第三章摄影测量基础知识资料
第三章摄影测量基础知识

地面摄影测量坐标系
一、像平面上的坐标系
1.框标坐标系
边框标
原点:框标连线交点P x轴:航向框标连线方向
y轴:旁向框标连线方向 y
x
P
机械框标(或边框标)
角框标
原点:框标连线交点P x轴:框标连线在航向方向夹角的平分线
y轴:垂直于x轴的方向作为y轴
坐标轴的正方向都按右手定则确定。
2.像平面坐标系(o-xy)
考虑因素:成图比例尺、测图方法、成图精度、 经济性等因素,还得综合考虑航摄像片以后的使 用可能性。
测图比例尺
比例尺类型 航摄比例尺 测图比例尺
1:2000 ~1:3000
大比例尺 1:4000 ~1:6000 1:8000 ~1:12000 中比例尺 1:15000~1:20000 1:10000~1:35000 小比例尺 1:20000~1:30000 1:35000~1:55000
?
A
3.4 摄影测量常用的坐标系统
摄影测量几何处理的任务是根据像片上 像点的位置确定相应地面点的空间位置。 摄影测量中常用的坐标系有两大类: 像方坐标系:描述像点的位置 物方坐标系:描述地面点的位置
像平面坐标系
像方坐标系
像空间坐标系
摄 影 测 量 坐 标 系
物方空间坐标系
像空间辅助坐标系
地面测量坐标系
T
s y
o
地面测量坐标为国家统一坐 标系,平面坐标为高斯-克 吕格3度带或6度带投影 (1980西安坐标系),高程 为1985黄海高程系
x
a
Zt Xt A
A(Xt,Yt,Zt) Yt
•地面摄影测量坐标系
设立原因:摄影测量坐标系采用的是右手系,而地面 测量坐标系采用的是左手系,这给由摄影测量坐标到 地面测量坐标的转换带来了困难。为此,在摄影测量 坐标系与地面测量坐标系之间建立一种过渡性的坐标 系,称为地面摄影测量坐标系。 其坐标原点在测区内的其一地面点上,X轴与航线方向 大致一致,但为水平.Z铀铅垂,构成右手直角坐标系。
摄影测量课件-摄影测量基础知识
攝影比例尺定義:
嚴格定義: 1 l
mL
航攝像片上影像線段的長 地面上對應線段的水準距離
攝影比例尺是像片的平均比例尺
f
:
攝影機主距
1 m
f H
H:攝影航高,以攝區內的平均高程面作為攝影基
準面,攝影機的物鏡中心至該面的距離。(攝影瞬
間攝影機物鏡中心相對於平均海水面的航高稱為絕
對航高。相對於其他某一基準面或某一點的高度均
航空攝影的過程中,我們所關心的區域往 往是要大於一幅影像所覆蓋的區域,這時 候
想想:攝影基線和像片的重疊度有什麼關係?
如果同樣的像幅大小,採用大比例尺和採 用小比例尺攝影基線長度一樣嗎?
攝影基線B 攝站點 航空攝影略圖
攝影方式
❖ 豎直航空攝影:航攝儀在曝
光瞬間物鏡主光軸與地面垂
直,通常規定像片傾角小於
一般情況下,要求航向重疊度最好為60%-65%,最小不 能少於53%;旁向重疊要求30%-40%,最小不少於15%。
思考:如果像幅是23cm*23cm,攝影比例尺是 1:10000,那麼這個像幅所覆蓋的實地面積是多大?
如果是1:50000的比例尺,面積又是多少?
