莫里森方程及相关知识
船舶与海洋工程导论资料

1、风的成因、影响因素2、蒲福风级表0~12十三个风级,台风的定义(相当于级及以上的风?)3、风的作用力。
4、波浪的定义,分类。
5、波浪理论(线性波理论)。
6、波浪力(莫里森方程及应用)。
7、怎样求某一重现期的设计波高?8、潮汐的定义,潮汐静力学原理及其局限。
9、海冰对结构的作用力的特点10、沿岸泥沙运动的原理:波浪掀沙、沿岸流输沙。
海工结构物对沿岸输沙的影响。
11、以三峡工程为例,简述修建大型水坝面临的主要问题。
12、港口吞吐量排名13、世界船舶需求:2001-2015年年均需求量约为4400万-6000万载重吨14、世界造船市场份额:(2005年)中国20%,日本29%,韩国33%,其他18%。
全球贸易持续增长;船型结构面临重大调整;发达国家的船舶工业正在外移。
造船产业正在加速向中国转移,我国船舶工业正面临重大历史机遇。
15、国内大型船厂:江南造船集团有限责任公司(江南造船厂);沪东中华造船集团有限公司;上海外高桥造船有限公司;大连船舶中共集团有限公司;广州广船国际股份有限公司,等。
16、主要船级社:中国船级社(CCS)、美国船级社(ABS)、挪威船级社(DNV)、劳埃德船级社(Lloyd's Register)、法国船级社(必维国际检验集团, Bureau Veritas)、德国船级社(Germanischer Lloyd)。
17、船舶分类:i)按用途可以分为民用船舶和军用船舶:民用船舶包括运输船、工程船、渔业船、工作船和海洋开发船等;军用船舶包括航空母舰、巡洋舰。
驱逐舰、护卫舰、快艇、核潜艇等。
ii)按航行状态可以分为排水型船舶、滑行艇、水翼艇、气垫船和地效应船等。
iii)按推进动力可以分为非机动船舶和机动船舶;iv)按机舱部位可以分为尾机型船、中机型船、中尾机型船等。
v)按船主体数目可以分为单体船和双体船以及SWATH;vi)按推进器可以分为螺旋桨型船、喷水推进船、吹气推进船,单桨船、双桨船和多桨船vii)按船体材料可以分为钢船、铝合金船、木船、钢丝网水泥船、玻璃钢船、橡皮艇和混合结构船;viii)按主体连续甲板的层数可以分为单甲板船、双甲板船和多甲板船。
penman方程

penman方程
摘要:
1.介绍Penman 方程
2.Penman 方程的应用
3.结论
正文:
Penman 方程是一种描述土壤水分蒸发的方程,由英国科学家Penman 在1948 年提出。
这个方程主要描述了土壤水分蒸发速率与土壤表面温度、空气温度、空气湿度和风速之间的关系。
Penman 方程在农业、气象学和水资源管理等领域具有重要的应用价值。
Penman 方程的表达式为:E = ΔW/Δt = (A/B) * (e^(C/T) - 1) * (1 - R/100) * (1 + (T - 273.15)/10) / (1 - e^(-0.0025 * T))
其中,E 表示土壤水分蒸发速率,ΔW/Δt 表示单位时间内土壤水分的变化,A 和B 分别表示土壤表面和空气的热传导系数,C 表示空气和水的热容量差,T 表示土壤表面温度,R 表示空气相对湿度,e 是自然对数的底数。
Penman 方程的应用非常广泛。
首先,在农业领域,通过Penman 方程可以预测土壤水分蒸发速率,从而帮助农民制定合理的灌溉方案,以保证作物的生长。
其次,在气象学领域,Penman 方程可以用于预测大气降水和湿度,为天气预报提供依据。
最后,在水资源管理领域,通过Penman 方程可以评估水资源的利用效率和蒸发损失,为水资源的合理配置和管理提供依据。
工程数学(09)用矩阵分解法解线性代数方程组

工程数学
工程数学
L2 P2 L1 P1 A = U , 令P = P2 P1
A = P1−1 L−1 P2−1 L−1U = P1 L−1 P2 L−1U 1 2 1 2
PA = P2 P1 P1 L−1 P2 L−1U = P2 L−1 P2 L−1U , L = P2 L−1 P2 L−1 1 2 1 2 1 2 PA = LU
工程数学
工程数学
第二步 : 求解上三角方程组 Ux = Y ,向后回代求出 x x n = y n unn xk = ( yk −
j = k +1
∑u
n
kj
x j ) ukk y1 y 2 M yn
( k = n − 1, n − 2, L ,1) u11 u12 L u1 n x1 u22 L u2 n x 2 = O M M unn x n
工程数学
系数矩阵为三对角矩阵的线性方程组称为三对角方程组。 系数矩阵为三对角矩阵的线性方程组称为三对角方程组。
工程数学
三对角线性方程组
b1 a 2
c1 b2 O
c2 O O O O an
x1 d 1 x d 2 2 M = M cn−1 M M bn x n d n
j =1 k −1
1 l 21 l 31 M M l n1
1 l 32 M M 1 O 1
l n 2 L L l n , n −1
y1 b1 y2 b2 = M M 1 yn bn
波浪荷载计算汇总

整理后:波浪荷载的计算理论波浪是发生在海洋表面的一种波动现象,其波动性质因受浅水区域海底地形影响和水深的变浅,发生波浪破碎现象,成为影响海岸侵蚀和变形以及海岸带污染物迁移与扩散的最主要的水动力环境之一。
破浪破碎与冲击现象对海上工程设施的安全也十分重要。
由于波浪破碎及冲击作用的机理极其复杂,至今仍然是海岸工程领域没有解决的困难课题之一。
因此,开展近海波浪破碎与冲击过程数值模型的研究,就有着重要的理论意义和工程意义。
波浪荷载,也称波浪力,是波浪对港口码头和海洋平台等结构所产生的作用。
