轮式移动机器人滑模轨迹跟踪控制
基于MPC的麦克纳姆轮移动平台轨迹跟踪控制

2023年第47卷第11期Journal of Mechanical Transmission基于MPC的麦克纳姆轮移动平台轨迹跟踪控制黄晓宇1,2孙勇智1,2李津蓉1,2王翼挺1,2杨颀伟1,2(1 浙江科技学院自动化与电气工程学院,浙江杭州310023)(2 浙江省机器人产业学院,浙江杭州310023)摘要针对麦克纳姆轮全向移动平台轨迹跟踪控制问题,提出了一种模型预测控制(Model Pre⁃dictive Control,MPC)和微分先行比例-积分-微分(Proportional plus Integral plus Derivative,PID)协同的双闭环控制策略。
基于麦克纳姆轮运动学特点,设计了位姿控制环和速度控制环;在位姿控制环建立麦克纳姆轮底盘的线性误差模型,设计二次型目标函数,将路径跟随问题转化为对非线性模型的预测控制;在速度控制环引入微分先行PID控制器,避免输入量频繁的阶跃变化对系统产生高频干扰,加快麦克纳姆轮的角速度收敛,增强了系统稳定性。
仿真实验表明,设计的控制器在收敛速度、跟踪精度方面均高于常见的轨迹跟踪器,对麦克纳姆轮移动平台的控制具有良好的鲁棒性。
关键词麦克纳姆轮轨迹跟踪线性误差模型模型预测控制微分先行PIDTrajectory Tracking Control of Mecanum Wheels Mobile Platform Based on MPC Huang Xiaoyu1,2Sun Yongzhi1,2Li Jinrong1,2Wang Yiting1,2Yang Qiwei1,2(1 School of Automation and Electrical Engineering, Zhejiang University of Science and Technology, Hangzhou 310023, China)(2 Key Institute of Robotics of Zhejiang Province, Hangzhou 310023, China)Abstract For the trajectory tracking control problem of the omnidirectional mobile platform of Mecanum wheels, a strategy of double closed-loop control with model predictive control (MPC) and differential forward proportional plus integral plus derivative (PID) is proposed. The attitude control loop and velocity control loop are designed based on the kinematics characteristics of Mecanum wheels. The linear error model of the Mecanum wheels chassis is established by the attitude control loop, the quadratic objective function is designed, and the problem of path following is transformed into predictive control for the nonlinear model. In the velocity control loop, the differential forward PID controller is used to avoid the high-frequency disturbance to the system caused by frequent step changes of the input quantity, accelerate the convergence of the angular velocity of the Mecanum wheels, and enhance the stability of the system. Simulation experiments demonstrate that the controller designed in this study has better convergence speed and tracking accuracy than the commonly used trajectory algorithm, and it can provide good robustness to control the mobile platform of Mecanum wheels.Key words Mecanum wheel Trajectory tracking Linear error model Model predictive control Dif⁃ferential forward PID0 引言随着计算机的应用和传感技术的发展,移动机器人技术在智能制造、工业物流等领域得到广泛应用[1-2]。
轮式机器人轨迹跟踪控制

轮式机器人轨迹跟踪控制摘要:轮式机器人是一种重要的移动机器人,其轮式设计极大地影响了其动力学特性和机器人控制。
在本文中,主要介绍了轮式机器人的轨迹跟踪控制方法,其中包括控制器设计和实现,以及控制器的测试和仿真结果。
本文提出的控制器可以实现对轮式机器人端到端的轨迹跟踪,同时具有良好的鲁棒性和适应性,不受外部干扰和模型误差的影响。
仿真结果表明,所提出的控制器可以实现快速而稳定的轨迹跟踪,同时满足精度和鲁棒性要求,具有很强的实用性和推广价值。
关键词:轮式机器人,轨迹跟踪,控制器设计,鲁棒性,适应性一、引言轮式机器人是一类重要的移动机器人,主要由轮子和运动控制系统组成。
它具有结构简单,灵活性强,能够适应不同的地形和环境等优点,因此被广泛应用于工业、安全和医疗等领域。
然而,由于轮式机器人的运动控制问题与普通固定机器人存在显著差异,如速度、加速度、转向等参数的控制,使得其控制与建模相对复杂,难度较大。
本文主要探讨了基于模型预测控制方法的轮式机器人轨迹跟踪问题。
初步分析了轮式机器人的运动学动力学特性,建立了数学模型。
然后,该模型被用作模型预测控制器的设计和实现,以实现对轮式机器人的精确跟踪控制。
此外,还构建了一种自适应容错控制器,以提高系统的鲁棒性和适应性,使得系统在面对外部干扰和模型误差等不确定因素时仍能在一定程度上保持性能。
二、轮式机器人建模轮式机器人的建模是轨迹跟踪控制的关键。
轮式机器人在平面内运动,基本运动自由度为平移和旋转,其在运动学和动力学特性方面具有一定特点。
2.1 运动学建模轮式机器人通常由两个驱动轮和一个支撑轮组成,利用运动学建模方法进行描述。
设轮式机器人的控制系统有两个麦克纳姆轮,分别设置在机器人的左右两边,分别为$W_l$和$W_r$,此外还有一个固定的轮$W_s$,如图1所示。
其中,$l_f$和$l_b$为机器人重心到前后轮轴的距离,$b$为两侧麦克纳姆轮之间的距离。
建模时,用$\theta$表示机器人的朝向,用$x$和$y$表示重心位置,以动学方程描述机器人的运动状态:\begin{equation}\begin{aligned}\dot{x} &= v\cos(\theta) \\\dot{y} &= v\sin(\theta) \\\dot{\theta} &= \frac{v}{l_f-l_b}(\tan(\alpha)W_r-\tan(\beta)W_l)\end{aligned}\end{equation}其中,$v$为机器人的线速度,实际上是两个驱动轮的平均速度,$\alpha$和$\beta$分别表示驱动轮轮速的方向和大小,可以由卡式雅各比矩阵表示:\begin{gather}\begin{bmatrix}v \\ \omega\end{bmatrix}=\begin{bmatrix}J_{11} & J_{12} \\ J_{21} & J_{22}\end{bmatrix}\begin{bmatrix}\dot{\alpha} \\ \dot{\beta}\end{bmatrix}\end{gather}可以得到卡式雅各比矩阵为:\begin{equation}\begin{aligned}J_{11} = \frac{1}{2}(\cos(\theta) -\frac{l_b}{l_f}\sin(\theta)) && J_{12} =\frac{1}{2}(\cos(\theta) + \frac{l_b}{l_f}\sin(\theta)) \\J_{21} = \frac{1}{2}(\sin(\theta) +\frac{l_b}{l_f}\cos(\theta)) && J_{22} =\frac{1}{2}(\sin(\theta) - \frac{l_b}{l_f}\cos(\theta)) \end{aligned}\end{equation}2.2 动力学建模针对轮式机器人的动力学建模,通常采用牛顿-欧拉方法,这种方法可以求解机器人的动力学运动方程。
基于自适应反步法的轮式移动机器人跟踪控制

