CWGS型擦窗机机座及行走部件设计
CCJK擦窗机控制器设置手册

对以下故障有检测功能:超载、超速、碰撞、链条松、钢丝绳松、电机过热、 变频器故障。当某一故障发生时,相应的动作停止执行,接通报警电路。同时, 手持操纵盒上的 LED 显示屏显示相应的故障代码。
本擦窗机控制器有参数设置功能,通过手持操纵盒按键可分别设置各动作的 加减速延时及转速;设置各开关的确认时间(提高抗干扰性能)。 3. CCJK_1 型擦窗机控制器的构成
本擦窗机控制器由主控制器、手持操纵盒、吊篮控制盒(安装于吊篮中)三 部分构成。
3.1 主控制器 主控制器为一 300X200X50mm 的金属盒,其上有 4 排接线端子排。主
按下吊篮上升按键,延时一段时间后(延时时间在设置中的第 J4 项设 置,见表 2),LED 显示屏显示“d11”,表示是由主机手持操纵盒控制在执 行吊篮上升动作(LED 显示屏显示代码的含义见表 1)。此时吊篮左升降电 机接触器控制端口 66 及吊篮右升降电机接触器控制端 81 接通,延时一段 时间后(延时时间在设置中的第 J6 项设置,见表 2),变频调速器的控制 端口 54~61 输出相应的正转信号及相应的转速频率和加速时间编码(转速 频率和加速时间选择在设置中的第 J8,J9 项设置,见表 2),变频调速器开 始运行,变频调速器运转频率达到设定的“检出频率”时,信号反馈到控 制器的 47 端口,控制器的制动松开控制端口 78 接通,电机制动器接电松 开制动,电机按设定的加速时间将转速从 0 逐步升到设定的转速,然后按 设定的转速运行。
6 大臂回转逆极限(R) 16 大臂一缩极限(R) 26 电缆右极限(R)
7 大臂变幅正极限(R) 17 大臂二伸极限(R)
擦窗机的主要方案
擦窗机的主要方案
(一)简介
随着现代城市建筑的日益发展,**篮球馆作为一个奥运会场向世界人民展示“新北京、新奥运”的理念,篮球馆的外饰面大多采用高级美观的装饰材料。
为了使建筑物减缓由于自然环境污染所造成的城市建筑的老化过程,其外墙的定期安全检修、维护、清洗越来越引起人们的高度重视,安全、实用、高效的外墙面清洗维护系统---擦窗机为物业管理的一个必备设备。
本工程的擦窗机位于主体建筑的顶部,此部分屋面为轻钢屋面,没有过多支座,因此轨道下设有钢梁。
本工程擦窗机拟采用吊臂式,在不工作时考虑了它的存放位置不影响立面的完整性。
同时,擦窗机还与屋面系统紧密配合。
(二)擦窗机的主要作用
维护---可以承载两名工作人员对建筑物外饰面进行检查和维护
清洁---可以承载两名工作人员定期对建筑物外饰面进行保洁、维修,可以使建筑物的外观保持整洁并风貌常新
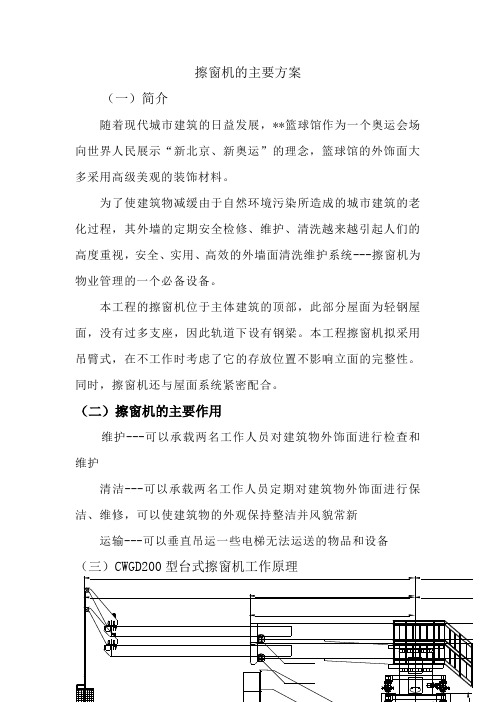
运输---可以垂直吊运一些电梯无法运送的物品和设备(三)CWGD200型台式擦窗机工作原理
(四)CWGD200型台式擦窗机技术参数
(五)质量承诺及售后服务
1、保修期:
自工程合格交验之日起十二个月为保修期,提供免费维护保养,更换损坏的零部件。
质保期满后,双方可以签定优惠的维护保养合同。
2、质量保证措施:
A、工程预埋时,本公司即派人员指导现场预埋工作,确保工程的质量与工期;
B、整机设计符合国家有关标准;
C、所有电机减速机均采用国际名牌产品,品质优良,所有钢制悬挂件均采用国内优质钢材,表面经热浸镀锌防腐处理。
擦窗机技术性能说明-new(伸缩臂)

文件编号:CA2007-0315(BJ)工程名称:广州电视塔业主单位:擦窗机设备设计及供应北京施捷达通机电技术有限公司二零零七年三月十五日一.擦窗机设备布置介绍二.擦窗机设备适用标准及使用环境要求三.擦窗机设备技术性能四.设备清单及主要配置参照珠海晶艺提供的广州电视塔的屋顶平面图及A-A、B-B、C-C、D-D、E-E的剖面图,我公司依据设备应高效率、高安全、高性能的设计原则,设计如下擦窗机方案在标高454.000、355.200、168.000、116.000、38.000的结构平面沿女儿墙内侧布置水平工字钢轨道,在轨道上分别布置CWG250屋面轨道式卷扬擦窗机。
1、在最上层的454平面上布置的擦窗机型号为CWG250LS立柱伸缩、吊篮伸缩的擦窗机一台,立柱伸缩4米,吊篮伸缩3米,起升高度100米。
负责标高355米以上外立面的维保,;由于建筑屋外立面收缩距离很大,在钢结构的外表面每隔40米设一圈钢丝绳约束装置。
2、在标高为平面上355.200布置的擦窗机型号为CWG250S立柱伸缩、吊篮伸缩的擦窗机一台,负责标高355米以下、168米以上外立面的维保,吊篮伸缩3米、起升高度190米;由于建筑屋外立面收缩距离很大,在钢结构的外表面每隔40米设一圈钢丝绳约束装置。
3、在标高为平面上168.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度60米。
负责标高168米以下、116米以上外立面的维保;4、在标高为平面上116.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度80米。
负责标高116米以下、38米以上外立面的维保;5、在标高为平面上38.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度40米。
负责标高38米以下外立面的维保;1、设计制造符合以下标准:擦窗机符合中华人民共和国《GB19154-2003擦窗机》及《GB19155-2003 高处作业吊篮》标准参照执行BS6037标准或欧洲标准prEN1808。
擦窗机设备方案
目录目录........................................................... 错误!未定义书签。
第一章擦窗机系统设置.......................................... 错误!未定义书签。
1.CWG200S型擦窗机设备组成及功能、特点:.................... 错误!未定义书签。
2.CWG200型擦窗机设备组成及功能、特点:..................... 错误!未定义书签。
第二章擦窗机设备的技术规范及设计标准.......................... 错误!未定义书签。
第三章擦窗机设备设计参数...................................... 错误!未定义书签。
1.设计荷载 ................................................ 错误!未定义书签。