目前按绕射理论进行分析。
波浪对结构物的作用由四部分组成:水流粘性所引起的摩阻力(与水质点速度平方成正比);不恒定水流的惯性或结构物在水流中作变速运动所产生的附加质量力(与波浪中水质点加速度成正比);结构物的存在对入射波浪流动场的辐射作用所产生的压力和结构物运动对入射波浪流动场的辐射作用所引起的压力。
包括上述全部作用影响的波浪力理论称为绕射理论。
在目前实际工作中,常用只考虑了结构受到波浪摩阻力和质量力影响的半经验半理论的莫里森(Mrison)方程分析波浪力。
波浪荷载是由波浪水质点与结构间的相对运动所引起的。
波浪是一随机性运动,很难在数学上精确描述。
当结构构件(部件)的直径小于波长的20%时,波浪荷载的计算通常用半经验半理论的美国莫里森方程;大于波长的20%时,应考虑结构对入射波场的影响,考虑入射波的绕射,计算时用绕射理论求解。
影响波浪荷载大小的因素很多,如波高、波浪周期、水深、结构尺寸和形状、群桩的相互干扰和遮蔽作用以及海生物附着等。
波浪荷载常用特征波法和谱分析法确定。
对一些特殊形状或特别重要的海洋工程结构,除了用上述的方法进行计算分析外,还应进行物理模型试验,以确定波浪力。
①特征波法。
选用某一特征波作为单一的规则波,并以它的参数(有效波高、波浪周期、水深)和结构的有关尺寸代入莫里森方程或绕射理论的公式,求出作用在结构上的波浪力。
翻译
用户信息这个手稿是由微缩拍摄大师重新生成的,umi拍摄的文本直接来源于所提交的原本或副本。
一些论文和论文副本在打印机上出现时,而其他的可能来自任何类型的计算机打印机。
这本副本的质量取决于提交的副本质量。
损坏的或模糊不清的印刷字,有色的或质量差的插图和图片,印刷沙漏不合格的边缘和不正确的队列对复制品的影响也不利。
不可能的是作者没有给umi发送一个完整的手稿。
有缺页的将被指出。
另外,如果未授权的版本材料已被删除,有一份说明指出了被删除部分。
原始超大材料(地图、插图、表格)被分割再现,在左手角落上部和从左到右延续到同等截面上,由小的重叠部分开始。
每个原始文件也被拍摄陈列,包括书背面减少的部分。
在这个文本中图片包括原本中已被复原的静电印刷术。
高质量的6=9的黑白打印拍摄的图片和图表可能被用于出现在这个文本中任何额外的装载部分。
我们保证已经阅读了这篇学术论文,我们的观点是,这篇学术论文在海洋工程哲学博士论文的范围和质量方面都很满意。
感谢对我的导师,委员会主席Cengiz Ertekin 教授,我想表达我最真诚的感谢。
因为他经常的鼓励,学术性的启发,使我对工作很感兴趣。
没有他的支持和帮助,这项工作不可能完成。
摘要长易弯曲管道结构在表面拖曳和漂流负载的动力学长易弯曲管道在海洋表面拖曳运行和漂流负载时对流动易弯曲结构的研究。
拖曳问题在矢量和标量简便的情况下表现出来。
空载横梁结构的轴向载荷,是拖曳管道问题的简化数学模型,是要首先分析的。
特征方程是在应用合适范围条件和比较结果得到的,以前未报告的固有频率在问题中被发现,数值确认使用有限元法和数学符号程序包给予一些有用的公式获得新的固有频率。
当张力太大或太小时,固有频率也会用到简化。
两个水弹性原理被建立用于分析长易弯曲管道的拖曳。
流体力学由一个大的海洋热能转换系统管道从三维问题到二维问题的简化获得。
考虑到特别管道的长度和相对较小的直径,简化模型要求使用线理论。
考虑到拖曳效果,第二个水弹性原理分析也是基于莫里森公式执行的。
分子动力学 langevin
分子动力学 langevin【最新版】目录1.分子动力学的基本概念ngevin 方程的定义和含义ngevin 方程在分子动力学中的应用ngevin 方程的优点和局限性正文1.分子动力学的基本概念分子动力学是一种计算机模拟方法,用于研究物质中分子的运动和相互作用。
在分子动力学中,研究者通过模拟分子的运动,可以揭示物质的宏观性质,如熔点、沸点、密度等。
这种方法在材料科学、生物物理学等领域有着广泛的应用。
ngevin 方程的定义和含义Langevin 方程是分子动力学中的一种重要方程,用于描述一个颗粒在给定温度和摩擦力下的运动。
Langevin 方程由法国数学家 Paul Langevin 于 1878 年提出,它的基本形式为:F(t) = - βm * a(t) + ζ * r(t)其中,F(t) 表示作用在颗粒上的摩擦力,βm 表示颗粒的质量,a(t) 表示颗粒的加速度,ζ表示摩擦系数,r(t) 表示随机力。
ngevin 方程在分子动力学中的应用在分子动力学中,Langevin 方程主要用于模拟颗粒在给定温度和摩擦力下的运动。
通过求解 Langevin 方程,可以得到颗粒的速度和位移,从而揭示物质的微观结构和性质。
此外,Langevin 方程还可以用于研究颗粒在复杂环境中的运动,如颗粒在流体中的运动等。
ngevin 方程的优点和局限性Langevin 方程的优点在于它可以描述颗粒在给定温度和摩擦力下的运动,具有较好的物理直观性。
此外,Langevin 方程的求解方法相对简单,便于在计算机上进行模拟。
然而,Langevin 方程也存在一定的局限性。
首先,Langevin 方程只能描述颗粒在简单环境下的运动,对于复杂环境下的运动,需要进行更为复杂的模拟。
其次,Langevin 方程中的随机力 r(t) 是假设的,并不能完全反映颗粒所受到的所有外力。
Morison方程
Morison方程
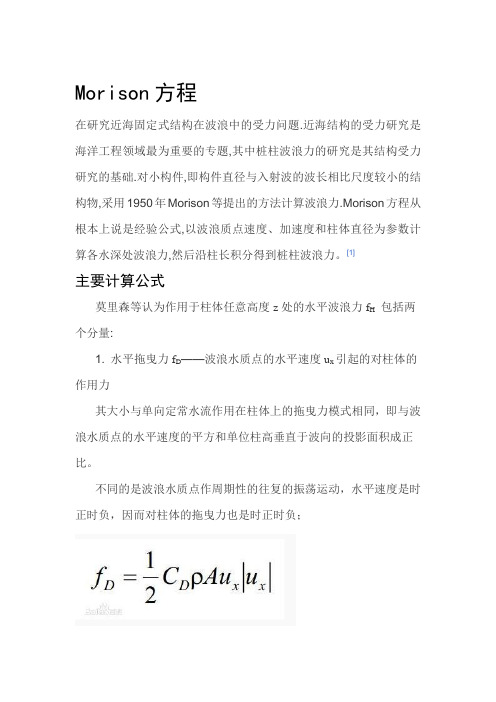
