发那科参数大全
发那科参数大全

发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC 信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1. SETTING 参数(与设定相关的参数)参数号符号意义 16-T 16-M0000/0 TVC 代码竖向校验 O:不进行 1:进行0000/1 ISO EIA/ISO代码 O:EIA代码 1:ISO代码0000/2 INI MDI方式公/英制 O:米制 1:英制0000/5 SEQ 自动加顺序号 O:不进行 1:进行0002/0 RDG 远程诊断 O不进行 1进行0002/7 SJZ 手动参考位置返回 0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定 0关闭 1开启0012/4 AIC 轴命令的移动距离 0依照指定的地址 1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定 0不拆除受控轴 1拆除受控轴3216 自动加程序段号时程序段号的间隔 O 12.RS232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1 RS-232-C串行端口1 2 RS-232-C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口 10 DNC1/DNC2接口,OSI因特网 12 DNC1接口#20021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
发那科参数(详细)
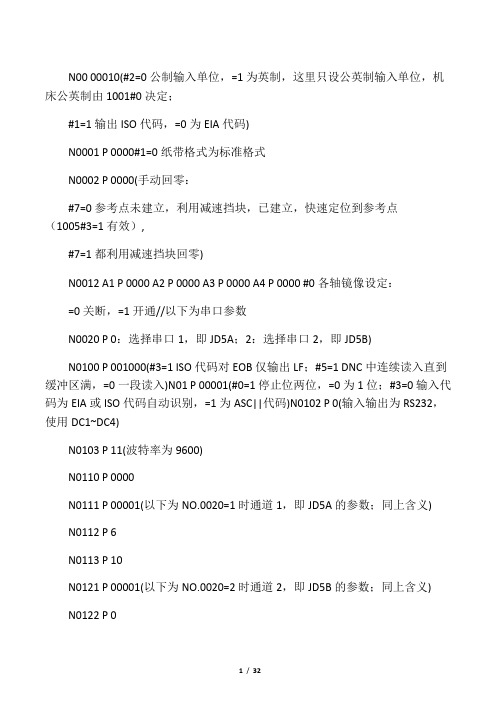
N00 00010(#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 0000#1=0纸带格式为标准格式N0002 P 0000(手动回零:#7=0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 0000 A2 P 0000 A3 P 0000 A4 P 0000 #0各轴镜像设定:=0关断,=1开通//以下为串口参数N0020 P 0:选择串口1,即JD5A;2:选择串口2,即JD5B)N0100 P 001000(#3=1 ISO代码对EOB仅输出LF;#5=1 DNC中连续读入直到缓冲区满,=0一段读入)N01 P 00001(#0=1停止位两位,=0为1位;#3=0输入代码为EIA或ISO代码自动识别,=1为ASC||代码)N0102 P 0(输入输出为RS232,使用DC1~DC4)N0103 P 11(波特率为9600)N0110 P 0000N0111 P 00001(以下为NO.0020=1时通道1,即JD5A的参数;同上含义) N0112 P 6N0113 P 10N0121 P 00001(以下为NO.0020=2时通道2,即JD5B的参数;同上含义) N0122 P 0N0123 P 10N0960 P 0000//以下为轴控制和设定单位参数N1001 P 0000(#0=0公制机床,=1英制机床)N1002 P 001001(#0=1手动同时控制轴数3轴;#2=0不使用参考点偏移功能;#3=1未回零运行G28:P/SNO.090报警;#1=1无挡块回零全轴有效,与1005#1无关)N1004 P 0000(#7,#1=0,最小设定和移动单位为1um或0.001deg,是-B)N1005 A1 P 001100 A2 P 001100 A3 P 001100 A4 P 001100 (#4,#5=1各轴正负方向外部减速信号对快进和工进都有效;未建立参考点自动运行#0=0,报警P/S224,#0=1,不报警,即是说不回零也可自动运行;#1=0无挡块回零无效,1002#1为0该参数设定有效)N1006 A1 P 001000 A2 P 0000 A3 P 0000 A4 P 00001(A4,#0=1旋转轴A型,#5=0回零都为正方向)N1008 A1 P 0000 A2 P 0000 A3 P 0000 A4 P 0001(#0=1启动旋转轴循环功能;#2=1相对坐标每转移动量取整)绝对指令旋转方向#1=0,按距目标较近的方向,#=1,按指令符号方向。
发那科参数大全

发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC 信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF1:ON1.SETTING 参数(与设定相关的参数)参数号符号意义16-T16-M0000/0TVC代码竖向校验O:不进行1:进行0000/1ISO EIA/ISO代码O:EIA代码1:ISO代码0000/2INI MDI方式公/英制O:米制1:英制0000/5SEQ自动加顺序号O:不进行1:进行0002/0RDG远程诊断O不进行1进行0002/7SJZ手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0MIRx各轴镜像的设定0关闭1开启0012/4AIC轴命令的移动距离0依照指定的地址1总为增量命令0012/7RMVx 各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴3216自动加程序段号时程序段号的间隔O 12.RS232C口参数0020此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1RS-232-C 串行端口1 2 RS-232-C串行接口23遥控缓冲器接口4存储卡接口5数据服务器接口10 DNC1/DNC2接口,OSI因特网12DNC1接口#20021前台输入设备的设定0022后台输入设备的设定0023后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
)100/3NCR程序段结束的输出码O 1100/5ND3DNC运行时:读一段/读至缓冲器满O 13.与存储卡接口相关的参数0300/0PCM存储卡接口0:NC端接口1:电脑端接口4.与FACTOLINK相关的参数(与面板操作相关的参数)0801/0SB2停止位的个数0:一位1:2位0810/0BGS对FACTOLINK报警任务通信,没有显示FACTOLINK屏幕时0:不启动1:启动0810/1FAS FACTOLINK使用了ANSWER 、ANSWEEx命令后,在回答栏是否进行回答编号“Z01”的显示。
发那科参数(详细)
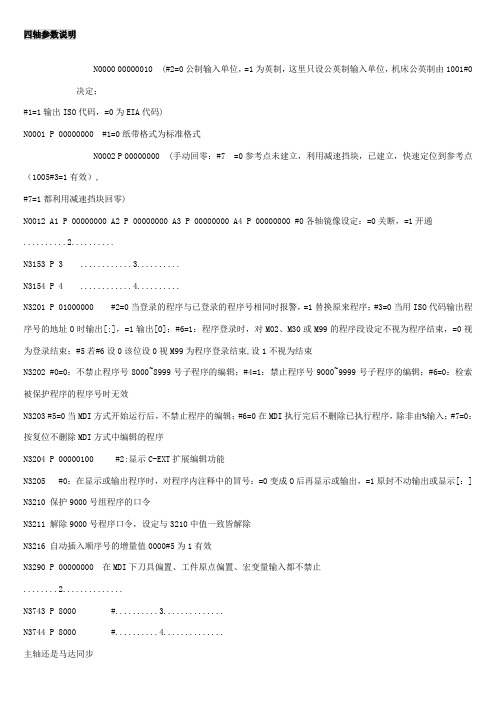
