控制系统结构图
控制系统结构图与信号流图
控制系统结构图与信号流图
1
提纲:
❖ 一 、控制系统的结构图 ❖ 二、控制系统的信号流图 ❖ 三、控制系统的传递函数
2
引言:
求系统的传递函数时,需要对微分方程组 或经拉氏变换后的代数方程组进行消元。而 采用结构图或信号流图,更便于求取系统的 传递函数,还能直观地表明输入信号以及各 中间变量在系统中的传递过程。因此,结构 图和信号流图作为一种数学模型,在控制理 论中得到了广泛的应用。
J s2 Bs
(f)
Eb (s) Kesm (s) (g)
c
(s)
1
i
m
(s)
(h)
图2-27 式(2.80)(e)~(h)子方程框图
10
按系统中各元件的相互关系,分清各输入量和输出量, 将各结构图正确地连接起来(图2-28)。
图2-28 位置随动系统结构图
11
略去La,系统结构图如图2-29所示:
8
Ia
(s)
U
a (s) La s
Eb (s) Ra
(2.80)(a)
e(s) r(s)c(s)
(b)
Us(s) Kse(s)
(c)
Ua (s) KaU s (s)
(d)
图2-27 式(2.80)(a)~(d)子方程框图
9
M d (s) KmIa (s) (e)
m(s)
M d(s) M L(s)
3
一 、控制系统的结构图
(一 )结构图的概念 图2-24 RC网络的微分方程式为:
1
ur Ri C idt
uc
1 C
idt
也可写为:
uc
1 C
ห้องสมุดไป่ตู้ idt
第3讲控制系统的结构图与信号流图
X 3 (s)
X ( s)
G (s)
X 2 ( s)
X 2 ( s)
所以,一般情况下,相加点向相加点移动,分支点向分 支点移动。教材表2-4给出了结构图等效变换的若干基本法 则.(要求熟练掌握)
例题
[例2]利用结构图等效变换讨论两级RC串联电路的传递函数。 R1 R2 [解]:不能把左图简单地看成两个 i1 i2 C1 C2 i uo RC电路的串联,有负载效应。根据 ui 2 电路定理,有以下式子: i, u
Y ( s)
X 3 (s)
X 2 ( s)
同一信号的分支点位置可以互换:见下例
X 1 ( s)
X 2 ( s)
X ( s)
G (s)
Y ( s)
X ( s)
Y ( s ) G (s)
X 1 ( s)
X 2 ( s)
相加点和分支点在一般情况下,不能互换。
X ( s)
X 3 (s)
G (s)
第③步:用信号线按信号流向依次将各元 件方框连接起来,便得到系统的结构图。
[例1].求如图所示的速度控制系统的结构图。
ug
ue+
-
u1
+
u
功率 2 放大器
Mc
ua
负载
uf
测速发电机
各部分传递函数:
比较环节:
ue ( s ) u g ( s ) u f ( s )
u g (s)
u ( s )
u1 ( s)
K 2 (s 1)
u2 ( s )
u2 ( s )
K3
ua ( s )
Mc
第3讲上 控制系统的结构图概述

Y ( s)
n Y ( s) G( s) Gi ( s) X ( s) i 1
环节的并联:
X ( s)
G1 ( s )
Y ( s)
Gn (s)
反馈联接:
n Y ( s) G( s) Gi ( s ) X ( s) i 1
X ( s) E ( s ) G ( s)
Y ( s)
M c ( s)
反馈环节:
u f ( s) ( s)
Kf
K m (Ta s 1) TaTm s 2 Tm s 1 Ku TaTm s 2 Tm s 1
Ω(s )
- ( s )
Kf
u f ( s)
U a ( s)
ug
ue -
+
u1
+
u
功率 2 放大 器
Mc
ua
负载
uf
测速发电机
1 [ui ( s) u ( s )] I1 ( s ) R1
