STM32+DMA+UART+ADC+内部温度传感器
STM32-内部温度传感器-串口显示-完整程序
STM32F103 内部温度传感器用串口传递到PC上显示程序如下:#include "stm32f10x.h"#include "stm32_eval.h"#include "stm32f10x_conf.h"#include <stdio.h>#define DR_ADDRESS ((uint32_t)0x4001244C) //ADC1 DR寄存器基地址USART_InitTypeDef USART_InitStructure; //串口初始化结构体声明ADC_InitTypeDef ADC_InitStructure; //ADC初始化结构体声明DMA_InitTypeDef DMA_InitStructure; //DMA初始化结构体声明__IO uint16_t ADCConvertedValue; // 在内存中声明一个可读可写变量用来存放AD的转换结果,低12 位有效void ADC_GPIO_Configuration(void);static void Delay_ARMJISHU(__IO uint32_t nCount){ for (; nCount != 0; nCount--);}int main(void){u16 ADCConvertedValueLocal;USART_ART_BaudRate = 115200;USART_ART_WordLength = USART_WordLength_8b;USART_ART_StopBits = USART_StopBits_1;USART_ART_Parity = USART_Parity_No;USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx;STM_EVAL_COMInit(COM1, &USART_InitStructure);/* Enable DMA1 clock */RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);DMA_DeInit(DMA1_Channel1); //开启DMA1的第一通道DMA_InitStructure.DMA_PeripheralBaseAddr = DR_ADDRESS; DMA_InitStructure.DMA_MemoryBaseAddr=(uint32_t)&ADCConver tedValue;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //DMA 的转换模式为SRC模式,由外设搬移到内存DMA_InitStructure.DMA_BufferSize = 1; //DMA缓存大小,1个 DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //接收一次数据后,设备地址禁止后移DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Disable;//关闭接收一次数据后,目标内存地址后移DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //定义外设数据宽度为16位 DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //DMA搬移数据尺寸,HalfWord就是为16位DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //转换模式,循环缓存模式。
stm32 adc工作原理

stm32 adc工作原理
STM32 ADC工作原理
STM32微控制器的ADC(模拟数字转换器)模块可以将模拟
信号转换为数字信号。
ADC是一种重要的外设,用于从外部
传感器或其他模拟源获取数据。
ADC模块的工作包括采样、保持、量化和序列转换等过程。
首先,ADC模块会接收来自外部模拟信号的输入。
这些信号
可以是来自温度传感器、光敏电阻或其他传感器的模拟信号。
接下来,ADC模块会将输入信号通过采样和保持电路进行采样。
采样是指将模拟信号转换为相应的电压值。
保持电路将输入信号的电压保持在一个稳定的水平上,以便进行后续的处理。
然后,ADC模块将采样和保持的电压值进行量化。
量化是指
将连续的模拟信号转换为离散的数字信息。
ADC模块使用一
定的分辨率来表示模拟信号,例如12位或16位。
最后,ADC模块将量化后的数字信息通过序列转换器进行处理。
序列转换器将多个信道的数字信息按照一定的顺序进行转换和存储。
转换的结果可以存储在寄存器中供CPU读取,或
者被DMA直接传输到内存中。
总结来说,STM32 ADC工作原理包括采样、保持、量化和序
列转换等步骤,将外部模拟信号转换为数字信息,以供微控制器进行进一步处理和分析。
Stm32F407IG内部温度传感器测试(CORTEX-M4+ADC+DMA)

Stm32F407IG内部温度传感器测试(CORTEX-M4+ADC+DMA)刚才发了ADC的一般用法,得知stm32内部内置了一个温度传感器,于是趁热调试了一下内部温度传感器。
没有软件滤波,正如手册里所说的,该温度传感器起到一个检测温度变化的作用,如果你想要精确的温度测量,请你外置测温元件...呵呵,测试结果如图:代码如下:/************************************************************Copyright (C), 2012-2022, yin.FileName: main.cAuthor: 小枣年糕Date: 2012\05\01Description: ADC1 DMA tempersensor printfVersion: V3.0IDE: MDK 4.22aHardWare: stm32F407IG HSE = 25M PLL = 168MHistory: V1.0Function: 利用ADC读取芯片内部温度传感器的值***********************************************************/#include<stm32f4xx.h>#include<stdio.h>/*定义ADC1的数据寄存器地址,DMA功能要用到外设的数据地址*ADC1的数据地址为外设基地址+偏移地址,基地址在RM0090 Reference*manual(参考手册)的地址映射表里,为0x40012000,ADC_DR*偏移地址为0x4C,故实际地址为0x40012000+0x4C = 0x4001204C */#define ADC1_DR_Addr ((uint32_t)0x4001204C)__IO uint16_t ADCoverValue;__IO float Temper;void GPIO_Config(void);void ADC_Config(void);void USART_Config(void);void DMA_Config(void);void NVIC_Config(void);void Delay(uint32_t nCount);/* printf函数重定向*/int fputc(int ch, FILE *f);main(){/*在主函数main之前通过调用启动代码运行了SystemInit函数,而这个函数位于system_stm32f4xx.c”。
STM32温度传感器ppt课件
ADC_InitStructure.ADC_ExternalTrigConv =ADC_ExternalTrigConv_None;//禁止触发检测,使用软件触发
