静态多路径分配模型程序源代码(C++程序)
第10章目标程序运行时的存储组织

p3活动记录 存取链(静态链) 控制链(动态链)
p3活动记录 存取链(静态链) 控制链(动态链)
main活动记录
2、用Display表
Display表---嵌套层次显示表 当前激活过程的层次为K,它的Display表含有K+1个
单元,依次存放着现行层,直接外层…直至最外层的每 一过程的最新活动记录的基地址。 说明:1、由于过程的层数可以静态确定,因此每个过程 的Display表的体积在编译时即可以确定。
Q的 活动记录
P的 活动记录 主程序的 活动记录
DISPLAY表பைடு நூலகம்维护和建立
为便于组织存储区,将display作为活动记录的一 部分,其相对地址在编译时是完全可以确定的。
假设过程P1可调用P2,为了能在P2中建立P2的 display,在P1调用P2时设法把P1的display地址 作为连接数据之一(全局display地址)传送给P2, 因此连接数据包括: 老SP值(动态链) 返回地址 全局display地址
嵌套过程的栈式分配方案
分程序结构的存储分配方案
3、过程活动:一个过程的活动指的是该过程的一次执行。
4、活动记录:一个过程的一次执行所需要的信息使用一个连 续的存储区来管理,这个区(块)叫做一个活动记录。
活动记录一般包含:
(1)连接数据
返回地址—调用过程指令的下一条指令的地址。
动态链(控制链)—指向调用该过程活动记录地址的指针。用 于当调用返回时,将当前栈顶正确切换到调用者的活动记录
2、某过程p是在层次为i的过程q内定义的,并且q是 包围p的直接外层,那么p的过程层数为i+1。
例: program main(i,0);
mpc控制c代码源码csdn
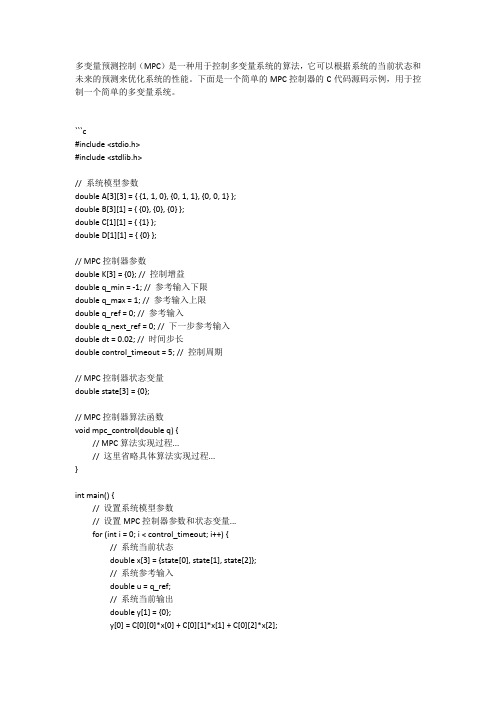
多变量预测控制(MPC)是一种用于控制多变量系统的算法,它可以根据系统的当前状态和未来的预测来优化系统的性能。
下面是一个简单的MPC控制器的C代码源码示例,用于控制一个简单的多变量系统。
```c#include <stdio.h>#include <stdlib.h>// 系统模型参数double A[3][3] = { {1, 1, 0}, {0, 1, 1}, {0, 0, 1} };double B[3][1] = { {0}, {0}, {0} };double C[1][1] = { {1} };double D[1][1] = { {0} };// MPC控制器参数double K[3] = {0}; // 控制增益double q_min = -1; // 参考输入下限double q_max = 1; // 参考输入上限double q_ref = 0; // 参考输入double q_next_ref = 0; // 下一步参考输入double dt = 0.02; // 时间步长double control_timeout = 5; // 控制周期// MPC控制器状态变量double state[3] = {0};// MPC控制器算法函数void mpc_control(double q) {// MPC算法实现过程...// 这里省略具体算法实现过程...}int main() {// 设置系统模型参数// 设置MPC控制器参数和状态变量...for (int i = 0; i < control_timeout; i++) {// 系统当前状态double x[3] = {state[0], state[1], state[2]};// 系统参考输入double u = q_ref;// 系统当前输出double y[1] = {0};y[0] = C[0][0]*x[0] + C[0][1]*x[1] + C[0][2]*x[2];// 根据当前状态和参考输入计算MPC控制器的下一步参考输入和目标值...q_next_ref = mpc_control(q); // 控制器的输出是一个新的参考输入q_next_ref和目标值T(x, u)(通过系统模型转换为输入和状态约束的等式)// 根据目标值和约束条件更新参考输入和状态变量...q_ref = q_next_ref; // 更新当前参考输入为下一步参考输入q_next_refstate[0] += A[0][0]*dt + K[0]; // 根据状态方程更新状态变量x[0]state[1] += A[1][1]*dt + K[1]; // 根据状态方程更新状态变量x[1]state[2] += A[2][2]*dt + K[2]; // 根据状态方程更新状态变量x[2]}return 0;}```以上代码是一个简单的MPC控制器的C代码源码示例,它可以根据系统的当前状态和未来的预测来优化系统的性能。
鸿鹄论坛_HCNA-Storage (H13-611)题库 v4.0
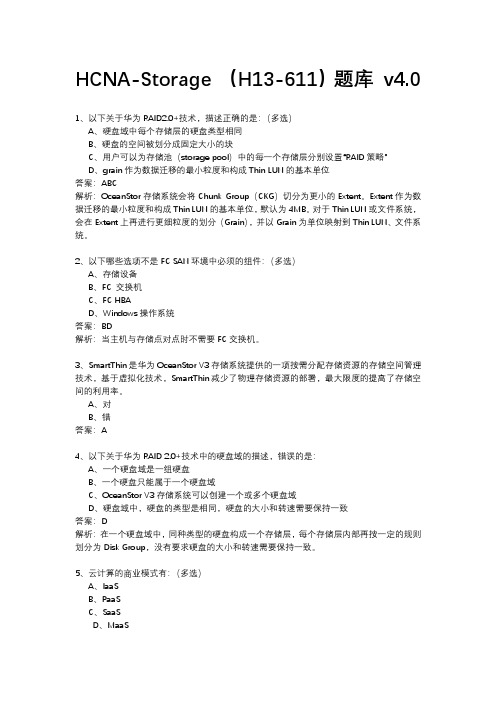
HCNA-Storage (H13-611)题库v4.01、以下关于华为RAID2.0+技术,描述正确的是:(多选)A、硬盘域中每个存储层的硬盘类型相同B、硬盘的空间被划分成固定大小的块C、用户可以为存储池(storage pool)中的每一个存储层分别设置“RAID策略”D、grain作为数据迁移的最小粒度和构成Thin LUN的基本单位答案:ABC解析:OceanStor存储系统会将Chunk Group(CKG)切分为更小的Extent。
Extent作为数据迁移的最小粒度和构成Thin LUN的基本单位,默认为4MB。
对于Thin LUN或文件系统,会在Extent上再进行更细粒度的划分(Grain),并以Grain为单位映射到Thin LUN、文件系统。
2、以下哪些选项不是FC SAN环境中必须的组件:(多选)A、存储设备B、FC 交换机C、FC HBAD、Windows操作系统答案:BD解析:当主机与存储点对点时不需要FC交换机。
3、SmartThin是华为OceanStor V3存储系统提供的一项按需分配存储资源的存储空间管理技术,基于虚拟化技术,SmartThin减少了物理存储资源的部署,最大限度的提高了存储空间的利用率。
A、对B、错答案:A4、以下关于华为RAID 2.0+技术中的硬盘域的描述,错误的是:A、一个硬盘域是一组硬盘B、一个硬盘只能属于一个硬盘域C、OceanStor V3存储系统可以创建一个或多个硬盘域D、硬盘域中,硬盘的类型是相同,硬盘的大小和转速需要保持一致答案:D解析:在一个硬盘域中,同种类型的硬盘构成一个存储层,每个存储层内部再按一定的规则划分为Disk Group,没有要求硬盘的大小和转速需要保持一致。
5、云计算的商业模式有:(多选)A、IaaSB、PaaSC、SaaSD、MaaS答案:ABC6、华为OceanStor V3 SmartTier特性可用于将数据放置到指定的磁盘类型上。
c程序的四个基本操作过程
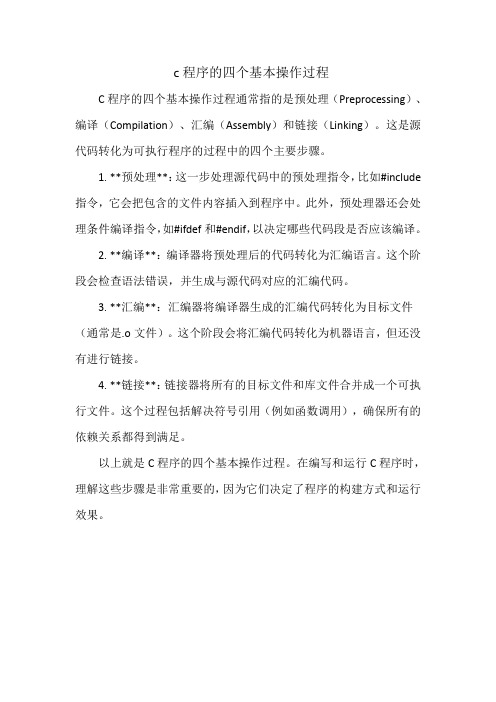
c程序的四个基本操作过程
C程序的四个基本操作过程通常指的是预处理(Preprocessing)、编译(Compilation)、汇编(Assembly)和链接(Linking)。
这是源代码转化为可执行程序的过程中的四个主要步骤。
1. **预处理**:这一步处理源代码中的预处理指令,比如#include 指令,它会把包含的文件内容插入到程序中。
此外,预处理器还会处理条件编译指令,如#ifdef和#endif,以决定哪些代码段是否应该编译。
2. **编译**:编译器将预处理后的代码转化为汇编语言。
这个阶段会检查语法错误,并生成与源代码对应的汇编代码。
3. **汇编**:汇编器将编译器生成的汇编代码转化为目标文件(通常是.o文件)。
这个阶段会将汇编代码转化为机器语言,但还没有进行链接。
4. **链接**:链接器将所有的目标文件和库文件合并成一个可执行文件。
这个过程包括解决符号引用(例如函数调用),确保所有的依赖关系都得到满足。
以上就是C程序的四个基本操作过程。
