FDM)
适用于解决偏微分方程,如热传导方程、波动方程等。
设置求解器参数
网格尺寸
确定计算域的离散程度,网格尺寸越小,计算精度越高,但计算时 间也会增加。
定义计算域的边界
根据几何形状,定义计算域的边界,包括起始点、终止点和边界条 件等。
确定计算域的大小和分辨率
ANSYSWorkbench使用中99%的时候都会用到的操作
ANSYSWorkbench使⽤中99%的时候都会⽤到的操作本⽂源⽂来⾃公众号CAD初学者结合个⼈经验,介绍⼀些ANSYS Workbench使⽤过程中的⼀些实⽤操作,主要包括:印记⾯建⽴、局部⽹格信息读取、求解设置(载荷步、并⾏计算、求解过程信息查看)以及结果后处理(节点结果输出、Surface、Path等)。
1 模型中的印迹⾯经典版的ANSYS中,可以直接施加载荷在节点上从⽽实现某个局部范围上的载荷施加,但在ANSYSWorkbench中就不怎么⽅⾯。
Workbench中有⼀个功能可以实现在局部区域施加载荷,即创建Imprint face(印记⾯功能)。
该功能须在Geometry中进⾏编辑,随后在Mechanical中将载荷局部施加在所创建的印记⾯上。
对于外部导⼊的模型,geometry编辑时,先对操作对象进⾏解冻(Unfreeze),若为geometry所建模型则⽆需此操作。
根据需求,在所需平⾯内绘制载荷施加形状,这⾥为圆。
在modeling中对该草图进⾏拉伸,在拉伸选项中选择Imprint Face并generate。
完成印记⾯的添加如下:2 ⽹格2.1 ⽹格质量检查在Mesh→Statistics→Mesh metric中,可选择不同项对单元⽹格质量进⾏综合评估。
常⽤的包括单元质量(ElementQuality)、单元长宽⽐(AspectRatio)、雅克⽐(JacobianRatio)以及最⼤⾓度(MaximumCorner Angle)等。
通过合理的⽹格划分⽅法,综合考虑这⼏项单元质量指标,有助于计算过程的顺利进⾏(尤其是遇到⾮线性求解)。
⽹格质量:单元长宽⽐:单元雅克⽐:单元最⼤顶⾓:2.2 局部⽹格信息输出对于局部区域的⽹格信息,可通过建⽴Named selection导出信息。
右键选择Named Selection选项,选择Export,导出txt⽂件,即可得到该区域的⽹格及其节点信息,包括单元编号、单元类型、节点编号。
ANSYS稳态和瞬态分析步骤简述..
ANSYS稳态和瞬态热模拟基本步骤基于ANSYS 9。
0一、稳态分析从温度场是否是时间的函数即是否随时间变化上,热分析包括稳态和瞬态热分析。
其中,稳态指的是系统的温度场不随时间变化,系统的净热流率为0,即流入系统的热量加上系统自身产生的热量等于流出系统的热量:(3-1)=0+-q q q流入生成流出在稳态分析中,任一节点的温度不随时间变化.基本步骤:(为简单起见,按照软件的菜单逐级介绍)1、选择分析类型点击Preferences菜单,出现对话框1。
对话框1我们主要针对的是热分析的模拟,所以选择Thermal.这样做的目的是为了使后面的菜单中只有热分析相关的选项.2、定义单元类型GUI:Preprocessor>Element Type〉Add/Edit/Delete 出现对话框2对话框2点击Add,出现对话框3对话框3在ANSYS中能够用来热分析的单元大约有40种,根据所建立的模型选择合适的热分析单元。
对于三维模型,多选择SLOID87:六节点四面体单元。
3、选择温度单位默认一般都是国际单位制,温度为开尔文(K).如要改为℃,如下操作GUI:Preprocessor>Material Props>Temperature Units选择需要的温度单位。
4、定义材料属性对于稳态分析,一般只需要定义导热系数,他可以是恒定的,也可以随温度变化。
GUI: Preprocessor〉Material Props> Material Models 出现对话框4对话框4一般热分析,材料的热导率都是各向同性的,热导率设定如对话框5.对话框5若要设定材料的热导率随温度变化,主要针对半导体材料。
