擦窗机方案设计图册
擦窗神器计划书

擦窗神器计划书项目背景在现代城市生活中,高楼大厦随处可见,而这些建筑常常需要窗户的清洁与保养。
然而,传统的擦窗方式往往不仅费时费力,还存在一定的安全隐患。
因此,我们团队决定研发一款擦窗神器,旨在解决这一问题,提高擦窗工作的效率和安全性。
项目目标•提供快速高效的擦窗解决方案•提升擦窗工作的安全性和可靠性•降低擦窗过程对人力和时间的依赖•实现自动化操作,减少工作人员的负担和风险项目计划阶段一:需求分析和概念设计在这一阶段,我们将与擦窗行业的相关专家、清洁服务公司和用户进行深入的沟通和调研,了解现有擦窗工作的痛点和需求。
在此基础上,我们将制定初步的产品需求和概念设计,包括机器人擦窗器的尺寸、功能以及使用场景等。
里程碑:需求分析和概念设计报告完成阶段二:技术研发和原型制作在这一阶段,我们将组建一支由机械工程师、电子工程师和软件工程师组成的团队,共同进行技术研发和原型制作。
我们将首先选择合适的擦窗机器人技术和控制系统,并进行模块化设计,以便在未来的产品迭代中更好地适应不同场景和需求。
接着,我们将进行原型制作和测试,不断优化和改进产品的性能和稳定性。
里程碑:擦窗机器人原型制作完成阶段三:产品测试和迭代优化在这一阶段,我们将对擦窗机器人进行大规模的测试和验证,包括性能测试、安全性测试和使用体验测试等。
通过用户的反馈和测试结果,我们将不断优化和改进产品的功能和设计,并开展一系列的迭代工作,以确保产品能够在实际应用中达到预期的效果。
里程碑:产品测试和迭代优化报告完成阶段四:生产制造和市场推广在这一阶段,我们将确定最终的产品规格和设计,并与合作伙伴合作进行批量生产制造。
同时,我们还将制定市场推广策略,包括渠道拓展、品牌推广和销售推广等,以便将产品推向市场并获得用户的认可和信任。
里程碑:产品批量生产和市场推广计划完成预期效益•提高擦窗工作的效率,减少人力和时间成本•提升擦窗工作的安全性,减少高空作业的风险•改善用户的使用体验,提升客户满意度•促进擦窗行业的创新和发展,提升产品的竞争力风险和挑战•技术难题:机器人擦窗器的设计和制造存在一定的技术难题,需要克服机械、电子和软件等方面的问题。
擦窗机的主要方案
擦窗机的主要方案
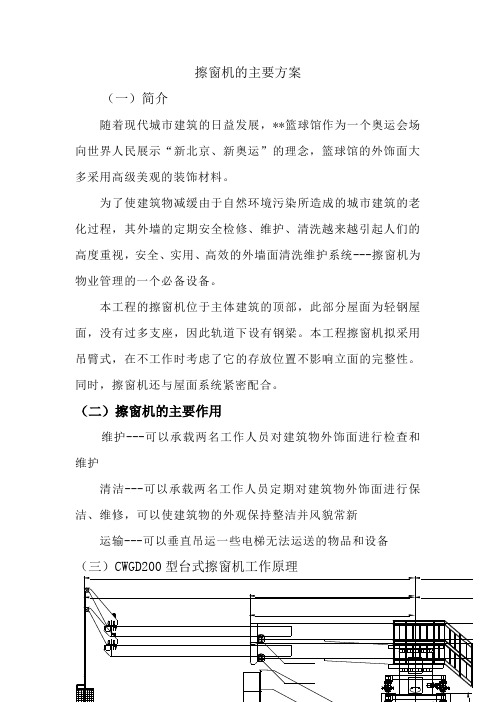
(一)简介
随着现代城市建筑的日益发展,**篮球馆作为一个奥运会场向世界人民展示“新北京、新奥运”的理念,篮球馆的外饰面大多采用高级美观的装饰材料。
为了使建筑物减缓由于自然环境污染所造成的城市建筑的老化过程,其外墙的定期安全检修、维护、清洗越来越引起人们的高度重视,安全、实用、高效的外墙面清洗维护系统---擦窗机为物业管理的一个必备设备。
本工程的擦窗机位于主体建筑的顶部,此部分屋面为轻钢屋面,没有过多支座,因此轨道下设有钢梁。
本工程擦窗机拟采用吊臂式,在不工作时考虑了它的存放位置不影响立面的完整性。
同时,擦窗机还与屋面系统紧密配合。
(二)擦窗机的主要作用
维护---可以承载两名工作人员对建筑物外饰面进行检查和维护
清洁---可以承载两名工作人员定期对建筑物外饰面进行保洁、维修,可以使建筑物的外观保持整洁并风貌常新
运输---可以垂直吊运一些电梯无法运送的物品和设备(三)CWGD200型台式擦窗机工作原理
(四)CWGD200型台式擦窗机技术参数
(五)质量承诺及售后服务
1、保修期:
自工程合格交验之日起十二个月为保修期,提供免费维护保养,更换损坏的零部件。
质保期满后,双方可以签定优惠的维护保养合同。
2、质量保证措施:
A、工程预埋时,本公司即派人员指导现场预埋工作,确保工程的质量与工期;
B、整机设计符合国家有关标准;
C、所有电机减速机均采用国际名牌产品,品质优良,所有钢制悬挂件均采用国内优质钢材,表面经热浸镀锌防腐处理。
擦窗机技术性能说明-new(伸缩臂)

文件编号:CA2007-0315(BJ)工程名称:广州电视塔业主单位:擦窗机设备设计及供应北京施捷达通机电技术有限公司二零零七年三月十五日一.擦窗机设备布置介绍二.擦窗机设备适用标准及使用环境要求三.擦窗机设备技术性能四.设备清单及主要配置参照珠海晶艺提供的广州电视塔的屋顶平面图及A-A、B-B、C-C、D-D、E-E的剖面图,我公司依据设备应高效率、高安全、高性能的设计原则,设计如下擦窗机方案在标高454.000、355.200、168.000、116.000、38.000的结构平面沿女儿墙内侧布置水平工字钢轨道,在轨道上分别布置CWG250屋面轨道式卷扬擦窗机。
1、在最上层的454平面上布置的擦窗机型号为CWG250LS立柱伸缩、吊篮伸缩的擦窗机一台,立柱伸缩4米,吊篮伸缩3米,起升高度100米。
负责标高355米以上外立面的维保,;由于建筑屋外立面收缩距离很大,在钢结构的外表面每隔40米设一圈钢丝绳约束装置。
2、在标高为平面上355.200布置的擦窗机型号为CWG250S立柱伸缩、吊篮伸缩的擦窗机一台,负责标高355米以下、168米以上外立面的维保,吊篮伸缩3米、起升高度190米;由于建筑屋外立面收缩距离很大,在钢结构的外表面每隔40米设一圈钢丝绳约束装置。
3、在标高为平面上168.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度60米。
负责标高168米以下、116米以上外立面的维保;4、在标高为平面上116.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度80米。
负责标高116米以下、38米以上外立面的维保;5、在标高为平面上38.000布置的擦窗机型号为CWG250BS大臂伸缩擦窗机一台,起升高度40米。
