自动控制原理第五章课后习题答案(免费)[1]
自动控制原理考试试题第五章习题及答案
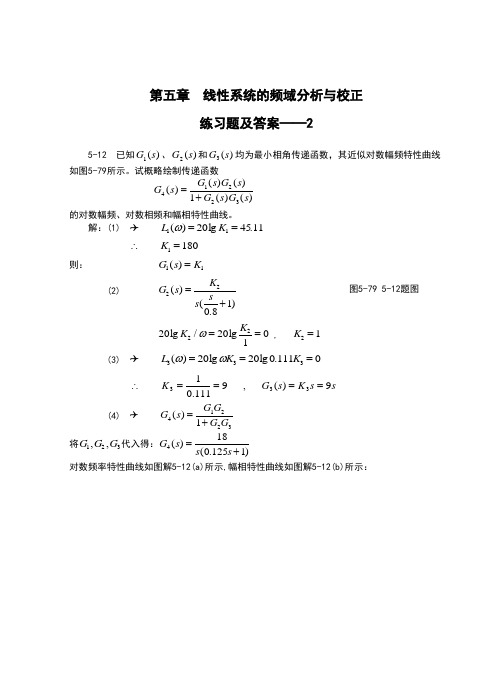
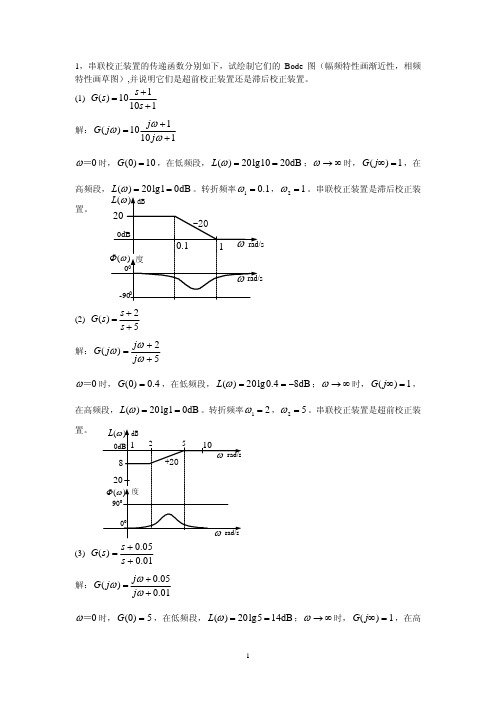
第五章 线性系统的频域分析与校正练习题及答案——25-12 已知)(1s G 、)(2s G 和)(3s G 均为最小相角传递函数,其近似对数幅频特性曲线如图5-79所示。
试概略绘制传递函数 G s G s G s G s G s 412231()()()()()=+的对数幅频、对数相频和幅相特性曲线。
解:(1) ✈L K 11204511()lg .ω== ∴=K 1180则: G s K 11()=(2) G s K s s 22081()(.)=+20201022lg /lg K K ω== , K 21= (3) ✈L K K 333202001110()lg lg .ωω===s s K s G K 9)(,9111.01333====∴(4) ✈G s G G G G 412231()=+ 将G G G 123,,代入得:G s s s 41801251()(.)=+对数频率特性曲线如图解5-12(a)所示,幅相特性曲线如图解5-12(b)所示:图解5-12 (a) Bode图 (b) Nyquist图5-13 试根据奈氏判据,判断题5-80图(1)~(10)所示曲线对应闭环系统的稳定性。
已知曲线(1)~(10)对应的开环传递函数如下(按自左至右顺序)。
题号开环传递函数P N NPZ2-=闭环稳定性备注1G sKT s T s T s()()()()=+++1231110-12不稳定2G sKs T s T s()()()=++1211000稳定3G sKs Ts()()=+210-12不稳定4 G s K T s s T s T T ()()()()=++>12212110 0 0 稳定 5 G s K s ()=30 -1 2 不稳定 6 G s K T s T s s ()()()=++123110 0 0 稳定 7 G s K T s T s s T s T s T s T s ()()()()()()()=++++++5612341111110 0 0 稳定 8 G s KT s K ()()=->1111 1/2 0 稳定 9 G s KT s K ()()=-<1111 0 1 不稳定 10G s Ks Ts ()()=-11-1/22不稳定5-14 已知系统开环传递函数,试根据奈氏判据,确定其闭环稳定的条件:)1)(1()(++=s Ts s Ks G ; )0,(>T K(1)2=T 时,K 值的范围; (2)10=K 时,T 值的范围; (3)T K ,值的范围。
自控原理第五章习题参考答案

5-1 5()0.251G s s =+5()0.251G j j ωω=+()A ω=()arctan(0.25)ϕωω=-输入 ()5cos(430)5sin(460) =4r t t t ω=-︒=+︒(4)A ==(4)arctan(0.25*4)45ϕ=-=-︒系统的稳态输出为()(4)*5cos[430(4)]3045)17.68cos(475)17.68sin(415)c t A t t t t ϕ=-︒+=-︒-︒=-︒=+︒ sin cos(90)cos(90)cos(270)αααα=︒-=-︒=+︒或者,()(4)*5sin[460(4)]6045) 17.68sin(415)c t A t t t ϕ=+︒+=+︒-︒=+︒所以,对于cos 信号输入下的稳态输出计算规律与sin 信号作用下计算相同。
5-3(2)1()(1)(12)G s s s =++ 1()(1)(12)G j j j ωωω=++()A ω=()arctan arctan 2ϕωωω=--起点:0ω= (0)1;(0)0A ϕ==︒ 位于正实轴上。
