电机控制基于Simulink的仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
毕业设计基于MATLABSIMULINK的交流电动机调速系统仿真

1 绪论1.1课题研究背景及目的研究背景直流调速系统的主要优点在于调速范围广、静差率小、稳定性好以及具有良好的动态性能;在相当长时期内,高性能的调速系统几乎都是直流调速系统;尽管如此,直流调速系统却解决不了直流电动机本身的换向和在恶劣环境下的不适应问题,同时制造大容量、高转速及高电压直流电动机也十分困难,这就限制了直流拖动系统的进一步发展;交流电动机自1985年出现后,由于没有理想的调速方案,因而长期用于恒速拖动领域;20世纪70年代后,国际上解决了交流电动机调速方案中的关键问题,使得交流调速系统得到了迅速的发展,现在交流调速系统已逐步取代大部分直流调速系统;目前,交流调速已具备了宽调速范围、高稳态精度、快动态响应、高工作效率以及可以四象限运行等优异特性,其稳、动态特性均可以与直流调速系统相媲美;与直流调速系统相比,交流调速系统具有以下特点:(1)容量大;(2)转速高且耐高压;(3)交流电动机的体积、重量、价格比同等容量的直流电动机小,且结构简单、经济可靠、惯性小;(4)交流电动机环境使用性强,坚固耐用,可以在十分恶劣的环境下使用;(5)高性能、高精度的新型交流拖动系统已达同直流拖动系统一样的性能指标;(6)交流调速系统能显著的节能;从各方面看,交流调速系统最终将取代直流调速系统;1.1.1研究目的本课题主要运用MATLAB-SIMULINK软件中的交流电机库对交流电动机调速系统进行仿真,由仿真结果图直接认识交流系统的机械特性;本文重点对三相交流调压调速系统进行仿真研究,认识PID调节器参数的改变对系统性能的影响,认识该系统动态及静态性能的优劣及适用环境;在实际应用中,电动机作为把电能转换为机械能的主要设备,一是要具有较高的机电能量转换效率;二是应能根据生产机械的工艺要求控制和调节电动机的旋转速度;电动机的调速性能如何对提高产品质量、提高劳动生产率和节省电能有着直接的决定性影响;因此,调速技术一直是研究的热点12;而交流调速系统凭着其绝对的优势,最终必将取代直流调速系统3;近几年来,科学技术的迅速发展为交流调速技术的发展创造了极为有利的技术条件和物质基础;交流电动机的调速系统不但性能同直流电动机的性能一样,而且成本和维护费用比直流电动机系统更低,可靠性更高4;目前,国外先进的工业国家生产直流传动的装置基本呈下降趋势,交流变频调速装置的生产大幅度上升;在日本,1975年在调速领域,直流占80%,交流占20%;1985年交流占80%,直流占20%5;到目前为止,日本除了个别的地方还继续采用直流电机外,几乎所有的调速系统都采用变频装置67;计算机仿真技术在交流调速系统的应用,使得对交流调速的性能分析和研究变的更为方便;传统的计算机仿真软件包用微分方程和差分方程建模,其直观性、灵活性差,编程量大,操作不便;随着一些大型的高性能的计算机仿真软件的出现,实现交流调速系统的实时仿真可以较容易地实现8;如:matlab软件已经能够在计算机中全过程地仿真交流调速系统的整个过程;matlab语言非常适合于交流调速领域内的仿真及研究,能够为某些问题的解决带来极大的方便并能显著提高工作效率;随着新型计算机仿真软件的出现,交流调速技术必将在成本控制、工作效率、实时监控等方面得到长足进步910;交流调速技术发展到今天,相对而言已经比较成熟,在工业中得到了广泛的应用,但是随着一些新的电力电子器件和一些新的控制策略的出现,工业应用对交流调速系统又提了新的要求,现代交流电机调速技术的研究和应用前景十分广阔;20世纪80年代中期研制开发出一种新型交流调速系统——开关磁阻电动机调速系统,它将新型的电机、现代电力电子技术与控制技术融为一体,形成一个典型的机电一体化的调速系统;由于它在效率、调速性能和成本方面都具有一定的优势,已成为当代电力拖动的一个热门课题,将会在调速领域占有一席之地;交流调速的控制策略近年来发展非常迅速,诸如转差矢量控制,自适应控制磁通自适应、断续电流自适应、参数自适应等模型参考自适应控制,状态观测器磁通观测器、力矩观测器等,为补偿速度降以提高精度的前馈控制,以节能、平稳、快速等为目标函数的优化控制,线性二次型积分控制,滑模变结构控制,直接转矩控制及模糊控制等已见诸国内外有关文献及杂志中论文主要工作1.分析各种调速系统在实际运用中的优缺点,分析各种调速方式适用的场合;2.重点分析掌握三相交流调压调速原理,机械特性等,然后对其进行MATLAB的仿真实现,通过修改系统各部分的参数,可以输出稳定的波形;根据示波器输出结果,对系统的性能进行分析;论文章节安排第一章绪论:主要介绍本课题的研究背景和研究内容,以及交流调速系统在国内外的发展和前景展望;介绍了文章的主要工作安排以及论文章节安排;第二章交流调速系统:比较交流调速系统的各种调速方案,重点分析了交流调压调速系统的原理及机械特性,及对交流调压调速电路以及闭环调压调速系统进行了重点的研究分析;第三章交流调压调速系统的MATLAB仿真:运用MATLAB的SIMULINK工具箱分别对异步电动机调压调速系统的主电路与控制电路进行建模和参数设置,最终建立了异步电动机调压调速系统电路的仿真模型,并对其进行了仿真分析和研究,给出仿真结果,通过对仿真结果的分析验证了交流调压电路的工作原理和所建模型的正确性;第四章结论:对全文进行总结,指明异步电动机调压调速系统的发展方向;2 交流调速系统原理与特性交流调速系统交流电机包括异步电动机和同步电动机两大类;对交流异步电动机而言,其转速为:()min /)1(60r ps f n -= 2-1 从转速公式可知改变电动机的极对数p ,改变定子供电功率f 以及改变转率s 都可达到调速的目的;对同步电动机而言,同步电动机转速为:()min /601r pf n = 2-2 由于实际使用中同步电动机的极对数p 是固定的,因此只有采用变压变频VVVF 调速,即通常说的变频调速;运用到实际中的交流调速系统主要有:变级调速系统、串级调速系统、调压调速系统、变频调速系统1;1变极调速系统:调旋转磁场同步速度的最简单办法是变极调速;通过电动机绕组的改接使电机从一种极数变到另一种极数,从而实现异步电动机的有级调速;变极调速系统所需设备简单,价格低廉,工作也比较可靠,但它是有级调速,一般为两种速度,三速以上的变极电机绕组结构复杂,应用较少;变极调速电动机的关键在于绕组设计,以最少的线圈改接和引出头以达到最好的电机技术性能指标;2串级调速系统:绕线转子异步电动机串级调速是将转差功率加以利用的一种经济、高效的调速方法;改变转差率的传统方法是在转子回路中串入不同电阻以获得不同斜率的机械特性,从而实现速度的调节;这种方法简单方便,但调速是有级的,不平滑,并且转差功率消耗在电阻发热上,效率低;自大功率电力电子器件问世后,采用在转子回路中串联晶闸管功率变换器来完成馈送转差功率的任务,这就构成了由绕线异步电动机与晶闸管变换器共同组成的晶闸管串级调速系统;转子回路中引入附加电势不但可以改变转子回路的有功功率——转差功率的大小,而且还可以调节转子电流的无功分量,即调节异步电动机的功率因数;3调压调速系统:异步电动机电机转矩与输入电压基波的平方成正比,所以改变电机端电压基波可以改变异步电动机的机械特性以及它和负载特性的交点,来实现调速;异步电动机调压调速是一种比较简单的调速方法;在20世纪50年代以前一般采用串饱和电抗器来进行调速;近年来随着电力电子技术的发展,多采用双向晶闸管来实现交流调压;用双向晶闸管调压的方法有两种:一是相控技术,二是斩波调压;采用斩波控制方法可能调速不够平滑,所以在异步电机的调压控制中多用相控技术;但是采用相控技术在输出电压波形中含有较大的谐波,会引起附加损耗,产生转