负责标高38米以下外立面的维保;1、设计制造符合以下标准:擦窗机符合中华人民共和国《GB19154-2003擦窗机》及《GB19155-2003 高处作业吊篮》标准参照执行BS6037标准或欧洲标准prEN1808。
擦窗方案说明

擦窗方案说明擦窗方案说明本方案在主楼标高164.4米结构屋面设置一台单臂卷扬式整机进口擦窗机设备,轨道采用Q235H型钢,表面处理采用热浸锌。
擦窗机设备选用荷兰LALESSE公司产品,轨道布置及擦窗机设备参考见附图一中系统一。
对于西北裙房处,根据提供的剖面资料采用单轨系统,单轨轨道采用工字钢,表面处理采用热浸锌。
轨道及埋件布置参考附图一中系统二。
具体需要有关建筑结构设计配合。
东面裙房处北部分由主楼擦窗机处理,其余部分采用插杆系统即可,插杆基础埋件布置见附图一中系统三。
电动爬升吊篮和系统二共用。
主楼擦窗机设备自重、轮压及轨道埋件情况等可分别参考附图二。
裙房擦窗机系统可参考附图一中A-A、B-B等视图。
LALESSE SA-300双人爬升式吊船规格和技术性能数据1. 总描述该设备由欧洲荷兰LALESSE公司制造,型号为SA-300,双人爬升式吊船,其工作范围为裙房部分玻璃幕墙。
擦窗机设计的正常操作工作环境为:环境温度 - 10°C ~ + 40°C空气相对湿度不超过90%作业人员工作处,风速小于10.8m/s(相当于阵风6级)2. ‘Lalesse’公司SA-300双人爬升式吊船2.1 型号为Lalesse SA-300双人爬升式吊船,外形构造如厂商说明书中所述,全部由铝合金型材制造,底板采用铝合金网纹板, 四边栏杆构架式设计,全部采用氩弧焊惰性气体焊接方式,受力件以镀锌高强度螺栓连接,吊船外前方设橡胶滚轮2只,以减少与玻璃幕墙之间的碰撞力,滚轮的外伸距离可以调节,以适合吊船与玻璃幕墙之间不同的距离需要,吊船底部有四只活动滚轮,可使吊船在地面方便地移动。
2.2 传动机构外形构造如厂商说明书所描述,每只传动机构的额定载荷为 400kg,并设有弹簧/电磁制动和离心力式制动器,传动机构由一台三相感应式电机通过一组二级齿轮箱驱动,齿轮箱为全封闭油润滑设计,具有很长的设计寿命,在电源中断时,传动机构可以进行手动操作,以便将吊船降至地面,整套传动机构包括电机和齿轮箱的外罩都以铝合金制造。
02、一种多功能擦玻璃器设计方案
一种多功能擦玻璃器设计方案设计思路:目前的擦玻璃器具结构比较简单,功能比较单一。
不方便擦除多种情况下弄脏的玻璃。
发明目的:是提供一种使用方便、具有多功能的擦玻璃器。
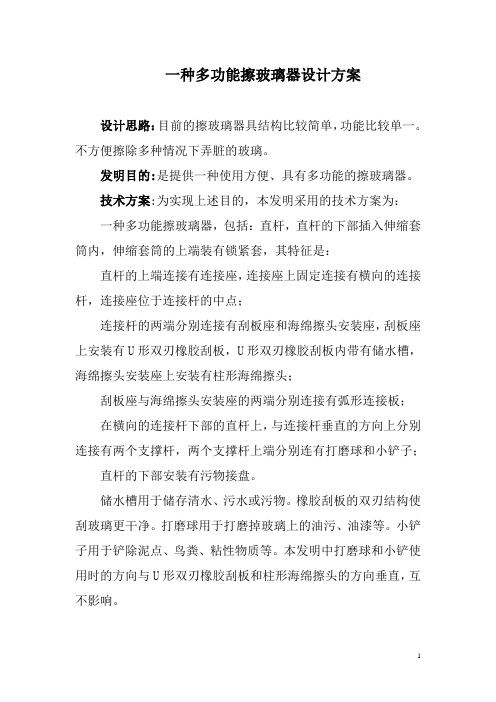
技术方案:为实现上述目的,本发明采用的技术方案为:一种多功能擦玻璃器,包括:直杆,直杆的下部插入伸缩套筒内,伸缩套筒的上端装有锁紧套,其特征是:直杆的上端连接有连接座,连接座上固定连接有横向的连接杆,连接座位于连接杆的中点;连接杆的两端分别连接有刮板座和海绵擦头安装座,刮板座上安装有U形双刃橡胶刮板,U形双刃橡胶刮板内带有储水槽,海绵擦头安装座上安装有柱形海绵擦头;刮板座与海绵擦头安装座的两端分别连接有弧形连接板;在横向的连接杆下部的直杆上,与连接杆垂直的方向上分别连接有两个支撑杆,两个支撑杆上端分别连有打磨球和小铲子;直杆的下部安装有污物接盘。
储水槽用于储存清水、污水或污物。
橡胶刮板的双刃结构使刮玻璃更干净。
打磨球用于打磨掉玻璃上的油污、油漆等。
小铲子用于铲除泥点、鸟粪、粘性物质等。
本发明中打磨球和小铲使用时的方向与U形双刃橡胶刮板和柱形海绵擦头的方向垂直,互不影响。
结构示意图:附图中:1、直杆;2、刮板座;3、U形双刃橡胶刮板;4、弧形连接板;5、打磨球;6、支撑杆;7、污物接盘;8、锁紧套;9、伸缩套筒;10、支撑杆;11、小铲子;12、海绵擦头安装座;13、柱形海绵擦头;14连接座;15、连接杆。
具体实施方式下面结合附图和具体实施例对本发明作进一步说明:本发明多功能擦玻璃器如图1所示,包括:直杆1,直杆1的下部插入伸缩套筒9内,伸缩套筒9的上端装有锁紧套8。
直杆1的上端连接有连接座14,连接座14上固定连接有横向的连接杆15,连接座14位于连接杆15的中点。
连接杆15的两端分别连接有刮板座2和海绵擦头安装座12,刮板座2上安装有U形双刃橡胶刮板3,U形双刃橡胶刮板3内带有储水槽,储水槽用于储存清水、污水或污物。
橡胶刮板的双刃结构使刮玻璃更干净。
裙房屋顶擦窗机详图,擦窗机方案图纸几套附件

擦窗机方案样本
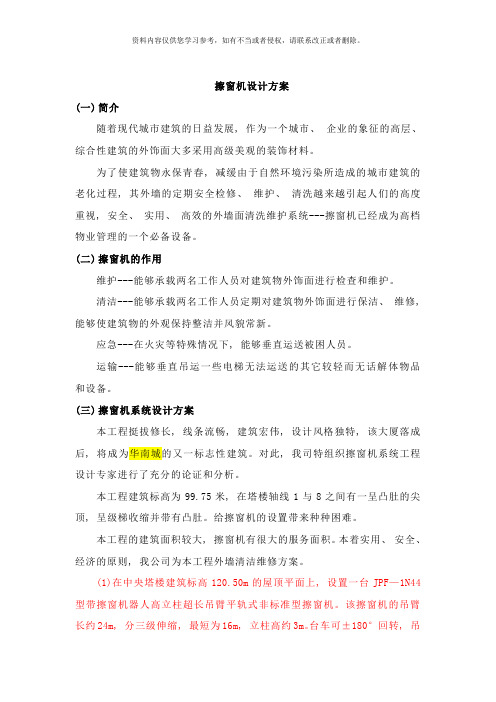
擦窗机设计方案(一)简介随着现代城市建筑的日益发展, 作为一个城市、企业的象征的高层、综合性建筑的外饰面大多采用高级美观的装饰材料。
为了使建筑物永保青春, 减缓由于自然环境污染所造成的城市建筑的老化过程, 其外墙的定期安全检修、维护、清洗越来越引起人们的高度重视, 安全、实用、高效的外墙面清洗维护系统---擦窗机已经成为高档物业管理的一个必备设备。
(二)擦窗机的作用维护---能够承载两名工作人员对建筑物外饰面进行检查和维护。
清洁---能够承载两名工作人员定期对建筑物外饰面进行保洁、维修, 能够使建筑物的外观保持整洁并风貌常新。
应急---在火灾等特殊情况下, 能够垂直运送被困人员。
运输---能够垂直吊运一些电梯无法运送的其它较轻而无话解体物品和设备。
(三)擦窗机系统设计方案本工程挺拔修长, 线条流畅, 建筑宏伟, 设计风格独特, 该大厦落成后, 将成为华南城的又一标志性建筑。
对此, 我司特组织擦窗机系统工程设计专家进行了充分的论证和分析。
本工程建筑标高为99.75米, 在塔楼轴线1与8之间有一呈凸肚的尖顶, 呈级梯收缩并带有凸肚。
给擦窗机的设置带来种种困难。
本工程的建筑面积较大, 擦窗机有很大的服务面积。
本着实用、安全、经济的原则, 我公司为本工程外墙清洁维修方案。