终点:ω→∞ ()0;()180A ϕ∞=∞=-︒+∆ 从第三象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()arctan arctan 290ϕωωω=--=-︒ arctan arctan 290ωω+=︒所以有,1/(2)ωω= 21/2ω=()0.473A ω=== 因此,与虚轴的交点为(0,-j0.47)()ω(3)1()(1)(12)G s s s s =++ 1()(1)(12)G j j j j ωωωω=++()A ω=()90arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)90A ϕ=∞=︒∆-- 位于负虚轴(左侧)无穷远方向终点:ω→∞ ()0;()270A ϕ∞=∞=-︒+∆ 从第二象限趋于原点因此,,Nyquist 曲线与实轴有交点,并且满足:()90arctan arctan 2180ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=2()0.673A ω===与实轴的交点为(-0.67,-j0))ω(4)21()(1)(12)G s s s s =++ 21()()(1)(12)G j j j j ωωωω=++()A ω=()180arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)180A ϕ=∞=︒∆-- 位于负实轴(上侧)无穷远方向终点:ω→∞ ()0;()360A ϕ∞=∞=-︒+∆ 从第一象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()180arctan arctan 2270ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=()0.94A ω===与虚轴的交点为(0,j0.94))ω=5-4(2)10.5ω=,21ω=,1K =,0ν=(3)10.5ω=,21ω=,1K =,1ν=低频段直线(延长线)与0db 线交点的频率为:1/cK νω'=。
自动控制原理简明教程第二版课后答案第五章习题答案
5-13 试用奈氏判据分宾判断题 5-5,5-6 系统的闭环稳定性。 解:5-5 (1)τ > T 时系统闭环稳定。 (2)T >τ 5-6 (1)ν =1 时系统闭环稳定。 (2)ν = 2,3,4 时系统闭环不稳定。 5-14 已知下列系统开环传递函数(参数 K,T,Ti > 0;i = 1,2,,6 ) : 时系统闭环不稳定。
8
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
L(ω ) (dB)
60 40 20
-20 -40 -20
0
0.1 1 2 10
-40 20 -60
100ω
ω 0 − 90
−180
5-11 绘制下列函数的对数幅频渐进特性曲线:
2
(1)G(s) =
(2s +1)(8s +1) 200 (2)G(s) = s 2(s +1)(10s +1)
1
所以:G(s) = 100(0.001s/ω
1
+1)
(s
/ω 1 +1)(s /100 +1)
11
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
(b)G(s) = s 102 (s(s/ω /ω
21
++11) )
(c)
G(s) = (s
2
2ξ ω nKs+2ω + s
n 2
ω
n
2
)(s /10 +1)
0.5 −87.2
1 −92.1
3 −164
5 − 216
7 − 234.5
10 − 246
(完整版)自动控制原理课后习题及答案
第一章 绪论1-1 试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1) 优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+ (4)()2()()sin dy t y t u t tdt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++= (6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dt dt =++⎰解答: (1)线性定常 (2)非线性定常 (3)线性时变 (4)线性时变 (5)非线性定常 (6)非线性定常 (7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
