att距离计算公式
曼哈顿距离的计算公式
曼哈顿距离的计算公式曼哈顿距离(Manhattan Distance)也被称为“城市街区距离”(City Block Distance),它是一种在几何度量空间中的距离度量方式。
咱们先来说说曼哈顿距离的计算公式。
假设有两个点 P(x1, y1) 和Q(x2, y2) ,那么它们之间的曼哈顿距离就是 |x1 - x2| + |y1 - y2| 。
这里的“| |”表示取绝对值。
比如说,有个小朋友小明,他在一张画满方格的纸上玩耍。
方格的横坐标从左到右依次增大,纵坐标从上到下依次增大。
小明先站在了点 A(2, 3) ,然后他想去点 B(5, 1) 拿一个小玩具。
那按照曼哈顿距离来算,小明要走的距离就是 |2 - 5| + |3 - 1| = 3 + 2 = 5 个方格。
这就好像小明只能沿着方格的边直直地走,不能斜着走,所以他走的路程就是横坐标的距离加上纵坐标的距离。
再比如,咱们想象一个城市的地图,街道都是横平竖直的。
你要从一个地方去另一个地方,只能沿着街道走,不能穿过建筑物。
这时候算你走的距离,用的就是曼哈顿距离的概念。
曼哈顿距离在很多实际问题中都有应用呢。
比如说在物流配送中,送货车要在城市里穿梭,考虑到道路的限制,计算最优路线时就可能用到曼哈顿距离。
还有在计算机算法里,比如某些路径规划、图像识别的问题,曼哈顿距离能帮助我们快速判断两个点之间的相对距离和位置关系。
咱们再回到开头提到的小明在方格纸上玩耍的事儿。
后来呀,小明发现,通过计算曼哈顿距离,他能更快地规划自己在方格纸上的行动路线,找到拿到玩具的最短路径。
这让他觉得数学可真有趣,小小的曼哈顿距离居然有这么大的用处。
总之,曼哈顿距离的计算公式虽然看起来简单,但它在很多领域都发挥着重要的作用,能帮助我们解决不少实际问题呢!。
五个距离的逐差法

五个距离的逐差法距离是指某一物体或空间中两点之间的间隔或差异。
在日常生活中,我们经常使用距离来描述物体的位置和相对关系。
而在数学和物理学中,距离也是一个重要的概念,用于衡量物体之间的远近或相似程度。
本文将介绍五种常见的距离度量方法:欧氏距离、曼哈顿距离、切比雪夫距离、马氏距离和余弦相似度。
一、欧氏距离欧氏距离是最常见的距离度量方法之一,也是我们最常用的直观距离。
它在二维或三维空间中的计算方法如下:给定两个点A(x1, y1)和B(x2, y2),欧氏距离为√((x2 - x1)² + (y2 - y1)²)。
欧氏距离的计算方法可以推广到更高维空间。
欧氏距离适用于连续型数据的度量,例如在机器学习中用于计算样本之间的相似性。
二、曼哈顿距离曼哈顿距离是另一种常见的距离度量方法,它的计算方法与欧氏距离有所不同。
在二维空间中,给定两个点A(x1, y1)和B(x2, y2),曼哈顿距离为|x2 - x1| + |y2 - y1|。
曼哈顿距离的计算方法可以推广到更高维空间。
曼哈顿距离适用于离散型数据的度量,例如在城市规划中用于计算两个位置之间的最短路径。
三、切比雪夫距离切比雪夫距离是一种特殊的距离度量方法,它取各个维度上的差的最大值作为距离。
在二维空间中,给定两个点A(x1, y1)和B(x2, y2),切比雪夫距离为max(|x2 - x1|, |y2 - y1|)。
切比雪夫距离的计算方法可以推广到更高维空间。
切比雪夫距离适用于各个维度上的度量具有不同权重的情况。
四、马氏距离马氏距离是一种基于协方差矩阵的距离度量方法,用于度量两个随机向量之间的相似性。
在二维空间中,给定两个随机向量X和Y,马氏距离的计算方法为√((X - Y)T * C^(-1) * (X - Y)),其中C为协方差矩阵。
马氏距离可以衡量样本在多维空间中的分布差异。
五、余弦相似度余弦相似度是一种常用的度量两个向量之间相似性的方法。
两点间的距离公式

两点间的距离公式在数学中,我们经常需要计算两点之间的距离,无论是在平面上还是在空间中。
为了解决这个问题,数学家们提出了几种距离公式,其中最常用的是欧几里得距离公式和曼哈顿距离公式。
1. 欧几里得距离公式欧几里得距离是计算两点之间最短直线距离的方法,也称为直线距离或欧几里得度量。
它可以用于平面上的任意两点计算。
假设有两个点A(x1, y1)和B(x2, y2),它们之间的欧几里得距离可以表示为:d = √((x2 - x1)² + (y2 - y1)²)其中,`√`表示开平方根,`(x2 - x1)²`表示横坐标之差的平方,`(y2 - y1)²`表示纵坐标之差的平方。
利用这个公式,我们可以轻松计算出平面上任意两点之间的距离。
例如,假设有点A(2, 3)和点B(5, 7),我们可以使用欧几里得距离公式计算出它们之间的距离:d = √((5 - 2)² + (7 - 3)²)= √(3² + 4²)= √(9 + 16)= √25= 5因此,点A和点B之间的距离为5个单位。
2. 曼哈顿距离公式曼哈顿距离是计算两点之间沿着网格(或坐标轴)移动的最短距离的方法,也称为城市街区距离。
它可以被看作是沿着曼哈顿街道行走的距离。
假设有两个点A(x1, y1)和B(x2, y2),它们之间的曼哈顿距离可以表示为:d = |x2 - x1| + |y2 - y1|其中,`|x2 - x1|`表示横坐标之差的绝对值,`|y2 - y1|`表示纵坐标之差的绝对值。
通过这个公式,我们可以简单地计算平面上任意两点之间的曼哈顿距离。
例如,假设有点A(2, 3)和点B(5, 7),我们可以使用曼哈顿距离公式计算它们之间的距离:d = |5 - 2| + |7 - 3|= |3| + |4|= 3 + 4= 7因此,点A和点B之间的距离为7个单位。
综上所述,欧几里得距离和曼哈顿距离是计算两点之间距离的常用公式。
曼哈顿公式

曼哈顿公式曼哈顿公式,也被称为曼哈顿距离或城市街区距离,是一种用于计算两个点在标准坐标系中的距离的方法。
它得名于曼哈顿的街道规划,因为曼哈顿的街道形成了一个规整的方格网络,而曼哈顿公式的计算方式就是通过在这个方格网络中沿着街道行进来确定两点之间的距离。
曼哈顿公式的计算方式非常简单,只需要将两点的横坐标差值的绝对值与纵坐标差值的绝对值相加即可。
即:d = |x1 - x2| + |y1 - y2|。
其中,d表示两点间的曼哈顿距离,(x1, y1)和(x2, y2)表示两个点的坐标。
曼哈顿公式的应用非常广泛。
在城市规划中,曼哈顿公式可以用于确定最佳路径规划,特别适用于城市中存在街道网格的情况。