(1)在中央塔楼建筑标高120.50m的屋顶平面上, 设置一台JPF—1N44型带擦窗机器人高立柱超长吊臂平轨式非标准型擦窗机。
该擦窗机的吊臂长约24m, 分三级伸缩, 最短为16m, 立柱高约3m。
台车可±180°回转, 吊臂头是带回转支承的仰角臂头, 可±90°回转。
壁虎II型机器人( 见清华紫光高层建筑擦窗机产品简介PJPF—1N4414型) , 是全自动机器人。
当擦窗机工作57.50m高度时, 悬挂吊篮的钢丝绳, 已与凸肚玻璃幕墙相切, 此时凸肚以下的幕墙凹进深度为1.2 —1.5m, 该处的玻璃幕无法清洗, 只能机器人来完成。
擦玻璃机器人设计方案

擦玻璃机器人设计方案1. 引言随着人工智能和机器人技术的发展,智能家居设备受到了越来越多的关注。
在智能家居设备中,擦玻璃机器人被广泛应用。
它能够自动擦拭窗户和玻璃表面,为用户提供便利。
本文将介绍一种擦玻璃机器人的设计方案,包括机器人的硬件和软件设计等内容。
2. 设计方案2.1 硬件设计擦玻璃机器人的硬件设计包括机器人结构、传感器、执行器等方面。
2.1.1 机器人结构擦玻璃机器人的结构应具有稳定性和灵活性。
设计一个轻巧、坚固的机器人框架,并在其上安装能够自由移动的擦拭模块。
2.1.2 传感器擦玻璃机器人需要搭载多个传感器来感知周围环境,包括距离传感器、倾斜传感器等。
距离传感器用于测量机器人与窗户之间的距离,倾斜传感器用于检测机器人是否垂直于窗户表面。
2.1.3 执行器擦玻璃机器人需要装备执行器来完成擦拭任务。
常用的执行器包括轮子和电动机,以及机械臂和刷子等。
机械臂用于固定机器人在窗户上,刷子用于擦拭玻璃表面。
2.2 软件设计2.2.1 控制算法擦玻璃机器人的控制算法需要保证机器人能够准确地擦拭玻璃表面。
控制算法可以采用视觉识别技术来定位玻璃表面,并根据传感器的反馈来调整机器人的动作。
2.2.2 自动避障擦玻璃机器人在工作过程中需要自动避免障碍物。
设计一个避障算法,将传感器数据与机器人的运动轨迹相结合,使机器人能够相应地避开障碍物。
2.2.3 用户界面为了方便用户操作,擦玻璃机器人需要设计一个用户界面。
用户界面可以通过手机应用程序或者触摸屏来实现,用户可以通过界面控制机器人的运动和开始/停止擦拭任务。
3. 实施计划3.1 硬件实施按照设计方案,实施机器人的硬件部分,包括机器人结构的制作、传感器和执行器的安装等。
确保机器人结构稳定、传感器准确无误,并能够正常工作。
3.2 软件实施按照设计方案,实施机器人的软件部分,包括控制算法的编码、避障算法的实现以及用户界面的开发。
测试软件的功能,确保机器人能够根据用户界面的指示进行操作,并能够自动避免障碍物。
CWGS型擦窗机机座及行走部件设计

毕业设计说明书毕业设计题目CWGS型擦窗机机座及行走部件设计学院专业班级学生姓名性别男指导教师职称讲师2011年月日摘要随着高层建筑的出现,其外端墙面或玻璃幕墙外表面的清洗与维护的难题,就摆在了人们的面前。
传统的解决方法为,一是搭建脚手架,耗费太大;二是用绳索将操作者悬吊下降,危险性极大。
擦窗机应运而生,擦窗机是在起重机械的基础上发展而来的一类建筑专用机械。
从字面上理解是擦窗户的机器;但从实际使用的角度理解,是一种具有能够升降的吊篮及其悬吊机构,适用于建筑物外墙面的清洗、维护和紧急情况下的应急载人机械设备。
擦窗机的总类包括水平轨道式、附墙轨道式、轮载式、插杆式、悬挂轨道式、滑梯式。
本次设计为水平轨道式擦窗机,擦窗机主要结构有台车行走机构、台车、吊臂回转机构、吊船升降机构、吊船旋转机构、协助卷绕机构、船体、过载保护装置、防撞保护装置、行程限位保护装置。
整个机器由本组成员四人一起负责设计,本人负责机座及行走部件的设计,包括主动轮组、托盘部件、机座、旋转吊臂、从动轮组、平衡臂滑轮组、回转减速箱。
关键词:擦窗机;底座;主动轮组;回转减速器As high-rise building dozen appear, outside its end tope or glass curtain wall outer surface of cleaning and maintenance problem, right in front of people's presence. Traditional solutions, a scaffold, cost is set too large; But with the rope will decline, danger operator suspension. Gondola emerged, Gondola is in hoisting machinery and develops on the basis of a kind of architectural special-purpose machinery. Literally understanding is cleaning the Windows machines; But from the Angle of actual use of understanding, is a kind of very can lift the hanging baskets and suspended institutions, suitable for buildings have clean and maintenance and outside the emergency manned mechanical equipment. Emergency The total category includes wipe window machine track type, level of wall rail type, wheel attached