3维坐标转换参数直接计算的严密公式
GNSS-RTK坐标转换参数与转换精度分析

GNSS-RTK!"8換参+分析郭凯(自然资源部第四地形测量队,黑龙江哈尔滨150025)摘要由于GNSS-RTK测量得到的坐标为WGS-84地心坐标系下的大地坐标(B,L,H),而我国工程建设使用的坐标为CGCS2000坐标系下的平面坐标或区域独立平面直角坐标,这就需要通过一定的方法实现两个坐标系间的转换;将WGS-84椭球下的坐标转为CGCS2000坐标系下的坐标一般采用“布尔莎七参数模型”或“莫洛登斯基三参数模型”;椭球之间或一个椭球下的两种不同平面坐标的转换通常采用“二维四参数模型”;GNSS测量得到的大地高转换为1985国家高程(正常高)一般使用“高程拟合法”完成。
文章阐述了坐标转换的相关理论并结合工程实际对GNSS-RTK坐标转换精度进行分析。
关键词GNSS-RTK;七参数;四参数;高程拟合;精度分析中图分类号P24文献标识码B文章编号2095-6319(2020)02-0025-030■引言GNSS-RTK测量方式采用载波相位差分实时动态相对定位技术,能够全天候快速地获取地球表面点的空间坐标,其定位精度能够达到厘米级。
相对传统的全站仪等测量仪器,GNSS-RTK作业方法测站间不需要通视,可以全天候作业,单人作业极大地提高了工作效率。
GNSS-RTK观测的三维坐标(B,L,H)为基于WGS-84地心坐标下的大地坐标,需要将其转换为当地坐标供工程用,测量业采用的参考椭球为CGCS2000地心椭球,所以WGS-84坐标向CGCS2000坐标转换是不同基准之间的转换。
#■坐标转换数学模型两种不球坐标间的转换范围较大时一般采用,范围较时采用基三参两种不面坐标(x,y)转换采用,GNSS测大地高(H)高(h)转换采用“高程 。
1.1布尔莎七参数模型用于大范围的不同地球椭球基准下的大地坐标统间点位坐标转换叭两空间坐标动点三T x,Ty, T z,的两空间坐标系坐标不同,三转参数R X,R,R Z,为了使两坐标统一,需乘以D。
测量论文题目集
测量论文题目集(测量专业本科参考论文题目)1. 1954北京坐标与1980西安坐标转换方法研究2. 1/2000数字地面模型在高速公路勘测中的精度验证及应用3. 1:1000比例尺土地利用现状图数据库的建立4. 1:1万DLG预处理数据入库前的质量检查5 .1:1万地形图高程注记点采集方法研究6. 1:2000数字正摄影像质量检查方法探讨7. 1:50000数字地形图缩编质量控制的探讨8. 1:5万DLG空间数据位置精度的分析与研究9. 1:5万地名数据库到1:1万地名数据库转换的研究与开发10. 1:5万矢量地形数据的质量评定11. 1:5万矢量地形数据空间拓扑关系的自动检查方法12. 3S技术在公路景观环境评价中的应用初探13. 3维坐标转换参数直接计算的严密公式14 .ArcGIS8_3Topolopy规则在地籍数据处理中的应用15. ArcInfo数据格式(Coverage)转换到MapInfo数据格式(Tab)的工艺设计与编程实现16. Arc_Info平台城镇地籍信息管理系统的分析设计与开发17. Astech Z-12测量仪RTK系统配置18. AutoCAD ActiveX在测绘程序中的应用19. AutoCAD Land Development Desktop在测绘工程中的应用20. AutoCAD Map2000在图形接边中的应用21. AutoCAD Map的拓扑分析功能及其应用研究22. AUTOCAD2002在道路勘测设计中的应用23. AUTOCAD2002在道路勘测设计中的应用24 .AutoCAD2004在大屯矿区地形图修测中的应用25. AutoCADLandDevelopmentDesktop在测绘工程中的应用26. AutoCADVBA在机场净空测量中的应用27 AutoCAD_MapInfo和城镇地籍信息系统数据转换匹配的初步探讨28. AUTOCAD与Arc/Info_GIS文本数据的转换及GIS文本数据库的建立29. AutoCAD与VCT数据格式转换实现30. AutoCAD与其他常用软件的数据转换31. AutoCAD中DXF文件的坐标转换分析与实现32. AutoCAD中实现文本输入的几种方法33. AUTOCAD二次开发在铁路航测制图中的应用34 AutoCAD及全站仪在极坐标法放样中的应用35 AutoCAD和Arc/Info数据转换36 AutoCAD在土地测量中的应用37 AutoCAD地形图数据转换为GIS空间数据的技术研究与应用38 AutoCAD平台上数字线划图的建库方法研究39 AutoCAD快速展点方法的再介绍40 AutoCAD数据在基于Imagis建模中的预处理与质量控制41 AutoCAD数据接边检查自动化的实现42 AutoCAD的二次开发43 Autodesk Map 2004在铁道勘测设计一体化中的应用探讨44 BPSA混合策略在GPS高程拟合中的应用45 CAD Polline线的抽稀与圆滑46 CAD Polyline线的抽稀与圆滑47 CadOverlay在扫描矢量化中的应用48 CAD地籍数据向GIS转换方法的探讨49 CAD环境下的导线3维辅助计算50 CARIS汉字问题解决方法探讨51 CASIO可编程计算器在土木工程教学中的应用实践52 CASS5.1软件在图纸资料管理中的应用53 CASS6_0地形地籍成图软件在应用中的经验和总结54 CASS、RDMS与MapGIS软件的地籍数据转换55 CASS与MapInfo的数据转换方法56 CASS地籍绘图软件铁路专用化的改进57 CASS测图软件中DTM的建立与应用58 CASS绘图软件在应用中的体验59 CASS软件在工程测量中的使用60 CCD数字摄影在天文定位测量中的应用探讨61 CorelDRAW12数字化制图在物探图件中的应用62 CorelDRAW在图形编辑中的运用63 DBSCAN空间聚类算法及其在城市规划中的应用64 Delaunay三角剖分的快速实现65 Delaunay三角网增点生长构造法研究66 Delaunay图在公共设施场址选择中的应用67 Delphi在工程测量中的应用68 DEM内插方法与精度评定69 DEM技术在土地利用可视化中的研究与应用70 DGPS水下立体定位系统的解析求解算法71 DiNi12数字水准仪数据文件格式与读取算法72 DInSAR技术对不同方位形变的敏感性研究73 DLT程序设计与应用74 DTM在土方计算中的应用75 EDMI测距房产面积测量精度估算方法的研究76 EDM三角高程测量误差分析77 EDM三角高程测量问题再讨论78 EM120型多波束测深系统及在深海测量中的应用79 ENVISAT测高卫星沿轨大地水准面梯度的海洋垂线偏差法研究80 Epscan2000中地形图图面整饰的实现81 EPSCAN与AutoCAD 14在行政区域界线勘界中的应用82 EPSW的二次开发83 Excel 2000在测绘中的应用84 Excel 2003在测量中的应用85 Excel_Word与CASS_AutoCAD_在测量绘图中的应用86 Excel、Word与CASS(AutoCAD)在测量绘图中的应用87 Excel与开思软件结合应用解决各种高程系间高程的相互转换问题88 Excel在坐标转换中的应用89 EXCEL在工程测量中的应用90 Excel在建筑物变形测量数据分析中的应用91 Excel在水准路线计算中的应用92 Excel在约旦18号死海海堤沉降监测中的应用93 Excel在经纬仪导线内业教学中的应用94 Excel用于工程控制网优化设计95 FME在空间数据加工项目中的应用96 fx-4500P计算器导线近似平差程序97 GeoCoM接口技术及其在测量中的应用98 GeoStar与MapInfo的数据组织比较研究99 GIS三维可视化在数字文化遗产中的应用100 GIS与GPS、GPRS结合在物流中的应用实例101 GIS与企业消防监控报警系统的集成方法研究102 GIS中CAD数据转换方法的研究103 GIS中多图幅自动接边的实现方法探讨104 GIS中多幅图自动接边功能的算法实现105 GIS中态势符号的建模与应用106 GIS中房产空间要素的GML描述与应用研究107 GIS中文查询系统中SQL语句的形成108 GIS中曲线综合平差模型的建立109 GIS中模型的表达110 GIS中河网空间数据模型111 GIS中直线元内插点精度及对误差带的影响112 GIS中顾及面积误差影响时叠置多边形误差状态分析113 GIS分析中的空间数据不确定性问题114 GIS叠置后同名点元不确定性的严密估计115 GIS在人口重心迁移研究中的应用116 GIS在供水管网信息管理系统中的应用117 GIS在农村住房防灾管理信息系统中的应用118 GIS在农用地分等中的应用119 