则需要点击对话框5中的Add Temperature选项,设置不同温度点对应的热导率,当然温度点越多,模拟结果越准确.设置完毕后,可以点击Graph按钮,软件会生成热导率随温度变化的曲线。
对话框5中,Material菜单,New Model选项,添加多种材料的热参数。
ansys14.0注意的问题
1.wall_deforming wall_top等壁面的定义,都应该在流体上定义。
2.在Fluent里,time step size和number of time steps的意思分别是时间步长和步数,步长就是求解时每次推进的时间间隔,步数就是按时间步长推进求解的次数 两者相乘为求解的总时间。
例如:time step size 0.001s, number of time step 2000 ,步长0.001秒,步数2000,也就是模拟的时间长度为 2 秒。
3.fluent中计算非定常问题时,迭代步长的时间(即time step size)是如何选定的?答:一般来说选最小网格长度除以速度的1/34.fluent计算,iterate步骤,max iteration per time step的数值设的小一些可以吗?现设置为20 答:20是默认的值。
这个值与你具体的迭代情况有关,意思是在一个step里最多迭代20次,在这20次里,如果cas收敛,自动进行下一个step里迭代,如果不收敛,迭代至20次后跳出,再进入下一个step。
所以,你最好设置的稍大些。
5.哪位知道workbench中engineering data中的每一项中前面的小方块,也就是点击之后显示蓝色P字的地方,那是什么意思的啊?有什么用么?答:Y ou can also parameterize properties for later use in DesignXplorer(多目标优化模块)from the summary view by selecting the box to the left of the property name. Parameterization is indicated with a P as shown here: .Engineering Data Help 》Material Data 》Modify and Parameterize Material Properties6.workbench中的无摩擦约束(Frictionless Support)是什么意思?这个约束是什么意思啊,我的资料上说是“一种施加在整个面的法线方向上的约束。
一线工程师总结AnsysWorkbench之Mechanical应用——分析设置

一线工程师总结AnsysWorkbench之Mechanical应用——分析设置对于结构静力学中的简单线性问题,不需要对其进行设置,但是对于复杂的分析需要设置一些控制选项。
分析设置是在Mechanical分析树的Static Structural下的Anslysis Settings细节设置中。
本文主要对载荷步控制、求解器控制、重启控制、非线性控制、输出控制、分析数据管理进行介绍。
1 载荷步控制载荷步控制用于指定求解步数和时间。
在非线性分析时,用于控制时间步长。
载荷步控制也用于创建多载荷步,如螺栓预紧载荷。
1.1 载荷步与子步载荷步、子步和平衡迭代是控制加载求解过程的三个载荷时间历程节点。
1.1.1 载荷步在线性静力学分析或稳态分析中,可以使用不同的载荷步施加不同的载荷组合。
在瞬态分析中,可以将多个载荷步加载到同一加载历程曲线的不同时间点。
注意:载荷可以分步,约束不能分步。
实例1,固定矩形条一端,在另一端分3步加载载荷,第一步只加载100N的力,第二步只加载10000Nm的逆时针扭矩,第三步推力与扭矩共同作用,求每一步的变形。
Step1,设置零件材料,接触关系,网格划分,过程略。
Step2,分析设置,将载荷步设置为3,其余默认。
Step3,设置边界条件,如下图。
载荷默认都是渐增(斜坡)加载的,用一个载荷步将载荷从0增加到设定值。
