第3讲上 控制系统的结构图
自动控制原理(经典部分)课程教案
学习好资料欢迎下载山东科技大学《自动控制原理》(经典部分)课程教案授课时间:2007-2008学年第1学期适用专业、班级:自动化2005-1、2、3班**人:***编写时间:2007年7月)())()m n s z s p --221)(1)21)(1)i j s s T s T s ζττζ++++++ 极点形成系统的模态,授课学时:2学时章节名称第二章第三节控制系统的结构图与信号流图(1)备注教学目的和要求1、会绘制结构图。
2、会由结构图等效变换求传递函数。
重点难点重点:结构图的绘制;由结构图等效变换求传递函数。
难点:复杂结构图的等效变换。
教学方法教学手段1、教学方法:课堂讲授法为主;用精讲多练的方法突出重点,用分析举例的方法突破难点。
2、教学手段:以传统的口述、粉笔加黑板的手段为主。
教学进程设计(含教学内容、教学设计、时间分配等)一、引入(约3min)从“用数学图形描述系统的优点”引入新课。
二、教学进程设计(一)结构图的组成(约7min)1、信号线:表示信号的传递方向。
2、方框:表示输入和输出的运算关系,即C(S)=R(S)*G(S)。
3、比较点:表示两个以上信号进行代数运算。
4、引出点:一个信号引出两个或以上分支。
(二)结构图的绘制(约40min)绘制:列写微分方程组,并列写拉氏变换后的子方程;绘制各子方程的结构图,然后根据变量关系将各子结构图依次连接起来,得到系统的结构图。
例题讲解。
(二)结构图的简化(约46min)任何复杂的系统结构图,各方框之间的基本连接方式只有串联、并联和反馈连接三种。
方框结构图的简化是通过移动引出点、比较点、交换比较点,进行方框运算后,将串联、并联和反馈连接的方框合并,求出系统传递函数。
1、串联的简化:12()()()G s G s G s=2、并联的简化:12()()()G s G s G s=±3、反馈连接方框的简化:11()()1()()G ssG s H sΦ=4、比较点的移动:移动前后保持信号的等效性。
2-3 控制系统的结构图与信号流图
输入节点(源节点):只有输出支路的节点。 混合节点:既有输入支路,又有输出支路的节点。 输出节点(阱点或汇点):只有输入支路的节点。
17:19 28
② 信号流图中常用术语 (ⅰ)、通道(通路):从一个节点开始,沿支路箭头方向 穿过各相连支路的路径。 开通道:通道与任何一个节点只相交一次。 闭通道(回环):通路的终点回到起点,而通道与任何其它节 点只相交一次。“自环”即闭通道的一种特殊情况。 前向通道:从源点开始到汇点结束的开通道。
H1 G1 1/ G1 1/ G2
17:19
G2
(2) 同时进行串联、并联
26
G 1G2 1/G1+1/G2+H1 (3)系统的C(S)/ R(S)
G1G2 ———————— 1+ G1+G2+G1G2H
C(s) G1(s)G2(s) —— = —————————————— R(s) 1+ G1(s)+G2(s)+G1(s)G2(s)H(s)
C ( S ) G3 G4 G1G2 R( S ) 1 G2G3 H
方法2:B移动到A (略)
17:19 25
例题6 试利用结构图等效变换原则,简化下述结构图,并求取系统 的C(S)/ R(S)。
R(S)
H(S)
A
G1(S)
BC
C(S)
G2(S)
解:(1) 同时将B处相加点前移、C处分支点后移:
17:19 18
⑸ 分支点的移动:移动原则同“⑷相加点的移动”。 ① 前往后移
X1
G(S)
X2 X1
X1
G(S)
X2 X1
1/ G(S)
② 后往前移
X1
G(S)
控制工程基础第三章 系统框图及简化

Y(s)
1 G s
X(s)
2.引出点前移
X(s)
A
G(s)
Y(s)
B
X(s)
A
G(s)
G s
Y(s) Y(s)
B
Y(s)
比较点的移动
Ø
将比较点跨越框图移动时,应遵循移动前后总输出量保持 不变的等效原则。 Y s ( X s - X s )Gs
Y s Y1 s Y2 s Y3 s
G1 s G2 s G3 s
并联的补充说明
l
这表明几个环节并联时,可以用一个等效环节去取代, 等效环节的传递函数为各环节传递函数的代数和。写成一 般形式为
G s G i s
i 1
n
Y2 s X s G2 s
Y3 s X s G3 s
Y1 s X s G1 s
输入量相同,输出量相加或相减的连接称为并联。如图所示, 三个环节的输入部分都为 X, 而输出分别为Y1、Y2、Y3 ,
Y s X s G1 s X s G2 s X s G3 s G s X s X s
X 0 (s)= G (s)E (s) B (s)= H (s)X 0 (s)
E( s) 1 = Xi (s ) 1 ±G (s)H (s) 称为误差传递函数(偏差信号与输入信号之比)
整理得