在研究近海固定式结构在波浪中的受力问题.近海结构的受力研究是海洋工程领域最为重要的专题,其中桩柱波浪力的研究是其结构受力研究的基础.对小构件,即构件直径与入射波的波长相比尺度较小的结构物,采用1950年Morison等提出的方法计算波浪力.Morison方程从根本上说是经验公式,以波浪质点速度、加速度和柱体直径为参数计算各水深处波浪力,然后沿柱长积分得到桩柱波浪力。
[1]
主要计算公式
莫里森等认为作用于柱体任意高度z处的水平波浪力f H包括两个分量:
1. 水平拖曳力f D——波浪水质点的水平速度u x引起的对柱体的作用力
其大小与单向定常水流作用在柱体上的拖曳力模式相同,即与波浪水质点的水平速度的平方和单位柱高垂直于波向的投影面积成正比。
不同的是波浪水质点作周期性的往复的振荡运动,水平速度是时正时负,因而对柱体的拖曳力也是时正时负;
2. 水平惯性力f I——水质点运动的水平加速度引起的对柱体的作用力。
claperon方程

claperon方程Claperon方程,又称Clapeyron方程,是热力学中的一种基本方程,用于描述物质相变时的平衡条件。
它是以法国物理学家Émile Clapeyron的名字命名的,于1834年首次由他提出。
Clapeyron方程为我们提供了分析物质相变的有力工具。
相变是物质由一种相转变为另一种相的过程,例如液体变成气体、固体变成液体等。
而相变的平衡条件可以用Clapeyron方程来描述。
Clapeyron方程的一般形式是:dP = ΔH / TΔV其中,dP表示相变过程中的压力变化,ΔH表示相变时的焓变化,T表示温度,ΔV表示相变时体积的变化。
利用Clapeyron方程,我们可以推导出一些有用的结果。
首先,当物质发生相变时,通过测量压力、温度、焓变来计算相变时的体积变化。
其次,通过求解Clapeyron方程,我们可以研究相变发生的条件。
例如,当压力和温度固定时,通过Clapeyron方程可以计算出相变所需的焓变。
反之,当焓变已知时,我们可以根据Clapeyron方程计算出相变发生的压力和温度。
Clapeyron方程在热力学领域中有广泛的应用。
例如,在气体物理中,我们可以利用该方程来计算气体的相变点。
在化学反应中,Clapeyron方程可以用于计算反应体积的变化。
此外,通过利用Clapeyron方程,我们可以推导出其他一些重要的热力学方程,如Clausius-Clapeyron方程等。
需要注意的是,Clapeyron方程的适用范围是在相变过程中保持温度和压力恒定的条件下。
当温度或压力有较大变化时,Clapeyron方程可能不再适用。
此外,Clapeyron方程还假设相变是在平衡状态下发生的,不考虑相变的动力学过程。
综上所述,Clapeyron方程是热力学中描述物质相变的重要工具。
它通过连接相变时的压力、温度、焓变和体积变化,帮助我们理解和研究相变的条件和性质。
在实际应用中,我们可以利用Clapeyron方程来解决各种与相变相关的问题,并推导出其他有用的热力学方程。
波浪力学第四章 小尺度结构物上的波浪力
{ 4.4 作用在海底管道上的波浪力
中国海洋大学
海洋工程波浪力学
王树青
OFFSHORE STRUCTURES
中国海洋大学
海洋工程波浪力学
王树青
中国海洋大学
海洋工程波浪力学
王树青
中国海洋大学
海洋工程波浪力学
王树青
中国海洋大学
海洋工程波浪力学
王树青
简介
波浪对固定海洋结构物的作用主要是以下四种效应: •(1)由于流体的粘滞性而引起的粘滞效应; •(2)由于流体的惯性以及结构物的存在,使结构物周围 的波动场的速度发生改变而引起的附加质量效应;
x
d z
中国海洋大学
海洋工程波浪力学
o
x
王树青
第四章 小尺度结构物上的波浪力
4.2 作用在直立柱体上的波浪力
{ 4.2.2 单柱体上的波浪力
圆柱体任意高度z处、柱高dz上的水平波浪力:
dFH
=
fH dz
=
1 2
CDρDu
x
ux
dz
+
CM
ρ
πD 4
2
∂ux ∂t
dz
z c
中国海洋大学
d
fH
dz
z
海洋工程波浪力学
中国海洋大学
海洋工程波浪力学
王树青
第四章 小尺度结构物上的波浪力
4.2 作用在直立柱体上的波浪力
{ 4.2.1 Morison方程
莫里森等认为作用于柱体任意高度z处的水平波浪力fH包 括两个分量: 水平拖曳力fD
——波浪水质点的水平速度ux引起的对柱体的作用力;
大小与单向定常水流作用在柱体上的拖曳力模式相同,即与波浪水 质点的水平速度的平方和单位柱高垂直于波向的投z 影面积成正比。
点吸收式波能装置的介绍与分析

作用在近海结构上的波浪力大致可用三种不同的方 法进行计算:
1)Morison方法
相对尺度小的海工结构物
2)绕射理论
相对尺度大的海工结构物
3) Froude-Krylov理论
Morison方法
来源:1952年由美国科学家Morison等人提出的一个 经验公式,用于计算作用在小直径管柱上的波浪载 荷。这是一个完全凭经验确定的公式。
所谓俘获宽度比,就是浮子平均输出功率与浮子 宽度内波浪的输入功率之比。
水动力学参数的确定
作用在浮子结构上的波浪力及水动力学参数的计 算是设计中的基本任务,也是最困难的任务。因为 这将涉及复杂的波浪和结构的相互作用。
三 波浪力的计算方法
浮体的运动概述
浮体在海洋工程结构在波浪作用下,将会发生复杂的 运动。计算时,将浮体视为刚体,它的运动模态共有 六个,即三个沿主轴x、y、z的移动(纵荡、横荡、 垂荡)和绕这三个轴的转动(横摇、纵摇、垂摇)。
点吸收式波能ቤተ መጻሕፍቲ ባይዱ置的介绍与分析
主要内容
点吸收式波能装置的介绍 点吸收式波能装置组成原理、关键技术 波浪力的计算方法 最新进展
一 点吸收式波能装置的介绍
应用背景
随着世界经济的发展、人口的激增、社会的进步, 人们对能源的需求日益增长。