矩脉动15;4变频调速系统:在各种异步电机调速系统中,效率最高、性能最好的系统是变压变频调速系统;变压变频调速系统在调速时,须同时调节定子电源的电压和频率,在这种情况下,机械特性基本上平行移动,转差功率不变,它是当前交流调速的主要方向16;调压调速系统的优点是线路简单,价格便宜,使用维修方便,本文主要针对交流调压调速系统进行MATLAB仿真;下面对交流调压调速系统的原理及机械特性进行介绍;交流异步电动机调压调速系统三相交流调压电路交流调压调速需要三相交流调压电路,晶闸管三相交流调压电路的接线方式很多,工业上常用的是三相全波星形连接的调压电路;如图所示;这种电路的接法特点是负载输出谐波分量低,适用于低电压大电流的场合11;图三相全波星形连接的调压电路要使得该电路正常工作,必须满足下列条件:1在三相电路中至少有一相的正向晶闸管与另一相得反相晶闸管同时导通;2要求采用脉冲或者窄脉冲触发电路;3为了保证输出电压三相对称并且有一定的调节范围,要求晶闸管的触发信号除了必须与相应的交流电源有一致的相序外,各个触发信号之间还必须严格的保持一定的相位关系;即要求U、V、W三相电路中正向晶闸管即在交流电源为正半周时工作的晶闸管的触发信号相位互差120°,三相电路中的反向晶闸管的触发信号相位互差120°;在同一相中反并联的两个正、反向晶闸管的触发脉冲相位应互差180°;由上面结论,可得三相调压电路中各晶闸管触发的次序为VT 1、VT 2、VT 3、VT 4、VT 5、VT 6、VT 1以此类推;相邻两个晶闸管的触发信号相位差60°;在晶闸管交流调压中,晶闸管可借助于负载电流过零而自行关断,不需要另加换流装置,故线路简单、调试容易、维修方便、成本低廉,从而得到广泛的应用;调压调速原理根据异步电动机的机械特性方程式()()[]2'21212'211'221'22'211//33l l M L L s R R s R pU s R I P P T +++==Ω=ωωω 2-3其中 p ——电动机的极对数1U 、1ω——电动机定子相电压和供电角频率s ——转差率1R 、'2R ——定子每相电阻和折算到定子侧的转子每相电阻11L 、'12L ——定子每漏感和折算到定子侧的转子每相漏感可见,当转差率s 一定时,电磁转矩T 与定子电压1U 的平方成正比;改变定子电压可得到一组不同的人为机械特性,如图所示;在带恒转矩负载L T 时,可以得到不同的稳定转速,如图中的A,B,C 点,其调速范围较小,而带风机泵类负载时,可得到较大的调速范围,如图中的D,E,F 点;S S L m图 异步电动机在不同定子电压时的机械特性所谓调压调速,就是通过改变定子外加电压来改变电磁转矩T ,可得到较大的调速范围,从而在一定的输出转矩下达到改变电动机转速的目的13;为了能在恒转矩负载下扩大调压调速范围,使电机在较低速下稳定运行又不致过热,可采用电动机转子绕组有较高电阻值时的机械特性;在恒转矩负载下的交流力矩电动机的机械特性;图显示此类电动机的调速范围增大了,而且在堵转转矩下工作也不致烧毁电;动机14图交流力矩电机在不同定子电压时的机械特性闭环控制的调压调速系统系统的组成及其静特性异步电动机调压调速时,采用普通电机的调速范围很窄;并且在低速运行时候稳定性很差,在电网电压、负载有扰动时候会引起较大的转速变化;解决这些矛盾的根本方法是采用带转速负反馈的闭环控制,以达到自动调节转速的目的;在调速要求不高的情况下,也可采用定子电压负反馈闭环控制;图a是带转速负反馈的闭环调压调速系统原理图,图b是相应的调速系统静特性;如T在A点稳定运行,当负载增大导致转速下降时,通过转速反馈控制作用提果系统带负载L高定子电压,使得转速恢复,即在新的一条机械特性上找到了工作点A';同理,当负载减小使得转速升高时,也可以得到新的工作点A'';将工作点A''、A、A'连起来就是闭环系统的静特性1;M3a 原理图L e min 1Ub 静特性图 转速负反馈闭环控制的交流调压调速系统在额定电压N U 1下的机械特性和最小电压min 1U 下的机械特性是闭环系统静特性左右两边的极限,当负载变化达到两侧的极限时,闭环系统便失去控制能力,回到开环机械特性上工作14;对图a所示的系统,可画出系统静态结构图,见图所示:ASRL T -图 异步电动机调压调速系统的静态结构图图中:ctS U U K 1=----晶闸管交流调压器VVC 和触发装置GT 的放大系数; ct U ----触发装置的控制电压;n U n /=α----为转速反馈系数;n U ----测速发电机TG 输出的反馈电压;转速调节器ASR 采用PI 调节器;()T U f n ,1=是由式2-3描述的异步电动机械特性方程,它是一个非线性函数;近似的动态结构图异步电动机调压调速的近似动态结构图如下所示:U 图 异步电动机调压调速系统的近似动态结构图图中各环节的传递函数为:1 转速调节器ASR常用PI 调节器消除静差并改善动特性,其传递函数为:()ST S T K S W n n n ASR 1+= 2-4 2 晶闸管交流调压器和触发装置GT-V假定该环节输入输出关系是线性的,在动态中可近似为一阶惯性环节,其近似条件与晶闸管触发与整流装置一样;本环节传递函数可表示为:()1+=-TsS K S W S V GT 2-5 3 测速反馈环节FBS考虑到反馈滤波的作用, 传递函数为:()1+=S T S W on FBS α2-64 异步电动机MA由于描述异步电动机动态过程是一组非线性微分方程,只用一个传递函数来准确的表示异步电动机在整个调速范围内的输入输出关系式不可能的;只有做出一定的假设,并用稳态工作点附近微偏线性化的方法才能得到近似的传递函数;3 交流调压调速系统的MATLAB仿真系统的建模和模型参数设置主电路的建模和参数设置主电路主要由三相对称交流电压源、晶闸管、晶闸管三相交流调压器、交流异步电动机、电机信号分配器等部分组成;下面分别讨论三相交流电源、三相交流调压器、同步脉冲触发器、交流异步电动机、电机测试信号分配器的建模和参数设置问题16;三相交流电源的建模和参数设置首先从图中的电源模块组中选取一个交流电压源模块,再用复制的方法得到三相电源的另两个电压源模块,并把模块名称分别修改成A相、B相、C相;然后从图中的链接器模块组中选取“ground”元件也复制成三份,按图所示连接即可图Simulink中的电源模块图Simulink中的连接模块图三相交流电源的模型为了得到三相对称交流电压源,对其参数设置:双击A相交流电压源图标打开参数设置对话框,A相得参数设置分别是:幅值peak amplitude取220V、初相位Phase设置成 0、频率Frequency设置为50HZ,其他为默认值;B、C的参数设置方法与A相相同,除了将初相位设置成互差120以外,其它参数都与A相相同;由此可得到三相对称交流电源4;3.1.1.2晶闸管三相交流调压器的建模与参数设置晶闸管三相交流调压器通常是采用三对反并联的晶闸管元件组成,单个晶闸管元件采用“相位控制”方式,利用电网自然换流;图中所示为晶闸管三相交流调压器的仿真模型;图晶闸管三相交流调压器仿真模型子系统触发脉冲的顺序为V1-V2-V3-V4-V5-V6,其中V1-V3-V5之间和V4-V6-V2之间互差120度,V1-V4之间、V3-V6之间、V5-V2之间互差180度;双击晶闸管对话框得到晶闸管参数设置图,根据图中要求及系统要求对其进行参数设置如下:电阻Resistance Ron:40 Ω;电感Inductance Lon:0H;正向电压Forward voltage Vf:;初始电流Initial current Ic:0A;缓冲器电阻Subber resistance Rs:1200Ω;μ;缓冲器电容Subber capacitance Cs:250 