架空乘人装置技术规格书
煤矿固定抱索器架空乘人装置说明书

980
740
30
37
B3HV08-63
B3HV09-50
DYW250-450
DYW315-715
YLBZ25-120-18
YLBZ25-120-30
20
9
8
YB2-90L-4(380/660)
1.0
1.1
20 6×19S(φ 20)mm
29.117
22 6×19S(φ 22)mm
39.287
11.471
乘员跑动上下车
5、结构特征和工作原理 5.1 结构特征(见图 1)和传动系统(见附图)
5
图1 5.2 乘人装置的工作原理是:
将钢丝绳安装在驱动轮、托绳轮、压绳轮、迂回轮和张紧轮上,并经设有重锤的张紧 装置拉紧后,由驱动装置的电动机输出动力带动减速机上的驱动轮和钢丝绳作循环无极运行, 吊椅则通过抱索器与钢丝绳锁紧在运行的钢丝绳上,随钢丝绳上 行或下行,从而实现输送矿工的目的。其中钢丝绳通过尾部张紧装置张紧后,以维持钢丝绳 在托绳轮之间的挠度和张力。 5.3 该设备由驱动装置、托绳轮装置、压绳轮装置、迂回轮装置、张紧装置、乘人器、牵引 索、张紧索、电气控制装置等组成。
度可摘挂抱索器(K),双向固定 抱索器不注,单向活动抱索器(DH), 单向大坡度可摘挂抱索器(DK),单 向固定抱索器(D) 产品类型:架空乘人装置 示例 :采用交流电机传动,电液制动和重锤张紧,最大适用倾角35°,最大运输距离600m,驱动 功率为30kW,第一次修改的固定抱索器架空乘人装置:RJY30-35/600(A)。
架空乘人装置资料

架空乘人装置使用资料目录1. 概述2. 电控系统3. 运行4. 维护保养与故障排除1. 概述煤矿活动抱索器架空乘人装置是由防爆电机驱动、钢丝绳牵引, 用于煤矿井下的专用运人设备;该设备主要由驱动装置、回绳站、托绳轮组、压绳轮组、收绳轮组、活动吊椅、牵引钢丝绳、电控系统等组成。
电控系统由 PLC 控制,可实现系统失速、沿途拉线急停、重锤限位保护及语音提示、声光通讯功能。
高速工作制动器、安全制动器均为失效安全型, 制动可靠。
驱动装置通过基础固定在巷道底板上, 各电控箱放置在硐室内合理位置, 其余零部件通过架空的矿用工字钢横梁悬吊在巷道中;该设备具有配套齐全、结构简单、适用性强、安全高效等特点。
煤矿活动抱索器架空乘人装置配套的所有电器均为隔爆型或本安型,符合《煤矿安全规程》的有关规定。
装置使用在空气温度 0℃ -40℃、相对湿度不大于85%(环境温度为 20℃±5℃时 ,海拔高度不超过 1000米,无腐蚀性气体的环境中。
工作时, 周围空气中的煤尘、甲烷爆炸性气体不应超过《煤矿安全规程》中规定的浓度。
2. 电控系统架空乘人装置电气系统 (以下简称系统 ,主要控制架空乘人装置的主电机、电力液压推动器电机、泵站电机运行和停止;系统中的可编程控制器(PLC 是核心控制部件; 在遇有绳索超速, 或在巷道中遇有紧急情况, 可使架空乘人装置立即停车,从而保证架空乘人装置在运行使用中人员和设备的安全。
该系统中的所有控制部件和元器件完全按照国家有关规定和《煤矿安全标准》设计、制造,均符合《煤矿安全规程》中的有关规定。
可用于含有爆炸性气体(甲烷和煤尘的矿井中。
2.1 工作原理活动抱索器架空乘人装置电气系统图按照电路图正确完成所有电气接线的连接,并检查无误。
完成上述工作后, 即可给控制装置 380V (或 660V ,注意!隔爆腔内给本安腔供电的控制变压器, 原边应接在660V 端子上、 50Hz 的三相交流电源。
架空乘人装置

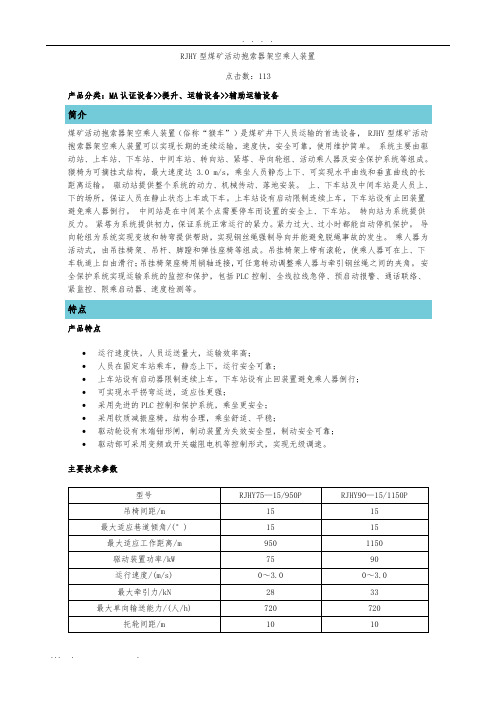
架空乘人装置RJHY型煤矿活动抱索器架空乘人装置点击数:113产品分类:MA认证设备>>提升、运输设备>>辅助运输设备简介煤矿活动抱索器架空乘人装置(俗称“猴车”)是煤矿井下人员运输的首选设备,RJHY型煤矿活动抱索器架空乘人装置可以实现长期的连续运输,速度快,安全可靠,使用维护简单。
系统主要由驱动站、上车站、下车站、中间车站、转向站、张紧塔、导向轮组、活动乘人器及安全保护系统等组成。
猴椅为可摘挂式结构,最大速度达 3.0 m/s,乘坐人员静态上下、可实现水平曲线和垂直曲线的长距离运输。
驱动站提供整个系统的动力、机械传动、落地安装。
上、下车站及中间车站是人员上、下的场所,保证人员在静止状态上车或下车。
上车站设有启动限制连续上车,下车站设有止回装置避免乘人器倒行。
中间站是在中间某个点需要停车而设置的安全上、下车站。
转向站为系统提供反力。
张紧塔为系统提供初张力,保证系统正常运行的张紧力。
张紧力过大、过小时都能自动停机保护。
导向轮组为系统实现变坡和转弯提供帮助,实现钢丝绳强制导向并能避免脱绳事故的发生。
乘人器为活动式,由吊挂椅架、吊杆、脚蹬和弹性座椅等组成。
吊挂椅架上带有滚轮,使乘人器可在上、下车轨道上自由滑行;吊挂椅架座椅用销轴连接,可任意转动调整乘人器与牵引钢丝绳之间的夹角。
安全保护系统实现运输系统的监控和保护,包括PLC控制、全线拉线急停、预启动报警、通话联络、张紧监控、限乘启动器、速度检测等。
特点产品特点•运行速度快,人员运送量大,运输效率高;•人员在固定车站乘车,静态上下,运行安全可靠;•上车站设有启动器限制连续上车,下车站设有止回装置避免乘人器倒行;•可实现水平拐弯运送,适应性更强;•采用先进的PLC控制和保护系统,乘坐更安全;•采用软质减振座椅,结构合理,乘坐舒适、平稳;•驱动轮设有末端钳形闸,制动装置为失效安全型,制动安全可靠;•驱动部可采用变频或开关磁阻电机等控制形式,实现无级调速。