s ( ) E( ss) B ss E s =X Xii ± B ) (
E s X i s H s G s E s
Ui (s) -Uo (s) R1IR s
1/R1
U 0 ( s ) I ( s ) R2
自动控制原理第2章(2)
(3) 按信号流向将各框图连起来
Ur(s) + _ I1(s) 1/R1
Uc(s)
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
方框图等效变换 基本连接方式:串联、并联、反馈 基本连接方式:串联、并联、
1.串联方框的等效变换 1.串联方框的等效变换
R(s) C(s) G1(s) G2(s) R(s) C(s) G1(s) G2(s)
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
例3 试化简如下系统结构图,并求传递函数C(s)/R(s) 试化简如下系统结构图,并求传递函数C(s)/R(s)
H2(s) R(s)
_ _
G1(s)
G2(s)
_
G3(s) H3(s)
G4(s)
C(s)
H1(s)
解:①将G3(s)输出端的分支点后移得: (s)输出端的分支点后移得: 输出端的分支点后移得
x1 = xr gxc x2 = ax1 fx4 x3 = bx2 exc x4 = cx3 xc = dx4
xr x1
a x2 b -f
x3 c
-g
x4 d
-e
xc
华中科技大学文华学院机电学部 自动控制理论
控制系统的结构图与信号流图
2、由系统结构图绘制信号流图 在结构图的信号线上用小圆圈标志出传递的信号, ①在结构图的信号线上用小圆圈标志出传递的信号,得到节点 用标有传递函数的线段代替结构图中的方框, ②用标有传递函数的线段代替结构图中的方框,得到支路
G(s) H(s)
R(s)
C(s) G(s) 1m G(s)H(s)
化简一般方法:移动分支点或相加点 化简一般方法: 交换相加点 合并
第3讲下 控制系统的信号流图

i 1 (因为三个回路都与前向通道接触。)
1
1 R1
1
1
1 C1s
ui
ue
I1
1
I
a 1 b u
1 R2
1 C2 s
I2
1
uo
讨论:信号流图中,a点和b点之间的传输为1,是否可以将该两 点合并,使得将两个不接触回路变为接触回路?如果可以的话, 总传输将不一样。 不能合并!
因为a、b两点的信号值不一样。
1 1 1 1 1 R1C1s R2C2 s R2C1s R1R2C1C2 s 2
1 1 1 R1C1s R2C2 s R1R2C1C2 s 2
1 1 1 总传输为: P Pk k k 1 R1R2C1C2 s 2 ( R1C1 R2C2 R1C2 ) s 1
a43
a34 a25
a44
a24
X4
-a45
X5
输入节点:只有输出支路的节点,叫输入节点或源节点,如X1。 输出节点:只有输入支路的节点,叫输出节点或阱节点,如X5。 混合节点:既有输入支路,又有输出支路的节点。 如X2、 X3、 X4。 增加一条单位传输支路,可使混合节点变为 输出节点,但不能使其变为输入节点。 通道:凡从某一节点开始,沿支路的箭头方向连续经过一些节 点而终止在另一节点或同一节点的路经,统称为通道。 开通道:如果通道从某一节点开始终止在另一节点上,而且通道 中每个节点只经过一次,该通道叫开通道。
用标有传递函数 的定向线段代替 各环节的方框, 成为流图的支路。
k m b
V1
g d l f
V3
e h
C (S ) V2
•
f R1 V3 k Ⅳ C Ⅱ b Ⅲ V1 d Ⅴ e V2 1 g
《自动控制原理》第三第讲
误差系数 Kp Kv Ka
单位阶跃 输入
r(t) = u(t)
单位速度 输入
r(t) = t
单位加速 度输入
r(t) = 1 t 2 2
0
K0 0
1 1+K
I
∞ K0
0
II
∞ ∞K
0
∞
∞
1
∞
K
1
0
K
1. 稳态误差与输入信号有关;与开环增益有关;与积分环节的个 数有关。
2. 减小或消除稳态误差的方法: a、增加开环放大系数K; b、提高系统的型号数;
R(s)
E(s) -
G1 ( s)
+ G2 (s) C(s)
H (s) (b)
通常,给定输入作用产生的误差为系统的给定误差
(E=R-HC),扰动作用产生的误差为扰动误差。认为扰动输入时 系统的理想输出为零,故从输出端的误差信号为:
En
= C理想
− C实际
=
−C实际
=
−Cn
= − G2 1+ G1G2 H
=
lim sv+1R(s)
s→0
lim sv + K
s→0
由上式可见, ess 与系统的型号v﹑开环增益K及输入信号
的形式及大小有关,由于工程实际上的输入信号多为阶跃信号
﹑斜坡信号(即等速度信号) ﹑抛物线信号(即等加速度信号) 或者为这三种信号的组合, 所以下面只讨论这三种信号作用 下的稳态误差问题.