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//右对齐 ADC_InitStructure.ADC_NbrOfChannel = 1; //1 个转换在规则序列中 也
器的状态 ADC_StartCalibration(ADC1);//开始指定 ADC 的校准状态 while(ADC_GetCalibrationStatus(ADC1));//获取指定 ADC 的校准程序 ADC_SoftwareStartConvCmd(ADC1, ENABLE);//使能或者失能指定的
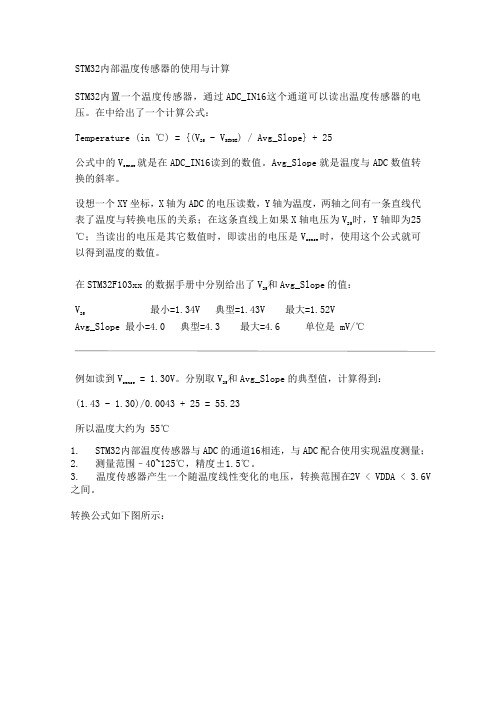
(2)STM32F103ZET6 的内部温度传感器固定的连接 在 ADC1_IN16 上,所以,我们在设置好 ADC1 之后 只要读取通道 16 的 AD 值,就知道温度传感器返回来 的电压值了。根据这个值,我们就可以计算出当前温度。 计算公式如下:
T(℃) ={( V25 - Vsense) /Avg_Slope}+25 公式中: V25=Vsense 在 25 度时的数值(典型值为:1.43V)。 Avg_Slope=温度与 Vsense 曲线的平均斜率(单位为
STM内部温度传感器串口显示完整程序
[80乙NN入fP86TLN£W8乙丄dflCTM丄入门]:各霸尅勒昭护轴兀(g) @ @ @•4r耳5F第誓曹a审嚣敢尊®猱姆W WISS T M 3 2 F 1 0 3 内部温度传感器用串口传递到P C ±显示程序如下:#include "”ttinclude#include "”ttinclude <>ttdefine DR_ADDRESS ((uint32_t) 0x4001244C) n\r〃,a, b, c, d);Delay_ARMJISHU(8000000);}}void ADC_GP 10_Conf i gur at ion (vo id) //ADC 配置函数{GPIO_InitTypeDef GPIO_InitStructure;//PCO作为模拟通道10输入引脚=GPI0_Pin_0; 〃管脚 1=GPIO_Mode_AIN;//输入模式GPI0_Init(GPI0C, &GPI0_InitStructure);//GPI0 组当前STM32芯片内部温度为:00&8°C.当M-STM32芯片內部温度为:0047°C .当前STM32芯片内部温度为;00489 .当前STM32芯片內部温度为:0触TC.当前STM32芯片内部温度为;0047^C .当前STM32芯片内部温度为:如匸TC.当前STM32芯片内部温度为:0047ff C .当前STM32芯片内部温度为:0047^C .当M-STM32芯片內部温度为:0047°C .当前STM32芯片内部温度为;8047^ .当前STM32芯片內部温度为:0酣6°C.关于一些数据格式的定义解释:ttifndef _STM32F10x_TYPE_H#define _STM32F10x_TYPE_Htypedef signed long?s32;typedef signed char?s8;typedef signed long?const sc32;typedef signed short const scl6;typedef signed charconst sc8: typedef volatile signed long?vs32;超级终端显示如下: 当前STM32芯片內部温度为:0046°C .typedef signed short sl6;typedef volatile signed short vsl6:volatile unsigned charconst vuc8;typedef enum {FALSE 二 0, TRUE 二!FALSE} bool: typedef enum {RESET = 0, typedef volatile signed char?vs8:typedef volatile signed long?const vsc32;typedef volatile signed short const vscl6:typedef volatile signed charconst vsc8:typedef unsigned long?u32; typedef unsigned short ul6:typedef unsigned char?u8;typedef unsigned long?const uc32;typedef unsigned short constucl6;typedef unsigned charconst uc8; typedef volatile unsigned long?vu32;typedef volatile unsigned short vul6:typedef volatile unsigned char?vu8;typedef volatile unsigned long?const vuc32:typedef volatile unsignedshort const vucl6;typedefSET = !RESET} FlagStatus, ITStatus;typedef enum {DISABLE = 0, ENABLE = !DISABLE} FunctionalState;ttdefineIS_FUNCTIONAL_STATE(STATE) (((STATE)二二DISABLE) | ((STATE)二二ENABLE)) typedef enum {ERROR = 0, SUCCESS = !ERROR} ErrorStatus;ttdefine U8JIAX? ((u8) 255)ttdefine S8_MAX?((s8)127)ttdefine S8_MIN?((s8)-128)ttdefine U16J1AX? ((ul6) 65535u)ttdefine S16JIAX?((sl6) 32767)ttdefine S16_MIN?((sl6)-32768)ttdefine U32JIAX?ttdefine S32JIAX?ttdefine S32_MIN?ttendif。
STM32-内部温度传感器-串口显示-完整程序

程序如下:
#include"stm32f10x.h"
#include"stm32_eval.h"
#include"stm32f10x_conf.h"
#include<stdio.h>
#defineDR_ADDRESS((uint32_t)0x4001244C)//ADC1DR寄存器基地址
ADC_SoftwareStartConvCmd(ADC1,ENABLE);//连续转换开始,ADC通过DMA方式不断的更新RAM区。
while(1)
{
vu16Temperature,a,b,c,d;
ADCConvertedValueLocal=ADCConvertedValue;
Temperature=(1.43-ADCConvertedValueLocal*3.3/4096)*1000/4.35+25;
typedefvolatilesignedlong??vs32;typedefvolatilesignedshortvs16;typedefvolatilesignedchar??vs8;
typedefvolatilesignedlong??constvsc32;?typedefvolatilesignedshortconstvsc16;?typedefvolatilesignedchar??constvsc8;??