自动控制原理第五章课后答案

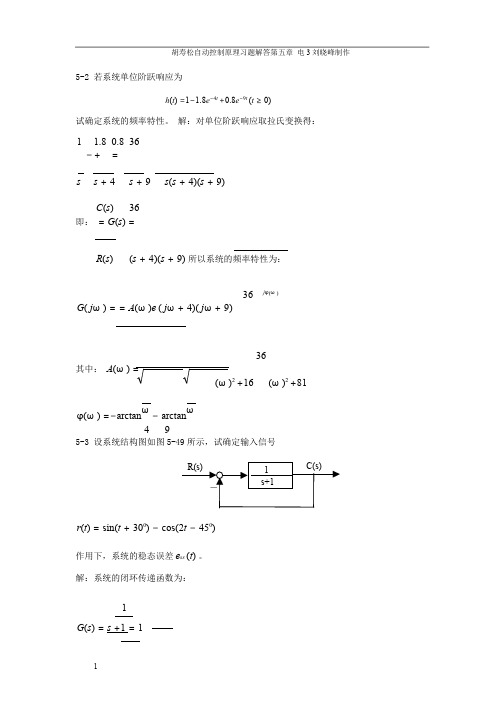
五 频域分析法2-5-1 系统单位阶跃输入下的输出)0(8.08.11)(94≥+-=--t e e t c tt ,求系统的频率特性表达式。
【解】: 98.048.11)]([L )(1+++-==-s s s t c s C 闭环传递函数)9)(4(36198.048.11)()()(++=+++-==s s ss s s s R s C s G )9tg 4(tg 2211811636)9)(4(36)(ωωωωωωω--+-+⨯+=++=j ej j j G2-5-2系统时,系统的稳态输出(1))30sin()(0+=t t r ; (2))452cos(2)(0+=t t r ;(3))452cos(2)30sin()(00--+=t t t r 。
【解】:求系统闭环传递函数5tg 21254)5(4)(54)(1)()()()(14)(ωωωω--+=+=+=+==+=j B K K B K ej j G s s G s G s R s C s G s s G根据频率特性的定义,以及线性系统的迭加性求解如下:(1)︒===30,1,11θωr A︒--====-3.1151tg )1(178.0264)1()(1j j j B e eeA j G θωω[])7.18sin(78.0)1(sin )1()sin()(12︒+=++=+=t t A A t A t c r c s θθθ(2)︒===45,2,21θωr A︒--==+=-8.2152tg 274.02544)(1j j B e ej G ωω)2.232cos(48.1)(︒+=t t c s(3))8.662cos(48.1)7.18sin(78.0)(︒--︒+=t t t c s2-5-3 试求图2-5-3所示网络的频率特性,并绘制其幅相频率特性曲线。
【解】:(1)网络的频率特性1)(111)(212212+++=+++=ωωωωωC R R j C jR C j R R C j R j G(2)绘制频率特性曲线)tg (tg 22212121111)(1)(11)(ωωωωωωωT T j eT T jT jT j G ---++=++= 其中1221221,)(,T T C R R T C R T >+==。
自动控制原理第五版课后答案完整版

1-1 图1-2是液位自动控制系统原理示意图。在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统
解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位(表征液位的希望值);比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
(4)因为c(t)的表达式中r(t)的系数为非线性函数,所以该系统为非线性系统。
(5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。
(6)因为c(t)的表达式中包含变量的二次项,表示二次曲线关系,所以该系统为非线性系统。
(7)因为c(t)的表达式可写为,其中,所以该系统可看作是线性时变系统。
解:(1)
① n=3,根轨迹有3条分支,且均趋于无穷远处;
② 实轴上的根轨迹:[-50,0],(00];
③ 渐进线:,;
④ 分离点:
求解得:,(舍去);
作出根轨迹如图所示:
(2)临界开环增益为根轨迹与虚轴交点对应的开环增益。
令,代入,并令其实部、虚部分别为零,即
,
解得:(舍去)
当时,
当时,
当时,
3-11设随动系统的微分方程为
其中,T1、T2和K2为正常数。若要求r(t)=1+ t时,c(t)对r(t)的稳态误差不大于正常数ε0,试问K1应满足什么条件?