在物流配送中,曼哈顿公式可以用于计算货物从仓库到目标地的最短路径,帮助提高物流效率。
在电路布线中,曼哈顿公式可以用于计算电路元件之间的物理距离,从而优化布线方案。
除了在实际应用中,曼哈顿公式在算法设计中也有重要的作用。
在机器学习和数据挖掘中,曼哈顿距离常用于聚类算法中的距离度量。
在图像处理中,曼哈顿距离可以用于图像相似度的计算。
在路径规划算法中,曼哈顿距离可以作为启发式函数,用于指导搜索算法的方向选择。
曼哈顿公式的特点是忽略了实际路径的长度,仅仅关注两点之间的直线距离。
这使得曼哈顿公式在某些情况下可能不够准确。
例如,在真实的地理环境中,两点之间可能存在无法直线穿越的障碍物,这时曼哈顿公式计算的距离就不再准确。
此外,在某些特定场景下,其他距离度量方法可能更适合,如欧几里得距离或切比雪夫距离。
曼哈顿公式作为一种简单而有效的距离度量方法,在城市规划、物流配送、电路布线、机器学习等领域发挥着重要作用。
它的计算方式简单明了,应用范围广泛。
然而,我们也需要注意曼哈顿公式的局限性,根据具体应用场景选择合适的距离度量方法,以获得更准确的结果。
GSM中的功率控制
GSM中的功率控制1.1功率控制算法功率控制的主要目的是在保证通话质量的前提下尽量降低发信功率,从而有效地降低网络平均干扰电平。
并节省手机电池。
(本节所涉及到的参数将在下一节“功率控制参数”中详细描述。
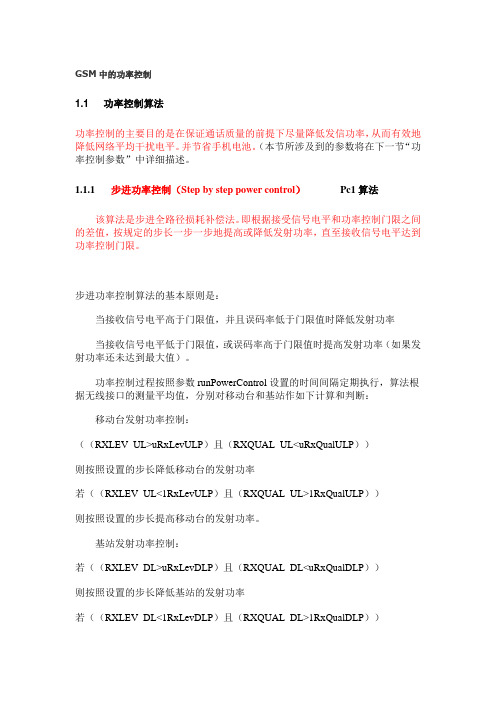
1.1.1步进功率控制(Step by step power control)Pc1算法该算法是步进全路径损耗补偿法。
即根据接受信号电平和功率控制门限之间的差值,按规定的步长一步一步地提高或降低发射功率,直至接收信号电平达到功率控制门限。
步进功率控制算法的基本原则是:当接收信号电平高于门限值,并且误码率低于门限值时降低发射功率当接收信号电平低于门限值,或误码率高于门限值时提高发射功率(如果发射功率还未达到最大值)。
功率控制过程按照参数runPowerControl设置的时间间隔定期执行,算法根据无线接口的测量平均值,分别对移动台和基站作如下计算和判断:移动台发射功率控制:((RXLEV_UL>uRxLevULP)且(RXQUAL_UL<uRxQualULP))则按照设置的步长降低移动台的发射功率若((RXLEV_UL<1RxLevULP)且(RXQUAL_UL>1RxQualULP))则按照设置的步长提高移动台的发射功率。
基站发射功率控制:若((RXLEV_DL>uRxLevDLP)且(RXQUAL_DL<uRxQualDLP))则按照设置的步长降低基站的发射功率若((RXLEV_DL<1RxLevDLP)且(RXQUAL_DL>1RxQualDLP))则按照设置的步长提高移动台的发射功率。
注意:基站发射功率的提高总是要受基站最大发射功率(bsTxPwrMax)的限制。
上式中:RXLEV_UL:基站接收到的上行信号电平RXLEV_DL:移动台接收到的下行信号电平RXQUAL_UL:基站接收到的上行信号质量RXQUAL_DL:移动台接收到的下行信号质量URxLevXXP:上下行信号电平的上门限lRxLevXXP:上下行信号电平的下门限uRxQualXXP:上下行信号质量的上门限lRxQualXXP:上下行信号质量的下门限其中XX表示UL或DL1.1.2直接功率控制(One shot power control) Pc2算法该算法对部分路径损耗作一步到位的补偿。
两点的曼哈顿距离计算公式

两点的曼哈顿距离计算公式曼哈顿距离,这名字听起来是不是有点高大上?其实啊,它在咱们数学的世界里可是个有趣的存在。
先来说说啥是曼哈顿距离。
想象一下,咱们在一个像棋盘一样的城市里,只能沿着水平或者垂直的街道走。
从一个点到另一个点,走过的水平距离加上垂直距离,这就是曼哈顿距离。
比如说,有两个点 A(x1, y1) 和 B(x2, y2) ,那它们之间的曼哈顿距离就是 |x1 - x2| + |y1 - y2| 。
这里的“| |”是绝对值的意思哦,就是不管里面的数是正还是负,最后都变成正数。
我给您举个例子吧。
有一次我带着我小侄子在小区里玩,我们画了一个简单的棋盘格在地上。
我告诉他,咱们就把这当成一个城市,从这头走到那头。
然后我在一个格子里标了个点 A(2, 3) ,在另一个格子里标了点 B(5, 1) 。
我问小侄子,从 A 走到 B ,按照只能横着走和竖着走的规则,得走多远呀?小侄子一开始有点懵,我就慢慢引导他,先算水平方向,从 2 到 5 要走 3 步;再算垂直方向,从 3 到 1 要走 2 步。
所以总的距离就是 3 + 2 = 5 。
小侄子一下子就明白了,那兴奋的小眼神,让我觉得这数学知识教得特有成就感。
那曼哈顿距离有啥用呢?在实际生活里,它的用处可多啦。
比如说规划物流配送的路线,计算在城市里不同地点之间的最短行程。
还有在计算机编程里,比如判断两个像素点的接近程度,或者优化算法的效率,都能用到曼哈顿距离。
再想想看,如果咱们的城市道路不是横平竖直的,而是弯弯曲曲的,那计算距离可就麻烦多啦。
但有了曼哈顿距离,就把问题简单化了不少。
学习曼哈顿距离,不仅能让咱们解决实际问题,还能锻炼咱们的思维能力。
就像搭积木一样,一块一块地积累知识,最后就能搭出漂亮的城堡。
总之,两点的曼哈顿距离计算公式虽然看起来简单,但是背后的用处和意义可不小。
咱们可得好好掌握它,说不定哪天就能派上大用场呢!。
坐标点距离计算公式
坐标点距离计算公式在计算机编程和地理空间分析中,计算坐标点之间的距离是一个常见的需求。
无论是计算两个城市之间的距离,还是在地图上计算两个点之间的距离,我们都需要使用距离计算公式来实现。
欧几里得距离公式在二维平面坐标系中,最常用的坐标点距离计算公式是欧几里得距离公式,也被称为直线距离公式或者欧氏距离公式。
给定两个坐标点P(x1, y1)和Q(x2, y2)。
欧几里得距离公式可以用如下公式表示:d = sqrt((x2 - x1)² + (y2 - y1)²)其中,sqrt表示开平方根的函数。
上述公式根据勾股定理得出,直观上可以理解为计算P点到Q点之间的直线距离。
曼哈顿距离公式曼哈顿距离公式又被称为城市区块距离公式,由于计算两点之间的路径遵循城市街区的路径,因此得名。
给定两个坐标点P(x1, y1)和Q(x2, y2)。
曼哈顿距离可以用如下公式表示:d = |x2 - x1| + |y2 - y1|其中,|x|表示x的绝对值。