I1 (s) I (s) I 2 (s)
ui ( s )
u (s)
-
1
R1
I1 ( s )
I (s)
I1 ( s )
I (s)
1
I 2 ( s)
1 I (s) u ( s) C1s
-
( s )
Kf
在结构图中,不仅能反映系统的组成和信号流向,还能表示 信号传递过程中的数学关系。系统结构图是系统的一种数学 模型,是复域的数学模型。
绘制系统结构图的步骤:
第①步:应用相应的物理、化学原理写出 各元件方程; 第②步:按照所列出的方程分别绘制相应 元件的方框图;
第③步:用信号线按信号流向依次将各元 件方框连接起来,便得到系统的结构图。
控制系统结构图与信号流图

如图2-39所示。n个传递函数依次串联的等效传递函数, 等于n个传递函数的乘积。
(2)并联连接的等效变换 G1(s)与G2(s)两个环节并联连接,其等效传递函数等于
该两个传递函数的代数和,即:
G(s)= G1(s)±G2(s)
(2.82)
等效变换结果见图2-40(b)。
18
图2-40
n个传递函数并联其等效传递函数为该n个传递函数的代 数和,如图2-41所示:
5
图2-25 RC网络的结构图
结构图:根据由微分方程组得到的拉氏变换方程组,对 每个子方程都用上述符号表示,并将各图形正确地连接 起来,即为结构图,又称为方框图。
结构图也是系统的一种数学模型,它实际上是数学模型 的图解化 。
6
(二)系统结构图的建立 建立系统的结构图,其步骤如下: (1)建立控制系统各元部件的微分方程。
图2-29 La=0的位置随动系统结构图
12
例2.2 试绘制图2-30所示无源网络的结构图。
图2-30 例2.3网络图
图2-31 例2.3网络的结构图
解:ur为网络输入,uc为网络输出。
一个系统的结构图不是唯一的,但经过变换求得的总 传递函数都应该是相同的。上例所示网络的结构图还可 用图2-32表示。
第四节
控制系统结构图与信号流图
1
提纲:
❖ 一 、控制系统的结构图 ❖ 二、控制系统的信号流图 ❖ 三、控制系统的传递函数
2
引言:
求系统的传递函数时,需要对微分方程组 或经拉氏变换后的代数方程组进行消元。而 采用结构图或信号流图,更便于求取系统的 传递函数,还能直观地表明输入信号以及各 中间变量在系统中的传递过程。因此,结构 图和信号流图作为一种数学模型,在控制理 论中得到了广泛的应用。
控制系统的结构图与信号流图
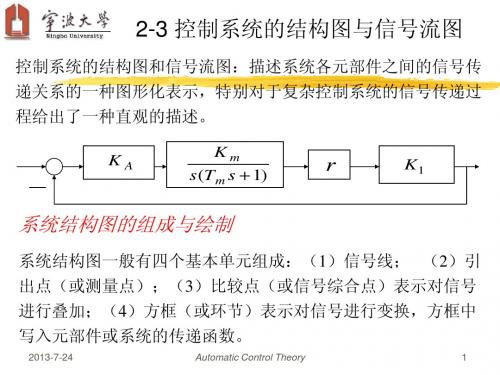
控制系统的结构图和信号流图:描述系统各元部件之间的信号传 递关系的一种图形化表示,特别对于复杂控制系统的信号传递过 程给出了一种直观的描述。
KA
Km s (T m s 1)
r
K1
系统结构图的组成与绘制
系统结构图一般有四个基本单元组成:(1)信号线; (2)引 出点(或测量点);(3)比较点(或信号综合点)表示对信号
Automatic Control Theory 2
M s C M U a (s )
2013-7-24
绳轮传动机构: L( s ) r m ( s )
测量电位器:
E (s)
E 2 ( s ) K 1 L( s )
M s (s)
CM
U a (s )
E1 ( s )
m (s) L (s )
2013-7-24 Automatic Control Theory 14
•回路 起点和终点同在一个节点上,而且信号通过每个节点不多 于一次的闭合通路(单独回路)。 •不接触回路 回路之间没有公共节点时,该回路称为不接触回路。
信号流图的绘制
(1)由微分方程绘制信号流图: RC串联电路的信号流图
u r (t ) i1 (t ) R1 u c (t ) u c (t ) i (t ) R2 1 i2 (t ) dt i1 (t ) R1 u1 (t ) C i1 (t ) i2 (t ) i (t )