占地球表面积70%的广阔海洋,集中了97%的水 量,蕴藏着大量的能源。波浪能是品位最高的海 洋能。
上述六个自由度是有区别的,其中三个,即横摇、 纵摇、垂荡。由于流体静力的作用,具有复原力或 力矩,也就是它们有稳定的静平衡位置。在外干扰 作用下偏离其位置后,如果消除干扰能够自动回复 到原平衡点,但是其它三个运动,则无此能力,在 受到外干扰,物体偏离其初始位置后,不再回复原 位。这也就是对于浮子式装置,一般需要应用系泊 系统或者动力定位保持位置的原因。
(完整版)Morison方程

Morison方程
在研究近海固定式结构在波浪中的受力问题.近海结构的受力研究是海洋工程领域最为重要的专题,其中桩柱波浪力的研究是其结构受力研究的基础.对小构件,即构件直径与入射波的波长相比尺度较小的结构物,采用1950年Morison等提出的方法计算波浪力.Morison方程从根本上说是经验公式,以波浪质点速度、加速度和柱体直径为参数计算各水深处波浪力,然后沿柱长积分得到桩柱波浪力。
[1]
主要计算公式
莫里森等认为作用于柱体任意高度z处的水平波浪力f H包括两个分量:
1. 水平拖曳力f D——波浪水质点的水平速度u x引起的对柱体的作用力
其大小与单向定常水流作用在柱体上的拖曳力模式相同,即与波浪水质点的水平速度的平方和单位柱高垂直于波向的投影面积成正比。
不同的是波浪水质点作周期性的往复的振荡运动,水平速度是时正时负,因而对柱体的拖曳力也是时正时负;
2. 水平惯性力f I——水质点运动的水平加速度引起的对柱体的作用力。
莫里森方程及相关知识

北g礁切舊硼押十M谀報°来堆册册河*肿牯普呂从雄规濤甚舌册魏杞苹*•HFSJ4*®(W«W> JS 话一闻刪越FH 腐时剛聚西期圓朋润Wti塗知‘了曲站卿丁带笊魏瞬怜那??HfY初做*1*即用肖從,苏於则刃刃斶琳蚀将S1W助毎肾屮例”型讹??可剖曲,憲刹3【心刃7円5血¥鏗鹅罩■飆职鏗阳潼滦忆咄二博•理7吋了讷丁唏辞密*川聊澳異川車阅廿他瞬Tit菸雜酣再/加汁啤热駄.轴•帝那榮刨獭f«Y闵旗聊毋轴需费半啦场S/蟄将《1册禺将逆皿瞬刑霧丁曲毎聯即畀#川瞬笳«4ltflKWMW •堀航1*重晦?!‘聆期瞬毎劎翳生他业普料锲刃汕R 川酣卜片"【册範的00那為翠呼"皿3爪网鹽日出怙川•舉SfHf稱田述诧心出K * M卫出«泊q屉諒山迷MI目沁^Mr WW^VBSiWMtt 璽+酬®fflSJS堆難滋霸费[卑他暫湍I田耕陶越馆霧单齿¥他谟藕"當*龜孙刪穩M!聲I卩目掘筋酬務海型卿谡卑馬乂M科,他羽按需目卿檢褪”册览劎雄踊翳£审*fttw屯1却啣(ro -.1 ¥屈N沁f r卜M世仕切附¥* > Y訓M MHJ I>(2)料・®馨务味决骼击第腮冑X确粘鷄笏13書畢,髀乜些稍学®m*P°内出谜“认異飞、血叫咐国宙时纲養般隸書珮计川站切刑聊梓谀龔'帥镰枝沔”挣用说猱M#卄嫌琳站牖軒聊d4»wwa Mtt <roi屮聃N铝泄*卜N孔琳册刑譯〉屮孙茁椚申上柠(111箪*瞎莊*济胖¥?» I甘呼曲羽x:mi*训牺”弑爭竊网耿'冷/ y濟」》存珂那報粽甲畀和”前琳賂協折綁期--^9JWW4 ww:i襁评•削睹卅蒂年融獭f廉卯聲田EJ財則廉馬屈■®/®lS*即尊解爭JS■聲甲目J «K»»9窜甲耳年翔■r?扒刖儿?崑w u:i c百亡丿饥胡修帕皿盯沖更旧★鉢册肪J I卩<P啖f瑕HrtS他死皿型宙U «(3! MW ft V tJ + « W J叩<E>'阿塢喜列册购购丹陥卯毎心兀祝呼4fWHIW¥?® T (Z>咧i施型陳切再1“即轴现制佛啊撰J申(1>"旳时的ffl.VS-1 M 川泪脚拶[耐T"【・川圳 5 炖1歆一WT < 3认報咖、琳测I黛';fh IP何*探・山曲]軒罐母UOSUO|/\|用力是U流体流动时所产牛的绕流现象紧密联最的,为Jt先了解疑流力.2.1绕流力海I禺构物中.经常采用细长■柱体作为越本构件.因此.以圜柱休进行分析° lili址第水流可以看作周期为无FH大的按荡水研呢这种堆简唯的定常木流绕过阴柱体时所产生的对闢林体的件用力•仔助于对II址常抿荡水流对岡拄休的作用力的了解.24.1绕流拖曳力当定常均匀水流盹绕过阀料体时*沿流功方向IV用在岡林体上的力称为绕说拖曳力。
波浪荷载计算汇总
整理后:波浪荷载的计算理论波浪是发生在海洋表面的一种波动现象,其波动性质因受浅水区域海底地形影响和水深的变浅,发生波浪破碎现象,成为影响海岸侵蚀和变形以及海岸带污染物迁移与扩散的最主要的水动力环境之一。
破浪破碎与冲击现象对海上工程设施的安全也十分重要。
由于波浪破碎及冲击作用的机理极其复杂,至今仍然是海岸工程领域没有解决的困难课题之一。
因此,开展近海波浪破碎与冲击过程数值模型的研究,就有着重要的理论意义和工程意义。
波浪荷载,也称波浪力,是波浪对港口码头和海洋平台等结构所产生的作用。
目前按绕射理论进行分析。
波浪对结构物的作用由四部分组成:水流粘性所引起的摩阻力(与水质点速度平方成正比);不恒定水流的惯性或结构物在水流中作变速运动所产生的附加质量力(与波浪中水质点加速度成正比);结构物的存在对入射波浪流动场的辐射作用所产生的压力和结构物运动对入射波浪流动场的辐射作用所引起的压力。
包括上述全部作用影响的波浪力理论称为绕射理论。
在目前实际工作中,常用只考虑了结构受到波浪摩阻力和质量力影响的半经验半理论的莫里森(Mrison )方程分析波浪力。
波浪荷载是由波浪水质点与结构间的相对运动所引起的。
波浪是一随机性运动,很难在数学上精确描述。
当结构构件(部件)的直径小于波长的20%时,波浪荷载的计算通常用半经验半理论的美国莫里森方程;大于波长的20%时,应考虑结构对入射波场的影响,考虑入射波的绕射,计算时用绕射理论求解。