23cm*10000* 23cm*10000=2.3km*2.3km 影:以飛機作為主要工作平
臺,把航攝儀安裝在航攝飛機上,
從空中一定角度對地面物體進行攝
影,飛行航線一般為西東方向,航
攝機在攝影曝光的瞬間物鏡主光軸
保持垂直地面。
而在攝影測量學中我們講的航空攝 影是主要是我們高精度的測繪地形 圖或者是進行4D產品的生產所進行 的空中攝影稱為航空攝影。我們研 究的範圍比較窄一些,而且主要指 的是針對地面進行攝影。
三、攝影測量生產對攝影資料的基本要求
摄影测量学基础第3章 单张像片的解析基础
• 此 外 : 航向、旁向重叠度小于最低要求时,称航摄 漏洞,需要在航测外业做补救。当摄区地面起伏较 大时,还要增大重叠度,才能保证像片立体量测与拼 接。
• 应当指出,随着航空数码相机的应用,已有航向重叠 度大于80%、旁向重叠度在40%~360%的大重叠度 航空摄影测量出现;利用三线阵传感器摄影,还可具 有100%的重叠度。
3、中心投影 [Central Projection]
所有投射线或其延长线都通过一个固定点的投影,叫做 中心投影。投影光线会聚的点S称为投影中心。
负片位置: 正片位置:
投影中心
-摄站
投影中心位于物体和投影平面之间。 投影中心位于物体和投影平面同侧。
S
S
S
§3.2 中心投影
4、中心投影主要特性 [Main Features of Central Projection]
投射线互相平行的
投射线垂直于投影平面的
投影,叫做平行投影。 平行投影称为正射投影。
§3.2 中心投影
2、平行投影与正射投影
[Parallel Projection & Orthographic Projection ]
AB
D C
地形图 a0 b0 c0 d0
地形图在局部范围内是地面的正射投影!
§3.2 中心投影
受技术和自然条件限制,飞机往往不能按预定航线飞行 而产生航线弯曲,造成漏摄或旁向重叠过小。一般要求航 摄最大偏距与全航线长之比不大于3%。
5、像片旋角
相邻像片的主点连线与像幅沿航线方向两框标连线间的 夹角称为像片旋角。
有像片旋角k会使重叠度受到影响,一般要求不超过60, 最大不超过80。
航线方向
航线方向
3摄影测量基本知识
a3 a1 b3 ⋅ a2 c3 a3
摄影测量基本知识
五、中心投影构像方程(共线方程)
n 旋转矩阵R中方向余弦的关系
Ø 同一行(列)的各元素自乘之和为1; Ø 任意两行(列)对应元素互乘之和为0; Ø 行列式为1
S f
y
x0
O y0
x
摄影测量基本知识
四、航摄像片的内外方位元素
w S φ Zs o v u y κ x
三个线元素
X S、 YS、 Z S
ω
ϕ、ω、κ
Z Y D D Ys Xs X
三个角元素
摄影测量基本知识
四、航摄像片的内外方位元素
1)以Y轴为主轴的ϕ、 ω 、 κ Z Y S y Zs Z Y Ys N A Xs ϕ κ x ω ox X o X 航向倾角ϕ 旁向倾角ω 像片旋角κ
P T
基准面E 投影面P 透视轴TT 投影中心S 主光轴SO 像主点o 地面主点O 像底点n 地底点N 航高H
l l l l l l l l
像片倾角a 等角点c 地面等角点C 主垂面W 主纵线vv 基本方向线VV 循点J 合面、合线、主合 点I l 主横线 l 等比线
理解主合点和像底点的意义
航摄像片上特殊的点、线、面
摄影测量基本知识
一、航空摄影基本知识
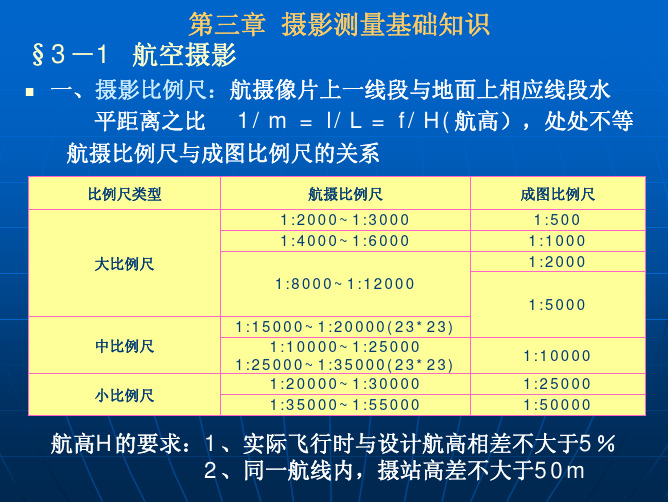
1、摄影比例尺(像片比例尺)
n 摄影比例尺的定义 S f a P
l
1 m
=
l L
=
f H
H
n 航摄像片上处处不相等
Ø 像片非水平拍摄 Ø 地面地形起伏
L
第3章 摄影测量基础知识

§3-3航摄像片上特殊的点、线、面
重 要 的
等角点特性