分析:先求出系统的误差传递函数,再利用稳态误差计算公式,根据题目要求确定参数。
解: 由题意知:
因为该系统为Ⅰ型系统,且输入为单位速度信号时,系统的稳态误差为0.1,即
所以:
自动控制原理及其应用课后习题第五章答案
ω
20 0 -20
10 ωc
1
2 -20dB/dec
ω
-60dB/dec
10 ≈1 ω2 0.5 c
ω c=4.5
5 ≈1 ω c=7.9 ω 0.01 c3
第五章习题课 (5-17)
-20
低频段曲线: 低频段曲线: 20lgK=20dB φ (ω ) 0 ω1=5 ω2=15 -90 相频特性曲线: 相频特性曲线: -180 -270 φ ( )= -90o ω ω=0 φ ( )= -270o ω ω=∞
-60dB/dec
ω
第五章习题课 (5-2)
10(s+0.2) 1.33(5s+1) (5) G(s)= s2(s+0.1)(s+15)=s2(10s+1)(0.67s+1) 解: 低频段曲线: 低频段曲线: 20lgK=2.5dB
第五章习题课 (5-7)
5-7 已知奈氏曲线,p为不稳定极点个数, 已知奈氏曲线, 为不稳定极点个数 为不稳定极点个数, υ为积分环节个数,试判别系统稳定性。 为积分环节个数,试判别系统稳定性。 Im υ=2 (b) p=0 (a) p=0 Im υ=0
ω=0 Re -1 0 ω=0+ -1 0 ω=0 Re
第五章习题课 (5-1)
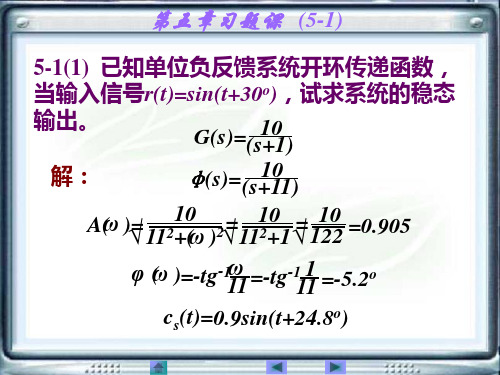
5-1(1) 已知单位负反馈系统开环传递函数, 已知单位负反馈系统开环传递函数, 当输入信号r(t)=sin(t+30o),试求系统的稳态 当输入信号 , 输出。 输出。 10 G(s)=(s+1) 10 解: φ(s)= (s+11) 10 = 10 = 10 ω A( )= 2 2 112+1√ 122 =0.905 √ 11 +( ) √ ω φ ( )=-tg-1ω =-tg-1 1 =-5.2o ω 11 11 cs(t)=0.9sin(t+24.8o)
自动控制原理卢京潮主编课后习题答案西北工业大学出版社

自动控制原理卢京潮主编课后习题答案西北工业大学出版社SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#第五章 线性系统的频域分析与校正习题与解答5-1 试求题5-75图(a)、(b)网络的频率特性。
(a) (b)图5-75 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sC R sC R R R s U s U r c ττ (b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c)(1111)()(2122222212ττ 5-2 某系统结构图如题5-76图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s(1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r 解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5-3 若系统单位阶跃响应 试求系统频率特性。
自动控制原理第五章课后习题答案(免费)[1]
![自动控制原理第五章课后习题答案(免费)[1]](https://img.taocdn.com/s3/m/11139471f46527d3250ce001.png)
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
《自动控制原理》第五章习题解答