typedefvolatileunsignedlong??vu32;typedefvolatileunsignedshortvu16;typedefvolatileunsignedchar??vu8;
stm32 内部温度传感器
/*
DMA1
channel1
configuration
----------------------------------------------*/
DMA_DeInit(DMA1_Channel1);
DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address;
V25
最小=1.34V 典型=1.43V 最大=1.52V
Avg_Slope 最小=4.0 典型=4.3 最大=4.6 单位是 mV/℃
例如读到 Vsense = 1.30V。分别取 V25和 Avg_Slope 的典型值,计算得到:
(1.43 - 1.30)/0.0043 + 25 = 55.23
* Input
: None
* Output
: None
* Return
: None
************************************************************************
*******/
void ADC_Configuration(void)
{
设想一个 XY 坐标,X 轴为 ADC 的电压读数,Y 轴为温度,两轴之间有一条直线代 表了温度与转换电压的关系;在这条直线上如果 X 轴电压为 V25时,Y 轴即为25 ℃;当读出的电压是其它数值时,即读出的电压是 Vsense 时,使用这个公式就可 以得到温度的数值。
在 STM32F103xx 的数据手册中分别给出了 V25和 Avg_Slope 的值:
/* Enable ADC1 */ ADC_Cmd(ADC1, ENABLE); /* Enable ADC1 reset calibaration register */ ADC_ResetCalibration(ADC1); /* Check the end of ADC1 reset calibration register */ while(ADC_GetResetCalibrationStatus(ADC1)); /* Start ADC1 calibaration */
STM32-ADC结合DMA数据采样与软件滤波处理
STM32 ADC结合DMA数据采样与软件滤波处理2012-03-17 23:53:05| 分类:STM32 | 标签:adc结合dma |字号大中小订阅本文原创于观海听涛,原作者版权所有,转载请注明出处。
作为一个偏向工控的芯片,ADC采样是一个十分重要的外设。
STM32集成三个12位精度18通道的内部ADC,最高速度1微秒,结合DMA可以解放CPU进行更好的处理。
ADC接口上的其它逻辑功能包括:●同步的采样和保持●交叉的采样和保持●单次采样模拟看门狗功能允许非常精准地监视一路、多路或所有选中的通道,当被监视的信号超出预置的阀值时,将产生中断。
由标准定时器(TIMx)和高级控制定时器(TIM1和TIM8)产生的事件,可以分别内部级联到ADC 的开始触发和注入触发,应用程序能使AD转换与时钟同步。
12位ADC是一种逐次逼近型模拟数字数字转换器。
它有多达18个通道,可测量16个外部和2个内部信号源。
ADC的输入时钟不得超过14MHZ,它是由PCLK2经分频产生。
如果被ADC转换的模拟电压低于低阀值或高于高阀值,AWD模拟看门狗状态位被设置。
关于ADC采样与DMA关系,引用网上一段解释:STM32 的优点在哪里?除去宣传环节,细细分析。
STM32 时钟不算快,72MHZ,也不能扩展大容量的RAM FLASH,同样没有 DSP 那样强大的指令集。
它的优势在哪里呢?---就在快速采集数据,快速处理上。
ARM 的特点就是方便。
这个快速采集,高性能的ADC 就是一个很好的体现,12 位精度,最快1uS 的转换速度,通常具备2 个以上独立的ADC 控制器,这意味着,STM32 可以同时对多个模拟量进行快速采集,这个特性不是一般的MCU具有的。
以上高性能的 ADC,配合相对比较块的指令集和一些特色的算法支持,就构成了STM32 在电机控制上的强大特性。
好了,正题,怎末做一个简单的ADC,注意是简单的,ADC 是个复杂的问题,涉及硬件设计,电源质量,参考电压,信号预处理等等问题。
stm32将内部温度传感器的值转为温度的方法

stm32将内部温度传感器的值转为温度的方法将STM32内部温度传感器的值转为温度简介在STM32微控制器内部集成了一个温度传感器,可以用来测量芯片的温度。
然而,这个传感器给出的是一个原始的ADC值,需要进行计算才能得到真实的温度值。
本文将介绍几种常见的方法,用于将STM32内部温度传感器的值转换为温度。
1. 直接采用处理器内部的温度传感器值转换公式步骤:1.读取温度传感器值:在STM32微控制器上,可以通过读取内部参考电压(Vref)和温度传感器的原始ADC值(ADC_value)来获取温度传感器值。
2.计算温度:将原始的ADC值通过一定的公式转换为温度值:Temperature = ((Vref - V_sense) / Avg_Slope) + 25。
其中,Avg_Slope是传感器的平均斜率,V_sense是传感器的电压值。
优点:•实现简单,只需要进行简单的计算即可得到温度值。
•精度较高,可以满足大多数应用场景的需求。
缺点:•依赖于传感器的平均斜率值,可能存在一定的误差。
•无法在实时应用中获得温度值,需要额外的计算和处理。
2. 使用查找表法进行温度转换步骤:1.创建温度查找表:首先,先使用外部传感器测量一系列温度值,并将这些温度值与相应的传感器原始ADC值建立对应关系,得到一张温度查找表。
2.读取温度传感器值:同样地,通过读取内部参考电压(Vref)和温度传感器的原始ADC值(ADC_value)来获取温度传感器值。
3.查找温度:根据传感器原始ADC值,在温度查找表中找到对应的温度值。
优点:•可以提高温度转换的精度和准确性。
•可以在实时应用中获得温度值,无需额外的计算和处理。
缺点:•需要额外的传感器测量和建立温度查找表的过程,增加了开发和测试的工作量。
•如果温度传感器的特性发生改变,需要重新生成温度查找表。
3. 使用温度传感器标定法进行温度转换步骤:1.进行温度传感器标定:使用外部精准度较高的温度传感器进行对比测量,记录传感器原始ADC值和实际温度值的对应关系。
STM32的ADC和DAC问题集锦

1、STM32的DAC转换是什么开始的呢?问:STM32的DAC转换是什么开始的呢?如何利用DAC输出一个脉宽的控的单脉冲呢?答:DAC是通过写入DAC输出寄存器开始的。
另外,如果想要脉冲,使用TIM功能。