GIS在国土管理中的应用120 GIS在土地价格评估中的应用121 GIS在土地估价业务中的应用122 GIS在土地登记中的应用设计123 GIS在地籍管理应用中若干关键技术探讨124 GIS在定向运动中的应用125 GIS在教育资源布局规划中的应用126 GIS在数字校园建设中的应用127 GIS在统计行业中的应用128 GIS在西部生态环境建设中的应用初探129 GIS在青海省高等级公路信息系统中的应用130 GIS应用模型分类体系与复杂性评价131 GIS技术在大庆油田动态监测系统建立应用中的探讨132 GIS技术在送电线路工程中的应用133 GIS技术在道路选线中的应用134 GIS支持下土地管理办公自动化及若干功能的实现135 GIS支持的常州市区域经济空间集聚特征研究136 GIS数字地图的制图技术初探137 GIS数据向交换格式数据转换的方法与实现138 GIS数据库与地图数据库关系辨析139 GIS数据库几何精度评价及验证方法初探140 GIS数据模型设计中的问题探讨141 GIS数据生产中几个关键问题的研究142 GIS时空数据模型在城市地下管线数据库中的应用143 GIS模糊可靠性分析的关键问题144 GIS模糊可靠性分析的基本理论145 GIS的应用与发展的探讨146 GIS空间数据不确定性与质量控制的研究现状147 GIS铁路用地管理系统的分析与设计148 Google Earth面面观149 GPRS无线数据传输技术在网络RTK系统中的应用研究150 GPR在地下管线探测中的应用151 GPS GIS在变形监测中的应用152 GPS RTK和全站仪相配合在城市地籍测量中的应用153 GPS RTK在地形测量中的应用实践154 GPS RTK技术在中、小比例尺地形图精度检测中的应用155 GPS RTK技术在临港产业区测量中的应用156 GPS RTK技术在城市测量中的应用157 GPS RTK测量作业方式的探讨158 GPS RTK测量技术在高压输电线路勘测工程中的应用159 GPS RTK点与城市导线精度匹配探讨160 GPS--RTK技术在高程注记点测量中的应用161 GPS-OEM原始数据向接收机自主交换格式的转换162 GPS-RTK技术在杭州湾跨海大桥地震勘测中的应用163 GPS-RTK技术在苏通大桥陆域范围定测中的应用164 GPS-RTK技术在高等级公路横断面测量中的应用165 GPSRTK和全站仪相配合在城市地籍测量中的应用166 GPSRTK在城镇地籍测量中的应用分析167 GPSRTK技术在地籍测量中的应用168 GPSRTK技术在繁华城区管网三维数据采集中的应用研究169 GPSRTK技术在铁路客运专线放线中的应用170 GPSRTK控制测量在地籍测量中的应用171 GPS_RTK在城市导线测量中的应用研究172 GPS_RTK在数字测图中的应用173 GPS_RTK在数字测图应用中的一些认识174 GPS_RTK技术在热力外线工程中的应用175 GPS_RTK技术的误差分析及质量控制176 GPS_RTK技术简介及在公路测量中的应用177 GPS_RTK测量中4参数和7参数应用的探讨178 GPS_RTK高程拟合方法研究179 GPS—RTK在数字测图应用中的一些认识180 GPS—RTK技术在高等级公路横断面测量中的应用181 GPS、GIS在变形监测中的应用182 GPS一RTK流动站误差影响分析与对策183 GPS三角高程测量的方法及其应用184 GPS三频非差观测数据周跳的自动探测与改正研究185 GPS与GIS集成技术在长江护岸工程中的应用186 GPS与InSAR技术在滑坡监测中的应用研究187 GPS与测距仪短距离测量精度探讨188 GPS事后相位差分坐标解算模型及其相关问题的研究189 GPS仪器偏差的求解方法及其对电子总量的影响190 GPS仪器检验中应注意的几个问题191 GPS伪距基线不同解算方法的比较192 GPS动态定位中自适应卡尔曼滤波方法的应用研究193 GPS动态实时打桩定位系统的框架设计与实现194 GPS动态数据处理中的快速Kalman滤波算法195 GPS及其RTK技术在公路勘测中的应用探讨196 GPS双频相位平滑伪距及其单点定位的精度研究197 GPS变形监测动态数据处理中卡尔曼滤波的应用198 GPS变形监测的SSDM方法的理论与实践199 GPS后处理动态法200 GPS和全站仪在小浪底库区测图高程控制中的应用201 GPS和水准测量相结合在工程中的应用202 GPS在公路桥梁施工控制测量中的应用203 GPS在公路测量中的应用204 GPS在吐鲁番市地籍测量中的应用205 GPS在土地测绘中的应用206 GPS在土地测绘中的应用及前景207 GPS在地籍控制测量中的应用208 GPS在地籍测量中的作用209 GPS在地籍测量控制网中的应用探讨210 GPS在地质勘探及地质填图方面的应用211 GPS在城镇地籍测量中的应用212 GPS在大同市工程测量中的应用方法213 GPS在工业厂区变形监测中的应用214 GPS在工程测量中的实践应用215 GPS在工程测量中的应用浅析216 GPS在应县木塔变形监测网中的应用研究217 GPS在控制测量中的应用与展望218 GPS在河道测量中的应用219 GPS在泰顺洪溪电站控制测量中的应用220 GPS在测量数据采集方面的应用及优势221 GPS在精密高程测量中的运用222 GPS在航测外业控制测量中的应用223 GPS在野外地质找矿工作中的应用浅析224 GPS在铁路基平测量中的应用225 GPS坐标与地方独立测量坐标系的转换问题研究226 GPS坐标向国家坐标转换的三维分离回归法227 GPS坐标向平面坐标系的转换——GPS定位在磁浮交通安全防护中的应用228 GPS城区地籍控制网的精度分析及高程拟合研究229 GPS城市地壳变形监测网的数据处理及精度分析230 GPS基线网数据处理系统的设计与实现231 GPS基线非线性解算的精度评定方法232 GPS外形观测技术在日本Haneji大坝中的应用233 GPS多路径效应实例计算与分析234 GPS定位技术在城区地籍测量中的应用_以江苏省泰州市为例235 GPS定位技术在工程测量中的应用236 GPS定位技术在高层建筑施工基准传递中的应用237 GPS定位系统在隧道施工控制测量中的应用238 GPS实时动态定位中的坐标转换及应用239 GPS实时监控系统及其在碾压施工中的应用240 GPS导航解算中几种非线性Kalman滤波的理论分析与比较241 GPS工程控制网坐标系的选择和短边GPS高程精度分析242 GPS工程控制网投影变形的处理243 GPS工程控制网投影面选择的简易方法244 GPS干扰和抗干扰技术的研究245 GPS广播星历参数拟合算法的探讨246 GPS广播星历误差影响诊断与预测模型研究247 GPS弦距与常规光电测距弦距的比较与分析248 GPS快速静态定位在航测像控中的应用249 GPS成果质量控制的若干问题250 GPS手持接收机的发展及应用251 GPS打桩定位测量监理技术252 GPS技术在三峡库区地质灾害专业监测中的应用253 GPS技术在公安勤务管理中的应用254 GPS技术在公路测量中的综合应用255 GPS技术在合肥市地籍更新调查中的应用256 GPS技术在商丘市控制网中的应用257 GPS技术在土地勘测定界中的应用258 GPS技术在地表滑坡变形观测中的应用与实践259 GPS技术在大气探测中的应用260 GPS技术在文一路——德胜路快速通道首级施工控制网中的应用261 GPS技术在水电工程中的应用及展望262 GPS技术在特大型跨海桥梁施工中的应用263 GPS技术在跨越障碍物水准测量中的应用264 GPS技术在铁路定测放线中的应用265 GPS技术给测绘界带来了一场革命266 GPS拟合高程在测量工程中的试验研究267 GPS接收机与PC机间串口通信的实现268 GPS接收机噪声对天线相位中心检测的影响分析269 GPS接收机性能之我见270 GPS控制网数据处理可视化管理的实现271 GPS控制网起算点的检验272 GPS控制网起算点的粗差探测273 GPS数据处理中工程投影面的再选取问题274 GPS方位角系统转换及其精度的探讨275 GPS星历对实时定位精度的影响研究276 GPS桥梁平面控制网的坐标转换277 GPS模糊可靠性分析的关键问题278 GPS水准在杭州湾跨海大桥中的应用279 GPS水准多项式曲面拟合模型研究280 GPS水准拟合模型的选取与模型误差的补偿281 GPS水准测量在大型带状测区中的应用282 GPS水准测量在高速公路高程控制测量中的应用研究283 GPS水准测量应用探讨284 GPS水准面拟合方法研究285 GPS水准高程拟合精度探讨286 GPS测定正高的方法及误差分析287 GPS测量中偏心观测归算方法288 