在编写和运行C程序时,理解这些步骤是非常重要的,因为它们决定了程序的构建方式和运行效果。
C#之内存分配
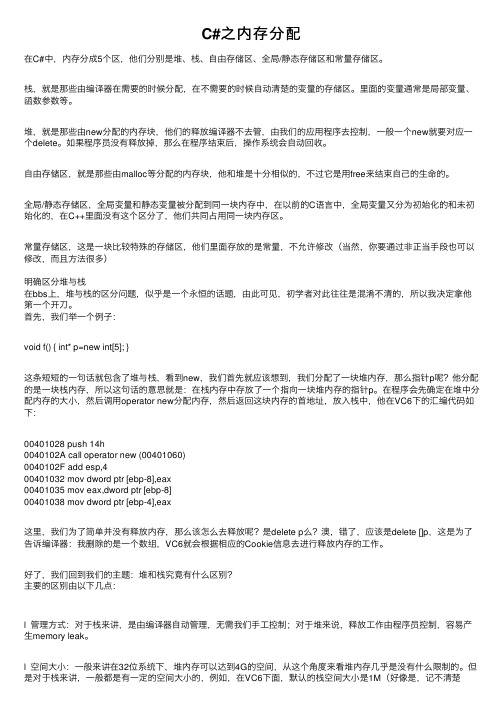
C#之内存分配在C#中,内存分成5个区,他们分别是堆、栈、⾃由存储区、全局/静态存储区和常量存储区。
栈,就是那些由编译器在需要的时候分配,在不需要的时候⾃动清楚的变量的存储区。
⾥⾯的变量通常是局部变量、函数参数等。
堆,就是那些由new分配的内存块,他们的释放编译器不去管,由我们的应⽤程序去控制,⼀般⼀个new就要对应⼀个delete。
如果程序员没有释放掉,那么在程序结束后,操作系统会⾃动回收。
⾃由存储区,就是那些由malloc等分配的内存块,他和堆是⼗分相似的,不过它是⽤free来结束⾃⼰的⽣命的。
全局/静态存储区,全局变量和静态变量被分配到同⼀块内存中,在以前的C语⾔中,全局变量⼜分为初始化的和未初始化的,在C++⾥⾯没有这个区分了,他们共同占⽤同⼀块内存区。
常量存储区,这是⼀块⽐较特殊的存储区,他们⾥⾯存放的是常量,不允许修改(当然,你要通过⾮正当⼿段也可以修改,⽽且⽅法很多)明确区分堆与栈在bbs上,堆与栈的区分问题,似乎是⼀个永恒的话题,由此可见,初学者对此往往是混淆不清的,所以我决定拿他第⼀个开⼑。
⾸先,我们举⼀个例⼦:void f() { int* p=new int[5]; }这条短短的⼀句话就包含了堆与栈,看到new,我们⾸先就应该想到,我们分配了⼀块堆内存,那么指针p呢?他分配的是⼀块栈内存,所以这句话的意思就是:在栈内存中存放了⼀个指向⼀块堆内存的指针p。
在程序会先确定在堆中分配内存的⼤⼩,然后调⽤operator new分配内存,然后返回这块内存的⾸地址,放⼊栈中,他在VC6下的汇编代码如下:00401028 push 14h0040102A call operator new (00401060)0040102F add esp,400401032 mov dword ptr [ebp-8],eax00401035 mov eax,dword ptr [ebp-8]00401038 mov dword ptr [ebp-4],eax这⾥,我们为了简单并没有释放内存,那么该怎么去释放呢?是delete p么?澳,错了,应该是delete []p,这是为了告诉编译器:我删除的是⼀个数组,VC6就会根据相应的Cookie信息去进⾏释放内存的⼯作。
交通工程毕业设计(论文)-河北省干线公路网交通量预测
河北工业大学城市学院毕业论文作者:学号:074563系:交通工程专业:交通工程题目:河北省干线公路网交通量预测指导者:讲师(姓名) (专业技术职务)评阅者:(姓名) (专业技术职务)2011年6月8日毕业论文中文摘要毕业论文外文摘要目录第一章绪论 (1)研究背景 (1)1.2 国内外研究现状及发展趋势 (2)国内外研究现状 (2)1.2.2 发展趋势 (4)交通量预测的目的及意义 (5)1、4技术路线 (6)第二章河北省社会经济现状及交通运输 (7)2.1 河北省地理位置及自然条件 (7)2.2 综合运输现状分析 (8)运输市场现状分析 (10)区域生产总值 (10)2.3.2 户数与资产 (10)2.3.3 运输生产情况 (10)2.4 运输方式结构变化分析 (12)2.5社会经济发展现状 (14)第三章干线公路网交通量预测方法研究 (14)3、1 预测的理论及概述 (14)3.1.1 预测的定义 (14)3.1.2 预测的分类 (15)预测的特点 (17)预测思路 (18)预测过程可按如下程序进行 (19)交通量预测的概述 (19)3.2.1 交通量预测的思路 (19)交通量预测的内容 (21)交通量预测的基本原理 (22)公路交通量的预测方法 (22)3.3.1 时间序列法 (23)3.3.2 回归预测法 (23)四阶段预测法 (23)小结 (36)第四章、河北省干线公路交通量预测 (36)河北省交通量需求预测 (36)河北省交通量分布预测 (41)河北省交通量分配预测 (42)第五章公路交通发展规划 (45)5.1 规划总目标及分阶段目标 (45)5.1.1 2005 年目标 (45)5.1.2 2010 年发展目标 (46)5.1.3 2020 年发展目标 (46)5.2 河北省高速公路规划及近期建设重点 (47)5.2.1 河北省高速公路现状及存在问题 (47)5.2.2 河北省高速公路规划目标 (49)第六章总结及展望 (49)参考文献 (51)致谢 (53)第一章绪论随着我国改革开放和经济的发展,我国小康社会建设的步伐加快,我国经济正处于稳步、快速的发展时期。
c语言生成库文件过程
c语言生成库文件过程C语言是一种高级编程语言,被广泛用于系统级编程和嵌入式系统开发。
为了提高代码的复用性和模块化程度,C语言提供了生成库文件的机制。
本文将详细介绍C语言生成库文件的过程,以及相关的概念和步骤。
一、库文件的概念库文件是一种二进制文件,包含一组函数、变量或者数据结构的实现。
它将一些常用的代码封装成一个独立的单元,供其他程序调用和使用。
库文件可以被静态链接到程序中,也可以被动态链接到程序中。
1. 静态库(Static Library):静态库是将库文件的内容完全复制到程序中,程序在编译时需要将所有被引用的库文件的代码复制到最终生成的可执行文件中。
具体来说,静态库以归档(Archive)的形式存在,包含了一组目标文件(Object File)的集合。
静态库的文件名通常以“.a”(在GNU 编译器中)或“.lib”(在Windows中)结尾。
2. 动态库(Dynamic Library):动态库是在程序运行时被动态加载到内存中的库文件,程序在编译时只需要引用库函数的签名,无需复制库文件中的代码。
不同的程序可以共享同一个动态库的实例,有效减小可执行文件的体积。
动态库的文件名通常以“.so”(在Unix/Linux中)或“.dll”(在Windows中)结尾。
在使用库文件时,程序需要链接器(Linker)的支持,将库文件的代码和程序的代码进行整合,生成最终的可执行文件。
二、生成静态库的过程下面将介绍生成静态库的过程,以GNU编译器为例。
1. 编写源代码首先,需要编写一组实现某些功能的源代码文件。
这些源代码文件可以包含函数的定义、变量的声明和实现,以及相关的头文件。
2. 编译为目标文件使用编译器将源代码文件编译为目标文件(Object File)。
目标文件是二进制文件,包含了源代码文件的机器代码表示和一些符号表信息。
使用gcc 命令可以进行编译,例如:gcc -c file1.c file2.c这将生成`file1.o`和`file2.o`两个目标文件。
c 静态函数多实例调用

c 静态函数多实例调用
静态函数在C语言中是一种特殊的函数,它们在程序的生命周期内只存在一个实例。
因此,静态函数不能被其他程序直接调用,只能在其定义的作用域内被调用。
然而,有时候我们需要在不同的实例中多次调用同一个静态函数。
这种情况下,我们可以使用函数指针来实现。
首先,我们需要定义一个指向静态函数的指针类型。
例如,如果我们有一个名为`myStaticFunction`的静态函数,我们可以定义一个指向该函数的指针类型:
```c
typedef void (*StaticFunctionPtr)(int);
```
然后,我们可以为每个需要使用该静态函数的实例创建一个指向该函数的指针:
```c
StaticFunctionPtr instance1FunctionPtr = &myStaticFunction;
StaticFunctionPtr instance2FunctionPtr = &myStaticFunction;
```
接着,我们可以通过函数指针来在不同的实例中调用静态函数:```c
instance1FunctionPtr(10);
instance2FunctionPtr(20);
```
这样,我们就可以在不同的实例中多次调用同一个静态函数了。
3、C编程的各种源码文件