选中分析树中的Force,在信息窗口中出现了Tabular Data表格和Graph图表,代表了Force的加载历程,在第一步中,力从0渐变到100,并在第二三步中保持。
对于静力学分析,渐增加载与恒定加载计算无区别,本例将力与扭矩都改为恒定加载,在表格第一行将数字改为设定值。
要想Force在第二步不起作用,只需要点击图表的第二步区域或表格对应行,右击选择Activate/Deactive at this step!(在此步激活/取消),此载荷便在第二步中消失。
同样设置Moment载荷,使它在第一步中不起作用。
ANSYS结构非线性分析指南(一至三章)
ANSYS结构非线性分析指南(一到三章)屈服准则概念:1.理想弹性材料物体发生弹性变形时,应力与应变完全成线性关系,并可假定它从弹性变形过渡到塑性变形是突然的。
2.理想塑性材料(又称全塑性材料)材料发生塑性变形时不产生硬化的材料,这种材料在进入塑性状态之后,应力不再增加,也即在中性载荷时即可连续产生塑性变形。
3.弹塑性材料在研究材料塑性变形时,需要考虑塑性变形之前的弹性变形的材料这里可分两种情况:Ⅰ.理想弹塑性材料在塑性变形时,需要考虑塑性变形之前的弹性变形,而不考虑硬化的材料,也即材料进入塑性状态后,应力不再增加可连续产生塑性变形。
Ⅱ.弹塑性硬化材料在塑性变形时,既要考虑塑性变形之前的弹性变形,又要考虑加工硬化的材料,这种材料在进入塑性状态后,如应力保持不变,则不能进一步变形。
只有在应力不断增加,也即在加载条件下才能连续产生塑性变形。
4.刚塑性材料在研究塑性变形时不考虑塑性变形之前的弹性变形。
这又可分两种情况:Ⅰ.理想刚塑性材料在研究塑性变形时,既不考虑弹性变形,又不考虑变形过程中的加工硬化的材料。
Ⅱ.刚塑性硬化材料在研究塑性变形时,不考虑塑性变形之前的弹性变形,但需要考虑变形过程中的加工硬化材料。
屈服准则的条件:1.受力物体内质点处于单向应力状态时,只要单向应力大到材料的屈服点时,则该质点开始由弹性状态进入塑性状态,即处于屈服。
2.受力物体内质点处于多向应力状态时,必须同时考虑所有的应力分量。
在一定的变形条件(变形温度、变形速度等)下,只有当各应力分量之间符合一定关系时,质点才开始进入塑性状态,这种关系称为屈服准则,也称塑性条件。
它是描述受力物体中不同应力状态下的质点进入塑性状态并使塑性变形继续进行所必须遵守的力学条件,这种力学条件一般可表示为)=Cf(σij又称为屈服函数,式中C是与材料性质有关而与应力状态无关的常数,可通过试验求得。
屈服准则是求解塑性成形问题必要的补充方程。
1.1 什么是结构非线性在日常生活中,经常会遇到结构非线性。
(完整版)ANSYS的最常用的命令解释
Aa,1,2,4,3(由关键点生成面,注意关键点的顺序不能乱)accat,na1,na2由多个面连结生成一个面,以便于体的映射网格划分。
详见lccatadd,加运算,只能对二维和三维图形用此命令,分为aadd和vaddaadd,注意与ovlap(搭接)命令的区别Acel,0,10,0(在y方向施加重力加速度,相当于考虑结构自重。
在模型上施加重力时,一般输入10或9.8,而不是-10或-9.8)aclear,all(删除与所选面相关的节点和单元),见kclearadele,na1,na2,ninc,1(删除所选择的面,na1表示要删除的起始面,na2表示要删除的终止面,ninc表示增量,1表示删除面及附在该面上而不依附于其它实体的线、关键点,此处为0时则仅删除面);删除所有选择的面时:adele,all,,,1;类似的还有kdele,ldele(只能删除没有划分网格的线段),ndele,edele等;Adrag,nl1,nl2,nl3,nl4,nl5,nl6,nlp1,nlp2,nlp3,n lp4,nlp5,nlp6由nl1…nl6沿着nlp1…nlp6扫掠生成面。
nl1…nl6相当于准线,nlp1…nlp6相当于母线。
如adrag,1,,,,,,2,3表示由线1沿着线2、3生成面aesize,all,27(指定面上划分单元大小,all表示对所有的面指定单元大小,也可以选择面的编号,27表示单元最大尺寸)AL,L1,L2,L3,L4,L5,L6,L7,L8,L9,L10此命令由已知的一组直线(L1,…L10)围绕成面(Area),至少须要3条线才能形成面,线段的号码没有严格的顺序限制,只要它们能完成封闭的面积即可。