四轴参数说明N0000 00000010 (#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 00000000 #1=0纸带格式为标准格式N0002 P 00000000 (手动回零:#7 =0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000000 #0各轴镜像设定:=0关断,=1开通..........2..........N3153 P 3 ............3..........N3154 P 4 ............4..........N3201 P 01000000 #2=0当登录的程序与已登录的程序号相同时报警,=1替换原来程序;#3=0当用ISO代码输出程序号的地址O时输出[:],=1输出[O];#6=1:程序登录时,对M02、M30或M99的程序段设定不视为程序结束,=0视为登录结束;#5若#6设0该位设0视M99为程序登录结束,设1不视为结束N3202 #0=0:不禁止程序号8000~8999号子程序的编辑;#4=1:禁止程序号9000~9999号子程序的编辑;#6=0:检索被保护程序的程序号时无效N3203 #5=0当MDI方式开始运行后,不禁止程序的编辑;#6=0在MDI执行完后不删除已执行程序,除非由%输入;#7=0:按复位不删除MDI方式中编辑的程序N3204 P 00000100 #2:显示C-EXT扩展编辑功能N3205 #0:在显示或输出程序时,对程序内注释中的冒号:=0变成O后再显示或输出,=1原封不动输出或显示[:] N3210 保护9000号组程序的口令N3211 解除9000号程序口令,设定与3210中值一致皆解除N3216 自动插入顺序号的增量值0000#5为1有效N3290 P 00000000 在MDI下刀具偏置、工件原点偏置、宏变量输入都不禁止........2..............N3743 P 8000 #..........3..............N3744 P 8000 #..........4..............N4099 A1 P 0 #默认N4100 A1 P 760 根据马达型号N4101 A1 P 100 根据马达型号N4102 A1 P 1134 根据马达型号N4103 A1 P 1134 根据马达型号N4104 A1 P 2000 根据马达型号N4105 A1 P 2000 根据马达型号N4106 A1 P 1500 根据马达型号N4107 A1 P 1500 根据马达型号N4108 A1 P 500 根据马达型号N4109 A1 P 10 根据马达型号N4110 A1 P 984 根据马达型号N4111 A1 P 28 根据马达型号N4112 A1 P 533 根据马达型号N4113 A1 P 140 根据马达型号N4114 A1 P 12 根据马达型号N4115 A1 P 7 根据马达型号N4116 A1 P 100 根据马达型号N4117 A1 P 20 根据马达型号N4118 A1 P 30 根据马达型号N4119 A1 P 0 默认N4120 A1 P 40 根据马达型号N4121 A1 P 5 默认N4122 A1 P 0 默认N4123 A1 P 30 默认N4124 A1 P 0 默认N4125 A1 P 0 默认100,自动操作定时器设置N4126 A1 P 0 默认1000,自动操作速度指令N4127 A1 P 144 根据马达信号N4129 A1 P 0 根据马达信号N4130 A1 P 0 根据马达信号N4131 A1 P 0 默认N4132 A1 P 0 默认N4133 A1 P 114 #主轴电机代码N4135 A1 P 0 默认N4136 A1 P 0 #低速时正常旋转马达电压 (若为0与4083相同)N4166 A1 P 0 #低速时再生能源极限(若为0与4080相同)N4136~N4174 都是默认或根据马达型号决定N4191 A1 P 00000111N4312 A1 P 0 #位置编码器方式定向接近结束时检测电平N4176~N4351 为第二主轴,略// 有关刀补参数N5001 #0选择刀具长度补偿类型:=0由#1决定类型A或B,=1为类型C;#1=0类型A,即与平面无关,通常为Z轴,=1与指定平面G17、18、19垂直的轴;#2=0刀具长度补偿用H代码,刀长半径补偿C用D代码,刀长位置偏置由#5决定,=1都由H代码指定(刀具半径补偿B时设1);#5刀具位置偏置G45~48的偏置号地址:=0用D代码指定,=1用H代码指令N5003 #6=0利用复位取消刀具长度补偿的补偿量,=1不取消N5004 #2刀具半径补偿量:=0由半径值设定,=1由直径值设定N5008 P 00000101 #0=1:不进行刀具半径C的干涉检查,=0进行;#1=0在上述干涉检查中,编程移动方向和偏置移动方向相差90~270度时报警;#2=1刀具半径补偿C中拐角圆弧功能G39有效// 有关固定循环参数N5101 #0使用钻削固定循环的钻孔轴:=0通常位Z轴,=1由程序选择轴;#1=0 G81指定为钻孔用固定循环;#4、5设定钻孔固定循环G76、87退刀轴及方向(见书);#6=0攻丝循环G84、74中,主轴回转换向时,在输出M03或M04之前输出M05,=1不输出M05;#7=0在G76、87中,主轴定位之前输出M05,=1不输出N5103 #1在G73中,不用Q指定每次切入量时或指令Q0时:=0不报警,=1报警N5114 P 1000 高速深孔循环G73的退刀量 1mmN5115 P 1000 固定循环G83的留空量 1mm// 有关刚性攻丝参数(很多参数不准)轮比:=0不用任意齿轮比(3706上设定齿轮比),=1用任意齿轮比(5224、5231~5234设定);#2=0用刚性解除指令G80、01组G码或复位等解除刚性状态要等刚性攻丝信号RGTAP变为0才可;#5=0刚性攻丝为高速深孔攻丝循环,=1一般刚性攻丝N5201 P 00000001 #0=1进行刚性攻丝的平滑处理;#2=0刚性攻丝中切削时间常数进刀退刀使用同样参数5261~5264,=1不同样,进刀5261~5264,退刀5271~5274N5202 P 00000001 #0=1刚性攻丝开始,主轴进行准停;N5204 P 00000000 #0=0诊断画面455~457显示刚性攻丝同步误差,=1显示主轴和攻丝轴误差量的差452、453N5210 P 29 刚性攻丝方式指令的M代码N5211 P 10 刚性攻丝退刀时的倍率值5200#4=1有效5200#3=1,设定单位为10%N5214 P 10000 深孔攻丝循环时回退量和留空量 10mmN5221 P 10 主轴侧齿轮齿数1档N5222 P 10 主轴侧齿轮齿数2档N5223 P 10 主轴侧齿轮齿数3档N5231 P 10 编码器侧齿轮齿数1档N5232 P 10 编码器侧齿轮齿数2档N5233 P 10 编码器侧齿轮齿数3档N5241 P 3000 刚性攻丝主轴最高转速1档N5242 