3、C编程的各种源码⽂件1、C语⾔模块化编程中的头⽂件 实际开发中⼀般是将函数和变量的声明放到头⽂件,再在当前源⽂件中 #include 进来。
如果变量的值是固定的,最好使⽤宏来代替。
.c和.h⽂件都是源⽂件,除了后缀不⼀样便于区分外和管理外,其他的都是相同的,在.c中编写的代码同样也可以写在.h中,包括函数定义、变量定义、预处理等。
但是,.h 和 .c 在项⽬中承担的⾓⾊不⼀样:.c ⽂件主要负责实现,也就是定义函数和变量;.h ⽂件主要负责声明(包括变量声明和函数声明)、宏定义、类型定义等。
这些不是C语法规定的内容,⽽是约定成俗的规范,或者说是长期形成的事实标准。
根据这份规范,头⽂件可以包含如下的内容:可以声明函数,但不可以定义函数。
可以声明变量,但不可以定义变量。
可以定义宏,包括带参的宏和不带参的宏。
结构体的定义、⾃定义数据类型⼀般也放在头⽂件中。
在项⽬开发中,我们可以将⼀组相关的变量和函数定义在⼀个 .c ⽂件中,并⽤⼀个同名的 .h ⽂件(头⽂件)进⾏声明,其他模块如果需要使⽤某个变量或函数,那么引⼊这个头⽂件就可以。
这样做的另外⼀个好处是可以保护版权,我们在发布相关模块之前,可以将它们都编译成⽬标⽂件,或者打包成静态库,只要向⽤户提供头⽂件,⽤户就可以将这些模块链接到⾃⼰的程序中。
2、C语⾔标准库以及标准头⽂件 源⽂件通过编译可以⽣成⽬标⽂件(例如 GCC 下的 .o 和 Visual Studio 下的 .obj),并提供⼀个头⽂件向外暴露接⼝,除了保护版权,还可以将散乱的⽂件打包,便于发布和使⽤。
实际上我们⼀般不直接向⽤户提供⽬标⽂件,⽽是将多个相关的⽬标⽂件打包成⼀个静态链接库(Static Link Library),例如 Linux 下的 .a 和 Windows 下的 .lib。
打包静态库的过程很容易理解,就是将多个⽬标⽂件捆绑在⼀起形成⼀个新的⽂件,然后再加上⼀些索引,⽅便链接器找到,这和压缩⽂件的过程⾮常类似。
c语言实现进程调度算法
c语言实现进程调度算法进程调度算法是操作系统中的一个重要组成部分,用于决定在多道程序环境下,选择哪个进程来占用CPU并执行。
C语言是一种通用的编程语言,可以用于实现各种进程调度算法。
这里我将分别介绍三种常见的进程调度算法:先来先服务调度算法(FCFS)、最短作业优先调度算法(SJF)和轮转法调度算法(RR),并给出用C语言实现的示例代码。
首先,我们来看先来先服务调度算法(FCFS)。
此算法根据到达时间的先后顺序,按照先来后到的顺序进行处理。
下面是基于C语言的先来先服务调度算法实现示例代码:```c#include<stdio.h>struct Process};void FCFS(struct Process proc[], int n)for (int i = 1; i < n; i++)}printf("进程号到达时间服务时间完成时间等待时间周转时间\n");for (int i = 0; i < n; i++)}for (int i = 0; i < n; i++)}int maiint n;printf("请输入进程数:");scanf("%d", &n);struct Process proc[n];for (int i = 0; i < n; i++)printf("请输入进程%d的到达时间和服务时间(用空格分隔):", i + 1);}FCFS(proc, n);return 0;```其次,我们来看最短作业优先调度算法(SJF),该算法选择执行时间最短的进程先执行。
下面是基于C语言的最短作业优先调度算法实现示例代码:```c#include<stdio.h>struct Process};void SJF(struct Process proc[], int n)for (int i = 0; i < n; i++)for (int j = 0; j < i; j++)}shortest_job = i;for (int j = i + 1; j < n; j++)shortest_job = j;}}}for (int i = 1; i < n; i++)}printf("进程号到达时间服务时间完成时间等待时间周转时间\n");for (int i = 0; i < n; i++)}for (int i = 0; i < n; i++)}int maiint n;printf("请输入进程数:");scanf("%d", &n);struct Process proc[n];for (int i = 0; i < n; i++)printf("请输入进程%d的到达时间和服务时间(用空格分隔):", i + 1);}SJF(proc, n);return 0;```最后,我们来看轮转法调度算法(RR),该算法分配一个时间片给每个进程,当时间片用完后,将CPU分配给下一个进程。
交通规划-第八章分配交通量概要
14
二、非平衡分配方法
全有全无分配法(All-or-nothing Assignment Method) 不考虑交通量对路阻的影响,取路阻为常数。 分配思路:把OD交通量全部(all)分配到该OD对的最短 路径上,其余路径不分配任何交通量(nothing) 计算步骤 初始化,求出自由流状态下所有路段的阻抗; 计算各OD之间的最短路径; 将OD交通量全部分配到相应的最短径路上。 其他分配方法的基本子程序 每次改变路段上的交通量后,重新计算路段阻抗和最 短路径,(对一定的OD交通量)反复进行全有全无分配
q1
q2
21
三、平衡分配方法
Beckmann交通平衡模型:
min Z(x)
xa 0
ta
(
)d
a
subject to
k
f
rs k
qrs
f
rs k
0
各路段阻抗函数积分和最小化
交通流守恒:
各路径交通量之和等于OD交通量
路径流量非负
其中,路段交通量 xa
f rs rs k a,k
r sk
18
三、平衡分配方法
c1=5+0.1f1 q=f1+f2=100辆
路径1
用户平衡的模型化
c2=10+0.025f2
路径2
Wardrop第一原理:同一OD对间所有被利用路径的旅 行时间相等,且不大于其他未被利用路径的旅行时间
平衡条件
c1 min(c1, c2 ) c1 min(c1, c2 )
15
二、非平衡分配方法
增量分配法(Incremental Assignment Method) 考虑交通量对路阻的影响。 分配思路:逐次分配部分OD交通量,根据路网流动状 况,决定下次分配的最短路径 将OD表分为若干个份(等分或不等分),每次分配一份 每份OD表分配前,重新计算路网上各路段的阻抗和 各OD对的最短径路 每份OD表均按全有全无法分配到相应的最短路径上
【转】c语言动态与静态分配

【转】c语⾔动态与静态分配内存的静态分配和动态分配的区别主要是两个:⼀是时间不同。
静态分配发⽣在程序编译和连接的时候。
动态分配则发⽣在程序调⼊和执⾏的时候。
⼆是空间不同。
堆都是动态分配的,没有静态分配的堆。
栈有2种分配⽅式:静态分配和动态分配。
静态分配是编译器完成的,⽐如局部变量的分配。
动态分配由函数malloc进⾏分配。
不过栈的动态分配和堆不同,他的动态分配是由编译器进⾏释放,⽆需我们⼿⼯实现。
对于⼀个进程的内存空间⽽⾔,可以在逻辑上分成3个部份:代码区,静态数据区和动态数据区。
动态数据区⼀般就是“堆栈”。
“栈(stack)”和“堆(heap)”是两种不同的动态数据区,栈是⼀种线性结构,堆是⼀种链式结构。
进程的每个线程都有私有的“栈”,所以每个线程虽然代码⼀样,但本地变量的数据都是互不⼲扰。
⼀个堆栈可以通过“基地址”和“栈顶”地址来描述。
全局变量和静态变量分配在静态数据区,本地变量分配在动态数据区,即堆栈中。
程序通过堆栈的基地址和偏移量来访问本地变量。
⼀般,⽤static修饰的变量,全局变量位于静态数据区。
函数调⽤过程中的参数,返回地址,EBP和局部变量都采⽤栈的⽅式存放。
所谓动态内存分配就是指在程序执⾏的过程中动态地分配或者回收存储空间的分配内存的⽅法。
动态内存分配不象数组等静态内存分配⽅法那样需要预先分配存储空间,⽽是由系统根据程序的需要即时分配,且分配的⼤⼩就是程序要求的⼤⼩。