同时若使用超过4条线去定义面时,所有的线必须在同一平面上,以右手定则来决定面积的方向。
如果L1为负号,则反向。
Paths:Main Menu>Preprocessor>Create>Arbitrary>By Linesallsel,all,all(选择所有实体类型,后面两个all为系统默认,可以省略;第二选项还可以为below,第三选项还可以volu、area、line、kp、elem、node。
ANSYS 各种类型分析方法与步骤
ANSYS 各种类型分析方法与步骤静力分析轴对称问题有限元(设置)选择单元Element Types-单击Options按钮,在“Element behavior”选择“Axisymmetric”-OK.显示单元受力情况:Utility Menu>Select>Entities…选择“Elements”点[Apply]弹出“Select elements”对话框,选择[Box].得到三维应力图:Utility Menu>PlotCtrls>Style>Symmetry Expansion>2D Axi-Symmetric.!轴对称问题有限元可以采用三维空间单元模型求解。
–轴对称模型中的载荷是3-D结构均布面力载荷的总量。
轴对称单元:PLANE25,SHELL61,PLANE75,PLANE78,FLUID81,PLANE83杆梁问题有限元(设置)主要不同在于:框架为线;选择单元—Beam;设置实常数前三个。
可以选择打开截面功能:Utility Menu>PlotCtrls>Size and Shape板壳问题的有限元(设置)主要不同在于:框架为面;选择单元—Shell,设置实常数—输入厚度I.J.K.Lnodes的厚度。
结构振动问题有限元(设置)对梁杆结构振动:主要不同在于:框架为线;选择单元—Beam;设置实常数前三个。
1.模态分析设置:Main Menu>Solution>Analysis Type>New Analysis,设置模态分析。
选择Modal. Main Menu>Solution>Analysis Type> Analysis Options选择Reduced,OK.弹出对话框,输入频率0和10000其他默认,OK。
Main Menu>Solution>Master DOFs>Program Selected在主自由度“NTOT”输入“420”,即结点数的2倍。
ansys常见问题解答
ANSYS常见问题及应用技巧本篇开始讲述ANSYS在使用过程中常见的问题和在使用时一些常用的使用技巧,对与初学者来说,理解和弄清楚这些问题的根源和掌握这些使用技巧,能够更好的理解ANSYS这个软件本身。
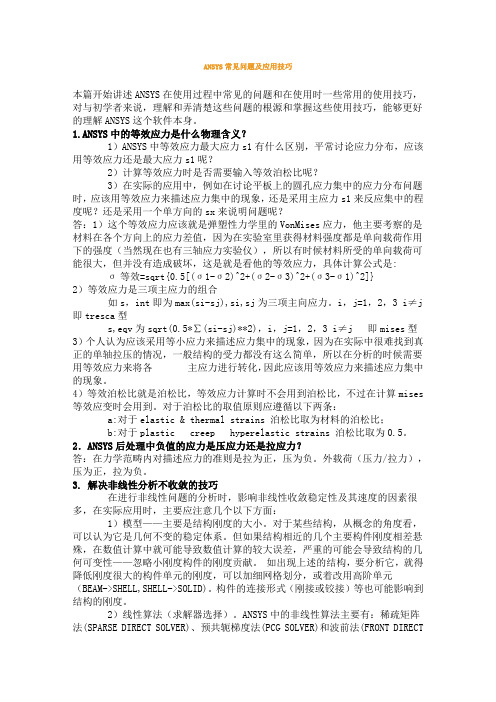
1.ANSYS中的等效应力是什么物理含义?1)ANSYS中等效应力最大应力s1有什么区别,平常讨论应力分布,应该用等效应力还是最大应力s1呢?2)计算等效应力时是否需要输入等效泊松比呢?3)在实际的应用中,例如在讨论平板上的圆孔应力集中的应力分布问题时,应该用等效应力来描述应力集中的现象,还是采用主应力s1来反应集中的程度呢?还是采用一个单方向的sx来说明问题呢?答:1)这个等效应力应该就是弹塑性力学里的VonMises应力,他主要考察的是材料在各个方向上的应力差值,因为在实验室里获得材料强度都是单向载荷作用下的强度(当然现在也有三轴应力实验仪),所以有时候材料所受的单向载荷可能很大,但并没有造成破坏,这是就是看他的等效应力,具体计算公式是: σ等效=sqrt{0.5[(σ1-σ2)^2+(σ2-σ3)^2+(σ3-σ1)^2]}2)等效应力是三项主应力的组合如s,int即为max(si-sj),si,sj为三项主向应力。
