二维梁的固有频率和振型
固支梁各阶固有频率及振型测量

固支梁各阶固有频率及振型测量
一、实验目的:
1. 熟悉梁的固有频率测量原理及振型形状;
2. 用共振法确定固支梁的各阶固有频率和振型。
二、实验仪器设备及安装示意图:
1. 计算机
2. YE6230T3动态数据采集系统
3. 功率函数发生器
4. 机械振动实验台
5. 加速度传感器激光位移传感器电涡流传感器自选
6. 激振器
三、实验过程:
四、实验结果及分析:
1、前三阶固有频率测量结果
2、各测点实测振幅(单位:)1,175;
3、各测点振幅换算值
4、绘出固支梁前三阶振型图一阶振型图
二阶振型图三阶振型图
多自由度系统各阶固有频率及主振型的测量一、实验目的
二、实验设备及安装示意图
三、实验结果与分析
1、不同张力下各阶固有频率的理论计算值与实测值
2、绘出观察到的三自由度系统振型曲线。
3、将理论计算出的各阶固有频率、理论振型与实测固有频率、实测振型相比较,是否一致? 产生误差的原因在哪里?。
梁的振动实验报告

《机械振动学》实验报告实验名称梁的振动实验专业航空宇航推进理论与工程姓名刘超学号 SJ1602006南京航空航天大学Nanjing University of Aeronautics and Astronautics2017年01月06日1实验目的改变梁的边界条件,对比分析不同边界条件,梁的振动特性(频率、振型等)。
对比理论计算结果与实际测量结果。
正确理解边界条件对振动特性的影响。
2实验内容对悬臂梁、简支梁进行振动特性对比,利用锤击法测量系统模态及阻尼比等。
3实验原理3.1 固有频率的测定悬臂梁作为连续体的固有振动,其固有频率为:()1,2,.......r r l r ωλ==其中, 其一、二、三、四阶时, 1.87514.69417.854810.9955.....r l λ=、、、 简支梁的固有频率为:()1,2,.......r r l r ωλ==其中 其一、二、三、四阶时, 4.73007.853210.995614.1372.....r l λ=、、、其中E 为材料的弹性模量,I 为梁截面的最小惯性矩,ρ为材料密度,A 为梁截面积,l 为梁的长度。
试件梁的结构尺寸:长L=610mm, 宽b=49mm, 厚度h=8.84mm. 材料参数: 45#钢,弹性模量E =210 (GPa), 密度ρ=7800 (Kg/m 3)横截面积:A =4.33*10-4 (m 2),截面惯性矩:J =312bh =2.82*10-9(m 4)则梁的各阶固有频率即可计算出。
3.2、实验简图图1 悬臂梁实验简图图2简支梁实验简图实验仪器本次实验主要采用力锤、加速度传感器、YE6251数据采集仪、计算机等。
图3和图4分别为悬臂梁和简支梁的实验装置图。
图5为YE6251数据采集仪。
图3 悬臂梁实验装置图图4 简支梁实验简图图5 YE6251数据采集分析系统实验步骤1:"在教学装置选择"中,选择结构类型为"悬臂梁",如果选择等份数为17,将需要测量17个测点。
简支梁固有频率与固有振型的实验室测量与理论分析

Ab ta t i l b a wh c i h r s —e t n a d c n iu u tu t r s u u l s d a n a ay i to f h i rt n p e s r c :S mp e e m ih w t t e c o s s ci n o t o ssr cu e,i s al u e sa n l ss o l e vb ai h - h o n y ot o n me o .D n mi a a y i o i l e m t h p l a in o e r t a n lssa d e p r n a si g meh d ,c n g t au o nn y a c n l ss fsmp eb a wi te a p i t f h o e i l ay i n x e me t l e t t o s a e t — h c o t c a i t n n rl r q e c v b ain a l