2.安全系数 ................................................ 错误!未定义书签。
3.轨道技术参数 ............................................ 错误!未定义书签。
4.工作环境 ................................................ 错误!未定义书签。
5.进口部件一览表 .......................................... 错误!未定义书签。
第四章设备的质量标准、检测标准、测试手段 ...................... 错误!未定义书签。
第一章擦窗机系统设置厦门塔楼建筑最高点标高为米。
本擦窗机方案:在标高为米的屋面设CWG200S型擦窗机一台(见图0661-P-A2),吊臂长约米,轨道间距米。
在标高为米的屋面设CWG200型擦窗机一台(见图0661-P-A3),吊臂长约米,轨道间距米。
高层建筑擦窗机配重设计
F
Y X
O
门窗专栏
W= 10G1(L2+L3+ΔL)+10G2(L2+L'+ΔL)+5G3(L2-L1) 10L1+3B
+ 5G5(ΔL+2L2-m)-3BG 合 3
(4)
10L1+3B
式中:G 合 3=G1+G2+G3+G4+G5
在该配重下一级伸缩臂的最大安全伸出长度 ΔL':
G3 (L2-L1) +G5( ΔL-m +L2)+G2(L2+L'+ΔL)
2012.10
23
TM
Doors & Windows
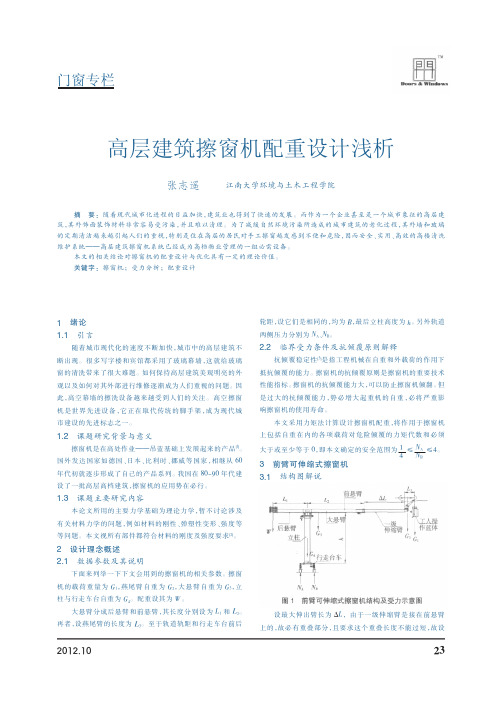
重 叠 长 度 为 m, 并 且 规 定 m≥1500mm, 一 级 伸 缩 臂 自 重 为 G5。
3.2 计算思路
由于一级伸缩臂的伸缩长度多变和工人操作蓝体的载 重有很多种类型,为了计算方便,我们取其中两种极限工况 进行计算。 重载时,一级伸缩臂伸到极限长度的情况下,臂架 上所有力向臂架与立柱连接处简化,得到对立柱的压力 F 和 弯矩 M。 再由力的平衡及力矩平衡原理可求出配重 W 表达 式,从而校验一级伸缩臂的最大安全伸缩长度 ΔL'。 如果最大 安全伸缩长度 ΔL' 小于实 际 工 作 要 求 的 安 全 长 度 ΔL, 则 重 新选择配重,直至所选配重满足要求。
门窗专栏
TM Doors & Windows
高层建筑擦窗机配重设计浅析
张志遥
江南大学环境与土木工程学院
摘 要: 随着现代城市化进程的日益加快,建筑业也得到了快速的发展。 而作为一个企业甚至是一个城市象征的高层建 筑,其外饰面装饰材料非常容易受污染,并且难以清理。 为了减缓自然环境污染所造成的城市建筑的老化过程,其外墙和玻璃 的定期清洁越来越引起人们的重视,特别是住在高层的居民对手工擦窗越发感到不便和危险,因而安全、实用、高效的高楼清洗 维 护 系 统 — — — 高 层 建 筑 擦 窗 机 系 统 已 经 成 为 高 档 物 业 管 理 的 一 组 必 需 设 备 。
一、设备参数 (一)擦窗机设计必须满足下面说明要求 建筑物外墙的维修

一、设备参数(一)擦窗机设计必须满足下面说明要求1、建筑物外墙的维修、装饰、安装玻璃幕墙等;2、建筑物外墙防水的检修;霓虹灯的维修;3、建筑物及附属系统的进行定期保洁,维修,可以操作到本工程外墙的任何部位并进行清洁、安装玻璃、维修等工作,在设计本工程擦窗机的高度时,应考虑屋面避雷针的高度(约8米高)。
4、擦窗机上必须安装辅助卷扬机装置,可辅助吊装一些较大件物(如200公斤玻璃)。
(二)擦窗机设备性能说明1、擦窗机设备及安装配件具备很强的防腐防锈能力,能适应海洋性气候,盐雾腐蚀。
2、本设备满足下列规范要求:(1)中华人民共和国地方或行业部门颁发的有关规范规定(2)、符合中华人民共和国国家标准《擦窗机》GB19154-2003, 《高空作业吊篮》GB19155-2003,JG/T5033-93《高空作业吊篮用提升机》,JG5027《高空作业吊篮安全规则》,JG/T5032《高空作业吊篮》 JG/T5034《高空作业吊篮用安全锁》,JG/T5025《高空作业吊篮性能实验方法》,《CDG200轨道式擦窗机企业标准》,TRA900(德国),DTU951(法国),BS6037(英国)或PREN1801等标准。
(3)、若使用的规范标准之间有矛盾,以规定严格的为准。
(三)本设备在下列条件使用有效1、能适应的环境条件室外:温度-20-50度,最大相对湿度98%气候:海洋性气候,盐雾腐蚀抗风性能:工作时:8.3M/S(5级)停泊时:40M/S(12级)2、电源条件:三相交流380V、50HZ,单相交流220V、50HZ,波动范围:电压±10%,频率±2%(四)设备可靠性及安全系数1、设备作业率≥92%2、设备无故障时间≥480小时3、手动滑降可靠工作率96%4、安全系数>12(五)擦窗机抗震能力:擦窗机整机设计的设备安装后抗震能力达到发生8级地震时擦窗机不会发生倾倒和坠落。
(六)擦窗机周边要求设置不锈钢防护栏杆80米,1.1米高以满足安全要求为准(采购方提供图纸),在本工程的投标报价时考虑。
大型擦窗机行走机构结构分析与优化

目前,大型擦窗机还属于发展初期,针对其行走机构的研究还较 少,本文对擦窗机行走机构的承重轮进行接触分析,提出基于改 善轮轨接触状态的优化方法,对整机运行性能的提升有着较大意 义;对框架结构进行力学性能分析并进行结构改进,可在一定程 度上使擦窗机下车部分实现等应力分布,对大型擦窗机的设计与 研发提供参考和依据,为擦窗机技术的发展奠定基础。
基于APDL参数化语言,在ANSYS软件中建立擦窗机整机有限元模 型,对其进行力学分析,发现整机最大应力出现在行走机构框架 的立轴上,通过分析其应力、应变情况,找到行走机构框架结构 的薄弱位置,并依据特征值屈曲分析结果判断整机稳定性,为结 构优化和改进提供依据。最后,针对行走机构进行优化,利用 ANSYS优化模块对承重轮进行轻量化研究,对框架结构进行结构 改进,并对优化方案进行强度、刚度、稳定性校核,验证优化的 合理性。
本文首先利用SolidWorks三维建模软件建立擦窗机整机的三维 模型,将其导入ADAMS仿真软件中,完成擦窗机的虚拟样机模型。 根据擦窗机完整工作循环过程进行动力学仿真分析,获得擦窗机 运行的速度、加速度,轮轨接触力等运动特性和动力参数,找到 危险工作位置,为擦窗机行走机构的结构有限元分析及优化做准 备并提供数据支持。
行走机构分为承重轮和框架结构两部分,针对行走机构的承重轮, 分别运用赫兹接触理论和有限元弹性接触分析的方法对承重轮 与轨道进行弹性接触分析,结果发现有限元弹性接触分析的方法 与赫兹理论计算方法相比,限定条件少,精度较高,较为符合实际 接触状态。对承重轮与轨道进行有限元弹塑性接触分析,与弹性 接触分析结果进行对比可见承重轮己达到材料屈服极限,其轮轨 材料显示出较好的承载能力。