当闭环 系统对性 能要求 比较高时 , 动力学描 述是不可忽视 其
的 。另外 , 于运 动学 模型的速度控 制律 不能直接 应用于输 基
十分复杂 。因其不满 足 Bokt必要 性条件 , 得光 滑 的状 rcet 使
态反馈控制律无 能为力 。于是 研究人 员针 对具 有重要 工 程 意义 的非完整移动机 器人 的跟踪 控制 提 出各种 控制方 法来 克服这一缺陷 。根据 系统是 由运动学 模 型或动力 学模 型来 描述 , 可将跟 踪控 制问题划分为运动学跟 踪或者动力 学跟踪 问题 。运动学跟踪 问题 近年来 已被 广泛研 究 。一 些学 者借 助线性控制理论 或反馈线性化 的方法 进行研究 , 包括 基于线 性化方法 为非 完 整 轮式 移 动 机 器 人提 出 了一 种 局部 控 制 器… , 于线性化模型 提出 了连 续 的线性 局部 指数 控制 器 , 基 基于动力学反馈 线性化 方法 和微 分平面 思想 提 出带有奇 异
1 引言
近年来 , 非完整移动机器人 的运 动控制一直 是人们研 究 的热 点。机器人是 一个 十分 复杂 多变 的多输 入多输 出 的非 线性 系统 , 具有强耦合 、 时变 和非 线性 的动 力学特性 , 其控 制
动力学 系统 跟踪问题在最近几年受到 越来越 多的关注 , 原 因之一是大 多数实 际的非完整机械系统 都是动力 学系统 。
控制器 , 有效解决了不确定非完整轮式移动机器人 动力学系统的轨迹跟 踪问题 。仿真结果证 明该方法 的正确性和有效性 。
关键词 : 移动机器人 ; 非完整约束 ; 自适应反步 ; 跟踪控制
中图 分 类 号 :P1 _ 3 r 文 献 标 识 码 : A
Ada i e Ba kse pi g Tr c i g Co t o fW he ld M o ie Ro t ptv c t p n a k n n r lo ee b l bo
轮式移动机器人轨迹跟踪控制方法

j Y =一 ( , 一 ) s i n 0 +( Y 一 Y ) c o s 0
【
收 稿 日期 : 2 0 1 3 — 1 2 — 1 9
( 3 )
0 = 0 , 一0
作者简介 : 吴 忠伟( 1 9 8 5 一 ) , 女, 山东 日照人 , 助教 , 硕士, 主要从事计算机控制方 面的研 究。
( V r O . ) , ) 来表示 。从位置p移动到 目标位置 p 产生了一个新 的坐标系 X 一 , 令移动机器人的坐标为
其中 0 。 = 0 一0 。设 新 坐标 系 一 与 坐标 系 —l , 之 间 的夹角 即为 0 。利用 坐标 变换 得 到 :
r =( , 一 ) c o s 0+( Y 一 Y ) s i n 0
摘
电气信息 系 ,长春
1 3 0 1 1 1 )
, , ∞ C , . . .
要: 针 对 轮 式 移 动 机 器人 轨 迹 跟 踪 这 一 典 型控 制 任 务 , 提 出 了基 于模 糊 控 制 规 则 的 滑 模 控 制 方 法 。 该 方 法 采
用等速趋 近律 , 利用连续 函数代替符号 函数获得切换控 制律 , 最后运 用 L y a p u n o v理论 证明 系统的稳 定性。仿 真结 果表 明该方法不但 能够有效的跟踪机器人的参考轨迹 , 还 能有效的减少在控 制 中的抖振 现 象。即使存 在外界 干扰
神 经预 测控 制方 法实 现 四轮移 动机 器人 的轨 迹 跟踪 ; 在 实 际 的控 制 系 统 中往 往 会 存 在 不 确定 的外 界 干 扰 。 由于滑模 控 制器设 计 简单 、 鲁棒 性较 强等 优点 , 在解 决非 线性 系统 问题 上具 有 良好 的控 制 效果 。 本 文在 考虑 轮式 移动 机器 人模 型 的基 础 上 , 设 计具 有 渐近 稳定 性 的滑模 控 制 律 。利 用 连续 函数 替代 符 号 函数 的方 式消 除抖 振现 象 。通过 机器 人给 定 的圆形轨 迹 的跟 踪仿 真 , 证 明该控 制方 法 的有效 性 。
基于RBF神经网络的轮式移动机器人轨迹跟踪控制

