雷达电磁波三维探测范围可视化仿真
雷达探测威力范围与三维可视化研究
0 引 言
维地 理信 息平 台中 ,用 户 可 交换 改变 雷 达 工 作 参 数 和
高效 而尽 可能 准确 的雷达效 能仿 真对 于辅 助雷 达 传 播环 境参 数查看 不 同情 况下 雷 达 的探 测 覆 盖 范 围 , 阵地 部署 、电子 战模 拟仿 真 和 电子 战 模 拟训 练 系 统 具 为指挥人员提供辅助决策提供依据。
的影 响是不 可 忽 略 的。 文 献 [2]按 照 先 进 传 播 模 型 (APM)以及 大气 吸 收 衰减 计 算 模 型 计 算 平 面 内 的 雷 达波传 播 衰减值 ,由此传播 衰 减得 到平 面 内的雷 达 作 用范 围 ,再 按 照虚拟 3D策 略 将 划 分 的多 个 剖 面 连 接 起 来形 成 三维 的雷达 作 用 范 围 ,但 该 模 型对 于 大 尺 度 范围的评估 APM 计算传播损耗 的效率是瓶颈。本文 引入 了广 泛传播 模 型 (WRPM),综合 考虑 了地 形 、气 象 等环境 因素的传播衰减 ,依据雷达方程和典型雷达波 束方向图函数 ,,梁桃红
(1.中国电波传播研究所 , 山东 青岛 266107; 2.空军司令部 信息化部, 北京 100843)
摘 要 :对雷达方程 中的传播因子进行研究 ,传播 因子涵盖 了 自然环境 中对传播产生影 响的所 有因素 ,其影响包括 空气 和水 的能量 吸收 、绕射 、折射 、多径 干扰 、地表介质 、地形 干扰和其他许 多 自然 环境 因素。文 中对 传播 因子 进行 了建模 ,并基 于 典 型雷达辐射波束对雷达探测范 围进行仿真 ,实现了雷达探测范 围直 观 的三维可视 化展现 ,有 助于决策人 员直 观地掌握 雷达探测能力 ,为装备 的“战试训 ”提供决 策支持。 关键词 :传播 因子 ;广 泛传播模 型 ;雷达探测范 围;三维 可视化
测绘技术中的三维可视化与模拟技术

测绘技术中的三维可视化与模拟技术近年来,随着科技的迅猛发展,测绘技术中的三维可视化和模拟技术逐渐成为热门话题。
它们为我们提供了更加直观、沉浸式的空间认知和模拟体验,应用领域广泛且前景可观。
一、三维可视化技术的应用1. 城市规划与设计三维可视化技术在城市规划与设计中发挥着重要作用。
通过将地理信息系统(GIS)与三维建模技术相结合,可以实现对城市空间的高精度建模和可视化展示。
城市规划者可以通过在虚拟场景中进行模拟和分析,来优化城市的布局和设计,提高城市规划的科学性和可行性。
2. 地理信息系统与导航随着智能手机的普及和地理定位技术的发展,三维可视化技术在地理信息系统和导航系统中得到广泛应用。
用户可以通过虚拟地图和导航软件,实时查看街道、建筑物等空间信息,准确导航到目的地。
三维模拟技术也使得导航更加生动,用户可以在虚拟场景中进行预览,更好地规划行程。
3. 地质勘探与环境保护在地质勘探和资源开发中,三维可视化技术可以帮助研究人员更好地理解地下结构和储量,提高勘探效率和准确性。
同时,三维模拟技术也有助于环境保护,可以通过模拟场景,评估不同方案对环境的影响,及时调整工作计划,保护自然资源。
二、三维模拟技术的发展与挑战1. 模拟算法的创新实现逼真的三维模拟需要强大的计算能力和先进的算法支持。
目前,计算机图形学、计算机视觉等领域的研究者正在不断创新和优化模拟算法,提高模拟的真实感和效果。
例如,光线追踪算法和体积渲染算法能够更好地模拟光照和材质的效果,增强模拟的真实感。
2. 数据获取与处理三维模拟需要大量的空间数据支持,包括地形数据、建筑物数据、植被数据等。
数据的获取和处理成为三维模拟技术发展的一大挑战。