Ka
m
G(s)H (s)
=
K sv
∏ (τ is +1)
i =1
n−v
∏ (Tjs +1)
第二章_控制系统的数学模型
R
a
La
Ea
+
if -
i a (t ) U a (t )
m Mm
Jm fm
MC
dia ( t ) R a i a (t) E a dt E a C e m ( t ) u a La M m (t) M c (t) J m M m (t) C mi a (t) dm ( t ) f m m ( t ) dt
2.2 控制系统的复数域数学模型
1、传递函数的定义
在零初始条件下,线性定常系统输出量的拉普拉斯变 换与输入量的拉普拉斯变换之比,定义为线性定常系统 的传递函数。 即,
传递函数与输入、输出之间的关系,可用结构图表示:
若已知线性定常系统的微分方程为 dnc(t ) dn 1c(t ) dc(t ) a0 a1 a n 1 anc(t ) n n 1 dt dt dt m m 1 d r(t ) d r(t ) dr (t ) b0 b1 b m 1 b mr(t ) m m 1 dt dt dt
设 c(t)和r(t)及其各阶导数初始值均为零,对上 式取拉氏变换,得
(a0s a1s
n m
n 1
an 1s an )C(s)
(b 0s b1s
m 1
bm 1s bm )R(s)
则系统的传递函数为
C(s) b 0sm b1sm 1 bm 1s bm G (s ) R(s) a0sn a1sn 1 an 1s an
L[f (t )] e sF(s)
F ( s ) f ( 1 ) ( 0 ) ( 1 ) L[ f (t )dt ] , f (0) f (t )dt t 0 s s
数控系统原理图
数控系统原理图
数控系统原理图示如下:
[图 1]
该系统由主控制器、执行机构、传感器和输入设备等部分组成。
主控制器负责接收输入设备传来的指令,并根据设定的程序进行运算和控制。
执行机构则根据主控制器发出的信号,完成相应的运动和加工操作。
主控制器中包含算法处理单元、存储器和接口控制矩阵等部分。
算法处理单元负责根据输入指令和存储器中的程序,进行运算并生成控制信号。
存储器用于存储各类程序和数据,以供算法处理单元使用。
接口控制矩阵则负责将算法处理单元生成的信号转化为执行机构能够理解的形式。
执行机构主要包括主轴、刀具和工件夹持装置等。
主轴负责传动刀具进行加工操作,刀具则完成具体的切削或加工动作,工件夹持装置则固定工件,保证加工的稳定性和精度。
传感器用于检测执行机构的运动状态和加工过程中的参数,并将检测到的信号反馈给主控制器。
主控制器根据传感器反馈的信息,可以实时调整和控制执行机构的运动,保证加工的准确性和质量。
输入设备用于操作和输入加工程序。
例如数字显示屏、键盘和鼠标等。
用户可以通过输入设备选择程序、设定加工参数和操作方式等。
以上是数控系统的原理图说明。
毕业设计(论文)-PLC自动门控制系统设计
2.3.2系统设计的基本步骤
在自动门系统设计与调试过程中最主要的是先列出设计的主要步骤流程图,如图2-2所示。
公共场所的自动平移门因为使用频率非常频繁,而任何自动门的使用频率和使用寿命都有限。例如机场、大型超市和医院外门的人员流量每天可达成千上万人次,或者在特定时间段里集中通过大量人员,在这种情况下,要使用自动门就必须进行综合考虑。例如增加门的数量,加大门扇宽度,增加关门延迟时间等。具体参数如表2-1所示。
220V AC,50-60Hz
驱动器电源
380V AC,50Hz
驱动器输出额定功率
120W
在本毕业设计的自动门针对人流较多的商场,应对周围环境进行综合考虑,所以在本课题的自动门机械传动设计中考虑了以下几个方面:
1)自动门的传动主要包括安装板,轨道,门机,皮带,吊挂件等。
2)所有的组件都为插入式元件,使得安装很简便。
由于自动门在通电后可以实现无人看管,同时又可节约空调能源、防风、防尘、降低噪音,既方便又提高了建筑的档次,于是迅速在国内外的建筑市场上得到大范围的普及。同时也几乎成为了银行,写字楼,酒店等办公娱乐场所装修必不可少的一项配置。
自动平移门最常见的形式是自动门机及门内外两侧加雷达,当人走近自动门时,雷达感应到人的存在,给控制器一个开门信号,控制器通过驱动装置将门打开。当人通过门之后,再将门关闭。由于自动平移门在通电后可以实现无人管理,既方便又提高了建筑的档次,于是迅速在国内外建筑市场上得到大范围的普及。
在自动门控制系统的设计过程中主要要考虑以下几点:
控制系统(讲)