例如我们定义⼀个float型数组:float score[100]; 但是,在使⽤数组的时候,总有⼀个问题困扰着我们:数组应该有多⼤?在很多的情况下,你并不能确定要使⽤多⼤的数组,⽐如上例,你可能并不知道我们要定义的这个数组到底有多⼤,那么你就要把数组定义得⾜够⼤。
这样,你的程序在运⾏时就申请了固定⼤⼩的你认为⾜够⼤的内存空间。
即使你知道你想利⽤的空间⼤⼩,但是如果因为某种特殊原因空间利⽤的⼤⼩有增加或者减少,你⼜必须重新去修改程序,扩⼤数组的存储范围。
武汉理工交通规划期末复习知识点汇总)
武汉理⼯交通规划期末复习知识点汇总)1、交通规划指导思想要有战略⾼度;要有全局观念;体现可持续发展观念;符合经济发展原则2、交通规划原则交通运输建设服务于经济发展原则综合运输协调发展原则局部服从整体原则近期与远期相结合原则需要与可能相结合原则理论与实践相结合原则3、交通属性通常被⼴义定义为“⼈、货物、信息”的地点间,并且伴随着⼈的思维意识的移动,移动本⾝有价值,移动的结果有价值4、城市的四⼤功能(雅典宪章)⼯作、休憩、交通、居住5、交通区划分定义:在道路交通规划研究过程中,需要将交通源合并成若⼲⼩区,这些⼩区称为交通曲原则:交通区划分⾸先应确定划分交通区的区域;交通区划分的多少、⼤⼩应视研究⽬的和交通复杂程度⽽定;交通区的划分⼀般不应打破⾏政区划;交通区内的⽤地性质,交通特点等应尽量⼀致6、OD调查定义:为了全⾯了解交通源和交通流,以及交通源的发⽣规律对⼈、车、货的移动,从出发到终⽌过程的全⾯情况,以及有关⼈、车、货的基本情况所进⾏的调查内容:⼈的出⾏、机动车的出⾏、货流出⾏od调查术语:出⾏:⼈、车、货为完成某⼀⽬的(如上班、上学、购物等)从起点到讫点的全过程,出⾏的基本属性:每次出⾏有起讫点两个端点‘每次出⾏有⼀定的⽬的;每次出⾏采取⼀种或⼏种交通⽅式;每次出⾏必须通过有路名的道路或街巷;步⾏单程时间5分钟以上或⾃⾏车的单程距离400⽶以上。
⼩区形⼼:交通出⾏端点密度分布的重⼼位置,即交通区交通出⾏的中⼼点,不是该交通区的⼏何中⼼期望线:为连接各交通重⼼间的直线,是交通之间的最短出⾏距离,因为反应最短距离⽽得名,其宽度表⽰交通区之间出⾏次数。
主流倾向线:综合倾向线,将若⼲流向相近的期望线合并汇总⽽成,⽬的是简化期望线图,突出交通主要流向分割核查线:为校核OD调查成果精度⽽在交通区内部按天然或⼈⼯障碍设定的调查线,可设⼀条或多条,分隔核查线将调查区划分为⼏个部分,⽤于实测穿越核查线的各条断⾯上的交通量。
dijkstra算法代码c语言
dijkstra算法代码c语言Dijkstra算法代码C语言简介Dijkstra算法是一种用于寻找带权有向图中最短路径的经典算法。
它由荷兰计算机科学家Edsger Dijkstra于1956年发明。
本文将介绍Dijkstra算法的基本原理和用C语言实现的代码。
算法原理1.初始化:设定一个起始点,将起始点到其他所有点的距离初始为无穷大,将起始点到自身的距离设为0,创建一个空的集合用于存放已找到最短路径的点。
2.选取最短路径:从未找到最短路径的点中选择一个距离起始点最近的点,将其加入到已找到最短路径的点的集合中。
3.更新距离:对于新加入的点,更新它周围点到起始点的最短距离。
如果通过新加入的点到达某个点的距离比当前已知最短距离小,则更新该点的最短距离。
4.重复步骤2和步骤3,直到所有点都找到最短路径。
C语言实现下面是用C语言实现Dijkstra算法的代码:#include <>#include <>#define SIZE 10#define INFINITY 9999void dijkstra(int graph[SIZE][SIZE], int startNode) {int distance[SIZE];bool visited[SIZE];for (int i = 0; i < SIZE; i++) {distance[i] = INFINITY;visited[i] = false;}distance[startNode] = 0;for (int count = 0; count < SIZE - 1; count++) {int minDistance = INFINITY;int minIndex;for (int i = 0; i < SIZE; i++) {if (!visited[i] && distance[i] <= minDistanc e) {minDistance = distance[i];minIndex = i;}}visited[minIndex] = true;for (int i = 0; i < SIZE; i++) {if (!visited[i] && graph[minIndex][i] && dis tance[minIndex] != INFINITY &&distance[minIndex] + graph[minIndex][i] < distance[i]) {distance[i] = distance[minIndex] + graph [minIndex][i];}}}printf("最短路径为:\n");for (int i = 0; i < SIZE; i++) {printf("%d 到 %d 的距离: %d\n", startNode, i, di stance[i]);}}int main() {int graph[SIZE][SIZE] = {{0, 6, 0, 1, 0},{6, 0, 5, 2, 2},{0, 5, 0, 0, 5},{1, 2, 0, 0, 1},{0, 2, 5, 1, 0}};int startNode = 0; // 起始点的索引dijkstra(graph, startNode);return 0;}总结Dijkstra算法是解决最短路径问题的一种有效方法。
mpc控制c代码

MPC控制器C代码模型预测控制(MPC)是一种先进的控制策略,它使用数学模型预测系统的未来行为,并优化控制输入以实现特定的目标。
在编写MPC控制器的C代码时,通常需要以下几个步骤:1.定义系统模型:根据实际系统的动态特性,使用数学模型描述系统的行为。
在C语言中,可以使用结构体或类来定义系统的状态、输入和输出等变量。
2.定义MPC控制器:根据系统模型和目标,编写MPC控制器的算法。
在C语言中,可以使用循环结构和条件语句来实现控制算法。
3.计算优化问题:MPC控制器需要解决一个优化问题,以确定最优的控制输入。
在C语言中,可以使用数值优化算法(如梯度下降法、牛顿法等)来求解优化问题。
4.实现控制输入:根据计算出的最优控制输入,实现控制系统的实际输入。
在C语言中,可以使用函数或指针来实现控制输入的输出。
以下是一个简单的MPC控制器的C代码示例:#include <stdio.h>#include <stdlib.h>#include <math.h>// 定义系统模型typedef struct {double x; // 状态变量double u; // 控制输入double y; // 输出} System;// 定义MPC控制器void MPC_Controller(System* system, double target_y, double* control_input) {// 计算最优控制输入double min_u = system->u - 0.1; // 最大允许输入减小0.1double max_u = system->u + 0.1; // 最大允许输入增加0.1double optimal_u = system->u + (target_y - system->y) / system->x; // 计算最优控制输入control_input[0] = fmin(fmax(optimal_u, min_u), max_u); // 取最优控制输入的上下界之间的值}int main() {// 初始化系统模型和控制输入System system = {1.0, 0.0, 0.0}; // 系统初始状态为x=1, u=0, y=0double control_input[1] = {0.0}; // 控制输入初始化为0double target_y = 0.5; // 目标输出为0.5// 进行MPC控制for (int i = 0; i < 10; i++) {MPC_Controller(&system, target_y, control_input); // 调用MPC控制器函数,计算最优控制输入并输出到系统模型中system.u = control_input[0]; // 将计算出的最优控制输入赋值给系统模型的控制输入变量system.x = system.x + system.u; // 根据系统模型更新状态变量x的值system.y = system.x * system.u; // 根据系统模型计算输出变量y的值并输出到终端中printf("Time %d: x=%f, u=%f, y=%f", i, system.x, system.u, system.y); // 输出当前时间步长的状态变量x、控制输入u和输出y的值到终端中}return 0;}。