曼哈顿距离可以理解为从P点到Q点需要在x轴方向上移动的距离,加上在y轴方向上移动的距离,即为两点之间的距离。
切比雪夫距离公式切比雪夫距离公式也是一种常见的距离计算公式,它可用于计算两点之间的“最大距离”,即在各个方向上最大的距离。
给定两个坐标点P(x1, y1)和Q(x2, y2)。
切比雪夫距离可以用如下公式表示:d = max(|x2 - x1|, |y2 - y1|)切比雪夫距离取最大的绝对差值,可以理解为从P点到Q点需要在x轴和y轴方向上移动的最大距离。
应用举例这些距离计算公式可以应用于许多问题和领域。
以下是一些应用举例:1.导航应用:可以利用这些公式计算出两个地点之间的距离,帮助用户找到最近的路径。
2.数据挖掘:在聚类算法中,可以使用距离计算公式来度量不同数据点之间的相似性。
3.地理信息系统:计算坐标点之间的距离是地理信息系统中的重要功能,用于测量地理空间数据的相关性。
移距量计算公式

移距量计算公式移距量这个概念在物理学和工程学中经常会用到,特别是在涉及到物体的运动、机械结构等方面。
移距量的计算公式呢,得根据具体的情况来定。
先来说说简单的直线运动中的移距量计算。
如果一个物体以恒定的速度 v 沿直线运动,经过时间 t ,那么移距量 S 就可以用公式 S = v × t 来计算。
比如说,一辆汽车以每小时 60 千米的速度匀速行驶 2 小时,那它的移距量就是 60×2 = 120 千米。
再复杂一点,要是物体做匀加速直线运动,这时候移距量的计算就要用到 S = v₀t + 1/2 at²这个公式。
这里的 v₀是初速度, a 是加速度,t 是运动时间。
我给您举个例子吧,就像一个小球从静止开始自由下落,加速度约为 9.8 米每秒平方,下落 5 秒钟,那移距量就是 1/2×9.8×5² = 122.5 米。
还有一种情况,如果物体做的是曲线运动,比如平抛运动,这时候就要把运动分解成水平方向和竖直方向来分别计算移距量。
水平方向移距量 S₁ = v₁t ,竖直方向移距量 S₂ = 1/2gt²。
我记得之前有一次给学生们讲移距量计算公式的时候,有个特别调皮的学生,怎么都理解不了。
我就拿教室的黑板擦当例子,把黑板擦水平扔出去,然后一步一步给他解释每个参数的意义,让他亲自观察和感受。
嘿,您别说,这招还真管用,他终于弄明白了。
总之,移距量的计算并不难,只要搞清楚物体的运动状态,选择合适的公式,就能准确算出移距量。
不管是在我们日常生活中的交通出行,还是在各种工程建设中,移距量的计算都有着非常重要的作用。
所以呀,大家可得好好掌握这个知识点!。
信号强度解释;距离与强度计算

信号强度解释和计算dB、dBm、dBc等概念的解释[纯计数单位]首先,DB 是一个纯计数单位:对于功率,dB = 10*lg(A/B)。
对于电压或电流,dB = 20*lg(A/B).dB的意义其实再简单不过了,就是把一个很大(后面跟一长串0的)或者很小(前面有一长串0的)的数比较简短地表示出来。
如:X=1000000000000000 (共15个0)10lgX=150dBX=0.00000000000000110lgX=-150 dBdBm 定义的是miliwatt。
0 dBm=10lg1m w;dBw 定义watt。
0 dBw = 10lg1W = 10lg1000 mw = 30 dBm。
DB在缺省情况下总是定义功率单位,以10lg 为计。
当然某些情况下可以用信号强度(Amplit ude)来描述功和功率,这时候就用20lg 为计。
不管是控制领域还是信号处理领域都是这样。
比如有时候大家可以看到dBmV 的表达。
注意基本概念在dB,dBm计算中,要注意基本概念。
比如前面说的0dBw =10lg1W= 10lg1000mw= 30dBm;又比如,用一个dBm 减另外一个dBm时,得到的结果是dB。
如:30dBm - 0dBm = 30dB。
dB和dB之间只有加减一般来讲,在工程中,dB和dB之间只有加减,没有乘除。
而用得最多的是减法:dBm 减 dBm 实际上是两个功率相除,信号功率和噪声功率相除就是信噪比(SNR)。
dBm 加 dBm 实际上是两个功率相乘,这个已经不多见(我只知道在功率谱卷积计算中有这样的应用)。
dBm 乘 dBm 是什么,1mW 的 1mW 次方?除了同学们老给我写这样几乎可以和歌德巴赫猜想并驾齐驱的表达式外,我活了这么多年也没见过哪个工程领域玩这个。
曼哈顿距离在高考中的应用

曼哈顿距离在高考中的应用
曼哈顿距离是一种计算两点之间的距离的方法,它的计算方法是将两点在坐标系上的横纵坐标分别相减,然后取绝对值相加。
在高考中,曼哈顿距离常常被用于计算几何和数学建模等方面。
在计算几何中,曼哈顿距离被用于计算点到直线的距离。
当直线的方程为|x + y = c|时,点(x1, y1)到直线的曼哈顿距离为|(x1 + y1 - c)/√2|。
通过计算曼哈顿距离,我们可以轻松地求解点到直线的距离,从而解决一些实际问题。
在数学建模中,曼哈顿距离被用于计算城市间的距离。
因为在城市中,由于道路和建筑物的限制,我们不能简单地使用欧几里得距离来计算两个城市之间的距离。
因此,曼哈顿距离成为了更实际的计算方法,它可以更好地反映出城市间的实际距离。
总之,曼哈顿距离在高考中的应用非常广泛,我们需要熟练掌握它的计算方法和应用场景,从而在考试中更好地解决问题。
- 1 -。
LTE网络中TA的概念及距离计算

在GSM网络中,1TA表征的间隔大约在550m,那末在LTE网络中TA饬令对应间隔是如何计算?之袁州冬雪创作(在LTE网络中有一个最基本的时间单元:Ts,无线帧长(=307200*Ts)、时隙长度(=15360*Ts)、循环前缀长度(=144*Ts或者512*Ts)都是通过TS定义的.那末Ts值是多少呢?下面等式明白给出了Ts的定义.Ts =1/(15000*2048) 单位是:秒计算成果大约时间为32.6纳秒.规范中定义了Ts公式,Ts 的含义如下.LTE系统中OFDM符号生成所采取的FFT SIZE为2048(以20MHZ带宽为例),采样频率为15kHz,那末20M 带宽的采样率=15kHz*2048=3.072MHz,这样Ts可以懂得为OFDM符号的采样周期,即一个OFDM符号的周期为Ts=1/15000*2048 )* 首先,TA表征的是UE与天线端口之间的间隔.1Ts对应的时间提前量间隔等于:(3*10^8*1/(15000*2048))/2=4.89m.含义就是间隔=传播速度(光速)*1Ts/2(上下行途径和).TA饬令值对应的间隔都是参照1Ts来计算的.