2 ωn s( s + 2ζω n )
G( s) =
当取 r (t ) = 2 sin t 时,系统的稳态输出
css (t ) = 2 sin(t − 450 )
试确定系统参数 ω n , ζ 。 解:根据公式(5-16)和公式(5-17) 得到: c ss (t ) = A G B ( jω ) sin(ωt + ϕ + ∠G B ( jω ))
根据题目给定的条件: ω = 1 A = 2 所以: G B ( jω ) =
2 (ω n − ω 2 ) + (2ζω nω ) 2
=
=1
(1)
∠G B ( jω ) = − arctan
2ξω nω 2ξω = − arctan 2 n = −45 0 2 2 ωn − ω ωn −1
(2)
由式(1)得 ω n = (ω n − 1) + ( 2ζω n )
20
ϕ (ω )
− 89 o
− 87.2 o
− 92.1o − 164 o
− 216 o
− 234.5 o
− 246 o
− 254 o
− 258 o
ω
30
50
100
ϕ (ω )
− 262 o
− 265 o
− 267.7 o
作系统开环对数频率特性图,求得 ω c = 1 ,系统的穿越频率 ω r = 18 系统的幅值裕度和相角裕度为 h =
-26
-20
5-12 已知最小相位系统的对数幅频渐进特性曲线如图 5-50 所示, 试确定系统的开环传递函 数。 解: (a) G ( s ) =
《自动控制原理》第5章习题答案
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
− p2
-10 -5
− p1
0
σ
②计算期望主导极点位置。
超调量σ% ≤ 20%,调整时间 ts ≤ 0.5s
4
ζω n
= 0.5s , ζω n = 8
σ%=e
−
ζπ
1−ζ 2
= 0.2 , ζ = 0.45 , θ = 63.2 0
故,期望主导极点位置, s1, 2 = −8 ± j15.8
期望极点
Gc ( s ) =
4,控制系统的结构如图 T5.3 所示,Gc(s)为校正装置传递函数,用根轨迹法设计校正装置,
使校正后的系统满足如下要求,速度误差系数 Kv ≥ 20,闭环主导极点 ω n = 4 ,阻尼系数 保持不变。
R(s)
+ -
Gc(s)
4 s ( s + 2)
Y(s)
图 T5.3
解:①校核原系统。
14
+20
0dB
1
Φ (ω ) 度
900 00
5
ω rad/s
ω rad/s
2,控制系统的结构如图 T5.1 所示,试选择控制器 Gc(s), 使系统对阶跃响应输入的超调量
《自动控制原理》答案 李红星 第五章
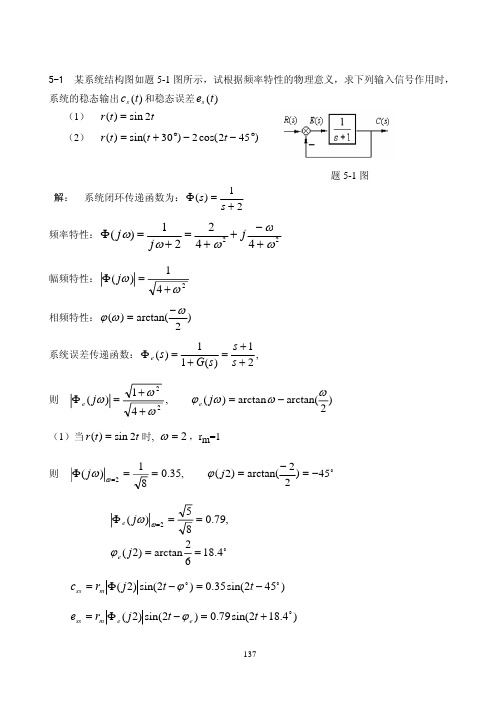
某系统结构图如题 5-1 图所示,试根据频率特性的物理意义,求下列输入信号作用时,
系统的稳态输出 c s (t ) 和稳态误差 e s (t ) (1) (2)
r (t ) = sin 2t r (t ) = sin(t + 30°) − 2 cos( 2t − 45°)
题 5-1 图
解:
系统闭环传递函数为: Φ ( s ) =
(T1 > 0, T2 > 0, T3 > 0, T4 > 0)
又知它们的奈奎斯特曲线如题 5-7 图(a)(b)(c)所示。 找出各个传递函数分别对应的奈奎斯 特曲线,并判断单位反馈下闭环系统的稳定性
145
题 5-7 图 解:三个传递函数对应的奈奎斯特曲线分别为 b, c, a 对 G1 ( s ) =
要求画出以下 4 种情况下的奈奎斯特曲线,并判断闭环系统的稳定性: a. T2 = 0 ;
141