燕 徐 云 龙 ,
(.金 陵科 技 学 院 信 息技 术 学院 ,江 苏 南京 2 16 ; 2 1 11 9 .南京理 工 大 学 自动化 学院 ,江 苏 南京 2 0 9 ) 10 4
摘 要 : 对 一类 非完整 移动机 器人 的轨 迹跟 踪控 制 系统 , 出一种 基 于 R F神 经 网络 的滑模 控制 与转 矩控 制相 结合 的智 针 提 B
c mb n t n o l i g mo ec n r l n r u o t l a e n RBF n u a ewo k d c n r 1 Co sd r g b t i e t n y a o i ai f i n - d o to dt q e c n r s d o o sd a o o b e rl t r e o t . n o n i e i oh k n mai a dd n — n c m ia d l t eRBF n u a e o k a n t ep o e so mo i b t o in, a d c n t u e r u o to lrc mb n d wi e cl mo e , h e l t r sl r r c s f b l r o t r nw e h eo m o n o si t sat q ec n l o i e t t t o r e h h s e d er r T e n f r y u t t l s m p o i tb l y o t eco e o ro se c rb b an d Th tb l y o e t ec o e p e ro . h i ml l ma ey a y t t s i t f l s d l p e r rs t m al eo t i e . u o i c a i h o y e s i t f n i l s d a i r l o y tm r v db y p n v s b l y t e r . Th i l t n r s l e n tae t a i c n o tae y h sg o b sn s . o p s se i p o e y L a u o t i t o s a i h y esmu ai u t d mo sr t t s o t l r tg a o dr u t e s o e s h t r s h o
基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制
第51卷第3期2021年5月吉林大学学报(工学版)Journal of Jilin University (Engineering and Technology Edition)V o l. 51 N o. 3M a y 2021基于扰动观测器的轮式移动机器人滚动时域路径跟踪控制于树友“2,常欢2,孟凌宇2,郭洋2,曲婷1(1.吉林大学汽车仿真与控制国家重点实验室,长春130022;2.吉林大学通信工程学院,长春130022)摘要:轮式移动机器人路径跟踪控制问题中通常存在状态约束和输入约束,并且系统运行时 容易受到外部扰动的影响。
本文基于非线性扰动观测器提出了一种轮式移动机器人滚动时域 路径跟踪控制策略。
当没有外部扰动作用于系统时,滚动时域控制算法可以满足控制约束和 状态约束,并且使得轮式移动机器人跟踪期望的轨迹;当存在外部干扰,尤其是慢变扰动时,非线性扰动观测器能够估计扰动,并通过反馈补偿扰动对轮式移动机器人移动轨迹的影响。
仿 真结果表明,在外部干扰存在的情况下该控制策略能够保证移动机器人渐近跟踪期望路径。
关键词:自动控制技术;轮式移动机器人;路径跟踪问题;扰动观测器;滚动时域控制中图分类号:T P273 文献标志码:A文章编号:1671-5497(2021)03-1097-09D O I:10. 13229/ki.j d x b g x b20200065Disturbance observer based moving horizon control for pathfollowing problems of wheeled mobile robotsY U S h u-y o u12,C H A N G H u a n2,M E N G L i n g-y u2,G U O Y a n g z,Q U T i n g1(1. S ta te K e y L a b o r a to r y o f A u to m o tiv e S im u la tio n a n d C o n tro l ^J ilin U n i v e r s i ty C h a n g c h u n130022, C h in a;2. C o lle g e o f C o m m u n ic a tio n E n g in e e r in g, J ilin U n iv e r sity y C h a n g ch u n130022, C h in a)Abstract:State constraints,input constraints and external disturbances usually exist in the path following problem of w h e e l e d mobile robots.Ba s e d o n nonlinear disturbance observer,a m o v i n g horizon control strategy for path following p r o blem of wheeled mobile robots is proposed in this paper.W h i l e there is n o disturbance at all,the m o v i n g horizon control can satisfy the input and state constraints,and drive the w h e eled mobile robot to the desired path.W h i l e there are disturbances,in particular,slow varying and “big”disturbances,the proposed nonlinear disturbance observer can estimate the disturbances,and c o m p ensate the influence of the disturbances o n the w h e e l e d mobile robot through a feedback.Simulation results s h o w that the proposed control strategy can guarantee the convergence of the mobile robot to the desired path under the external disturbance.收稿日期:2020-02-10.基金项目:国家自然科学基金项目(U1964202,61703178);江苏省新能源汽车动力系统重点实验室开放课题项目(JKLNEVPS201901).作者简介:于树友(1974-),男,教授,博士 .研究方向:预测控制,鲁棒控制.********************.cn通信作者:曲婷(1982-),女,副教授,博士 .研究方向:汽车动力系统控制及驾驶员行为建模.E-mail :**************.cn•1098 .吉林大学学报(工学版)第51卷Key words:automatic control technology;w h e eled mobile robot;path following p r o b l e m;disturbance observer;m o d e l predictive control〇引言轮式移动机器人(W h e e l e d mobile robot,W M R>是典型的非完整约束系统由于Brockett 条件11的存在,不能获得连续可微、线性时不变的 反馈控制律镇定轮式移动机器人系统。
基于神经动力学的轮式移动机器人跟踪与稳定统一控制

Uni f i e d c o nt r o l o f t r a c ki ng a nd s t a b i l i z a t i o n f o r W M R b a s e d o n
b i o — i n s p i r e d n e u r o d y n a mi c s
bu s t a nd s t a bl e mo de s,t he p r i nc i pl e o f t he b i o — i ns pi r e d d yn a mi c s wa s a na l yz e d,t he no nl i n e a r Mo de l
*C【 ) r r e s p o n d i n g a u t h o r,E - ma i l j u t k j w@y a h o o . C O m. c n
Ab s t r a c t : To t r a c k a n d c o n t r o l t h e t r a j e c t o r y o f a Wh e e l e d Mo b i l e Ro b o t( W MR)i n t h e s mo o t h,r o —
YI N Xi a o — h o n g,YANG Ca n ,KAN J u n — wu ,CHENG Gu a n g — mi n g
( I n s t i t u t e o f Pr e c i s i o n Ma c h i n e r y,Z h e j i a n g No r ma l Un i v e r s i t y,J i n h u a 3 2 1 0 0 4,Ch i n a)
b i l i t y i n i n f o r ma t i o n p r o c e s s i n g t o o v e r c o me t h e v e l o c i t y j u mp i s s u e i n t h e t r a d i t i o n a l c o n t r o l me t h o d .
移动机器人滑模跟踪控制