GPS测量中已知重合点可靠性检验方法289 GPS测量地面沉降的可靠性及精度分析290 GPS测量数据与计算机实时通信的研究与实现291 GPS测高技术在无验潮水深测量中的应用292 GPS滑坡高程监测的数据处理问题293 GPS精密单点定位_PPP_原理_测试及应用294 GPS精密单点定位精度分析295 GPS精密星历的外推精度分析296 GPS结合全站仪在电力勘测中的应用297 GPS网地方独立坐标系坐标转换的一种简便方法298 GPS网平面基准点的可靠性分析299 GPS网的模拟优化设计300 GPS网稳健估计的实验分析301 GPS网络RTK中对流层延迟分析302 GPS网络RTK内插算法分析与比较303 GPS网络RTK技术及应用304 GPS解求测点正常高的实用方法305 GPS道路修测系统在中国公路网测绘工程中的应用306 GPS配合条带测深仪在黄河小浪底水库水下淤积测量中的应用307 GPS附合网3维平差的方法和应用308 GPS静态定位技术在滆湖公路大桥测量中的应用309 GPS非差相位动态定位中的质量控制过程310 GPS高程应用初探311 GPS高程应用的关键在于精化大地水准面312 GPS高程成果用于求解高程异常313 GPS高程拟全模型的优级选314 GPS高程拟合在长江三峡地区的应用研究315 GPS高程拟合模型的优选316 GPS高程拟合精度探讨317 GPS高程测量中大地水准面差距的计算318 GPS高程测量代替三等跨河水准测量的探讨319 GPS高程测量制约因素分析320 GPS高程测量在水利水电工程中的应用探索321 GPS高程测量应用于跨山水准测量的探讨322 GPS高程用于铁路测量的研究323 GPS高程转换中不同高程异常基准对正常高高差的影响324 GPS高程转换初探325 GPS高程转换方法和正常高计算326 GPS高程转换的模型参数优选与稳健估计327 GPS高程转换系统的研究及其应用328 GPS+GLONASS在变形监测中的应用探讨329 GPS,RTK流动站误差影响分析与对策330 GPS/INS系统HPR与OPK角元素的剖析与转换331 GridGNSS——网格化全球卫星导航系统332 Helava摄影测量工作站在既有铁路航测中的应用333 Helmert方差估计在桥梁跨江导线网中的应用334 Helmert方差分量估计在跨江水准测量中的应用335 ISO9000在地籍测绘工作中的实践研究336 ist.txt337 JX-4A DPW在大比例尺成图中的应用338 MapBasic开发地籍宗地图编辑工具条339 MapGIS6_5与AutoCAD2004的数据转换340 MAPGIS地籍管理系统中的宗地历史数据的管理341 MapGis地籍管理系统测试342 MAPGIS输出技巧343 MapInfo下范围查询功能的实现344 MapInfo与Delphi集成开发应用GIS方法探讨345 MapInfo与VB数据共享的实现346 MapInfo及WinSurfer在城镇土地定级估价中的综合应用347 MapObjects在地图打印中的应用研究348 MATLAB与Excel在测量数据处理中的应用349 MATLAB工具箱在测绘数据处理中的应用350 MicroStation数字测图系统及其在地籍测量中的应用351 Mobile-GIS中的数据组织模型研究352 MODIS数据在积雪检测中的应用353 NA3003电子水准仪在三峡工程安全监测中的应用354 OPTEC RT-2000红外线测距仪及平板光波测距仪355 Oracle空间数据库与VB集成开发GIS应用软件探讨356 PAKSEY大桥桥面线形的测量控制357 PC_E500外业记录程序的开发和应用358 PDA GPS在地质测绘中的应用359 PDA与全站仪连线的转接头的连线方法360 PDA支持下的高精度曲线测设系统的设计与实现361 PowerBuilder编程寻找复杂支导线的计算路径362 RDMS数字测图系统在地籍测量中的应用363 RTD实时动态GPS测量系统在三峡工程中的应用364 RTK GPS在无验潮水深测量中的应用365 RTK GPS在超短基线声学定位系统安装校准中的应用366 RTK(实时差分)技术在石油物探测量中的应用367 RTK-GPS技术及其在道路测量中的应用368 RTK与城市一级导线测量的比较及精度分析369 RTK像片控制测量及其精度检验370 RTK和全站仪相配合在航道数字建模中的应用.wp 371 RTK在公路勘界中的应用372 RTK在地籍测量中用于图根控制的研究373 RTK在大比例尺地形图航测数字化测图中的应用374 RTK在市政工程测量中的应用375 RTK定位测量的误差分析及提高精度的关键376 RTK实时动态测量技术在株州市房产测量中的运用377 RTK技术及其在道路测量中的应用378 RTK技术在公路工程中的应用379 RTK技术在地籍测量中应用研究380 RTK技术在城市测量中的应用381 RTK技术在杭州湾跨海大桥桥位地形测绘中的应用382 RTK技术在沈阳市区图根控制测量中的应用383 RTK技术在烟台地籍测量工程中的应用384 RTK技术在矿区地形图测绘中的应用385 RTK技术在表面流向及流速测量中的应用386 RTK技术在送变电线路测量中的应用387 RTK技术在高速公路土地登记测量中的应用388 RTK技术建立图根控制点高程精度研究389 RTK技术的特点及提高成果精度的技术关键390 RTK技术的误差分析与处理391 RTK替代水准监测地面沉降的试验研究392 RTK模式测量城市一级控制网高程精度分析393 RTK测定房屋遮挡点方法研究394 RTK测量的方法与精度试验395 RTK测量精度检定方法探讨396 RTK的特点与误差分析397 RTK航道疏浚应用及工程坐标转换参数的获取398 RTK高差、水准高差组成混合网代替四等水准可行性的分析和研究399 SCSG2002在测绘工作中的应用400 SCS软件与GTS211D全站仪相结合在测量中的应用401 SMR棱镜常数测定402 SV300应用软件在镜铁山水电站引水隧洞中的应用403 TCA全站仪实现测量数据的全自动化处理404 Topcon全站仪内存在测绘中的应用405 VBA在GIS数据更新中的应用406 VBA在测量记录格式生成和计算中的应用407 VB在地籍测量中的应用408 VB环境下不规则三角网的算法设计与实现409 VB环境下计算机与全站仪的数据通讯方法410 VC、VB与FORTRAN的混合编程技术及其实现411 VC++与Matlab混合编程的图像处理412 VisualC_编程获取GPS观测数据413 VisualLISP在CASS4_0地形地籍成图软件中的应用414 VLL方法在自动获取建筑物高程中的应用415 VRSRTK在地籍测量中应用416 VR技术在城市地籍信息系统中的应用417 WALK软件在土地勘测定界中的高级应用418 Web GIS在城市地价监测体系建设中的应用419 WebGIS中浏览矢量图与属性数据的查询420 WebGIS二次开发中JSP与ASP的比较分析421 WebGIS开发中的RIA技术应用研究422 WGS_84坐标的转换423 Windows CE下手持电脑与全站仪通讯的软、硬件实现424 Windows CE下的地图显示引擎的开发与应用425 Windows串行通信编程技术及其在数字测绘中的应用426 World Wide Web(WWW)上矢量地图数据的多分辨率传输算法427 —种管线点平面精度计算的方法428 “准地籍测量”一种有效的地籍测量模式429 《一种快速求场地平均高程的好方法》的优化430 一体化基础地形地籍数据库的设计思想431 一种专题型空间信息系统数据模型和数据结构设计方法432 一种从高程格网中提取等高线的算法433 一种优化模糊度搜索方法的研究434 一种利用反S数学模型自动确定地图目标分形无标度区的新方法435 一种实现依比例街区自动合并的算法436 一种建筑物倾斜测量的方法437 一种快速求场地平均高程的好方法438 一种快速获取GPS控制网精确WGS_84坐标方法439 一种快速角点探测算子研究440 一种提高地图数据查询、统计速度的方法设计及实现441 一种数字线划图分层规范化处理442 一种新型的网络级城镇地籍管理系统设计及实现443 一种新的基于Wold分解的纹理分析方法444 一种新的空间凸多面体的生成算法445 一种新的经纬仪/全站仪工业测量系统标定算法446 一种检验GPS网中已知点可靠性的方法447 一种消除坡度分级图中“马赛克现象”的方法448 一种确定大地水准面重力位漂移δW的方法449 一种等高线自动绘制中断层处理的新方法450 一种自动识别地性线的新方法451 一种适合地籍数据坐标系转换的极坐标转换模型452 一种适用于视频全站仪的数码相机检校方法453 