u ea d c t a d mp n fte c n iu u t cu e o a ay et en t rl r q e c v b ain,a l a e u n y, i r t mpi d n r i l a i g o o t o ss u tr .T n z h au a e u n y, i rt f o t i c h n r l f o mpi — t d n rt a a i gc n a od s mp t ei ir t n whc e d e f r e t a g ot e f me o k tc n a s e c ei — u e a d c i ld mp n a v i y ah t vb ai , ih l a st t ut s ma e t a w r .I a lor a h t i c c o oh h d h r h n t nin t v i i rt n tr wi h a u a e u n y a d ih r n ir t n o e smp e b a wi r s -e t n,w i h ofr d a e t o a od v b ai .Sa t t te n t r f q e c n n ee t b ai ft i l e m t co ss ci o o h l r v o h h o h c f e e u eu t o o s r o rr s a c i r t n o o l ae r me o k s flme h d t tt u e e r h o v b ai f mp i td f a f o c c a w r. Ke r s:smpe b a w t r s —e t n i r t n au a  ̄e u n y;i h r n i r t n mo e;d mp n a i y wo d i l e m i co s s ci ;v b ai ;n t r l q e c h o o n e e t b ai d v o a ig rt o
10二自由度系统的各阶固有频率与主振型

实验10 二自由度系统的各阶固有频率与主振型一、实验目的1.学会用共振法确定二自由度系统的各阶固有频率。
2.观察二自由度系统的各阶振型。
3.将实验测得的各阶固有频率和振型与理论结果进行比较。
二、实验装置与仪器1.机械振动与控制实验台。
2.磁电式非接触激振器(JZF-1型)。
3.激振信号源(SJF-3型)。
4.重锤两个(1kg 与2kg 各一个),磁性表座,两质量块的钢丝绳一根,螺丝刀。
图4-12-1 二自由度横向振动系统的装置简图三、实验原理二自由度系统的装置示意如图4-12-1所示,两个质量块、m 的质量均为m (集中质量),钢丝绳的张力可以通过改变重锤的重量来调节,从而构成一个弦上有集中质量的横向振动系统,不计钢丝绳的质量,便将无限自由度系统简化为二自由度系统的模型,具有两个固有频率。
在激振力作用下,系统发生振动,该振动是两个主振型的叠加。
当激振频率等于某一阶固有频率时,系统的振动形态就是该阶固有频率的主振型,而另一阶振型的影响可以忽略不计。
A mB 在测定系统的固有频率时,需要连续调节激振频率,使系统出现某阶振型且振幅值达到最大,这时的激振频率就是该阶的固有频率。
由振动理论,两个集中质量的运动系统可由以下方程描述:0=+KX XM &&其中质量矩阵为:mm 00=M 刚度矩阵为:21123/6/3/3/6−−=−−=L T L T L T L T L T K 位移矩阵为:21x x X =系统的一阶固有频率为:mLT 31=ω 或者 mL T f 3π211= 系统的二阶固有频率为:mLT 92=ω 或者 mL T f 9π212= 在以上各式中, =0.0045kg 为集中质量, m T 为弦丝张力(N ), =L 0.625m 为弦丝长度。
各阶主振型分别为()111++=A 以及()112−+=A ,参见图4-12-2。