架空乘人装置使用说明书

煤矿固定抱索器架空乘人装置产品使用说明书目录1、产品概述 (1)2、基本参数表 (2)3、结构特征与工作原理 (2)4、机械系统安装 (8)5、电气控制系统 (10)6、技术要求 (16)7、安全警示 (16)8、常见故障及处理方法 (17)9、安全操作规程 (19)10、乘坐人员须知 (20)11、日常维护保养 (21)煤矿固定抱索器架空乘人装置产品使用说明书1.产品概述煤矿架空乘人装置(以下简称乘人装置), 是煤矿井下辅助运输设备,主要是运送人员上下斜井或平巷之用。
它主要由驱动装置、托(压)绳装置、乘人器、尾轮装置、张紧装置、安全保护装置及电控装置等组成(见图1)。
乘人装置钢丝绳运行速度低,乘人离地不高,具有运行安全可靠、人员上下方便、随到随行、不需等待、一次性投入低、动力消耗小、操作简单、便于维护、工作人员少和运送效率高等特点,是一种新型的现代化煤矿井下人员输送设备。
1.1产品分类产品按抱索器型式分:煤矿固定抱索器架空乘人装置、煤矿活动抱索器架空乘人装置、煤矿大坡度可摘挂抱索器架空乘人装置、煤矿单向活动抱索器架空乘人装置、煤矿单向大坡度可摘挂抱索器架空乘人装置、煤矿单向固定抱索器架空乘人装置。
本说明书主要描述RJY系列煤矿固定抱索器架空乘人装置。
1.2产品的规格型号如下:RJ □□□-□/□□□□修改序号驱动方式:变频调速为P,直流调速为Z,液压调速为U,开关磁阻为D,交流电机不注张紧方式:液压张紧(Y),重锤张紧不注补充参数:最大适用倾角,单位为度(°)/最大运输距离,单位为米(m)。
主参数:驱动功率,单位为千瓦(kW)制动方式:液压站为Z,电液制动器为Y,气动为Q乘人装置类别:双向活动抱索器(H),双向大坡度可摘挂抱索器(K),双向固定抱索器不注,单向活动抱索器(DH),单向大坡度可摘挂抱索器(DK),单向固定抱索器(D)产品类型:架空乘人装置示例1:采用电液制动器制动和重锤张紧,最大适用倾角25°,最大运输距离1800m,功率为90kW的交流电机驱动,固定抱索器架空乘人装置: RJY90-25/1800。
架空式乘人装置设计
架空式乘人装置设计(说明书)目录摘要........................................... 错误!未定义书签。
第一章绪论 .. (3)1.1 煤矿架空乘人装置定义 (3)1.2 煤矿架空乘人装置的构成 (3)1.3 煤矿架空乘人装置结构特点及其布置 (3)第二章工作原理 (6)第三章基本结构设计 .............................. 错误!未定义书签。
3.1 驱动部分 (7)3.1.1 电动器 (7)3.1.2 减速器 (7)3.1.3 制动器的确定 (12)3.2乘人部分 (13)3.3托绳部分 (13)3.4 尾轮及张紧装置 (14)3.4.1 尾轮 (14)3.4.2 张紧绞车部分 (15)3.4.3 配重锤部分 (16)3.5 电控系统 (16)3.5.1电气控制及信号系统 (16)3.5.2保护功能 (17)第四章架空乘人装置设计计算 (18)4.1原始数据(以下数据为例计算) (18)4.2主要预选参数的确定 (18)4.3主要参数的计算及器型的选择 (19)第五章设计存在的问题及结构的改进 (27)5.1架空乘人车装置设计存在问题 (27)5.1.1架空乘人车设计的临界值和防滑验算 (27)5.1.2吊座间距 (27)5.2架空乘人车装置结构的改进 (27)5.2.1刹车装置的研制及应用 (27)5.2.2吊座与钢丝绳连接装置的改进 (28)致谢........................................... 错误!未定义书签。
参考文献.. (28)第一章绪论1.1 煤矿架空乘人装置定义矿用索道(架空乘人装置)主要用于矿井斜巷,平巷运送人员,其工作原理类似于地面旅游索道。
它通过电动器带动减速器上的摩擦轮作为驱动装置,采用架空的无极循环的钢丝绳作为牵引承载。
钢丝绳主要靠尾部张紧装置进行张紧,沿途依托绳轮支撑,以维持钢丝绳在托轮间的饶度和张力。
煤矿架空乘人装置

煤矿大坡度可摘挂抱索器空乘人装置(RJKY37-18/300P型)设计方案****煤业有限责任公司2012年9月1、巷道的基本情况1.1 总长300m,最大坡度18°,上平巷15m。
安装宽度4.2m,高度3.4m。
1.2 变坡点共2个。
2 运行环境及使用条件2.1 乘人装置工作时周围空气中的甲烷、煤尘和硫化氢、二氧化碳等不得超过《煤矿安全规程》中所规定的安全含量。
2.2 环境温度不超过40℃,相对湿度不超过90%。
2.3 煤矿巷道工作坡度不超过18º。
2.4 无强烈振动和冲击以及巷道容易变形的地方。
2.5 无破坏绝缘的腐蚀气体和导电尘埃的环境中。
2.6 无滴水的地方。
4、主要设备选型4.1 防爆电动机型号:YB2-250M-6,功率37KW,电压660 V。
4.2 减速机型号:TB3HV10-63-C-HX,速比63,额定输出扭矩43KNm,额定功率54 KW。
4.3 高速端制动器型号:BYWZ4B-300/80,制动力矩750 Nm。
4.4 低速端轮边制动器型号YQP50B112,制动力50000 N。
4.5 钢丝绳型号为6×26WS+FC1670-φ20-ZZ,必须是绳芯少油表面无油,右同向捻。