2、STM32的DAC输出电压问:DAC的输出电压是如何调节的呢,输入的数字量和输出的电压怎么不成比例呢,输出电压不符合数据手册上提供的公式(DAC输出= VREF X DOR / 4095),求高人指点,程序如下:#include "stm32f10x_lib.h"#define DAC_DHR8R1_Address 0x40007410DAC_InitTypeDef DAC_InitStructure;DMA_InitTypeDef DMA_InitStructure;ErrorStatus HSEStartUpStatus;uc8 Escalator8bit[50] = {0x0, 0x33, 0x66, 0x99, 0xcc, 0xff};void RCC_Configuration(void);void GPIO_Configuration(void);void NVIC_Configuration(void);void Delay(vu32 nCount);int main(void){#ifdef DEBUGdebug();#endifRCC_Configuration();GPIO_Configuration();NVIC_Configuration();TIM_PrescalerConfig(TIM6, 0xF, TIM_PSCReloadMode_Update);TIM_SetAutoreload(TIM6, 0xFF);TIM_SelectOutputTrigger(TIM6, TIM_TRGOSource_Update);DAC_InitStructure.DAC_Trigger = DAC_Trigger_T6_TRGO;DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_None;DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Disable;DAC_Init(DAC_Channel_1, &DAC_InitStructure);DMA_DeInit(DMA2_Channel3);DMA_InitStructure.DMA_PeripheralBaseAddr = DAC_DHR8R1_Address; DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&Escalator8bit;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;DMA_InitStructure.DMA_BufferSize = 6;DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;DMA_InitStructure.DMA_Priority = DMA_Priority_High;DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;DMA_Init(DMA2_Channel3, &DMA_InitStructure);DMA_Cmd(DMA2_Channel3, ENABLE);DAC_Cmd(DAC_Channel_1, ENABLE);DAC_DMACmd(DAC_Channel_1, ENABLE);TIM_Cmd(TIM6, ENABLE);while (1){}}void RCC_Configuration(void){RCC_DeInit();RCC_HSEConfig(RCC_HSE_ON);HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS){FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);FLASH_SetLatency(FLASH_Latency_2);RCC_HCLKConfig(RCC_SYSCLK_Div1);RCC_PCLK2Config(RCC_HCLK_Div1);RCC_PCLK1Config(RCC_HCLK_Div2);RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);RCC_PLLCmd(ENABLE);while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){}RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);while(RCC_GetSYSCLKSource() != 0x08){}}RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA, ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE);}void GPIO_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOA, &GPIO_InitStructure);}void NVIC_Configuration(void){#ifdef VECT_TAB_RAMNVIC_SetVectorTable(NVIC_V ectTab_RAM, 0x0);#else /* VECT_TAB_FLASH */NVIC_SetVectorTable(NVIC_V ectTab_FLASH, 0x0);#endif}void Delay(vu32 nCount){for(; nCount != 0; nCount--);}输出电压为什么不是0~3.3V呢?答1:(u32)&Escalator8bit;你把这个里面的数据强制转换为32位,也就是0x0, 0x33, 0x66, 0x99转换为一个32位的数据,你这样做是不对的。
STM32F40 多通道ADC与温度传感器实现
#include "stm32f4_discovery.h"#include <stdio.h>#define ADC1_DR_Address ((uint32_t)0X4001204C)__IO uint16_t AD_Value[5] = {0,0,0,0,0}; // 0-3 store Voltage value, 4 store temperature value.__IO uint32_t ADC1ConvertedVolt_0 = 0;__IO uint32_t ADC1ConvertedVolt_1 = 0;__IO uint32_t ADC1ConvertedVolt_2 = 0;__IO uint32_t ADC1ConvertedVolt_3 = 0;__IO uint32_t ADC1ConvertedVolt_4 = 0;void ADC1_DMA_Config(void);int main(void){__IO float temp;__IO float temperature;ADC1_DMA_Config();//ADC3_DMA_Config();/* Start ADC1 Software Conversion */ADC_SoftwareStartConv(ADC1);while(1){ADC1ConvertedVolt_0 = AD_Value[0] *3300/0xFFF;ADC1ConvertedVolt_1 = AD_Value[1] *3300/0xFFF;ADC1ConvertedVolt_2 = AD_Value[2] *3300/0xFFF;ADC1ConvertedVolt_3 = AD_Value[3] *3300/0xFFF;temp = (float) AD_Value[4] * (3000/4096) - 760; //$$: temperature = (Vsense - V25)/Avg_slope + 25 = (Vsense - 0.76)/2.5 + 25¡£temperature = temp/2.5 + 25; //Vsense = AD_VALUE * 3000mv/4096. because Avg_slope=2.5mv/0C, SO use 3000mv}}void ADC1_DMA_Config(void){ADC_InitTypeDef ADC_InitStructure;ADC_CommonInitTypeDef