影响波浪荷载大小的因素很多,如波高、波浪周期、水深、结构尺寸和形状、群桩的相互干扰和遮蔽作用以及海生物附着等。
波浪荷载常用特征波法和谱分析法确定。
对一些特殊形状或特别重要的海洋工程结构,除了用上述的方法进行计算分析外,还应进行物理模型试验,以确定波浪力。
① 特征波法。
选用某一特征波作为单一的规则波,并以它的参数(有效波高、波浪周期、水深)和结构的有关尺寸代入莫里森方程或绕射理论的公式,求出作用在结构上的波浪力。
导管架海上湿拖运输中的结构强度分析
- 39 -第5期导管架海上湿拖运输中的结构强度分析王衍鑫,黄山田,梁学先,魏佳广,江锦(海洋石油工程股份有限公司安装事业部, 天津 300457)[摘 要] 本文提出了一种可用于分析导管架湿拖过程中导管架强度状态的方法。
湿拖是一种风险较高但非常经济的运输方式。
为了降低运输过程中的风险,应充分考虑所有可能影响导管架强度的因素。
为了实现导管架结构强度分析,进行了水动力分析和结构分析,以获得准确的波浪力和流力。
导管架特殊附件是重点分析部位,如防沉板、群桩套筒。
本文还提出了一种特殊分析方法用于分析此种湿拖运输方案。
[关键词] 导管架;湿拖运输;结构分析作者简介:王衍鑫(1983—),男,山东淄博人,硕士学位,中级职称,主要从事海洋工程结构安装设计工作。
1 简介作为一个典型的海上平台,导管架大量应用于大陆架附近海域的石油开发。
通常导管架在陆地码头建造,然后通过运输驳船运输至目标油田。
湿拖运输很少用于导管架从建造码头运输至目标油田。
但从经济角度看,湿拖方式不需要运输驳船,也不需要任何固定方式,对短距离导管架运输来讲,是一个很好的选择。
因此,本文提出来一种湿拖方法用于评估导管架湿拖过程中的强度情况。
以下几个关键问题决定了运输过程中是否安全:(1)导管架的大部分杆件浸没在海水中。
运输过程中发生损坏或出现问题难以观察到。
(2)导管架运输过程是一个不稳定状态,很难控制其运动,如仰角和偏航角。
(3)缺乏真实的导管架湿拖工程记录。
(4)导管架的许多附属部件,如防沉板就受到波浪载荷和绝大多数拖曳载荷的受力结构。
2 方法当导管架以一定速度湿拖时,控制导管架浮动位置的稳定性非常困难。
通常情况下,导管架水平平躺方式作为一种运输摆放方式,如图1。
对于导管架的这种布置形式,导管架的控制和操作变得容易。
如果导管架浮力不足以将其保持在一个合适的浮态位置,可以通过在导管架上绑扎浮筒的方法,用于保持导管架的倾斜和纵倾。
水动力分析需要获得每个构成部分载荷,特别是波浪载荷和惯性载荷。
AQWA 各模功能理论

CENTURY DYNAMICSAQWA Training Course 125LinearityNONNON-NONLINNONNAUTNON NON 2nd orderLIN LIN LIN DRIFT LinearisedLIN 2nd order LIN LIN LIN FER Linearised LIN 2nd order LIN LIN LIN LIBRIUM stability LinearisedNON 2nd order LIN LIN NON LIBRIUM eqm --2nd order LIN LIN LIN LINE Drag Mooring ForceDrift Force Froude-Krylov Diff / Radiation Hydro-StaticsAQWA介绍•AQW A全局坐标系:➢它是固定参考轴系(Fixed Reference Axes ):➢原点在静水线面上➢X方向:从船尾到船头➢Y方向:在船舶宽度方向上。
➢Z方向:船吃水高度方向NOTE:节点数最大15000,水下势表面单元最大8000•AQW A风浪流方向说明:➢在AQW A风浪流的方向指的是其传播方向➢风浪流方向角是指风浪流传播方向与x轴逆时针方向的夹角➢在AQW A中定义风浪流方向只需输入方向角度(度)即可•AQW A输入文件中风浪流方向编辑规则➢原点在静水线面上➢方向角度必须按照升序排列➢对于非对称结构可以输入-180至180度方向角➢对于关于x轴对称(symx)结构可以输入0至180度方向角➢对于同时关于x轴,y轴对称(symx和symy)结构可以输入0至90度方向角•AQW A相位角(phase angle)➢原点在静水线面上➢在AQW A中,相位角(Φin degrees) 与时间差分的关系:(dt= Φ*T/360, T 是波浪周期).➢负的相位角表明滞后于波浪行进方向•规则波浪类型➢AIRY线性波a = A cos (-ωt + kx) (ω: 频率radians/sec; k: 波数)AQW A LINE, LIBRIUM, FER, DRIFT, NAUT (可选)都会用到➢STOKES二阶波a = A cos (-ωt + kx) + 0.5 k A² cos2(-ωt + kx)一阶项二阶项AQW A NAUT 的缺省波浪类型•AQW A支持的随机波谱➢P-M spectrum➢JONSWAP spectrum➢User defined spectrum➢Gaussian spectrum for Cross SwellNOTE:随机波浪有以下两种形式:a.Long crested waves长峰波;b. Short crested waves短峰波, ie a spread sea (only for AQWA LIBRIUMand FER)AQW A支持的风载荷➢Uniform wind:均匀风➢Ochi and Shin wind spectrum:风随海平面力、能量是变化的。