大型擦窗机行走机构结构分析与优化
擦窗机作为高空作业的特种非标产品,己经成为高层及超高层建 筑外墙维护、清洁的重要机械设备。随着异形墙面建筑的发展, 为扩大擦窗机作业范围,满足更高的作业要求,臂长超过30 m的 大型擦窗机逐渐发展,且伸缩臂型屋面轨道式擦窗机逐渐成为主 流机型。
擦窗机钢结构施工组织设计

海尔信息产业园生产中试楼屋顶擦窗机海尔信息产业园生产中试楼屋顶擦窗机钢结构工程施工组织设计编制:审核:批准:编制单位:上海亚泰建设集团有限公司编制日期:2011年10月23日目录一、编制依据二、工程概况三、施工部署(一)、施工力量安排(二)、劳动力组织(三)、工程管理目标(四)、施工前期准备工作四、钢结构的工厂加工制作(一)、制作前准备工作(二)、钢结构加工制作流程(三)、放样、下料和切割(四)、矫正和成型(五)、、边缘加工(六)、制孔(七)、组装(八)、成品检验(九)、成品保护(十)、保证质量措施(十一)、钢结构的焊接(十二)、预拼装(十三)、包装、运输和存放五、现场钢结构安装(一)、安装前准备工作(二)、安装工艺流程(三)、基础和支承面(四)、钢梁安装方法六、钢结构防腐涂装(一)、施工准备(二)、工艺流程(三)、涂装施工(四)、涂层检查与验收(五)、成品保护(六)、应注意的质量问题七、工程质量保证措施及质量关键点处理八、施工工期保证措施九、确保安全生产措施十、文明生产、工地卫生保证措施十一、施工现场消防保卫措施十二、降低工程成本措施十三、原材料质量保证措施、技术资料真实性保证措施附:制作施工机具设备表安装施工机具设备表施工组织设计一、编制依据1.钢结构工程招标文件及招标补充文件.2.建筑设计研究院有限公司设计图纸。
3.现行的国家和山东省各种施工、验收规范、规范和质量评定标准. 4.现行的国家和山东省关于建设工程施工安全技术法规和安全技术指标.5.本公司颁发的文件,工艺标准及施工方法和经验及公司拥有的技术力量。
二、工程概况1、工程名称:海尔信息产业园生产中试楼屋顶擦窗机钢结构工程.2、工程地点:青岛崂山区。
3、结构设计:主体结构为钢结构;主要构件有钢梁、钢柱。
在保证工期的前提下,我公司面临日吊装工程量大、海洋气候施工等不利施工因素,因此安全文明施工显得尤为重要,我公司领导非常重视,对安全施工提出了明确的要求,并作出了的具体的布署。
擦窗机设计方案
擦窗机设计方案(一)简介随着现代城市建筑的日益发展,作为一个城市、企业的象征的高层、综合性建筑的外饰面大多采用高级美观的装饰材料。
为了使建筑物永保青春,减缓由于自然环境污染所造成的城市建筑的老化过程,其外墙的定期安全检修、维护、清洗越来越引起人们的高度重视,安全、实用、高效的外墙面清洗维护系统---擦窗机已经成为高档物业管理的一个必备设备。
(二)擦窗机的作用维护---可以承载两名工作人员对建筑物外饰面进行检查和维护。
清洁---可以承载两名工作人员定期对建筑物外饰面进行保洁、维修,可以使建筑物的外观保持整洁并风貌常新。
应急---在火灾等特殊情况下,可以垂直运送被困人员。
运输---可以垂直吊运一些电梯无法运送的物品和设备。
(三)擦窗机系统设计方案本工程挺拔修长,线条流畅,建筑宏伟,设计风格独特,该大厦落成后,将成为华南城的又一标志性建筑。
对此,我司特组织擦窗机系统工程设计专家进行了充分的论证和分析。
本工程建筑标高为99.75米,在塔楼轴线1与8之间有一呈凸肚的尖顶,呈级梯收缩并带有凸肚。
给擦窗机的设置带来种种困难。
本工程的建筑面积较大,擦窗机有很大的服务面积。
本着实用、安全、经济的原则,我公司为本工程外墙清洁维修方案。
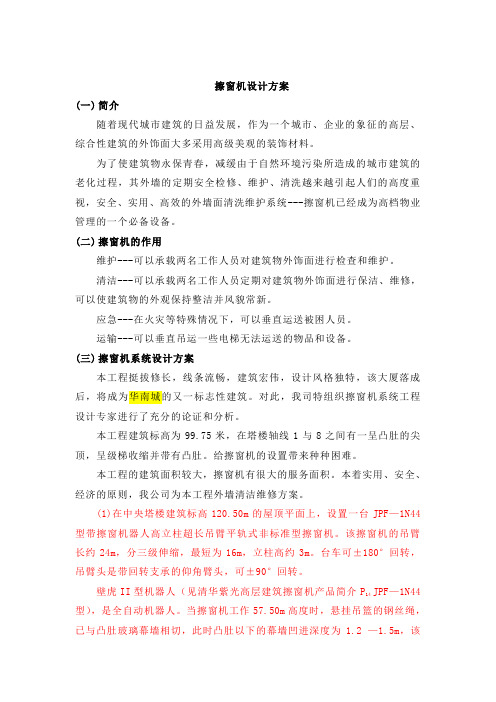
(1)在中央塔楼建筑标高120.50m的屋顶平面上,设置一台JPF—1N44型带擦窗机器人高立柱超长吊臂平轨式非标准型擦窗机。
该擦窗机的吊臂长约24m,分三级伸缩,最短为16m,立柱高约3m。
台车可±180°回转,吊臂头是带回转支承的仰角臂头,可±90°回转。
JPF—1N44壁虎II型机器人(见清华紫光高层建筑擦窗机产品简介P14型),是全自动机器人。
当擦窗机工作57.50m高度时,悬挂吊篮的钢丝绳,已与凸肚玻璃幕墙相切,此时凸肚以下的幕墙凹进深度为 1.2 —1.5m,该处的玻璃幕无法清洗,只能机器人来完成。
机器人能沿着幕墙自动上、下行走,擦洗墙面。
CWGS型擦窗机机座及行走部件设计

毕业设计说明书毕业设计题目CWGS型擦窗机机座及行走部件设计学院专业班级学生姓名性别男指导教师职称讲师2011年月日摘要随着高层建筑的出现,其外端墙面或玻璃幕墙外表面的清洗与维护的难题,就摆在了人们的面前。
传统的解决方法为,一是搭建脚手架,耗费太大;二是用绳索将操作者悬吊下降,危险性极大。
擦窗机应运而生,擦窗机是在起重机械的基础上发展而来的一类建筑专用机械。
从字面上理解是擦窗户的机器;但从实际使用的角度理解,是一种具有能够升降的吊篮及其悬吊机构,适用于建筑物外墙面的清洗、维护和紧急情况下的应急载人机械设备。
擦窗机的总类包括水平轨道式、附墙轨道式、轮载式、插杆式、悬挂轨道式、滑梯式。
本次设计为水平轨道式擦窗机,擦窗机主要结构有台车行走机构、台车、吊臂回转机构、吊船升降机构、吊船旋转机构、协助卷绕机构、船体、过载保护装置、防撞保护装置、行程限位保护装置。
整个机器由本组成员四人一起负责设计,本人负责机座及行走部件的设计,包括主动轮组、托盘部件、机座、旋转吊臂、从动轮组、平衡臂滑轮组、回转减速箱。