ZPEB
压力传感器的调试
蓄能器上的油压表与遥控装置上气压 表所显示的油压值相差不应超1MPa。
1、当压差过大时,用螺丝刀伸入变送器侧孔, 旋拧调零弹簧。顺时针旋拧螺钉时,遥控装置示 压表显示值升高;逆时针旋拧螺钉时,遥控装置 示压表显示值降低。这常称为“有压调等”。 2、当液压的压力为零时,蓄能器装置与遥 控装置两表指针都应回零,若遥控装置示压 表指针未回零,亦可调节其调零弹簧螺钉使 表针回零。这常称为“无压调零”。
控制装置的组成
远程控 制台
司钻控 制台
控制装置的组成
联结管 汇
控制系统的组成
ACCUMULATOR FOLD
AIR
OPEN CLOSE ANNULAR
INC
AIR VALVE
OPEN
DEC
CLOSE FLOWMETER CLOSE CLOSE
蓄能器装置 (远控台)
OPEN
MASTER OPEN
OPEN
CLOSE
遥控装置— 主(司)控台 连接管汇— 气控管汇
遥控装置— 辅助控制台
液控管汇
ZPEB
控制系统的类型
根据远控房换向阀控制方式分
1.液控液型—陆地钻井(70年代罗马尼亚引进)
2.气控液型—陆地钻井 3.电控液型—海洋钻井 气控液型比液控液型的信号传输快; 安全、经济、无污染;得到广泛的应 用。
远控房主要部件结构
电动三缸 柱塞泵 三位四通 气滑阀 气源总 阀 二位二 通转阀 三位四 通转阀 压力变 送器 压力继 电器 气动泵 压力继 气器 瓶式分隔 式蓄能器
“气控液”型控 制系统主要部件
溢流阀
调压阀
FKQ4005A型控制系统
三位四通换向阀的位置图
第3讲闭环控制系统的稳定性概念

3.1
自动控制系统稳定性概念
输入 输出
系统运行的两种状态: 稳态-----当系统的输入不随时间连续变化的时候, 系统的输出也不随时间连续变化,他们都 稳定在某一个数值上。 动态------当系统的输入从一个稳定状态变化到另 一个稳定状态时,系统的输出受到输入 的作用后,从初始的稳定状态开始,经过 一段时间动荡过程以后,稳定在某一个数 值上,动荡过程为系统的动态。
ቤተ መጻሕፍቲ ባይዱ
3.1
自动控制系统稳定性概念
3.1
自动控制系统稳定性概念 自动控制系统稳定性概念 ----稳定系统
曲线一:通过控制作用,系统的输出 逐渐达到希望值,过程比较慢 曲线二:通过控制作用,系统的输出 先是超过希望值,最后又回到希望值上 ,有一定的超调 曲线三:通过控制作用,系统的输出 超过了希望值,然后呢再朝着希望值去 走,当走到这个峰谷的时候,已经低于 希望值,然后再继续往上升,升到希望 值,超调量比曲线2略微大一些,控制过 程是最快
3.1
自动控制系统稳定性概念 自动控制系统稳定性概念 ---不稳定系统
3.1
自动控制系统稳定性概念
1 有自平衡能力的系统: 当系统受到输入的作用后,即使不对其控制,输出 也会从一个稳定状态变化到另一个稳定状态。不随时间 连续变化的时候。 2 无自平衡能力的系统: 当系统受到输入的作用后,如果不对其进行控制, 输出不会稳定下来。
3.1
自动控制系统稳定性概念
自动控制系统的任务: 无论是有自衡的还是无自衡的, 控制系统的任务总是消除一切扰动, 维持被控系统的输出为希望值。
控制工程基本系统框图及简化

3.相邻引出点之间的移动
若干个引出点相邻,表明同一信号要送到许多 地方去。因此,引出点之间相互交换位置,不会 改变引出信号的性质,不需要作传递函数的变换。
比较点合并
l 注意:比较点和引出点之间一般不宜交换 其位置。
l 由方框图求系统传递函数的基本思路:利用等效 变换法则,移动比较点和引出点,消去交叉回路, 变换成可以运算的简单回路。
s
ê注意:等效传递函数等于前向通道传递函数除以1加(减) 前向通道传递函数与反馈通道传递函数乘积
误差传递函数
X0 (s)= G(s)E(s)
B(s)= H (s)X0 (s)
Es Xi s H sGsEs
EE(ss)= XXii(ss)±BB(ss)
整理得
E(s) Xi (s)=
1
1±G(s)H (s)
G1s G2 s G3s
并联的补充说明
l 这表明几个环节并联时,可以用一个等效环节去取代, 等效环节的传递函数为各环节传递函数的代数和。写成一 般形式为
n
Gs Gi s i 1
(3)反馈
X(s)
Gz
s
1
Gs GsH
s
Y(s)
H
n 如果将系统或环节的输出反馈到输入端与输入信号进行比
较,就构成了反馈连接,如 上图 所示。其中 G1(s) G2(s) 可以是等效方框图,即它们可以是由若干元件方框串、并