carrying type, insert pole type, hanging rail type, slide type. This design for horizontal rail type brush window machine, rub window machine main structure have car walk institutions, trolley, auto go institutions, arm swing mechanism, ship lifting mechanism, ship rotating mechanism, help winding institutions, hull, carrier protection device and bump protection device, Cheng Xian a protection device. The whole machine group members by the four friends responsible for design, I was responsible for the design of seating and walking components, including active wheel, tray parts, base, rotating the arm, driven wheels, balance arm pulleys, slewing reducer.Keywords: Gondola;Lamp stand;Active wheel set;Slewing drive第一章前言 (1)1.1课题的提出 (1)1.2概述 (2)第二章设备结构介绍 (3)2.1台车 (3)2.1.1台车行走机构 (3)2.1.2 吊臂回转机构 (3)2.1.3 吊船升降机构 (3)2.1.4 吊船旋转机构 (3)2.1.5 辅助卷绕机构 (4)2.2 吊船 (4)2.2.1 吊船体 (4)2.2.2 限载保护装置 (4)2.2.3 防撞保护装置 (4)2.2.4 行程限位保护装置 (4)第三章设计要求 (5)3.1主要技术参数及工作、存放条件 (5)3.1.1主要技术参数 (5)3.1.2 工作条件 (5)3.1.3 存放条件 (5)3.2 一般要求 (6)3.3 系统结构的要求 (6)3.3.1工作平台的要求 (6)3.3.2提升机构的要求 (6)3.3.3安全装置要求 (6)3.3.4钢丝绳的要求 (7)3.3.5悬挂机构的要求 (7)3.3.6电气系统的要求 (8)3.4 工作平台承载要求 (8)3.5 工作平台的安装、拆除的要求 (8)第四章电气系统 (10)4.1 主电路 (10)4.2 控制电路 (10)4.3主电控箱 (10)4.4 安全保护装置 (11)第五章使用方法 (12)5.1 准备阶段 (12)5.2 工作阶段 (13)5.3 结束阶段 (13)第六章擦窗机轮压分析计算及校核 (15)6.1轮压分析计算 (16)6.1.1伸缩臂在最大幅度,平衡重在最大幅度时 (18)6.1.2伸缩臂在最小幅度,平衡重在最小幅度时 (18)6.1.3伸缩臂在最小幅度,平衡重仍在最大幅度时,即平衡重设计时不考虑移动 (19)6.2轮压校核 (20)6.2.1设备工作,停机时轮压校核计算: (20)6.2.2在工作状态时,臂架处于支承面45度角时,各轮轮压: (22)6.2.3在停车状态时最大轮压 (23)6.3结论 (25)第七章技术经济性分析 (26)7.1中国擦窗机行业前景分析 (26)7.2市场竞争分析 (26)7.3发展趋势 (28)第八章结论 (29)参考文献 (30)致谢 (31)附录一: (1)附录二 (13)第一章前言1.1课题的提出随着城市的现代化,一座座高楼拔地而起。
擦窗机设计方案及报价样表
收集精品文档============================= ================================= ==========================================某建筑大厦外牆清洗系統設計、供應及安裝工程初步技術方案及报价方案编号PH/SA-Q2006/316日期:2008年9月10日製作單位某设备有限公司工程名称:某建筑大厦工程项目:擦窗机项目报价方案目录1. 方案说明==============================专业收集精品文档收集精品文档============================================================== ==========================================2. 技术参数3. 初步交货及安装周期4. 由它方完成的工作5. 设备性能及设备配置6. 设备布置图/设备设计图7. 维保服务内容8. 价格明细表1、方案说明依据[某建筑大厦]的建筑特点和业主有关擦窗机的基本要求方案+ 147.800m屋顶依据[某建筑大厦]的建筑特点和业主有关擦窗机的基本要求,在大厦屋面(+147.800m标高)上部布置擦窗机水平轨道(见擦窗机轨道布置图),并配置一台由我司设计制造的有轨单臂仰幅型擦窗机(见擦窗机设备图),悬臂可工作距离为25米,设备型号为CDG200YB25。