一种适用于铁路仿真的DEM数据融合方案454 一种野外测量方舱及其设计455 三种高程传递方法的精度分析456 三等金属线纹尺检定的不确定度评定457 三级检查在地籍调查测量中的应用458 三维地貌表示方法的演进459 三维坐标法在水坝变形观测中的应用460 三维景观网络发布的研究与实现461 三角高程在水网地区试验精度分析462 三角高程测量在山区公路建设中的应用463 三角高程测量在山区地形中的应用464 三角高程测量在山区隧道工程中的应用465 三角高程测量计算公式的讨论466 三角高程跨河水准测量的限差计算467 不动产地籍和产权登记信息系统468 不同数字空中三角测量软件数据转换方法469 不量仪器及棱镜高的三角高程测量470 不锈钢线尺在高程测量中的应用471 与缓和曲线及其平行线有关的面积计算472 与缓和曲线及其平行线有关的面积计算1473 东海大桥GPS监测阵列设计方案474 两种实用的水平位移观测方法及其精度分析475 中国古代地籍管理考析与启示476 中小城市首级GPS控制网布测方案的选择477 中比例尺地形图数字化方法研究478 中点全站仪法高程控制测量479 中西部地区建立现代地籍涉及的几个问题480 主成分估计在多项式曲面拟合GPS高程中的应用481 丽水市城市地下管线信息系统的设计与实现482 也谈三角高程测量中地球曲率的改正483 乡村居民地半解析法地籍测图的研究与实践484 二元样条最小二乘在地图投影数据加密中的应用485 二次曲面法进行GPS高程拟合研究486 交会法测定水平位移的精度分析487 从GPS推算大气水汽的误差分析488 从PC-1500到Pocket_PC489 从施工角度谈对公路设计的几点建议490 从等值线图形获取DAT和GRD格式的数据文件491 以GPS水准点作为起闭点的三角高程导线闭合差限差之讨论492 任意粗直线段的画法493 估算测边交会测量界址点精度的有关问题494 使用Surfer软件绘制地质图件和处理地质数据的方法495 使用混合语言开发图形系统_基于Mapinfo的二次开发技术496 供电线路勘测内外业一体化系统的开发和应用497 倒尺水准测量原理498 储量计算精度及可靠性的探讨499 光学经纬仪水平度盘偏心差分析500 光学经纬仪竖盘指标自动归零补偿器故障分析及处理501 光电测深和激光投点技术在矿井联系测量中的试验研究502 光电测距仪气象改正通用公式的探讨503 光电测量仪进行高程控制与常规视尺水准比较504 免棱镜反射全站仪在房产测绘中的应用505 全数字化地形图测量数据检测精度分析506 全数字摄影测量在莫高窟崖面保护中的应用507 全数字空中三角测量中特殊问题的处理方法508 全数字空中三角测量数据检查验收及质量评价方法的探讨509 全球定位系统_GPS_接收机的检验及维护510 全球定位系统准动态测量定位技术在准噶尔盆地重磁勘探中的应用511 全站仪+OLE自动化实现宗地图地籍图的内外业一体化技术512 全站仪ATR功能在隧道围岩收敛测量中的应用513 全站仪_OLE自动化实现宗地图内外业一体化技术514 全站仪_一测回竖直角测角标准偏差_的测量结果不确定度515 全站仪“一测回竖直角测角标准偏差”的测量结果不确定度516 全站仪三维导线的精度匹配517 全站仪三角水准在山区铁路工程测量中的应用518 全站仪三角高程测量的新方法519 全站仪三轴误差的检验分析520 全站仪两点参考线测量与放样及其在工程中的应用521 全站仪交会法在供水塔变形安全监测中的应用522 全站仪假定坐标测量取代水准测量方法探讨523 全站仪偏心测量在道路施工中的应用524 全站仪固定样地测树原理及精度分析525 全站仪圆柱偏心测量的原理及精度分析。
坐标系转换公式

零经线转换到格林威治子午线。 设椭球长半轴为 a ,短半轴为 b ,扁率倒数为 1/f ,那么
X = (ν +h)cosϕcosλ Y = (ν +h)cosϕ sin 中:ν 为纬度 ϕ 处的卯酉圈曲率半径,ν = a /(1 − e2 sin2 ϕ ) 0.5
2.坐标变换方法 2.1 大地坐标与地心坐标的变换
大地经纬度坐标(纬度 ϕ ,经度 λ )可以用地心直角坐标 X、Y、Z 表示,其中,直角 坐标系原点位于地心;Z 轴为极轴,向北为正;X 轴穿过本初子午线与赤道的交点;Y 轴穿 过赤道与东经 90°的交点。 本文设定坐标系的零经线为格林威治子午线, 如果定义不一致, 在使用各公式前首先将
数学上,如果一维坐标系的原点沿轴的正向移动距离 A(A > 0) ,那么转换公式为:
X new = X old − A
然而,在坐标系转换中,通常将偏移量视作校正值,符号与数学上相反,EPSG 自 1999 年 起采用该协定至今。这样,原坐标值加上一个校正参数就得到新坐标值:
Xt = X s + A
其中,Xs 和 Xt 分别为原坐标系和新坐标系的坐标值;A 为转换参数,通过该参数将坐标值 从原坐标系转换到新坐标系。
坐标系转换公式
青岛海洋地质研究所 戴勤奋 译 (Email: qddqinfen@) 本 文 译 自 国 际 石 油 技 术 软 件 开 放 公 司 ( ) 文 献 “ Coordinate Conversions and Transformations including Formulas ” part 2 – – “ Formulas for Coordinate Operations other than Map Projections ” 。原文献由 EPSG(欧洲石油勘探组织)编写,初稿时 间 1995,最新更新时间 2004 年 1 月。世界各国参考椭球体参数及基准面转换参数,可参考 (/military/library/policy/army/fm/6-2/appe2.htm#tabe_22) 。
大欧拉角的空间直角坐标转换方法探讨
1姚吉利.3维坐标转换参数计算的严密公式[J].测绘通 报,2006,(5):7—10
2曾文宪,陶本藻.3维坐标转换的非线性模型l-J].武汉大 学学报(信息科学版),2003,28(5):566 568
3陈义,沈云中,刘大杰.适用于大旋转角的三维基准转换 的一种简便模型[J].武汉大学学报(信息科学版),2004, 29(12):1101—1104
4结论
4.1基于罗德里格矩阵的三维空间坐标变换模 型适合大欧拉角的坐标变换,解决了工程独立控 制网与国家坐标系统之间的坐标转换问题,适用 面广。 4.2旋转矩阵中ex,£y,e:为角度值,受三角函数周 期性的影响,在大欧拉角坐标转换时,模型稳定性 较差。利用罗德里格矩阵来代替旋转矩阵,其中的 a、b、e三个参数不受角度的周期性的影响,模型稳 定性好。 4.3该算法无需转换参数初始值,程序中以0为初 始值来计算,同样得到很好的转换参数结果,说明 该转换模型具有良好的可靠性。
4李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北 京:测绘出版社,2001
5周忠谟,易杰军,周琪.GPS卫星测量原理与应用[M].北 京:测绘出版社,2004
Discussion on the Way of Space Right-Angle Coordinate Transform of the Big Euler Angle
万方数据
大欧拉角的空间直角坐标转换方法探讨
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
胡亚江, 杨晓梅, 沙月进, Hu Yajiang, Yang Xiaomei, Sha Yuejin 东南大学交通学院,江苏,南京,210096
现代测绘 MODERN SURVEYING AND MAPPING 2006,29(6) 2次
布尔莎模型坐标转换适用范围及精度分析_张敬伟

表 6 七参数转换结果( 3) Tab. 6 Conversion result form seven parameters ( 3)
把七参坐标计算公式进行变换,求偏微分,再按误差传播 定律来计算转换中误差。进而确定转换参数的使用范围。
2. 1 列误差方程
首先对七参数计 算 公 式 进 行 变 换,以,ΔX,ΔY,ΔZ, εX ,εY ,εZ ,m 为未知数,按间接平差方法列出每个重合点 的误差方程,一个重合点能列出三个方程,七个未知数最 少需要三个重 合 点 才 能 解 算 出 七 参 数,如 果 超 过 三 个 重 合点,则列出 全 部 误 差 方 程。 整 理 后 的 误 差 方 程 标 准 格 式如下:
[4] 熊 介. 椭 球 大 地 测 量 学[M]. 北 京: 解 放 军 出 版 社,1979.
[5] 王玉成,胡伍生. 坐标转换中公共点选取对于转换精度 的影响[J]. 现代测绘,2008,31( 5) : 13 - 15.