mpc算法c语言程序

mpc算法c语言程序Model Predictive Control (MPC) 是一种先进的控制策略,通常用于处理多变量系统。
以下是一个简单的MPC算法的C语言实现示例。
请注意,这是一个非常基础的示例,实际应用中的MPC算法会更复杂,并且需要根据具体应用场景进行相应的调整和优化。
```cinclude <>include <>// MPC 参数define N 10 // 预测的未来时间步数define M 2 // 控制输入的维度define Q 1 // 状态权重矩阵的维度// 状态和控制输入的维度define nx 2define nu 1// 状态和控制输入的限制define x_min -define x_maxdefine u_min -define u_max// 目标函数权重矩阵double Q[Q][Q] = { {} };// 系统动态函数 (这里使用一个简单的线性系统作为示例)void system_dynamics(double x[nx], double u[nu], double x_dot[nx]) { x_dot[0] = x[1]; // dx/dt = ux_dot[1] = 0; // du/dt = 0 (这里假设系统是线性的)}int main() {double x[nx] = {, }; // 初始状态double u[nu] = {}; // 初始控制输入double x_hist[N][nx]; // 历史状态数组double u_hist[N][nu]; // 历史控制输入数组double cost = ; // 总成本int i, j; // 循环变量int k = 0; // MPC的当前迭代次数double lambda; // 拉格朗日乘数double K[M][nx]; // 控制增益矩阵double x_next[nx]; // 下一个状态预测值double u_opt[nu]; // 最优控制输入double x_opt[N][nx]; // 最优状态序列double u_opt_hist[N][nu]; // 最优控制输入序列double cost_hist[N]; // 每一步的成本历史记录double H[Q][Q]; // 目标函数的Hessian矩阵double Kp[Q][Q]; // 对偶问题的解矩阵 (用于优化求解)double Hp[Q][Q]; // 对偶问题的Hessian矩阵 (用于优化求解) double Q_dual; // 对偶问题的解(用于优化求解)double grad_g[Q]; // 对偶问题的梯度(用于优化求解)double grad_h[M][Q]; // 对偶问题的梯度(用于优化求解)double x_bar[Q]; // 对偶问题的解(用于优化求解)double lambda_bar; // 对偶问题的解(用于优化求解)double y[Q]; // 对偶问题的解(用于优化求解)double z; // 对偶问题的解(用于优化求解)double z_old; // 对偶问题的解(用于优化求解)的上一步值double d; // 对偶问题的解(用于优化求解)的步长限制条件(Armijo-Goldstein条件)double c; // 对偶问题的解(用于优化求解)的步长限制条件(Wolfe条件)的下界值(通常取)double alpha; // 对偶问题的解(用于优化求解)的步长限制条件的乘子因子(通常取)int s; // 对偶问题的解(用于优化求解)的步长限制条件的迭代次数上限(通常取10)int flag = 1; // 对偶问题的解(用于优化求解)的步长限制条件的标志位,表示是否满足Armijo-Goldstein条件和Wolfe条件中的至少一个,如果为1表示满足,如果为0表示不满足。
c语言中的路径
c语言中的路径
在C语言中,路径指的是文件的位置或者文件夹的位置。
路径主要分为绝对路径和相对路径。
1. 绝对路径:绝对路径是从根目录开始的完整路径,可以唯一地定位到文件或文件夹的位置。
在Windows系统中,绝对路径以盘符开始(如C:\folder\file.txt),在Unix/Linux系统中,绝对路径以斜杠/开始(如/home/user/folder/file.txt)。
2. 相对路径:相对路径是相对于当前工作目录的路径。
当前工作目录可以通过函数`getcwd()`获取。
相对路径可以简化文件或文件夹的位置的描述。
常见的相对路径描述方法包括:
- 相对于当前工作目录的路径(如./folder/file.txt)。
- 相对于上级目录的路径(如../folder/file.txt)。
- 相对于指定目录的路径(如folder/file.txt)。
在C语言中,可以使用相关的文件操作函数(如`fopen()`、
`opendir()`等)来打开文件或文件夹。
需要注意的是,在使用路径时,需要使用正确的路径分隔符。
在Windows系统中使用反斜杠\作为路径分隔符,在Unix/Linux系统中使用正斜杠/作为路径分隔符。
为了避免平台差异,可以使用预定义的宏和函数(如`PATH_MAX`和`pathconf()`)来获取平台特定的最大路径长度。
固定分区算法,可变分区算法用最优分配算法c语言
固定分区算法,可变分区算法用最优分配算法c语言以下是固定分区算法和可变分区算法以及最优分配算法的C语言实现示例。
固定分区算法示例:```cinclude <>include <>int main() {int n, i, max_n;printf("Enter the number of processes: ");scanf("%d", &n);int p[n], s[n], f[n];printf("Enter the burst time of each process: ");for (i = 0; i < n; i++) {scanf("%d", &p[i]);}printf("Enter the service time of each process: ");for (i = 0; i < n; i++) {scanf("%d", &s[i]);}max_n = 0;for (i = 0; i < n; i++) {f[i] = p[i] / s[i];if (f[i] > max_n) {max_n = f[i];}}printf("The maximum number of fixed partitions is %d.