==============================专业收集精品文档收集精品文档============================= ================================= ==========================================2、擦窗机主要技术参数2.1中国POINT擦窗机,型号PCDG200YB251) 有效荷载250 kg2) 工作高度168 m3) 工作篮尺寸2000(长) ×650(宽) ×1160(高) mm4)电源特性3x380 v,50Hz5)主臂距离25m(主回转中心至吊篮中心)6) 升降速度9m/min7) 行走速度6m/min8)主回转速度12m/min9)吊篮回转角度±9010)钢丝绳安全系数>1011)轨距3500 mm==============================专业收集精品文档收集精品文档============================= ================================= ==========================================12)轨道断面H 200 X 20013)操作方式台车控制及吊船互换操作14)控制信号传送由内藏于钢缆中的铜芯传送15)通讯设施吊篮-台车电话通讯16)设备防锈热浸锌及油漆17)生产标准GB19154-2003,欧盟标准EN180818)设备自重~29吨(上述技术数据以厂方最终设计及业主图纸最终审批为准)3. 初步交货及安装周期3.1 设备交货期为设备图确认后135天。
擦窗机设计方案案例

擦窗机设计方案(一)简介随着现代城市建筑的日益发展,作为一个城市、企业的象征的高层、综合性建筑的外饰面大多采用高级美观的装饰材料。
为了使建筑物永保青春,减缓由于自然环境污染所造成的城市建筑的老化过程,其外墙的定期安全检修、维护、清洗越来越引起人们的高度重视,安全、实用、高效的外墙面清洗维护系统---擦窗机已经成为高档物业管理的一个必备设备。
(二)擦窗机的作用维护---可以承载两名工作人员对建筑物外饰面进行检查和维护。
清洁---可以承载两名工作人员定期对建筑物外饰面进行保洁、维修,可以使建筑物的外观保持整洁并风貌常新。
应急---在火灾等特殊情况下,可以垂直运送被困人员。
运输---可以垂直吊运一些电梯无法运送的物品和设备。
(三)擦窗机系统设计方案本工程挺拔修长,线条流畅,建筑宏伟,设计风格独特,该大厦落成后,将成为华南城的又一标志性建筑。
对此,我司特组织擦窗机系统工程设计专家进行了充分的论证和分析。
本工程建筑标高为99.75米,在塔楼轴线1与8之间有一呈凸肚的尖顶,呈级梯收缩并带有凸肚。
给擦窗机的设置带来种种困难。
本工程的建筑面积较大,擦窗机有很大的服务面积。
本着实用、安全、经济的原则,我公司为本工程外墙清洁维修方案。
(1)在中央塔楼建筑标高120.50m的屋顶平面上,设置一台JPF—1N44型带擦窗机器人高立柱超长吊臂平轨式非标准型擦窗机。
该擦窗机的吊臂长约24m,分三级伸缩,最短为16m,立柱高约3m。
台车可±180°回转,吊臂头是带回转支承的仰角臂头,可±90°回转。
壁虎II型机器人(见清华紫光高层建筑擦窗机产品简介P14JPF—1N44型),是全自动机器人。
当擦窗机工作57.50m高度时,悬挂吊篮的钢丝绳,已与凸肚玻璃幕墙相切,此时凸肚以下的幕墙凹进深度为1.2 —1.5m,该处的玻璃幕无法清洗,只能机器人来完成。
机器人能沿着幕墙自动上、下行走,擦洗墙面。
擦窗机
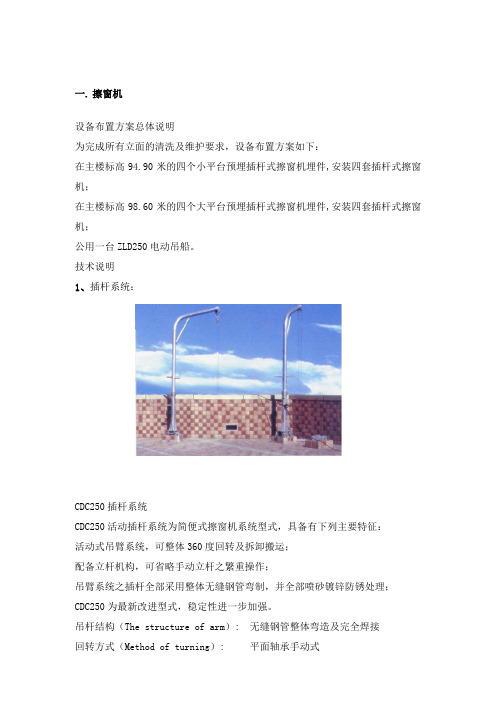
一. 擦窗机设备布置方案总体说明为完成所有立面的清洗及维护要求,设备布置方案如下:在主楼标高94.90米的四个小平台预埋插杆式擦窗机埋件,安装四套插杆式擦窗机;在主楼标高98.60米的四个大平台预埋插杆式擦窗机埋件,安装四套插杆式擦窗机;公用一台ZLD250电动吊船。
技术说明1、插杆系统:CDC250插杆系统CDC250活动插杆系统为简便式擦窗机系统型式,具备有下列主要特征:活动式吊臂系统,可整体360度回转及拆卸搬运;配备立杆机构,可省略手动立杆之繁重操作;吊臂系统之插杆全部采用整体无缝钢管弯制,并全部喷砂镀锌防锈处理;CDC250为最新改进型式,稳定性进一步加强。
吊杆结构(The structure of arm): 无缝钢管整体弯造及完全焊接回转方式(Method of turning): 平面轴承手动式单杆重量(Weight of arm): 65kg(About)表面处理(Finishing): 喷砂及热浸镀锌安全载荷(Safety Load):650kg执行标准(standards):BS6037JC/T5032~JC/T50342.电动吊船系统:ZLD250电动吊船技术参数表升降速度(speed of hoisting):8-9m/min额定载荷(rate load):250kg(for 3 person)操作方式(type of controlling):按钮方式(by button)控制信号传送(translating of signal):专用电缆(cable)100m通信信号传送(communication translate):对讲机(speaker)1set供电电源(power supply):380v, 50HZ, 2x1.1kw适用高度(scope of hoisting):<120m吊篮尺寸(dimension of cradle):2000X650X1100mm钢丝绳(wire):Φ8.3mmX4根X100m安全系数(factor of safety):>12整机重量(wet weight): 250Kg(about)执行标准(standards):BS6037JC/T5032~JC/T5034ZLD250电动吊船整机特点及性能说明:ZLD250电动吊船为国内外最新型式的建筑外墙清洗及维护常设性吊船,在原有基础上改进了提升性能和安全性能等多项指标参数,所用动力提升机(Hoisting device)及安全锁(Safety