在倾斜像片和水 平地面上,由等 角点c和C所引出 的一对透视对应 线无方向偏差, 保持着方向角相 等
点 线 特 征
c
C
§3-3航摄像片上特殊的点、线、面
重 要 的
点 线 特 征 等比线特性
等比线的构像比例尺等于水平像片上的摄影比 例尺,不受像片倾斜影响
S
H
A B
C D
§3-1 航空摄影 复杂性:像片上每一个位置的比例尺都可能不同。
数学工具:微 分
f S H d c a b P0 P
A B
C D
§3-1 航空摄影 1、像点比例尺的概念和一般公式 • 像点比例尺的概念 点比例尺定义:为像片上 某点在某一方向上的无穷 小线段与地面上相应线段 长度比的极限。
•
•
§3-3航摄像片上特殊的点、线、面
透视变换中的特别点、线、面 基本要素(S、P、E) 特殊面(3): 主垂面(W) 真水平面/合面(G) R 遁面(R)
G
S
P
W E
§3-3航摄像片上特殊的点、线、面
1、透视变换定义 (Definition of the Perspective Transform )
投影中心
Center of Projection (COP). -摄站
S
S
S
§3-2中心投影的基本知识
2、平行投影与中心投影
阳位与阴位之间的 关系及转换 f S f
b'
a'
主距 Principal distance
a
A
b
B
§3-2中心投影的基本知识
2、平行投影与中心投影
第三章 摄影测量基础知识
a + a2 + a3 = 1
2 1 2 2
a12 + b12 + c12 = 1 a2 2 + b2 2 + c2 2 = 1 a32 + b32 + c32 = 1 a1a2 + b1b2 + c1c2 = 0 (b) a1a3 + b1b3 + c1c3 = 0 a2 a3 + b2b3 + c2c3 = 0
一、点 摄影中心S,像主点o,像 底点n, 地底点N,等角点c,主合 点i 二、线 摄影机轴So,垂线SN, 主纵线vv, 主横线 hoho ,等比线hchc 三、面 像片面P,地平面E,主垂 面W
hi W S hc
H
ho
i f o
v
α c
hi V O E
T V J v
n N
P T
h hc o C
等比线的特性:等比线上比例尺处处相等
逆变换
⎡x ⎤ ⎡u ⎤ ⎢ y ⎥ = R −1 ⎢ v ⎥ = RT ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣− f ⎦ ⎣ w⎦
⎡u ⎤ ⎡ a1 b1 c1 ⎤ ⎡u ⎤ ⎢v ⎥ = ⎢ a b c ⎥ ⎢v ⎥ ⎢ ⎥ ⎢ 2 2 2⎥⎢ ⎥ ⎢ ⎥ ⎣ ⎣ w⎦ ⎢ a3 b3 c3 ⎥ ⎢ w⎥ ⎦⎣ ⎦
b12 + b2 2 + b 32 = 1 c + c2 + c3 = 1
2 1 2 2
a1b1 + a2b2 + a3b3 = 0 (a ) a1c1 + a2 c2 + a3c3 = 0 b1c1 + b2 c2 + b3c3 = 0
第3章摄影测量基础知识

三、摄影测量生产对摄影资料的基本要求
1、影像的色调 影像清晰、色调一致、反差适中,无防碍测图 的阴影。 2、像片倾角 像片倾斜角的要求,一般为2-3度之间。
像片倾斜角:航空摄影时,航空 摄影机主光轴与铅垂线的夹角, α= 0 时为最理想的情形。
3、像片重叠 ❖航向重叠度与旁向重叠度
航向重叠:同一航线内相邻像 片应有一定的影像重叠。 旁向重叠:相邻航线也 应有一定的重叠。
地面摄影测量坐 标系
摄影测量坐标系
像平面坐标系
1.框标坐标系
框标坐标系是依像片上相应框标连线作为基准建立直角坐 标。
对于框标设在像幅四边中央的像片,通常依航线方向两边 对应框标连线作为x轴,以飞行方向为正方向;旁向两边 对应框标连线作为y轴,方向以右手系确定;两连线的交 点P作为坐标原点.如图所示。
2、航摄机在摄影曝光的瞬间物镜主光轴保持垂直地 面。