之间的所有传递函数之乘积,记为 H(s)
开环传递函数:反馈引入点断开时,输入端对应比较器输出 E(s)
到输入端对应的比较器的反馈信号 B(s) 之间所有传递函数的乘 积,记为GK(s), GK(s)=G(s)H(s) E (s) C (s)
自动控制原理 控制系统的结构图

12
(1)串联连接
R( s )
U (s) 1
G (s) 1
G (s) 2
C( s )
R(s)
C(s)
G(s)
(a)
(b)
特点:前一环节的输出量就是后一环节的输入量
U1(s) G1(s)R(s) C(s) G2 (s)U1(s) G2 (s)G1(s)R(s)
注意:进行相加减的量,必须具有相同的量纲。
X1 +
+
X1+X2 R1(s)
-
R1(s)R2(s)
X1
X2
R2(s)
X3
X1-X2 +X3 -
X2
4
(4) 引出点(分支点、测量点) 表示信号测量或引出的位置
R(s)
G (s) 1
X(s)
G (s) 2
C(s)
X(s) 引出点示意图
注意:同一位置引出的信号大小和性质完全一样
G(s)
分支点(引出点)前移
C(s) C(s)
引出点后移
R(s)
G(s)
R(s)
分支点(引出点)后移
R(s)
G(s)
C(s)
G(s)
C(s)
C(s) R(s)G(s)
G(s) R(s)
C(s) R(s)
C(s) R(s)
G1(s)G2
(s)
G(s)
结论:
n
G(s) Gi (s) n为相串联的环节数 i 1
串联环节的等效传递函数等于所有传递函数的乘积
13
(2)并联连接
G1 (s)
2.3 控制系统的结构图方框图3
第二章 线性系统的数学模型
2.3 控制系的结构图/方框图
相加点之间的移动
X(s)
R(s)
C(s)
Y(s)
X(s)
R(s)
C(s)
Y(s)
多个相邻的相加点可以随意交换位置
分支点移动
等效变换,要求变换前后的输出信号保持不变
R(s)
G(s)
分支点(引出点)前移
R(s) G(s)
C(s) C(s)
C(s)
G?(s)
C(s)
R(s)
G(s)
R(s)
分支点(引出点)后移
G(s) R(s)
C(s)
?
R(s)
C(s) R(s)G(s)
R(s) R(s)G(s) 1 R(s)
G(s)
分支点之间的移动
B R(s) A
B
R(s)
A
相邻引出点交换位置,不改变信号的性质
负号的移动 有缘学习更多+谓ygd3076考证资料或关注桃报:奉献教育(店铺)
负号可以在信号线上越过方框移动,但不能越过 比较点和引出点
R(s)
C(s)
G(s) H (s)
R(s)
C(s)
G(s) H (s) 1
等效单位反馈 有缘学习更多+谓ygd3076考证资料或关注桃报:奉献教育(店铺)
R(s)
C(s)
G(s)
H (s)
? R(s) 1 H (s)
H (s)
C(s)
G(s)
自动控制原理控制系统的结构图
G1 ( s )
G2 (s)
+ -
G3 (s) C(s) ①
H (s)G2 (s)
+
-
G3 (s)
C(ห้องสมุดไป่ตู้)
②
H (s)G2 (s)
R(s)
G1(s)G2 (s) G4 (s)
G3 (s)
C(s)
1 G2 (s)G3(s)H (s)
G(s) G3(s)(G1(s)G2 (s) G4 (s))
1 G2 (s)G3(s)H (s)
C(s) R(s)
G1(s)G2
(s)
G(s)
结论:
n
G(s) Gi (s) n为相串联的环节数 i 1
串联环节的等效传递函数等于所有传递函数的乘积
13
(2)并联连接
G1 (s)
C1 (s)
R(s)
C(s)
R( s )
C2 (s) G2 (s)
C( s )
G(s)
(a)
(b)
特点:输入信号是相同的,输出C(s)为各环节的输出之和.