lock)等关键部件引用卢森堡原装进口产品, ZLD250吊船包括标准型吊篮结构体、2台动力提升机、2台安全锁、2台收缆器、各项安全系统、电器控制系统和独立安全保护系统:(1)吊篮结构全部由高强铝合金组成,四周有铝板封闭和防护,吊篮包括以下附件:a、工作人员用的安全带和缆扣2套;b、电控箱和手握式操作盘,人员在吊篮里执行控制动作:升降、急停、报警等;c、无线通讯对讲装置一套;d、吊篮防撞防倾翻保护系统;e、吊篮设有2个软橡胶靠墙轮系统,保证吊篮靠墙时不会损伤幕墙;f、真空玻璃吸盘:2套,在刮风期间起定位和导向作用;(2)左右两台动力提升机为吊篮上下运动的动力来源,通过电机驱动摩擦盘来爬升,从而使吊篮升降运动,提升机配有制动器,当吊篮停止运动时,可马上制动使吊篮稳固停止在任一位置,提升机电机为2x1.1kw,爬升及下降速度一样为8.5米/分,自重为46kg,供电要求为50Hz,380v电源,电气及机械部分完全符合标准。
擦窗机
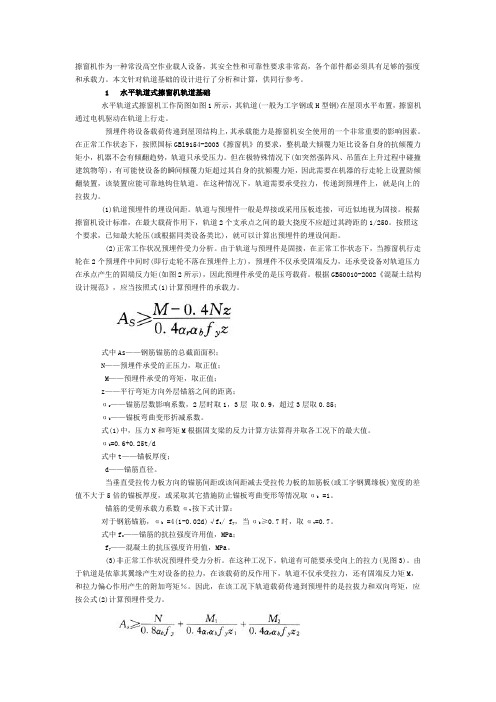
擦窗机作为一种常没高空作业载人设备,其安全性和可靠性要求非常高,各个部件都必须具有足够的强度和承载力。
本文针对轨道基础的设计进行了分析和计算,供同行参考。
1 水平轨道式擦窗机轨道基础水平轨道式擦窗机工作简图如图1所示,其轨道(一般为工字钢或H型钢)在屋顶水平布置,擦窗机通过电机驱动在轨道上行走。
预埋件将设备载荷传递到屋顶结构上,其承载能力是擦窗机安全使用的一个非常重要的影响因素。
在正常工作状态下,按照国标GBl9154-2003《擦窗机》的要求,整机最大倾覆力矩比设备自身的抗倾覆力矩小,机器不会有倾翻趋势,轨道只承受压力。
但在极特殊情况下(如突然强阵风、吊篮在上升过程中碰撞建筑物等),有可能使设备的瞬间倾覆力矩超过其自身的抗倾覆力矩,因此需要在机器的行走轮上设置防倾翻装置,该装置应能可靠地钩住轨道。
在这种情况下,轨道需要承受拉力,传递到预埋件上,就是向上的拉拔力。
(1)轨道预埋件的埋设间距。
轨道与预埋件一般是焊接或采用压板连接,可近似地视为固接。
根据擦窗机设计标准,在最大载荷作用下,轨道2个支承点之间的最大挠度不应超过其跨距的1/250。
按照这个要求,已知最大轮压(或根据同类设备类比),就可以计算出预埋件的埋设间距。
(2)正常工作状况预埋件受力分析。
由于轨道与预埋件是固接,在正常工作状态下,当擦窗机行走轮在2个预埋件中间时(即行走轮不落在预埋件上方),预埋件不仅承受固端反力,还承受设备对轨道压力在承点产生的固端反力矩(如图2所示),因此预埋件承受的是压弯载荷。
根据GB50010-2002《混凝土结构设计规范》,应当按照式(1)计算预埋件的承载力。
式中As——钢筋锚筋的总截面面积;N——预埋件承受的正压力,取正值;M——预埋件承受的弯矩,取正值;z——平行弯矩方向外层锚筋之间的距离;αr——锚筋层数影响系数,2层时取1,3层取0.9,超过3层取0.85;αb——锚板弯曲变形折减系数。
式(1)中,压力N和弯矩M根据固支梁的反力计算方法算得并取各工况下的最大值。
擦窗方案说明

擦窗方案说明本方案在主楼标高164.4米结构屋面设置一台单臂卷扬式整机进口擦窗机设备,轨道采用Q235H型钢,表面处理采用热浸锌。
擦窗机设备选用荷兰LALESSE公司产品,轨道布置及擦窗机设备参考见附图一中系统一。
对于西北裙房处,根据提供的剖面资料采用单轨系统,单轨轨道采用工字钢,表面处理采用热浸锌。
轨道及埋件布置参考附图一中系统二。
具体需要有关建筑结构设计配合。
东面裙房处北部分由主楼擦窗机处理,其余部分采用插杆系统即可,插杆基础埋件布置见附图一中系统三。
电动爬升吊篮和系统二共用。
主楼擦窗机设备自重、轮压及轨道埋件情况等可分别参考附图二。
裙房擦窗机系统可参考附图一中A-A、B-B等视图。
LALESSE SA-300双人爬升式吊船规格和技术性能数据1. 总描述该设备由欧洲荷兰LALESSE公司制造,型号为SA-300,双人爬升式吊船,其工作范围为裙房部分玻璃幕墙。
擦窗机设计的正常操作工作环境为:环境温度 - 10°C ~ + 40°C空气相对湿度不超过90%作业人员工作处,风速小于10.8m/s(相当于阵风6级)2. ‘Lalesse’公司SA-300双人爬升式吊船2.1 型号为Lalesse SA-300双人爬升式吊船,外形构造如厂商说明书中所述,全部由铝合金型材制造,底板采用铝合金网纹板, 四边栏杆构架式设计,全部采用氩弧焊惰性气体焊接方式,受力件以镀锌高强度螺栓连接,吊船外前方设橡胶滚轮2只,以减少与玻璃幕墙之间的碰撞力,滚轮的外伸距离可以调节,以适合吊船与玻璃幕墙之间不同的距离需要,吊船底部有四只活动滚轮,可使吊船在地面方便地移动。
2.2 传动机构外形构造如厂商说明书所描述,每只传动机构的额定载荷为 400kg,并设有弹簧/电磁制动和离心力式制动器,传动机构由一台三相感应式电机通过一组二级齿轮箱驱动,齿轮箱为全封闭油润滑设计,具有很长的设计寿命,在电源中断时,传动机构可以进行手动操作,以便将吊船降至地面,整套传动机构包括电机和齿轮箱的外罩都以铝合金制造。
玻璃清洁机器人吸附机构设计含全套说明书和CAD图纸
题目:玻璃清洁机器人吸附机构设计摘要高楼玻璃幕墙清洗机器人是特种机器人的一个分支。
它是基于壁面移动机器人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,提出了分层次规划的体系结构。
在此基础上,对机器人总体结构进行了设计分析,并应用有关计算理论和计算软件进行了主要参数设计和关键部件的结构设计,讨论了机器人的作业路径,运动控制规划及吸附机构的设计,最后,应用Pro/ENG三维软件针对所设计的机器人建立了三维实体模型。