我们需要利用遥感技术、激光测距技术等手段采集高精度的数据,并通过数据融合和处理方法,将多源数据整合到一个统一的模型中。
三、三维可视化与模拟技术的未来展望1. 虚拟现实与增强现实的融合虚拟现实(VR)和增强现实(AR)技术是当前热门的技术趋势,它们与三维模拟技术具有天然的联系。
雷达模拟器中可视化仿真技术的实现
达数据处理算法 的工作效果 。要 实现这 样的雷 达仿真模拟
l 引言
雷达模拟器可完整地仿真雷达的各项性 能 , 既方便研究
人员操作 , 又能 比较逼 真 的给 出雷 达 的模拟 数据 和 跟踪航
器系统需要模拟雷达工作过程 、 目标 运动状态和环境实 时状 态并对真实量测数据与雷 达数据 处理算 法的工作效 果进行
实时 、 直观 的动态 显示 。因此需 要实 现的功 能包括 : 对想 ①
迹, 达到实时仿 真雷 达 的主要功 能和 工作过程 , 以及 对 目标 的探测性能 , 为雷达 系统设计提供仿真 雷达情报和为雷达数 据处理算法研究人员提供仿真数 据支持和评估环境 , 因此其 主要作用是充 当雷达 系统设计 和雷达 数据处 理算法 调试和 验证 的试验平台 , 缩短 了研制周期 , 节约 了费用 。近年 来 , 由
仿真和雷达波位扫描等功能 , 能直观、 准确 、 动态地表现雷达战场环境。仿真实验表 明, 雷达模拟 器实现 了目标运动和雷达 数据处理算法 的工作效果 , 为设计新型雷达提供可靠参考。 关键词 : 仿真模拟 ; 雷达模拟器 ; 地理信息
中图 分 类号 :3 19 T 9 . 文 献标 识 码 : A
第2 第 期 7 卷 4
文章编号 : 2 1 )4 0 2 0 0
计 算
机
仿
真
21年4 0 0 月
雷 达 模 拟 器 中 可 视 化 仿 真 技 术 的 实 现
陈丽平 , 杨 峰, 梁 彦
( 西北工业大学 自动化学院 , 陕西 西安 70 7 ) 10 2
p o r mmi g tc n q e i it g ae b an t es e i cf n t n u h a o n ain,d s ly a d c n r l f at — rga n e h i s n e t d t o ti p cf u ci ss c sf u d t u r o h i o o ip a n o t t e oob l
基于APM的雷达探测范围三维可视化
,“ } { ) ( }
( 1 )
挥有 重要意义 。以往 研究 的重点在 雷达垂直面 … 或水 平面
的探测范 围,随着计算机技术 的发展 ,雷 达三维探测范围 已
其 中, () z为大气在 不同高度 上的折射 系数 ;k 是 自由空间
传播 因子 F与 电场 uxz 的关系为 : (,)
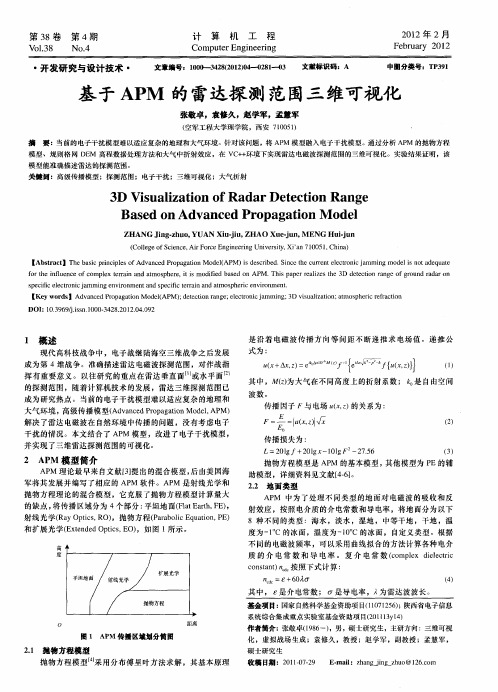
的缺点 , 传播 区域分为 4个部分 : 将 平坦地面(lt at, E , FaE r F ) h 射线光学( a pisR ) R yO t , O ,抛物 方 ̄(aa oi E ut n P ) c P rb l q ai , E c o 和扩展光学(xed dO t sE ,如图 1 E tn e pi , O) c 所示。
Ba e n Ad a c d Pr pa a i n M o e s d0 v n e o g t d l o
Z NGJn -h o YU uj , HAo X ejn M E G i u HA igz u , ANXi-u Z i u - , N Hu- n u j
第3 8卷 第 4期
V0 - 8 l3
N o4 .