关键词:擦窗机;底座;主动轮组;回转减速器As high-rise building dozen appear, outside its end tope or glass curtain wall outer surface of cleaning and maintenance problem, right in front of people's presence. Traditional solutions, a scaffold, cost is set too large; But with the rope will decline, danger operator suspension. Gondola emerged, Gondola is in hoisting machinery and develops on the basis of a kind of architectural special-purpose machinery. Literally understanding is cleaning the Windows machines; But from the Angle of actual use of understanding, is a kind of very can lift the hanging baskets and suspended institutions, suitable for buildings have clean and maintenance and outside the emergency manned mechanical equipment. Emergency The total category includes wipe window machine track type, level of wall rail type, wheel attached carrying type, insert pole type, hanging rail type, slide type. This design for horizontal rail type brush window machine, rub window machine main structure have car walk institutions, trolley, auto go institutions, arm swing mechanism, ship lifting mechanism, ship rotating mechanism, help winding institutions, hull, carrier protection device and bump protection device, Cheng Xian a protection device. The whole machine group members by the four friends responsible for design, I was responsible for the design of seating and walking components, including active wheel, tray parts, base, rotating the arm, driven wheels, balance arm pulleys, slewing reducer.Keywords: Gondola;Lamp stand;Active wheel set;Slewing drive第一章前言 (1)1.1课题的提出 (1)1.2概述 (2)第二章设备结构介绍 (3)2.1台车 (3)2.1.1台车行走机构 (3)2.1.2 吊臂回转机构 (3)2.1.3 吊船升降机构 (3)2.1.4 吊船旋转机构 (3)2.1.5 辅助卷绕机构 (4)2.2 吊船 (4)2.2.1 吊船体 (4)2.2.2 限载保护装置 (4)2.2.3 防撞保护装置 (4)2.2.4 行程限位保护装置 (4)第三章设计要求 (5)3.1主要技术参数及工作、存放条件 (5)3.1.1主要技术参数 (5)3.1.2 工作条件 (5)3.1.3 存放条件 (5)3.2 一般要求 (6)3.3 系统结构的要求 (6)3.3.1工作平台的要求 (6)3.3.2提升机构的要求 (6)3.3.3安全装置要求 (6)3.3.4钢丝绳的要求 (7)3.3.5悬挂机构的要求 (7)3.3.6电气系统的要求 (8)3.4 工作平台承载要求 (8)3.5 工作平台的安装、拆除的要求 (8)第四章电气系统 (10)4.1 主电路 (10)4.2 控制电路 (10)4.3主电控箱 (10)4.4 安全保护装置 (11)第五章使用方法 (12)5.1 准备阶段 (12)5.2 工作阶段 (13)5.3 结束阶段 (13)第六章擦窗机轮压分析计算及校核 (15)6.1轮压分析计算 (16)6.1.1伸缩臂在最大幅度,平衡重在最大幅度时 (18)6.1.2伸缩臂在最小幅度,平衡重在最小幅度时 (18)6.1.3伸缩臂在最小幅度,平衡重仍在最大幅度时,即平衡重设计时不考虑移动 (19)6.2轮压校核 (20)6.2.1设备工作,停机时轮压校核计算: (20)6.2.2在工作状态时,臂架处于支承面45度角时,各轮轮压: (22)6.2.3在停车状态时最大轮压 (23)6.3结论 (25)第七章技术经济性分析 (26)7.1中国擦窗机行业前景分析 (26)7.2市场竞争分析 (26)7.3发展趋势 (28)第八章结论 (29)参考文献 (30)致谢 (31)附录一: (1)附录二 (13)第一章前言1.1课题的提出随着城市的现代化,一座座高楼拔地而起。
擦窗机
擦窗机作为一种常没高空作业载人设备,其安全性和可靠性要求非常高,各个部件都必须具有足够的强度和承载力。
本文针对轨道基础的设计进行了分析和计算,供同行参考。
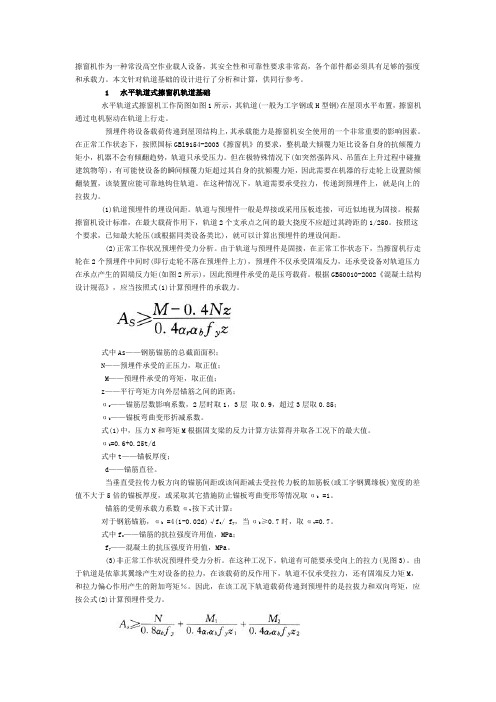
1 水平轨道式擦窗机轨道基础水平轨道式擦窗机工作简图如图1所示,其轨道(一般为工字钢或H型钢)在屋顶水平布置,擦窗机通过电机驱动在轨道上行走。
预埋件将设备载荷传递到屋顶结构上,其承载能力是擦窗机安全使用的一个非常重要的影响因素。
在正常工作状态下,按照国标GBl9154-2003《擦窗机》的要求,整机最大倾覆力矩比设备自身的抗倾覆力矩小,机器不会有倾翻趋势,轨道只承受压力。
但在极特殊情况下(如突然强阵风、吊篮在上升过程中碰撞建筑物等),有可能使设备的瞬间倾覆力矩超过其自身的抗倾覆力矩,因此需要在机器的行走轮上设置防倾翻装置,该装置应能可靠地钩住轨道。
在这种情况下,轨道需要承受拉力,传递到预埋件上,就是向上的拉拔力。
(1)轨道预埋件的埋设间距。
轨道与预埋件一般是焊接或采用压板连接,可近似地视为固接。
根据擦窗机设计标准,在最大载荷作用下,轨道2个支承点之间的最大挠度不应超过其跨距的1/250。
按照这个要求,已知最大轮压(或根据同类设备类比),就可以计算出预埋件的埋设间距。
(2)正常工作状况预埋件受力分析。
由于轨道与预埋件是固接,在正常工作状态下,当擦窗机行走轮在2个预埋件中间时(即行走轮不落在预埋件上方),预埋件不仅承受固端反力,还承受设备对轨道压力在承点产生的固端反力矩(如图2所示),因此预埋件承受的是压弯载荷。
根据GB50010-2002《混凝土结构设计规范》,应当按照式(1)计算预埋件的承载力。