安全技术指标一览表5、设计方案说明5.1 驱动部分5.1.1 驱动部传动方式采用机械传动方式。
驱动部分主要包括隔爆电动机、联轴器、高速端制动器、减速机、驱动主轴组件、驱动轮以及低速端轮边制动器等。
5.1.2 驱动部结构形式经计算单轮驱动时,钢丝绳与驱动轮之间的围包角180°,可以满足驱动力的要求,因此本方案采用单轮驱动方式。
该驱动结构紧凑,承载能力强,噪音小,传动效率较高,安装简单方便。
该驱动装置采用架空安装方式。
5.1.3 驱动轮(迂回轮)的选取《煤矿安全规程》第416条第三项:井下提升绞车和凿井提升绞车的滚筒、井下架空乘人装置的主导轮及尾导轮和围抱角大于90°的天轮,其直径不得小于钢丝绳直径的60倍,围抱角小于90°的天轮,其直径不得小于40倍;据规程主传动轮直径与钢丝绳直径60倍的关系,驱动轮直径应大于或等于1200mm,根据现场安装条件和使用要求,本方案选用驱动轮直径为1400mm,迂回轮直径为1400 mm。
架空乘人装置技术方案

架空乘人装置安装方案为了加强辅助运输管理,提高人员、物料、设备运输效率,保证辅助运输安全,避免运输事故的发生,拟在4煤1#辅助运输大巷、4煤西部1#辅助运输大巷安装架空乘人装置,具体方案如下:一、架空乘人装置安设位置通过对目前4煤、4上煤各主要巷道进行分析,暂定主要辅助运输大巷架空乘人装置安设位置为4煤1#辅助运输大巷,4煤西部1#辅助运输大巷。
1、4煤1#辅助运输大巷根据巷道目前的硐室布置暂定安装位置为4煤1#辅助运输大巷1#胶轮车库至4煤1#辅助运输大巷11#联巷,累计长度1950米。
2、4煤西部1#辅助运输大巷入口与4煤1#辅运巷11#联巷施工35米巷道贯通后,安装位置为4煤1#辅助运输大巷11#联巷至40204回联口,累计长度2200米。
二、安装架空乘人装置方案(一)、4煤1#辅助运输大巷架空乘人装置该段巷道内无备采工作面可不考虑支架运输1、横梁安装方式坡段、变坡点采用架空贯通横梁固定方式,对架空乘人装置进行固定。
施工时在巷道弓形处同一高度水平挖设固定梁窝,将贯通梁固定到位如施工安装断面图(1)。
平巷段采用托板托架固定横梁方式进行固定。
(采用两根锚杆将加工好的托板托架固定在巷帮架设横梁固定)如施工安装断面图(2)。
2、抱索器固定方式由于该装置安设在4煤1#辅运巷,巷道两侧布置有4煤1#采区变电所,401采区水泵房、4煤1部胶带中驱硐室、4煤2部皮带机头等主要机房硐室。
为保证设备出现故障后能安全顺利将设备运送到位,采用活动式抱索器。
3、安装固定位置该架空乘人装置靠入井方向巷道左侧安装(1)根据煤矿安全规程第三百八十三条:采用架空乘人装置运送人员时,应遵守下列规定:吊椅中心至巷道一侧突出部分的距离不得小于0.7米,双向同时运送人员时钢丝绳间距不得小于0.8米,固定抱索器的钢丝绳间距不得小于1.0米的要求。
架空乘人装置钢丝绳拖轮底座安装距巷帮不低于0.8米。
(2)由于架空乘人装置运行后,沿途机房硐室存在设备更换问题,所以必须保证车辆顺利通行,目前我矿在用工程车高度2.1米,为方便运输结合《煤矿安全规程》第三百八十三条:乘人吊椅距底板的高度不得小于0.2米,在上下人站处不大于0.5米的要求,架空乘人装置有效安装高度应为2.3米。
架空乘人装置技术参数及要求

架空乘人装置技术参数及要求编号:1架空乘人装置技术参数及要求一、型号规格与购置数量1.型号规格:活动抱索器液压驱动式架空乘人装置2.购置数量:1200米一套,3000米一套,共两套二、技术参数1.1200米架空乘人装置1.1巷道参数:上平巷长30米,下平巷长30米,斜巷长1100米,巷道总长1200米;最大倾角9.5°,平均倾角8.2°,变坡点4个;巷道设计宽度4米,设计高度3.5米;巷道转弯:57°、54°右转弯各一个。
1.2架空乘人装置主要参数:1.3主要设备选型:液压站型号:YZ110 -FGD,最大输出流量310.8L/min;防爆电动机型号:YB3-315S -4 ,功率90KW,电压1140/660V,转速1480转/分;主油泵型号:HPV180,排量180mL/r,最大流量310.8L/min,额定工作压力25MPa;液压马达型号:A2FM135,排量:135mL/r,额定工作压力 25MPa;减速机型号:M317R3SZ63B-HX ,速比63;低速端轮边制动器型号:YQP120-C208A ,制动力50000N;钢丝绳型号为24NAT6×31WS+FC 1670,必须是绳芯少油表面无油,右同向捻。
2.3000米架空乘人装置2.1巷道参数:下平巷长30米,上平巷长30米,斜巷长2800米,巷道总长3000米;最大倾角-9°,平均倾角-4°,变坡点5个;巷道设计宽度4米,设计高度3.5米;巷道转弯:64°左转弯一个。
2.2架空乘人装置主要参数:2.3主要设备选型:液压站型号:YZ110 -FGD,最大输出流量310.8L/min;防爆电动机型号:YB3-315S -4 ,功率90KW,电压1140/660V,转速1480转/分;主油泵型号:HPV180,排量180 mL/r,最大流量310.8L/min,额定工作压力25MPa;液压马达型号:A2FM135,排量:135mL/r,额定工作压力25MPa;减速机型号:M317R3SZ63B-HX ,速比63;低速端轮边制动器型号:YQP120-C208A ,制动力50000N;钢丝绳型号为24NAT6×31WS+FC 1670,必须是绳芯少油表面无油,右同向捻。