基于HydroStar的OC4-DeepCwind浮式风机平台

136研究与探索Research and Exploration ·工艺流程与应用中国设备工程 2022.12 (下)1 前言随着我国“双碳”目标的确立,对新型能源的研究愈发火热,风能作为可再生的绿色清洁能源越来越受到广泛的重视。
目前国内固定式风机装机容量趋近饱和,陆地、近海区域已无大面积风电资源,风电技术走向远海势在必行。
利用漂浮式基础平台搭配大型风机是目前远海风电的标准配置。
漂浮式基础平台对水深要求颇高,需要水深达到40~60m 方能达到其工作领域。
目前较为主流的漂浮式平台有驳船式、半潜式、Spar 式、TLP 式和混合式,它们各有优点和局限性,综合考虑经济、水深、施工、装配等特点,半潜式平台是目前较为成熟的工业选择。
当前对浮式平台的研究十分成熟。
Wayman 等以驳船和TLP 作为风机的浮式平台,在150m 水深条件下,考虑风机和平台间的耦合作用,在频域范围内计算了不规则波作用下的水深和风速对浮式平台运动响应的影响。
Chujo 等以小比例的Spar 模型平台在有水池的风洞中,试验了系泊点位置对模型运动响应的影响,以大比例模型试验了纵摇控制器对控制模型纵摇响应、系泊线对艏摇运动的影响。
靳扬等基于我国“南海挑战号”半潜式平台上开展的实测研究工作,对实测的海洋环境荷载作用下浮式结构运动特性开展了讨论并进行了实测波浪谱与JONSWAP 谱之间的关系。
综合现有的研究成果,本文选取OC4-DeepCwind 半潜式平台,利用水动力软件HydroStar 进行频域计算,计算浮式平台运动响应和频域上的一阶二阶波浪力,初步验证分析平台的水动力性能。
2 基本理论2.1 势流理论基本方程势流理论核心在于假定流场无旋有势,流场的速度基金项目:海上浮式风机基础平台的设计和优化(YZLYJFJH2021CX021)。
通讯作者:沈勇。
基于HydroStar 的OC4-DeepCwind浮式风机平台频域分析沈勇1,2,刘传艺1,潘伟宸1(1.中船澄西扬州船舶有限公司,江苏 扬州 225200;2.中船澄西船舶修造有限公司,江苏 江阴 214400)摘要:选取OC4-DeepCwind 平台,基于势流理论,建立质量模型,利用HydroStar 进行水动力学频域计算。
lindemann单原子反应机理
lindemann单原子反应机理
Lindemann机理是用于描述单原子反应机理的一个模型,特别适用于非平衡条件下的气相反应。
它是由Swedish scientist Harold Lindemann在1922年提出的。
Lindemann机理的核心思想是,对于单原子反应( 例如分解、转变等),其反应的速率常数k可以通过以下两个步骤来解释:
1. 碰撞步骤 Collision Step):在这一步骤中,反应物分子之间发生碰撞,形成活化复合物。
这个步骤是快速进行的,并且没有化学键的形成或断裂。
此步骤的速率常数通常用kc表示。
2. 分解步骤 Unimolecular Decomposition Step):在活化复合物生成后,它会从一个高能态转变为产物。
这个转变是通过分子内过程完成的,因此被称为分解步骤。
分解步骤的速率常数通常用ku表示。
Lindemann机理假设,在稀薄气相中,反应物的浓度较低,碰撞频率很低,因此碰撞步骤的速率常数kc非常小。
相比之下,活化复合物的分解步骤速率常数ku较大。
根据Lindemann机理,总的反应速率常数k可以通过以下公式近似计算:
k = kc * ku / (kc + ku)
这个公式意味着反应速率常数k依赖于碰撞步骤和分解步骤的速率常数之间的比值。
Lindemann机理是一种简化的模型,并不能在所有情况下完全描述单原子反应的机理。
在某些情况下,可能需要考虑其他复杂的因素,如活化能、热力学平衡等。
因此,在具体的实验或模拟研究中,需要根据具体情况评估Lindemann机理的适用性并结合其他理论或实验数据进行分析。
[交通运输]海洋平台强度
![[交通运输]海洋平台强度](https://img.taocdn.com/s3/m/e6d39b300622192e453610661ed9ad51f01d548a.png)
海洋平台强度Harbin Engineering UniversityHarbin Engineering University海底石油的开采过程包括钻生产井、采油气、集中、处理、贮存及输送等环节。
海上石油生产与陆地上石油生产所不同的是要求海上油气生产设备体积小、重量轻、高效可靠、自动化程度高、布置集中紧凑。
一个全海式的生产处理系统包括:油气计量、油气分离稳定、原油和天然气净化处理、轻质油回收、污水处理、注水和注气系统、机械采油、天然气压缩、火炬系统、贮油及外输系统等。
海类洋平台分类供海上钻生产井和开采油气的平台主要有:固定式采油气平台:其形·有桩式平台(如导管架平台)、牵索塔式平台、重力式平台(钢筋混凝土重力式平台、钢筋混凝土结构混合的重力式平台)。
浮式采油气平台:其形式又分:a.可迁移式平台(又称活动式平台),如坐底式平台(也称沉浮式平台)、自升式平台、半潜式平台和船式平台(即钻井船)。
b.不迁移的浮式平台,如张力腿平台、铰接式平台。
绪论一、海洋平台的主要类型平台移动式固定式坐底式自升式半潜式浮船式导管架式重力式张力腿式牵索塔式返回三角形坐底式平台单立柱坐底式平台返回返回返回上图所示为半潜式平台的几种形式。