移动机器人滑模跟踪控制针对移动机器人动力学模型,通过线性解耦,将该线性耦合系统解耦成两个独立的子系统,使用积分滑模来实现滑模函数的设计,进行相应的稳定性分析。
标签:线性解耦;积分滑模;控制器设计Abstract:According to the dynamic model of mobile robot,the linear coupling system is decoupled into two independent subsystems by linear decoupling,and the sliding mode function is designed using integral sliding mode,and the corresponding stability analysis is carried out.Keywords:linear decoupling;integral sliding mode;controller design1 介绍移动机器人可通过移动来完成一些比较危险的任务,如地雷探测、海底探测、无人机驾驶等,在科研、工业、国防等很多领域都有实用价值。
然而,移动机器人是一个多变量、强耦合的欠驱动系统,难以对其进行高性能轨迹跟踪控制。
本文针对移动机器人动力学模型,通过线性解耦将其转化为两个独立的子系统,分别针对子系统设计了滑模跟踪控制。
仿真结果表明,该控制系统能够快速跟踪给定的线速度和参考角度,在工程上有一定的应用价值。
2 动力学模型2.1 移动机器人动力学模型的建立假设两轮独立驱动刚性移动机器人在平面内移动,如图1所示,两个前轮各采用直流伺服电机驱动,通过调节输入电压实现驱动轮的速度差。
假设绝对坐标OXY固定在平面内,则移动机器人动态特性可用动力学方程来描述。
对于车体,根据力矩平衡原理,车体转动角度=右轮主动力矩-左轮阻力矩,即(1)根据牛顿定律,得(2)其中:Iv为绕机器人重心的转动惯量,Dr和Dl分别为左右轮的驱动力,l 为左右轮到机器人重心的距离,?准为机器人的位姿角,v为机器人的线速度。
轮式移动机器人轨迹跟踪控制算法的研究

wa r s n e o s n h sz n a g e b a c lt g t e d v ai n o o h a g e a d p st n b t e n t e rb t e l t o ain a d s p e e t d t y t e ie a n l y c l u ai h e i t f b t n l n o i o e w e h o o r a— i l c to n n o i S me
合成一个角度 , 然后对该 角度进行了 PD调节 ; I 在实验 中, 将直线 、 圆弧轨迹跟踪算法实 际运 用于机器人的运动控制 。研究结果 表 明, 该算法能将机器人轨迹的偏差有效地控制在± m以内。 lc 关键 词 :轮式移动机器人 ; 轨迹 跟踪 ; 算法 ; 比例一 积分一 微分调节 中图分类号 : P 4 ; H13 T 2 2 T 1 文献标志码 : A 文章编号 :0 14 5 (0 2 0 — 7 0 0 10 — 5 12 1 )6 0 3 — 3
Ke o d : hee bl rbtt jc r t c i ;l rh po o i —nerld r a v( I cnrl yw r s w eldmoi oo;aety r kn a o tm;rp ro i ga ei te PD) ot e r o a g gi tn t — vi o
轮式移动机器人轨迹跟踪控制的特点与方法
1、前 言
由于具有操作快捷 、 控制简单 , 并且节省能量等特点 , 轮式移动 机器人成为了用途最广泛的一类移动机器人 。 近些年来对轮式移动 机器人的研 究越 来越得到关注。 轮式移动机器 人控制的两个主要 问 题是 : 轨迹跟踪控制和点稳定控制。 虽然点稳定控制 问题在理论上 很难解 决 , 但是在实践 中的应用并不广泛 。 式移动机器人 的控制 轮 算法通常是在一个预先设定好的无障碍的路径 的基础上 工作 的。 因 此, 在实 际上轨迹跟踪控制 问题得到 了广泛的关注 。 移动机器人 的 轨迹跟踪控 制问题是控制机器 人跟踪一个 给定 的、 时变的轨迹。 一 般来说 , 目的是使机器 人能够在每一个采样周期上 以特定的姿态 其
控制算法 。 出的离散控制算法克服了以往的基于时间连续模型所 提 设计的连续控制器在数字控制器上执行所 需的小采样周 期的问题。 22动 力 学轨迹 跟踪 控 制 . 在机器人速度较低且载重不大 的情 况下, 基于运动学模型设计 的控制策略可以得到 比较满意 的控制效果 。 然而在机器人高速 的运 动或高负重运动 的情况下 , 只考虑运动学问题而忽略 了动力学方程 中的系统质量和惯性 会使得控制效果不理想 。 因此 , 在这种情况下 在移动机器人 的轨迹 跟踪控制 中基于动力学方程设计的控制器会 取得 更好 的控 制效果。 文献【提 出了一种 自适应 非线性控制器 , 3 ] 并 且通过实验验证 了该控制方法 的有效性 。 在文献[] 4中一种指数滑模 控制 方法 被提 出, 该方法具有很好 的鲁棒性 。 23移 动机 器人轨 迹跟 踪控 制 中常 见 的 问题 . 以上提出的控制方法大都是基 于理想情况所设计的。 但是在实 际中往往不能满足此理想情况。 些时候特别是当载重运输时 , 有 机器
轮式移动机器人

首先,阐述了全向轮式移动机器人的结构设计特点,利用坐标变换方法建立移动机 器人的运动学和动力学模型,根据全向轮式移动机器人的运动特性选择了基于运动学模 型分层控制作为其轨迹跟踪控制的设计方案。
其次,以全向轮式移动机器人的运动学模型作为控制对象,以线速度和角速度为控 制输入,设计了几种控制器并通过仿真验证了设计方法的正确性。(1)设计了模糊控制器 对全向轮式移动机器人进行轨迹跟踪控制,实现了对期望轨迹的跟踪控制。(2)为了提高 系统的鲁棒性,设计了滑模变结构控制器,有效的克服外界不确定的干扰,并进行了相 应的仿真证明设计的有效性和可行性。(3)为了减弱滑模变结构控制器中的抖振,采用了 连续函数代替了原来的符号函数,设计了准滑模控制器,通过仿真证明其能够很好的减 弱抖振。
有些学者将遗传算法和模糊算法相结合设计出移动机器人轨迹跟踪控制器但是由于模糊控制算法的自适应能力差对移动机器人的轨迹跟踪控制效果并不理想3031滑模变结构控制法滑模变结构控制的思想是针对不同移动机器人的模型表达式设计一个适当状态空间曲面称为滑模面在此基础上利用高速的开关控制律驱动非线性系统的状态轨迹渐近地到达预先设计的滑模面并且在以后的时间状态轨迹将保持在该滑动表面上以实现期望轨迹的跟踪
最后,对本文所做的工作进行总结,并提出展望,指出有待进一步研究的方向和问 题。
关键词:移动机器人;轨迹跟踪;模糊控制;滑模控制
-II-
轮式机器人移动过程中滑模控制策略的研究