* 在随机接入过程中:eNodeB丈量到上行PRACH前导序列,在RAR(随机接入响应)的MAC payload中携带11bit信息,TA的范围在0~1282之间,根据RAR(随机接入响应)中TA值,UE调整上行发射时间Nta=TA*16Ts,值恒为正.例如:TA=1,那末Nta=1*16Ts,表征的间隔为16*4.89m=78.12m,同时可以计算得到在初始接入阶段,UE 与网络的最大接入间隔=1282*78.12m=100.156km.* 在业务停止中:周期性的TA饬令在Mac层的信息为6bit,即TA的范围在0~63之间.TA饬令表征Nta的调整量.Nta_新 = Nta_旧 +(TA31)*16,时间提前量值可以为正或负.根据公式可以算出最小的TA间隔为31*16*4.89m=2.42Km,最大TA间隔为32*16*4.89m=2.5Km.1. What is TAUE从网络侧接纳TA饬令,调整上行PUCCH/PUSCH/SRS的发射时间,目标是为了消除UE之间分歧的传输时延,使得分歧UE的上行信号到达eNodeB的时间对齐,包管上行正交性,降低小区内干扰.TA: Timing Advance, 定时提前,一般用于UE上行传输,指为了将UE上行包在希望的时间到达eNB,预估由于间隔引起的射频传输时延,提前相应时间发出数据包.TAC: Timing Advance Command,定时提前饬令,eNB通过发送TAC给UE,告知UE定时提前的时间大小.2. Why need TA上行传输的一个重要特征是分歧UE在时频上正交多址接入(orthogonal multiple access),即来自同一小区的分歧UE的上行传输之间互不干扰.为了包管上行传输的正交性,防止小区内(intracell)干扰,eNodeB要求来自同一子帧但分歧频域资源(分歧的RB)的分歧UE的信号到达eNodeB的时间基本上是对齐的.eNodeB只要在CP(Cyclic Prefix)范围内接纳到UE所发送的上行数据,就可以够正确地解码上行数据,因此,上行同步要求来自同一子帧的分歧UE的信号到达eNodeB的时间都落在CP之内.为了包管接纳侧(eNodeB侧)的时间同步,LTE提出了上行定时提前(Uplink Timing Advance)的机制.在UE侧看来,timing advance实质上是接纳到下行子帧的起始时间与传输上行子帧的时间之间的一个负偏移(negative offset).eNodeB通过适当地节制每一个UE的偏移,可以节制来自分歧UE的上行信号到达eNodeB的时间.对于离eNodeB较远的UE,由于有较大的传输延迟,就要比离eNodeB较近的UE提前发送上行数据.图1 上行传输的timing对齐图1(a)中指出了不停止上行定时提前所造成的影响.从图1(b)中可以看出,eNodeB侧的上行子帧和下行子帧的timing是相同的,而UE侧的上行子帧和下行子帧的timing之间有偏移.同时可以看出:分歧UE有各自分歧的uplinktiming advance,也即unlink timing advance是UE级的配置.3. How measure TAeNodeB通过丈量UE的上行传输来确定每一个UE的timingadvance值.因此,只要UE有上行传输,eNodeB便可以用来估计timing advance值.实际上,UE发送的任何信号(SRS/DMRS/CQI/ACK/NACK/PUSCH等)都可用于丈量timingadvance.在随机接入过程中,eNodeB通过丈量接纳到的preamble来确定timing advance值.4. When send TA上行同步的粒度为16Ts(0.52 ms).关于Ts,见36.211的第4章.上行timing的不确定性正比于小区半径,每1 km有大约6.7μs的传输延迟(6.7μs / km),LTE中小区最大半径为100 km,故最大传输延迟接近0.67 ms.上行同步的粒度为Ts(0.52 ms),故TA的最大值约为(0.67 * 1000)/0.52 ≈1288.(TA的最大值为1282,应该是更切确的计算,但计算方法就是这样的,当然还要将解码时间思索在内)eNodeB通过两种方式给UE发送TimingAdvance Command:1. 在随机接入过程,通过RAR的Timing Advance Command字段发送给UE这中情况下,eNodeB通过丈量接纳到的preamble来确定timing advance值,RAR的Timing Advance Command字段共11 bit,对应TA索引值的范围是0~1282.图2 MAC RARfeild对于随机接入而言,TA值乘以16Ts,就得到相对于当前上行timing所需的实际调整值NTA=TA*16(单位为Ts).我称这个过程为“初始上行同步过程”.2. 在RRC_CONNECTED态,通过TAC MACCE发送TA给UE虽然在随机接入过程中,UE与eNodeB取得了上行同步,但上行信号到达eNodeB的timing可以会随着时间发生变更:高速移动中的UE,例如运行中的高铁上的UE,其与eNodeB的传输延迟会不竭变更;当前传输途径消失,切换到新的的传输途径.例如在建筑物密集的城市,走到建筑的转角时,这种情况就很可以发生;UE的晶振偏移,长时间的偏移积累可以导致上行定时出错;由于UE移动而导致的多普勒频移等.因此,UE需要不竭地更新其上行定时提前量,以坚持上行同步.LTE中,eNodeB使用一种闭环机制来调整上行定时提前量.eNodeB基于丈量对应UE的上行传输来确定每一个UE的timingadvance值.因此,只要UE有上行传输,eNodeB便可以用来估计timing advance值.实际上,UE发送的任何信号(SRS/DMRS/CQI/ACK/NACK/PUSCH等)都可用于丈量timingadvance.如果某个特定UE需要校正,则eNodeB会发送一个Timing Advance Command 给该UE,要求其调整上行传输timing.