计
算
机
工
程
21 0 2年 2月
Fe r a y 201 bur 2
Co p t rEn i e rng m ue gn ei
・ 开发研究与设计技术 ・
文章 : o _ 4 ( l0 21 文 标 码: 编号 1 3 8 o ) 0 22 2 4 8 3 — 献 识 A
模型、规则格 网 D M 高程数据处理 :法 和大气中折射效应 ,在 V + 环境 下实现 雷达 电磁波探测范围 的三维可视化 。实验结果证 明,该 E 疗 c+
复杂电磁环境三维仿真及可视化系统
复杂电磁环境三维仿真及可视化系统张霖;沈月伟;吴迎年;穆兰;王海波;吕彦东【摘要】随着系统仿真技术的快速发展,复杂电磁环境(CEME)已然引起人们的广泛关注,CEME仿真对于雷达预警、体系对抗、移动通信、GPS定位等都有重要作用.首先对于二维抛物方程(2DPE)的推导过程及离散过程进行介绍,并对2D电磁传播的衰减过程进行了仿真.其次,基于2DPE法,研究了并行度高的准三维抛物方程(quasi-3 DPE)仿真方法.最后,通过仿真案例,验证了准三维法仿真的三维效果和并行效率,总结比较了3DPE和quasi-3 DPE法的计算效率和精度,并借助商业电磁仿真软件Wireless Insie验证了quasi-3 DPE法的传播损耗仿真精度.【期刊名称】《中国电子科学研究院学报》【年(卷),期】2013(008)002【总页数】8页(P111-118)【关键词】电磁环境;抛物方程;准三维方法;并行计算【作者】张霖;沈月伟;吴迎年;穆兰;王海波;吕彦东【作者单位】北京航空航天大学电气信息与自动化学院,北京100191【正文语种】中文【中图分类】TP391.99;O4110 引言近几十年来,随着无线通信和现代战争技术的发展,预测无线信号的传播范围、雷达的探测覆盖区域等变得越来越重要。
准确的电磁特性数据是复杂电磁环境(EME,electromagnetic environment)预测过程中不可或缺的组成部分,而EME仿真作为一种简单、灵活、高效的技术,已成为获取电磁特性数据的最常用的方法之一。
EME仿真过程中需要考虑的因素包括电磁干扰,电磁脉冲,电磁辐射对人员、军械和挥发性材料危害,以及雷电和沉积静电等自然现象的综合[1]。
复杂EME(CEME)是一种动态多变的复杂巨系统,尤其是在几十、几百公里这样大区域内,电磁传播将受到复杂地形地貌、复杂气象条件、各种形状材质建筑物、动态移动目标等各种因素的影响,仿真的快速性和准确性受到了严峻的挑战。
基于MT方法的雷达电磁波面可视化实现
线方 向图函数和科学计算可视化领域中绘 制等值 面的方法 , D r t90 环境下实现雷 达电磁波面在三维空 间的效果显 在 ic .c eX
r s l s o h t h f c frd r s s r c est e r d ra tn a p t r u cin e u t h w t a e ef t a' io u f e me t h a a ne n at n f n t .T r u h o t zn ,s c s t e o a s a e o h o g p i i g u h a mi
中 图分 类 号 :P 1 T39 文 献 标 识 码 : B
Ac o pls m e t o s a i i da ’ e t o a ne i c m ih n f Viu l ng Ra r S El c r m g tc z
W a e Ba e n M T e h d v sdo M to
p unng,t e s e e i m o t no g o e c i g a d ta nng r i h c n ss o h e u h frta h n n r i i .Thee e to a a ' s s ra ec n b o nl p— f c ft r d rsio u f e a e n to ya he