\n", max_n); return 0;}```可变分区算法示例:```cinclude <>include <>include <>int main() {int n, i, j, k, m, t, s, p, a[100][100], f[100][100];printf("Enter the number of processes: ");scanf("%d", &n);printf("Enter the number of partitions: ");scanf("%d", &m);printf("Enter the burst time of each process: ");for (i = 0; i < n; i++) {scanf("%d", &p);s = (int)sqrt(p); // determine the number of partitions in which each process can be allocated dynamicallya[s][0]++; // record the number of processes that can be allocated to each partition dynamicallyfor (j = 1; j <= s; j++) { // calculate the waiting time and turnaround time of each process in each partition dynamicallya[j][j] = a[j - 1][j - 1] + p / j; // waiting time of current process in current partition dynamicallyfor (k = j - 1; k >= 1; k--) { // turnaround time of current process in all partitions dynamically up to current partition dynamicallya[k][j] = a[k][j - 1] + p / j; // waiting time and turnaround time of current process in all partitions dynamically up to current partition dynamically}}for (j = 1; j <= m; j++) { // calculate the response time and turnaround time of each partition dynamically up to current partition dynamically and record them in array f[][] dynamically up to current partition dynamicallyf[j][0] = a[s][s] / j; // response time of current partition dynamically up to current partition dynamically and record it in array f[][] dynamically up to current partition dynamicallyfor (k = 1; k <= s; k++) { // turnaround time of current partition dynamically up to current partition dynamically and record it in array f[][] dynamically up to current partition dynamicallyf[j][k] = f[j][k - 1] + a[k][s] / j; // waiting time and turnaround time of current partition dynamically up to current partition dynamically and record them in array f[][] dynamically up to current partition dynamically}} // end of calculation of response time and turnaround time of each partition dynamically up to current partition dynamically and record them in array f[][] dynamically up to current partition dynamically} // end of calculation of waiting time and turnaround time of each process in each partition dynamically and record them in array a[][] dynamically up to current partition dynamically and calculation of response time and turnaround time of each partition dynamically up to current partition dynamically and record them in array f[][] dynamically up to current partition dynamically for each process that can be allocated to each partition dynamically and each partition that can be allocated to each process dynamically respectively and initialization of array a[][] and array f[][] respectively for each process that can be allocated to each partition dynamically and each partition that can be allocated to each process dynamically respectively at the beginning of calculation for each process that can be allocated to each partition dynamically and each partition that can be allocated to each process dynamically respectively respectively before。
一种新的静态多路径交通分配模型

一种新的静态多路径交通分配模型
刘小艳;金宝辉;黄新建
【期刊名称】《交通标准化》
【年(卷),期】2003(000)010
【摘要】通过运用决策理论的思想对现有的两类静态多路径交通分配方法进行对比分析,提出决策系数的概念,将出行者个人行为引入交通分配模型,建立一种新的静态多路径交通分配模型,可使交通需求预测的结果更加精确,具有一定的实际意义.【总页数】4页(P50-53)
【作者】刘小艳;金宝辉;黄新建
【作者单位】西南交通大学交通运输学院,四川,成都,610031;西南交通大学交通运输学院,四川,成都,610031;西南交通大学交通运输学院,四川,成都,610031
【正文语种】中文
【中图分类】U12
【相关文献】
1.公路网规划中多路径交通分配模型的计算机实现 [J], 张维全;张宝玉
2.基于前景理论的改进多路径交通分配模型 [J], 潘晓锋;左志;赵胜川
3.静态多路径交通分配模型综述 [J], 胡昌君;陈文斌
4.一种新的GPS静态多路径削弱方法 [J], 楚亮;李欣
5.一种动态的多路径交通分配模型 [J], 王炜
因版权原因,仅展示原文概要,查看原文内容请购买。
静态多路径分配模型程序源代码(C++程序)