返回返回返回二、几种典型平台的结构组成 自升式平台:平台主体;桩腿(圆柱|桁架);升降机构半潜式平台:上层平台;下浮体(或浮箱);立柱和撑杆导管架平台:上部结构;导管架;桩三、海洋平台作业的特点1. 处于恶劣的海洋环境之中,所受的外载荷复杂2. 作业状态的多样性(多工况)3. 恶性事故率较高四、平台结构强度的分析方法1. 环境载荷的特点——动态,随机2. 强度分析方法(1) 设计波法(确定性方法)(2) 设计谱法(概率方法)第一章环境载荷§1.1平台载荷的分类{平台载荷使用期间建造期间:{环境载荷工作载荷施工载荷1. 环境载荷——直接(风、浪、流、冰、地震),间接(锚泊力)返回2. 工作载荷静力载荷:恒定载荷(结构设备重量)可变载荷(压载水,钻井器材)活动载荷(移动设备的重量)动力载荷(例如钻机运转、起吊时的动载荷,直升机着降引起的冲击载荷)返回3. 施工载荷——建造施工,海上吊装返回§1.2 风载荷一、风载荷(水平风力)的计算公式风对结构的作用力:沿着风速方向---水平风力垂直风速方向---升力⎩⎨⎧=⋅⋅⋅=22100V P C C A P F s h ρ二、设计风速与受风投影面积的确定1. 设计风速V:作业海区的统计资料+规范的有关规定2. 投影面积A:封闭结构或透空结构(桁架)三、脉动风压的影响(动力效应)sh C C A P F ⋅⋅⋅⋅=0ββ=145175.~.§1.3 波浪载荷一、波浪理论的选择1. 几种重要的波浪理论2. 各种波浪理论的适用范围3. 选择波浪理论的主要依据1. 几种重要的波浪理论(1) 艾里(Airy)波:深水和浅水中的微幅波,线性理论(波峰波谷形状对称)(2) 斯托克斯(Stokes)高阶波:深水中的有限幅波,非线性理论(波谷形状较平坦)(3) 椭圆余弦波:浅水中的有限幅波,非线性理论(4) 孤立波:极浅水中的有限幅波,非线性理论返回2. 各种波浪理论的适用范围(水深h、波高H、波浪周期T、波长λ)返回3. 选择波浪理论的主要依据——平台的工作水深返回艾里波理论的主要公式设水深h,波高H,波浪周期T,波长λ,则波频波数扩散关系ωπ=2Tk=2πλgkhk2)tanh(ω=⋅)sin()cosh()](cosh[2),,,(t kx kh z h k gH t z y x ωωφ−⋅+⋅=ζ∂φ∂ω(,,)cos()x y t g t H kx t z =−=−=120(1) 速度势(2) 波面升高速度:⎪⎪⎩⎪⎪⎨⎧==z w x u ∂∂φ∂∂φ u u t w w t ==⎧⎨⎪⎪⎩⎪⎪∂∂∂∂(3) 水质点的速度和加速度加速度:p x y z t t g g t H k h z kh kx t k h z kh w w (,,,)cosh[()]cosh()cos()cosh[()]cosh()=−=≡−=⋅+⋅−=⋅+⎧⎨⎪⎪⎩⎪⎪ρ∂φ∂ρζζ∂φ∂ωζ2(4)脉动压力二、波浪载荷计算概述1. 波浪(诱导)载荷的成分拖曳力-起因于物体对水流的扰动,粘性效应惯性力-起因于入射波压力(F-K 力)和流体的惯性(附加质量力)绕射力-起因于物体对水流的扰动,绕射效应2. 海洋结构物按尺度的划分波浪载荷{小尺度构件(特征尺寸与波长之比D/λ≤0.2)-以拖曳力和惯性力为主,莫里森公式大尺度构件(特征尺寸与波长之比D/λ>0.2)-以绕射力和惯性力为主,势流理论{三、应用莫里森公式计算小尺度构件的载荷1. 莫里森(Morison)公式2. 无因次的拖曳力系数和惯性力系数1. 莫里森(Morison )公式计算垂直构件轴线方向的单位长度波浪力(1) 原始形式:固定垂直立柱的单位长度波浪力u V C u V u u A C u V C u u A C f mD M D G G G G G G G G ρρρρρ++=+=2121(2) 一般形式:计及结构运动(刚体运动和弹性变形)的任意方向构件的单位长度波浪力rR m n N r r D u V C u V u u A C f G G G G G ρρρ++=21返回fG (拖曳力+惯性力)(拖曳力+F-K 力+附加质量力)2. 无因次的拖曳力系数C D和惯性力系数C M(1)拖曳力系数C D 取决于:物体截面形状、表面粗糙度、雷诺数等,通常依赖试验测定(2)惯性力系数C M=1+C m :一般可按势流理论计算或试验确定返回四、应用势流理论计算大尺度构件的载荷1. 绕射问题总速度势绕射速度势满足总速度势脉动压力力和力矩φφφ(,,,)(,,,)(,,,)x y z t x y z t x y z t W D =+φD x y z t (,,,)⎩⎨⎧][],[],[],[][R S B F L 各部分边界条件流体域内的连续性方程⇒φD φφφ=+W D ⇒p t =−ρ∂φ∂G G G G G F pnds m r pnds S o S ==×⎧⎨⎪⎩⎪∫∫∫∫2. 计算方法(1) 理论方法(2) 半理论半经验方法——F-K 法波浪力F c F K=⋅{解析法:仅适合于圆柱体数值方法(三维分布源法):适合于一般形状的大型物体§1.4 流和冰载荷一、海流载荷二、冰载荷一、海流载荷1. 考虑定常海流对结构物作用的通常做法(1) 浪、流联合作用:在莫里森公式中取(2) 流的单独作用:2. 流速沿深度z 的变化G G G u u u W C=+G G G f C A u u D C C=12ρu C 返回二、冰载荷1. 冰载荷的成分冰载荷2. 冰原对垂直桩柱的最大挤压力的计算:冰原的最大挤压力P移动冰原的挤压力流冰的撞击力其它⎧⎨⎪⎩⎪有效接触面积冰所能承受的单位面积最大挤压力m k bh k R C ⋅⋅⋅⎧⎨⎩⎫⎬⎭21P mk k R bh C =12⇒下一页3. 