ADC_CommonInitStructure;DMA_InitTypeDef DMA_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;/* Enable ADC1, DMA2 and GPIO clocks ****************************************///ADC1 in DMA2 channel_0 , Stream0RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2 | RCC_AHB1Periph_GPIOC, ENABLE); //DMA2,GPIO use AHB1 BUSRCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE); //ADC use APB2 BUSDMA_InitStructure.DMA_Channel = DMA_Channel_0;DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)ADC1_DR_Address; //ADC1 DATA ADDRESSDMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)&AD_Value; //DMA memory base addressDMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralToMemory;DMA_InitStructure.DMA_BufferSize = 5;DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //periphera inc mode: when have multi peripheras need to use DMADMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //need continue visitDMA_InitStructure.DMA_Priority = DMA_Priority_High;DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_HalfFull;DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;DMA_Init(DMA2_Stream0, &DMA_InitStructure);DMA_Cmd(DMA2_Stream0, ENABLE);// config GPIOGPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;GPIO_Init(GPIOC, &GPIO_InitStructure);/* ADC Common Init **********************************************************/ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent; //if doubul ADC channels need to synchronous, set dependent.ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div2;ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_1;ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles; //ADC_delay_between_2_sampling_phasesADC_CommonInit(&ADC_CommonInitStructure);/* ADC1 Init ****************************************************************/ ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;ADC_InitStructure.ADC_ScanConvMode = ENABLE; //if used multi channels set enableADC_InitStructure.ADC_ContinuousConvMode = ENABLE;ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None; //software trig,need function to start:ADC_SoftwareStartConv(ADC3); others: extern trig or timer trigADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //right alignADC_InitStructure.ADC_NbrOfConversion = 5; //when have 7 channels analoy need to conv,set =7ADC_Init(ADC1, &ADC_InitStructure);//Temp sensor ONADC_TempSensorVrefintCmd(ENABLE);ADC_RegularChannelConfig(ADC1, ADC_Channel_10, 1, ADC_SampleTime_15Cycles);ADC_RegularChannelConfig(ADC1, ADC_Channel_11, 2, ADC_SampleTime_15Cycles);ADC_RegularChannelConfig(ADC1, ADC_Channel_12, 3, ADC_SampleTime_15Cycles);ADC_RegularChannelConfig(ADC1, ADC_Channel_13, 4, ADC_SampleTime_15Cycles);ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 5, ADC_SampleTime_480Cycles);ADC_DMARequestAfterLastTransferCmd(ADC1, ENABLE); //if not have this function , can't get new value/* Enable ADC1 DMA */ADC_DMACmd(ADC1, ENABLE); //make enable ADC1 WITH DMA2/* Enable ADC1 */ADC_Cmd(ADC1, ENABLE);}#ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/void assert_failed(uint8_t* file, uint32_t line){/* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* Infinite loop */while (1){}}#endif。
STM32学习笔记,定时器,PWM,ADC,UART,DMA

RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOD,\ ENABLE); //启动 AFIO RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //启动 TIM1 RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
//Step2. GPIO 做相应设置,为 AF 输出 //PA.8/9 口设置为 TIM1 的 OC1 输出口 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);
}
关于 TIM 的操作,要注意的是 STM32 处理器因为低功耗的需要,各模块需要分别独立开启时钟,所以, 一定不要忘记给用到的模块和管脚使能时钟,因为这个原因,浪费了我好多时间阿~~!
STM32 笔记(二)TIM 模块产生 PWM 这个是 STM32 的 PWM 输出模式,STM32 的 TIM1 模块是增强型的定时器模块,天生就是为电机控制而生,可 以产生 3 组 6 路 PWM,同时每组 2 路 PWM 为互补,并可以带有死区,可以用来驱动 H 桥。
STM32内部温度传感器研究与温度测量系统的实现
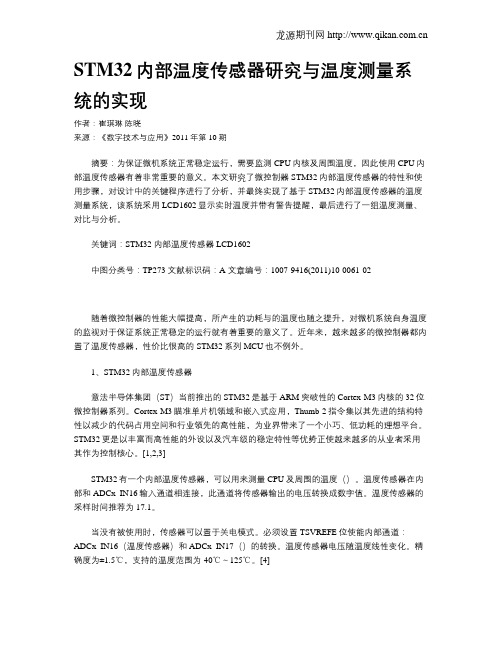
STM32内部温度传感器研究与温度测量系统的实现作者:崔琪琳陈晓来源:《数字技术与应用》2011年第10期摘要:为保证微机系统正常稳定运行,需要监测CPU内核及周围温度,因此使用CPU内部温度传感器有着非常重要的意义。
本文研究了微控制器STM32内部温度传感器的特性和使用步骤,对设计中的关键程序进行了分析,并最终实现了基于STM32内部温度传感器的温度测量系统,该系统采用LCD1602显示实时温度并带有警告提醒,最后进行了一组温度测量、对比与分析。
关键词:STM32 内部温度传感器 LCD1602中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2011)10-0061-02随着微控制器的性能大幅提高,所产生的功耗与的温度也随之提升,对微机系统自身温度的监视对于保证系统正常稳定的运行就有着重要的意义了。
近年来,越来越多的微控制器都内置了温度传感器,性价比很高的STM32系列MCU也不例外。
1、STM32内部温度传感器意法半导体集团(ST)当前推出的STM32是基于ARM突破性的Cortex-M3内核的32位微控制器系列。
Cortex-M3瞄准单片机领域和嵌入式应用,Thumb-2指令集以其先进的结构特性以减少的代码占用空间和行业领先的高性能,为业界带来了一个小巧、低功耗的理想平台。
STM32更是以丰富而高性能的外设以及汽车级的稳定特性等优势正使越来越多的从业者采用其作为控制核心。
[1,2,3]STM32有一个内部温度传感器,可以用来测量CPU及周围的温度()。
温度传感器在内部和ADCx_IN16输入通道相连接,此通道将传感器输出的电压转换成数字值。
温度传感器的采样时间推荐为17.1。
当没有被使用时,传感器可以置于关电模式。
必须设置TSVREFE位使能内部通道:ADCx_IN16(温度传感器)和ADCx_IN17()的转换。
温度传感器电压随温度线性变化。
精确度为±1.5℃,支持的温度范围为-40℃~125℃。
STM32内部温度传感器研究与温度测量系统的实现
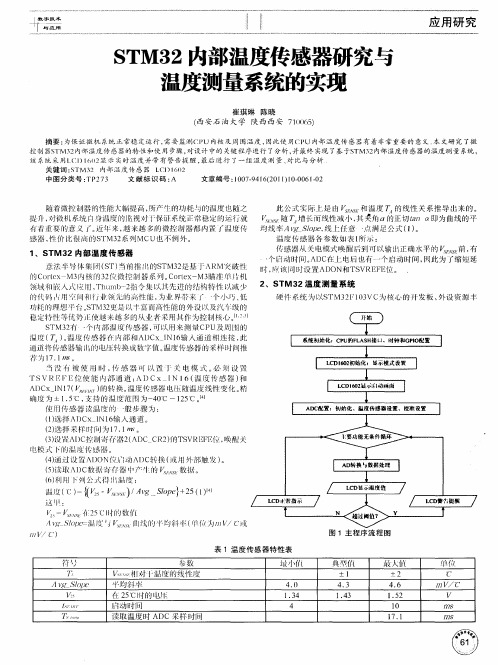
温 度 传感 器 各 参 数 如表 l 永 : 所
‘
传 感 器 从 关 电模 式 I 后 到 可 以输 出 正 确 水 平 的 唤醒 前, 有 个扃 动 时 。 C 上 电后 也 有 个 启 动 u I , AD 在  ̄N 冈此 为 J缩 短 延 , 意 法 半 体 集 闭 ( ) 前 推 …( S M3 是 基 丁 AR S 当 F tf T 2 J M灾 破性 时 , 该 同 时 设 置 AD ON{ T VRE E 。 . HS F 位 的C r x o t M3 骸 的 3 位 微控 制 器 系列 。 otx e 内 2 C re —M3 ̄准 ” 机 H i 、S M 3 T 2温度 测 量 系 统 域 和 嵌 入 』 川 , il 一 指 令 榘 以 其 先 进 『结 构 特 性 以 减 少 2 Th i 2 n b 『 勺 的 代 码 1 伞 叫干 、领 丸 的高 性 能 , 业 界带 来 r ‘ J  ̄ 低 0 ¨ l l , 为 个/ j 、 ,j 硬 仆 系统 为 以S TM3 F 0 VC为 核 心 的 " 发 板 , 设 资 源 丰 2 13 外 功耗 的 想 下 台 。TM3更 足 以 富 而 高 性 能 的 外设 以 及汽 1级 的 S 2 稳 定特 性 等 优 势止 使 越 米越 多的 从业 者 采用 其 作为 控 制 卡 心 。.3 炙 [21 1, S TM3 有 ・ 内部 度 传 感 器 , 以 用 来 测 蕈 C U及 周 嘲 的 2 个 可 P 温 度 ( 。 度 传 感 器 内  ̄ f AD x I 6 入 通 道 相 迮 接 , , r )温 H C —N1输 此 通 道 将 传 感 器 输 … 的 l压 转 换 成 数 彳 值 。 度 传 感器 的 采样 时 间推 乜 温
stm32将内部温度传感器的值转为温度的方法(一)
stm32将内部温度传感器的值转为温度的方法(一)stm32将内部温度传感器的值转为温度介绍在使用stm32单片机进行温度测量时,可以利用其内部的温度传感器来获取当前环境温度值。
本文将详细介绍如何将stm32内部温度传感器的值转换为实际温度。
方法一:使用内部ADC测量1.配置ADC相关寄存器,使其工作在合适的模式下,并设置正确的采样时间。
2.启动ADC转换,并等待转换完成。
3.获取转换结果。
4.使用STM32提供的温度传感器校准值和转换结果,计算出实际温度。
方法二:使用定标曲线1.利用开发板上已知的温度传感器模块,将开发板环境温度和相应的ADC值测量得到一系列的数据点。
2.将这些数据点建立定标曲线,可以使用二次多项式或其他曲线拟合方法来拟合这些数据点。
3.当需要测量温度时,使用内部ADC测量得到的数值,通过定标曲线转换为实际温度。
方法三:使用查找表1.利用开发板上已知的温度传感器模块,将开发板环境温度和相应的ADC值测量得到一系列的数据点。
2.建立一个查找表,将这些数据点以二维数组的形式存储起来,其中一维表示ADC值,另一维表示对应的温度。
3.当需要测量温度时,通过查找表查找对应的ADC值,从而得到实际温度。
方法四:使用外部温度传感器1.购买一款精度较高的外部温度传感器模块,如DS18B20。
2.将外部温度传感器模块连接至stm32单片机的相应引脚。
3.使用stm32提供的GPIO接口读取外部温度传感器的数值。
4.使用外部温度传感器的校准值和读取到的数值计算出实际温度。
总结本文介绍了四种将stm32内部温度传感器的值转换为实际温度的方法:使用内部ADC测量、使用定标曲线、使用查找表以及使用外部温度传感器。
尽管每种方法都有其自己的优点和局限性,但可以根据具体需求选择最合适的方法来实现温度测量。
方法一:使用内部ADC测量1.配置ADC相关寄存器,使其工作在合适的模式下,并设置正确的采样时间。
2.启动ADC转换,并等待转换完成。
stm32 正点原子 温度

stm32 正点原子温度
STM32是一系列由STMicroelectronics开发的32位ARM
Cortex-M微控制器。
正点原子是一家专门从事STM32单片机开发的
公司,他们提供了大量的STM32开发资料、教程和开发板。
关于温度,STM32微控制器通常具有内置的温度传感器,可以用来测量芯
片的温度。
用户可以通过读取传感器的数值来获取芯片当前的温度。