若反馈通道传递函数H (S)= 1时,称为单位反馈系统,
此时:
F
(s)=
G (s) 1 G (s)
任何复杂系统的框图,都无非是由串联、并 联和反馈三种基本连接方式组成的,但要实现 上述三种运算,必须先将复杂的交织状态变换 为可运算状态,即进行框图的等效变换。
第3章 数字程控交换机的系统结构

3.3.3 存储器
中央控制系统中的存储器一般可划分为两个区域:数据存储 器和程序存储器。数据存储器也称暂时存储器,用来暂存呼 叫处理中的大量动态数据,可以写入和读出。
上一页 返回
3.4 数字程控交换机的常用外围设备
3.4.1 电话机
电话通信是通过声能与电能相互转换、并利用“电”这个媒 介来传输语言的一种通信技术。两个用户要进行通信,最简 单的形式就是将两部电话机用一对线路连接起来。 1. 当发话者拿起电话机对着送话器讲话时,声带的振动激励 空气振动,形成声波。 2. 声波作用于送话器上,使之产生电流,称为话音电流。 3. 话音电流沿着线路传送到对方电话机的受话器内, 4. 而受话器作用与送话器刚好相反,把电流转化为声波,通 过空气传至人的耳朵中。 以上就完成了最简单的通话过程。
上一页 下一页 返回
3.4 数字程控交换机的常用外围设备
2. CAS检测电路
3.3 数字程控交换机的控制系统
2. 话务分担工作方式 话务分担工作方式的两台处理机各自配备一个存储器,在两 台处 理机之间有互相交换信息的通路和一个禁止设备,如图 3-5所示。 3. 主/备用方式 这种方式的两台处理机,一台为主用机,另一台为备用机, 如图3-6所示。主用机发生故障时,备用机接替主用机进行 工作。备用方式有两种,即冷备用和热备用。
上一页 下一页 返回
3.2 数字程控交换机的用户话路
上行通路和下行通道的用户级 T 接线器分别采用读出控制方 式和写入控制方式。LCMU和LCMD的内容分别代表话音存 储器( SMU和 SMD)的读出地址和写入地址,所以控制存 储器的单元数是 128个单元,与各话音存储器的单元数一样。
3.2.3 数字用户电路
数字用户电路(Digital Line Circuit,DLC)是数字用户 终端设备与程控数字交换机之间的接口电路。 1.S接口 数字用户终端的数字信息采用四线制方式时,应采用 S 接口。 2.U接口 U 接口是在网络终端到电话局之间的 ISDN用户线采用二线 制市话电缆的接口设备。
微型计算机控制系统课件第3章 输入输出接口及输入输出通道
除缓冲器和锁存器外,还有一类既有缓冲功能又有锁存功 能的器件,Intel公司8255A可编程并行I/O扩展接口芯片就是 这样的器件。8255A与工业控制计算机(ISA)总线的连接如 图3-5所示。8255A有三个可编程的8位输入输出端口A、B和 C,内部有一个控制寄存器。通过向控制寄存器写入控制字定 义A、B、C端口的数据传输方向(输入或输出)。图中 ATF16V8作译码器用。
数字量输入接ቤተ መጻሕፍቲ ባይዱ原理图
数字量输出接口原理图
输入输出接口设计
输入接口是输入通道与工业控制机总线之间的桥梁,输出接口是输出通道与工业控制机总线之间 的桥梁。下图是由缓冲器和译码器组成的数字量输入接口示例,以及锁存器和译码器组成的数字量输 出接口示例。
数字量输入接口示例
数字量输出接口示例
输入输出接口设计
S1=/A9+/A8+A7+A6+A5+A4+A3+A2 Y0=AEN+S2
输入输出接口与输入输出通道 数据信息的输入输出控制方式 数字量/模拟量输入输出通道的基本组成
基于板卡的输入输出接口与通道的设计
基于计算机通讯接口的输入输出接口与通道的 设计
03 自动控制原理—第三章(2)
一,稳态误差的定义
1. 系统误差ε(t)定义为:系统响应的期望值c0(t)与实际值c (t)之差,即: ε (t ) = co (t ) c (t ) ε (s ) = co (s ) c(s ) 通常以偏差信号 R ( s ) H ( s ) C ( s ) 为零来确定希望值,即:
R (s ) H (s )CO (s ) = 0
3.6 系统稳态性能分析
评价一个控制系统的性能时,应在系统稳定的前提 下,对系统的动态性能与稳态性能进行分析.如前所 述,系统的动态性能用相对稳定性能和快速性能指标 来评价.而系统的稳态性能用稳态误差指标来评价, 即根据系统响应某些典型输入信号的稳态误差来评价. 稳态误差反映自动控制系统跟踪输入控制信号或抑 制扰动信号的能力和准确度.稳态误差主要与系统的 结构,参数和输入信号的形式有关.