架空乘人装置计算说明书

达竹柏林矿暗副斜井架空乘人装置计算书一、计算说明已知参数:斜长:L=300坡度:α=21.00主要参数的确定:1、预选电动机:YB-225M-630Ne=9802、预选驱动轮:直径=13、预选减速机:TB3HV07-56i=56钢丝绳运行速度:V=K×(πD/60)×Ne/i=0.90 m/sK--钢丝绳运行时蠕动系数.取K=0.984、预选钢丝绳: 6×19S-¢22 (q0= 1.785、设吊椅间距为:λ1=10则运输效率: Qr=3600×V/λ1=323 人次/h6、托轮间距: λ2=87、驱动轮绳槽与牵引钢丝绳间的摩擦系数 μ=0.28、牵引绳在驱动轮上的围包角а=180°二、牵引钢丝绳张力的计算:架空乘人装置力学模型图最小点张力的计算Smin=C×q0×g式中:Smin--最小张力点的张力,N;C---钢绳的挠度系数, 取C=1000q0---预选牵引钢绳的每米质量 1.78Kg/mg---重力加速度 g=9.81m/sSmin=C×q0×g =17461.8°mm mkW Kg/m)m 转/分各点张力的计算1、当下放侧无人乘坐而上升侧满员时:(动力运行状态)线路运行阻力:W4-1 =[q0+(Q1+Q2)/λ1]×(ωCOS α+SIN α)Lg=11961.78W2-3 =[q0+Q2/λ1]×(ωCOS α-SIN α)Lg=-3279.10各点张力:S3=Smin=17461.8S4=1.01Smin=17636.4S1=S4+W4-1=29598.20S2=S3-W2-3=20740.90式中:q0--每米钢丝绳质量 1.78Kg/mQ1--每人人体重量 取Q1=75KgQ2--每把吊椅重量 取Q2=15Kgω--牵引钢丝绳运行阻力系数,动力运行时. 取ω=0.02制动运行时. 取ω=0.015L――井筒斜长2、当下放侧满员而上升侧无人时时:(制动运行状态)线路运行阻力:W4-1 =[q0+(Q2/λ1]×(ωCOS α+SIN α)Lg=3594.52W2-3 =[q0+(Q1+Q2)/λ1]×(ωCOS α-SIN α)Lg=-10925.14各点张力:S3=Smin=17461.8S4=1.01Smin=17636.4S1=S4+W4-1=21230.94S2=S3-W2-3=28386.94三、驱动轮防滑校验当下放侧无人乘座而上升侧满员乘座时,处于动力运行状态且S1-S2>0 S1/S2= 1.43 <е[1.87]当下放侧满员而上升侧无人时时:(制动运行状态)且S2-S1>0 S2/S1= 1.34 <е[1.87]式中μ--钢丝绳与驱动轮衬垫摩擦系数. 取μ=0.2α--钢丝绳在驱动轮上的围包角。
架空乘人装置设计计算说明书

α)Lg
-5524
N
S3=Smin=
11525
N
S4=1.01S3=
11640
N
S1=S4+W4-1=
13746
N
S2=S3-W2-3=
17049
N
四 驱动轮防滑校验
当下放侧无人乘座而上升侧满员乘座时,处于动力运行状态:
且S1-S2>0,S1/S2=
且S1-S2<0,S2/S1= 式中:钢丝绳与驱动轮衬垫摩擦系数
Lg
6938
N
W2-3=[q+W2/L1]×(ωcosα-sinα)Lg
-1677
N
各点张力:
S3=Smin=
11525
N
S4=1.01S3=
11640
N
①
S1=S4+W4-1=
18578
N
S2=S3-W2-3= 驱动力=S1-S2=
13202
N
5376
N
q——每米钢丝绳质量
式中:
Q1——每人人体重量加带物重,取Q2=85kg
N.m
上式中:T—计算扭矩,N.m; Pw—驱动功率,kw;n—转速,转/分
选定制动器为:BYWZ3-300/45,制动力为650N.m,符合要求
安全闸的选型:安全闸的最大制动力矩不小于额定负荷力矩的2倍。预选安全闸型 号为YLBZ-25
其最大制动力为: 其制动力矩为: 2
50000
N
M2=2*N*f*Rm
N.M
26000
N.M
式中:N—制动力,N; f—闸瓦制动盘的摩擦系数,取f=0.4; Rm—制动盘的平均摩 擦半径(m)
2倍额定负荷力矩为:2T=
架空乘人装置

RJHY型煤矿活动抱索器架空乘人装置点击数:113产品分类:MA认证设备>>提升、运输设备>>辅助运输设备简介煤矿活动抱索器架空乘人装置(俗称“猴车”)是煤矿井下人员运输的首选设备,RJHY型煤矿活动抱索器架空乘人装置可以实现长期的连续运输,速度快,安全可靠,使用维护简单。
系统主要由驱动站、上车站、下车站、中间车站、转向站、张紧塔、导向轮组、活动乘人器及安全保护系统等组成。
猴椅为可摘挂式结构,最大速度达 3.0 m/s,乘坐人员静态上下、可实现水平曲线和垂直曲线的长距离运输。
驱动站提供整个系统的动力、机械传动、落地安装。
上、下车站及中间车站是人员上、下的场所,保证人员在静止状态上车或下车。
上车站设有启动限制连续上车,下车站设有止回装置避免乘人器倒行。
中间站是在中间某个点需要停车而设置的安全上、下车站。
转向站为系统提供反力。
张紧塔为系统提供初张力,保证系统正常运行的张紧力。
张紧力过大、过小时都能自动停机保护。
导向轮组为系统实现变坡和转弯提供帮助,实现钢丝绳强制导向并能避免脱绳事故的发生。
乘人器为活动式,由吊挂椅架、吊杆、脚蹬和弹性座椅等组成。