第 36 卷 第 1 期 2013 年 1 月
测绘与空间地理信息
GEOMATICS & SPATIAL INFORMATION TECHNOLOGY
Vol. 36,No. 1 Jan. ,2013
布尔莎模型坐标转换适用范围及精度分析
张敬伟1,2
(1. 河南建筑职业技术学院,河南 郑州 450007;2. 河南省建筑工程学校,河南 郑州 450007)
表 3 四参数转换结果( 2) Tab. 3 Conversion result from four parameters ( 2)
3维坐标转换参数直接计算的严密公式
YT2 - YT1 YT3 - YT1
ZT2 - ZT1 ZT3 - ZT1
(14)
XT4 - XT1 YT4 - YT1 ZT4 - ZT1 解出旋转矩阵后 , 由式 (7d) 计算得到反对称矩阵或
其 3 元素公式
S = 2 ( I + RT) - 1 - I
(15)
再按式 (12) 计算平移参数 。
θ=
-
arctan
b1 b2
ψ=
-
arctan
a3 c3
(5)
< = arcsin b3
但在任意条件下 , 3 个角取值范围是 0°~360°, 具体
大小无法判断 ,由式 (3) 才能判断出具体大小 。实际
应用中 ,只要解出转换矩阵就能达到坐标转换的目
a1 a2 a3
的 。设 R = b1 b2 b3 是一个正交矩阵 , 其 9 个
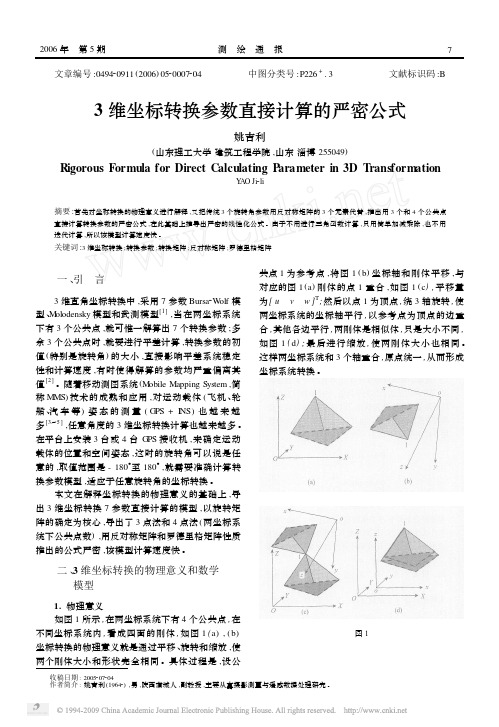
本文在解释坐标转换的物理意义的基础上 ,导 出 3 维坐标转换 7 参数直接计算的模型 ,以旋转矩 阵的确定为核心 ,导出了 3 点法和 4 点法 (两坐标系 统下公共点数) ,用反对称矩阵和罗德里格矩阵性质 推出的公式严密 ,该模型计算速度快 。
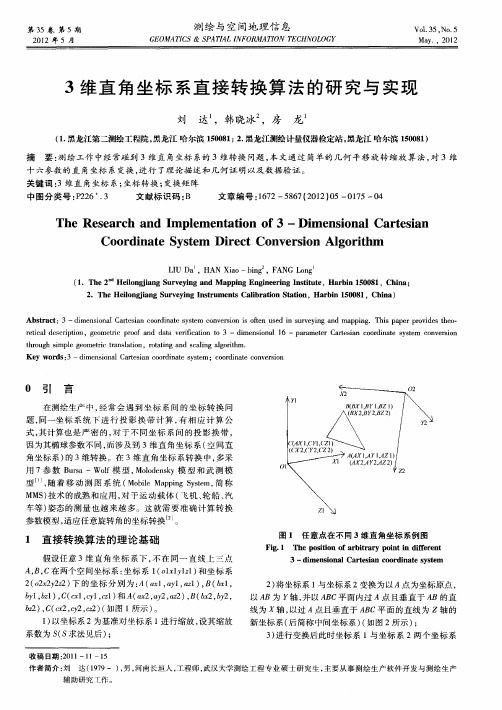
共点 1 为参考点 ,将图 1 ( b) 坐标轴和刚体平移 ,与 对应的图 1 (a) 刚体的点 1 重合 ,如图 1 (c) , 平移量 为[ u v w ]T;然后以点 1 为顶点 , 绕 3 轴旋转 , 使 两坐标系统的坐标轴平行 , 以参考点为顶点的边重 合 ,其他各边平行 ,两刚体是相似体 ,只是大小不同 , 如图 1 ( d) ; 最后进行缩放 , 使两刚体大小也相同。 这样两坐标系统和 3 个轴重合 ,原点统一 ,从而形成 坐标系统转换 。
c
三维四参数空间直角坐标转换计算方法

一、引言在地图制图、航空航天、导航定位等领域,经常需要进行三维空间直角坐标的转换计算。
在进行这类计算时,常常会涉及到三维四参数空间直角坐标的转换。
本文将介绍三维四参数空间直角坐标转换的计算方法及其应用。
二、三维四参数空间直角坐标的定义三维空间中,直角坐标系通常用(x, y, z)表示。
在进行坐标转换时,需要考虑到可能存在的平移、旋转、缩放等变换。
三维四参数空间直角坐标则包括了平移在x、y、z三个方向上的位移和绕某个轴的旋转角度。
三、三维四参数空间直角坐标转换的计算方法1. 平移变换的计算方法平移变换是指在x、y、z三个方向上的位移。
假设平移量分别为tx、ty、tz,那么进行平移变换后的坐标可以表示为:x' = x + txy' = y + tyz' = z + tz2. 旋转变换的计算方法绕某个轴的旋转变换通常用旋转矩阵来表示。
以绕z轴的旋转为例,旋转角度为θ,那么进行旋转变换后的坐标可以表示为:x' = x*cosθ - y*sinθy' = x*sinθ + y*cosθz' = z3. 综合变换的计算方法综合平移和旋转变换后,坐标的变换可以表示为:x' = (x - xs)*cosθ - (y - ys)*sinθ + xty' = (x - xs)*sinθ + (y - ys)*cosθ + ytz' = z + zt四、三维四参数空间直角坐标转换的应用在实际应用中,三维四参数空间直角坐标转换通常用于地图制图、航空航天、导航定位等领域。
在地图制图中,需要将世界坐标系中的地理坐标转换为局部坐标系中的平面坐标,就需要进行三维四参数空间直角坐标的转换。
在航空航天领域,导航定位系统也需要进行三维坐标的转换计算,以确定飞行器的位置和姿态。
五、结论三维四参数空间直角坐标转换是现代科学技术中常见的数学计算方法,具有广泛的应用价值。
非线性坐标转换模型及其解算方法
9
3 3
l3 l
90 0
355534 6 4 2 . 1
16 6 2 .9 989192
测绘 技术 装 备
季刊
第 1 4卷
21 0 2年第 2期
学术研 究 9
并 将 由第 一 组 转换 参 数 求得 的 目的坐标 按 克 拉 索夫
序 号
1 2
斯 基椭 球 参数 投影 到 我 国采 用 的高 斯投 影六 度 带 。
Y I () n
1 5 0 0 . 0 9000 00 1 5 5 0 . 5 99 5656 16 0 6 8 5 9 91 2 . 7 1 5 0 0 . 0 9 0 00 0 0 15 4 9 . 6 99 4 5 2 2 16 9 0 . 3 980329 15 0 0 .0 900000 1 53 5 . 6 9 9 4 5 10
骤 a 继 续计 算 。 )
V= ( 一L )
非 线 性 平 差 的 目的就 是求 未 知 参 数 的最 小 二 乘
32 算例 .