在使用STM32的温度传感器时,需要注意一些细节,比如传感器的
校准和精度,以确保获取到的温度数据准确可靠。
从硬件角度来看,STM32内置的温度传感器通常被连接到芯片
内部的模数转换器(ADC)上。
用户可以通过配置ADC来读取传感器
输出的模拟电压值,并通过一定的计算方法将其转换为摄氏度温度值。
在软件开发中,用户需要编写相应的代码来初始化ADC,并进
行数据转换和处理,最终得到精确的温度数值。
此外,正点原子公司也提供了丰富的关于STM32温度传感器的
应用案例和教程,用户可以参考它们来更好地了解如何在STM32上
使用温度传感器,并将其应用到实际的项目中。
总的来说,STM32微控制器具有内置的温度传感器,用户可以
通过读取传感器数值并进行相应的处理来获取芯片的温度。
正点原子公司提供了丰富的开发资料和教程,帮助开发者更好地利用STM32的温度传感器功能。
通过合理的硬件连接和软件编程,可以实现对芯片温度的准确测量和监控。
STM32学习笔记(14)-用ADC和片内温度传感器测温
STM32学习笔记(14)-用ADC和片内温度传感器测温使用内置温度传感器测量温度学习使用ADC多通道转换方式,验证温度测量的准确性,为以后的工程实践打好基础。
(1) ADC的单次与连续转换ADC转换可以在一次转换后停止,然后再次触发后进行下一次转换;也可以是持续不断地转换下去。
这个是通过设定ADC_CR2的CONT位来确定。
而在ST提供的库里面,是这样来设定的:ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;(2) ADC的扫描模式ADC的扫描模式是用来扫描一组选定的通道的,它们将会被依次转换。
这个在上一份笔记中已说明过。
那么连续转换和扫描转换之间又是什么关系呢?字面上理解,似乎它们都是持续不断地转换啊。
答案是:连续转换的层次比扫描更高,它管着扫描呢。
也就是说,对连续转换来说,它所谓的“一次转换”可并不是指的一个通道的转换结束,而是指的“一组”转换结束,当然,这个“一组”有可能只有一个通道而已。
再说得明确一些:当ADC扫描一次结束以后,如果CONT位是“1”(设定为连续转换方式),那么将继续下一轮的转换。
(3) EOC什么时候产生?我的理解应该是每个通道(Channel)转换结束时都会发生。
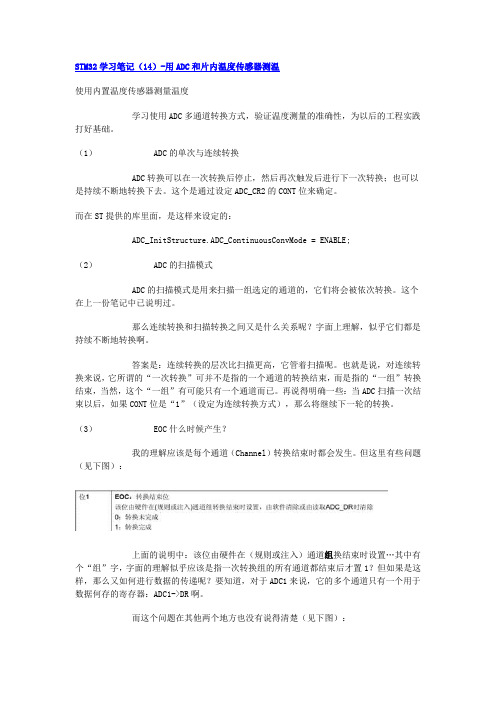
但这里有些问题(见下图):上面的说明中:该位由硬件在(规则或注入)通道组换结束时设置…其中有个“组”字,字面的理解似乎应该是指一次转换组的所有通道都结束后才置1?但如果是这样,那么又如何进行数据的传递呢?要知道,对于ADC1来说,它的多个通道只有一个用于数据何存的寄存器:ADC1->DR啊。
而这个问题在其他两个地方也没有说得清楚(见下图):我们前面讨论了说连续转换是针对一组转换而言的,所以这里所谓的:每个转换后EOC标志被设置,究竟是一组转换结束后呢还是一个通道结束后呢?不明确。
而在扫描模式是这么说的(见下图):这里仅说到:如果设置了DMA位,在每次EOC后…,而并没有说到什么时候会有EOC 产生?是所有扫描结束还是每个通道转换结束?而关于SCAN位又有这样的说明(见下图):注意最后的注:如果分别设置了EOCIE或JEOCIE位,只在最后一个通道转换完毕才会产生EOC或者JEOC中断。
stm32计算温度值插值

stm32计算温度值插值在STM32微控制器中,通常可以使用ADC模块来实现温度传感器的读取。
根据STM32参考手册中的描述,温度传感器的值与实际温度之间存在一定的线性关系。
通过在不同温度下测量ADC转换器的值,可以建立一个温度与ADC值的映射关系。
然后,使用插值算法可以计算出给定ADC值对应的温度。
以下是一个基于线性插值的示例代码:```c#include "stm32xxxx.h"#define ADC_RESOLUTION 4096 // ADC的分辨率#define VREFINT_CAL_ADDR ((uint16_t*) ((uint32_t) 0x1FF80078)) // 内部参考电压校准值地址float getTemperature(uint16_t adcValue) {uint16_t vrefintCal = *VREFINT_CAL_ADDR;float supplyVoltage = 3.3 * vrefintCal / adcValue; // 计算供电电压float slope = 2.5 / 1000; // 温度传感器的斜率(单位:V/°C)int8_t tempCal = 30; // 温度传感器的校准温度(单位:摄氏度)float temperature = (supplyVoltage - 0.76) / slope + tempCal; // 根据转换公式计算温度return temperature;}int main(void) {// 初始化ADC模块与温度传感器// ...// 读取ADC转换值uint16_t adcValue = ADC_GetConversionValue(ADC1);// 计算温度float temperature = getTemperature(adcValue);// 使用温度值进行其他操作// ...while (1) {// 主循环}}```请注意,此示例代码仅为演示目的,实际应用中可能需要根据微控制器型号和温度传感器的具体特性进行适当修改。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
{ tmp=buf[j]; buf[j]=buf[j+1]; buf[j+1]=tmp; } } } if(no>5)//no 为整形,此处是将 no 的前 2/5 丢掉 { cut_no=no/5; } //平均 tmp=0; for(i=cut_no;i<no-cut_no;i++) //只取中间 n-2*cut_no 个求平均 tmp+=buf[i]; return(tmp/(no-2*cut_no)); } void delay(u32 z) { while(z--); }
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; 描 ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //软件启动转换 ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; 对齐 ADC_InitStructure.ADC_NbrOfChannel = 1; ADC_Init(ADC1, &ADC_InitStructure); //1 个通道
ChipOutHalInit(); //片外硬件初始化
for(;;) { if(ADC_Ok==TRUE) { ADC_Ok=FALSE; adc=DigitFilter(ADCCov,16); //滤波,只要数据的中间一段 DMAReConfig();//重新启动 DMA
adc=(1.42 - adc*3.3/4096)*1000/4.35 + 25;//转换为温度值,实际应用中,可考虑用 毫伏为单位,避免浮点运算 printf("T: %d C\r\n",adc);//可以不需要下面的那种操作,很简单的就可将数据从串口 输出!! /* a = adc/1000; b = (adc - a*1000)/100; c = (adc - a*1000 - b*100)/10; d = adc - a*1000 - b*100 - c*10;