Gr p i s a h c .Ra a n e n atr u cin a d t emeh d whc p l d i h r a o iu l ai n i ce t c e m・ d r tn ap t n f n t n t o ih a p i n t ea e fvs ai t s in i o a e o h e z o n i f
基于MT方法的雷达波束可视化实现

Ac o l h n f s aii gRa a a Ba e n M T M e d c mp i me t u l n d r s o Vi z Be m s d o mO
L U h n . iWANG a .o g L U a g I Z o gy, Xio1n , I Oin
现代战场上 ,电磁波是信息获取的重要 媒介 和最 佳载体 。战场可视化技术正是在这样 的背景 下得 到了 迅速发展。其中 ,战场电磁空间可视化是战场可视化 的重要研究 内容之一。由于 电磁环境 具有抽象性 、无 形性和动态性等特征 ,不能被人的感 官直接感受 ,只 有依靠专门的接收或探测设备才能查 明电磁信号 的分 布及 参数特 征 ,认识 它比认识直观可感 的地理环境难 度要大 ,模 拟它也 比模拟直观可感 的环境难度更大 ,
( 海军潜艇学院 ,山东 青 岛 267 ) 60 1
摘
要 :复杂电磁环境可视 化是 目前 军事仿真领域的难点和热点。以雷达 天线 方向图函数为基础 ,通过科 学计算
可视化领域 中绘制等值面的Mac igT t h da方法 ,绘制 出雷达波束在 三维空间的形 态及其动 态扫描 效果,并 rhn e a erl r 在Mal 环境下验 证 了绘制 出的雷达波束形 态的正确性 。对生成 雷达波束的计算过程进 行 了优化处理 ,使之 能够 tb a
例如立方体8个顶点的场强值均大于第3期指挥控制与仿真794结束语采用mt方法实现雷达天线波束效果的优点在于该方法能拟合各种不规则曲面因此可拟合其它类型雷达波束在三维空间中的分布形态同时通过曲面过面测试细分临界计算等方法有效的减少程序对计算机时空资源的依赖
第3 卷 2
第3 期
指挥 控制 与仿 真
雷达探测距离仿真实验

远距离支援/自卫干扰下雷达探测距离仿真一、实验目的1.定量分析干扰机掩护突防目标或自卫干扰的有效距离。
2.根据抗干扰措施,了解不同抗干扰策略条件下雷达探测探测目标的能力。
3.利用MATLAB可视化雷达的探测能力,更好地理解雷达威力图。
二、实验原理雷达能在多远的距离检测到目标,即雷达的探测能力,由雷达方程确定。
雷达方程将雷达的作用距离和雷达发射、接收、天线和环境等因素联系在一起,决定了雷达检测某类目标的最大作用距离。
2.1无干扰条件下的雷达方程雷达检测能力实质上取决于信号噪声比,设检测信号所需的最小输出信噪比为(SN)omin,并考虑系统总损耗L,则可得无干扰条件下的雷达最大作用距离方程为:R max=[P tσG t G rλ2(4π)3kT0B n FL(S N)omin]14上式中,P t为雷达发射机功率,G t为雷达天线的发射增益,G r为雷达天线的接收增益,λ为波长,σ为目标雷达截面积,B n为雷达接收机带宽,F为雷达接收机噪声系数,T0为噪声温度,k为玻尔兹曼常数。
2.2支援干扰条件下的雷达方程支援干扰条件下,干扰机以其主瓣指向雷达,而雷达则以主瓣指向目标。
只考虑单部干扰机时,雷达作用距离方程为:R max_SJ=[P t G t G rσR j2B j4πP j G j G r′(θ)B n Lγj (SJ)min]14上式中,P j为干扰机发射功率,G j为雷达天线的发射增益,B j为干扰机噪声带宽,G r′(θ)为雷达天线对干扰机干扰信号的接收增益。