上述三种误差系数定量地描述了系统在稳态误差与给定信号 种类和大小之间的关系,统称为系统静态误差系数. 4.控制系统的型别与无差度阶数 系统的开环传递函数可以看成由一些典型环节组成,即:
G K (s) = K sν
∏ (τ s + 1)∏ (τ
i =1 n1 i k =1 n2 j j =1 l =1
2.传递函数: Gc(s)=Kp(1+τds) 若偏差正处于下降状态,则 d τ d e (t ) < 0 dt 说明比例微分控制器预见到偏差在减小,将产生一个适当大小的控制 信号,在振荡相对较小的情况下将系统输出调整到期望值. 因此,利用微分控制反映信号的变化率(即变化趋势)的"预报"作 用,在偏差信号变化前给出校正信号,防止系统过大地偏离期望值和 出现剧烈振荡的倾向,有效地增强系统的相对稳定性,而比例部分则 保证了在偏差恒定时的控制作用. 可见,比例—微分控制同时具有比例控制和微分控制的优点,可以根 据偏差的实际大小与变化趋势给出恰当的控制作用. PD调节器主要用于在基本不影响系统稳态精度的前提下提高系统的相 对稳定性,改善系统的动态性能.
现代控制理论-第三章 4 规范分解
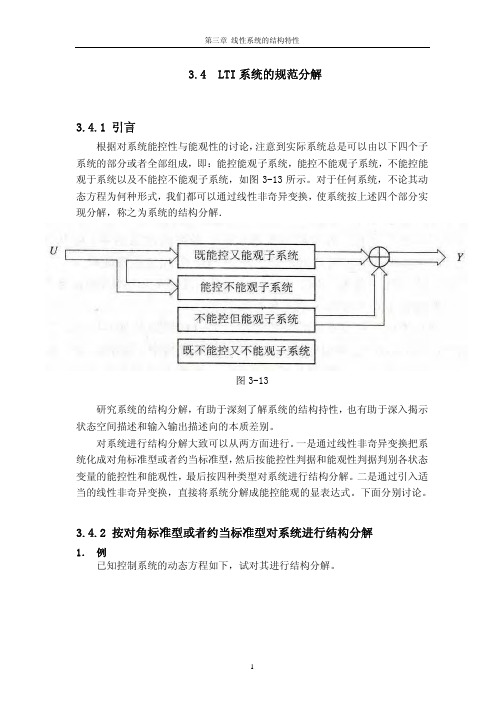
解: 1. 给定的系统其动态方程已经是对角线标准型,状态变量已经解耦。 2. 根据能控性判据和能观性判据容易判定:这个系统是既不完全能控又不 完全能观的。
3.