该Timing Advance Command 是通过Timing Advance Command MAC control element发送给UE的.Timing Advance Command MAC controlelement由LCID值为11101(见36.321的Table 6.2.11)的MAC PDU subhead指示,且其布局如下(R暗示预留bit,设为0):图3:TimingAdvance Command MAC control element可以看出,Timing Advance Command字段共6 bit,对应TA索引值TA的范围是0~63.UE侧会保管最近一次timing advance调整值NTA,old,当UE收到新的Timing Advance Command而得到TA后,会计算出最新的timing advance调整值NTA,new = NTA,old + (TA31) * 16 (单位为Ts).我称这个过程为“上行同步更新过程”.5. Related paramterseNodeB会通过RRC信令给UE配置一个timer(在MAC层,称为timeAlignmentTimer),UE使用该timier在MAC层确定上行是否同步.需要注意的是:该timer有Cellspecific级别和UEspecific级别之分.eNodeB通过SystemInformationBlockType2的timeAlignmentTimerCommon字段来配置的Cellspecific级此外timer;eNodeB通过MACMainConfig的timeAlignmentTimerDedicated字段来配置UEspecific级此外timer.6. UE behavior如果UE在子帧n收到Timing Advance Command,则UE会从子帧n + 6开端应用该timing调整值.如果UE在子帧n和子帧n + 1发送的PUCCH/PUSCH/SRS由于timing调整的原因出现重叠,则UE 将完全发送子帧n的内容,而不发送子帧n + 1中重叠的部分.UE收到Timing Advance Command后,会调整PCell的PUCCH/PUSCH/SRS的上行发送时间.而SCell的PUSCH/SRS(SCell不发送PUCCH)的上行发送时间调整量与PCell相同.(见36.213的4.2.3节)从上面的先容可以看出,PCell和SCell共用一条Timing Advance Command在载波聚合中,UE可以需要往多个小区(或称为component carrier)发送上行数据,在实际上,由于分歧小区的物理位置(interband CA)可以分歧,每一个小区都需要给该UE发送各自的Timing Advance Command.但是这种类型的安排其实不罕见,载波聚合的小区通常物理位置上相近且同步,因此为了简化LTE的设计,所有聚合的小区共用一条timing advance command.前面已经先容过,上行定时提前的调整量是相对于接纳到的下行子帧的timing的,因此在UE没有收到Timing Advance Command的时候,UE需要跟踪下行timing的变更,以便自动调整上行传输的timing.(详见36.133的7.1.2节)7. Out of syncUE在MAC层如何断定上行同步/失步(详见36.321的5.2节):eNB会通过RRC信令给UE配置一个timer(在MAC层,称为timeAlignmentTimer),UE使用该timier在MAC层确定上行是否同步.需要注意的是:该timer有Cellspecific级别和UEspecific级别之分.eNodeB通过SystemInformationBlockType2的timeAlignmentTimerCommon字段来配置的Cellspecific级此外timer;eNodeB通过MACMainConfig的timeAlignmentTimerDedicated字段来配置UEspecific级此外timer.如果UE配置了UEspecific的timer,则UE使用该timer 值,否则UE使用Cellspecific的timer值.当UE收到Timing Advance Command(来自RAR或Timing Advance Command MAC controlelement),UE会启动或重启该timer.如果该timer超时,则认为上行失步,UE会清空HARQ buffer,通知RRC层释放PUCCH/SRS,并清空任何配置的DL assignment和UL grant.当该timer在运行时,UE认为上行是同步的;而当该timer没有运行,即上行失步时,UE在上行只能发送preamble.还有一种情况下,UE认为上行同步状态由“同步”变成“分歧步”:非同步Handover.8. eNB implementation由于分歧的厂商实现方式可以分歧,这里只先容一些可鉴戒的做法.(1)由于UE必须在timeAlignmentTimer 超时之前接纳到Timing Advance Command,否则会认为上行失步.所以eNodeB需要包管在该timer时间范围内(通常要比该timer小,因为要预留一些时间给传输延迟和UE 编解码等)给UE发送Timing Advance Command,以便UE 更新上行定时偏重启该timer.所以eNodeB必须保管最近一次成功地给该UE发送了Timing Advance Command(即eNodeB收到了对应下行传输的ACK)的子帧号,以便计算该时间范围.(2)从(1)中可以看出,在eNodeB侧在MAC层也应该为每一个UE维护一个近似timeAlignmentTimer的timer,以包管在该timer超时之前给UE发送Timing Advance Command.eNodeB何时启动/重启该timer呢?个人认为可以在UE随机接入成功中后启动,并在收到对应Timing Advance Command MAC controlelement的ACK/NACK后重启.注意timer的起始位置应该从最近一次成功地给该UE发送了Timing Advance Command的子帧(而不是收到对应ACK的子帧).(3)从上面的先容可以看出, UE在子帧n 收到Timing Advance Command后,会从子帧n + 6才开端应用该timing调整值.也就是说,eNodeB在子帧n发送了某个UE的Timing Advance Command之后,在子帧n + 6之前(不包含n + 6子帧)的时间内,是不会去丈量该UE 的上行timing的.(4)在子帧n + 6之后,eNodeB可以需要丈量多个上行timing瞬时值以作平均处理,以便得到最终的调整量,也就是说,eNodeB可以在n + 6子帧后的某段时间内,是不会发送Timing Advance Command的.当丈量完毕后,eNodeB在之后的某个子帧将Timing Advance Command MAC control element发给UE.(5)eNodeB在物理层(L1层)应该也会断定UE在上行是否同步(详细如何断定我也不清楚,有位读者先容过该厂家的实现机制,供大家参考:物理层会根据UL信号来计算sinr(也用于估算TA 值),如果算出的sinr值过低,物理层就会认为UL 失步),如果分歧步,应告知MAC层.。