γj为干扰信号对雷达天线的极化损失,R j为干扰机到雷达之间的距离。
(SJ)min为最小可检测信干比。
考虑多部干扰机支援干扰时,设干扰机到雷达之间的距离和方位角不同,而其他性能一致,则雷达作用距离方程为:R max_SJ=[P t G t G rσB j4πP j G j B n Lγj(SJ)min∑G r′(θi)R j,i2ni=1]14本实验中,计算干扰下的雷达作用距离时,除干扰机的干扰信号外,考虑其他噪声杂波的影响,则信干比的计算为:(SJ all )=SP N∙P NJ all=SP N∙P NP N+P0j上式中,P N=FkT0B为噪声杂波功率,P0j为雷达接收到的干扰信号功率。
如何利用测绘技术进行地下空间三维模拟与可视化

如何利用测绘技术进行地下空间三维模拟与可视化地下空间是指地球表面以下的空间,它包括各种地下结构,如地下管网、地下洞穴、地下车库等。
利用测绘技术进行地下空间的三维模拟与可视化,可以为城市规划、建筑设计、地质勘探等领域提供重要的参考和决策支持。
本文将探讨如何应用测绘技术进行地下空间的三维模拟与可视化。
地下空间的三维模拟与可视化可以通过测绘技术中的遥感、地理信息系统(GIS)和激光雷达等手段来实现。
首先,遥感技术可以通过卫星或无人机获取地下空间的遥感影像,如红外遥感影像、高分辨率遥感影像等。
这些遥感影像可以提供地下空间的各种信息,如地下管网的位置、洞穴的大小和形状等。
然后,通过GIS技术,可以将遥感影像与其他地理信息进行集成,形成一幅完整的地下空间三维模型。
最后,利用激光雷达技术对地下空间进行精确测量,获取地下空间的准确形状和尺寸数据。
在地下空间的三维模拟与可视化中,建立准确的地下管网模型是非常重要的。
地下管网是城市基础设施的重要组成部分,对于城市的正常运转和发展至关重要。
利用测绘技术可以实现对地下管网的快速建模和动态监测。
通过遥感影像和激光雷达技术,可以获取地下管道的位置、管径和材质等信息,并将其融合到三维模型中。
同时,通过GIS技术可以实现对地下管网的实时监测和管理,及时发现和解决管道的故障和泄漏等问题,提高城市基础设施的运行效率和安全性。
此外,地下空间的三维模拟与可视化还可以应用于地质勘探和矿产资源开发等领域。
通过激光雷达技术可以获取地下空间的物理属性和构造特征,如岩层的厚度、断层的位置和走向等。
这些信息对于地质勘探和矿产资源开发具有重要的指导作用。
通过三维模拟和可视化技术,可以直观地展示地下地质结构的复杂性和变化规律,为地质工程师和矿业开发者提供科学依据和决策支持。
除了在科学研究和工程实践中的应用,地下空间的三维模拟与可视化还可以广泛应用于城市规划和建筑设计中。
通过测绘技术可以获取地下空间的各种信息,如地下设施的位置和形状、地下水位和地下土壤的物理性质等。
激光雷达三维点云可视化模型 原理

激光雷达三维点云可视化模型原理激光雷达扫描物体时,会得到大量散点数据。
When the laser radar scans an object, it will obtain a large amount of scattered data.这些散点数据可以被整合成三维点云模型。
These scattered data can be integrated into a three-dimensional point cloud model.三维点云模型可以反映出物体的立体形状和表面特征。
The three-dimensional point cloud model can reflect the three-dimensional shape and surface features of the object.激光雷达通过扫描不同角度的物体来获取更多的散点数据。