2021年5月第28卷第5期控制工程Control Engineering of ChinaMay. 2021Vol.28, No.5文章编号:1671-7848(2021)05-0963-08DOI: 10.14107/ki.kzgc.20190635轮式机器人移动过程中滑模控制策略的研究陈勇\刘哲\乔健、卢清华、谢永芳2(1.佛山科学技术学院机电工程与自动化学院,广东佛山528225;2.中南大学自动化学院,湖南长沙410083)■摘要:针对移动机器人的路径跟踪控制问题,提出了一种全局稳定定理与指数趋近律相 结合的滑模控制方法。
在控制器的设计中,定义了惯性坐标系和机器人坐标系,建立移动机器人运动模型,标定出位置误差和姿态角误差;基于指数趋近律设计了移动机器人的轨迹跟踪控制器,利用全局穗定定理改进了控制器的控制律算法,通过L y a p u n o v函数证明了控制器的稳定性;最后采用双环闭环控制结构对此路径跟踪系统进行了 M A T L A B仿真,并与传统指数控制律设计的控制器进行对比。
结果表明,该方法提高了机器人在路径跟踪过程中线速度与角速度的穗定性,削弱了指数控制律的抖振现象,验证了新指数控制律设计的轨迹跟踪控制器的可行性与有效性。
关键词:轮式移动机器人;滑模控制;路径跟踪;指数趋近律;全局穗定中图分类号:T P242 文献标识码:AResearch on Sliding Mode Control Strategy of Wheeled Robot in Moving ProcessC H E N Yong\ L I U Z h e\ Q I A O Jian2,L U Qing-hua2,X I E Yong-fang3(1.School of Mechatronic Engineering and Automation,Foshan University,Foshan528225, China;2.Schoolof A utomation,Central South University,Changsha410083, China)Abstract:A i m i n g at solving the problem of path tracking control of mobile robot,a sliding m o d e control method is proposed combined with global stability and exponential reaching law.In the design of the controller, the inertial coordinate system and robot coordinate system are dfined firstly.T h e kinematic mod e l of mobile robot is developed,the position error and attitude angle error are calibrated.T h e path tracking controller for mobile robots is designed b y the exponential reaching law,and the control law algorithm i s improved b y global stability theorem,and Lyapunov function i s used to prove the controller stability.Finally,the double closed-loop control structure is used to simulate the path tracking system in M A T L A B,and the comparison is m a d e with the controller designed by the traditional exp-onential control law.T h e results s h o w that the stability of linear velocity and angular velocity of the robot in the path tracking process is improved and the chattering of exponential control law is w e a k e n e d by the proposed m e t h o d.T h e feasibility and effectiveness of the pathing tracking controller designed b y the n e w exponential control law are verified.K e y w o r d s:Wheeled mobile robot;sliding m o d e control;trajectory tracking;exponential reaching l a w;global stabilityi引言移动机器人具有结构简单、运动灵活、易于控 制等特点[1],在工业、服务业等领域得到广泛应用。
轮式移动机器人轨迹跟踪的pid控制方法

轮式移动机器人轨迹跟踪的pid控制方法随着轮式移动机器人自主导航技术的发展,轨迹跟踪成为了一个重要的问题。
PID控制器是一种常用的控制器,在轮式移动机器人的轨迹跟踪中也有着广泛的应用。
本文将介绍一种基于PID控制的轮式移动机器人轨迹跟踪方法。
首先,我们需要确定轮式移动机器人的轨迹跟踪目标,即期望路径。
一般情况下,期望路径可以是一条直线或者一条曲线。
在本文中,我们以一条曲线为例进行说明。
其次,我们需要获取轮式移动机器人的当前位置信息。
这可以通过机器人上安装的传感器实现,如GPS、陀螺仪等。
在获取到当前位置信息后,我们需要将其与期望路径进行比较,得到偏差值。
然后,我们利用PID控制器对偏差值进行控制,从而使机器人能够跟随期望路径行驶。
PID控制器的输入是偏差值,输出是校正量,其计算公式如下:
校正量 = Kp ×偏差值 + Ki ×积分项 + Kd ×导数项
其中,Kp、Ki、Kd是PID控制器的参数,需要通过实验进行调整。
积分项和导数项分别表示偏差值的累积量和变化率,可以有效地消除偏差值的漂移和抖动。
最后,我们将校正量转化为机器人的控制指令,如电机驱动信号。
这样,机器人便可以根据PID控制器的输出实现轨迹跟踪。
综上所述,基于PID控制的轮式移动机器人轨迹跟踪方法能够实现精准的路径控制,具有较高的应用价值。
机器人轨迹跟踪控制原理

机器人轨迹跟踪控制原理引言:在现代工业生产中,机器人已经成为不可或缺的重要设备。
机器人的轨迹跟踪控制是机器人运动控制的关键技术之一。
它能够使机器人根据预定的轨迹进行准确的运动,实现各种复杂任务。
本文将介绍机器人轨迹跟踪控制的原理和应用。
一、轨迹跟踪控制的概念和意义轨迹跟踪控制是指机器人在运动过程中,按照预定的轨迹进行准确的运动控制。
它可以使机器人在复杂的环境中实现精确的位置和姿态控制,完成各种工业任务。
轨迹跟踪控制技术的应用领域非常广泛,包括制造业、物流业、医疗领域等。
它能够提高生产效率,降低人力成本,提高产品质量。
二、轨迹跟踪控制的原理1. 传感器采集数据:机器人通过激光雷达、视觉传感器等设备采集环境信息和自身状态信息,例如位置、速度、姿态等。
2. 轨迹生成:根据任务需求,通过算法生成机器人需要跟踪的轨迹。
轨迹可以是简单的直线、圆弧,也可以是复杂的曲线和多段轨迹的连接。
3. 控制器设计:设计合适的控制器来实现轨迹跟踪控制。
常用的控制方法包括PID控制、模糊控制、神经网络控制等。
控制器根据当前位置和目标位置的差异,计算出合适的控制指令,控制机器人执行相应的动作。
4. 执行控制指令:机器人根据控制指令执行相应的动作,例如调整关节角度、改变速度和方向等。
5. 闭环控制:通过传感器不断采集机器人的状态信息,与控制器中预先设定的目标状态进行比较,不断修正控制指令,使机器人能够更加准确地跟踪轨迹。
三、轨迹跟踪控制的应用1. 制造业:机器人轨迹跟踪控制在制造业中起到了重要的作用。
例如,在汽车制造过程中,机器人需要按照预定的轨迹进行焊接、喷涂等工艺,确保产品的质量和一致性。
2. 物流业:机器人轨迹跟踪控制可以应用于仓库货物的搬运和分拣。
机器人能够按照预定的轨迹准确地将货物从一个位置移动到另一个位置,提高物流效率和准确性。
3. 医疗领域:机器人在医疗领域的应用也越来越广泛。
例如,手术机器人可以按照预定的轨迹进行手术操作,提高手术的精确度和安全性。
《2024年非完整移动机器人路径规划与轨迹跟踪控制的研究》范文