(a ) (b )图4-12-2 二自由度系统的一阶主振型(a )和二阶主振型(b )四、实验方法1.将磁电式非接触激振器接入激振信号源输出端,把激振器对准其中任一个质量块,保持一定的间隙(8—10mm ),使得振动时激振器与质量块不会发生碰撞。
两端悬挂梁各阶固有频率和主振形的测定试验
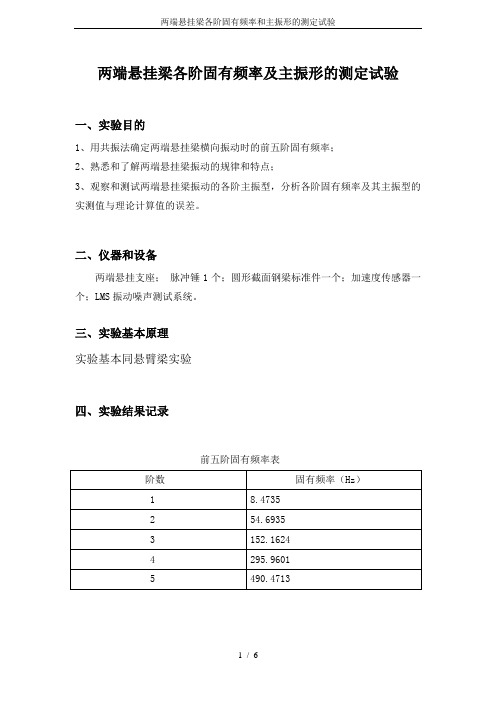
两端悬挂梁各阶固有频率及主振形的测定试验一、实验目的1、用共振法确定两端悬挂梁横向振动时的前五阶固有频率;2、熟悉和了解两端悬挂梁振动的规律和特点;3、观察和测试两端悬挂梁振动的各阶主振型,分析各阶固有频率及其主振型的实测值与理论计算值的误差。
二、仪器和设备两端悬挂支座;脉冲锤1个;圆形截面钢梁标准件一个;加速度传感器一个;LMS振动噪声测试系统。
三、实验基本原理实验基本同悬臂梁实验四、实验结果记录前五阶固有频率表阶数固有频率(Hz)1 8.47352 54.69353 152.16244 295.96015 490.4713实验测得前5阶振型图如下:1阶振型图2阶振型图3阶振型图4阶振型图5阶振型图五、ANSYS有限元模拟仿真结果5.1前五阶固有频率仿真数据5.2前五阶振型仿真图1阶振型仿真图2阶振型仿真图3阶振型仿真图4阶振型仿真图5阶振型仿真图六、结果误差分析悬臂梁理论计算固有频率理论值、有限元仿真值与实测值表 梁几何尺寸 梁长 L=1m梁直径D=12mm 固有频率(Hz ) 1f2f 3f4f5f实验值 8.4735 54.6935 152.1624 295.9601 490.4713 有限元仿真值 053.884148.43290.69479.87结论:由以上表可以看梁一阶频率的实验值和仿真值完全不同,并且仿真值为0,其余四阶的数值比较接近,推测出现此结果的原因是:(1)有限元仿真中梁为无约束梁,其六个自由度均未约束,因此会出现前六个仿真值均接近0的情况,即悬挂梁不存在一阶振型。
(2)由于悬挂梁的六个自由度都未约束,实际震动中会将能量分散到整个空间,因此难以测得悬挂梁的一阶固有频率。
机械振动学中的固有频率与振型分析
机械振动学中的固有频率与振型分析机械振动学是研究机械系统在受到外界激励作用下产生振动现象的一门学科。
在机械系统中,固有频率与振型分析是非常重要的内容,可以用来描述系统的动态特性和振动行为。
本文将介绍机械振动学中固有频率与振型分析的基本概念和应用。
一、固有频率固有频率是指机械系统在没有外界激励下自由振动的频率。
对于一个简单的振动系统,其固有频率可以通过运动方程的解析解求得。
固有频率是系统的固有特性之一,可以用来描述系统的动态响应特性和结构的刚度、质量、阻尼等参数。
在实际工程应用中,固有频率的计算对于系统结构设计和振动控制至关重要。
通过对系统的固有频率进行分析,可以避免共振现象的发生,减小系统动态响应,提高系统的稳定性和可靠性。
二、振型分析振型分析是指对机械系统的振动模式和振动幅值进行分析和描述。
振型是指系统在特定频率下的振动模式,可以通过振动实验和有限元分析等方法得到。
振型分析可以提供系统的模态形式和振动幅值信息,有助于分析系统的受力情况和结构设计。
振型分析在工程实践中具有广泛的应用,可以用于评估系统的结构健康状况、辅助设计优化和振动控制。
通过对系统的振型进行分析,可以找到系统的薄弱环节和潜在问题,及时进行改进和优化,提高系统的性能和可靠性。
三、结语固有频率与振型分析是机械振动学中重要的内容,对于机械系统的设计和性能评估具有重要意义。
通过对系统的固有频率和振型进行分析,可以优化系统的结构设计,降低系统的动态响应,提高系统的稳定性和可靠性。
希望本文的介绍能够帮助读者更好地理解机械振动学中固有频率与振型分析的相关知识。
07-固有频率与振型
Theory of Vibration with Applications
多自由度系统
固有频率 主振型
A(1)
. 10000 = 10000 . . 10000
,
A( 2 )
. 10000 = 0.2808 −0.6404
Theory of Vibration with Applications
返回首页
多自由度系统
固有频率 主振型