吊挂椅架上带有滚轮,使乘人器可在上、下车轨道上自由滑行;吊挂椅架座椅用销轴连接,可任意转动调整乘人器与牵引钢丝绳之间的夹角。
安全保护系统实现运输系统的监控和保护,包括PLC控制、全线拉线急停、预启动报警、通话联络、张紧监控、限乘启动器、速度检测等。
特点产品特点•运行速度快,人员运送量大,运输效率高;•人员在固定车站乘车,静态上下,运行安全可靠;•上车站设有启动器限制连续上车,下车站设有止回装置避免乘人器倒行;•可实现水平拐弯运送,适应性更强;•采用先进的PLC控制和保护系统,乘坐更安全;•采用软质减振座椅,结构合理,乘坐舒适、平稳;•驱动轮设有末端钳形闸,制动装置为失效安全型,制动安全可靠;•驱动部可采用变频或开关磁阻电机等控制形式,实现无级调速。
五部架空乘人装置技术要求
第五部架空乘人装臵技术要求一、设备名称:架空乘人装臵二、设备型号:RJY110-25/1800型数量:1台三、使用环境及资质要求1、能在煤矿井下,有煤尘和瓦斯等有害气体、具有爆炸危险的环境下正常工作。
2、要求有《MA》标志,三证齐全,符合《煤矿安全规程》的有关要求。
3、工作环境温度为:-100C~400C,噪音:〈85db〉。
4、产品质量符合国家行业规定中的有关要求。
四、技术要求:(一)主要设备的技术参数(1)、设备安装长度:1200m(2)、设备安装倾角:16°-22°(3)、最大运行速度:1.2米/秒(4)、运输能力:单向517人/h(5)、驱动轮直径:2000mm(6)、回绳轮直径:2000mm(7)、乘人间距:6.0m(8)、绳间距:2000mm(9)、托绳轮间距:平巷6m、斜巷中5.7m(10)、压绳轮间距:平巷16m、斜巷中11.4m(11)、防爆电机:110kw、660v(12)、钢丝绳:6×19S+NF-32-1670-特-ZS(无油)(13)、回绳站滑道长度:14m(14)、张紧力:8040kg(15)、采取固定抱索器(16)、该部架空乘人装臵(猴车)要求厂家配套420套吊椅。
(17)、巷道转弯:具有星轮转弯装臵,平巷段转弯角度83度,厂家合理布臵星轮转弯装臵数量。
(18)、防爆型三相异步电动机额定功率:110kw 额定电压:660/1140V(19)、电控系统为防爆变频控制系统。
我矿现为一至四部猴车电控系统为唐山开城电控系统,为和一至四部猴车电控系统统一,提高设备的互换性,方便维护,建议电控系统采用唐山开诚电气公司的变频及控制系统。
(20)、由于巷道长度超过1000米,厂家考虑信号衰减。
(21)、具体设计结构和配臵,结合矿井实际情况,厂家拿出设计方案。
(二)、架空乘人装臵设备制造要求1、驱动装臵采用架空安装,机尾迂回轮及张紧装臵均采用架空安装;2、驱动形式为单轮驱动;3、直线段托绳轮每6米为一组,其直径为200mm;变坡点采用双托轮,其直径为200mm,托绳轮吊架为单边可调型;4、乘人器由 G型抱索器和H型吊椅组成,抱索器形式为固定式抱索器;5、张紧形式为尾部重锤张紧, 配备电动张紧装臵,电压660v/127v。
架空乘人装置
RJHY型煤矿活动抱索器架空乘人装置点击数:113产品分类:MA认证设备>>提升、运输设备>>辅助运输设备简介煤矿活动抱索器架空乘人装置(俗称“猴车”)是煤矿井下人员运输的首选设备, RJHY型煤矿活动抱索器架空乘人装置可以实现长期的连续运输,速度快,安全可靠,使用维护简单。
系统主要由驱动站、上车站、下车站、中间车站、转向站、紧塔、导向轮组、活动乘人器及安全保护系统等组成。
猴椅为可摘挂式结构,最大速度达 3.0 m/s,乘坐人员静态上下、可实现水平曲线和垂直曲线的长距离运输。
驱动站提供整个系统的动力、机械传动、落地安装。
上、下车站及中间车站是人员上、下的场所,保证人员在静止状态上车或下车。
上车站设有启动限制连续上车,下车站设有止回装置避免乘人器倒行。
中间站是在中间某个点需要停车而设置的安全上、下车站。
转向站为系统提供反力。
紧塔为系统提供初力,保证系统正常运行的紧力。
紧力过大、过小时都能自动停机保护。
导向轮组为系统实现变坡和转弯提供帮助,实现钢丝绳强制导向并能避免脱绳事故的发生。
乘人器为活动式,由吊挂椅架、吊杆、脚蹬和弹性座椅等组成。
吊挂椅架上带有滚轮,使乘人器可在上、下车轨道上自由滑行;吊挂椅架座椅用销轴连接,可任意转动调整乘人器与牵引钢丝绳之间的夹角。
安全保护系统实现运输系统的监控和保护,包括PLC控制、全线拉线急停、预启动报警、通话联络、紧监控、限乘启动器、速度检测等。
特点产品特点•运行速度快,人员运送量大,运输效率高;•人员在固定车站乘车,静态上下,运行安全可靠;•上车站设有启动器限制连续上车,下车站设有止回装置避免乘人器倒行;•可实现水平拐弯运送,适应性更强;•采用先进的PLC控制和保护系统,乘坐更安全;•采用软质减振座椅,结构合理,乘坐舒适、平稳;•驱动轮设有末端钳形闸,制动装置为失效安全型,制动安全可靠;•驱动部可采用变频或开关磁阻电机等控制形式,实现无级调速。
液压架空乘人装置技术规格书
架空乘人装置技术规格书设备的运行环境及使用条件1、乘人装置工作时周围空气中的甲烷、煤尘和硫化氢、二氧化碳等不得超过《煤矿安全规程》中所规定的安全含量;2、环境温度不超过40C,相对湿度不超过90%;3、煤矿巷道工作坡度不超过16。