The laser radar obtains more scattered data by scanning the object from different angles.然后,这些散点数据被转换为点云形式,并进行处理。
Then, these scattered data are converted into point cloud form and processed.通过处理,可以得到更加清晰和真实的三维点云模型。
Through processing, a clearer and more realistic three-dimensional point cloud model can be obtained.在三维点云模型中,每个点都包含了空间坐标和反射强度信息。
In the three-dimensional point cloud model, each point contains spatial coordinates and reflection intensity information.借助计算机图形学技术,可以对三维点云模型进行可视化展示。
多机载预警雷达协同探测范围三维建模与可视化
多机载预警雷达协同探测范围三维建模与可视化
付莹;汤子跃;孙永健
【期刊名称】《电光与控制》
【年(卷),期】2014(000)002
【摘要】单架机载预警雷达探测性能会受到空域覆盖盲区和多普勒盲区的限制。
在分析空域覆盖盲区和多普勒盲区的基础上,建立了机载预警雷达探测范围的三维模型。
仿真结果表明,可视化三维模型使机载预警雷达对监视区域内各高度层目标的空域覆盖更加直观,而且可以给出雷达动态威力范围。
多机载预警雷达进行协同探测,不仅可以改善对监视区域的空域覆盖,还可以互相弥补多普勒盲区。
【总页数】6页(P22-27)
【作者】付莹;汤子跃;孙永健
【作者单位】空军预警学院,武汉 430019; 中国人民解放军95333部队,长沙410114;空军预警学院,武汉 430019;空军预警学院,武汉 430019; 北京无线电测量研究所,北京 100854
【正文语种】中文
【中图分类】V271.4;TN951
【相关文献】
1.机载预警雷达与电子侦察协同工作对作战效能的影响研究 [J], 马健;彭芳;吴岚
2.动态多干扰下雷达探测范围三维建模与可视化 [J], 张政; 顾海亮; 马良
3.机载预警雷达网络化协同探测模式及性能分析 [J], 陈小龙; 张海; 孙嘉辰; 黄勇
4.机载预警雷达网络化协同探测模式及性能分析 [J], 陈小龙;张海;孙嘉辰;黄勇
5.机载预警雷达协同探测航线模式研究 [J], 刘波;陈春晖;沈齐
因版权原因,仅展示原文概要,查看原文内容请购买。
基于APM的雷达探测范围三维可视化

基于APM的雷达探测范围三维可视化张敬卓;袁修久;赵学军;孟慧军【摘要】The basic principles of Advanced Propagation Model(APM) is described. Since the current electronic jamming model is not adequate for the influence of complex terrain and atmosphere, it is modified based on APM. This paper realizes the 3D detection range of ground radar on specific electronic jamming environment and specific terrain and atmospheric environment.%当前的电子干扰模型难以适应复杂的地理和大气环境.针对该问题,将APM模型融入电子干扰模型.