(2k − ω 2 m)(k − 2ω 2 m) − k 2 adj B = k (k − 2ω 2 m) k2 (2k − ω 2 m)(k − 2ω 2 m) k ( 2k − ω 2 m) k ( 2k − ω 2 m) ( 2k − ω 2 m) 2 − k 2 k2 k (k − 2ω 2 m)
LL
(i ) 令 An = 1 ,于是可得第i阶主振型矢量为
A(i ) = A1(i )
(
A2(i )
L 1
)
T
在主振型矢量中,规定某个元素的值为1,并进而确定其 它元素的过程称为归一化。
Theory of Vibration with Applications
返回首页
多自由度系统
固有频率 主振型 主振型矢量也可以利用特征矩阵的伴随矩阵来求得。 特征矩阵 B K − ω 2M 用矩阵A的第i=行第j 列的代数余子 逆矩阵 B −1 = 1 adj B B 式把第j 行第i 列的元素替换掉得到 代入 就是A的伴随矩阵,记作adjA。 adj B 乘以 BI =B ωi 任 BB 何 (i ) B i I = Bi adj Bi Bi =0 非 A 零 Bi adj Bi = 0 列 adj Bi 比较 成 (K − ωi2 M ) A (i ) = 0 比 例 所以伴随矩阵的每一列就是主振型矢量或者差一常数因子。
连续弹性体悬臂梁各阶固有频率及主振型测定(最全)word资料
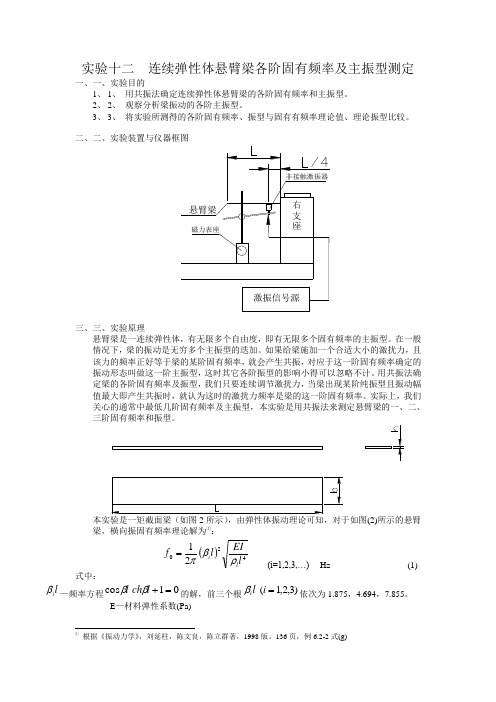
实验十二 连续弹性体悬臂梁各阶固有频率及主振型测定一、一、实验目的1、 1、 用共振法确定连续弹性体悬臂梁的各阶固有频率和主振型。
2、 2、 观察分析梁振动的各阶主振型。
情况下,梁的振动是无穷多个主振型的迭加。
如果给梁施加一个合适大小的激扰力,且该力的频率正好等于梁的某阶固有频率,就会产生共振,对应于这一阶固有频率确定的振动形态叫做这一阶主振型,这时其它各阶振型的影响小得可以忽略不计。
用共振法确定梁的各阶固有频率及振型,我们只要连续调节激扰力,当梁出现某阶纯振型且振动幅值最大即产生共振时,就认为这时的激扰力频率是梁的这一阶固有频率。
实际上,我们关心的通常中最低几阶固有频率及主振型,本实验是用共振法来测定悬臂梁的一、二、l i β①根据《振动力学》,刘延柱,陈文良,陈立群著,1998版。
136页,例6.2-2式(g)A — A — 梁横截面积(m 2)l ρ—材料线密度(kg/m) l ρ=ρAρ—材料密度(kg/m 3) I —梁截面弯曲惯性矩(m 4)对矩形截面,弯曲惯性矩:123bhI = (m 4) (2)式中: b —梁横截面宽度(m) h —梁横截面高度(m) 本实验取l =( ) m b=( ) m h=( ) mE=20×1011Pa ρ=7800kg/m 3 各阶固有频率之比:f 1:f 2:f 3:f 4……=1:6.27:17.55 (3)理论计算可得悬臂梁的一、二、三阶固有频率的振型如图(3)所示:0.10.20.30.40.50.60.70.80.91-10120 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2020 0.10.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10.511.5beam transvers vibration with one end clasped四、四、实验方法1、 1、 选距固定端L/4之处为激振点,将激振器端面对准悬臂梁上的激振点,保持初始间隙δ=6~8mm 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、综合实验题目和要求
题目:求一二维梁的固有振型和频率。
要求:用有限元理论,求一二维梁的固有振型和频率:
(1) 用二维梁有限元对梁进行分析数值计算求出其主振型向量和频率; (2) 求出其理论精确解,精确主振型向量和频率; (3) 将理论结果和计算结果进行比较。
二、程序流程图
三、实验结果
1.前六阶振型
同一有限元数不同阶数比较(以有限元20为例)如下图所示:
00.10.20.30.40.50.60.70.80.9
一阶
-0.8
-0.6-0.4-0.200.20.40.60.81
二阶
-0.8
-0.6-0.4-0.200.20.40.60.81
三阶
-0.8
-0.6-0.4-0.200.20.40.60.8
四阶
-0.8
-0.6-0.4-0.200.20.40.60.81
五阶
-0.8
-0.6-0.4-0.200.20.40.60.81
六阶 四、实验分析
对于二维梁有限元的划分(以下只对二维梁而言),要根据需求精度进行合理划分,既兼顾精度,同时也兼顾计算量(随着计算精度的提高,单元数量增加,相应计算量也会增加,计算时间也会增加),经过试验随着单元数量增加,其计算精度也不段提高,当将梁分到七单元时,通过计算得到的主振型和频率和理论值吻合的非常好。
当梁取一单元时(elementno=1),由于梁总体只有两自由度,故只能得出前两阶主振型;当梁取二单元时(elementno=2),由于梁总体有四自由度,故只能得出前四阶主振型;对于梁取三单元(elementno=3)以及三单元以上(elementno>3)时,梁总体有六自由度以及更高自由度,这里只画出前六阶主振型图。
下六图是在elementno=20的情况下,通过计算,画出前六阶的主振型图(其中红线部分为理论主振型图,绿色五角星是计算在梁各单元节点处的振型,数量取决于梁单元划分的数目)。
五、源程序清单
clear all
close all
%各参数的设置
rou=2.7e3; %密度
A=1e-3;%横截面积
E=72e9; %弹性模量
L=1; %梁长
I=8.3333e-009;%截面惯性矩
elementno=input('输入有限元的数量:'); %有限元的数量
rodno=elementno+1;%节点数
alldimension=rodno*2;
l=L/elementno;
%单元刚度矩阵
ke=E*I/l^3*[12 -6*l -12 -6*l;
-6*l 4*l^2 6*l 2*l^2;
-12 6*l 12 6*l;
-6*l 2*l^2 6*l 4*l^2];
%单元质量矩阵
me=rou*A*l/420*[156 -22*l 54 13*l; -22*l 4*l^2 -13*l -3*l^2;
54 -13*l 156 22*l;
13*l -3*l^2 22*l 4*l^2];
K=zeros(alldimension,alldimension); M=zeros(alldimension,alldimension);
for i=1:elementno %总刚度矩阵和总质量矩阵
K(2*i-1,2*i-1)=ke(1,1)+K(2*i-1,2*i-1); K(2*i-1,2*i)=ke(1,2)+K(2*i-1,2*i);
K(2*i-1,2*i+1)=ke(1,3)+K(2*i-1,2*i+1) ;
K(2*i-1,2*i+2)=ke(1,4)+K(2*i-1,2*i+2) ;
K(2*i,2*i-1)=ke(2,1)+K(2*i,2*i-1);
K(2*i,2*i)=ke(2,2)+K(2*i,2*i);
K(2*i,2*i+1)=ke(2,3)+K(2*i,2*i+1);
K(2*i,2*i+2)=ke(2,4)+K(2*i,2*i+2);
K(2*i+1,2*i-1)=ke(3,1)+K(2*i+1,2*i-1) ;
K(2*i+1,2*i)=ke(3,2)+K(2*i+1,2*i);
K(2*i+1,2*i+1)=ke(3,3)+K(2*i+1,2*i+1 );
K(2*i+1,2*i+2)=ke(3,4)+K(2*i+1,2*i+2 );
K(2*i+2,2*i-1)=ke(4,1)+K(2*i+2,2*i-1) ;
K(2*i+2,2*i)=ke(4,2)+K(2*i+2,2*i);
K(2*i+2,2*i+1)=ke(4,3)+K(2*i+2,2*i+1 );
K(2*i+2,2*i+2)=ke(4,4)+K(2*i+2,2*i+2 ); M(2*i-1,2*i-1)=me(1,1)+M(2*i-1,2*i-1) ;