P 3000 刚性攻丝主轴最高转速2档N5243 P 3000 刚性攻丝主轴最高转速3档N5261 P 1000 主轴和攻丝轴直线加减速时间常数1档N5262 P 1000 主轴和攻丝轴直线加减速时间常数2档N5263 P 1000 主轴和攻丝轴直线加减速时间常数3档N5271 P 1000 退刀时主轴和攻丝轴直线加减速时间常数1档N5272 P 1000 退刀时主轴和攻丝轴直线加减速时间常数2档N5273 P 1000 退刀时主轴和攻丝轴直线加减速时间常数3档N5280 P 3000 刚性攻丝时主轴和攻丝轴控制回路增益(各齿轮通用)N5281 P 3000 刚性攻丝时主轴和攻丝轴控制回路增益(1档)N5282 P 3000 刚性攻丝时主轴和攻丝轴控制回路增益(2档)N5283 P 3000 刚性攻丝时主轴和攻丝轴控制回路增益(3档)N5292 P 0 刚性攻丝时主轴控制回路增益(2档)N5293 P 0 刚性攻丝时主轴控制回路增益(3档)N5300 P 20 刚性攻丝时攻丝轴到位宽度N5301 P 20 刚性攻丝时主轴到位宽度N5310 P 10000 刚性攻丝时攻丝轴移动位置偏差量的极限值N5311 P 10000 刚性攻丝时主轴移动位置偏差量的极限值N5312 P 500 刚性攻丝时攻丝轴停止时位置偏差量的极限值N5313 P 550 刚性攻丝时主轴停止时位置偏差量的极限值// 有关缩放/坐标旋转的参数N5400 P #0坐标旋转的旋转角度指令R:=0用绝对坐标指令,=1用G90/G91指令;#6=1各轴缩放镜像有效P指令缩放倍率;#7=1缩放倍率单位单位N5401 A1 P 00000001 A2 P 00000001 A3 P 00000001 A4 P 0000001 #0=1分别指定各轴缩放有效N5410 P 0 坐标旋转中程序无旋转角度指令时使用的旋转角度N5411 P 1000 程序无缩放倍率指令时使用的倍率1倍N5421 A1 P 9 A2 P 9 A3 P 9 A4 P 9 各轴缩放倍率9倍// 有关分度工作台分度的参数N5500 P 00000000N5511 P 0N5512 P 0// 有关用户宏程序参数N6000 #0在非G66(宏调用)中指令G67(取消宏调用)指令:=0报警,=1无视;#5=0宏程式中不使用单程序段停止N6001 #3用户宏程序公共变量输出:=0输出#500号组公共变量,=1输出#100和#500号组公共变量;#5用T代码:0不可调用宏程序(子程序),1可以;#6按复位后,宏公共变量#100~#199:=0清空,=1不清除;#7宏局部变量#1~33按复位后:=0清空,=1不清除N6003 宏程序中断有关参数(见书)N6004 #0=0,ATAN结果0~360度,ASIN结果270~90度,=1ATAN-180~180度,ASIN-90~90度N6030 调用外部文件M代码,默认M198N6033 使用户宏程序中断有效的M代码,默认M96N6034 使用户宏程序中断无效的M代码,默认M97N6071 P 0 HC6350无9001宏程序N6071~6079 调用程序号9001~9009子程序的M代码N6080~6089 调用程序号9020~9029用户宏程序的M代码// 有关运转时间、零件数显示的参数//有关刀具寿命管理的参数N6800 #7与M06同一程序段的T代码:=0视为上一把刀具的刀具号,=1视为下一把刀具的刀具号// 有关手动/自动运行的参数N7001 #0手动介入,返回功能:=0无效,=1有效// 有关手轮进给\中断的参数N7102 #0各轴移动方向与手轮回转方向:=0相同,=1相反N7110 P 3 设定使用手轮台数N7113 P 50 手动控制进给倍率m 如手轮*50档N7114 P 100 手动控制进给倍率n 如手轮*100档N7117 P 1 手轮进给容许滑移量// 有关软操作面板参数N7200 使能软操作面板有关参数N7220 P 72 软操作面板通用开关名称N7221 P 78N7222 P 68N7223 P 76N7224 P 32N7225 P 73N7226 P 78N7227 P 84N7228 P 68N7229 P 79N7230 P 79N7231 P 82N7232 P 32N7234 P 66N7235 P 75N7236 P 80N7237 P 79N7238 P 87N7239 P 69N7240 P 82N7241 P 79N7242 P 70N7243 P 70N7276 P 82N7277 P 83N7278 P 84N7279 P 32N7280 P 77N7281 P 65N7282 P 71N7283 P 32// 有关程序再开始、加工返回再开始的参数N7300 #6当程序再开始时检索出要再加工的程序后,移动到再开始加工的位置前输出代码:=0输出最后的M、S、T、B代码,=1输出全部M代码和最后S、T、B代码(#7=1有效);#7决定#6:=0不输出M、S、T、B代码,=1输出;N7310 各轴以空运行速度移动到再开始位置的移动顺序,设1先移// 有关PMC轴参数N8001~8028 见书说明// 系统基本功能参数参数N8130 P 4 总控制轴数N8131 P 00000001 #0=1使用手轮进给N8132 P 00110000 #0=0不使用刀具寿命管理;#3=0不使用分度工作台分度;#4=1使用小口径深孔钻削循环;#5=1使用缩放(#4、5不能同时为1)!!现在机床都为1,改之!N8134 P 00000001 #0=1使用图形对话功能N8701 #2由PMC窗口改变的参数,在自动运行中是否有效N8900 P 00000001N8901 #0=0进行风扇电机异常检测,出现过热报警// 有关系统保密参数N9900 P 4N9901 P 0N9920 P 00111011N9921 P 01000110N9922 PN9923 PN9924 P 00111111N9925 P 00100000N9926 P 01100000N9927 P 01010000N9928 PN9929 P 00001111N9930 P 00111111N9931 PN9932 P 01001111N9933 PN9934 P 01010000N9935 PN9936 PN9937 P 00110011N9940 P 00000100N9941 P 00000101N9942 P 00000101N9943 PN9945 P 00010000 N9946 P 00000101 N9952 P 00000101 N9953 PN9962 P 00000100 N9965 P 00000100 N9972 PN9976 P。
发那科常用全参数(精)