- Uo (s)
(d)
将图(b)和(c)组合起来即得到图(d),图(d)为该 一阶RC网络的方框图。
11
2.3.3 系统结构图的等效变换和简化
为了由系统的方框图方便地写出它的闭环传递函 数,通常需要对方框图进行等效变换。
方框图的等效变换必须遵守一个原则,即: 变换前后各变量之间的传递函数保持不变
在控制系统中,任何复杂系统的方框图都主要由 串联、并联和反馈三种基本形式连接而成。
u
o
idt c
对其进行拉氏变换得:
I (s)
U
o
自动控制原理控制系统的结构图
I1(s)
I2 (s)
CR1s
7
i2
C
i
i1 R1
ui
R2
uo
(3)
I(s) I1(s) I2 (s)
I2 (s)
I (s)
I1(s)
(4)U o (s) R2 I (s)
I (s)
Uo (s)
R2
8
(1)Ui (s)
(3)
- Uo(s)
I2 (s)
(2)
1
I1(s)
I1(s)
I2 (s)
- Uo (s)
(d)
将图(b)和(c)组合起来即得到图(d),图(d)为该 一阶RC网络的方框图。
11
2.3.3 系统结构图的等效变换和简化
为了由系统的方框图方便地写出它的闭环传递函 数,通常需要对方框图进行等效变换。
方框图的等效变换必须遵守一个原则,即: 变换前后各变量之间的传递函数保持不变
在控制系统中,任何复杂系统的方框图都主要由 串联、并联和反馈三种基本形式连接而成。
u
o
idt c
对其进行拉氏变换得:
I (s)
U
o
(s)
U
i (s)
I (s) sC
U R
o
(s)
(1) (2)
10
I (s)
U
o
(s)
U
i (s)
I (s) sC
U R
o
(s)
(1) (2)
Ui (s)
I(s)
(b)
Uo (s)
I(s)
(c)
Uo (s)
Ui (s)
I(s)
Uo (s)
第2章第4节控制系统的结构图
C ( s ) = G 2 ( s )U ( s ) = G 2 ( s )G1 ( s ) R ( s ) = G ( s ) R ( s ) G( s) = G1 ( s)G2 ( s)
推广到n个方框串联连接
+ ψ 电位器1 up 放大器 电动机 If 励磁绕组 电位器2 Ia 发电机原动机 发电机 齿轮传 动机构 φ 负载
J.Z. Xiao, CEIE, HBU
随动系统原理结构图
6
(1)电位器组:
u p = k p (ψ − ϕ)
ψ(s) -
U p ( s ) = k pψ ( s ) − k p ϕ ( s )
ψ(s) kp
UP(s) ka -
I f (s) 1 R f (Tf s + 1)
kg
1 kd (TaTm s 2 + Tm s + 1)
kp
ω(s)
kt s
φ(s)
J.Z. Xiao, CEIE, HBU
随动系统结构框图
9
三、结构图的等效变换
等效变换原则: 变换前后各变量之间的传递关系保持不变。 三种基本连接形式: 串联、并联和反馈 1、串联连接的等效传递函数
§2.4 控制系统的结构图(方框图)
结构图的组成 结构图的绘制 结构图的等效变换
由代数关系,是否可将复杂系统视为其 各子系统间的输入输出连接形式呢?
R1
L
C1
R2
ui (t )
′ uo (t )
ui′(t )
C2
uo (t )
组合后的 系统模型 是什么?
自动控制原理 控制系统的结构图
R1
CR1s
I (s)
(4) I(s)
Uo (s)
R2
I1(s)
Ui (s)
- Uo(s)
1
I1(s)
I2 (s)
I (s)
Uo (s)
R1
CR1s
R2
I1(s)
9
练习
R
画出RC电路的方框(结构)图。 ui i C
uo
解: 利用基尔霍夫电压定律及电容
元件特性可得:
(a) 一阶RC网络
i
ui
◎对多回路结构,可由里向外进行变换,直至变 换为一个等效的方框,即得到所求的传递函数。
26
基本概念及术语
控制器
N( s)
被控 对象
+ E( s)
++
C(s)
R( s)
G1 ( s )
G2 (s)
反馈信号
B( s)
C(s) H( s)
反馈控制系统方块图
(1)前向通路传递函数---假设N(s)=0
C(s)与误差E(s)之比,(打开反馈后,C(s)与R(s)之比)
在控制系统中,任何复杂系统的方框图都主要由 串联、并联和反馈三种基本形式连接而成。
其他变化(比较点的移动、引出点的移动)以此三 种基本形式的等效法则为基础。