静态多路径分配模型程序源代码#include <iostream.h>#include<stdlib.h>#include <math.h>const int maxnum=100;const double maxint=99999;double dist1[maxnum],dist2[maxnum];int prev1[maxnum],prev2[maxnum];double c[maxnum][maxnum];double b[maxnum][maxnum],w[maxnum][maxnum];float v[maxnum][maxnum];int n,line,r,s,Q;void Dijkstra(int n,int v,double *dist,int *prev,double c[maxnum][maxnum]) {bool s[maxnum];for(int i=1;i<=n;++i){dist[i]=c[v][i];s[i]=0;if(dist[i]==maxint)prev[i]=0;elseprev[i]=v;}dist[v]=0;s[v]=1;for(i=2;i<=n;++i){double tmp=maxint;int u=v;for(int j=1;j<=n;++j)if((!s[j])&&dist[j]<tmp){u=j;tmp=dist[j];}s[u]=1;for(j=1;j<=n;++j)if((!s[j])&&c[u][j]<maxint){double newdist=dist[u]+c[u][j];if(newdist<dist[j]){dist[j]=newdist;prev[j]=u;}}}}void searchPath(int *prev,int v,int u){int que[maxnum];int tot=1;que[tot]=u;tot++;int tmp=prev[u];while(tmp!=v){que[tot]=tmp;tot++;tmp=prev[tmp];}que[tot]=v;for(int i=tot;i>=1;--i)if(i != 1)cout<<que[i]<<" -> ";elsecout<<que[i]<<endl;}void siranzhi(int n,double *dist1,double *dist2,double c[maxnum][maxnum],double b[maxnum][maxnum]){for(int i=1;i<=n;++i)for(int j=1;j<=n;++j)if(c[i][j]!=maxint)if(dist1[i]<dist1[j]&&dist2[i]>dist2[j])b[i][j]=exp((dist1[j]-dist1[i]-c[i][j]));else b[i][j]=0;for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(c[i][j]!=maxint)if((dist1[i]>=dist1[j]||dist2[i]<=dist2[j])&&b[j][i]>0)b[i][j]=maxint;}void quanzhong(int n,double *dist,int r,double b[maxnum][maxnum],double w[maxnum][maxnum]){bool t[maxnum];for(int i=1;i<=n;++i)t[i]=0;for(int m=1;m<n;++m){int u=r;double tmp=maxint;for(int j=1;j<=n;++j){if((t[j]==0)&&(dist[j]<tmp)){u=j;tmp=dist[j];}}t[u]=1;j=1;while(j<=9){if(b[u][j]!=maxint){if(u==r){w[u][j]=b[u][j];}else{double x=0;for(i=1;i<=n;++i){if((w[i][u]!=maxint)&&(b[i][u]!=maxint)){x+=w[i][u];}}w[u][j]=b[u][j]*x;}}j++;}}}void jiaotongliang(int n,double *dist,int r,double w[maxnum][maxnum],float v[maxnum][maxnum],int Q){bool t[maxnum];for(int i=1;i<=n;++i)t[i]=0;for(int m=1;m<n;++m){int u=r;double tmp=maxint;for(int j=1;j<=n;++j){if((t[j]==0)&&(dist[j]<tmp)){u=j;tmp=dist[j];}}t[u]=1;j=1;while(j<=9){if(w[j][u]!=maxint){double x=0;for(i=1;i<=n;++i){if(w[i][u]!=maxint){x+=w[i][u];}}if(u==r){v[j][u]=Q*w[j][u]/x;}else{double y=0;for(i=1;i<=n;++i){if((w[u][i]!=maxint)&&(v[u][i]!=maxint)){y+=v[u][i];}}if((y==0&&x==0)||(w[j][u]==0&&x==0))v[j][u]=0;else v[j][u]=w[j][u]*y/x;}}j++;}}}void main(){cout<< "节点数";cin>>n;cout<< "路段数";cin>>line;cout<< "起点";cin>>r;cout<< "终点";cin>>s;cout<< "交通量";cin>>Q;int p,q;double len;for(int i=1;i<=n;++i)for(int j=1;j<=n;++j){c[i][j]=maxint;b[i][j]=maxint;w[i][j]=maxint;v[i][j]=maxint;}for(i=1;i<=line;++i){cin>>p>>q>>len;if(len<c[p][q]){c[p][q]=len;c[q][p]=len;}}for(i=1; i<=n; ++i){dist1[i]=maxint;dist2[i]=maxint;}for(i=1;i<=n;++i){for(int j=1;j<=n;++j)cout<<c[i][j]<<"\t";cout<<endl;}Dijkstra(n,r,dist1,prev1,c);Dijkstra(n,s,dist2,prev2,c);cout<<"起点到终点的路径为: ";searchPath(prev1,r,s);for(i=1;i<=n;i++)cout<<"起点到"<<i<<"点的最短路径长度: "<<dist1[i]<<endl;cout<<"终点到起点的路径为: ";searchPath(prev2,s,r);for(i=1;i<=n;i++)cout<<"终点到"<<i<<"点的最短路径长度: "<<dist2[i]<<endl;siranzhi(n,dist1,dist2,c,b);for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(b[i][j]!=maxint)cout<<"路段"<<i<<j<<"似然值"<<b[i][j]<<endl;quanzhong(n,dist1,r,b,w);for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(w[i][j]!=maxint)cout<<"路段"<<i<<j<<"权重"<<w[i][j]<<endl;jiaotongliang(n,dist2,s,w,v,Q);for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(v[i][j]!