发那科系统参数系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI 键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC 信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF1:ON1.SETTING参数(与设定相关的参数)参数号符号意义16T16M0000/0TVC代码竖向校验O:不进行1:进行0000/1ISO EIA/ISO代码O:EIA 代码1:ISO 代码0000/2INI MDI方式公/英制O:米制1:英制0000/5SEQ自动加顺序号O:不进行1:进行0002/0RDG远程诊断O不进行1进行0002/7SJZ手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0MIRx各轴镜像的设定0关闭1开启0012/4AIC轴命令的移动距离0依照指定的地址1总为增量命令0012/7RMVx各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴3216自动加程序段号时程序段号的间隔O 12.RS232C口参数0020此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1RS232C串行端口12RS232C串行接口23遥控缓冲器接口4存储卡接口5数据服务器接口10DNC1/DNC2接口,OSI 因特网12DNC1接口#20021前台输入设备的设定0022后台输入设备的设定0023后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有03。
如果使用了正在使用的输入输出设备,将发生报警P/S233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
)100/3NCR程序段结束的输出码O 1100/5ND3DNC运行时:读一段/读至缓冲器满O 13. 与存储卡接口相关的参数0300/0PCM存储卡接口0:NC 端接口1:电脑端接口4.与FACTOLINK 相关的参数(与面板操作相关的参数)0801/0SB2停止位的个数0:一位1:2位0810/0BGS对FACTOLINK 报警任务通信,没有显示FACTOLINK 屏幕时0:不启动 1:启动0810/1FAS FACTOLINK使用了ANSWER、ANSWEEx 命令后,在回答栏是否进行回答编号“Z01”的显示。
发那科参数(详细)
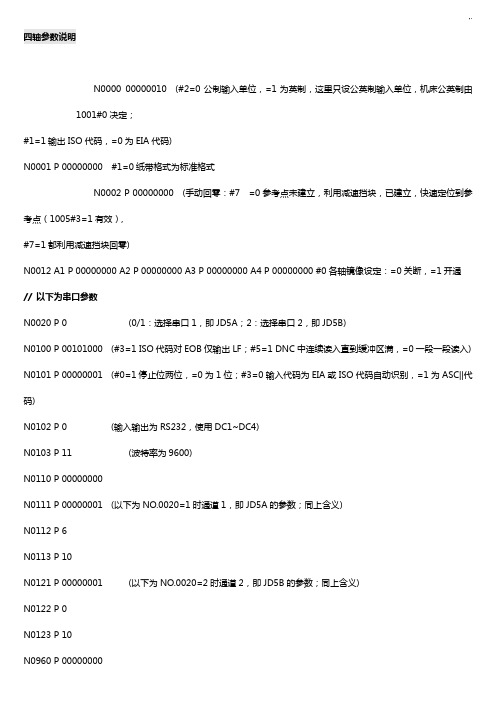
四轴参数说明N0000 00000010 (#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 00000000 #1=0纸带格式为标准格式N0002 P 00000000 (手动回零:#7 =0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000000 #0各轴镜像设定:=0关断,=1开通// 以下为串口参数N0020 P 0 (0/1:选择串口1,即JD5A;2:选择串口2,即JD5B)N0100 P 00101000 (#3=1 ISO代码对EOB仅输出LF;#5=1 DNC中连续读入直到缓冲区满,=0一段一段读入) N0101 P 00000001 (#0=1停止位两位,=0为1位;#3=0输入代码为EIA或ISO代码自动识别,=1为ASC||代码)N0102 P 0 (输入输出为RS232,使用DC1~DC4)N0103 P 11 (波特率为9600)N0110 P 00000000N0111 P 00000001 (以下为NO.0020=1时通道1,即JD5A的参数;同上含义)N0112 P 6N0113 P 10N0121 P 00000001 (以下为NO.0020=2时通道2,即JD5B的参数;同上含义)N0122 P 0N0123 P 10N0960 P 00000000// 以下为轴控制和设定单位参数N1001 P 00000000 (#0=0公制机床,=1英制机床)N1002 P 00001001 (#0=1手动同时控制轴数3轴;#2=0不使用参考点偏移功能;#3=1未回零运行G28:P/SNO.090报警;#1=1无挡块回零全轴有效,与1005#1无关)N1004 P 00000000 (#7,#1=0,最小设定和移动单位为1um或0.001deg,是-B)N1005 A1 P 00110000 A2 P 00110000 A3 P 00110000 A4 P 00110000 (#4,#5=1各轴正负方向外部减速信号对快进和工进都有效;未建立参考点自动运行#0=0,报警P/S224,#0=1,不报警,即是说不回零也可自动运行;#1=0无挡块回零无效,1002#1为0该参数设定有效)N1006 A1 P 00100000 A2 P 00000000 A3 P 00000000 A4 P 00000001 (A4,#0=1旋转轴A型,#5=0回零都为正方向)N1008 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000101 (#0=1启动旋转轴循环功能;#2=1相对坐标每转移动量取整)绝对指令旋转方向#1=0,按距目标较近的方向,#=1,按指令符号方向。
FANUC常用参数
FANUC常用参数1.报警处理参数(ALM)这些参数用于设置系统报警的处理方式,例如报警终止的条件、报警信息的显示等。
2.坐标系参数(G54~G59)这些参数用于设置工件坐标系的原点和轴向移动的距离。
3.速度参数(F、S、G96~G97)这些参数用于设置切削进给速度、切削用途的材料速度等。
4.转速参数(M3、M4、M5)这些参数用于设置主轴的转速和方向。
5.工具偏移参数(G43、G44、G48)这些参数用于设置和调整工具补偿的位置。
6.急停参数(M0、M1)这些参数用于设置急停的条件和执行急停操作。
7.程序调用参数(M98、M99)这些参数用于调用和执行子程序。
8.伺服参数(SV、SET)这些参数用于设置伺服轴的速度和位置。
9.插补误差参数(G96、G97、G98、G99)这些参数用于设置插补误差补偿的方式和值。
10.自动换刀参数(T、M6)这些参数用于自动换刀操作,设置刀具编号和刀具长度补正值。
11.平台控制参数(G160~G169)这些参数用于配置和控制机床上的附加设备,例如自动上下料机等。
12.快速移动参数(G00)这些参数用于设置快速移动的速度和方式。
13.进给速度参数(G94、G95)这些参数用于设置进给速度单位和进给速度值。
14.反向间隙参数(G41、G42)这些参数用于设置反向间隙的值和位置。
15.加工参数(G01、G02、G03)这些参数用于设置不同的加工方式,例如直线插补、圆弧插补等。
以上是一些常用的FANUC参数示例,不同的机床和加工过程可能会有所差异。
在操作FANUC数控系统时,正确设置和调整这些参数是非常重要的,可以确保机床正常运行,并且获得高质量的加工结果。