12
(1)串联连接
R( s)
U (s) 1
G (s) 1
G (s) 2
C( s)
R(s)
C(s)
G(s)
(a)
(b)
特点:前一环节的输出量就是后一环节的输入量
C1 (s)
R(s)
C(s)
R( s)
控制系统的结构图与信号流图.ppt

X 3 (s)
G(s)
X 2 (s)
X 2 (s)
所以,一般情况下,比较点向比较点移动,分支
点向分支点移动。
14:02
21
2)比较点相对方框的移动:(移动的前后总的输出保持不变) 比较点后移
X1(s) X2(s)
G(s) Y (s)
X1(s) G(s) X2(s) N(s)
N(s) ?Y (s) [X1(s) X2(s)]G(s), 又 :Y (s) X (s)1G(s) X2(s)N(s), N(s) G(s)
1 R1C1s 1
R1C2 s 1
R2C2s 1
uo (s)
1
G(s) uo (s) (R1C1s 1)(R2C2s 1)
1
ui (s) 1
R1C2s
(R1C1s 1)(R2C2s 1) R1C2s
(R1C1s 1)(R2C2s 1)
14:02
35
变换技巧二:作用分解
原理示意图
扰动
P
电位器
ur u
ub -
电压 uk 放大器
可控硅 ua 直流 放大器 电动机
n
测速机
职能方块图
14:02
5
组成
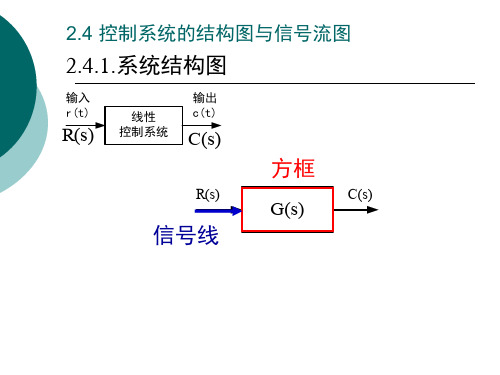
(1)信号线:带有箭头的直线,箭头表示信号的流向, 在直线旁边标有信号的时间函数或象函数。一条信 号线上的信号处处相同。
X(s)
(2)方框:表示对信号进行的数学变换,方框内的函 数为元件或系统的传递函数。
1
I(s) u(s)
C1s [u(s) uo (s)]
1 R2
I 2 (s)
1
I (s)
1 C1s
2-4 控制系统的结构图与信号流图
(t ) K1n(t ) x1 (t ) r (t ) c
( s)
R( s)
2005年1月10日
用梅逊公式求下图所示系统在R(s) 和 N(s) 同时作用下的输出C(s)
R( s)
G1 ( s ) G2 ( s )
N (s) C (s)
G1G2 G2 (1 G1 ) 1 G1 G2 G1G2 C ( s) R( s ) N ( s) 1 G1 G2 2G1G2 1 G1 G2 2G1G2
2.4.3 闭环控制系统的传递函数 N(s)
1 1
2 1 G2G3 H 2
P2 H4
例2.4.2 已知系统结构图如图,试求传递函数
H4(s) R(s) H1(s) + C(s)
G1(s) +
G2(s) H2(s) H3(s)
G3(s)
C (s) P 11 P 22 R( s)
G1G2G3 H 4 (1 G2G3 H 2 ) 1 H 3 H 4 G1G2G3 H 3 G2G3 H 2 G1H1 G2G3 H 2 H 3 H 4 G1G2G3 H1H 2
当H(s)=1时,为单位反馈系统,此时
Gc (s)G p (s) C ( s) ( s ) R(s) 1 Gc (s)G p (s)
R(s)+
N(s) Gc(s) 控制器 +
-
对扰动输入的传递函数
D ( s) G p ( s) 1 Gc (s)G p (s) H (s)
控制系统结构框架图

一.控制系统结构框架图数据总线由用于RS-485通信的双绞线和一根数据发送允许控制线——使能控制线组成。
示意图如下:二.数据总线原理当某个PL C 需向其他P L C 发送数据时,首先判断I 0.0是否为高电平,如果为高电平,说明总线处于空闲状态,那么首先将Q 0.0输出口导通,把使能找到的电平拉去,如果判断为低电平,则要一直要等到使能线上的电平为高时,才能发送数据,此种方法好处是每个单元都可作为主站或从站,串口数据由固定顺序的4个字节组成(数据1、数据2、数据3、数据4)主控板发送出的数据的含义数据1:主控板标志设定为0xaa数据2:电梯位于的楼层值数据3:电梯的运行方向数据4:电梯预到达的楼层楼层单元板发送数据的含义数据1:单元板标志设定为0x55数据2:乘坐者位于的楼层数据3:乘坐者预到的楼层数据4:乘坐者坐电梯的方向,向上运行设定为0x66,向下运行设定为0x99接受到数据后的运算处理:主控板PLC接收完成一组数据,首先判断数据4的值,若为0x66,时将数据2和数据3的值保存在VB2—VB6的存储器中,方法是:如果数据等于(a),则VB(a)=0×66,若为0×99,则将数据2和3的值保存在VB11—VB15.楼层单元板P LC接收完一组数据后,要先判断数据1的值,若为0xaa说明是主控P LC发来的数据,则把数据2和数据3送给显示模块,判断数据4的值,点亮相对应的指示灯,若为0x55,则说明是楼层单元PLC发来的数据,则判断数据2和数据3的值,点亮相对应的指示灯。