首先 ,假 定 一组 源 坐 标 系 坐标 ,并 将 其 按 W S G
一
8 椭 球 参 数 投 影 到 我 国采 用 的 高 斯 投 影 六 度 带 4
c。 c。 c。
之
如
换
l j
8学 术研 究
测 绘技 术装 备
季刊
第 1 4卷
பைடு நூலகம்
21 0 2年第 2期
a =K c s 1 oQ
a =一 y i y 2 K n sQ b =K s Q 1 i n
b 2=KyoQ cs y
根据修正 的高斯一牛顿法 ,未知参数 x 的解算 过程 如 下 : a )计算 未知 参数 x的修 正值 :
测量施工坐标转换公式

测量施工坐标转换公式引言在测量施工中,我们经常会遇到需要进行坐标转换的情况。
例如,在进行地形测量时,我们常常需要将现场测得的坐标转换为工程坐标,以便于在施工过程中进行准确的定位和布点。
本文将介绍一种常用的测量施工坐标转换公式,帮助读者更好地理解和应用于实际工作中。
背景测量施工中的坐标转换是将不同坐标系下的坐标相互转换的过程。
常见的坐标系统包括地理坐标系、平面直角坐标系等。
在施工测量中,我们通常使用平面直角坐标系来描述和定位施工点位,因为平面直角坐标系具有简单、直观的特点。
坐标转换公式根据施工现场的具体情况,我们可以通过以下公式将测量点的坐标从一种坐标系转换为另一种坐标系:X1 = X0 + ΔXY1 = Y0 + ΔY在上述公式中,X1和Y1表示待求的新坐标点,X0和Y0表示已知的旧坐标点,ΔX和ΔY表示X轴和Y轴上的坐标差。
举例说明假设在地理坐标系下,测量点A的坐标为(120.5, 35.2),现需要将其转换为平面直角坐标系。
已知在平面直角坐标系下,起点的坐标为(1000, 2000)。
根据上述公式,可以进行如下计算:X1 = 1000 + (120.5 - 100) = 1020.5Y1 = 2000 + (35.2 - 20) = 2015.2因此,点A在平面直角坐标系下的坐标为(1020.5, 2015.2)。
注意事项在进行坐标转换时,需要注意以下几点:1.坐标系之间的转换需要有明确的参考和基准点,并保证参考和基准点在不同坐标系下的坐标是已知的。
2.确保使用的坐标系是准确、一致的,以避免转换过程中的误差累积。
3.转换过程中应严格按照坐标差进行计算,确保计算的准确性。
结论测量施工坐标转换是施工测量中常见的需求,通过合理的坐标转换公式,可以方便地将不同坐标系下的坐标相互转换。
本文介绍了一种常用的坐标转换公式,希望能帮助读者更好地理解和应用于实际工作中。
在进行坐标转换时,应注意参考和基准点的准确性,以及坐标系的一致性,以确保转换结果的准确性。
3维直角坐标系直接转换算法的研究与实现
M S 技 术 的成熟 和应 用 , 于运 动 载 体 ( 机 、 船 、 M ) 对 飞 轮 汽 车等 ) 姿态 的 测 量 也越 来 越 多 。这 就 需 要 准 确计 算 转 换 参数模 型 , 适应 任意旋 转角 的坐标 转换 。
图 1 任 意点在 不 同 3维直 角坐标 系例 图
刘 达 ,韩晓冰 ,房 龙
(. 1 黑龙江第二测绘工程院 , 黑龙江 哈 尔滨 1 08 ; . 5 0 1 2 黑龙江测绘计量仪器检定站 , 黑龙江 哈尔滨 1 08 ) 5 0 1
摘
要: 测绘 工作 中经常碰到 3维直 角坐标 系的 3维转换 问题 , 本文通过 简单的几何 平移旋转 缩放 算法 , 3维 对
Th s a c nd I p e e t to f3 - Di e so a r e i n e Re e r h a m l m n a i n o - m n i n lCa t sa - Co r i a e S se r c n e so g rt m o d n t y t m Die t Co v r i n Al o ih
t r u h sm pe g o ti r nsa in,r ttn nd s a ig ag rt h o g i l e me rc ta lto oai g a c ln o i l hm.
Ke r s 3一d me so a a e in c o d n t y t m;c o d n t o v r in y wo d : i n in lC r sa o r i ae s se t o r iae c n eso
坐标系转换问题及转换参数的计算方法
坐标系转换问题及转换参数的计算方法对于坐标系的转换,给很多GPS的使用者造成一些迷惑,尤其是对于刚刚接触的人,搞不明白到底是怎么一回事。
我对坐标系的转换问题,也是一知半解,对于没学过测量专业的人来说,各种参数的搞来搞去实在让人迷糊。
在我有限的理解范围内,我想在这里简单介绍一下,主要是抛砖引玉,希望能引出更多的高手来指点迷津。
我们常见的坐标转换问题,多数为WGS84转换成北京54或西安80坐标系。
其中WGS84坐标系属于大地坐标,就是我们常说的经纬度坐标,而北京54或者西安80属于平面直角坐标。
对于什么是大地坐标,什么是平面直角坐标,以及他们如何建立,我们可以另外讨论。
这里不多罗嗦。
那么,为什么要做这样的坐标转换呢?因为GPS卫星星历是以WGS84坐标系为根据而建立的,我国目前应用的地形图却属于1954年北京坐标系或1980年国家大地坐标系;因为不同坐标系之间存在着平移和旋转关系(WGS84坐标系与我国应用的坐标系之间的误差约为80),所以在我国应用GPS进行绝对定位必须进行坐标转换,转换后的绝对定位精度可由80提高到5-10米。
简单的来说,就一句话,减小误差,提高精度。
下面要说到的,才是我们要讨论的根本问题:如何在WGS84坐标系和北京54坐标系之间进行转换。
说到坐标系转换,还要罗嗦两句,就是上面提到过的椭球模型。
我们都知道,地球是一个近似的椭球体。
因此为了研究方便,科学家们根据各自的理论建立了不同的椭球模型来模拟地球的形状。
而且我们刚才讨论了半天的各种坐标系也是建立在这些椭球基准之上的。
比如北京54坐标系采用的就是克拉索夫斯基椭球模型。
而对应于WGS84坐标系有一个WGS84椭球,其常数采用IUGG第17届大会大地测量常数的推荐值。
WGS84椭球两个最常用的几何常数:长半轴:6378137±2(m);扁率:1:298.257223563之所以说到半长轴和扁率倒数是因为要在不同的坐标系之间转换,就需要转换不同的椭球基准。
坐标转换的计算公式

坐标转换的计算公式
坐标转换的计算公式
一参心大地坐标与参心空间直角坐标转换
1名词解释:A:参心空间直角坐标系:a)以参心0为坐标原点;
b)Z轴与参考椭球的短轴(旋转轴)相重合;c)X轴与起始子午面和赤道的交线重合;d)Y轴在赤道面上与X轴垂直,构成右手直角坐标系0-XYZ;e)地面点P的点位用(X,Y,Z)表示;B:参心大地坐标系:
a)以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合;
b)大地纬度B:以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B;c)大地经度L:以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L;d)大地高H:地面点沿椭球法线至椭球面的距离为大地高H;e)地面点的点位用(B,L,H)表示。
2参心大地坐标转换为参心空间直角坐标:
公式中,N为椭球面卯酉圈的曲率半径,e为椭球的第一偏心率,a、b椭球的长短半径,f椭球扁率,W为第一辅助系数
3参心空间直角坐标转换参心大地坐标
二高斯投影及高斯直角坐标系
1、高斯投影概述高斯-克吕格投影的条件:1.是正形投影;2.中央子午线不变形
高斯投影的性质:1.投影后角度不变;2.长度比与点位有关,与方向无关;3.离中央子午线越远变形越大为控制投影后的长度变形,采用分带投影的方法。
常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。
2、高斯投影正算公式:
3、高斯投影反算公式:
4。
笛卡尔三维坐标公式

笛卡尔三维坐标公式笛卡尔三维坐标公式是描述三维空间中点的位置的数学表达式。
它由三个坐标轴:x轴、y轴和z轴组成,分别表示点在水平方向、垂直方向和垂直于水平和垂直方向的方向上的位置。
在笛卡尔三维坐标系中,每个坐标轴上的单位长度是相等的,且坐标轴之间相互垂直。
点的位置可以通过三个坐标值(x, y, z)来表示,分别表示点在x轴、y轴和z轴上的投影距离。
在数学中,笛卡尔三维坐标公式可以表示为:P = (x, y, z)其中P表示一个点在三维空间中的位置,(x, y, z)分别表示点在x轴、y轴和z轴上的坐标值。
笛卡尔三维坐标公式的应用非常广泛。
在几何学中,我们可以通过该公式描述和计算三维图形的位置和形状。
在物理学中,该公式可以用于描述物体在空间中的位置和运动。
在计算机图形学和计算机辅助设计领域,该公式常用于描述三维模型的位置和变换。
通过笛卡尔三维坐标公式,我们可以计算出两点之间的距离和角度。
例如,给定两个点P1(x1, y1, z1)和P2(x2, y2, z2),可以使用勾股定理计算它们之间的距离d:d = sqrt((x2 - x1)^2 + (y2 - y1)^2 + (z2 - z1)^2)其中sqrt表示平方根。
通过这个公式,我们可以计算出任意两点之间的距离。
除了距离,笛卡尔三维坐标公式还可以用于计算两个向量之间的夹角。