F上图是用单个晶闸管元件按三相交流调压器的接线要求搭建成仿真模型的,单个晶闸管的参数设置仍然遵循晶闸管整流桥的参数设置原则,具体如下:如果针对某个具体的变流装置进行参数设置,对话框中的参数应取默认值进行仿真,若仿真结果理想,就可认可这些设置的参数,若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数;这一参数设置原则对其它环节的参数设置也是适用的18;在使用Simulink进行系统仿真分析时,首先需要进行模块参数设置,因此需要对系统中所有模块进行正确的参数设置;如果逐一的对各个系统进行参数设置时很繁琐的,因为子系统一般均为具有一定功能的模块组的集合,在系统中相当于一个单独的模块,具有特定的输入和输出关系;对于已经设计好的子系统而言,能够像Simulink模块库中的模块一样进行参数设置,则会给用户带来很大的方便,这时用户只需要对子系统参数选项中的参数进行设置,无需关心子系统的内部模块的实现;具体封装步骤如下:选择需要封装的子系统Subsystem,然后单击鼠标右键,在弹出的菜单中选择Mask Subsystem项,或者单击Edit-Mask Subsystem项19;这时将出现图中所示的封装编辑器;使用封装编辑器子系统中的图标、参数初始化设置对话框以及帮助文档,从而可使使用户设计出非常友好的模块界面,以充分发挥Simulink的强大功能;打开Mask editor:Subsystem对话框,如图所示;使用此编辑器可以对封装后的子系统进行各种编辑;在默认情况下,封装子系统不使用图标;但友好的子系统图标可使子系统的功能一目了然;为了增强封装子系统的界面友好性,用户可以自定义子系统模块的图标;只需在途中编辑对话框中的“图标和端口”选项卡中“绘制命令”栏中使用MATLAB 中相应便可以绘制模块图标,并可设置不同的参数控制图标界面的显示20;图 子系统封装编辑器下图为晶闸管三相交流调压器子系统封装图如下所示:aU bU cU a bcP图 三相交流调压器子系统封装图图中,Ua,Ub,Uc 分别连接三相交流电源的三相,P 连接从脉冲触发器出来的触发脉冲,输出a,b,c 分别连接交流电动机的A,B,C 输入4;同步脉冲触发器的建模和参数设置通常,工程上将触发器和晶闸管整流桥作为一个整体来研究,所以,在此处讨论同步脉冲触发器;同步脉冲触发器包括同步电源和6脉冲触发器两部分;6脉冲触发器可以从图所示的附加模块Extras Control Blocks 子模块组获得;图附加模块Extras Control Blocks子模块6脉冲触发器需要三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压;同步电源与6脉冲触发器符号图如下所示4:图同步脉冲触发器子系统同步脉冲触发器封装后子系统符合如下:UaUbUcOutIn2Uct图同步脉冲触发器封装后子系统符号然后根据主电路的连接关系,建立起主电路的仿真模型;图中ln2为脉冲器开关信号,当脉冲器开关信号为“0”时,开放触发器;为“1”时,封锁触发器4;交流异步电动机的建模和参数设置在Power System 工具箱中有一个电机模块库,它包含了直流电机、异步电机、同步电机以及其他各种电机模块;其中,模块库中有两个异步电动机模型,一个是标幺值单位制PI unit 下的异步电动机模型,另一个是国际单位制SI unit 下的异步电动机模型,本设计中采用后者;国际单位制下的异步电动机模型符号如图所示2:图 异步电动机模块其电气连接和功能分别为:A,B,C :交流电机的定子电压输入端子;m T :电机负载输入端子,一般是加到电机轴上的机械负载;a,b,c:绕线式转子输出电压端子,一般短接,而在鼠笼式电机为此输出端子;m:电机信号输出端子,一般接电机测试信号分配器观测电机内部信号,或引出反馈信号2;异步电动机模型参数设置如下;双击异步电动机的模型,即了得到参数设置对话框;分别对其进行参数设置如下所示6:1绕组类型Rotor type: 转子类型列表框,分别可以将电机设置为绕线式Wound 和鼠笼式Squirrel -cage 两种类型;在本文中用鼠笼式Squirrel -cage 异步电动机;2参考坐标系Reference Frame :参考坐标列表框,可以选择转子坐标系Rotor 、静止坐标系Stationary 、同步旋转坐标系Synchronous;在本文中选择同步旋转坐标系Synchronous ; 3额定参数: 额定功率n P KW 取30KW,线电压n V V 为380V ,频率f 赫兹为50HZ ; 4定子电阻s R Statorohm 取Ω和漏感ls L H 取为;5转子电阻r R Rotorohm 为Ω和漏感lr L H 取为;其它设置为默认值电动机测试信号分配器的建模和参数设置电动机测试信号分配器模块的模型图如下所示:图Machines Measurement Demux电动机测试信号分配器模块双击电动机测试信号分配模块得图电机测试信号分配器参数设置图;图电动机测试信号分配器参数设置对话框及参数选择图中:ir_abc:转子电流ira,irb,irc;ir_qd:同步d-q坐标下的q轴下的转子电流ir_q和d轴下的转子电流ir_d;phir_qd:同步d-q坐标下的q轴下的转子磁通phir_q和d轴下的转子磁通phir_d;vr_qd:同步d-q坐标下的q轴下的转子电压vr_q和d轴下的转子电压vr_d;is_abc:定子电流isa,isb,isc;is_qd:同步d-q坐标下的q轴下的定子电流is_q和d轴下的定子电流is_d;phir_qd:同步d-q坐标下的q轴下的定子磁通phis_q和d轴下的定子磁通phis_d;vs_qd:同步d-q坐标下的q轴下的定子电压vs_q和d轴下的定子电压vs_d;wm :电机的转速wm ;Te :电机的机械转矩Te ;Thetam :电机转子角位移Thetam 1;控制电路的建模和参数设置交流调压系统的控制电路包括:给定环节、速度调节器、限幅器、速度反馈环节等;控制电路的有关参数设置如下:速度反馈系数设为20;调节器的参数设置分别是:ASR :30=pn K ;300=n τ;上下限幅为400-0;其它没做说明的为系统默认参数;给定环节的建模与参数设置在调压调速的仿真模型中有几个给定环节,它可以从图中的输入源模块组中选取“constant ”模块,模块路径为Simulink/Commonly Used Blocks 14;图 输入源模块组然后双击该模块的图标,打开参数设置对话框,在该系统中用到两个给定模块,分别将给定值Constent value 设置为-20以及0两个;其它设置为默认值;实际调速时,给定信号是在一定的范围内变化的,我们可以通过仿真实践,确定给定信号允许的变化范围4;速度调节器的建模和参数设置速度调节器通常采用PI 控制,比例和积分参数的设置要根据系统的仿真结果不断地变化改动,以得到最稳定的输出特性以及动态特性;限幅器、速度反馈环节也一样;具体方法是分别设置这些参数的一个较大和较小的值进行仿真,弄清它们对系统性能影响的趋。
基于Simulink/Powerlib交流异步电机矢量控制的仿真

发展及 交流 电机 具有结构 简单、 维护 方便、高容 量、 高 效率等优 点 ,特别是大 规模集成 电路和 计算机控
制 技 术 的发 展 ,高 性 能 交 流 调 速 系 统 应 运 而 生 ,使 交 流 变 频 和 调 速 系 统 的应 用 越 来 越 广 泛 【 l 】 。 但 由于 交 流 电机 的模 型 是 一 个 高价 、 非 线 性 、强 耦 合 的多 变量 系统 [ 2 ] 以及 电力 传 动 系 统 的复 杂 性 ,使 得 对 它 的建 模 与 仿 真 一 直 是研 究 的热 点 。 目前 ,Ma t l a b逐 渐 发 展 成 为 一 个 集 数 值 分 析 、 图 像 处 理 、 信 号 处 理 、 数 学 建 模 、 动 态 仿 真 等 为 一