;4、无强烈振动和冲击以及巷道容易变形的地方;5、无破坏绝缘的腐蚀气体和导电尘埃的环境中;6、无滴水的地方;二、设计规范1、《煤矿安全规程》2、中华人民共和国煤炭行业标准(AQ1038-2007)三、巷道基本情况3.1总长m,最大坡度°;其中斜长m,最大坡度°,上平巷m,下平巷m,有效安装宽度m,高度m03.2变坡点约个3.3巷道个转弯(请确认转弯角度和半径)四、设备型号:RJ五、设备主要参数、要求1、运行速度:0〜/S,无级可调,液压调速2、最大运输能力:人/小时3、最多同时乘座人数:人4、乘人间距:米5、托绳轮间距:米6、驱动轮直径:米7、迂回轮直径:米8、钢丝绳间距:米9、钢丝绳距地面高度:米10、托轮横梁底面安装高度(垂直巷道腰线方向)米 11、吊椅长度:米 12、钢丝绳型号:NAT6X S+FC1670ZZ (表面无油绳芯少油、右同向捻) 13、系统工作电压: V/660V14、液压站型号YZII-FD,为一用一备防爆电动机型号: ,功率 液压油泵为德国原装进口,型号:HPV15、减速机型号: ,速比4517、低速端轮边制动器型号:六、架空乘人装置的控制要求1、电气控制部分的设计1.1 可达到的控制要求:1.1.1 运行信息显示:日期、时间、速度、驱动压力、泵控压力、补泵压力、制动压力、油箱温度、辅泵压力、紧急停车区域、安全保护项目等;1.1.2机头机尾之间相互打点;1.1.3机头机尾之间相互通话;1.1.4运行控制智能化:系统的运行控制由PLC 可编程控制器实现自动检测和自动控制;1.1. 5安全保护控制智能化:系统的安全保护控制由PLC 可编程控制器实现自动检测和自动控制;1.1.6 提供远程控制安装接口;1.1.7 异地呼叫:当猴车巷道内安装有程控电话时,利用程控电话与猴车电控系统并网,实现机头异地呼叫功能,当全巷道安装有背景音乐系统时,可实现全巷道异KW,电压V/660V,排量ml/r16、液压马达为德国原装进口,型号HMF,排量ml/r 16、高速端制动器型号:,制动力矩Nm地呼叫功能。
架空乘人装置变频器技术规格书

架空乘人装置隔爆变频器技术规格书1、总则1.1 本规格书仅适用于****井下架空乘人装置变频器节能改造,它提出了防爆变频器及附属设备的功能设计、结构、性能、安装和试验等方面的技术要求及供货范围。
1.2 本规格书提出的是最低限度的技术要求,并未对一切技术细节作出规定,也未充分引述有关标准和规范的条文,投标方应提供符合有关工业标准、国家标准和本规格书的优质产品及其相应服务,同时符合国家有关设备制造等强制性标准。
1.3 如果投标方没有以书面形式对本规格书的条文提出异议,则意味着投标方提供的设备完全符合本规格书的要求。
1.4 本规格书所使用的标准如遇与投标方所执行的标准不一致时,按较高标准执行。
1.5 所有文件、图纸采用中文,相互间的通讯、谈判、合同及签约后的联络和服务等均应使用中文。
1.6 投标书及合同规定的文件,包括图纸、计算、说明、使用手册等,均应使用国际单位制(SI)。
1.7 本技术规格书未尽事宜,由投标方、招标方双方协商确定。
2、工程条件2.1 工程概况本工程为井下架空乘人装置变频器节能改造。
2.2架空乘人装置技术参数架空乘人装置型号:电机:额定功率:额定电压:额定电流:功率因数:冷却方式:运行速速:控制方式:3、技术要求3.1应遵循的主要标准下列标准所包含的条文,通过在本规格书中引用而构成本规格书的基本条文。
在规范书出版时,所示版本均为有效。
所有标准都会被修订,使用本规格书的各方应探讨使用下列标准最新版本的可能性。
1.《煤矿安全规程》(2011版)2.《矿山电力设计规范》GB50070-20093.《低压配电设计规范》GB50054-954.《工业过程测量和控制装置的电磁兼容性》GB/T13926-925.《交流高压断路器》GB1984-20036.《交流高压电气动热稳定试验方法》GB27067.《交流高压隔离开关及接地开关》GB1985-988.《高压开关设备通用技术条件》GB11022 -889.《高压输变电设备的绝缘配合及高电压试验技术》GB311.1-199710.《旋转电机定额和性能》ZBC55-200011.《电气装置安装工程电气设备交接试验标准》GB50150-200612.《煤矿安装工程质量检验评定标准》MT5010-9513.《标准电压》GB 156-199314.《包装储运图示标志(EQV ISO780:1997)》GB 191-200015.《电工电子产品基本环境试验规程试验A:低温试验方法》GB/T2423.1—200116.《电工电子产品基本环境试验规程试验B:高温试验方法》GB/T2423.2—200117.《电工电子产品基本环境试验规程试验C:恒定湿热试验方法》GB/T2423.3—199318.《电工电子产品基本环境试验规程试验Ea:冲击试验方法》GB/T2423.5—199519.《电工电子产品基本环境试验规程试验Fc:振动(正弦)试验》GB/T2423.10—199520.《电工成套装置中的导线颜色》GB/T2681-198121.《电工成套装置中的指示灯和按钮的颜色》GB/T2682-198122.《电气设备安全设计标准》GB/T4064—198323.《外壳防护等级(IP代码)(EQV IEC60529:1989)》GB/T4208-199324.《电工电子产品应用环境条件贮存(IEC 60721-3-1:1997) 》GB 4798.1-198625.《电工电子产品应用环境条件运输(IEC 60721-3-2:1997) 》GB 4798.2-199626.《工业产品使用说明书总则》GB/T9969.1-199827.《调速电气传动系统第3部分:产品的电磁兼容性标准及其特定的试验方法》GB 12668.3-200428.《工业产品保证文件总则》GB/T14436-199329.《电能质量公用电网谐波》GB/T14549-199330.《电力系统谐波控制推荐标准》IEEE std 519-19923.2对隔爆变频器的技术要求3.2.1选用矿用隔爆变频器,产品具有防爆合格证和煤安标志,变频系统与原有控制系统衔接,实现上下人员检测自动开停、根据负载决定变频赫兹等功能。