发那科参数大全

发那科参数大全发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1.SETTING 参数(与设定相关的参数)参数号符号意义16-T 16-M0000/0 TVC 代码竖向校验O:不进行1:进行0000/1 ISO EIA/ISO代码O:EIA代码1:ISO代码0000/2 INI MDI方式公/英制O:米制1:英制0000/5 SEQ 自动加顺序号O:不进行1:进行0002/0 RDG 远程诊断O不进行1进行0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定0关闭1开启0012/4 AIC 轴命令的移动距离0依照指定的地址1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴3216 自动加程序段号时程序段号的间隔O 12.RS232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1 RS-232-C串行端口1 2 RS-232-C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口10 DNC1/DNC2接口,OSI因特网12 DNC1接口#20021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
)100/3 NCR 程序段结束的输出码O 1100/5 ND3 DNC运行时:读一段/读至缓冲器满O 1 3.与存储卡接口相关的参数0300/0 PCM 存储卡接口0:NC端接口1:电脑端接口4.与FACTOLINK相关的参数(与面板操作相关的参数)0801/0 SB2 停止位的个数0:一位1:2位1201/2 ZCL 手动回零点后是否取消局部坐标系O:不取消1:取消1201/3 FPC 在当前位置显示屏幕上通过软键操作设定可变参考位置后0:不预设相对位置显示(相对位置显示不变化)1:相对位置显示预设为零。
发那科参数大全

发那科系统参数总表[1]宇文皓月系统参数不正确也会使系统报警。
另外,工作中经常遇到工作台不克不及回到零点、位置显示值分歧错误或是用MDI键盘不克不及输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1.SETTING 参数(与设定相关的参数)参数号符号意义16-T 16-M0000/0 TVC 代码竖向校验O:不进行1:进行0000/1 ISO EIA/ISO代码O:EIA代码1:ISO代码0000/2 INI MDI方式公/英制O:米制1:英制0000/5 SEQ 自动加顺序号O:不进行1:进行0002/0 RDG 远程诊断O不进行1进行0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定0关闭1开启0012/4 AIC 轴命令的移动距离0依照指定的地址1总为增量命令0012/7 RMVx 各轴的受控轴裁撤设定0不裁撤受控轴1裁撤受控轴3216 自动加程序段号时程序段号的间隔O 12.RS232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1 RS-232-C串行端口1 2 RS-232-C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口10 DNC1/DNC2接口,OSI因特网12 DNC1接口#2 0021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用分歧的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1暗示相同的输入输出设备。
发那科全参数大全

发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1.SETTING 参数(与设定相关的参数)参数号符号意义16-T 16-M0000/0 TVC 代码竖向校验O:不进行1:进行0000/1 ISO EIA/ISO代码O:EIA代码1:ISO代码0000/2 INI MDI方式公/英制O:米制1:英制0000/5 SEQ 自动加顺序号O:不进行1:进行0002/0 RDG 远程诊断O不进行1进行0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定0关闭1开启0012/4 AIC 轴命令的移动距离0依照指定的地址1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴3216 自动加程序段号时程序段号的间隔O 12.RS232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1 RS-232-C串行端口1 2 RS-232-C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口10 DNC1/DNC2接口,OSI因特网12 DNC1接口#20021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
)100/3 NCR 程序段结束的输出码O 1100/5 ND3 DNC运行时:读一段/读至缓冲器满O 13.与存储卡接口相关的参数0300/0 PCM 存储卡接口0:NC端接口1:电脑端接口4.与FACTOLINK相关的参数(与面板操作相关的参数)0801/0 SB2 停止位的个数0:一位1:2位0810/0 BGS 对FACTOLINK报警任务通信,没有显示FACTOLINK屏幕时0:不启动1:启动0810/1 FAS FACTOLINK使用了ANSWER 、ANSWEEx命令后,在回答栏是否进行回答编号“Z01”的显示。
发那科全参数大全

发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC 信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1. SETTING 参数(与设定相关的参数)参数号符号意义 16-T 16-M0000/0 TVC 代码竖向校验 O:不进行 1:进行0000/1 ISO EIA/ISO代码 O:EIA代码 1:ISO代码0000/2 INI MDI方式公/英制 O:米制 1:英制0000/5 SEQ 自动加顺序号 O:不进行 1:进行0002/0 RDG 远程诊断 O不进行 1进行0002/7 SJZ 手动参考位置返回 0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定 0关闭 1开启0012/4 AIC 轴命令的移动距离 0依照指定的地址 1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定 0不拆除受控轴 1拆除受控轴3216 自动加程序段号时程序段号的间隔 O 12.RS232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1 RS-232-C 串行端口1 2 RS-232-C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口 10 DNC1/DNC2接口,OSI因特网 12 DNC1接口#20021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