成 一 个 理 想 化 的两 极 电机 J 。图 1 f a ) 是 三 相 交 流 异 步 电机 在 A BC坐 标 系 中 的基 本 电机 模 型 。 其 中定 子 三 相 对 称 绕 组 分 别 用 、 、C表 示 ,转 子 三 相 对 称 绕 组分别用 a 、b 、C表 示 ,定 子 相 与 转 子 a相 绕 组 轴 线 问 的夹 角 为 , 定 子绕 组 静 止 不 动 ,转 子 绕
中图分 类 号 :T P 2 7 3 文 献标 志码 :A
S i mu l a t i o n o f Ve c t o r Co n t r o l o f AC As y n c h r o n o u s Mo t o r Ba s e d o n S i mu l i n k / P o we r l i b
Ke v wo r ds : AC a s v n c h r o n o u s mo t o r ; v e c t o r c o n t r o l ; p o we r s y s t e m mo d u l e b a s e
基于SIMULINK的扫描电机控制系统仿真

Ab ta t sr c:Elc r ma n ts mo e fs a tr i r s ac e n sa l h d Mahe tc n lss o e t0 g eim d lo c n moo s e e r h d a d e t b i e . t mais a ay i f s s a n n ta k s o l td y c n i g r c i c mpe e b Mal bCo to s se t . n rl y tm o sa moo i e in d b s d n i l t n y a f cn tr s d sg e a e o smuai b o SI MUL NK. n l h sc nr ls se smua in i ai ae yts. I Fial ti o to y tm i lto sv ld t db e t y Ke r s l crce g n e ig; smu ain; S M ULI ywo d :ee ti n i e rn i lto I Nm
1 引言
扫描 镜是一 种在 实践 中应用 很广 泛 的精 密伺服 系统 ,是 光 、机 、电综 合控 制系统 ,多 用于 控制光 路运动 、光路 跟 踪 等 。 扫 描 镜 的 应 用 从 卫 星 、导 弹 到 条 形 码 读 识 系 统 。 扫 描 镜 的 镜 面 为 Ol m O 0 m m 6 0 m, 扫 描 频 率 为 O2 3 z 10 H ” ,有 效扫描 幅值 为 25一 7 。 由于用途 和要求 不~样 ,扫描镜 电机 的结 构 、性 能和 驱动方 式差别 . H ~2k z 6 .。4 。
维普资讯
第 4卷
第3 期
信 息 与 电 子 工 程
I 0RMATI NF ON AND EL ECTRONI C ENGI ERI NE NG
matlabsimulink在电机中的仿真

模块化设计
集成优化工具
Simulink的模块化设计使得电机的各个部 分可以独立建模,然后通过模块的连接来 构建完整的系统模型,便于管理和修改。
Matlab提供了多种优化工具,可以对电机 控制系统进行优化设计,提高系统的性能 。
Matlab Simulink在电机仿真中的挑战
模型复杂度
电机的数学模型通常比较复杂,涉及大 量的非线性方程,这给模型的建立和仿
电机仿真的基本方法和流程
数学建模
根据电机的物理原理, 建立电机的数学模型, 包括电路方程、磁路 方程和运动方程等。
参数识别
根据实际电机的参数, 对数学模型进行参数 识别和调整,提高仿 真的准确性。
建立仿真模型
在Matlab Simulink 中建立电机的仿真模 型,包括电机本体和 控制系统的模型。
验证设计
通过仿真可以验证电机的设计是否满足要求, 提前发现并修正设计中的问题。
性能预测
仿真可以帮助预测电机的性能,包括转速、 转矩、效率等,为实际应用提供参考。
控制系统设计
通过仿真可以验证控制系统的设计是否正确, 提高控制系统的稳定性和精度。
降低成本
仿真可以减少试验次数,降低试验成本,缩 短研发周期。
04
案例分析
直流电机仿真案例
总结词
通过Simulink对直流电机进行仿真,可以模拟电机的启动、调速和制动等过程,为实际应用提供理论依据。
详细描述
在直流电机仿真案例中,我们使用Simulink的电机模块库来构建电机的数学模型。通过设置电机的参数,如电枢 电阻、电枢电感、励磁电阻和励磁电感等,可以模拟电机的动态行为。通过改变输入电压或电流,可以模拟电机 的启动、调速和制动等过程,并观察电机的响应特性。
电机控制基于Simulink的仿真

电机控制基于Simulink的仿真电机控制是现代工业中普遍使用的技术应用,其目的是控制电机的转速、转向、转矩等参数,来满足不同的运动要求。
而Simulink则是一种常用的控制系统仿真软件,可用于电机控制的建模和仿真分析。
本文主要介绍电机控制基于Simulink的仿真方法和实现过程。
一、基本原理在电机控制中,要确定电机的转速和电磁转矩,需要对电机的电源输入、电机的运动学和动力学特性进行建模和仿真。
其中,电机的运动学特性主要由转速和运动方向决定,动力学特性则由电机的电力、磁力和机械特性共同决定。
在建模时,可以采用模板库中现有的模型进行拼接组合,也可根据实际控制系统特性,自行设计模型进行仿真。
二、建模方法1、电机构建模在建模时,首先要得到电机的运动及动力学参数,并将其录入Simulink中。
一般情况下,电机的运动学参数可直接由编码器获取,而电机的动力学参数则需要通过实验测量得出。
对于直流电机等单一类型电机,可利用MathWorks公司提供的电机模板进行建模;而对于异步电机、同步电机等复杂电机,需要手动建立模型。
2、速度/位置控制模型在模型中,需要建立反馈控制回路,并选定控制器类型。
其中,速度/位置控制器主要分为P、PI、PID、LQR等多种类型,具体选择哪种控制器根据实际需求而定。
在建立速度/位置控制模型时,需要考虑控制系统的闭环稳定性,以保证系统达到预期效果。
3、驱动器模型驱动器是指将控制器的输出信号转换为电机的电力输入信号的电路。
在仿真中,常常使用MOS管等现代电子器件来模拟驱动器的功能。
驱动器模型的建立需要依据实际硬件最大输出电流和电压等参数进行调整。
三、仿真实现在Simulink中,将电机结构、速度/位置控制器和驱动器三者组合成完整的控制系统模型。
仿真时,需要指定电机的输入电压、控制器的PWM输出频率、控制器的增益系数等参数,并在控制器输出之前进行限制,以确保输出不会超过驱动器的最大电压值和电流值。
电机控制基于Simulink的仿真

控制系统 设计:用 于控制系 统的设计、 分析和优 化
THNK YOU
汇报人:
等
仿真结果分析: 分析仿真结果 包括步进电机 的转速、转矩、
位置等参数
仿真优化:根 据仿真结果对 步进电机控制 模型进行优化 提高控制精度
和稳定性
Simulink仿真的优 缺点和实际应用
Simulink仿真的优点
强大的建模能力:可以模拟 各种复杂的系统
易于使用:图形化界面易于 理解和操作
高效的仿真速度:可以快速 得到仿真结果
仿真结果分析和优化
仿真结果:电机转速、电流、扭矩 等参数
优化方法:调整控制参数、优化控 制算法
添加标题
添加标题
添加标题
添加标题
结果分析:分析仿真结果与实际工 况的差异
优化效果:提高电机控制精度、降 低能耗、提高效率
仿真案例分析
案例一:直流电机控制仿真