三.电梯运行状态的控制电梯上点后,首先进行自检,包括厅门是否关闭,车厢门是否关闭,电梯是否为于正确的楼层位置,然后电梯自动运行到都正常的状态,(厅门关闭、车厢门关闭,读取到正常的楼层信息)静止下来,等待命令电梯在静止状态时,接收到的楼层单元发来的信息,判断数据2的大小,如果小于电梯位于的楼层值,电梯向下运行,否则电梯向上运行,电梯在运行的状态下,实时接收各楼层单元发来的数据并进行相应的处理,向下运行时,不断检测VB11—VB15,存储器中的值,在到达对应的楼层时停靠,并清零对应的存储器的值,直至VB1为零,电梯暂停,系统开始判断V B2—VB6中是否有存储器的值为0x66,如果有时开始向上运行,到达相应的楼层。
2-3控制系统的结构图

N(s) N(s) N(s)
G2(s)
G2(s) G22(s) G (s) HH (s) 2 (s) H(s) 2 2
C(s) C(s) C(s)
HH (s) 1 (s) H(s) 1 1
H3(s)
H3(s) H33(s) H (s)
C(s)
G1(s)
R(s) E(S) P1= –G2H3 P1=1 H1(s)
2012-6-26
U(s) U(s) U(s)
U(s)
U(s)
U(s)±R(s)
R(s)
2-3控制系统的结构图
3
二、控制系统结构图的绘制(1)
控制系统结构图绘制步骤: 建立各元件微分方程组 确定各环节的输入输出量 按信号流向连接各环节框
拉氏变换方程组(考虑负载效应) 各环节框
2012-6-26
L1L4=(–G1H1)(–G4G3)=G1G3G4H1 2-3控制系统的结构图
梅逊公式求E(s)
G3(s) R(s) R(s) R(s) R(s)
P2= - G3G2H3 △2= 1 P2△2=?
G3 (s) E(S)G(s) G33(s) E(S) E(S) E(S) GG (s) 1 (s) G(s)
△△1= 1 2HH2(s)P1△1= ? 1=1+G 2
E(s)=
R(s)[ (1+G2H2) + (- G3G2H3) ] + (–G2H3) N(s)
2012-6-26
1 - G1H1 + G2H2
2-3控制系统的结构图
+ G1G2H3 -G1H1G2 H2
17
五、控制系统的传递函数
1.
2.3 控制系统的结构图方框图2
R(s)
E(s)
G(s)
- + B(s)
H(s)
(a)
C(s)
反馈连接
R(s) (b)
C(s)
上述三种基本变换是进行方框图等效变换的基础。对于 较复杂的系统,例如当系统具有信号交叉或反馈环交叉时,仅靠 这三种方法是不够的
信号相加点和信号分支点的等效变换
对于一般系统的方框图,系统中常常出现信号或反 馈环相互交叉的现象,此时可将信号相加点或信号分 支点作适当的等效移动,先消除各种形式的交叉,再 进行等效变换即可。
C(s) R(s) G1 (s) G2 (s) G3 (s) G(s)
G1(s) G2 (s)
C2 (s)
C1(s)
C(s)
G3 (s) (a)
C3 (s)
并联环节的等效传递函数等于
所有并联环节传递函数的代数和
n
G(s) Gi (s) n为相并联的环节数 i 1
(3)反馈连接 有缘学习更多+谓ygd3076考证资料或关注桃报:奉献教育(店铺)
奉献教育店铺对于一般系统的方框图系统中常常出现信号或反馈环相互交叉的现象此时可将信号相加点或信号分支点作适当的等效移动先消除各种形式的交叉再进行等效变换即可
第二章 线性系统的数学模型
2.3 控制系统的结构图/方框图
(2)并联连接
R(s)
G1(s)C1(s)源自C2 (s) G2 (s)
R(s)
C(s)
G3 (s)
C3 (s)
(a)
G(s) (b)
C(s)
并联连接的特点: 各环节的输入信号是相同的,均为R(s),
输出C(s)为各环节的输出之和。
C(s) C1 (s) C2 (s) C3 (s) G1 (s)R(s) G2 (s)R(s) G3 (s)R(s) R(s) [G1 (s) G2 (s) G3 (s)]R(s)