式中As——钢筋锚筋的总截面面积;N——预埋件承受的正压力,取正值;M——预埋件承受的弯矩,取正值;z——平行弯矩方向外层锚筋之间的距离;αr——锚筋层数影响系数,2层时取1,3层取0.9,超过3层取0.85;αb——锚板弯曲变形折减系数。
式(1)中,压力N和弯矩M根据固支梁的反力计算方法算得并取各工况下的最大值。
擦窗机技术性能说明-new(伸缩臂)
文件编号:CA2007-0315(BJ)工程名称:广州电视塔业主单位:擦窗机设备设计及供应北京施捷达通机电技术有限公司二零零七年三月十五日一.擦窗机设备布置介绍二.擦窗机设备适用标准及使用环境要求三.擦窗机设备技术性能四.设备清单及主要配置参照珠海晶艺提供的广州电视塔的屋顶平面图及A-A、B-B、C-C、D-D、E-E的剖面图,我公司依据设备应高效率、高安全、高性能的设计原则,设计如下擦窗机方案在标高454.000、355.200、168.000、116.000、38.000的结构平面沿女儿墙内侧布置水平工字钢轨道,在轨道上分别布置CWG250屋面轨道式卷扬擦窗机。
1、在最上层的454平面上布置的擦窗机型号为CWG250LS立柱伸缩、吊篮伸缩的擦窗机一台,立柱伸缩4米,吊篮伸缩3米,起升高度100米。
负责标高355米以上外立面的维保,;由于建筑屋外立面收缩距离很大,在钢结构的外表面每隔40米设一圈钢丝绳约束装置。
2、在标高为平面上355.200布置的擦窗机型号为CWG250S立柱伸缩、吊篮伸缩的擦窗机一台,负责标高355米以下、168米以上外立面的维保,吊篮伸缩3米、起升高度190米;由于建筑屋外立面收缩距离很大,在钢结构的外表面每隔40米设一圈钢丝绳约束装置。
3、在标高为平面上168.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度60米。
负责标高168米以下、116米以上外立面的维保;4、在标高为平面上116.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度80米。
负责标高116米以下、38米以上外立面的维保;5、在标高为平面上38.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度40米。
负责标高38米以下外立面的维保;1、设计制造符合以下标准:擦窗机符合中华人民共和国《GB19154-2003擦窗机》及《GB19155-2003 高处作业吊篮》标准参照执行BS6037标准或欧洲标准prEN1808。
擦窗方案说明

擦窗方案说明本方案在主楼标高164.4米结构屋面设置一台单臂卷扬式整机进口擦窗机设备,轨道采用Q235H型钢,表面处理采用热浸锌。
擦窗机设备选用荷兰LALESSE公司产品,轨道布置及擦窗机设备参考见附图一中系统一。
对于西北裙房处,根据提供的剖面资料采用单轨系统,单轨轨道采用工字钢,表面处理采用热浸锌。
轨道及埋件布置参考附图一中系统二。
具体需要有关建筑结构设计配合。
东面裙房处北部分由主楼擦窗机处理,其余部分采用插杆系统即可,插杆基础埋件布置见附图一中系统三。
电动爬升吊篮和系统二共用。
主楼擦窗机设备自重、轮压及轨道埋件情况等可分别参考附图二。
裙房擦窗机系统可参考附图一中A-A、B-B等视图。
LALESSE SA-300双人爬升式吊船规格和技术性能数据1. 总描述该设备由欧洲荷兰LALESSE公司制造,型号为SA-300,双人爬升式吊船,其工作范围为裙房部分玻璃幕墙。
擦窗机设计的正常操作工作环境为:环境温度 - 10°C ~ + 40°C空气相对湿度不超过90%作业人员工作处,风速小于10.8m/s(相当于阵风6级)2. ‘Lalesse’公司SA-300双人爬升式吊船2.1 型号为Lalesse SA-300双人爬升式吊船,外形构造如厂商说明书中所述,全部由铝合金型材制造,底板采用铝合金网纹板, 四边栏杆构架式设计,全部采用氩弧焊惰性气体焊接方式,受力件以镀锌高强度螺栓连接,吊船外前方设橡胶滚轮2只,以减少与玻璃幕墙之间的碰撞力,滚轮的外伸距离可以调节,以适合吊船与玻璃幕墙之间不同的距离需要,吊船底部有四只活动滚轮,可使吊船在地面方便地移动。
2.2 传动机构外形构造如厂商说明书所描述,每只传动机构的额定载荷为 400kg,并设有弹簧/电磁制动和离心力式制动器,传动机构由一台三相感应式电机通过一组二级齿轮箱驱动,齿轮箱为全封闭油润滑设计,具有很长的设计寿命,在电源中断时,传动机构可以进行手动操作,以便将吊船降至地面,整套传动机构包括电机和齿轮箱的外罩都以铝合金制造。
CWGD250型双摇杆擦窗机结构优化与分析

为此,本文以研究、设计新型擦窗机设备为主要任务,以现有的 擦窗机模型为基础,以数字化设计技术为主要手段,对CWGD250型 双摇杆擦窗机进行设计研究。首先,依据数字化设计的现代设计 理念与技术路线,确定本文中擦窗机数字化样机的设计流程:擦 窗机方案设计三维实体模型数字模拟与仿真结构优化设计;其次, 以擦窗机动力参数为基础,通过设计各个动力电机的驱动功率, 以此来满足擦窗机设计时的基本额定参数,同时通过对擦窗机的 抗倾覆验算,确定擦窗机在工作过程中的稳定性以及擦窗机整体 结构设计的合理性;应用ANSYS有限元分析软件对擦窗机主要工 作部件——吊臂进行静力学分析和动力学分析,以验证其刚度、 强度是否满足设计要求,确定其在工作状态下的稳定性;为了进
CWGD250型双摇杆擦窗机结构优高层建筑突飞猛进,擦窗机 的应用已得到普遍的推广,为了满足不同结构形式擦窗机对特定 建筑物屋顶结构的适应性,需要不断地改善擦窗机自身结构形式 并降低其自身重量、提升安全性。然而,对于国内市场,由于擦 窗机的发展较晚,设计经验相对薄弱,导致固有的设计方法无法 满足建筑业对擦窗机复杂、多样的需求,严重制约了我国擦窗机 设备的健康发展。
同时以各杆件的截面尺寸以及材料厚度为设计变量,以减少材料 消耗为目标函数,对擦窗机最危险部件——吊臂进行优化设计, 最终完成数字化样机的仿真分析过程。本文的研究成果将为一 般类擦窗机的设计与分析提供一定的科学依据和理论参考,对完 善和发展擦窗机设计技术具有一定理论意义。
水平轨道式双臂型擦窗机设计
南京工业大学学士学位论文摘要随着人类社会的发展,越来越多的高楼大厦矗立起来。
作为一个城市、企业象征的高层、综合性建筑的外饰面大多采用高级美观的装饰材料。
在给人们带来良好的视觉感受的同时也带来了许多问题,其中之一就是外墙清洗。
为了使建筑物永保青春,减缓由于自然环境污染所造成的城市建筑的老化过程,其外墙的定期安全检修、维护、清洗越来越引起人们的高度重视,安全、实用、高效的外墙面清洗维护系统---擦窗机已经成为高档物业管理的一个必备设备。