3、要确定地面点,用单张像片是不能确定位置的, 只能确定方向,所以要采用从不同摄站对同一区 域进行立体摄影,所以要求两相邻的照片要有重 叠,重叠的范围称为航向重叠度(60%-65%,最 小不得小于53%)。同理旁向重叠(30%-40%, 最小不得小于15%)
4、航线弯曲
❖ 航线弯曲:把一条航线内的像片根据地物的影像叠拼 起来,各张像片的像主点连线不在一条直线上,而呈 现为弯弯曲曲的折线
❖ 航线弯曲度:一条航线内各张像片主点至首尾两张像
主点连线的最大偏离度⊿L
⊿L
≤ 3%
L
⊿L L
我国航空摄影规范 中明确规定:航线 弯曲度一般不得超 过3%
5、对像片旋角的要求
2、重要点、线满足的数学关系:
on ftg
oc ftg 2
oi fctg
摄影测量学基础知识点

摄影测量学基础知识点一、摄影测量学的基本概念。
1. 摄影测量学定义。
- 摄影测量学是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
简单来说,就是利用摄影像片来测定物体的形状、大小和空间位置的学科。
2. 摄影测量的分类。
- 按距离远近分。
- 航天摄影测量:利用航天器(卫星、航天飞机等)上的摄影机对地球表面进行摄影,获取大面积的影像数据,主要用于地形测绘、资源调查、环境监测等全球性或大区域的项目。
- 航空摄影测量:通过飞机等航空飞行器上的航空摄影机对地面进行摄影,是地形测绘、城市规划等中常用的测量手段,它可以获取较高分辨率的影像,覆盖范围相对航天摄影测量小,但精度较高。
- 地面摄影测量:将摄影机安置在地面上,对目标物进行摄影测量。
常用于近景摄影测量,如建筑变形监测、文物保护中的三维建模等。
- 按用途分。
- 地形摄影测量:主要目的是测绘地形图,获取地面的地形地貌信息,包括等高线、地物位置等。
- 非地形摄影测量:用于测定物体的外形、大小和运动状态等,在工业制造(如汽车外形检测)、生物医学(如人体骨骼测量)等领域有广泛应用。
3. 摄影测量的发展历程。
- 早期的摄影测量主要基于模拟摄影测量仪器,如立体测图仪等。
通过光学机械的方法,将摄影像片进行模拟处理,实现地形测绘等功能。
- 随着计算机技术的发展,进入解析摄影测量阶段。
通过建立数学模型,利用计算机解算像片上像点的坐标,提高了测量的精度和效率。
- 现在,数字摄影测量成为主流。
它以数字影像为基础,利用计算机视觉、图像处理等技术,实现自动化、智能化的摄影测量处理,如数字高程模型(DEM)生成、正射影像图制作等。
二、摄影测量的基本原理。
1. 中心投影原理。
- 摄影测量中,摄影机的镜头相当于一个中心投影的投影中心。
地面上的点在像片上的成像过程是中心投影。
- 设地面点A,摄影中心S,像点a,在中心投影下,A点发出的光线通过镜头S 后,在像平面上成像为a点。
3摄影测量基础知识

Photogrammetry,2004
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
y
P S
S
a
a0
f
f
o
c
y0
P0
A
h
x x0
像片倾斜引起像点位移
A0
地形起伏引起像点位移
• 航摄像片只要消除像片倾斜与地形起伏引起的像点位移,就 能将中心投影变换为正射投影。要使这种投影具有成图比例尺
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
(n)oa0 a S
H
A
h
B A0 ( N )O
Photogrammetry,2004
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
• 航高:指摄影飞机在摄影瞬间相对于某一水准面 的高度,从该水准面起算向上为正。航高分为相对 航高和绝对航高。