结构分解:因为状态变量已经解耦,不难看出,状态变量
⎡ ⎢ ⎣
x1 x2
⎤ ⎥ ⎦
能控,⎡⎢ ⎣
x2 x3
⎤ ⎥ ⎦
能观,[x4 ] 则既不能控又不能观,[x2 ] 能控又能观。
系统不能控,其能控状态维数为 2。 确定系统变换为能控规范型的变换阵:
19
第三章 线性系统的结构特性 20
第三章 线性系统的结构特性 21
第三章 线性系统的结构特性
4、传递函数阵: 卡尔曼—吉伯特定理: 一个系统的传递函数阵 G(s)所表示(特征、描述)的
⎢0⎥ ⎣⎢0⎦⎥
⎢⎣x4 ⎥⎦
⎡ x2 ⎤
y = [1
0
1
0]
⎢ ⎢ ⎢ ⎢ ⎣
x1 x3 x4
⎥ ⎥ ⎥ ⎥ ⎦
4.传递函数:
2
第三章 线性系统的结构特性
G(s) = C(sI − A)−1 B = 2 s +1
G(s) 只表示了既能控又能观子系统,不能完全表征系统。{A B C} 是 G(s)
+
《自动控制原理》第三章 第3讲
07:44
16
三、典型二阶系统的动态过程分析 (一)衰减振荡瞬态过程 (0 < ζ < 1):欠阻尼
s1, 2 = −ζω n ± jω n 1 − ζ 2
c(t ) = 1 − e −ζω n t (cos ω d t +
ζ
1−ζ 2
sin ω d t ) ,
t≥0
⒈ 上升时间 t r :根据定义,当 t = t r时,c(t r ) = 1 。
δ%=
c(t p ) − c(∞) c (∞ )
−
×100% = (c(t p ) − 1) ×100%
ζπ
1−ζ 2
c ( ∞) =1
故:
δ%=e
×100%
1−ζ 2
ζ
)
s1, 2 = −ζω n ± jω n 1 − ζ 2
1−ζ 2 ωn 1 − ζ 2 =− tg (π − β ) = − ζω n ζ
tg
−1
×
− ζω n
ωn
β
j ω n 1 − ζ 2 = jω d
σ = ζω n
(−
1−ζ 2
ζ
) =π − β
×
− jω n 1 − ζ 2
2
c(t ) = 1 − e −ω nt (1 + ω nt )
二阶系统的单位 阶跃响应为稳态 值为1的无超调 单调上升过程。
c(t ) r (t )
1
c(t )
0
t
当 ζ > 1时, 极点为: s1, 2 = −ζω n ± ω n ζ 2 − 1 即特征方程为 2 = [ s + ω n (ζ − ζ 2 − 1)][ s + ω n (ζ + ζ 2 − 1)] s 2 + 2ζω n s + ω n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例题
[例]利用结构图等效变换讨论两级RC串联电路的传递函数。
R1
R2
ui
i1 i, u
C1i2 C2
[解]:不能把左图简单地看成两个
i2
uo
RC电路的串联,有负载效应。根 据电路定理,有以下式子:
[ui (s) u(s)]
1 R1
I1(s)
I1(s) I (s) I2(s)
I(s) 1 u(s) C1s
ui (s)
1
-
R1
u(s)
I1(s)
I (s)
-
I1(s)
I2 (s)
I (s)
1 C1s
u(s)
R1
R2
ui
i1
i, u
C1i2 C2 i2 uo
[u(s) uo (s)]
1 R2
I 2 (s)
u(s)
TaTms2 Tms 1
ug (s)
ue (s)
K1
u1(s) K2(s 1) u2 (s)
K3
ua (s)
Ku
TaTms2 Tms 1
u f (s)
Kf
- (s)
在结构图中,不仅能反映系统的组成和信号流向,还能表示 信号传递过程中的数学关系。系统结构图是系统的一种数学 模型,是复域的数学模型。
R1
U 0 (s)
I1(s)
R1
I
2
(s
)
1 Cs
Cs
I 2 (s)
I (s)
U 0 (s)
R2
I1(s)
I (s)
I 2 (s)
Ui(s)
1/ R1 I1(s) R1
Uo(s)
Cs I2(s) I(s)
I1(s)
R2 Uo(s)
RC无源网络结构图
绘制系统结构图的步骤:
第①步:应用相应的物理、化学原理写出 各元件方程;
Ua (s)
Ku
TaTms2 Tms 1
- (s)
反馈环节:
u f (s) (s)
K
f
Ω(s ) K f u f (s)
ug ue-
+ u1
-
+
u 功率
u 2 放大 a
器
Mc
负载
uf
测速发电机
将上面几部分按照逻辑连接起来,形成下页所示的完整结构图。
M c (s) Km (Tas 1)
上面结论具有一般性。如 G(s)H (s) 1 , 则
(s)
G(s)
1
1 G(s)H (s) H (s)
上式表明,当系统的开环传递函数大大大于1时,闭环传 递函数与前向通道传递函无关,仅为反馈通道传递函数 的倒数。
R(s) E(s) G1(s)
-
G2 (s) C(s)
B(s) H (s)
第②步:按照所列出的方程分别绘制相应 元件的方框图;
第③步:用信号线按信号流向依次将各元 件方框连接起来,便得到系统的结构图。
[例1].求如图所示的速度控制系统的结构图。
ug ue+ u1
-
功率
+
u u 2 放大器 a
Mc
负载
uf
测速发电机
各部分传递函数:
比较环节:
ue (s) ug (s) u f (s)
把相加点从环节的输出端移到输入端:
X1(s) G(s) X 2 (s)
Y (s)
X1(s)
X2(s) N(s)
N(s) ?