本课题针对水平轨道式双臂型擦窗机的设计计算,主要研究计算了以下几个方面的内容:1.对擦窗机进行了概述。
2.对水平轨道式双臂型擦窗机进行了阐述和设计。
3.参照擦窗机GB19154-2003和机械设计手册对水平轨道双臂型擦窗机进行了电动机的选择,水平轨道的设计及安全系统的分析。
关键词:建筑机械擦窗机水平轨道双臂设计计算摘要The design of horizontal rail arms type wipe window machineAbstractAlong with the development of human society, more and more of the high-rise building stand up. As a symbol of the city and company, there is much beautiful adornment material outside of the top building. It brings p eople good visual experience and causes a lot of problems at the same time, one of which is the external wall cleaning. In order to make the buildings remain youthful forever, slow down the ageing process of the urban construction caused by natural environment pollution and its external wall of the regular safety maintenance, cleaning, raise much attention. The system of safe, practical and efficient cleaning maintenance outside walls - wipe window machine has become a necessary equipment of high-grade property management.This topic is about wipe window machine device design calculation, the main research content are as follows:1.Wipe window machine is summarized.2.The design of horizontal rail arms type wipe window machine is elaborated and designed.3.With reference to wipe window machine GB19154 -2003 and Mechanical design manual, motor is selected, wheel pressure is calculated and checked, as well as the safety system is analyzed.Key words: building machinery; wipe window machine; the horizontal rail arms; design calculation南京工业大学学士学位论文目录摘要 (I)Abstract (II)第一章绪论 (1)1.1擦窗机发展概况 (2)1.2本文研究内容 (2)1.3擦窗机的定义及作用 (3)1.4擦窗机的分类与选型考虑因数 (3)第二章水平轨道式双臂型擦窗机结构设计 (5)2.1主要技术参数 (6)2.2擦窗机轨道设计 (7)2.3行走机构的设计 (9)2.4 电动提升机超载保护装置的设计 (9)2.5安全锁的设计 (10)2.6擦窗机的安装与维护 (12)第三章水平轨道式型擦窗机计算 (15)3.1吊篮减速电机的选择 (15)3.1.1选择电动机的类型 (15)3.1.2选择电动机的容量 (15)3.1.3确定电动机的转速 (16)3.2信号传送方式和钢丝绳选择 (17)3.3水平轨道式双臂型擦窗机的轨道设计计算 (19)3.4 安全系统分析 (21)3.4.1 高处吊篮安全锁制动性能 (21)3.4.2 卷筒制动器(后备制动器) (28)第四章结语 (32)参考文献 (33)致谢 (35)第一章绪论第一章绪论1.1擦窗机发展概况擦窗机是在高处作业吊篮基础上发展起来的产品。
CWGD250型擦窗机吊臂的优化设计与结构分析

CWGD250型擦窗机吊臂的优化设计与结构分析孙佳;桂宇贵;张珂【期刊名称】《沈阳建筑大学学报(自然科学版)》【年(卷),期】2016(032)002【摘要】目的分析CWGD250型擦窗机吊臂结构自重及稳定性,提出拉索式吊臂结构解决臂架过重以及臂身稳定性不够的问题.方法运用现代三维设计软件对比分析了擦窗机传统吊臂与拉索式吊臂的两种结构模型,并将模型导入到有限元计算软件中.选取擦窗机特定工况,考虑动载系数及风载荷对擦窗机的影响,计算分析拉索式吊臂结构和传统结构的静力学性能.结果在考虑动载系数及风载荷工况下,计算结果中拉索式吊臂的最大挠度为61.59mm,传统结构的最大挠度为177.11 mm,两种形式的最大挠度均出现在前端与旋转吊臂相连接的位置.拉索式吊臂的最大应力为273.08 MPa,出现在前部拉索的中间段;而传统结构的最大应力为303.41 MPa,集中作用在吊臂的回转支撑连接处;对比得到传统吊臂的自重310 kg是拉索式吊臂280 kg的1.1倍.结论擦窗机拉索式吊臂结构在提升臂架强度及稳定性的情况下,降低了整机的自重,经验证拉索式结构在擦窗机吊臂应用中具备可行性,为优化擦窗机的设计提供了参考.【总页数】8页(P322-329)【作者】孙佳;桂宇贵;张珂【作者单位】沈阳建筑大学机械工程学院,辽宁沈阳110168;沈阳建筑大学机械工程学院,辽宁沈阳110168;沈阳建筑大学机械工程学院,辽宁沈阳110168【正文语种】中文【中图分类】TU976.42【相关文献】1.擦窗机折叠式吊臂动静联合分析研究 [J], 于长洋;邓华波;李婷婷;吴玉厚2.作业车吊臂结构分析与优化设计 [J], 张平格;李向良;王新怡;谢腾宇3.基于相似理论的擦窗机吊臂有限元分析 [J], 叶娜;田常录4.塔式起重机双吊点水平吊臂结构分析与吊点位置的优化设计方法研究 [J], 陈荣波5.基于楼面谱法的CWGS250型擦窗机地震响应分析 [J], 郑夕健;徐亮;张海岩因版权原因,仅展示原文概要,查看原文内容请购买。