关键词:玻璃幕墙清洗,机器人,运动分析ABSTRACTGlass-wallcleaning robot isone of robotfor l imited operation,whichcan walk on Vertical glass-wall with washing devices.It is arobot with specific applied functions,Based on wall-climbing robot techniques.forspecific objects.And it works on vertical Glass-wall,whereis dangerousfor human beings.It isa robot could conquer the gravity effect and carry cleaningequipments,facing to glass-wall surface beautifying service of modern high-rise buildings.Firstly, the whole frame ofthe glass wall cleaning robot is introduced, and theLevel-based planning is discussed also. Based on this, th edesigning and analyzing Ofthe structure of the robot are described in details,the main parameters designing and structure designing of the key parts are also processed by using some of correlative calculating theories andsoft .Then,mission-orientedand localmotion planningare discussed.At last,three-dimensional model of the robot are established byMeans ofPro/ENGINEER,soft.Key words:Glass-wallcleaning robotvacuum adsorption system目录摘要2ﻩABSTRACT ................................................ 21前言. (3)2机器人总体方案规划 (4)2.1 机器人设计思想 (4)2.2外形尺寸选择6ﻩ3 吸附机构.............................................. 63.1吸附方式 (6)3.1.1吸附方式选择7ﻩ3.1.2吸盘结构简图7ﻩ3.1.3机器人控制原理图8ﻩ3.2吸附力分析 (9)3.2.1 材料选择9ﻩ3.2.2吸附力计算10ﻩ3.2.3系统抗倾覆计算........................... 103.3其他机构的选择11ﻩ3.3.1射流器选择11ﻩ3.3.2水泵和水管的选择........................ 123.3.3密封机构 (12)4 总结14ﻩ参考文献 (15)致谢16ﻩ1前言在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。
高层建筑擦窗机的选型与建筑设计要求
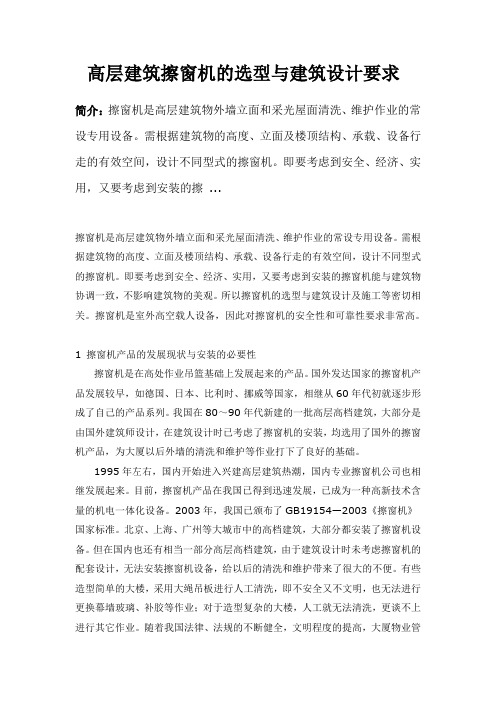
高层建筑擦窗机的选型与建筑设计要求简介:擦窗机是高层建筑物外墙立面和采光屋面清洗、维护作业的常设专用设备。
需根据建筑物的高度、立面及楼顶结构、承载、设备行走的有效空间,设计不同型式的擦窗机。
即要考虑到安全、经济、实用,又要考虑到安装的擦 ...擦窗机是高层建筑物外墙立面和采光屋面清洗、维护作业的常设专用设备。
需根据建筑物的高度、立面及楼顶结构、承载、设备行走的有效空间,设计不同型式的擦窗机。
即要考虑到安全、经济、实用,又要考虑到安装的擦窗机能与建筑物协调一致,不影响建筑物的美观。
所以擦窗机的选型与建筑设计及施工等密切相关。
擦窗机是室外高空载人设备,因此对擦窗机的安全性和可靠性要求非常高。
1 擦窗机产品的发展现状与安装的必要性擦窗机是在高处作业吊篮基础上发展起来的产品。
国外发达国家的擦窗机产品发展较早,如德国、日本、比利时、挪威等国家,相继从60年代初就逐步形成了自己的产品系列。
我国在80~90年代新建的一批高层高档建筑,大部分是由国外建筑师设计,在建筑设计时已考虑了擦窗机的安装,均选用了国外的擦窗机产品,为大厦以后外墙的清洗和维护等作业打下了良好的基础。
1995年左右,国内开始进入兴建高层建筑热潮,国内专业擦窗机公司也相继发展起来。
目前,擦窗机产品在我国已得到迅速发展,已成为一种高新技术含量的机电一体化设备。
2003年,我国已颁布了GB19154—2003《擦窗机》国家标准。
北京、上海、广州等大城市中的高档建筑,大部分都安装了擦窗机设备。
但在国内也还有相当一部分高层高档建筑,由于建筑设计时未考虑擦窗机的配套设计,无法安装擦窗机设备,给以后的清洗和维护带来了很大的不便。
有些造型简单的大楼,采用大绳吊板进行人工清洗,即不安全又不文明,也无法进行更换幕墙玻璃、补胶等作业;对于造型复杂的大楼,人工就无法清洗,更谈不上进行其它作业。
随着我国法律、法规的不断健全,文明程度的提高,大厦物业管理的建立,对其外墙的定期安全清洗及检修维护,已越来越引起人们的高度重视。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
赵征 侯志强 方案设计 李充
YAKJ2014-412