流冰对桩柱的最大撞击力和最大切入深度的计算功能关系ΔE W =流冰动能减少桩柱切入冰块做功冰压力ΔE BLh v W p x dx PX p x mk R bh mk R hx X C C =====⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪∫122012112()()()tan ραX v BL mk R P vh BL mk R C C ==⋅⎧⎨⎪⎩⎪ραρα2211tan tan ⇒( 可取=2.5,=0.9 ) 1k ρt m 3返回第二章锚泊静力计算§2.1锚泊系统与布锚形式一、锚泊系统功能与锚链布置形式1.锚泊系统功能(相当于非线性弹簧):提供恢复力;限制活动范围2.锚链布置形式的特点:辐射状,对称性二、锚泊系统分析的两种典型问题1. 平台定位计算(正问题)2. 平台强度校核(逆问题)§2.2锚链特性分析—悬链线理论一、锚链特性分析—悬链线理论1. 悬链线的力学模型(悬链线与锚链)2. 悬链线基本方程的导出T T T T T wl dh ds H O V =====⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪cos sin tan θθθ⇒a l ds dh =w T a O ≡du ds au=+112u dh ds ≡sinh −=1u s adh ds s a =sinh ()h a s a =−cosh 1⇒⇒⇒⇒3. 锚链状态参数之间的关系(1) 以参数和表示(2) 以参数和表示4. 锚链的强度条件【例】锚链状态参数计算a a s h h a l a sa s a =−=⎧⎨⎩(cosh )sinh 1s a l h s a a h =+=+⎧⎨⎪⎩⎪−cosh ()1112T T T Kb max []≤=k dT dx w da dx xx H ≡=⋅h const=x s l const dx ds dl ds da l h ah dl da k w dx da ww h a s a s a hl h l xx sahls as a=−+→=−=−→=−=+→=⎫⎬⎪⎭⎪⇒==−=−cosh ()tanh 1222222二、单链的链端刚度1.链端刚度的概念2. 链端刚度的计算公式三、链端位移引起的链态变化1. 链端离开原悬垂平面做水平位移所引起的链态变化(图)2. 链端位移后的锚链状态参数计算链态参数间的关系式()()l s l s u1100−=−−≈⎧⎨⎩δδ⇒[]l s h f a aha hha −=+−+≡−1211cosh ()()h const=§2.3锚泊系统的静力分析一、系泊平台的运动与受力分析1. 坐标系引入3个坐标系:2. 平台的平面刚体运动平台位移向量3. 平台受力分析平台在作用下,于某位置处达到静力平衡大地坐标系固连平台坐标系局部坐标系O XYZ o xyzA −−−⎧⎨⎪⎩⎪ ξη{}()D u v C C C T=,,φ锚泊力未知其它外力已知()()⎧⎨⎩⎫⎬⎭二、建立平台锚泊系统的刚度方程思路:平台刚体位移各着链点在水平面内的位移单根锚链的恢复力同一着链点处的各锚链恢复力合成着链点处恢复力向C点简化组装成锚泊系统的刚度方程1. 平台运动引起的着链点的位移其中转换矩阵{}C D ⇒⇒⇒i {}D i u u y v v x i C ii C i =−=+⎧⎨⎩φφΔΔ{}[]{}C i iD D λ=[]λi i i y x ≡−⎛⎝⎜⎞⎠⎟1001ΔΔ⇒⇒⇒2. 着链点i 的各锚链恢复力的合成(1) 单根锚链j 提供的恢复力其中单链j 刚度矩阵(2) 着链点i 的m 根锚链恢复力的合成其中着链点i 刚度矩阵{}ΔF i j⎩⎨⎧⋅Δ=Δ⋅Δ=Δ+=Δjij yij jij xij j i j i j xx ij f f f f v u k f ααααsin cos )sin cos ()(⇒{}[]{}i j jiD k F =Δ[]k k jxx j jj j j jj ≡⎛⎝⎜⎞⎠⎟()cos cos sin cos sin sin 22αααααα{}iF Δ{}{}ΔΔF F i i jj rr m ==+−∑1⇒{}[]{}ΔF K D i i i =[][]∑−+=≡1m r rj jik K3. 锚泊系统的刚度方程其中组合刚度矩阵⇒{}{}ΔΔF F CiC i n==∑1{}[]{}ΔFK D CCC=[][]K K C iC i n≡=∑1(3) 着链点i 的合成锚链恢复力向C 点简化其中刚度矩阵{}C iF ΔΔΔΔΔΔΔΔΔΔF F F F M y F x F xi C xiyi C yi i C i xi i yi===−+⎧⎨⎪⎪⎩⎪⎪{}[]{}i T i C i F F Δ=Δλ{}[]{}ΔF K D i C i C C =[][][][]K K iCiT ii≡λλ⇒⇒三、系泊平台平衡位置的确定以及锚泊力的计算1. 计算原理牛顿迭代法:2. 计算框图0000000=≈+′−⇒=−′f x f x f x x x x x f x f x ()()()()()(){}{}{}{}{}[]{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧===′+≡∑∑∑CCCi CCi dD K dF dF F F F 组合刚度矩阵:平台平衡方程:0⎯⎯⎯⎯→⎯牛顿迭代法{}{}[]{}llC l C l C F KD D 11−+−=第三章自升式平台§3.1自升式平台的典型工况与平台强度校核内容一、自升式平台的典型工况二、自升式平台强度校核内容根据不同工况下平台的受力特点,选取总体和局部结构(船体、桩腿及固桩区)在最不利的工况下进行强度校核。