直流电机控制仿真概述 直流电机控制仿真模型搭建 直流电机控制仿真参数设置 直流电机控制仿真结果分析
搭建控制电路:包括电源、 控制器、电机等
设定仿真参数:如转速、 转矩、电流等
运行仿真:观察电机运行 情况分析结果
参数设置和仿真运行
电机模型选择: 根据实际需求选 择合适的电机模 型
控制策略设置: 设置PID控制器 参数如比例、积 分、微分系数等
仿真时间设置: 设置仿真运行的 时间范围
仿真运行:点击 运行按钮开始仿 真运行观察仿真 结果
闭环控制: 通过实时检 测电机的转 速、转矩和 位置并根据 检测结果调 整控制参数 实现对电机 的控制
自适应控制: 根据电机的 运行状态和 环境变化自 动调整控制 参数实现对 电机的控制
电机控制算法
基于Simulink的直流调速系统仿真及参数优化

基于Simulink的直流调速系统仿真及参数优化直流调速系统是一种经典的电机控制系统,其常见应用于电机的调速、转矩控制和位置控制等领域。
Simulink是一种广泛使用的仿真软件,可用于设计、分析和优化各种电控系统。
本文将介绍基于Simulink的直流调速系统仿真及参数优化。
步骤1:建立直流电机模型首先,在Simulink中建立直流电机模型,该模型将包含电机、电力电子模块、速度控制模块和反馈控制模块。
电机模型可以使用Simscape电气库或Simscape库中的电气模块进行建模,也可以手动建立电机模型。
在此,我们将采用Simscape电气库的电气模块进行建模。
步骤2:建立电力电子模块步骤3:建立速度控制模块速度控制模块用于实现电机的速度控制,可以采用基于PID控制器的反馈控制方法,也可以采用模型预测控制方法等高级控制方法。
在此,我们采用简单的PID控制器进行速度控制。
反馈控制模块用于将电机的实际转速与设定转速进行比较,并通过反馈电路对电机的控制信号进行调节。
在Simulink中,我们可以使用Simscape电气库中的传感器模块建立反馈控制模块。
步骤5:仿真分析在完成直流电机模型、电力电子模块、速度控制模块和反馈控制模块的建立后,我们可以进行仿真分析。
通过仿真,我们可以获得电机的转速、转矩、电流等参数,并进行分析和调试。
步骤6:参数优化在直流调速系统设计中,常常需要进行参数优化,以达到系统的最优性能。
首先,我们可以通过仿真分析的结果来确定系统的性能指标和优化目标;其次,我们可以采用优化算法,例如遗传算法、模拟退火算法、差分进化算法等,对系统的参数进行调节,以达到最优控制效果。
总结。
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
电机控制基于Simulink的仿真
• 单击Simulink工具栏中的“新建模型”图标; • 在MATLAB的命令窗口中选择File | New | New Model菜单项;
第5页,共191页。
依次表示新建、打开 系统模型文件
– Simulink 最重要的特性就是支持矩阵形式 的信号,它可以区分行和列向量并传递矩阵 。通过对模块做适当的配置,可以使模块能 够接受矩阵作为模块参数。
第23页,共191页。
• MATLAB Function与Function模块
除了使用上述的方式进行Simulink与MATLAB之间的数据 交互,用户还可以使用Functions and Tables 模块库中的 Function模块(简称为Fcn模块)或Functions and Tables 模块 库中的MATLAB Function模块(简称为MATLAB Fcn模块) 进行彼此间的数据交互。
(2) 在模块搜索栏中搜索所需的系统模块。
第10页,共191页。
• 例:简单系统的输入为一个正弦波信号,输出为此正弦
波信号与一个常数的乘积。要求建立系统模型,并以图形 方式输出系统运算结果。 • 已知系统的数学描述为
系统输入: u(t)=sin t , t≥0
系统输出: y(t)=au(t), a≠0
第14页,共191页。
3 Simulink模型仿真
• 系统模块参数设置与系统仿真参数设置
– 双击系统模块,打开系统模块的参数设置对话框。 – 在参数设置对话框中设置合适的模块参数。 • 设置合适的系统仿真参数以进行动态系统的仿真 – 在Simulation菜单的Simulation parameters...子菜单中
使用Simulink进行无刷直流电机控制仿真

使用Simulink进行无刷直流电机控制仿真无刷直流电机是一种常用于各种工业自动化和机器人应用中的电机类型。
与传统的直流电机相比,无刷直流电机具有较高的效率、较低的噪音和较长的寿命。
Simulink是一种功能强大的工具,用于进行动态系统建模和仿真。
在Simulink中,可以使用Simscape Power Systems工具箱对无刷直流电机进行模拟和控制。
在进行无刷直流电机控制仿真之前,首先需要建立电机的数学模型。
无刷直流电机的数学模型可以由电磁动力学定律得出。
模型包括电机的旋转动力学和电磁动力学部分。
电机的旋转动力学部分描述了转子速度和转矩之间的关系,而电磁动力学部分描述了电机的电流和磁场之间的关系。
建立无刷直流电机的数学模型后,可以在Simulink中进行仿真。
在Simulink中,可以使用不同的模块来模拟电机的不同部分,如电压源、电流控制器和速度控制器等。
可以使用电压源模块来模拟电机的输入电压,使用电流控制器模块来模拟电机的电流控制,使用速度控制器模块来模拟电机的速度控制。
此外,还可以使用作用在电机上的外部负载模块来模拟电机的负载情况。
在进行无刷直流电机控制仿真时,可以使用控制器来调整电机的输入电压和输出速度,以实现所需的转矩和速度控制。
在Simulink中,可以使用PID控制器模块来实现电机的控制。
PID控制器可以根据电机的输入电压和输出速度之间的误差来调整控制信号,以使电机的输出速度达到预期的目标值。
在完成无刷直流电机控制仿真后,可以使用Simulink中的数据可视化工具来分析仿真结果。
可以绘制电机输入电压、输出速度和负载转矩等变量随时间的变化曲线,以评估电机控制系统的性能。
总之,使用Simulink进行无刷直流电机控制仿真可以帮助工程师更好地了解电机的工作原理和性能。
通过仿真,可以优化电机控制系统的设计参数,提高电机的性能和效率。
同时,仿真还可以减少现场试验的时间和成本。
因此,Simulink是进行无刷直流电机控制仿真的理想工具。
基于Simulink仿真的BLDC系统

基于Simulink仿真的BLDC系统1.简介BLDC模块,可直接搜索,也可在下图库中找到。
BLDC电机,通常被视为PMSM的一种,因其采用集中式绕组设计,导致反电动势呈现出梯形波形。
这种特性使得BLDC电机与采用分布式定子绕组并产生正弦反电动势的PMSM 电机有所区别。
Simulink中BLDC电机模块的端口的初始情况有四个,左边为电气端口:~为三相端口,可以扩展为三相端口,n为中性相,与中性相相关的保留端口;右边为机械端口:R为电机转子,与电机转子相关的机械旋转端口,C为电机壳,与电机壳相关的机械旋转端口。
下图显示了定子绕组的等效电路以及转子上具有单极对的电机结构。
下图为梯形通量变化率,转子磁场由于永磁体产生的磁通随转子角度呈梯形变化率。
该图显示了通量的变化率。
2 仿真BLDC的反电势P1:在Simulink 中,创建一个场景,在三相端子打开的情况下转动电机轴,然后测量其中一个相位产生的电压以观察反电动势。
(1)目的:学会使用Simulink搭建关于三相BLDC 模型并研究其反电动势曲线。
(2)方法:1)在Simulink 库浏览器中,首先导航到永磁体并将BLDC 模块拖到画布上。
该模块表示具有梯形反电动势曲线的BLDC。
也可以直接搜索BLDC。
2)将三相端口~设置为扩展为三相端口,并设定转子和定子参数。