通过分析APM的抛物方程模型、规则格网DEM高程数据处理方法和大气中折射效应,在VC++环境下实现雷达电磁波探测范围的三维可视化.实验结果证明,该模型能准确描述雷达的探测范围.【期刊名称】《计算机工程》【年(卷),期】2012(038)004【总页数】3页(P281-283)【关键词】高级传播模型;探测范围;电子干扰;三维可视化;大气折射【作者】张敬卓;袁修久;赵学军;孟慧军【作者单位】空军工程大学理学院,西安710051;空军工程大学理学院,西安710051;空军工程大学理学院,西安710051;空军工程大学理学院,西安710051【正文语种】中文【中图分类】TP3911 概述现代高科技战争中,电子战继陆海空三维战争之后发展成为第4维战争。
准确描述雷达电磁波探测范围,对作战指挥有重要意义。
以往研究的重点在雷达垂直面[1]或水平面[2]的探测范围,随着计算机技术的发展,雷达三维探测范围已成为研究热点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在实际的战场环境中,电磁环境非常复杂,除了地形地质、实时变化大气环境,雷达探测范围还与目标散射截面积有关。构建真正可以提供辅助决策功能的虚拟战场平台,还需进行大量的研究与探索,将电磁环境和地理环境充分融合。
图5是对圆柱体数据提取等值面的效果,实现了雷达探测范围的可视化。但是从中也能明显看出从圆柱体数据直接提取等值面的缺陷,圆柱体数据场数据密度不一致,内密外疏,。这样会造成2个问题,一是在探测范围的外边界数据不光滑,误差较大,为了减小误差,需要更多的剖分面,体数据量急剧增加,增大计算负荷;二是探测范围内部数据场密度过大,数据冗余,计算出的等值面片比计算机像素还要小,面片退化为点,浪费计算资源。2.2 同心圆柱环拼接 为了圆柱体数据场密度不一致问题,提出了一种同心圆柱环拼接算法。首先将圆柱体数据沿距离方向等分为圆柱环,然后从内向外依次填充数据,使得外环的数据密度不小于内环的数据密度,最后将各圆柱体环数据可视化拼接,即可实现对探测范围的可视化。本算法的关键是利用APM模型的递推算法,将初始场外推,减少递推步数,。利用已经算出a点和b点的电场值,插值计算出中点c的电场值,把c的电场值作为初始值带入APM模型求解后面的数据。这样就避免了上面提出的2个问题。若a与b之间的地形变化剧烈,这种方法也可能带来较大的误差。这时,应以雷达原点为初始场,计算雷达至c点的电场强度。在工程中,充分考虑雷达周围的地形情况可避免大量的重复运算,如若雷达至a,b和c点的地形一样,或误差很小,那么可以使用任意一点的电场值代替其他点的电场值。
3 结果与分析 设发射频率为1 GHz,天线高度为25 m,采用水平极化方式,地面绝对湿度为0.1 g/m3,地表空气温度为15℃,地面类型为中等干燥地面。利用VTK软件包和同心圆柱环拼接方法,雷达探测范围仿真的结果。若加入电子干扰,设雷达的半功率波束宽度为30℃,探测范围仿真结果。比较图8、图9和图5,利用同心圆柱拼接算法,探测边界光滑性得到明显的改善。绘制完毕后,用鼠标旋转可以改变视角,速率可满足实时性要求。
设干扰机主瓣方向与雷达主瓣方向的夹角为θ,等效的传播损失经验公式为: 式中:θ3dB为半功率波束宽度。2 三维可视化方法2.1 圆柱等值面提取 利用VTK软件包实现数据场的可视化,VTK使用的是Pipeline应用程序结构,封装成一系列定义清晰,易于扩展的类,具体流程。为获取整个体数据场,可由APM模型分别计算以雷达为原点的各个方位角垂直面上的传播损失,然后将各个垂直剖面联合起来,形成圆柱坐标形式的体数据,。提取圆柱体数据场在特定阈值时的等值面即可形成雷达探测范围。为了简化,假设各方位角垂直面上的地形和大气状况相同。言 虚拟战场生成是目前研究的一个热点,其利用虚拟现实技术构建沉浸式的战场环境,为指挥员提供强大的辅助决策功能。