例如,给定两个向量A(x1, y1, z1)和B(x2, y2, z2),可以使用向量的点积和模长计算它们之间的夹角θ:cosθ = (A·B) / (|A|·|B|)其中A·B表示向量A和B的点积,|A|和|B|分别表示向量A和B的模长。
通过这个公式,我们可以计算出任意两个向量之间的夹角。
总结:笛卡尔三维坐标公式是描述三维空间中点的位置的数学表达式。
它由三个坐标轴:x轴、y轴和z轴组成,通过三个坐标值(x, y, z)来表示点在三维空间中的位置。
(整理)坐标转换之计算公式
坐标转换之计算公式一、参心大地坐标与参心空间直角坐标转换1名词解释:A :参心空间直角坐标系: a) 以参心0为坐标原点;b) Z 轴与参考椭球的短轴(旋转轴)相重合; c) X 轴与起始子午面和赤道的交线重合;d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ; e) 地面点P 的点位用(X ,Y ,Z )表示; B :参心大地坐标系:a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合; b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ; c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ; d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ; e) 地面点的点位用(B ,L ,H )表示。
2 参心大地坐标转换为参心空间直角坐标:⎪⎭⎪⎬⎫+-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2 公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数ab a e 22-=或 ff e 1*2-= Wa N B W e =-=22sin *1(3 参心空间直角坐标转换参心大地坐标[]NBY X H He N Y X H N Z B X YL -+=+-++==cos ))1(**)()(*arctan()arctan(22222二 高斯投影及高斯直角坐标系1、高斯投影概述高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关; 3. 离中央子午线越远变形越大为控制投影后的长度变形,采用分带投影的方法。
常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。
3维坐标转换参数直接计算的严密公式

3维坐标转换参数直接计算的严密公式假设有两个坐标系A和B,坐标系A中的一个点点A可以用一个齐次坐标表示为:A=[xA,yA,zA,1]T坐标系B中的点B可以用齐次坐标表示为:B=[xB,yB,zB,1]T我们要求解的转换参数为一个4x4的齐次变换矩阵MAB,表示A坐标系到B坐标系的转换。
MAB可以表示为:MAB=[RAB,tAB;0,0,0,1]其中,RAB是一个3x3的旋转矩阵,tAB是一个3维平移向量。
我们需要求解RAB和tAB。
设有一组已知的N个对应点对(Ai,Bi),其中i=1,2,...,N。
我们需要求解最优的转换参数MAB,使得所有点对的误差最小。
首先,我们定义点Ai经过转换矩阵MAB变换后得到的坐标Bi'为:Bi'=MAB*Ai将齐次坐标Bi'展开得到:Bi'=[RAB,tAB;0,0,0,1]*[xA,yA,zA,1]T=[RAB*[xA,yA,zA]T+tAB;1]我们可以将转换后的坐标Bi'与对应的真实坐标Bi做差,得到一个误差向量ei:ei = Bi - Bi'假设所有的点对误差向量ei都服从零均值的高斯分布,我们可以用最小二乘法来求解最优的转换参数MAB。
将所有点对误差向量ei组成一个列向量e,同时将所有点对的A坐标Ai展开得到列向量A,表示为:e=[e1;e2;...;eN]A=[A1A2...AN]我们的目标是求解MAB,使得误差向量e的平方和最小,可以表示为一个最小化问题:min ,e,^2 = eT * e通过将误差向量e表示为矩阵形式,即e=B-A*MAB,其中B表示所有点对的B坐标的列向量。
利用最小二乘法的标准公式可以得到最小二乘解MAB_hat:MAB_hat = (AT * A)^-1 * AT * B最终,通过解算得到的最小二乘解MAB_hat可以近似地代表转换参数MAB。
需要注意的是,在实际应用中,为了提高计算的稳定性和精度,可能需要对数据进行预处理和后处理,如去除异常点,进行数据归一化等。
三维空间旋转变换公式

三维空间旋转变换公式
摘要:
1.三维空间的基本概念
2.三维空间旋转变换公式的定义
3.三维空间旋转变换公式的应用
4.结论
正文:
一、三维空间的基本概念
三维空间是指由三个相互垂直的维度组成的空间,通常用x、y、z 表示。
在三维空间中,每个点都具有三个坐标值,即x 坐标、y 坐标和z 坐标。
三维空间是数学、物理、工程等领域中常见的概念,它在很多实际问题中都有重要的应用。
二、三维空间旋转变换公式的定义
三维空间旋转变换是指将一个点在三维空间中的位置,通过旋转变换到另一个位置。
旋转变换可以通过一个旋转矩阵来描述,这个矩阵通常是一个3x3 的矩阵。
设一个点P(x, y, z) 在一个旋转矩阵A 的作用下,变成了点P"(x", y", z"),那么我们可以用以下的公式来表示这个变换:
P" = A * P
其中,A 表示旋转矩阵,P 表示原点,P"表示变换后的点。
三、三维空间旋转变换公式的应用
三维空间旋转变换公式在实际应用中有很多重要的作用,例如在计算机图
形学中,我们可以用这个公式来实现三维图形的旋转;在物理学中,我们可以用这个公式来描述物体在三维空间中的运动等。
四、结论
三维空间旋转变换公式是一个非常重要的公式,它在很多领域中都有广泛的应用。
坐标经纬度转换公式

坐标经纬度转换公式在我们的日常生活中,经纬度是个挺神奇的东西,它能准确地告诉我们自己所处的位置。
那怎么在不同的坐标系统中进行经纬度的转换呢?这就涉及到一些有趣的公式啦。
先来说说经纬度是啥。
想象一下地球就像一个大大的橙子,我们把它横着切一圈一圈的,这一圈圈就叫纬线。
赤道就是最粗的那一圈纬线,是 0 度纬线。
越往两极,纬线的圈就越小。
而经线呢,就像是从橙子的头顶到屁股竖着切下去的线,连接南北两极,其中通过英国格林尼治天文台的那条经线被定为 0 度经线。
有一次我出去旅游,到了一个风景特别美的地方。
我拿着手机想定位分享给朋友,结果发现手机上显示的坐标和我在地图上看到的不太一样。
这时候我就想到了经纬度转换的重要性。
那坐标经纬度转换的公式到底是啥呢?咱们常用的有好几种方法。
比如说墨卡托投影转换,这个方法就像是把地球这个橙子“压扁”,然后在平面上表示出来。
还有一种叫高斯-克吕格投影转换。
这个就有点复杂啦,它要把地球分成好多小块,然后分别进行转换。
就好像我们切蛋糕,把一块大蛋糕切成小块,再分别处理。
咱们来具体说一说墨卡托投影转换的公式。
假设要把地理坐标(纬度φ,经度λ)转换为墨卡托投影坐标(x,y),公式是这样的:x = λ * R ,y = R * ln(tan(π/4 + φ/2)) 。
这里的 R 是地球的半径。
再说说高斯-克吕格投影转换,它的公式就更复杂一些。
不过别担心,咱们只要知道有这样的工具和方法能帮我们转换就行。
在实际应用中,比如说航海、导航、地图制作等等,准确的经纬度转换可是非常重要的。
要是转换错了,那可能就会迷路,找不到正确的方向。
总之,坐标经纬度转换公式虽然看起来有点复杂,但只要我们掌握了基本原理,就能更好地理解和运用它们。
下次当你再看到那些坐标数字的时候,就不会觉得头疼啦,说不定还能自己动手算一算呢!就像我那次旅游,虽然一开始因为坐标的问题有点小困惑,但后来弄明白了经纬度转换,感觉自己又学到了新本领,让旅行也变得更有意义了。
坐标转换三参数计算器使用说明
坐标转换三参数计算器使用说明坐标转换三参数计算器使用说明4.0升级及使用说明:1、增加了批量处理数据功能。
2、经纬度数据与直角坐标数据可混合输入(经纬度格式:DDD.MMSS,109度04分08.94343秒表示为109.040894343,直角坐标格式单位为米,如X为1234567.89,Y为123456.78,Y 坐标无带号)。
3、批量处理数据文件为文本文件,格式为严格每行4个数据,以逗号或空格分开。
点号1,X坐标(或为纬度),Y坐标(或为经度),高程4、输出文件为文本文件,格式为:点号1,转换前的X坐标(或为纬度),Y坐标(或为经度),高程转换后的X坐标(或为纬度),Y坐标(或为经度),高程5、未注册软件无批量处理功能,部分参数隐形显示,但内部坐标转换仍可正常进行。
工作界面:===========================================3.0使用说明本软件分成上下二部分,上半部为在两个不同椭球体间求坐标转换的三参数,下半部为在两个不同椭球体间的坐标转换。
在两个不同椭球体间进行坐标转换首先必需知道坐标转换参数,通常有三参数和七参数转换二种方式,本程序提供三参数转换方式。
例1:我要求手持GPS的北京54(或西安80)坐标转换参数。
向有关部门收集所在工作区内已知点(只要一个控制点)的WGS84坐标系中的经度、纬度、高程,以及同点的北京54(或西安80)坐标系中的直角坐标,即可进行本软件操作了。