坐标点算距离公式是什么

坐标点算距离公式是什么在数学和计算机科学领域,计算坐标点之间的距离是一个常见的问题。
距离公式是一种用于计算两个坐标点之间距离的数学公式。
本文将介绍三种常见的距离公式:欧几里得距离、曼哈顿距离和切比雪夫距离。
欧几里得距离欧几里得距离,也称为直线距离或欧氏距离,是最常见的距离度量方式之一。
它基于两点之间直线的长度来计算距离。
在二维空间中,欧几里得距离的计算公式为:distance = sqrt((x₁ - x₂)² + (y₁ - y₂)²)其中(x₁, y₁)是第一个点的坐标,(x₂, y₂)是第二个点的坐标。
欧几里得距离的计算公式也可以扩展到三维或更高维度的空间。
曼哈顿距离曼哈顿距离,也称为城市街区距离或L1距离,是另一种常见的距离度量方式。
它基于两点之间在水平和垂直方向上的绝对距离之和来计算距离。
在二维空间中,曼哈顿距离的计算公式为:distance = |x₁ - x₂| + |y₁ - y₂|其中(x₁, y₁)是第一个点的坐标,(x₂, y₂)是第二个点的坐标。
和欧几里得距离不同,曼哈顿距离忽略了斜对角方向上的距离。
切比雪夫距离切比雪夫距离是以数学家彼得·切比雪夫命名的一种距离度量方式。
它基于两点之间在各个维度上的最大差值来计算距离。
在二维空间中,切比雪夫距离的计算公式为:distance = max(|x₁ - x₂|, |y₁ - y₂|)其中(x₁, y₁)是第一个点的坐标,(x₂, y₂)是第二个点的坐标。
切比雪夫距离可以看作是曼哈顿距离的一种特殊情况,其中允许斜对角方向上的移动。
总结本文介绍了三种常见的坐标点距离度量方式:欧几里得距离、曼哈顿距离和切比雪夫距离。
欧几里得距离计算两点之间的直线距离,曼哈顿距离计算两点之间在水平和垂直方向上的绝对距离之和,切比雪夫距离计算两点之间在各个维度上的最大差值。
根据具体的场景和需求,可以选择适合的距离公式来计算坐标点的距离。
距离计算方法总结

距离计算⽅法总结计算推荐对象的内容特征和⽤户模型中兴趣特征⼆者之间的相似性是推荐算法中⼀个关键部分 ,相似性的度量可以通过计算距离来实现在做很多研究问题时常常需要估算不同样本之间的相似性度量(Similarity Measurement),这时通常采⽤的⽅法就是计算样本间的“距离”(Distance)。
采⽤什么样的⽅法计算距离是很讲究,甚⾄关系到分类的正确与否。
本⽂的⽬的就是对常⽤的相似性度量作⼀个总结。
本⽂⽬录:1. 欧⽒距离2. 曼哈顿距离3. 切⽐雪夫距离4. 闵可夫斯基距离5. 标准化欧⽒距离6. 马⽒距离7. 夹⾓余弦8. 汉明距离9. 杰卡德距离 & 杰卡德相似系数10. 相关系数 & 相关距离11. 信息熵1. 欧⽒距离(Euclidean Distance)欧⽒距离是最易于理解的⼀种距离计算⽅法,源⾃欧⽒空间中两点间的距离公式。
(1)⼆维平⾯上两点a(x1,y1)与b(x2,y2)间的欧⽒距离:(2)三维空间两点a(x1,y1,z1)与b(x2,y2,z2)间的欧⽒距离:(3)两个n维向量a(x11,x12,…,x1n)与 b(x21,x22,…,x2n)间的欧⽒距离: 也可以⽤表⽰成向量运算的形式:(4)Matlab计算欧⽒距离Matlab计算距离主要使⽤pdist函数。
若X是⼀个M×N的矩阵,则pdist(X)将X矩阵M⾏的每⼀⾏作为⼀个N维向量,然后计算这M个向量两两间的距离。
例⼦:计算向量(0,0)、(1,0)、(0,2)两两间的欧式距离X = [0 0 ; 1 0 ; 0 2]D = pdist(X,'euclidean')结果:D =1.00002.0000 2.23612. 曼哈顿距离(Manhattan Distance)从名字就可以猜出这种距离的计算⽅法了。
想象你在曼哈顿要从⼀个⼗字路⼝开车到另外⼀个⼗字路⼝,驾驶距离是两点间的直线距离吗?显然不是,除⾮你能穿越⼤楼。
两点距离术语
两点距离术语1. 引言距离是一个基本的概念,它在数学、物理学和计算机科学等领域都有广泛的应用。
在这些领域中,我们经常需要计算两个点之间的距离。
为了方便描述和计算,人们提出了一些距离术语和概念。
本文将介绍一些常见的两点距离术语,包括欧氏距离、曼哈顿距离、切比雪夫距离和闵可夫斯基距离等。
2. 欧氏距离欧氏距离是最常见的距离度量方法之一,它是在笛卡尔坐标系中计算两点之间的直线距离。
欧氏距离的定义如下:其中,和分别表示两个点的坐标,表示坐标的维度。
欧氏距离的计算方法很简单,只需要按照上述公式计算即可。
它的优点是直观易懂,而且在很多应用中都能得到良好的效果。
但是,欧氏距离对异常值比较敏感,可能会导致计算结果的偏差。
3. 曼哈顿距离曼哈顿距离是另一种常见的距离度量方法,它是在笛卡尔坐标系中计算两点之间的曼哈顿距离(也称为城市街区距离)。
曼哈顿距离的定义如下:曼哈顿距离的计算方法与欧氏距离类似,只是将平方项改为绝对值。
曼哈顿距离的优点是能够准确地计算两点之间的路径长度,不受路径形状的影响。
它常用于城市规划、交通网络等领域的路径规划问题。
4. 切比雪夫距离切比雪夫距离是一种更加一般化的距离度量方法,它可以用于任意维度的空间。
切比雪夫距离的定义如下:切比雪夫距离的计算方法是取两点坐标差值的绝对值的最大值。
它的优点是能够准确地计算两点之间的最大差距,常用于图像处理、模式识别等领域。
5. 闵可夫斯基距离闵可夫斯基距离是欧氏距离和切比雪夫距离的一种推广,它可以根据参数的不同取值,得到不同的距离度量方法。
闵可夫斯基距离的定义如下:当参数为1时,闵可夫斯基距离等于曼哈顿距离;当参数为2时,闵可夫斯基距离等于欧氏距离;当参数趋近于无穷大时,闵可夫斯基距离等于切比雪夫距离。
6. 总结本文介绍了几种常见的两点距离术语,包括欧氏距离、曼哈顿距离、切比雪夫距离和闵可夫斯基距离。
这些距离度量方法在数学、物理学和计算机科学等领域都有广泛的应用。
接触网常用计算公式