发那科参数(详细)
四轴参数说明N0000 00000010 (#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 00000000 #1=0纸带格式为标准格式N0002 P 00000000 (手动回零:#7 =0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000000 #0各轴镜像设定:=0关断,=1开通// 以下为串口参数N0020 P 0 (0/1:选择串口1,即JD5A;2:选择串口2,即JD5B)N0100 P 00101000 (#3=1 ISO代码对EOB仅输出LF;#5=1 DNC中连续读入直到缓冲区满,=0一段一段读入)N0101 P 00000001 (#0=1停止位两位,=0为1位;#3=0输入代码为EIA或ISO代码自动识别,=1为ASC||代码) N0102 P 0 (输入输出为RS232,使用DC1~DC4)N0103 P 11 (波特率为9600)N0110 P 00000000N0111 P 00000001 (以下为NO.0020=1时通道1,即JD5A的参数;同上含义)N0112 P 6N0113 P 10N0121 P 00000001 (以下为NO.0020=2时通道2,即JD5B的参数;同上含义)N0122 P 0N0123 P 10N0960 P 00000000// 以下为轴控制和设定单位参数N1001 P 00000000 (#0=0公制机床,=1英制机床)N1002 P 00001001 (#0=1手动同时控制轴数3轴;#2=0不使用参考点偏移功能;#3=1未回零运行G28:P/SNO.090报警;#1=1无挡块回零全轴有效,与1005#1无关)N1004 P 00000000 (#7,#1=0,最小设定和移动单位为1um或0.001deg,是-B)N1005 A1 P 00110000 A2 P 00110000 A3 P 00110000 A4 P 00110000 (#4,#5=1各轴正负方向外部减速信号对快进和工进都有效;未建立参考点自动运行#0=0,报警P/S224,#0=1,不报警,即是说不回零也可自动运行;#1=0无挡块回零无效,1002#1为0该参数设定有效)N1006 A1 P 00100000 A2 P 00000000 A3 P 00000000 A4 P 00000001 (A4,#0=1旋转轴A型,#5=0回零都为正方向) N1008 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000101 (#0=1启动旋转轴循环功能;#2=1相对坐标每转移动量取整)绝对指令旋转方向#1=0,按距目标较近的方向,#=1,按指令符号方向。
发那科参数(详细)

四轴参数说明N0000 00000010 (#2=0公制输入单位,=1为英制,这里只设公英制输入单位,机床公英制由1001#0决定;#1=1输出ISO代码,=0为EIA代码)N0001 P 00000000 #1=0纸带格式为标准格式N0002 P 00000000 (手动回零:#7 =0参考点未建立,利用减速挡块,已建立,快速定位到参考点(1005#3=1有效),#7=1都利用减速挡块回零)N0012 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000000 #0各轴镜像设定:=0关断,=1开通// 以下为串口参数N0020 P 0 (0/1:选择串口1,即JD5A;2:选择串口2,即JD5B)N0100 P 00101000 (#3=1 ISO代码对EOB仅输出LF;#5=1 DNC中连续读入直到缓冲区满,=0一段一段读入)N0101 P 00000001 (#0=1停止位两位,=0为1位;#3=0输入代码为EIA或ISO代码自动识别,=1为ASC||代码)N0102 P 0 (输入输出为RS232,使用DC1~DC4)N0103 P 11 (波特率为9600)N0110 P 00000000N0111 P 00000001 (以下为NO.0020=1时通道1,即JD5A的参数;同上含义)N0112 P 6N0113 P 10N0121 P 00000001 (以下为NO.0020=2时通道2,即JD5B的参数;同上含义)N0122 P 0N0123 P 10N0960 P 00000000// 以下为轴控制和设定单位参数N1001 P 00000000 (#0=0公制机床,=1英制机床)N1002 P 00001001 (#0=1手动同时控制轴数3轴;#2=0不使用参考点偏移功能;#3=1未回零运行G28:P/SNO.090报警;#1=1无挡块回零全轴有效,与1005#1无关)N1004 P 00000000 (#7,#1=0,最小设定和移动单位为1um或0.001deg,是-B)N1005 A1 P 00110000 A2 P 00110000 A3 P 00110000 A4 P 00110000 (#4,#5=1各轴正负方向外部减速信号对快进和工进都有效;未建立参考点自动运行#0=0,报警P/S224,#0=1,不报警,即是说不回零也可自动运行;#1=0无挡块回零无效,1002#1为0该参数设定有效)N1006 A1 P 00100000 A2 P 00000000 A3 P 00000000 A4 P 00000001 (A4,#0=1旋转轴A型,#5=0回零都为正方向) N1008 A1 P 00000000 A2 P 00000000 A3 P 00000000 A4 P 00000101 (#0=1启动旋转轴循环功能;#2=1相对坐标每转移动量取整)绝对指令旋转方向#1=0,按距目标较近的方向,#=1,按指令符号方向。
发那科常用全参数(精)