《非完整移动机器人路径规划与轨迹跟踪控制的研究》篇一一、引言随着人工智能技术的不断发展,移动机器人成为了机器人领域研究的热点之一。
其中,非完整移动机器人因为其运动特性和广泛应用场景,受到了广泛的关注。
然而,由于非完整移动机器人的运动约束和复杂环境的影响,其路径规划和轨迹跟踪控制仍然面临诸多挑战。
本文将重点研究非完整移动机器人的路径规划与轨迹跟踪控制,以期为机器人的智能化和自主化提供支持。
二、非完整移动机器人概述非完整移动机器人是一种运动约束较为特殊的机器人,其运动状态受限于非完整约束条件。
常见的非完整移动机器人包括轮式机器人、履带式机器人等。
由于非完整约束的存在,非完整移动机器人的运动轨迹和姿态控制相对较为复杂。
因此,对非完整移动机器人的研究具有重要意义。
三、路径规划技术研究路径规划是非完整移动机器人研究中的重要一环。
本部分将详细介绍路径规划的相关技术。
首先,全局路径规划是机器人根据环境信息规划出一条从起点到终点的全局路径。
这一过程中,需要考虑到环境因素、机器人的运动特性等因素。
目前常用的全局路径规划算法包括随机路标图算法、网格法等。
这些算法可以在已知环境信息的情况下,为机器人规划出较为平滑且高效的路径。
其次,局部路径规划则是在机器人实际运动过程中,根据实时环境信息调整其运动轨迹的过程。
这一过程中,需要考虑到机器人的运动约束、实时环境感知等因素。
常见的局部路径规划算法包括基于控制的方法、基于优化的方法等。
这些算法可以根据实时环境信息,为机器人提供更加灵活的路径规划方案。
四、轨迹跟踪控制技术研究轨迹跟踪控制是非完整移动机器人的另一重要研究方向。
本部分将详细介绍轨迹跟踪控制的相关技术。
首先,传统的轨迹跟踪控制方法主要基于PID控制算法、模糊控制算法等。
这些方法虽然可以实现对机器人的基本控制,但在面对复杂环境和多变任务时,其控制效果并不理想。
因此,研究人员开始尝试引入更先进的控制算法,如基于优化算法的轨迹跟踪控制方法等。
轮式移动机器人全局轨迹跟踪控制

来ꎬ 大量学者从事这方面的研究工作ꎮ 文献 [1 ] 采
结合 Backstepping 方法设计了基于移动机器人运动
ห้องสมุดไป่ตู้
对滑动干扰鲁棒ꎮ 文献[2] 由移动机器人在极坐标
文献[7] 提出了一种改进的非线性反推跟踪控制算
系中的运动学方程出发设计一个滑模控制器ꎬ 进而
法ꎬ 并引入了一个反馈控制律ꎮ 然而ꎬ 文献[1 ̄7] 可
王屹华(1975) ꎬ 本科ꎬ 研究员级高级工程师ꎬ 研究方向为火炮全数字化智能控制技术ꎮ
1期
107
赵 涛等: 轮式移动机器人全局轨迹跟踪控制
计前向推力的控制律ꎬ 使位置跟踪误差全局一致渐
近稳定ꎬ 同时可以容易地获得航向角跟踪误差的全
局指数稳定控制律ꎬ 从而证明了轨迹跟踪误差的全
式中: ( x r y r θ r ) T 为轮式移动机器人的参考位姿
trajectory tracking effect greatly. Moreoverꎬ the close loop system has great dynamic characteristics and
global stability. The proposed method can apply to the global trajectory tracking control for wheeled mobile
相结合的控制方法ꎮ 文献[5] 运用 Lyapunov 方法和
自适应技术设计了一种自适应统一控制器ꎬ 该控制
迹跟踪控制问题越来越受到了人们的关注ꎮ 长期以
器可以保证跟踪误差全局一致最终有界ꎮ 文献[6 ]
用 Lyapunov 重设计方法设计修正项ꎬ 使得闭环系统
基于广义扩张状态观测器的移动机器人轨迹跟踪控制

基于广义扩张状态观测器的移动机器人轨迹跟踪控制张玲【摘要】针对复杂环境下轮式移动机器人(WMR)工作时受参数不确定性以及未知外部扰动的问题,提出一种基于扩张状态观测器的移动机器人轨迹跟踪控制方法.首先推导了轮式移动机器人的运动学及动力学模型,在此基础上引入广义扩张状态观测器(GE-SO)的控制策略对系统未知状态及不确定项进行实时估计与补偿,实现了系统对扰动的鲁棒性和对环境的高度适应性.并利用Lyapunov理论证明了系统的稳定性.仿真实验验证了所提出的控制方法能使移动机器人系统具有良好的跟踪控制性能和较强的鲁棒性能.【期刊名称】《高技术通讯》【年(卷),期】2019(029)006【总页数】7页(P607-613)【关键词】轮式移动机器人(WMR);轨迹跟踪;广义扩张状态观测器(GESO)【作者】张玲【作者单位】重庆工业职业技术学院智能制造技术学院重庆401120【正文语种】中文0 引言随着轮式移动机器人(wheeled mobile robot, WMR)应用领域的不断拓展,移动机器人越来越多地被应用于未知的复杂环境。
由于复杂工作环境的不确定性和复杂性,移动机器人的控制系统在抗干扰能力和实时性等方面都面临着巨大的挑战[1],这对系统的运动控制提出了更高的要求。
轨迹跟踪控制是实现轮式移动机器人自主移动的关键。
为解决非完整移动机器人的轨迹跟踪问题,张扬名等人[2]以移动机器人的运动模型为基础,提出一种基于滑模变结构的移动机器人轨迹跟踪控制方法。
文献[3]结合Backstepping方法设计了基于移动机器人运动学模型的轨迹跟踪控制律。
由于移动机器人受外部干扰、摩擦、负载变化等不确定因素的影响,基于运动学模型的轨迹跟踪对机器人的轨迹跟踪效果不理想。
近年来,越来越多的研究工作致力于从动力学层面解决轨迹跟踪问题,主要是将运动学控制器与动力学控制器相结合来解决移动机器人轨迹跟踪控制过程中存在的不确定性问题。
轮式移动机器人轨迹跟踪的pid控制方法