接触网常用计算公式接触网常用计算公式1. 平均温度t p 和链形悬挂无弛度温度t o 的计算① 2t t tp min max += ② 5-2t t t min max o +=弹 ③ 10-2t t t min max o +=简 式中 t p —平均温度℃(即吊弦、定位处于无偏移状态的温度);t o 弹、t o 简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max —设计最高温度℃;t min —设计最低度℃;2. 当量跨距计算公式∑∑===n i In i I LLLD 113 式中L D —锚段当量跨距(m );).........(3323113n n i I L L L L+++=∑=—锚段中各跨距立方之和; ).........(211n n i I L L L L+++=∑=—锚段中各跨距之和;3. 定位肩架高度B 的计算公式2)101 +(hd h Ie H B ++≈ 式中 B —肩架高度(mm );H —定位点处接触线高度(mm );e —支持器有效高度(mm );I —定位器有效长度(包括绝缘子)(mm );d —定位点处轨距(mm );h —定位点外轨超高(mm );4. 接触线拉出值a 地的计算公式h dH a a -=地 式中 a 地—拉出值标准时,导线垂直投影与线路中心线的距离(mm )。
a 地为正时导线的垂直投影应在线路的超高侧,a 地为负时导线的垂直投影应在线路的低轨侧。
H —定位点接触线的高度(mm );a —导线设计拉出值(mm );h —外轨超高(mm );d —轨距(mm );5. 接触线定位拉出值变化量m ax a ∆的计算公式2max 2max E I I a z z --=∆式中 Δa max —定位点拉出值的最大变化量(mm );Z L —定位装置(受温度影响)偏转的有效长度(mm );max E —极限温度时定位器的最大偏移值(mm );由上式可知 E=0时 Δa=06. 定位器无偏移时拉出值a 15的确定:(取平均温度t p =15℃)max 2115a a a ∆±= 式中 a —导线设计拉出值(mm );Δa max —定位点拉出值的最大变化量(mm );15a —定位器无偏移时(即平均温度时)的拉出值(mm )。
接触网常用计算公式

接触网常用计算公式接触网常用计算公式1. 平均温度t p 和链形悬挂无弛度温度t o 的计算① 2t t tp min max += ② 5-2t t t min max o +=弹 ③ 10-2t t t min max o +=简 式中 t p —平均温度℃(即吊弦、定位处于无偏移状态的温度);t o 弹、t o 简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max —设计最高温度℃;t min —设计最低度℃;2. 当量跨距计算公式 ∑∑===n i In i I LLLD 113 式中L D —锚段当量跨距(m );).........(3323113n n i I L L L L+++=∑=—锚段中各跨距立方之和; ).........(211n n i I L L L L+++=∑=—锚段中各跨距之和;3. 定位肩架高度B 的计算公式2)101 +(hd h Ie H B ++≈ 式中 B —肩架高度(mm );H —定位点处接触线高度(mm );e —支持器有效高度(mm );I —定位器有效长度(包括绝缘子)(mm );d —定位点处轨距(mm );即:270≤15a <300。
曲线区段由于Δa max 较小,15a ≈a 。
即在调整时按a 值进行。
±—由定位的型式决定,直线反定位器取“+”号,其余定位型式取“-”号。
7. 定位器坡度X1的确定: 511101≤∆+≤Ld hc X 任意温度时的坡度;Ld —定位器的长度;Δhc —定位点在极限温度和调整温度时高度变化Δh 之差,即调极h h hc ∆∆=∆-;8. 吊弦间距的计算公式①1420-⨯-=K L X 简单 ②15820-⋅⨯-=K L X 弹性 式中 X 0简单—简单链形悬挂吊弦间距(m );X 0弹性—弹性链形悬挂吊弦间距(m );L —跨距长度(m );K —跨中吊弦布置的根数;9. 吊弦、定位、限制管偏移值计算公式)(p x a t t L E -=式中 E —偏移值(m );L —所计算的吊弦、定位器、限制管距中心锚结或硬锚的距离(m );a —线胀系数1/℃(全补偿吊弦偏移值E 计算时:c j a a a -=,a j 表示接触线线胀系数,C a 表示承力索线胀系数);X t —检调时温度(℃);P t —平均温度(℃);10. 半补偿链形悬挂中心锚结线夹处导线高度Hzx 的确定300+±∆+=f h H H ZX式中ZX H —在任意温度时,中心锚结线夹处导线高度(mm );0H —导线设计高度Δh —第一吊弦点(即定位点)高度变化量F —中心锚结辅助绳固定处接触线弛度“±”—取决于调整时的温度,当调整温度大于无弛度温度时取“-”号,反之取“+” ;11. 补偿器a 、b 值的计算公式① )(min min t t nLa a a x -+=② )(max min x t t nLa b b -+=式中 a —补偿绳回头末端至定滑轮或制动部件的距离(m );b — 补偿器坠砣底面距基础(或地)面最高点的距离(m );n —传动比,传动比为1:2时,n=2;传动比为1:3时,n=3;min a —a 的最小允许值,应为0.2m ;m in b —b 的最小允许值,应为0.2m ;L —补偿器距中心锚结(或硬锚)的距离(m ):m ax t —设计最高温度(℃);min t —设计最低温度(℃);x t —检调时温度(℃);a —线胀系数1/℃;12. 下锚拉线长度计算公式C T N U H --⨯+=5002L β钢绞线式中 钢绞线L —拉线(钢绞线)下料长度(mm );ß—计算系数,它的值由拉线与地面的夹角a 确定:当∠a=450时,ß=1.414;当∠a=600时,ß=1.155;H —支柱出土点至承锚、线锚角钢的距离(mm );T U —表示U T 楔形线夹(或调整螺栓)的长度(mm ); G N —拉线拉杆长度(mm ); 13. 曲线水平力RC P 和RJ P 的计算公式① 承力索:R L T P CRC = ② 接触线:RL T P C RC = 式中 RC P —承力索在曲线上产生的水平力(N );RJ P —接触线在曲线上产生的水平力(N );C T —承力索张力(N );J T —接触线张力(N );R —曲线半径(m );L —跨距长度(m ),若支柱两侧的跨距L 不等时,则2)(21L L L +=即取支柱两侧跨距的平均值;14.