Q Y (s) X1(s)G(s) X2(s), Y (s) X1(s)G(s) X2(s)N(s)G(s), N(s) 1
G(s)
G(s) Y (s)
ui (s)
-
1 I1(s) - 1 u(s)
R1
I (s) C1s
1 R2C2s 1
uo (s) ①
ui (s) -
-1
R1
R1C2 s
1
u(s)
C1s
相邻信号相加点位置互换
1 R2C2s 1
uo (s) ②
ui (s) -
1
-
R1
R1C2 s 1 u(s)
C1s
1 R2C2s 1
uo (s) ③
1.系统结构图的组成和绘制
控制系统的结构图是由许多对信号进行单向 运算的方框和一些信号流向线组成,它包含四 种基本单元: 信号线 引出点(或测量点) 比较点(或综合点) 方框(或环节)
信号线 信号线是带有箭头的直线,箭头表示信号的
流向,在直线旁标记信号的时间函数或象函数。
u(t),U (s)
n i 1
Gi (s)
G(s)
Y (s) X (s)
n i 1
Gi (s)
反馈联接:
X (s) E(s) G(s)
H (s)
Y (s)
Y (s) E(s)G(s); E(s) X (s) H (s)Y (s) G(s) Y(s) G(s)
X (s) 1mG(s)H (s)
②信号分支点的移动: 分支点从环节的输入端移到输出端:
X1(s) G(s) Y (s)
X1(s)
X1(s) G(s)
Y (s)
N(s) X1(s)
Q X1(s)G(s)N(s) X1(s), N(s) 1
G(s)
N(s) ?
分支点从环节的输出端移到输入端:
X1(s) G(s) Y (s) Y (s)
绘制系统结构图的步骤:
第①步:应用相应的物理、化学原理写出 各元件方程;
第②步:按照所列出的方程分别绘制相应 元件的方框图;
第③步:用信号线按信号流向依次将各元 件方框连接起来,便得到系统的结构图。
2.结构图的等效变换和简化
[定义]:结构图的等效变换-在结构图上进行 数学方程的运算。 [类型]:①环节的合并
--串联 --并联 --反馈连接 ②信号分支点或相加点的移动 [原则]:变换前后环节的数学关系保持不变。
(一)环节的合并:有串联、并联和反馈三种形式。
环节的串联:
X (s) G1(s) …
Y (s) Gn (s)
环节的并联:
G1 ( s )
X (s)
Gn (s)
Y (s)
G(s)
Y (s) X (s)
Q X1(s)G(s) Y (s) X1(s)N(s) Y (s) N(s) G(s)
X1(s) G(s) Y (s) N(s) Y (s)
N(s) ?
[注意!]:
相临的信号相加点位置可以互换;见下例
X1(s)
X2(s)
X3(s)
Y (s)
X1(s)
X3(s)
X 2 (s)
如把反馈通道在A点处断开,如下图所示,得
R(s)
E(s) G(s)
C(s)
B(s) R(s)
G(s)H
(s)
GO (s)
A
B(s) H(s)
叫闭环系统的开环传递函数。 从而闭环传递函数可表为:
(s) C(s)
G(s)
前向通道传递函数
R(s) 1 GO (s) 1开环传递函数
引出点(或测量点) 引出点表示信号引出或测量的位置。从同一
位置引出的信号在数值和性质方面完全相同。
u(t),U (s)
u(t),U (s)
比较点(或综合点)
比较点表示对两个以上的信号进行加减运算,
“+”号表示相加,“-”号表示相减,“+”号可省
略不写。
u(t) r(t)
u(t),U (s) U (s) R(s)
ui (s) -
1 R1C1s 1
R1C2 s 1
R2C2s 1
uo (s) ④
1
G(s) uo (s) (R1C1s 1)(R2C2s 1)
1
ui (s) 1
R1C2s
(R1C1s 1)(R2C2s 1) R1C2s
(R1C1s 1)(R2C2s 1)
Y (s)
同一信号的分支点位置可以互换:见下例
X1(s)
X (s) G(s) Y (s)
X 2 (s)
X (s) G(s) Y (s)
X 2 (s)
X1(s)
相加点和分支点在一般情况下,不能互换。
X (s)
X 3 (s)
G(s)
X 2 (s)
X (s)
X 3 (s)
G(s)
X 2 (s)
所以,一般情况下,相加点向相加点移动,分支点向 分支点移动。
-
1 R2
I2 (s)
uo (s)
I 2 (s)
1 C2s
uo (s)
I2 (s)
1 C2s
uo (s)
总的结构图如下:
ui (s)
-
1 I1(s) - 1 u(s)
R1
I (s) C1s
-
1
1 uo (s)
R2 I2(s) C2s
为了求出总的传递函数,需要进行适当的等效变换。一个
可能的变换过程如下: C2s
功放环节:
ua (s) u2 (s)
K3
u2 (s)K3 ua (s)
ug ue+ u1
-
功率
+
u u 2 放大器 a