Photogrammetry & Remote Sensing-----Survey & Mapping Engineering
相对航高是指摄影机物镜相对于某一基准面的高度,常称 为摄影航高。它是相对于被摄区域内地面平均高程基准面的 设计航高。
3、倾斜误差性质
➢等比线上的点不存在像片倾斜引起的像点位移; ➢当00 1800, a 0,则rc0 rc ,像点朝向等角点位移; ➢当 1800,a 0 ,则rc0 rc ,像点背向等角点位移; ➢当 90、270,sin 1,即在向径相等的情况下,位 于主纵线上的像点的倾斜误差最大。
第三章摄影测量基础知识

已知 E 平面上有 AB 直线,在像平面上作对应的像 ab
主合点
P
中 心 投 影 作 图
迹点
S T v T1
i
b
a
i1
v B
A E
作图步骤: 1)找迹点T1 2)找合点i1 3)连T1i1与SA, 交点为a 4)连T1i1与SB, 交点为b 5)a与b 连线
T
已知垂直物面的空间直线 AB,在像平面上作对应的像 ab
摄站点:摄影的曝光过程是飞机在飞行中瞬间完 成的,在这一曝光时刻,摄影机物镜所在的空 间位置称为摄站点S。 摄影基线:航线方向相邻两个摄影站间的空间距 离,通常用B表示。
摄影基线
P1
S1
B
P2
S2
E
三、摄影测量生产对摄影资料的基 本要求
1.影像的色调:
要求影像清晰,色调一致,反差适中,像片上 不应有妨碍测图的阴影。
1:500
1:1000 1:2000, 1:5000 1:5000 1:10000 1:25000 1:50000
摄影航高
当选定了摄影机和摄影比例尺后,即f和m为已知,
可以计算得出摄影航高H=mf。
摄影测量规范规定:同一航带内最大航高与最小
航高之差不得大于30米,摄区内实际航高与设计
航高不得大于50米。
1 l m L
H
航片倾斜、地形起伏时m不为常数。 当取摄区内的平均的高程作为摄 影基准面时,摄影机的物镜中心 至该面的距离称为摄影航高。 E
A L
O
航高:相对航高和绝 对航高。
1 f m H
f为摄影机主距, H为航高
测图比例尺
摄影比例尺越大,像片地面的分辨率越高, 有利于影像的解译与提高成图精度,但摄影 比例尺过大,增加工作量及费用,所以,摄 影比例尺要根据测绘地形图的精度要求与获 取地面信息的需要来确定。
第三章摄影测量基础知识

H=mf,航空摄影时就要求按计算的航高飞行摄影,以获得符 合生产要求的摄影像片。摄影测量规范规定同一航带内最大航 高与最小航高之差不得大于30m,摄影区域内实际航高与设计 航高之差不得大于50m。
§3-1 航空摄影
二、空中摄影过程
航空摄影前要做计划,摄影时要选择晴朗无云的天气。 飞行航线一般为东西方向,要求航线相邻两张像片应有 60%左右的重叠度,相邻航线的像片应有30%左右的重 叠度,航摄机在摄影曝光的瞬间物镜主光轴保持垂直地面。
成图比例尺 1:500 1:1000 1:2000 1:5000
1:10000
1:25000
§3-1 航空摄影
一、摄影比例尺与摄影航高
航高是指摄影飞机在摄影瞬间相对某一水准面的高度。根 据基准面的不同,航高可分为相对航高和绝对航高。相对航高 是指摄影瞬间摄影物镜相对于被摄区域内地面平均高程基准面 的高度;绝对航高是摄影瞬间摄影物镜相对于平均海平面的高 度,是摄影瞬间摄影物镜的真实海拔高度。
正射投影
投影射线 与投影平 面正交
投影射线会聚于一点的投影称为中心投影
投影射线 物点
投影点
投影中心 投影平面
航摄像片为中心投影,地形图为正射投影
c ba
S
中心投影
B
A
C
AC B
c ab
正射投影
地 形 图 的
1、图上任意两点间的距离与相应地面点 的水平距离之比为一常数,等于图比 例尺
特 2、图上任意一点引画的两条方向线间的
计算要获取1:500的比例尺地形图, 大致需要多少张影像?
摄影过程是如何实施的?