直线定位之字力之p 的计算公式L a T p j 4=之 式中 P 之—直线定位之字力(N );T j —接触线张力(N );a —定位点拉出值(m );L —跨距长度(m ),若支柱两侧的跨距L 不等时,则2)(21L L L +=即取支柱两侧跨距的平均值;15. 承力索弛度的测量计算公式B C A F -+=2)( 式中 F —承力索弛度(mm );A 和C —两悬挂点承力索至轨面的高度(mm );B —跨中承力索最低点至轨面的高度(mm );16. 空气绝缘间隙的计算公式 1501.0e U d += 式中 d —空气绝缘间隙(m );e U —接触网额定电压(kv );17. 吊弦长度计算公式 C T x L gx h C 2)(--= 或 20)(4Lx L XF h C --= 式中 C —所求吊弦长度(m );L —跨距长度(m );h —悬挂点结构高度(m );x —所求吊弦距支柱定位点的距离(m );g —每米接触悬挂的重量(kg );C T —承力索的张力(kg );0F —接触线无弛度时承力索的弛度(m );18. 横向承力索分段长度的计算 22n h n a c b +=式中 n b 承力索分段长度(m );h c —相邻两直吊弦的高度差(m );n a —横向承力索上相邻两悬挂间的水平距离(m );如1a 、2a 、3a …n a 。
接触网常用计算公式
接触网常用计算公式接触网常用计算公式1. 平均温度t p 和链形悬挂无弛度温度t o 的计算① 2t t tp min max += ② 5-2t t t min max o +=弹 ③ 10-2t t t min max o +=简 式中 t p —平均温度℃(即吊弦、定位处于无偏移状态的温度);t o 弹、t o 简—分别表示弹性链形悬挂和简单链形悬挂的无弛度温度℃;t max —设计最高温度℃;t min —设计最低度℃;2. 当量跨距计算公式∑∑===n i In i I LLLD 113 式中L D —锚段当量跨距(m );).........(3323113n n i I L L L L+++=∑=—锚段中各跨距立方之和; ).........(211n n i I L L L L+++=∑=—锚段中各跨距之和;3. 定位肩架高度B 的计算公式2)101 +(hd h Ie H B ++≈ 式中 B —肩架高度(mm );H —定位点处接触线高度(mm );e —支持器有效高度(mm );I —定位器有效长度(包括绝缘子)(mm );d —定位点处轨距(mm );h —定位点外轨超高(mm );4. 接触线拉出值a 地的计算公式h dH a a -=地 式中 a 地—拉出值标准时,导线垂直投影与线路中心线的距离(mm )。
a 地为正时导线的垂直投影应在线路的超高侧,a 地为负时导线的垂直投影应在线路的低轨侧。
H —定位点接触线的高度(mm );a —导线设计拉出值(mm );h —外轨超高(mm );d —轨距(mm );5. 接触线定位拉出值变化量m ax a ∆的计算公式2max 2max E I I a z z --=∆式中 Δa max —定位点拉出值的最大变化量(mm );Z L —定位装置(受温度影响)偏转的有效长度(mm );max E —极限温度时定位器的最大偏移值(mm );由上式可知 E=0时 Δa=06. 定位器无偏移时拉出值a 15的确定:(取平均温度t p =15℃)max 2115a a a ∆±= 式中 a —导线设计拉出值(mm );Δa max —定位点拉出值的最大变化量(mm );15a —定位器无偏移时(即平均温度时)的拉出值(mm )。
octile 距离公式

octile 距离公式【实用版】目录1.引言:介绍 Octile 距离公式2.Octile 距离公式的定义与原理3.Octile 距离公式的计算方法4.Octile 距离公式的应用示例5.结论:总结 Octile 距离公式的特点与优势正文【引言】Octile 距离公式是一种计算点集中心点坐标的数学公式,该公式广泛应用于地理信息系统、图像处理以及数据分析等领域。
本文将详细介绍Octile 距离公式的定义、原理、计算方法以及应用示例。
【Octile 距离公式的定义与原理】Octile 距离公式,又称为 Octile 中心点公式,是指通过计算点集中每个点与中心点之间的距离,然后将这些距离进行平方和,再除以点数减一来计算中心点坐标的公式。
该公式之所以被称为 Octile,是因为它最早应用于八叉树(Octree)结构的数据存储和查询中。
【Octile 距离公式的计算方法】Octile 距离公式的计算方法分为以下几个步骤:1.计算每个点与中心点之间的距离;2.将这些距离进行平方;3.求出所有平方和的平均值;4.最后,将平均值开平方,得到中心点的坐标。
【Octile 距离公式的应用示例】假设有一个由 5 个点组成的点集,其坐标分别为(1,1)、(2,2)、(3,3)、(4,4)、(5,5),现在需要求出这个点集的中心点坐标。
根据 Octile 距离公式,我们可以按照以下步骤进行计算:1.计算每个点与中心点之间的距离:- 点 (1,1) 与中心点的距离:sqrt((1-x)^2 + (1-y)^2)- 点 (2,2) 与中心点的距离:sqrt((2-x)^2 + (2-y)^2)- 点 (3,3) 与中心点的距离:sqrt((3-x)^2 + (3-y)^2)- 点 (4,4) 与中心点的距离:sqrt((4-x)^2 + (4-y)^2)- 点 (5,5) 与中心点的距离:sqrt((5-x)^2 + (5-y)^2)2.将这些距离进行平方:- (1-x)^2 + (1-y)^2- (2-x)^2 + (2-y)^2- (3-x)^2 + (3-y)^2- (4-x)^2 + (4-y)^2- (5-x)^2 + (5-y)^23.求出所有平方和的平均值:- ((1-x)^2 + (1-y)^2 + (2-x)^2 + (2-y)^2 + (3-x)^2 + (3-y)^2 + (4-x)^2 + (4-y)^2 + (5-x)^2 + (5-y)^2) / 54.最后,将平均值开平方,得到中心点的坐标:- sqrt(平均值)通过以上计算,我们可以得到这个点集的中心点坐标。