虚拟战场包括自然环境和电磁环境2个部分,将非可视化的电磁环境可视化是构建虚拟战场难点之一。雷达电磁波是电磁环境的主要构成,其在传播过程中受到复杂自然环境的影响,同时也受到复杂电子干扰环境的影响,电磁波能量在空间的分布极为复杂。目前由美国海军发展的高级传播模型(Advanced Propagation Model,APM)综合考虑了复杂地形和复杂大气环境的影响,能够快速准确地估计出雷达电磁波传播损失情况。但是APM模型未考虑受到电子干扰时的情形,且局限于二维垂直面上的传播计算。 实际运用中,必须对APM模型进行改进。文献利用APM模型实现了雷达传播信息的圆柱体绘制。圆柱体绘制视觉效果好,但每次改变视角都重新计算全部数据,因此对硬件要求较高。文献提出虚拟3D策略来构造三维雷达的作用范围。虚拟3D策略绘制速度快,实时性好,但随着电磁波传播距离的增大,数据误差难以控制。改进了APM模型,使得APM模型更适用于电子干扰环境;改进了可视化方法,有效控制电磁传播距离较远时的数据误差。视觉化工具函数库(Visualization Toolkit,VTK)是一个开源、跨平台软件包。它是在三维函数库OpenGL的基础上采用面向对象的设计方法发展起来的,具有强大的三维图形功能。充分挖掘其强大的数据集对象功能,实现了对大范围高密度的电磁环境实时可视化。1 雷达垂直探测范圈1.1 雷达探测垂直面数据获取 高级传播模型(APM)是射线光学和抛物方程理论的混合模型,它克服了抛物方程模型计算量大的缺点,将传输区域分为4个部分:平坦地面FE(FlatEarth)、射线光学RO(Ray Optics)、抛物方程PE(Parabolic Equation)和扩展光学XO(Extended Optics),。APM模型已经考虑了地形、地面类型、大气折射、大气衰减等诸多自然环境因素,只需根据各地自然环境的不同进行建模,模型在精确度和计算效率方面实现了很好的权衡,是一种全新的、高效的电磁波传播模型。基于此,选用APM模型来计算各个方位角垂直面上的传播因子F和传播损失L。更多关于APM的资料见文献。传播因子F的定义为空间某点的实际电场强度E与在自由空间传播条件下天线方向图最大方向对准该点时产生的场强E0之比。传播损失L是传播因子F的函数。
PE模型是APM的核心模型,其他为补充。PE采用分布傅里叶方法求解,其基本原理是沿着电磁波传播方向等间距不断递推求电场值。递推公式为: 式中:x,z分别表示距离和高度方向上的坐标值;M(z)为大气在不同高度上的折射系数;k0是自由空间波数;f和f-1表示傅里叶和逆傅里叶变换;p是转换常数,p=k0sinθ;θ是电磁波传播方向与水平面的夹角。 1.2 受到干扰时雷达探测垂直面数据修正1.2.1 从传播损失到探测范围 以功率形式表示的最基本的雷达方程为: 式中:Pt,Pr分别为雷达发射和接收功率;Gt,Gr分别为雷达发射和接收增益;λ为波长;σ为雷达目标截面积;R为传播距离;Ls为系统损失;L为传播损失。从式(4)可以看出,当发射功率和雷达目标反射截面积一定时,雷达接收功率和传播损失有确定的关系。当雷达接收功率大于雷达最小可检测功率Simin时,即可探测到目标。雷达最小可检测功率Simin是雷达系统在一定发现概率下的固有性能。于是,可以通过传播损失值直接确定雷达的探测范围,把Simin作为阈值,L≤Simin的区域为探测区域,L>Simin的区域为盲区。1.2.2 考虑电子干扰时对APM模型的改进 由APM模型可得到雷达电磁波二维垂直面上的传播损失,。APM模型未考虑电子干扰的情况。实际上,由于电磁波传播的独立性,电子干扰并不影响雷达传播损失,电子干扰是一种通过强干扰信号进入雷达接收机,从而降低雷达信噪比,达到降低雷达的威力和精度,使其不能正常工作的一种干扰方式。若把电子干扰降低的雷达信噪比等效到雷达传播损失值上,就可以极大地简化计算过程。