发那科系统参数系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI 键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC 信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1.SETTING 参数(与设定相关的参数)参数号符号意义16T 16M0000/0 TVC 代码竖向校验O:不进行1:进行0000/1 ISO EIA/ISO代码O:EIA 代码1:ISO 代码0000/2 INI MDI方式公/英制O:米制1:英制0000/5 SEQ 自动加顺序号O:不进行1:进行0002/0 RDG 远程诊断O不进行1进行0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定0关闭1开启0012/4 AIC 轴命令的移动距离0依照指定的地址1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴3216 自动加程序段号时程序段号的间隔O 12.RS 232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1RS232C串行端口1 2 RS232C串行接口2 3 遥控缓冲器接口 4 存储卡接口5 数据服务器接口10 DNC1/DNC2接口,OSI 因特网12 DNC1接口#20021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有03。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
发那科参数大全

发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。
一.16系统类参数0:OFF 1:ON1. SETTING 参数(与设定相关的参数)参数号符号意义 16-T 16—M0000/0 TVC 代码竖向校验 O:不进行 1:进行0000/1 ISO EIA/ISO代码 O:EIA代码 1:ISO代码0000/2 INI MDI方式公/英制 O:米制 1:英制0000/5 SEQ 自动加顺序号 O:不进行 1:进行0002/0 RDG 远程诊断 O不进行 1进行0002/7 SJZ 手动参考位置返回 0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置. 1只用减速挡块进行参考位置返回。
0012/0 MIRx 各轴镜像的设定 0关闭 1开启0012/4 AIC 轴命令的移动距离 0依照指定的地址 1总为增量命令0012/7 RMVx 各轴的受控轴拆除设定 0不拆除受控轴 1拆除受控轴3216 自动加程序段号时程序段号的间隔 O 12.RS232C口参数0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1 RS—232—C 串行端口1 2 RS—232—C串行接口2 3 遥控缓冲器接口 4 存储卡接口 5 数据服务器接口 10 DNC1/DNC2接口,OSI因特网 12 DNC1接口#20021 前台输入设备的设定0022 后台输入设备的设定0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
发那科参数大全以下是为大家整理的发那科参数大全的相关范文,本文关键词为发那科,参数,大全,发那科,系统,参数,总表,不正确,会使,,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在教育文库中查看更多范文。
......发那科系统参数总表[1]系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用mDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认pmc信号或连线无误,应检查有关参数。
一.16系统类参数0:oFF1:on1.seTTIng参数(与设定相关的参数)参数号符号意义16-T16-m0000/0TVc代码竖向校验o:不进行1:进行0000/1IsoeIA/Iso代码o:eIA代码1:Iso代码0000/2InImDI方式公/英制o:米制1:英制0000/5seQ自动加顺序号o:不进行1:进行0002/0RDg远程诊断o不进行1进行0002/7sJZ手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。
1只用减速挡块进行参考位置返回。
0012/0mIRx各轴镜像的设定0关闭1开启0012/4AIc轴命令的移动距离0依照指定的地址1总为增量命令0012/7RmVx各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴3216自动加程序段号时程序段号的间隔o12.Rs232c口参数0020此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。
0,1Rs-232-c串行端口12Rs-232-c串行接口23遥控缓冲器接口4存储卡接口5数据服务器接口10Dnc1/Dnc2接口,osI因特网12Dnc1接口#20XX1前台输入设备的设定0022后台输入设备的设定0023后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。
如果使用了正在使用的输入输出设备,将发生报警p/s233或bp/s233,同时,注意设定值0和1表示相同的输入输出设备。
)100/3ncR程序段结束的输出码o1100/5nD3Dnc运行时:读一段/读至缓冲器满o13.与存储卡接口相关的参数0300/0pcm存储卡接口0:nc端接口1:电脑端接口4.与FAcToLInK 相关的参数(与面板操作相关的参数)0801/0sb2停止位的个数0:一位1:2位学习参考......0810/0bgs对FAcToLInK报警任务通信,没有显示FAcToLInK 屏幕时0:不启动1:启动0810/1FAsFAcToLInK使用了AnsweR、Answeex命令后,在回答栏是否进行回答编号“Z01”的显示。
0进行1不进行0810/2FcL时钟是否进行反向显示0不进行反向显示1进行0810/3FYR时钟显示方式0:2位显示1:4位显示0810/4FTm时刻显示格式0:“wednov1200:00:00”形式1:“97/11/1200:00:00”0810/5FmnFAcToLInK屏幕为0彩色显示1黑白显示5.与轴控制/设定单位相关的参数1001/0Inm公/英制丝杠0:公制1:英制(设定此参数后需要关机重启)1002/0JAx慢速移动、手动快速移动及手动参考位置返回的同时受控轴数为0:一轴1:3轴1002/2sFD是否使用参考位置位移功能o:不使用1:使用1002/3AZR未回参考点时是否报警0:使用与手动参考位置返回同样的减速挡块,进行参考位置返回。
1:发生p/s报警(no:090)。