高空作业设备CWG250S屋面轨道式擦窗机-上海同新机电控制技术

z高空作业设备上海同新装备拥有自主知识产权的的高空作业设备,分为擦窗机械和高空作业平台二大类。
设备以高技术含量机电液一体化产品为主。
为建筑物幕墙维护及保洁提供可靠的服务。
擦窗机械产品分类:z CWG250屋面轨道式擦窗机(系列)z CUG250悬挂式擦窗机(系列)z CHT250滑梯式擦窗机(系列)设计制造符合以下标准:擦窗机符合中华人民共和国《GB19154-2003 擦窗机》及《GB19155-2003 高处作业吊篮》标准,同时符合欧洲prEN1808擦窗机标准。
高空作业平台产品分类:z ZGT200Z自行式直臂型高空作业平台(系列)z ZGT200Q自行式曲臂型高空作业平台(系列)z ZGT200J自行式剪叉型高空作业平台(系列)CWG250S屋面轨道式擦窗机主要技术参数起升高度 60-300 m 额定载荷 250kg 起升速度 8–9m/min 限载人数 2人 行走速度 7-8m/min 臂架伸缩速度 3-4m/min 立柱伸缩速度 0.4-0.8m/min 吊篮最大回转线速度 8-9 m /min标准吊篮尺寸 2000x650x1100mm(或伸缩吊篮)钢丝绳直径 φ8mm 钢丝绳安全系数 >10 电源380V,50HzCWG250屋面轨道式擦窗机B 型 CWG250屋面轨道式擦窗机C 型CWG250屋面轨道式擦窗机D 型 CWG250屋面轨道式擦窗机E 型CWG250屋面轨道式擦窗机D型 CWG250屋面轨道式擦窗机E型CWG250屋面轨道式擦窗机主要安全性能:名称 功能说明紧急停车装置 按钮位于醒目位置,遇意外时,能方便地紧急停车断电保护 遇意外停电时,主制动器(常闭式电机抱闸)触发,紧急停车,吊篮中止下降,吊篮可手动用专用松闸工具将吊篮降至安全地面。
吊臂回转控制安全装置 双机电一体安全传感控制限制系统安全装置超速安全装置 探测器及后备机械式离心测速联动,当吊篮超速下降时,紧急停车,自动关闭主电源并报警超载安全装置 超过额定荷载的25%时,保护装置触发,自动关闭主电源并报警 吊篮顶点限位装置 当吊篮到达上升极限位置时,自动停车(设有安全控制装置) 吊篮下降防撞保护 遇底部障碍物,自动停车并报警(设有安全控制装置)吊篮防倾翻装置 防止吊篮在空中失衡行走极限限位装置 主机行走动作至极限位置时,自动停车(设有安全控制装置) 回转极限限位装置 回转至极限位置时,自动停车(设有安全控制装置)卷扬钢丝绳防松脱装置 当遇意外卷扬钢丝绳松脱时安全装置动作并自动切断供电电源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随着高层建筑的出现,其外端墙面或玻璃幕墙外表面的清洗与维护的难题,就摆在了人们的面前。
传统的解决方法为,一是搭建脚手架,耗费太大;二是用绳索将操作者悬吊下降,危险性极大。
擦窗机应运而生,擦窗机是在起重机械的基础上发展而来的一类建筑专用机械。
从字面上理解是擦窗户的机器;但从实际使用的角度理解,是一种具有能够升降的吊篮及其悬吊机构,适用于建筑物外墙面的清洗、维护和紧急情况下的应急载人机械设备。
擦窗机的总类包括水平轨道式、附墙轨道式、轮载式、插杆式、悬挂轨道式、滑梯式。
本次设计为水平轨道式擦窗机,擦窗机主要结构有台车行走机构、台车、吊臂回转机构、吊船升降机构、吊船旋转机构、协助卷绕机构、船体、过载保护装置、防撞保护装置、行程限位保护装置。
整个机器由本组成员四人一起负责设计,本人负责机座及行走部件的设计,包括主动轮组、托盘部件、机座、旋转吊臂、从动轮组、平衡臂滑轮组、回转减速箱。
关键词:擦窗机;底座;主动轮组;回转减速器As high-rise building dozen appear, outside its end tope or glass curtain wall outer surface of cleaning and maintenance problem, right in front of people's presence. Traditional solutions, a scaffold, cost is set too large; But with the rope will decline, danger operator suspension. Gondola emerged, Gondola is in hoisting machinery and develops on the basis of a kind of architectural special-purpose machinery. Literally understanding is cleaning the Windows machines; But from the Angle of actual use of understanding, is a kind of very can lift the hanging baskets and suspended institutions, suitable for buildings have clean and maintenance and outside the emergency manned mechanical equipment. Emergency The total category includes wipe window machine track type, level of wall rail type, wheel attached carrying type, insert pole type, hanging rail type, slide type. This design for horizontal rail type brush window machine, rub window machine main structure have car walk institutions, trolley, auto go institutions, arm swing mechanism, ship lifting mechanism, ship rotating mechanism, help winding institutions, hull, carrier protection device and bump protection device, Cheng Xian a protection device. The