轮式移动机器人轨迹跟踪的pid控制方法轮式移动机器人是一种常见的移动机器人,其行动方式类似于小车,通过轮子的转动来实现移动。
轮式移动机器人的轨迹跟踪是其重要的控制问题之一,PID控制方法是常用的控制方法之一。
PID控制方法是一种基于反馈的控制方法,其主要思想是通过对系统输出与期望值之间的误差进行反馈控制,来调整系统输入,使得系统输出能够接近期望值。
PID控制器包括三个部分:比例控制器、积分控制器和微分控制器。
比例控制器根据误差的大小来调整输出,积分控制器根据误差的积分来调整输出,微分控制器根据误差的变化率来调整输出。
对于轮式移动机器人的轨迹跟踪问题,可以将其看作是一个控制问题,即通过调整机器人的轮子转速来使其行进的轨迹接近期望轨迹。
具体来说,可以将期望轨迹表示为一系列的路标点,机器人需要沿着这些路标点行进。
对于每个路标点,可以计算出机器人当前位置与期望位置之间的误差,然后通过PID控制器来调整机器人的轮子转速,使得误差逐渐减小,最终达到期望位置。
具体的PID控制方法如下:1. 比例控制器:根据当前误差计算出比例项,即误差乘以一个比例系数Kp,得到比例输出。
2. 积分控制器:将误差进行积分,得到积分项,即误差积分乘以一个积分系数Ki,得到积分输出。
3. 微分控制器:将误差进行微分,得到微分项,即误差变化率乘以一个微分系数Kd,得到微分输出。
4. 将比例输出、积分输出和微分输出相加,得到总输出。
5. 将总输出作为机器人的轮子转速,使机器人向期望位置移动。
需要注意的是,PID控制器中的比例系数、积分系数和微分系数需要根据具体的控制问题进行调整,以达到最优的控制效果。
总之,PID控制方法是一种常用的控制方法,可以应用于轮式移动机器人的轨迹跟踪问题中。
通过合理地调整比例系数、积分系数和微分系数,可以实现机器人的精准控制,使其沿着期望轨迹行进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 移动机器人轨迹跟踪模型
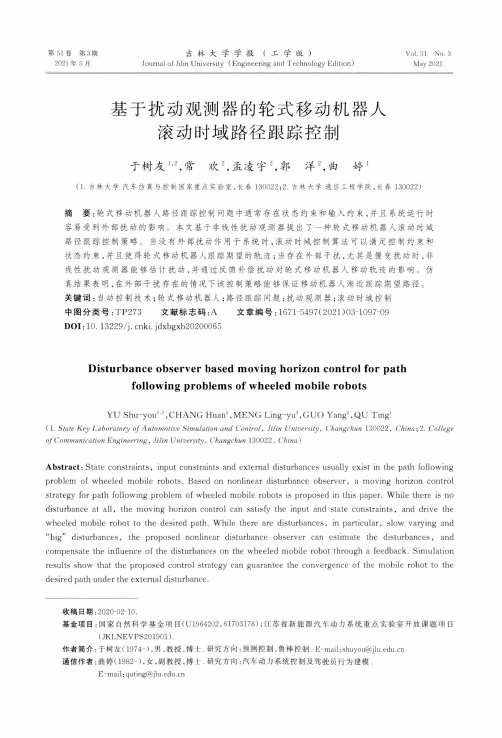
本文研究的 WMR 两个较大的后轮为驱动轮 ,前端有一 个可以绕固定轴自由旋转的小脚轮 ,如图 1 所示.
图 1 移动机器人模型 Fig. 1 The mode of WMR
WMR 的状态由其质心 C 在 X - Y 坐标系中的位置及航向θ来表示 ,令 p = ( x yθ) T , q = (νω) T ,其
θr = ωrt = t .
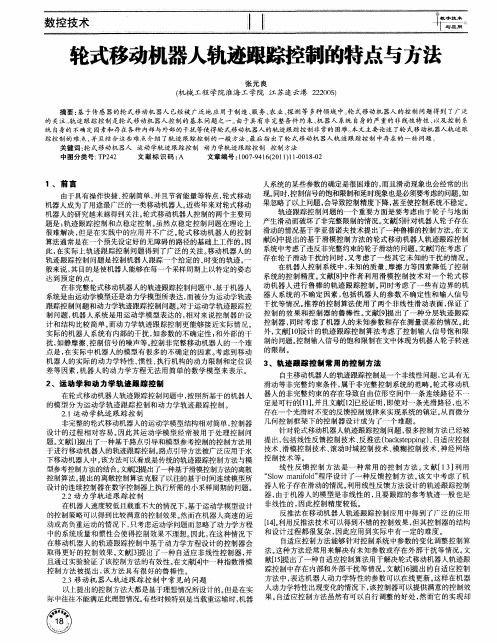
取 δ1 = δ2 = 0. 02 , k1 = 3. 0 , k2 = 6. 0 ,位姿误差初始值为[3 0 0 ] ,仿真结果如图 3 ~ 5 所示.
图 3 位姿误差变化曲线图 Fig. 3 Time history of t he posture errors
(νr
si
nθe
+
hωrco sθe)
+
k2 |
s2
s2 | + δ2
,
(5)
1 + 55αye xe + h
其中
5α 5νr
=
-
1
+
ye
(νrye)2来自,5α 5 ye
=
1
+
νr (νrye)
2
.
至此完成了 WMR 的滑模轨迹跟踪控制器的设计 ,上述结果以定理的形式表达如下 :
定理 1 对 Π t ∈[0 , + ∞) ,在滑模轨迹跟踪控制律 (5) 的作用下 ,由方程式 (3) 描述的运动学轨迹
WMR ( Wheeled Mobile Robot) 具有广阔的活动空间 ,被广泛的应用于工业 、农业 、医疗 、水下 、空间 、采 掘 、服务 、娱乐 、军事等领域 ,把人们从繁重的体力劳动和危险的工作环境中解放出来 ,从而提高了劳动生 产率 ,产生了巨大的经济效应.
由于 WMR 是典型的高度非线形的非完整力学系统 ,不满足 Brockett 光滑镇定的必要条件[1 ] ,因而不 能用光滑或连续的时不变状态反馈来实现其轨迹跟踪控制 ,这便使得不连续的滑模跟踪控制方法更具吸 引力[2~5 ] . 文献[ 6 ]采用基于积分 backstepping 时变状态反馈方法 ,引入具有双曲正切特性的虚拟反馈量 , 设计轨迹跟踪控制方法 ,并且利用 Lyapunov 方法证明系统的全局稳定性 ,并实现了轨迹跟踪控制. 文献 [ 7 ,8 ]基于后退 (backstepping) 方法的思想设计了具有全局渐进稳定的跟踪控制器 ,也实现了轨迹跟踪控 制. 以上文献中 ,控制律的研究针对的都是标准的两轮驱动的移动机器人 ,即质心和几何中心重合的移动 机器人. 在大多数情况下 ,WMR 的质心和几何中心是不重合 的. 文献[ 9 ]针对模型的质心和几何中心不重合的情况 ,利用 时变连续控制律解决了移动机器 、人的镇定控制问题 ,并且利 用自适应技术解决了 2 者之间距离未知时的镇定问题 ,但没 有实现轨迹的跟踪控制.
ki |
si
si | + δi
,
i = 1 ,2.
其中 δi 为正小数.
令 α = arctg (νrye) ,由式 (3) 和式 (4) 得
66
云南大学学报 (自然科学版) 第 29 卷
s1
-
k1 |
s1
s1 | + δ1
xe
yeω - ν +νrcosθe - hωrsinθe
ye = - xeω - hω +νrsinθe + hωrcosθe .
(3)
θ
ωr - ω
WMR 运动学模型的轨迹跟踪即寻找控制输入 q = (ν