i,j=1,2,3 i≠j即tresca型s,eqv为sqrt(0.5*∑(si-sj)**2),i,j=1,2,3 i≠j即mises型3)个人认为应该采用等小应力来描述应力集中的现象,因为在实际中很难找到真正的单轴拉压的情况,一般结构的受力都没有这么简单,所以在分析的时候需要用等效应力来将各主应力进行转化,因此应该用等效应力来描述应力集中的现象。
4)等效泊松比就是泊松比,等效应力计算时不会用到泊松比,不过在计算mises 等效应变时会用到。
对于泊松比的取值原则应遵循以下两条:a:对于elastic & thermal strains 泊松比取为材料的泊松比;b:对于plastic creep hyperelastic strains 泊松比取为0.5。
ansys时间步长的确定
ANSYS 瞬态动力学分析中的时间步长的选择对于瞬态动力学分析问题,如何选取合适的时间步长,才能保证得到正确的计算结果呢?这是我们在瞬态动力学分析中需要关注的一个问题。
积分时间步长的选取决定了瞬态动力学问题的求解精度:时间步长越小,则计算精度越高。
太大的时间步长会导致高阶模态的响应出错,从而会影响到整体的响应。
但是太小的时间步长会浪费计算资源。
要得到一个较好的时间步长,应该遵循下述原则:(1)分析响应的频率。
时间步长应该小到可以分析结构的响应。
既然结构的动力响应可以看成是一系列模态的组合,时间步长应该可以求解对响应有贡献的最高阶模态。
对NEWMARK 积分方案而言,发现可以使用感兴趣结果的最高阶频率的每个周期内取20个点就可以得到大致合适的解答。
这就是说,ft 201=∆ 上式中,t ∆为时间步长,f 为所关注系统的最高频率。
如果需要计算加速度,则上述时间步长需要更小一些。
对于HHT 时间积分方法,可以使用同样的时间步长。
在使用相同的时间步长和时间积分参数的前提下,HHT 方法比NEWMARK 方法更精确一些。
(2)分析加载的载荷-时间曲线。
时间步长应该足够的小到能跟踪载荷历程。
响应一般要比施加的载荷慢半拍,阶跃载荷尤其如此。
它需要较小的时间步以便能紧密的跟踪载荷的改变。
它应该小到1/180f 会较合适。
(3)分析接触频率。
在包含接触(碰撞)的问题中,时间步长应该小到足以捕捉接触面之间的动力传递。
否则,会产生明显的能量损失,而碰撞将不再是理想弹性的。
时间步长可以由接触频率得到 c Nf t 1=∆ mk f c π21=这里,k是间隙的刚度,m是施加在间隙上的有效质量,N是每个周期的点数目。
要最小化能量损失,每个周期至少需要30个点(N=30)。
如果计算加速度,需要更多的点。
对于缩减法和模态叠加法,至少需要7个点。
如果接触周期和接触质量比全局的瞬态时间和系统质量小很多,则可以使用少于30个点,因为总体响应上的能量损失效果比较小。
ansys动力学瞬态分析详解
§3.1瞬态动力学分析的定义瞬态动力学分析(亦称时间历程分析)是用于确定承受任意的随时间变化载荷结构的动力学响应的一种方法。
可以用瞬态动力学分析确定结构在稳态载荷、瞬态载荷和简谐载荷的随意组合作用下的随时间变化的位移、应变、应力及力。
载荷和时间的相关性使得惯性力和阻尼作用比较重要。
如果惯性力和阻尼作用不重要,就可以用静力学分析代替瞬态分析。
瞬态动力学的基本运动方程是:其中:[M] =质量矩阵[C] =阻尼矩阵[K] =刚度矩阵{}=节点加速度向量{}=节点速度向量{u} =节点位移向量在任意给定的时间,这些方程可看作是一系列考虑了惯性力([M]{})和阻尼力([C]{})的静力学平衡方程。
ANSYS程序使用Newmark时间积分方法在离散的时间点上求解这些方程。
两个连续时间点间的时间增量称为积分时间步长(integration time step)。
§3.2学习瞬态动力学的预备工作瞬态动力学分析比静力学分析更复杂,因为按“工程”时间计算,瞬态动力学分析通常要占用更多的计算机资源和更多的人力。
可以先做一些预备工作以理解问题的物理意义,从而节省大量资源。
例如,可以做以下预备工作:1.首先分析一个较简单模型。
创建梁、质量体和弹簧组成的模型,以最小的代价深入的理解动力学认识,简单模型更有利于全面了解所有的动力学响应所需要的。
2.如果分析包括非线性特性,建议首先利用静力学分析掌握非线性特性对结构响应的影响规律。