whole machine group members by the four friends responsible for design, I was responsible for the design of seating and walking components, including active wheel, tray parts, base, rotating the arm, driven wheels, balance arm pulleys, slewing reducer.Keywords: Gondola;Lamp stand;Active wheel set;Slewing drive第一章前言 (1)1.1课题的提出 (1)1.2概述 (2)第二章设备结构介绍 (3)2.1台车 (3)2.1.1台车行走机构 (3)2.1.2 吊臂回转机构 (3)2.1.3 吊船升降机构 (3)2.1.4 吊船旋转机构 (3)2.1.5 辅助卷绕机构 (4)2.2 吊船 (4)2.2.1 吊船体 (4)2.2.2 限载保护装置 (4)2.2.3 防撞保护装置 (4)2.2.4 行程限位保护装置 (4)第三章设计要求 (5)3.1主要技术参数及工作、存放条件 (5)3.1.1主要技术参数 (5)3.1.2 工作条件 (5)3.1.3 存放条件 (5)3.2 一般要求 (6)3.3 系统结构的要求 (6)3.3.1工作平台的要求 (6)3.3.2提升机构的要求 (6)3.3.3安全装置要求 (6)3.3.4钢丝绳的要求 (7)3.3.5悬挂机构的要求 (7)3.3.6电气系统的要求 (8)3.4 工作平台承载要求 (8)3.5 工作平台的安装、拆除的要求 (8)第四章电气系统 (10)4.1 主电路 (10)4.2 控制电路 (10)4.3主电控箱 (10)4.4 安全保护装置 (11)第五章使用方法 (12)5.1 准备阶段 (12)5.2 工作阶段 (13)5.3 结束阶段 (13)第六章擦窗机轮压分析计算及校核 (15)6.1轮压分析计算 (16)6.1.1伸缩臂在最大幅度,平衡重在最大幅度时 (18)6.1.2伸缩臂在最小幅度,平衡重在最小幅度时 (18)6.1.3伸缩臂在最小幅度,平衡重仍在最大幅度时,即平衡重设计时不考虑移动 (19)6.2轮压校核 (20)6.2.1设备工作,停机时轮压校核计算: (20)6.2.2在工作状态时,臂架处于支承面45度角时,各轮轮压: (22)6.2.3在停车状态时最大轮压 (23)6.3结论 (25)第七章技术经济性分析 (26)7.1中国擦窗机行业前景分析 (26)7.2市场竞争分析 (26)7.3发展趋势 (28)第八章结论 (29)参考文献 (30)致谢 (31)附录一: (1)附录二 (13)第一章前言1.1课题的提出随着城市的现代化,一座座高楼拔地而起。
为了美观,也为了得到更好的采光效果,很多写字楼和宾馆都采用了玻璃幕墙,这就带来了玻璃窗的清洗问题。
其实不仅是玻璃窗,其它材料的壁面也需要定期清洗。
长期以来,高楼大厦的外墙壁清洗,都是“一桶水、一根绳、一块板”的作业方式。
洗墙工人腰间系一根绳子,悠荡在高楼之间,不仅效率低,而且易出事故。
近年来,随着科学技术的发展,这种状况已有所改善,目前外墙清洁主要有两种方式:吊板方式和擦窗机方式。
吊板方式是用吊绳、吊板将人吊到工作位置进行清洁,一般的大楼都可以用这种方式进行清洁。
这种方式简单、成本低,只要工人素质好,绳子连接牢固就可以进行,但危险性比较大,一旦安全措施不到位就可能发生事故。
近几年发生的高空清洁坠落伤亡事故几乎都是采用吊板清洁时因安全措施不到位造成的。
另一种方式是通过擦窗机进行清洁。
擦窗机又称室外吊篮,是一种用于建筑物或构筑物窗户和外墙清洗、维修等作业的常设悬吊接近设备。
因每一大楼的外形和楼面都各不相同,故擦窗机必须根据每一大楼具体的楼面情况而具体设计制造,一般在大楼建造时安装好。
工作人员站在吊篮内,吊篮可以上下左右移动,吊篮内有电话,可以与外界随时进行联系,比较安全。
擦窗机价格昂贵,不少新建大楼为了节省钱不安装擦窗机。
目前我国的大楼大多数没有擦窗机,只得用吊板方式进行清洁。
安装擦窗机是高楼外墙清洁发展方向,一些先进的国家已经发展到用无人操作擦窗机进行外墙清洁工作。
应大力研究发展国产的擦窗机,降低成本,使擦窗机逐渐普及。
根据吊船的动力装置的不同,擦窗机可分为爬升式擦窗机和卷扬式擦窗机两种。
爬升式擦窗机的爬升动力装于悬吊平台上,卷扬式擦窗机的动力靠装于大楼楼面的台车上的卷扬装置驱动。
爬升式擦窗机又可分为固定插杆式和台车行走式(有单轨,双轨,无轨几种),卷扬式一般只有台车行走式。
1.2概述擦窗机是对整个建筑外墙进行维护的机械设备,它不仅可对高层建筑的玻璃幕墙进行清洗,还可对破损的外墙进行修补及更换损坏的玻璃幕墙。
在各种擦窗机中,除全自动擦窗机不需要人员操作外其他类型的擦窗机均需要操作人员在工作平台上对建筑的玻璃幕墙进行清洗或修补。
另外,工作平台可上下或左右移动,使操作人员在工作平台上对建筑的玻璃幕墙的任何地方均可进行彻底的维修工作。
擦窗机是从起重机械发展而来的,部分擦窗机实际是小型化的门座起重机。
它是运用较广的插件爬升式设备,其插杆起源于大型轮船上悬挂救生艇的的一副旋转弯杆,该弯杆所起的作用就是吧救生艇从船内悬吊于船体外侧,擦窗机中的插杆的作用与此相同。
高层建筑幕墙面积大(常达20000-40000m²),离地面高度也大(建筑物高度达100m~300m,甚至更高),大面积幕墙要进行高空作业来清洁、维修,必须有相应的机械设备。
45m高度一下的幕墙,有时可以请消防部门出动伸缩云梯协助进行幕墙的清洁、维护;甚至有时还可以请临时工作吊篮进行全手工清洗,但不安全。
45m以上高度的幕墙,常常设置擦窗机以便进行幕墙的清洁和维护。
擦窗机通常由主机和吊笼组成,两部分之间用钢索滑轮组联系,通过钢索伸缩而竖直升降,而在墙面的移动,则通常要通过主机的行走或回转来实现。
由于建筑物的平面较大,所以行走式比回转式应用更广泛。
移动式擦窗机又分为自行式和轨道式,轨道式擦窗机运行平稳,荷载可以合理分配,应用更为广泛。
CWGS250型擦窗机是屋面导轨式伸缩臂变幅式擦窗机。
其部件主要有分:机床及行走部分、吊臂及立柱部分、起升及挑绳部分和吊船及机房部分。
其中机床及行走部分又可以分为底座部件、主动轮组、托盘、旋转吊臂、从动轮组、平衡臂滑轮组、回转减速箱。
吊臂及立柱部分可分为、活动立柱、主吊臂、平衡吊臂部件、伸缩吊臂、超速限位部件。
起升及挑绳部分可分为爬梯部件、导绳部件、卷绕部、排绳部件、钢绳限位部件、松断绳保护装置。