摄影过程 确定测区范围 选择摄影机 确定摄影比例尺及航高 需要像片的数量、日期及航摄成果的验收
第三章-摄影测量基础知识(一)
2、摄影比例尺的确定
摄影比例尺定义: 严格定义: 1 l m L
1 f m H
航摄像片上影像线段的长
地面上对应线段的水平距离
摄影比例尺是像片的平均比例尺
f : 摄影机主距
H:摄影航高,以摄区内的平均高程面作为摄影基 准面,摄影机的物镜中心至该面的距离。(摄影瞬 间摄影机物镜中心相对于平均海水面的航高称为绝 对航高。相对于其他某一基准面或某一点的高度均 为相对航高。)
3、摄影比例尺的选择
摄影比例尺越大,像片地面的分辨率越 高,有利于影像的解译与提高成图精度, 但摄影比例尺过大,增加工作量及费用, 所以,摄影比例尺要根据测绘地形图的精 度要求与获取地面信息的需要来确定。 考虑因素:成图比例尺、测图方法、成 图精度、经济性等因素,以及经济性和航 摄像片以后的使用可能性。
在曝光瞬间,摄影机物镜所处的空间位置称
为摄站点。航线方向相邻两摄站点的空间距 离称为摄影基线,通常用B表示。
摄影基线B
摄站点
航空摄影略图
以测绘地形为目的的空中摄影多采用竖直摄
影方式,即要求航摄仪在曝光的瞬间物镜主 光轴保持与地面垂直。 竖直航空摄影 倾斜航空摄影 摄影完毕后,将感光的底片进行摄影处理, 得到航摄像片。
竖直航空摄影包括:
面积航空摄影:主要用于测绘地形图,或进行大面
积资源调查。在指定摄区内布设一系列互相平行的直 线摄影航线并覆盖整个区域的航空摄影。 条状地块航空摄影:主要用于公路、铁路、输电线
路定线和江、河流域的规划与治理工程,通常只拍摄
一条或几条航线,即沿狭长地带或规定线路进行的航
空摄影。
6、对航高差的要求
航高差:空中摄影时飞行航高的变化量
H 5% H
无人机技术智能测绘 第3章 摄影测量技术基础知识

摄影测量的分类
摄影测量简介
摄影测量的分类:
➢ (2)按用途分类
➢ 地形摄影测量:主要任务是测绘国家基本比例尺的
地形图和各专题图,建立地形数据库,为地理信息系 统提供三维基础数据。无人机摄影测量通常应用于地 形摄影测量。
➢ 非地形摄影测量:将摄影测量方法应用于资源 调查、变形观测、环境监测、军事侦察等领域, 主要通过从二维影像重建三维模型,提取各种 信息。
倾斜摄影测量
03
摄影测量产品
摄影测量产品
DOM(数字正射影像图):
数字正射影像图(DOM)是以航摄或遥感影像为基础,通过扫描处理和辐射改正后裁剪成的影 像数据,同时添加地形要素信息,形成以栅格数据形式存储的影像数据库,具有地形图的几何精度 和影像特征。
➢ (1)影响特征:数字正射影像图(DOM) 兼具地图几何精度和影像特征,具有高精 度、信息丰富、逼真、迅速获取等优势。 可用于地图分析、资源调查、社会经济发 展研究、防灾规划等应用,提供可靠基础 数据,支持地图修测更新和数据评价。。
• 传感器搭载在航空飞机或航空器上,摄影距 离在 1~10km, 是当前摄影测量生产各种中 小比例尺地形图的主要方法。
• 传感器搭载在无人机上,摄影高度在 100~1000m,是生产各 种大比例尺地形图 的主要方法,也常用于小区域工程测图和补 测航摄漏洞。
• 摄影距离小于 300m,主要用于特定的竖 直目标,而非地 形目标的测量。
➢ (1)建立方法
✓ 1.直接从地面测量,所涉及的仪器有水平导轨、测针和相对高 程测量板等构件,也可以用 GPS、全站仪、野外测量等高端 仪器;
3 正射影像图扫描
正射影像图扫描直接对已有的光学正射影像图进行数字化扫描, 再经过几何纠正获得数字正射影像的数据。
第3章 摄影测量基础知识

坐标系的转化: x x x0 y y y0
o
x
p
x’
是解析计算中像点坐标常采用的像平面坐标系,归算后的坐标
x x0, y y0
量测值
量测值
3.像空间直角坐标系 S—xyz