如某一个控制点的WGS84经度、纬度、高程为:109度34分28.94343秒, 31度02分25.65526秒, 104.967米该控制点北京54坐标为:x=3436391.566m,y=37363926.964m,h=108.717m 将上述数据输入在软件上半部相应栏中,注意勾选前后坐标系正确(坐标系A,坐标系B),输入中央经线(本坐标是37带,输111),点击参数计算,计算结果如下:DA=-108,DF=0.00000048,dx=32.284979,dy=-90.792978,dz=-57.993043, 输入手持GPS即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
德 里 格矩 阵 _6一
由公 共 点 1,2可 列 两组 6个 方 程 ,用 点 2方程 减 去
点 1方 程 ,消 去平移 参数 ,并 把式 (7c)代人
科技论坛:www.tech-domain.com
科技论坛 维普资讯
2006年 第 5期
一
S 3
S 4
一 W 2 一 一
2
aXS2l—Xr21_【
— — W 2 S
0 S S /t2
3
U 3
0
Ys21一 Yr21 I
AZ I . 一 S31 一 Z7 T31 J
(10)
中 ,“2=AXs2l+ X 2l, 2= Ys21+ Y 2l,W 2=
。 3
1.反 对称 矩阵 和 罗德 里格 矩阵性 质
= arcsinb 3
1.S =一JS,R =(J+S)(J—S)一
(7a)
但在 任 意条件 下 ,3个 角取 值 范 围是 0o~360 ̄,具 体
2.(J—S) =J+S,(J+S) =,一S (7b)
大小 无法 判 断 ,由式 (3)才 能判 断 出具体 大小 。实际
1.物理 意 义 如 图 l所示 ,在 两 坐标 系统下 有 4个公 共 点 ,在 不 同坐标 系统 内 ,看 成 四面 的 刚 体 ,如 图 l(a),(b) 坐 标转 换 的物理 意 义就 是通 过平 移 、旋 转 和缩 放 ,使 两个 刚 体大 小 和形 状 完 全相 同 。具 体过 程 是 ,设 公
一 、 引 言
3维 直 角 坐标 转 换 中 ,采 用 7参 数 Bursa.Wolf 模 型 、Molodenskv模 型 和 武 测 模 型 1,当在 两 坐 标 系统 下有 3个 公共 点 ,就 可惟 一 解 算 出 7个 转 换 参 数 ;多余 3个 公共 点 时 ,就要 进 行 平 差 计 算 ,转 换 参 数 的初值 (特 别是 旋 转 角 )的 大小 ,直接 影 响平 差 系 统稳 定性 和计 算 速 度 ,有 时使 得 解 算 的参 数 均 严 重
直 接 计 算 转 换 参 数 的 严 密 公 式 ,在 此 基 础 上 推 导 出严 密 的线 性 化 公 式 由 于 不 用 进 行 三 角 函 数 计 算 ,只 用 简 单 加 减 乘 除 ,也 不 用 迭 代计 算 ,所 以 该 模 型 计 算 速 度快
tech-domain 关键词 :3维坐标转换;转换参数;转换矩阵;反对称矩阵;罗德里格矩阵
式 (2)的线 性化可 得
dX
dX s
C1 d Y + C2 d Ys +C3dH — W =0 (16)
一 U 3 2
(5)
2a ——2bc
1— 02一b2 4-c2/
(6)
其 中 △ =1+a +b +C 。本 文 就是 以 反对 称 矩 阵
和罗德 里格 矩 阵性质 建立 直接 计算 的公 式 。
三 、3点法计算转换参数公式
在 已知两 坐标 系统 下 3个 公共 点计 算 7个参 数 的方 法称 为 3点法 ,其计 算过 程如 下 。
坛 定 ,是 刚体 对应 边 长 比的平 均值 ,平 移参数 只有在旋 转 矩 阵 确定后 方 能确定 ,所 以旋 转 矩 阵 的确 定是
参 数 直接解 算 的核 心 。 由式 (4)可 知 ,3个 角 度 参 数
论 用 下式 计算 技 0= 一a rc【an 02
,
一
科 a3 . ‘ [an
一 2Zs21一 Zr21
0
),Xs21+ XT21 I·
Ys21+ Yr21 ),Xs21+ X r21
0
J
4一 X 1 Yr4一 Y l Z r4一 Zrl
解 出旋转 矩 阵后 ,由式 (7d)计 算 得 到 反 对 称 矩 阵或
其 3元素 公式
S=2(,+R )~ 一,
R= r●● ●一●△●L
『 I c。s c。s -Sin sin c。sd,sin + n sin sin 一+s in ?。s≯]
L — c。s sin
c。s c。s
sin l
sin ̄cos0 cosd,sin ̄sinO sind,sinO—cos ̄,sin ̄cos0 co一 s ̄c一 os ̄+ J
尺 度 参数 和转 换 矩 阵 ,3个旋 转 参 数 隐藏 在 转 换 矩
阵 中 。选择 7个 参数 是 AX,A y,△z, ,0, , 时 ,
旋 转角 度无 法 判 断 和 计 算 ,若 选 择 日 =[AX,AY,
AZ, ,a,b,C 为 参 数 ,就 可 计 算 ,并 且 简 单 。对
, ̄Zs21+ Zr21.It3 AX s31+ X r31. 3 Ys31+ Yr31
实用 中 ,两坐标 系 中有 多 于 3个 公共 点 ,以发 现
tech-domain 错误和提高精度 。在 多余观测条件下 ,根据最小二
乘 原理解 算 参数 。坐 标转 换 目的是 解 算 平 移 参 数 、
科技论坛:www.tech-domain.com
科技论坛 维普资讯
2006年 第 5期
测 绘 通 报
文章编 号 :0494.091l(2006)05.0007.04
中图分 类号 :P226 .3
7 文献 标 识码 :B
3维坐 标转换 参数直接计算的严密公式
9
Xs2一 s1
2一 X rl
Ys2—— Ysl Zs2一 Zs1
(I+ S) Ys2一 ys1 = (I— S) YT2一 Y 1
Ys3一 】,s1 Zs3一 Zs1 =
Zs2一 Zs1
Z 2一 Zrl
Xs21
21
或 (I+S) Ys21 = (I— S) YT21
)_。一J 其 中 ,J是 3阶单 位 阵 。
(7d)
元 素 中 只有 3个 是 独 立 的 。又 设 反 对 称 矩 阵 S=
2.转换 参 数直接 解 算
『0 一c —b]
l c 0 一。1,其元素是独立的。R由S构成罗 l6 。 0 J
通 过 上述 可 知 ,转 换 参 数 的确 定 关键 是 旋 转 矩 阵的确 定 ,以下 是根 据 反 对 称 矩 阵 和 罗德 里格 的性 质 ,由 3个 点计 算 转换 参 数 的公 式 推 导 。 由式 (2),
一 ) A
习惯上 称 AX,A Y,△z, ,0, , 为 7参 数 ,后 3个
称 为旋 转参 数 或角 度参 数 。 3.模 型参 数确 定 的分析
— — 2C——2ab 1一 a2 b 一 C2
(4)
一 2b 4-2nc 1 I
— — 2a —.2bc l
由数学 建模 过程 可 以得 出 ,尺 度 因子 最好 确
共 点 l为参 考 点 ,将 图 l(b)坐 标 轴 和 刚 体 平 移 ,与
对 应 的 图 l(a)刚 体 的 点 l重 合 ,如 图 l(e),平 移 量
为 [“
] ;然 后 以点 l为顶 点 ,绕 3轴 旋 转 ,
使 两坐 标 系统 的坐 标 轴 平 行 ,以参 考 点 为顶 点 的 边
S)表 示 原 坐 标 系 统 下 坐 标 ;[AX AY △z] =
R3=l 0 1 0 I i 0 。 J
tech-domain R[X Y Z ] 为平移 因子 ,其 意义是参考点 所 以 旋转 后 的坐标 ; 为 尺 度 因 子 ;R 为 坐 标 转 换 旋 转
System,简 称 MMS)技术 的成 熟 和应用 ,对运 动 载体
(飞 机 、轮 船 、汽 车等 )姿 态 的测 量 (GPS+INS)也 越
来越 多 [ ,任 意 角度 的 3维 坐 标 转换 计 算 也 越 来
论 越 多 。在平 台上 安装 3台或 4台 GPS接 收机 ,来 确
3.R I1=R一 =(J+S) (J—S)
(7c)
应用 中 ,只要 解 出转 换 矩 阵 就 能 达 到 坐 标转 换 的 目
的 『al a2 a37
。 设 =l bl b2 b3 l是一个正交矩阵,其9个 J c。 c2 c
1
4.(J+S)一0={ (J+ ~0),S =2(J+
0
图 1
收 稿 日期 :2005.07.04 作 者 简 介 :姚 吉 利 (1964.),男 .陕 西 蒲城 人 ,副 教授 .主要 从事 摄 影 测 量 与遥 感 数 据 处 理 研 究 。
科技论坛:www.tech-domain.com
科技论坛 维普资讯
出 3维 坐标 转换 7参 数 直接 计 算 的模 型 ,以旋 转 矩
阵 的确定 为 核心 ,导 出 了 3点 法 和 4点 法 (两坐标 系
统 下公共 点 数 ),用反 对称 矩 阵和 罗德 里格 矩 阵性 质
推 出 的公 式 严密 ,该 模 型计 算 速度 快 。
二 、3维 坐 标 转 换 的物 理 意 义 和 数 学 模 型
(8)
Ys4一 】,s1 ZS4——ZS1
X 2一 X l Yr2一 Y l Zr2一 Zrl
1
_ _ _ —
—
X 3一 X rl
Yr3一 Y l ZT3一 Zrl
(14)
Zs21
Z 21
展 开整 理后 得
0
一,a,Zs2l—Z 21 一 Ys21一 l,r21]
重 合 ,其他 各边 平 行 ,两 刚 体是 相 似 体 ,只是 大 小 不