在某些场合,动力学分析中是没必要包括非线性特性的。
3.掌握结构动力学特性。
通过做模态分析计算结构的固有频率和振型,了解这些模态被激活时结构的响应状态。
同时,固有频率对计算正确的积分时间步长十分有用。
4.对于非线性问题,考虑将模型的线性部分子结构化以降低分析代价。
<<高级技术分指南>>中将讲述子结构。
§3.3三种求解方法瞬态动力学分析可采用三种方法:完全(Full)法、缩减(Reduced)法及模态叠加法。
ansys中载荷步、载荷子步、时间步的关系
ansys中载荷步、载荷子步、时间步的关系编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(ansys中载荷步、载荷子步、时间步的关系)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为ansys中载荷步、载荷子步、时间步的关系的全部内容。
实际工况=载荷步(时间步)+载荷步(时间步)+。
.。
.载荷步=载荷子步(时间增量)+载荷子步(时间增量)+..。
.。
.实体加载和有限元模型加载的区别:实体加载是不能利用叠加,所以实体加载要手工叠加.对实体是覆盖,有限元模型加载是可以设置的。
有限元加载可以利用fcum进行叠加。
比如,第一个荷载步,对关键点1施加10kn,第二荷载步也对关键点1施加10kn,则这两个荷载步结果是完全一致的。
第一个荷载步,对节点1施加10kn,第二荷载步也对节点1施加10kn,而且用命令fcum,add则第二荷载步是20kn的结果。
加载与载荷步、子步及平衡迭代次数的说明加载与载荷步、子步及平衡迭代次数的说明:一、加载方式的区别实体加载和有限元模型加载的区别:实体加载是不能利用叠加,所以实体加载要手工叠加。
对实体是覆盖,有限元模型加载是可以设置的。
有限元加载可以利用fcum进行叠加.比如,第一个荷载步,对关键点1施加10kn,第二荷载步也对关键点1施加10kn,则这两个荷载步结果是完全一致的。
第一个荷载步,对节点1施加10kn,第二荷载步也对节点1施加10kn,而且用命令fcum,add则第二荷载步是20kn的结果。
实体加载方法的优点:a、几何模型加载独立于有限元网格,重新划分网格或局部网格修改不影响载荷;b、加载的操作更加容易,尤其是在图形中直接拾取时;无论采取何种加载方式,ANSYS求解前都将载荷转化到有限元模型,因此加载到实体的载荷将自动转化到其所属的节点或单元上;二、载荷步及子步这些概念主要用于非线性分析或载荷随时间变化的问题。
ANSYS使用心得BEAM188单元应力时程数据提取方法

ANSYS使用心得BEAM188单元应力时程数据提取方法在ANSYS中,BEAM188单元是用来模拟横截面有限厚度的梁的单元类型。
在实际工程中,我们经常需要知道梁在不同时间点的应力情况,以了解其受力情况。
本文将介绍一种基于APDL命令的方法,用来提取BEAM188单元的应力时程数据。
首先,我们需要在ANSYS中建立梁的有限元模型,并设置好相应的边界条件和加载。
在这个过程中,我们需要注意梁的材料性质、几何尺寸以及加载方式等,这些都会影响到最终的应力分布。
在模型建立完成后,我们需要运行一个静态分析,以得到梁的静态应力。
在ANSYS中,我们可以使用“SOLU”命令来进行静态分析。
在静态分析完成后,我们可以使用以下命令来查看梁的应力分布:```*VWRITE, beam_stress, BEAM, 1, S, LOC, RANGE```其中,beam_stress是一个后处理变量名,用来存储梁的应力数据,BEAM表示只计算梁单元的应力,1表示第一组单元,S表示计算应力场,LOC表示输出位置信息,RANGE表示输出的范围。
通过运行上述命令,我们可以得到梁在不同位置的应力数据。
为了得到不同时间点的应力数据,我们需要使用ANSYS的时程分析功能。
假设我们需要在1秒、2秒和3秒时刻的应力数据,我们可以按照以下步骤进行操作:1.使用“TIME”命令来设置分析的总时间和时间步长。