作用:描述像点在像空间的位 置 原点:投影中心S 坐标轴:Z轴与摄影方向So重合, 朝上为正方向;x和y轴分别平 行于像平面坐标的相应轴,方 向一致。右手系。
作用:表示像点在像平面上的位置
1.框标坐标系
框标坐标系是依像片上相应框标连线作为基准建立直角 坐标。 原点:框标连线交点 坐标轴:按需要而定,X轴:与航线方向相近的连线
对于框标设在像幅四边中央的像片,通常依航线方 向两边对应框标连线作为x轴;旁向两边对应框标连 线作为y轴;两连线的交点P作为坐标原点.如图所 示。
CN Htg
J
2
SJ iV H
sin
v(V) N
C
O
3、重要点、线的性质
底点的特性:像底点是空间
一组铅垂线的合点(诸铅垂 线在像面上的构像应位于以 点n为辐射中心的相应辐射
线上)
等角点的特性:在倾斜像片和水平地面上,由等角点c
和C所引出的一对透视对应线无方向偏 差,保持着方向角相等
一、航空摄影前的准备
航
1、确定摄区范围
摄
摄区太大时,要进行分区
计 划
1
m
1 8000
1
m
1 8000
h最高
h最低
H摄 6
2、航摄仪的选择
平坦地区大比例尺测图: 综合法测图 长焦距窄角
非平坦地区 全能法测图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
成图比例尺 1:500 1:1000 1:2000 1:5000
1:10000
小比例尺
1:20000~1:30000 1:35000~1:55000
1:25000 1:50000
§3-1 航空摄影
一、摄影比例尺与摄影航高
航高是指摄影飞机在摄影瞬间相对某一水准面的高度。根 据基准面的不同,航高可分为相对航高和绝对航高。相对航高 是指摄影瞬间摄影物镜相对于被摄区域内地面平均高程基准面 的高度;绝对航高是摄影瞬间摄影物镜相对于平均海平面的高 度,是摄影瞬间摄影物镜的真实海拔高度。
夹角称为像片旋角。 有像片旋角会使重叠度受到影响,一般要求不超过60,
最大不超过80。
航线方向Байду номын сангаас
航线方向
§3-2 中心投影的基本知识
投
投影:用一组假想的直线将物体向几何面投射
影
方
投影射线:投影的直线
式
投影平面:投影的几何面
投影射线平行于某一固定方向的投影的投影称为平行投影
斜投影
投影射 线与投 影平面 斜交
角不大于20,最大不超过30。
A为像片倾角
A
摄影机主光轴
铅垂线
§3-1 航空摄影
4、航线弯曲
受技术和自然条件限制,飞机往往不能按预定航线飞行 而产生航线弯曲,造成漏摄或旁向重叠过小。一般要求航 摄最大偏距与全航线长之比不大于3%。
§3-1 航空摄影
5、像片旋角 相邻像片的主点连线与像幅沿航线方向两框标连线间的
的影l 像与地面上相应线段的水平距离L之比,即
1l mL
我们所说的摄影比例尺,是指平均比例尺,当取摄区内的平均
高程面作为摄影基准面时,摄影机的物镜中心至该面的距离称为
摄影航高,一般用H表示,摄影比例尺表示为
1 f mH
f为摄影机主距。
摄影比例尺越大,像片地面分辨率越高。
§3-1 航空摄影
一、摄影比例尺与摄影航高
当选定了摄影机和摄影比例尺后,就可以计算出摄影航高
H=mf,航空摄影时就要求按计算的航高飞行摄影,以获得符 合生产要求的摄影像片。摄影测量规范规定同一航带内最大航 高与最小航高之差不得大于30m,摄影区域内实际航高与设计 航高之差不得大于50m。
§3-1 航空摄影
二、空中摄影过程
航空摄影前要做计划,摄影时要选择晴朗无云的天气。 飞行航线一般为东西方向,要求航线相邻两张像片应有 60%左右的重叠度,相邻航线的像片应有30%左右的重 叠度,航摄机在摄影曝光的瞬间物镜主光轴保持垂直地面。
§3-1 航空摄影
二、空中摄影过程 当测区面积较大和测区地形复杂时,需要将测区划分为