注释:使用无挡块参考位置设定功能(见参数DLZno:1002/1)时,参考位置确定前的g28命令将发出p/s报警(no:090)而与AZR的设定无关。
1004IscIsA设定最小设定单位、最小移动单位。
(设定此参数后需要关机重启)IpR设定单位为Is-b或Is-c,且以米制输入时,各轴的最小设定单位是否为最小移动单位的10倍。
设定单位为Is-A,或英制或小数点输入时,都不能是最小移动单位的10倍。
1005/0ZRn未回参考点状态下,通过自动操作运行程序且伴有移动指令时0:报警(p/s报警no.224)1:不报警DLZ另无挡块参考位置设定功能0:无效1:有效eDp各轴正方向的外部减速信号0:只对快速移动有效1:对快速移动和切削进刀有效eDm各轴负方向的外部减速信号0:只对快速移动有效1:对快速移动和切削进刀有效1006/0,1RoT,Ros设定回转轴和线性轴o1(设定此参数后需要关机重启)1006/3DIA指定直径/半径值编程o:半径编程1:直径编程1006/5ZmI回参考点方向o:正方向1:负方向1007/3RAA回转轴的转向(与1008/1:RAb合用)oo1008/0RoA回转轴的循环功能o无效o(设定此参数后需要关机重启)1008/1RAb绝对回转指令时,是否近距回转o为近方向1:依照命令值的符号6.坐标系参数1201/0ZpR手动回零点后是否自动设定工件坐标系o:不进行1:进行1201/2ZcL手动回零点后是否取消局部坐标系o:不取消1:取消学习参考......1201/3Fpc在当前位置显示屏幕上通过软键操作设定可变参考位置后0:不预设相对位置显示(相对位置显示不变化)1:相对位置显示预设为零。
1201/5AwK变更工件原点补偿值的数值后0:执行程序后变更1:立即变更1201/7wZR程序结束后是否返回g54坐标系0:不返回1:返回g541202/3RLc复位时是否取消局部坐标系o:不取消1取消1202/4g52局部坐标系设定是否考虑刀具半径补偿矢量0:不考虑1:考虑1220外部工件原点补偿值,是所有工件坐标系共同的补偿值1221工件坐标系1(g54)的工件原点补偿值1222工件坐标系2(g55)的工件原点补偿值1223工件坐标系3(g56)的工件原点补偿值1224工件坐标系4(g57)的工件原点补偿值1225工件坐标系5(g58)的工件原点补偿值1226工件坐标系6(g59)的工件原点补偿值1240第一参考位置机床坐标系下的坐标值1241第二参考位置机床坐标系下的坐标值1242第三参考位置机床坐标系下的坐标值1243第四参考位置机床坐标系下的坐标值1250自动设定工件坐标系的坐标值7.行程限位参数1300/0ouT二个行程限位的禁止区域(no.1322、no.1323)0:以内为禁止区域1:以外为禁止区域1320每个轴行程检查1的正方向边界的坐标值1321每个轴行程检查1的负方向边界的坐标值1322每个轴行程检查2的正方向边界的坐标值1323每个轴行程检查2的负方向边界的坐标值1324每个轴行程检查3的正方向边界的坐标值1325每个轴行程检查3的负方向边界的坐标值1326每个轴行程检查1的正方向的坐标值1327每个轴行程检查1的负方向的坐标值学习参考......8.与进刀速度相关的参数1401/0RpD接通电源后未回参考点前,令手动快速移动0:无效(变为慢速移动)1:有效1401/1LRp定位(g00)0:非线性插补型定位(每个轴单独按快速移动移动。
)1:线性插补型定位(刀具路径为直线。
)1401/2JZR是否用慢速移动速度进行手动参考点返回0:不进行1:进行1401/4RF0快速移动时,切削进刀速度超控0%时0:不停止1:停止1401/6RDR空运行快速移动0无效1有效1402/4JRV0:每分钟进刀1:每转进刀(请用参数no.1423设定进刀速度)1403/0mIF每分钟进刀时F的最小单位0:1mm/min1:0.001mm/min1410空运行速度1411切削进刀速度1420每个轴的快速移动(g00)速度1421快速移动倍率的低速(Fo)1422最高进给速度允许值(所有轴一样)1423每个轴的慢速进给允许值(各轴分别设)1424每个轴的手动快速移动速度1425回参考点的慢速FL1430-1431-1432每个轴的最大切削速度9.与加速/减速控制相关的参数1620快速移动g00时直线加减速时间常数1622切削进给时指数加减速时间常数1624Jog方式的指数加减速时间常数1626螺纹切削时的加减速时间常数10.与伺服相关的参数1815/1opT用分离型编码器位置检测o不用1用(需关机重启)1815/5Apc用绝对位置编码器位置检测o不用1用1816/4,5,6Dm1--3检测倍乘比DmR1820指令倍乘比cmR1819/0Fup位置跟踪功能生效o跟进1不跟进1825位置环伺服增益1826到位宽度1828运动时的允许位置误差1829停止时的允许位置误差学习参考......1850参考点的栅格偏移量1851反向间隙补偿量1852快速移动时的反向间隙补偿量1800/4RbK进给/快移时反向间补量分开11.DI/Do参数3003/0ITL互锁信号的生效o有效1无效3003/2ITx各轴互锁信号的生效o有效1无效3003/3DIT各轴各方向互锁信号的生效o有效1无效3004/5oTh超程限位信号的检测o进行1不进行3010mF,sF,TF,bF滞后的时间oo3011FIn宽度3017RsT信号的输出时间3030m 代码的容许位数3031s代码的容许位数3032T代码的容许位数3033b 代码的容许位数12.显示和编辑3100/1cem面板的键显示0:用英文显示1:图标显示3100/7coR 显示器为0黑白显示1彩色显示3101/1KbF屏幕切换及方式切换时是否清除缓存器的内容0清除1不清除3101/4bgD是否禁止在后台编辑中选择前台已选择的程序0禁止1不禁止(但仅显示程序不能编辑)3102/3chI中文显示o禁止中文显示1中文显示3103/2nmh是否显示系统报警历史屏幕0不显示1显示3104/3ppD自动设坐标系时相对坐标系清零o不预设1预设3104/4DRL相对位置显示是否包括刀长补偿量o显示刀具长度补偿后的实际位置1显示排除刀具长度补偿后的程序的实际位置(在T 系列中参数no.5002/4为0,与DRL的设定无关,总是显示排除刀具几何补偿值后的程序的位置)3104/5DRc相对位置显示是否包括刀径补偿量o显示刀具半径补偿后的实际位置1显示排除刀具半径补偿后的实际位置3104/6DAL绝对位置显示是否包括刀长补偿量o显示刀长补偿的实际位置1不显示刀长补偿后的程序的位置3104/7DAc绝对位置显示是否包括刀径补偿量o显示刀具半径补偿的实际位置1不显示刀具半径补偿后的程序的位置3105/0DpF显示实际进给速度o不显示1显示学习参考以下是为大家整理的发那科参数大全(2)的相关范文,本文关键词为发那科,参数,大全,发那科,系统,参数,总表,不正确,会使,,您可以从右上方搜索框检索更多相关文章,如果您觉得有用,请继续关注我们并推荐给您的好友,您可以在教育文库中查看更多范文。