USART1_Puts("Temprature is:"); USART1_Putc(a+'0'); USART1_Putc(b+'0'); USART1_Putc(c+'0'); USART1_Putc(d+'0'); USART1_Puts("C \r\n"); */ delay(2234567); } } }
/************************************************************** ** 函数名:DigitFilter ** 功能:软件滤波 ** 注意事项:取 NO 的 2/5 作为头尾忽略值,注意 N 要大于 5,否则不会去头尾 ***************************************************************/ u16 DigitFilter(u16* buf,u8 no) { u8 i,j; u16 tmp; u8 cut_no=0; //排序,将 buf[0]到 buf[no-1]从大到小排列 for(i=0;i<no;i++) { for(j=0;j<no-i-1;j++) { if(buf[j]>buf[j+1])
//数据右
/* 配置通道 16 的采样速度,这里因为是测温,不需要很快,配置为最慢*/ ADC_RegularChannelConfig(ADC1, ADC_Channel_16, 1, ADC_SampleTime_23TempSensorVrefintCmd(ENABLE);
STM32+DMA+UART+ADC+内部温度传感器
说明: 说明:沧海一声笑原创。 沧海一声笑原创。 邮箱: 邮箱:minios@
由于文件很多, 由于文件很多,只列举几个关键的文件。 只列举几个关键的文件。 ADC.c #include "STM32Lib\\stm32f10x.h" u16 ADCCov[16]; volatile bool ADC_Ok=FALSE; static DMA_InitTypeDef DMA_InitStructure; static ADC_InitTypeDef ADC_InitStructure;
//设定外设数据宽度为 16 位 DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //半字 DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //半字 //普通模式 //高优先级 //非内存到内 //设定 DMA 的工作模式普通模式,还有一种是循环模式 DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //设定 DMA 通道的软件优先级 DMA_InitStructure.DMA_Priority = DMA_Priority_High; //使能 DMA 内存到内存的传输,此处没有内存到内存的传输 DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; 存 DMA_Init(DMA1_Channel1, &DMA_InitStructure); DMA_ITConfig(DMA1_Channel1, DMA_IT_TC, ENABLE); 道 1 传输完成中断 //DMA 通
//DMA 的配置 void DMA_Configuration(void) { /* 允许 DMA1 */ RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); /* DMA 通道 1*/ DMA_DeInit(DMA1_Channel1); //指定 DMA 外设基地址 DMA_InitStructure.DMA_PeripheralBaseAddr =(u32)( &(ADC1->DR)); //ADC1 数据寄存器 //设定 DMA 内存基地址 DMA_InitStructure.DMA_MemoryBaseAddr = (u32)ADCCov; ADC 的数组 //外设作为数据传输的来源 DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; 作源头 //指定 DMA 通道的 DMA 缓存大小 DMA_InitStructure.DMA_BufferSize = 16; //外设地址不递增(不变) DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址不增加 //内存地址不递增(不变) DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; 内存地址增加 // //每次 DMA16 个数据 //片内外设 //获取
} main.c /************************************************************ **实验名称:ADC TEMP **功能:使用片内的温度传感器测量温度,并通过串口输出温度值 *************************************************************/ #include "STM32Lib\\stm32f10x.h" #include "hal.h" #include "stdio.h" extern volatile bool ADC_Ok; extern u16 ADCCov[16]; extern void DMAReConfig(void); void delay(u32 z); u16 DigitFilter(u16* buf,u8 no); int fputc(int ch, FILE *f) { //USART_SendData(USART1, (u8) ch); USART1->DR = (u8) ch; /* Loop until the end of transmission */ while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET) { } return ch; } int main(void) { u16 adc; u8 a,b,c,d; ChipHalInit(); //片内硬件初始化
/* Enable DMA1 channel1 */ DMA_Cmd(DMA1_Channel1, ENABLE); } //重新允许 DMA, void DMAReConfig(void) { DMA_DeInit(DMA1_Channel1); DMA_Init(DMA1_Channel1, &DMA_InitStructure); DMA_ITConfig(DMA1_Channel1, DMA_IT_TC, ENABLE); DMA_Cmd(DMA1_Channel1, ENABLE); } stm32f10x_it.c /* Includes ------------------------------------------------------------------*/ #include "STM32Lib\\stm32f10x.h" #include "hal.h" extern volatile bool ADC_Ok; void DMA1_Channel1_IRQHandler(void) { if(DMA_GetITStatus(DMA1_IT_TC1))//通道 1 传输完成中断 { DMA_ClearITPendingBit(DMA1_IT_GL1); //清除全部中断标志 ADC_Ok=TRUE; }