单元玻璃幕墙
玻璃幕 墙龙骨
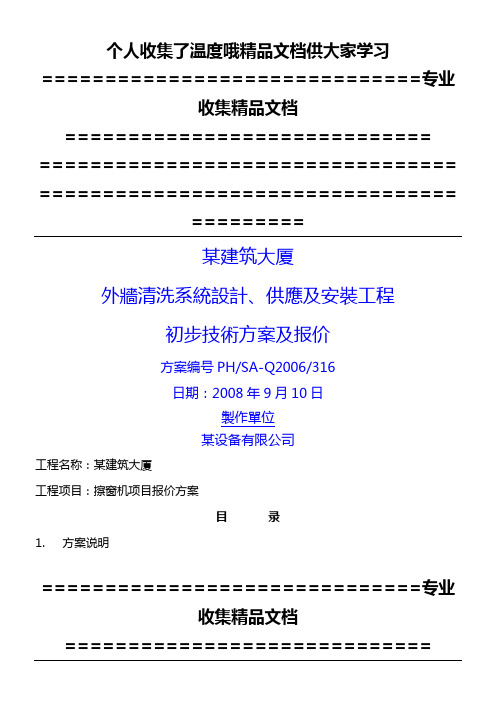
安装于玻璃幕墙上的三吸盘示意图
004
主要技术参数表: 配重 辅助卷扬机构 擦窗机型号 擦窗机名称 吊船额定载荷 ±180° 吊船 辅助吊钩载荷 工作臂长 工作高度 行走速度 起升速度 伸缩速度 主回转范围 主回转机构 行走机构 操作平台 辅篮 800 242.700 Rt(x2) 2000 Rd(x2) 4000 上回转范围 钢缆 装机容量 电源 吊篮尺寸 自重 YA/FWG20-50-250 轨道式擦窗机 250 Kg 700 Kg 5 m 250 m 2.9 -5.8 m/min 8 -10.5 m/min 4.7 m/min ±180° ±90° 直径7mm钢丝绳 7 KW AC 380V 50Hz 2000mmx700mmx1100mm
方案设计说明
图号 001 002 003 004 005 一、本图册为方案论证而做。 二、方案说明
在塔楼结构标高242.700米的结构面,施工安装176延米擦窗机专用 20b镀锌工字钢双轨道,在轨道上安装一台YA/FWG20-50-250轨道式擦窗 机,擦窗机吊臂最大水平长度5米。工作时,将吊船伸出幕墙外侧,设备 沿轨道行走,通过大小臂回转,使吊船接近要工作的外立面,由吊船内 工作人员完成标高245.900米以下外立面幕墙的清洗与维护。不工作时, 将吊船收至幕墙内,设备沿轨道停放,位置由业主指定。
擦窗机沿轨道行走最 远工作状态轮廓线
侯志强
2014年09月19日
赵征
穆俊鹏
方案设计
李充
YAKJ2014-412
003
提升钢缆
幕墙边线
此凹立面吊船配合玻璃 玻璃吸盘 吸盘拉近(逐渐贴近)凹 立面来完成清洁维护工作 擦窗机工作状态示意 擦窗机工作状态示意
擦窗机工作状态示意
擦窗机工作状态示意
吊船在立面不同位 置工作状态示意 吊船在立面不同位 置的工作状态示意 吊船在立面不同位 置的工作状态示意
于家堡金融起步区擦窗机方案设计图册
设计单位:北京世纪永安科技发展有限公司 日 期:2014年09月19日
图纸目录
序号 图纸名称 1 2 3 4 5
擦窗机轨道布置示意平面图 擦窗机专用防水电源插座布置示意平面图 擦窗机工作停放状态示意平面图 擦窗机工作、停放状态示意立面图 YA/FWG20-50-250轨道式擦窗机机型图
卷扬机构
245.900
吊钩
9750Kg(包括钢丝绳、电缆) 安全系数(钢缆) >12 设备作业率 设备无故障时间 手动滑降工作率 >98% >240 h >99% GB19154-2003
于家堡金融起步区
依据标准
700
2000
5000
吊船在最大幅度处工作时轨道的受力:(计算误差±10%)
说明: 1.环境条件 室外:温度-10~40℃,环境相对湿度不 大于90%(25℃) 抗风性能:工作时6M/S(4级) 停放时40M/S(12级) 2.电源条件 三相交流380V 50HZ 单相交流220V 50HZ 波动范围:电压±5%,频率±2% 3.防雷 擦窗机及附属设备的防雷接地装置与屋面防雷总 成相连,符合GB50057-2010标准 4.符合环境噪音标准GB3096-2008
于家堡金融起步区03-16地块
电源点五
擦窗机专用防水电源插座 布置示意平面图
YAKJ2014-412
2014年09月19日
方案设计
穆俊鹏
侯志强
1:220
赵征
李充
002
擦窗机停放状态示意
擦窗机工作状态示意
于家堡金融起步区03-16地块
擦窗机工作停放状态 示意平面图
1:220
注:因此立面为内凹斜面,固 需安装防风销座配合吊船来完 成此立面的清洁维护工作
~G=97.5KN 吊船方向 5.4KN Rt1
~G =9 7. 5K N
45° 15.6KN Rd1
10.5KN Rt1
38.5KN Rd1
005
于家堡金融起步区
吊船在立面不同位 置的工作状态示意
吊船在立面不同位 置的工作状态示意
屋面擦窗机轨道布置 工作及停放状态示意图
1:600
玻璃幕墙 玻璃幕墙龙骨 吊船在立面不同位 置的工作状态示意
单元玻璃幕墙
穆俊鹏
2014年09月19日
吊船在立面不同位 置的工作状态示意
玻璃幕墙填充物和结构密封胶 吊船和安全钢丝绳穿过此尼龙环此尼龙环与三 吸盘用尼龙绳连接(起防风摇摆安全作用); 用途:吊船在凹立面每下降二层用2个三吸盘将 吊船拉近(贴近)凹立面。 安装于玻璃幕墙上的三吸盘剖视图
1300
2000
R4 50 0
R45 00
2000
0 R250
0 50 R4
1300
于家堡金融起步区03-16地块
擦窗机轨道布置 示意平面图
1:220
侯志强
2014年09月19日
赵征
穆俊鹏
方案设计
李充
YAKJ2014-412
001
电源点二
电源点一
电源点三
电源点六
电源点四 三相五线防水电源插座 共设6个防水电源插座 插座由我司提供,由电气施工单位按照我司深 化后的轨道施工图上标示的位置布线并安装
三、配置特点:
此方案的最大优点是根据建筑的具体结构特点选用的擦窗机为标准 机型,技术成熟及应用广泛,设备自动化程序高,安全性和可靠性高,工 作效率高,能完成外立面幕墙的清洗维护工作。
1300
2000
00 R25
R25
00
R4500
200 0
113 2
R25 00
0 R250
R4500
2000
1300
YA/FWG20-50-250
轨道式擦窗机机型图
1:60 侯志强
2014年09月19日
船 方 向
吊
Rt2Biblioteka 2000 Rd2 Rd100 20
Rt2 10.5KN 2000
2000
Rd2 38.5KN
Rt2 15.6KN
2000
闫克军 穆俊鹏 方案设计 赵征
YAKJ2014-420
Rd2 60.5KN
Rt1