3)模块左侧的端口用于电气连接,右侧的端口用于机械连接。
为了创建开放式端子,将复合端口扩展到三相,然后将开路块(open circuit)连接到每个相。
为了将电机的中性相连接到地面,使用电气参考块(electrical reference)。
4)对于电机的机械连接,为了使电机轴转动,使用理想的角速度源块驱动电机。
可以将此块视为一个扭矩源,它将使转子遵循指定的角度轨迹。
机械参考连接到标有C 的端口。
5)将速度源模块具有第二个输入,即物理信号。
为了使电机以恒定速度旋转,将向块输入一个常数值。
该模块输出Simulink 信号,使用Simulink PS 转换器将其转换为物理信号。
基于MATLABSimulink的控制系统建模与仿真实践

基于MATLABSimulink的控制系统建模与仿真实践控制系统是现代工程领域中一个至关重要的研究方向,它涉及到对系统的建模、分析和设计,以实现对系统行为的控制和调节。
MATLAB Simulink作为一款强大的工程仿真软件,在控制系统领域有着广泛的应用。
本文将介绍基于MATLAB Simulink的控制系统建模与仿真实践,包括建立系统模型、进行仿真分析以及设计控制算法等内容。
1. 控制系统建模在进行控制系统设计之前,首先需要建立系统的数学模型。
MATLAB Simulink提供了丰富的建模工具,可以方便快捷地搭建系统模型。
在建模过程中,可以利用各种传感器、执行器、控制器等组件来描述系统的结构和功能。
通过连接这些组件,并设置其参数和初始条件,可以构建出一个完整的系统模型。
2. 系统仿真分析建立好系统模型后,接下来就是进行仿真分析。
MATLABSimulink提供了强大的仿真功能,可以对系统进行各种不同条件下的仿真实验。
通过改变输入信号、调节参数值等操作,可以观察系统在不同工况下的响应情况,从而深入理解系统的动态特性和性能指标。
3. 控制算法设计在对系统进行仿真分析的基础上,可以针对系统的性能要求设计相应的控制算法。
MATLAB Simulink支持各种常见的控制算法设计方法,如PID控制、状态空间法、频域设计等。
通过在Simulink中搭建控制算法,并与系统模型进行联合仿真,可以验证算法的有效性和稳定性。
4. 系统优化与调试除了基本的控制算法设计外,MATLAB Simulink还提供了优化工具和调试功能,帮助工程师进一步改进系统性能。
通过优化算法对系统参数进行调整,可以使系统响应更加迅速、稳定;而通过调试功能可以检测和排除系统中可能存在的问题,确保系统正常运行。
5. 实例演示为了更好地说明基于MATLAB Simulink的控制系统建模与仿真实践,接下来将通过一个简单的倒立摆控制系统实例进行演示。
使用Simulink进行无刷直流电机控制仿真

使⽤Simulink进⾏⽆刷直流电机控制仿真这段时间刚开始接触Matlab中的Simulink仿真,我就结合⾃⼰的专业,利⽤Simulink进⾏了⽆刷直流电机的仿真,因为Simulink⼯具箱⾥⾯有很多可⽤的模块,所以建模过程变得⾮常简单。
在Matlab界⾯中new->model之后,找到Simulink Library Browser,这⾥⾯有系统⾃带的很多模块,接下来我们就需要找到⾃⼰所需要的模块了,了解⽆刷直流电机的⼯作原理以后,接下来就是找到直流电源、三相逆变桥、⽆刷直流电机模型。
⽽Simulink中也有这些模型,可以直接通过搜索关键字找到它们,分别是DC Voltage Source、Universal Bridge、Permanent Magnetic Synchronous Machine。
接下来就是需要将相应的信号连接起来,如下图其中,直流端电压可以设置电压⼤⼩,逆变桥可以选择开关器件类型,我们这⾥选择Mosfet,PMSM中我们将反电势波形选择trapezoidal即梯形波,电机参数相电阻、相电感、反电势常数、极对数按实际值设置。
Universal Bridge对应如下桥式拓扑结构。
然后就是添加相应的负载Tm,这⾥可以模拟突加负载和突减负载以及任意变化的负载,通过给定⼀个函数就可以。
然后就是开关信号g,下⾯会详细介绍。
模型搭建完成后如下图。
PMSM输出端给的信号通过Bus Selector选择,我们需要使⽤的是三相霍尔信号得到相应的开关逻辑,这也是该仿真的关键所在,其中整个模型中Subsystem1就是实现开关逻辑的算法。
我们可以根据霍尔换相真值表,通过相应的逻辑门实现,但是这样搭建模型显得不灵活⽽且很累赘,并且不能模拟超前或者滞后换相。
所以我这⾥才⽤的是通过Matlab Function来实现的。
如上图,这是换相逻辑的模型,其中我采⽤的是下桥臂恒通,上桥臂PWM调制的⽅式导通Mosfet,⽬前占空⽐的给定⽅式采⽤的是常数,后续可以根据转速环进⾏PI给定。
电机控制基于Simulink的仿真ppt课件

系统模块 系统模块库
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
Simulink公共模块库
• Simulink中最为基础、最为通用的模块库,它可以被应用 到不同的专业领域中。 – 连续模块continuous、非连续模块discontinuous – 离散模块discrete、查找表模块Look-up Table – 数学运算Math Operations – 模型验证模块Model Verification – 模型扩充工具Model-Wide Utilities – 端口和子系统模块Ports & Subsystems、 – 信号属性模块Signal Attributes – 信号路由模块Signal Routing、接收模块Sinks – 输入模块Sources – 用户自定义函数模块User-Defined Functions
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
Simulink应用领域
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
2 Simulink启动及模型建立
Simulink的启动主要有以下两种方法:
– 在MATLAB的命令窗口中输入simulink,结果 是在桌面上出现一个Simulink Library Browser的窗口。 – 单击MATL窗口 。
TI DSP Developer’s Kit
Motorola DSP开发工具箱
TI DSP开发工具箱
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
对Simulink库浏览器的基本操作有:
基于Simulink的永磁同步电机矢量控制系统仿真
组 合 机 床 与 自 动 化 加 工 技 术
M o l r M a hi e To l& A u o a i a f c urng Te hn qu du a c n o t m tc M nu a t i c i e
NO. 2
Fe b. 2 1 0 1
A b t a t I o a SA C s r o s tm ,t e ve t rc nto h o y n VPW M e hnq e m a e t C sr c : n t d v’ e v yse h co o r 1t e r a d S t c iu k heA m o o a c iv h ro m a c sg o s DC o o e e in n heA C s r o s tm ,S edi・ t rc n a h e et epe f r n e a o d a m t rwh n d sg i gt ev yse O w s C S h ncpl nd t epr c d r VPW M n deala d i r d e t e prn i ft e s r t r U S t e pr i a h e u eofS i e o i t i n nto uc h cpl o h evo mo o i e c nr1 o to .PM M i o l e r s tm i i i c ntc u i . em o eig m eh d f rPM M s tm S s a n n i a yse w t sg f a o pl n h n i ng Th d l fPM S ih Ve t r Co t o s d O m u a in M w t co n r lBa e R Si l to