图 2 位姿误差示意图 Fig. 2 The sketch map of posture error
ω) T , 使对任意的初始误差 ,系统式 (3)
摘要 :对质心与几何中心不重合的轮式移动机器人轨迹跟踪问题进行了研究. 分析了轮式移动机器人运动 学的数学模型 ,并在反演 (backstepping) 控制算法的基础上设计了变结构控制的切换函数 ,由此构造了具有全 局渐进稳定性的滑模跟踪控制器. 仿真结果表明了该方法的有效性和正确性.
关键词 :轮式移动机器人 ;轨迹跟踪 ;反演 ;滑模变结构控制 中图分类号 : TP 24 文献标识码 :A 文章编号 :0258 - 7971 (2007) S1 - 0064 - 04
S =
s1
xe
s2 = θe + arctg (νrye)
.
(4)
通过设计滑模控制器 ,使 s1 →0 , s2 →0 ,即实现 xe 收敛到零且θe 收敛到 - arctg (νeye) ,从而实现 ye →
0.
3 滑模跟踪控制器设计
取等速趋近律[12 ] ,令
si = -
[ 4 ] YOUN G K D ,U T KIN V I ,OZGUN ER U . A control engineer’s guide to sliding mode[J ] . IEEE Trans on Contr Syst Tec , 1999 ,7 (3) :3282342.
[ 5 ] Sira Ramirez H. On t he dynamical sliding mode control of nonlinear systems[J ] . Int J of Control ,1993 ,57 (5) :1 03921 061. [ 6 ] 徐俊艳 ,张培仁. 非完整轮式移动机器人轨迹跟踪控制研究[J ] . 中国科学技术大学学报 ,2004 ,34 (3) :3342380. [ 7 ] 吴卫国 ,陈辉堂 ,王月娟. 移动机器人的全局轨迹跟踪控制[J ] . 自动化学报 ,2001 ,21 (3) :3262331. [ 8 ] 叶涛 ,侯增广 ,谭民 ,等. 移动机器人的滑模轨迹跟踪控制[J ] . 高技术通讯 ,2004 ,11 :71274. [ 9 ] 李胜 ,马国梁 ,胡维礼. 一类不确定非完整移动机器人的时变自适应镇定[J ] . 机器人 ,2005 ,27 (1) :10219. [ 10 ] KRISTIC M , KAN ELLA KOPOUS I , KO KO TOV IC P V. Nonlinear and adaptive control design[ M ] . New York :John Wi2
S=
= s2
-
k2 |
s2
s2 | + δ2
= θe + 55νανr r + 55αyeye
=
ωr - ω + 55νανr r + 55αyeye
.
经整理 ,得到控制律为
yeω +νrcosθe -
hωrsinθe + k1 |
s1
s1 | + δ1
q=
ν ω=
ωr
+
55νανr r
+
5α 5 ye
图 5 控制量变化曲线图 Fig. 5 Time history of t he control flow
参考文献 :
[ 1 ] BROC KETT R W. Asymptotic stability and feedback stabilization[ C] . In : Differential Geometric Control Theory ,Burkhaus2 er ,Boston :1983 ,1812191.
Ξ 收稿日期 :2007 - 03 - 21 基金项目 :国家自然科学基金资助项目 (60362001) . 作者简介 :程俊林 (1982 - ) ,男 ,湖北人 ,硕士生 ,主要从事机器人智能控制方面的研究. 通讯作者 :赵东风 (1957 - ) ,男 ,湖北人 ,教授 ,博士生导师 ,主要从事随机多址通信系统和通信工程方面的研究.
x
cosθ - hsinθ ν
y = sinθ hcosθ ω .
(1)
θ
0
1
考虑对具有位姿指令 p r = ( x r y rθr) T 和速度指令 qr = (νrωr) T 的参考小车的轨迹跟踪 ,如图 2 所示. WMR 从位姿 p = ( x yθ) T 移动到位姿 pr = ( x r y rθr) T ,移动机器人在新坐标 系 Xe - Ye 中的坐标为 pe = ( xe yeθe) T ,其中 θe = θr - θ.
[ 2 ] HU Y M ,CHAO H M. Hif h2order sliding mode control of nonlinear control systems wit h application to mobile robots. Ad2 vances in Variable Structure Systems :Analysis , Integration and Applications[ C] . Singapore : World Scientific ,2000 ,1252134.
在该控制输入作用下
,
pe
(
xe
yeθe)
T
有界
, 且li m t →∞
‖(
xe
yeθe)
‖T
=
0.
2 切换函数的设计
基于反演 (Backstepping) 的滑模切换函数的设计过程如下
当
xe
= 0 时 ,考察部分 L yapunov 函数 V y