M(2*i-1,2*i)=me(1,2)+M(2*i-1,2*i);
M(2*i-1,2*i+1)=me(1,3)+M(2*i-1,2*i+ 1);
M(2*i-1,2*i+2)=me(1,4)+M(2*i-1,2*i+ 2);
M(2*i,2*i-1)=me(2,1)+M(2*i,2*i-1);
M(2*i,2*i)=me(2,2)+M(2*i,2*i);
M(2*i,2*i+1)=me(2,3)+M(2*i,2*i+1); M(2*i,2*i+2)=me(2,4)+M(2*i,2*i+2); M(2*i+1,2*i-1)=me(3,1)+M(2*i+1,2*i-1);
M(2*i+1,2*i)=me(3,2)+M(2*i+1,2*i); M(2*i+1,2*i+1)=me(3,3)+M(2*i+1,2*i+ 1);
M(2*i+1,2*i+2)=me(3,4)+M(2*i+1,2*i+ 2);
M(2*i+2,2*i-1)=me(4,1)+M(2*i+2,2*i-1);
M(2*i+2,2*i)=me(4,2)+M(2*i+2,2*i);
M(2*i+2,2*i+1)=me(4,3)+M(2*i+2,2*i+ 1);
M(2*i+2,2*i+2)=me(4,4)+M(2*i+2,2*i+
2);
end
Kcantalever=K(3:alldimension,3:alldime nsion);
Mcantalever=M(3:alldimension,3:alldim ension);
[V,D]=eig(Kcantalever,Mcantalever);
lanbuda=diag(D);%特征值
omega=sqrt(diag(D))
vstandard=zeros(elementno,elementno); %数值计算主振型的生成
for i=1:(alldimension-2)
Vstandard(:,i)=V(:,i)/V((alldimension-3) ,i);
for j=1:elementno
vstandard(j,i)=Vstandard(2*j-1,i);
%提取有纵向位移有关的向量元素形成新向量
end
end
lanbudar=[1.875 4.694 7.855
10.996 14.137 17.279]'
omegaexact=lanbudar.^2*sqrt(E*I/rou/ A)
x=0:0.01:1; xrod=linspace(1/elementno,1,elementno );
y1=zeros(101,6);
a=(sinh(lanbudar)-sin(lanbudar))./(cosh( lanbudar)+cos(lanbudar));
if (elementno<=3)
p=2*elementno;
else p=6;
end
for i=1:p
y1(:,i)=cosh(lanbudar(i)*x')-cos(lanbuda r(i)*x')-a(i).*(sinh(lanbudar(i)*x')-sin(l a nbudar(i)*x')); %理论主振型函数ystandardexact= y1(:,i)/ y1(101,i); %理论主振型归一化
figure(i)
plot(x,ystandardexact,'r') %理论主振型函数的绘制
hold on
plot(xrod,vstandard(:,i),'g*')
grid on
end
六、对本实验课的几点建议
首先,通过几周的MATLAB课程的学习,让我掌握了其基本的操作和命令,以及其Simulink仿真模块,对以后的学习增加了一个实用的数学工具。
其次,在完成作业的过程中进一步让我熟悉了该软件的应用,最关键的是应用到专业相关的题目求解中,对于车辆动态仿真的领域将于相关软件(如ADMAS)结合进行联合仿真,让我受益匪浅。
最后,在上课的过程中,由于机器较少,希望能增加一些机器,希望老师能提供一些除幻灯片外的其他关于MATLAB的学习资料。
总之,感谢游霞老师的悉心指导。