基于Matlab_Simulink的永磁同步电机(PMSM+)矢量控制仿真(2)1
基于Matlab/Simulink的永磁同步电机(PMSM)矢量控制仿真高延荣,舒志兵,耿宏涛摘要在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(SVPWM)技术使得交流电机能够获得和直流电机相媲美的性能。
永磁同步电机(PMSM)是一个复杂耦合的非线性系统。
本文在Matlab/Simulink环境下,通过对PMSM本体、d/q坐标系向a/b/c坐标系转换等模块的建立与组合,构建了永磁同步电机控制系统仿真模型。
仿真结果证明了该系统模型的有效性。
关键词:Matlab/Simulink,永磁同步电机,电压空间矢量脉宽调制,仿真0、引言永磁同步电机(PMSM)是采用高能永磁体为转子,具有低惯性、快响应、高功率密度、低损耗、高效率等优点,成为了高精度、微进给伺服系统的最佳执行机构之一。
永磁同步电机构成的永磁交流伺服系统已经向数字化方向发展。
因此如何建立有效的仿真模型具有十分重要的意义。
对于在Matlab中进行永磁同步电机(PMSM)建模仿真方法的研究已经受到广泛关注。
本文介绍了电压空间矢量脉宽调制原理并给出了坐标变换模块、SVPWM模块以及整个PMSM闭环矢量控制仿真模型,给出了仿真模型结构图和仿真结果。
1、电压空间矢量脉宽调制原理1.1电压空间矢量电机输入三相正弦电压的最终目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。
直接针对这个目标,把逆变器和异步电机视为一体,按照跟踪圆形旋转磁场来控制PWM电压,这样的控制方法称为“磁链跟踪控制”,磁链的轨迹是靠电压空间矢量相加得到的,所以又称“电压空间矢量PWM控制”。
空间矢量是按电压所加绕组的空间位置来定义的。
在图1中,A、B、C分别表示在空间静止不动的电机定子三相绕组的轴线,它们在空间互差120°,三相定子相电压UA、UB、UC 分别加在三相绕组上,可以定义三个电压空间矢量UA、UB、UC,它们的方向始终在各相的轴线上,而大小则随时间按正弦规律变化,时间相位互差120°。
实验四:基于Simulink的控制系统仿真
实验四:基于Simulink 的控制系统仿真实验目的1. 掌握MATLAB 软件的Simulink 平台的基本操作; 2. 能够利用Simulink 平台研究PID 控制器对系统的影响;实验原理PID (比例-积分-微分)控制器是目前在实际工程中应用最为广泛的一种控制策略。
PID 算法简单实用,不要求受控对象的精确数学模型。
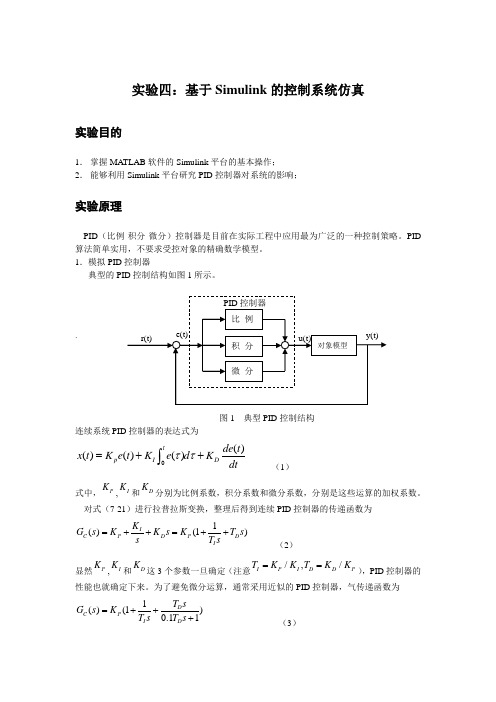
1.模拟PID 控制器典型的PID 控制结构如图1所示。
`图1 典型PID 控制结构 连续系统PID 控制器的表达式为()()()()tp I Dde t x t K e t K e d K dt ττ=++⎰ (1)式中,P K ,IK 和DK 分别为比例系数,积分系数和微分系数,分别是这些运算的加权系数。
对式(7-21)进行拉普拉斯变换,整理后得到连续PID 控制器的传递函数为1()(1)I C P D P D I K G s K K s K T s s T s =++=++ (2)显然P K ,IK 和DK 这3个参数一旦确定(注意/,/I P I D D PT K K T K K ==),PID 控制器的性能也就确定下来。
为了避免微分运算,通常采用近似的PID 控制器,气传递函数为1()(1)0.11D C P I D T s G s K T s T s =+++ (3)实验过程PID 控制器的P K ,I K 和D K 这3三个参数的大小决定了PID 控制器的比例,积分和微分控制作用的强弱。
下面请通过一个直流电动机调速系统,利用MA TLAB 软件中的Simulink 平台,使用期望特性法来确定这3个参数的过程。
并且分析这3个参数分别是如何影响控制系统性能的。
【问题】某直流电动机速度控制系统如图2所示,采用PID 控制方案,使用期望特性法来确定P K ,IK 和DK 这3三个参数。
期望系统对应的闭环特征根为:-300,-300,-30+j30和-30-j30。
请建立该系统的Simulink 模型,观察其单位阶跃响应曲线,并且分析这3个参数分别对控制性能的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
Simulink的部分专业模块库 的部分专业模块库
DSP Blockset Fixed-Point Blockset Power System Blockset Dials & Gauges Blockset Communications Blockset CDMA Reference Blockset CDMA Nonlinear Control Design Blockset Motorola DSP Developer’s Kit TI DSP Developer’s Kit 数字信号处理工具包 定点运算控制系统仿真工具包 电力电动系统工具包 交互图形和控制面板设计工具包 通讯系统工具包 CDMA通讯系统设计和分析工具包 通讯系统设计和分析工具包 非线性控制设计工具箱 Motorola DSP开发工具箱 开发工具箱 TI DSP开发工具箱 开发工具箱
来自Signal Routing 来自 的Bus Creator
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
3 Simulink模型仿真 模型仿真
• 系统模块参数设置与系统仿真参数设置
– 双击系统模块,打开系统模块的参数设置对话框。 双击系统模块,打开系统模块的参数设置对话框。 – 在参数设置对话框中设置合适的模块参数。 在参数设置对话框中设置合适的模块参数。
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
相关操作: 相关操作:
• 模块库
– Sine Wave来自 来自sources; Gain来自 来自Math Operations; 来自 来自 ; Scope来自 来自Sinks 来自
• 连接方法
(1)拖动对应端口进行连接 (1)拖动对应端口进行连接 (2)单击起始模块后,按Ctrl键再单击目标模块 单击起始模块后, 单击起始模块后 键再单击目标模块
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
Simulink模型窗口的建立 模型窗口的建立
中打开一个空白的模型窗口的方法: 在Simulink中打开一个空白的模型窗口的方法: 中打开一个空白的模型窗口的方法
• 选中 选中Simulink菜单系统中的 菜单系统中的File | New | Model菜单项后, 菜单项后, 菜单系统中的 菜单项后 会生成一个Simulink窗口; 窗口; 会生成一个 窗口 • 单击 单击Simulink工具栏中的“新建模型”图标; 工具栏中的“ 工具栏中的 新建模型”图标; • 在MATLAB的命令窗口中选择 的命令窗口中选择File | New | New Model菜 的命令窗口中选择 菜 单项; 单项;