在这个例子中,我们设置总时间为3秒,步长为1秒。
2.使用“NLSTEP”命令来指定非线性分析的步数。
由于我们只需要在1秒、2秒和3秒时刻的应力数据,所以我们设置步数为33.使用“SOLVE”命令来运行时程分析。
4.运行静态分析的命令来保存每个时间步的应力数据。
我们可以使用如下的APDL命令来保存每个时间步的应力数据:```*VWRITE, beam_stress_1s, BEAM, 1, S, LOC, AT, 1*VWRITE, beam_stress_2s, BEAM, 1, S, LOC, AT, 2*VWRITE, beam_stress_3s, BEAM, 1, S, LOC, AT, 3```以上命令中,beam_stress_1s、beam_stress_2s和beam_stress_3s是用来分别保存1秒、2秒和3秒时刻的应力数据的后处理变量名。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ANSYS 瞬态动力学分析中的时间步长的选择
对于瞬态动力学分析问题,如何选取合适的时间步长,才能保证得到正确的计算结果呢?这是我们在瞬态动力学分析中需要关注的一个问题。
积分时间步长的选取决定了瞬态动力学问题的求解精度:时间步长越小,则计算精度越高。
太大的时间步长会导致高阶模态的响应出错,从而会影响到整体的响应。
但是太小的时间步长会浪费计算资源。
要得到一个较好的时间步长,应该遵循下述原则:
(1)分析响应的频率。
时间步长应该小到可以分析结构的响应。
既然结构的动力响应可以看成是一系列模态的组合,时间步长应该可以求解对响应有贡献的最高阶模态。
对NEWMARK 积分方案而言,发现可以使用感兴趣结果的最高阶频率的每个周期内取20个点就可以得到大致合适的解答。
这就是说,
f
t 201=∆ 上式中,t ∆为时间步长,f 为所关注系统的最高频率。
如果需要计算加速度,则上述时间步长需要更小一些。
对于HHT 时间积分方法,可以使用同样的时间步长。
在使用相同的时间步长和时间积分参数的前提下,HHT 方法比NEWMARK 方法更精确一些。
(2)分析加载的载荷-时间曲线。
时间步长应该足够的小到能跟踪载荷历程。
响应一般要比施加的载荷慢半拍,阶跃载荷尤其如此。
它需要较小的时间步以便能紧密的跟踪载荷的改变。
它应该小到1/180f 会较合适。
(3)分析接触频率。
在包含接触(碰撞)的问题中,时间步长应该小到足以捕捉接触面之间的动力传递。
否则,会产生明显的能量损失,而碰撞将不再是理想弹性的。
时间步长可以由接触频率得到 c Nf t 1=∆ m
k f c π21=
这里,k是间隙的刚度,m是施加在间隙上的有效质量,N是每个周期的点数目。
要最小化能量损失,每个周期至少需要30个点(N=30)。
如果计算加速度,需要更多的点。
对于缩减法和模态叠加法,至少需要7个点。
如果接触周期和接触质量比全局的瞬态时间和系统质量小很多,则可以使用少于30个点,因为总体响应上的能量损失效果比较小。
(4)分析波的传播。
如果对波的传播效果有兴趣,时间步长应该小到可以捕捉穿过单元的的波。
(5)分析非线性。
对于大多数非线性问题,满足前面指导原则的时间步长对于非线性问题也似乎足够的。
不过也有一些例外。
如果结构在载荷下会变硬,则更高阶的频率会被激发,从而这些频率需要纳入计算的范畴。
(6)满足时间步长精度准则。
在每个时间步的最后都满足动力学方程,这会保证在这些离散的时间点上方程的平衡。
通常在中间时间点上平衡并不满足。
如果时间步长足够小,则可以预期,中间状态与平衡状态不会差得很远。
另外,如果时间步长较大,中间状态可能会远离平衡状态。
折半残余基准提供了对于每个时间步的平衡精度的度量方法。
可以使用MIDTOL来选择此准则。
在使用合适的准则计算了时间步长后,对你的分析使最小的值。
通过使用自动时间步长,你可以让ANSYS来确定在计算中何时增加或者减少时间步长。
注意:不要使用太小的时间步长,尤其是在建立初始条件的时候。
太小的时间步长会导致数值上的困难。
小于10的-10次方的步长是不合适的。