若干个摄影航带,每个航线不宜太长,同一摄区内地形要 大致类同,可以采用同一航空摄影机以相同航高进行摄影, 以利于用同一航测成图方法成图。摄影分区可在小比例尺 的旧图上规划。
§3-1 航空摄影
三、摄影测量生产对摄影资料的基本要求
点
夹角等于地面上对应的水平角
航 当像片倾斜、地面起伏时,地面点在航摄像片上 构像相对于理想情况下的构像所产生的位置差异
摄 称像点位移
像
s
s
片
a bc
的
p
a
b0
a0 b
p
A
特
CE
B0
点
AB 像片倾斜引起的
A0
B
地形起伏引起的
像点位移
像点位移
比 例 尺:地图有统一比例尺,航片无统一比例尺
表示方法:地图为线划图,航片为影像图
航摄像片是所摄地面的中心投影
a c
b S
B C
A
§3-3 航摄像片上特殊的点、线、面
将空间点、线作中心投影,在投影平 面P上得到一一对应的点、线,这种 经中心投影取得的一一对应的投影关 系称为透视变换
表示内容:地图需要综合取舍
几何差异:航摄像片可组成像对立体观察
摄影测量的主要任务之一:把地面按中心投影规律获取 的摄影比例尺航摄像片转换成以测图比例尺表示的正射 投影地形图
负片位置: 正片位置:
投影中心
-摄站
投影中心位于物体和投影平面之间。 投影中心位于物体和投影平面同侧。
S
S
S
§3-2 中心投影的基本知识
1、影像清晰,色调一致; 2、航向重叠一般为60%,旁向重叠一般为30%; 3、像片倾角不大于2°,最大不大于3°; 4、航线偏距与全航线长之比不大于3%; 5、像片旋角一般不超过6°,最大不超过8°。
§3-1 航空摄影
2、像片重叠 为满足测图需要,在同一条航线上,相邻两像片应有一定
的影像重叠,称为航向重叠。航向重叠一般要求60~65%, 在大比例尺测图时要求达到85%左右。
正射投影
投影射线 与投影平 面正交
投影射线会聚于一点的投影称为中心投影
投影射线 物点
投影点
投影中心 投影平面
航摄像片为中心投影,地形图为正射投影
c ba
S
中心投影
B
A
C
AC B
c ab
正射投影
地 形 图 的
1、图上任意两点间的距离与相应地面点 的水平距离之比为一常数,等于图比 例尺
特 2、图上任意一点引画的两条方向线间的
计算要获取1:500的比例尺地形图, 大致需要多少张影像?
摄影过程是如何实施的?
摄影过程 确定测区范围 选择摄影机 确定摄影比例尺及航高 需要像片的数量、日期及航摄成果的验收
§3-1 航空摄影
3、像片倾角 摄影瞬间摄影机轴发生了倾斜,摄影机轴与铅垂方向的
夹角为像片倾角。 飞机受气流的影响,航摄仪不可能完全置平,一般要求倾
测大比例尺地形图时,航摄比例尺小于测图比例尺;
测中比例尺地形图时,航摄比例尺接近测图比例尺;
测小比例尺地形图时,航摄比例尺大于测图比例尺;
比例尺类型 大比例尺 中比例尺
航摄比例尺 1:2000~1:3000 1:4000~1:6000 1:8000~1:12000 1:15000-1:20000
1:25000~1:35000
第三章 摄影测量基础知识
主要内容
一、航空摄影 二、中心投影的基础知识 三、航摄像片上特殊的点、线、面 四、摄影测量常用的坐标系统 五、航摄像片的内外方位元素 六、像点的空间直角坐标变换与中心投影构象方程 七、航摄像片上的像点位移 八、单幅影像解析基础
§3-1 航空摄影
一、摄影比例尺与摄影航高
摄影比例尺又称为像片比例尺,其定义:航摄像片上一线段为
测图需要两相邻航带摄区之间也要有一定得重叠用以联系 相邻航带的摄区拼接,称为旁向重叠,旁向重叠不少于20%, 由于空中摄影飞行时不易保持两航线间的平行性,一般取30 %~40%.最小不得小于15%。
航向、旁向重叠小于最低要求的称为航摄漏洞,需要在 航测外业做补救。
武汉市辖区面积:8406平方千米 ; 航拍过程中像幅大小为 23cm*23cm