=maxint)cout<<"路段"<<i<<j<<"交通量"<<v[i][j]<<endl;system("pause");}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静态多路径分配模型程序源代码#include <iostream.h>#include<stdlib.h>#include <math.h>const int maxnum=100;const double maxint=99999;double dist1[maxnum],dist2[maxnum];int prev1[maxnum],prev2[maxnum];double c[maxnum][maxnum];double b[maxnum][maxnum],w[maxnum][maxnum];float v[maxnum][maxnum];int n,line,r,s,Q;void Dijkstra(int n,int v,double *dist,int *prev,double c[maxnum][maxnum]) {bool s[maxnum];for(int i=1;i<=n;++i){dist[i]=c[v][i];s[i]=0;if(dist[i]==maxint)prev[i]=0;elseprev[i]=v;}dist[v]=0;s[v]=1;for(i=2;i<=n;++i){double tmp=maxint;int u=v;for(int j=1;j<=n;++j)if((!s[j])&&dist[j]<tmp){u=j;tmp=dist[j];}s[u]=1;for(j=1;j<=n;++j)if((!s[j])&&c[u][j]<maxint){double newdist=dist[u]+c[u][j];if(newdist<dist[j]){dist[j]=newdist;prev[j]=u;}}}}void searchPath(int *prev,int v,int u){int que[maxnum];int tot=1;que[tot]=u;tot++;int tmp=prev[u];while(tmp!=v){que[tot]=tmp;tot++;tmp=prev[tmp];}que[tot]=v;for(int i=tot;i>=1;--i)if(i != 1)cout<<que[i]<<" -> ";elsecout<<que[i]<<endl;}void siranzhi(int n,double *dist1,double *dist2,double c[maxnum][maxnum],double b[maxnum][maxnum]){for(int i=1;i<=n;++i)for(int j=1;j<=n;++j)if(c[i][j]!=maxint)if(dist1[i]<dist1[j]&&dist2[i]>dist2[j])b[i][j]=exp((dist1[j]-dist1[i]-c[i][j]));else b[i][j]=0;for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(c[i][j]!=maxint)if((dist1[i]>=dist1[j]||dist2[i]<=dist2[j])&&b[j][i]>0)b[i][j]=maxint;}void quanzhong(int n,double *dist,int r,double b[maxnum][maxnum],double w[maxnum][maxnum]){bool t[maxnum];for(int i=1;i<=n;++i)t[i]=0;for(int m=1;m<n;++m){int u=r;double tmp=maxint;for(int j=1;j<=n;++j){if((t[j]==0)&&(dist[j]<tmp)){u=j;tmp=dist[j];}}t[u]=1;j=1;while(j<=9){if(b[u][j]!=maxint){if(u==r){w[u][j]=b[u][j];}else{double x=0;for(i=1;i<=n;++i){if((w[i][u]!=maxint)&&(b[i][u]!=maxint)){x+=w[i][u];}}w[u][j]=b[u][j]*x;}}j++;}}}void jiaotongliang(int n,double *dist,int r,double w[maxnum][maxnum],float v[maxnum][maxnum],int Q){bool t[maxnum];for(int i=1;i<=n;++i)t[i]=0;for(int m=1;m<n;++m){int u=r;double tmp=maxint;for(int j=1;j<=n;++j){if((t[j]==0)&&(dist[j]<tmp)){u=j;tmp=dist[j];}}t[u]=1;j=1;while(j<=9){if(w[j][u]!=maxint){double x=0;for(i=1;i<=n;++i){if(w[i][u]!=maxint){x+=w[i][u];}}if(u==r){v[j][u]=Q*w[j][u]/x;}else{double y=0;for(i=1;i<=n;++i){if((w[u][i]!=maxint)&&(v[u][i]!=maxint)){y+=v[u][i];}}if((y==0&&x==0)||(w[j][u]==0&&x==0))v[j][u]=0;else v[j][u]=w[j][u]*y/x;}}j++;}}}void main(){cout<< "节点数";cin>>n;cout<< "路段数";cin>>line;cout<< "起点";cin>>r;cout<< "终点";cin>>s;cout<< "交通量";cin>>Q;int p,q;double len;for(int i=1;i<=n;++i)for(int j=1;j<=n;++j){c[i][j]=maxint;b[i][j]=maxint;w[i][j]=maxint;v[i][j]=maxint;}for(i=1;i<=line;++i){cin>>p>>q>>len;if(len<c[p][q]){c[p][q]=len;c[q][p]=len;}}for(i=1; i<=n; ++i){dist1[i]=maxint;dist2[i]=maxint;}for(i=1;i<=n;++i){for(int j=1;j<=n;++j)cout<<c[i][j]<<"\t";cout<<endl;}Dijkstra(n,r,dist1,prev1,c);Dijkstra(n,s,dist2,prev2,c);cout<<"起点到终点的路径为: ";searchPath(prev1,r,s);for(i=1;i<=n;i++)cout<<"起点到"<<i<<"点的最短路径长度: "<<dist1[i]<<endl;cout<<"终点到起点的路径为: ";searchPath(prev2,s,r);for(i=1;i<=n;i++)cout<<"终点到"<<i<<"点的最短路径长度: "<<dist2[i]<<endl;siranzhi(n,dist1,dist2,c,b);for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(b[i][j]!=maxint)cout<<"路段"<<i<<j<<"似然值"<<b[i][j]<<endl;quanzhong(n,dist1,r,b,w);for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(w[i][j]!=maxint)cout<<"路段"<<i<<j<<"权重"<<w[i][j]<<endl;jiaotongliang(n,dist2,s,w,v,Q);for(i=1;i<=n;++i)for(int j=1;j<=n;++j)if(v[i][j]!=maxint)cout<<"路段"<<i<<j<<"交通量"<<v[i][j]<<endl;system("pause");}。