架空乘人装置说明书

驱动装置功率 22kW 37kw 55kw 75kw 110kw 30kw 37kW 45kW 55kW
最大运行速度 0.99m/s 1.1m/s 1.1m/s 1.1m/s 1.1m/s 1.12m/s 1.06m/s 1.06m/s 1.13m/s
同时乘座人数 34 人 66 人 68 人 91 人 190 人 51 人 87 人 133 人 169 人
产品按抱索器型式分:煤矿固定抱索器架空乘人装置、煤矿活动抱索器架空乘人装置、 煤矿大坡度可摘挂抱索器架空乘人装置、煤矿单向活动抱索器架空乘人装置、煤矿单向大坡度 可摘挂抱索器架空乘人装置、煤矿单向固定抱索器架空乘人装置。
本说明书主要描述 RJY 系列煤矿固定抱索器架空乘人装置。
1.2 产品的规格型号如下:
298KN 417KN
26mm 20mm 22mm 22mm 28832N 12113N 14756N 19409N 69379N 31230N 37654N 42968N
6 417KN 246kN 298kN 298kN
24mm 22634N 54019N
355kN
尾绳最大张紧力 14565N 14565N 17636N 24671N 24671N 14565N 17636N 17636N 21005N
尾绳最小张紧力 14421N
尾绳带负载张
紧力
14565N
14421N 14565N
17461N 17636N
24426N 24671N
24426N 24671N
14421N 14565N
17462N 17636N
17462N 17636N
20797N 21005N
围包角
180°
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
XXX煤矿架空乘人装置技术规格书
责任单位:XXX
主管单位:XXX
2017年8月
架空乘人装置技术规格书
一、概述
架空乘人装置适用于XX煤矿XX人员运输,架空人车各部尺寸应满足下井、运输、安装、使用要求。
巷道总安装长度1500米,宽度为4m,高度为3.2m,巷道最大坡度为12°,平均坡度为6°,巷道为架空人车专用巷道。
★二、使用条件和基础数据
架空乘人装置满足于井下高瓦斯环境使用要求,
环境温度0-40℃,相对湿度未超过90%;
巷道最大坡度15º;
★三、技术要求
1、设备参数:
(1)、运行速度:0-1.7m/s,变频调速。
(2)、运输能力:单向不小于550人/h。
(3)、乘人间距:大于15m。
(4)、托绳轮间距:8m。
(5)、主驱动轮直径:1.6m。
(6)、回绳轮直径:1.6m。
(7)、钢丝绳距地板高度:2.1m。
(8)、托轮横梁底面安装高度(垂直巷道腰线方向)2.35m。
(9)、吊椅长度:1700mm。
(10)、钢丝绳型号:20NAT6×19S+NF1670ZS 无油芯预张拉。
(11)、电动机额定功率:110kW,660/1140V 防爆变频电机。
(12)、减速机:螺旋锥齿轮-斜齿轮减速器。
(13)、绳间距:1200mm。
(14)、安全制动器安装驱动轮上,由液压泵站控制,液压打开、碟簧制动。
(15)、工作制动器安装在高速端联轴器上,选用电液制动器。
(16)、驱动装置结构形式:落地双轮结构。
(17)驱动轴直径不小于180mm,材料性能不低于40Cr。
(18)、变频器选用四象限变频器,功率132kW,系统供电电压为660V,容量:
≧150KVA。
2、设备要求:设备有煤安证书,整套设备电控系统煤安证,生产许可证,煤安标志。
2.1 驱动轮、回绳轮的选取
井下架空乘人装置的驱动轮、回绳轮直径不得小于钢丝绳直径的60倍,驱动轮直径不得小于最粗钢丝直径的900倍;驱动轮轮衬应选用摩擦系数大、抗静电、阻燃、耐磨性好,耐油、耐水的K25材料的轮衬,该轮衬与钢丝绳的摩擦系数应达到0.25以上。
2.2 钢丝绳的要求
按《煤矿安全规程》第四百零八条的规定,架空乘人装置的钢丝绳安全系数最低值为6。
2.3 托、压绳轮的要求
配套的托绳轮应有三种结构形式:分体双轮托绳轮、分体单轮压绳轮。
托、压绳轮采用联接器和圆吊筒的连接方式(吊筒规格φ114×4),万向可调,以便更好地适应巷道情况,托轮间距为8m。
在主要变坡点处使用双轮托绳轮组或组合压绳轮组,吊椅平滑过渡,各轮受力均匀;双轮托绳轮支撑轴为整体加工;托绳轮与压绳轮配合使用,压绳轮间距为48m;吊椅通过托压绳轮时不能出现卡阻。
为保证本装置的使用寿命,要求所有托绳轮轮体为整体铸钢件加工而成,每一个托、压绳轮的轮体均为双轴承结构(轴承内径不小于30mm),保证轮体运行平稳、低噪声;轮衬采用螺栓限位固定,更换轮衬只需拆卸螺栓即可,简单方便。
托、压轮的轮衬应具有耐磨性能好、使用寿命长、摩擦系数适当的特点,能有效降低钢丝绳的磨损,提高钢丝绳的寿命。