• 与MATLAB工具箱的集成 工具箱的集成
– 由于 由于Simulink可以直接利用 可以直接利用MATLAB的诸多资 可以直接利用 的诸多资 源与功能, 源与功能,因而用户可以直接在 Simulink下完 下完 成诸如数据分析、过程自动化、 成诸如数据分析、过程自动化、优化参数等工 作。
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
连线操作
• 连线分支
– 使用鼠标右键单击需要分支的信号连线(光标 使用鼠标右键单击需要分支的信号连线( 变成“ ),然后拖动到目标模块。 ),然后拖动到目标模块 变成“+”),然后拖动到目标模块。
• 使用鼠标左键单击并拖动以改变信号连线 的路径。 的路径。 • 按下 按下Shift键的同时,在信号连线上单击鼠 键的同时, 键的同时 标左键并拖动,可以生成新的节点。 标左键并拖动,可以生成新的节点。 • 在节点上使用鼠标左键单击并拖动,可以 在节点上使用鼠标左键单击并拖动, 改变信号连线路径。 改变信号连线路径。
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
对Simulink库浏览器的基本操作有: 库浏览器的基本操作有: 库浏览器的基本操作有
(1) 使用鼠标左键单击系统模块库,如果模块库为多层结构, 使用鼠标左键单击系统模块库,如果模块库为多层结构, 号载入库。 则单击“ 号载入库 则单击“+”号载入库。 (2) 使用鼠标右键单击系统模块库,可在单独的窗口打开库。 使用鼠标右键单击系统模块库,可在单独的窗口打开库 打开库。 (3) 使用鼠标左键单击系统模块,在模块描述栏中显示此模块 使用鼠标左键单击系统模块,在模块描述栏中显示此模块 的描述。 的描述。 (4) 使用鼠标右键单击系统模块,可以得到:系统模块的帮助 使用鼠标右键单击系统模块,可以得到: 信息; 将系统模块插入到系统模型中; 信息 将系统模块插入到系统模型中 查看系统模块的参数 设置; 以及回到系统模块的上一层库 回到系统模块的上一层库。 设置 以及回到系统模块的上一层库。 此外还可以进行以下操作: 此外还可以进行以下操作: (1) 使用鼠标左键选择并拖动系统模块,并将其拷贝到 使用鼠标左键选择并拖动系统模块, 系统模型中。 系统模型中。 (2) 在模块搜索栏中搜索所需的系统模块。 在模块搜索栏中搜索所需的系统模块。
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
• 例:简单系统的输入为一个正弦波信号,输出为 简单系统的输入为一个正弦波信号,
此正弦波信号与一个常数的乘积。 此正弦波信号与一个常数的乘积 。 要求建立系统 模型,并以图形方式输出系统运算结果。 模型,并以图形方式输出系统运算结果。 • 已知系统的数学描述为 系统输入: 系统输入: u(t)=sin t , t≥0 系统输出: 系统输出: y(t)=au(t), a≠0
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
依次表示新建、 依次表示新建、打开 系统模型文件
依次表示新建、打开与 依次表示新建、 保存系统模型文件
启动Simulink,建立系统模型的基本操作 , 启动
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
Simulink应用领域 应用领域
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计仪Fra bibliotek科学与电气工程学院
2 Simulink启动及模型建立 启动及模型建立
Simulink的启动主要有以下两种方法: 的启动主要有以下两种方法: 的启动主要有以下两种方法
– 在MATLAB的命令窗口中输入 的命令窗口中输入simulink,结果 结果 的命令窗口中输入 是在桌面上出现一个Simulink Library 是在桌面上出现一个 Browser的窗口。 的窗口。 的窗口 – 单击 单击MATLAB主窗口的快捷按钮 ,打开 主窗口的快捷按钮 Simulink Library Browser窗口 。 窗口
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
• 提供了仿真库的扩充和定制机制
– Simulink的开放式结构允许用户扩展仿真环境 的开放式结构允许用户扩展仿真环境 的功能:采用MATLAB、FORTRAN和C代码 的功能:采用 、 和 代码 生成自定义模块库,并拥有自己的图标和界面。 生成自定义模块库,并拥有自己的图标和界面。
仪器科学与电气工程学院
Simulink的模块库 的模块库
• Simulink的模块库能够对系统模块进行有效的管理与组织 的模块库能够对系统模块进行有效的管理与组织 可以直接将模块库中的模块拖动或者拷贝到用户的系统模 型中以构建动态系统模型。 型中以构建动态系统模型。
模块搜索 模块描述
系统模块 系统模块库
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
信号组合
在利用Simulink进行系统仿真时,在很多 进行系统仿真时, 在利用 进行系统仿真时 情况下,需要将系统中某些模块的输出信号( 情况下,需要将系统中某些模块的输出信号(一 般为标量)组合成一个向量信号,并将得到的信 般为标量)组合成一个向量信号, 号作为另外一个模块的输入。 号作为另外一个模块的输入。
• 设置合适的系统仿真参数以进行动态系统的仿真
– 在Simulation菜单的 菜单的Simulation parameters...子菜单 菜单的 子菜单 中进行设置, 中进行设置,如仿真时间等
• 运行仿真
– 单击系统模型编辑器上的 单击系统模型编辑器上的Play图标 黑色三角 或选择 图标(黑色三角 图标 黑色三角)或选择 Simulation菜单下的 菜单下的Start便可以对系统进行仿真分析。 便可以对系统进行仿真分析。 菜单下的 便可以对系统进行仿真分析 – 仿真结束后双击 仿真结束后双击Scope模块以显示系统仿真的输出结 模块以显示系统仿真的输出结 果
电机控制课程设计
MATLAB/Simulink设计 MATLAB/Simulink设计
主讲: 主讲:段清明 仪器科学与电气工程学院
电机控制课程设计: 电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
1 Simulink简介
• Simulink是一个用来对动态系统进行建模、仿真 是一个用来对动态系统进行建模、 是一个用来对动态系统进行建模 和分析的软件包。使用Simulink来建模、分析和 来建模、 和分析的软件包。使用 来建模 仿真各种动态系统(包括连续系统、离散系统和 包括连续系统 仿真各种动态系统 包括连续系统、离散系统和混 合系统),将是一件非常轻松的事情。 合系统 ,将是一件非常轻松的事情。它提供了一 种图形化的交互环境, 种图形化的交互环境,只需用鼠标拖动的方法便 能迅速地建立起系统框图模型, 能迅速地建立起系统框图模型,甚至不需要编写 一行代码。 一行代码。 • 利用 利用Simulink进行系统的建模仿真,其最大的优 进行系统的建模仿真, 进行系统的建模仿真 点是易学、易用,并能依托MATLAB提供的丰富 点是易学、易用,并能依托 提供的丰富 的仿真资源。 的仿真资源。