所有托绳轮直径均不得低于280mm,宽50mm;压绳轮直径均不得低于200mm,宽70mm。
轴承润滑油杯设置在轴端,实现不停机加注润滑油。
2.4 乘人器的要求
乘人器由架空乘人装置专用高速活动抱索器和吊椅组成,吊椅总高1700mm。
吊椅杆表面防锈处理,吊椅座按人的正常座姿进行优化设计,座板采用硫化橡胶工艺,要求乘坐舒适;抱索器的外形设计满足绳轮衬垫要求,使之与轮衬吻合较为充分,并在过轮时无太大振动。
抱索器挂板采用焊接结构,且含有四盘免维护轴承,以实现乘员的静止上下和吊椅的自动存储;抱索器的抗滑力不应小于重车
在最大坡度时下滑力的2倍,抱索器应有足够的强度,安全系数不小于5,抱索器能够与静止上下站配合实现乘员静止上下。
2.5静止上下站、吊椅存储装置
要求设备配有静止上下站及吊椅存储装置,表面防锈处理,机头、机尾吊椅存储要求各能够存下200把吊椅。
静止上下站的上人侧设有限位装置和限位控制装置,实现乘员静止上车和乘人间距的自动控制;静止上下站的下人侧设有逆止装置,防止吊椅在滑道上下滑,实现乘员静止下车。
上下站和吊椅存储装置应包含固定钢丝绳走向的绳轮和固定吊筒,并且要使用双轮绳轮来分担受力,固定吊筒、绳轮与系统的中间轮系通用。
2.6 机尾部分的要求
机尾部分主要应包括回绳装置、张紧小车、滑道、导绳轮和张紧装置;回绳装置轮槽内镶嵌有橡胶轮衬;回绳装置在滑道内可自由移动,保持系统恒定的张紧力;张紧方式为重锤张紧,并配备手动储绳装置,通过导绳轮将重锤置于巷帮硐室中;滑道长度(即拉紧行程)不低于15m。
3 电气控制部分的要求
3.1 控制要求:
3.1.1 主控台和后台主机电脑运行信息显示:日期、时间、钢丝绳运行速度、短路、接地、欠压、超压、过载、过热、过流、电机缺相等保护和漏电闭锁电控系统故障等安全保护项目显示。
采用四象限变频控制系统,运行速度三档调速,能实现软起动、软停车,避免直接起动造成的冲击和其它不安全隐患。
3.1.2 沿途每100m安装一台音箱用来播放音乐,同时实现开机预警、打点通过功能。
3.1.3 运行控制智能化:系统的运行控制由PLC可编程控制器实现自动检测和自动控制。
3.1.4 提供远程控制通讯接口(以太网)。
3.1.5 配套视频监控系统,防爆摄像头2个。
3.2 保护功能:
3.2.1 钢丝绳欠速打滑、过速飞车的速度保护
当速度超过设计速度的20%时,架空乘人装置自动切断电源,同时工作制动器和安全制动器立即制动。
3.2.2 乘人间距控制功能
上下站设置气动限位装置和电控限位控制装置,实现乘员间距的自动控制。
3.2.3 张紧力下降保护、重锤落地保护装置
当张紧装置不能使牵引钢丝绳保持恒张力,系统无法安全运行时,系统应报警并自动停止运行。
当重锤高度小于设定值时,系统报警并自动停止运行。
3.2.4 钢丝绳断绳抓捕
当牵引钢丝绳断绳时,系统会停止运行同时断绳抓捕装置夹紧钢丝绳。
3.2.5 全巷道突发事件紧急停车保护
乘坐人员在乘坐途中,若发现紧急情况需要停车,则在乘车区域内的任一点,拉动急停开关拉线均可使系统停止运行,拉线开关每48m安设一台。
每个开关动作后自动机械闭锁,同时必须有灯光信号,开关通过编号在机头电控显示位置。
只有维护人员手工复位拉线急停开关后,方可通知司机继续开机。
3.2.6 变坡点掉绳、捕绳保护
当变坡点牵引钢丝绳脱离托轮往外掉下时,钢丝绳碰到掉绳保护,同时系统自动停止运行。
捕绳装置可在钢丝绳脱落时及时捕捉钢丝绳,避免因钢丝绳继续掉落造成的人员伤害事故。
3.2.7 制动器动作失效保护
工作制动器、安全制动器均为失效安全型,每套制动器制动力(矩)应满足不小于1.5~2倍牵引力的要求。
起动前,制动器未完全打开时,系统应无法起动;若乘人装置在运行过程中,制动器突然制动,系统应立即停止运行。
3.2.8 系统防静电保护
系统运行中的钢丝绳在具有“双抗”(抗静电、阻燃)性能的托轮轮衬和头尾轮轮衬上运行,将钢丝绳和轮衬因运动摩擦而产生静电导入大地。
3.2.9 减速机油温、油位、电机温度保护
电机、减速机配置实时温度显示功能(电机不低于5个、减速机不低于3个)超温时能自动停车,减速机有油位显示功能,减速机润滑油油位低于设定位置时
系统报警,减速箱内油温温升不应超过35℃,各主要部件壳体最高温度应不超过75℃。
3.2.10语音声光提示系统
当乘坐人员将要到达下车点时,语音提示系统会发出“前方到站,准备下车”的语音和闪烁提示信号,提醒乘坐人员准备下车。
3.2.11有断轴保护措施
在发生断轴事故时,可以有效防止驱动轮及钢丝绳脱落飞出造成的安全事故。
3.2.12 必须有沿途延时开机声光预警信号。
四、供货范围
五、技术资料及服务
需厂家提供:
1、架空乘人装置的设备安装图(包括驱动装置基础图、横梁布置图、电气系统布置图)、架空乘人装置的电气原理图、控制系统原理图、控制系统接线图、设备外型尺寸和结构图、安装、操作、维修说明等技术资料。
2、免费技术培训,直到能正确操作、维护和使用。
3、投入使用后,质保期内提供免费技术服务。
4、全套的设备性能测试试验报告。
5、有关图表。
6、各设备和部件的检测、试验报告。
7、全部图纸、材料清册、所有设备、元件、部件型号、规格、特性参数表、产品检验合格证、MA标志证书及出厂日期。
以上文件和资料均须提供2套、工具1套
8、质量保证期为设备安装调试完毕验收合格正常运行之日起12个月
9、供货周期及供货范围
供货周期:合同生效后3个月内。