b. 0 < T2 < T1 ; c. 0 < T2 = T1 ; d. 0 < T1 < T2 。 解: a. 当 T2 = 0 时, Q ( s ) =
K , s (T1 s + 1)
2
其开环幅相曲线如题 5-5 解图 a 所示, P = 0 ,N=2 则 Z=P+N=2,故在 s 平面右半平面有 2 个闭环极点,闭环系统不稳定; b.当 0 < T2 < T1 时, Q( jω ) =
当 τ > T 时,开环幅相曲线始终处于第三象限,如题 5-4 解图 a 所示; 当 T > τ 时,开环幅相曲线始终处于第二象限,如题 5-4 解图 b 所示。
题 5-4 解图 a 开环幅相曲线
自动控制原理课后习题答案第五章

第 五 章5-2 若系统单位阶跃响应为49()1 1.80.8tth t ee--=-+试确定系统的频率特性。
分析 先求出系统传递函数,用j ω替换s 即可得到频率特性。
解:从()h t 中可求得:(0)0,(0)0h h '==在零初始条件下,系统输出的拉普拉斯变换()H s 与系统输出的拉普拉斯变换()R s 之间的关系为()()()H s s R s =Φ⋅即()()()H s s R s Φ=其中()s Φ为系统的传递函数,又1 1.80.836()[()]49(4)(9)H s L h t s s s s s s ==-+=++++1()[()]R s L r t s ==则()36()()(4)(9)H s s R s s s Φ==++令s j ω=,则系统的频率特性为()36()()(4)(9)H j j R j j j ωωωωωΦ==++5-7 已知系统开环传递函数为)1s T (s )1s T (K )s (G 12++-=;(K、T1、T2>0)当取ω=1时, o180)j (G -=ω∠,|G(jω)|=0.5。
当输入为单位速度信号时,系统的稳态误差为0.1,试写出系统开环频率特性表达式G(jω)。
分析:根据系统幅频和相频特性的表达式,代入已知条件,即可确定相应参数。
解: 由题意知:()G j ω=21()90arctan arctan G j T T ωωω∠=---因为该系统为Ⅰ型系统,且输入为单位速度信号时,系统的稳态误差为0.1,即1()lim ()0.1ss s e E s K→∞===所以:10K =当1ω=时,(1)0.5G j ==21(1)90arctan arctan 180G j T T ∠=---=-由上两式可求得1220,0.05T T ==,因此10(0.051)()(201)j G j j j ωωωω-+=+5-14 已知下列系统开环传递函数(参数K 、T 、T i>0,i=1,2,…,6)(1))1s T )(1s T )(1s T (K)s (G 321+++=(2))1s T )(1s T (s K)s (G 21++=(3))1Ts (s K )s (G 2+=(4))1s T (s )1s T (K )s (G 221++=(5)3s K )s (G =(6)321s)1s T )(1s T (K )s (G ++=(7))1s T )(1s T )(1s T )(1s T (s )1s T )(1s T (K )s (G 432165++++++=(8)1Ts K)s (G -=(9)1Ts K )s (G +--=(10))1Ts (s K)s (G -=其系统开环幅相曲线分别如图5-6(1)~(10)所示,试根据奈氏判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其s 右半平面的闭环极点数。
自动控制原理_清华大学出版社课后习题答案

第一章习题答案1.自动控制:就是在人不直接参与的情况下,依靠外加装置或设备(称为控制装置或控制器),使机械、设备或生产过程(称为被控对象)的某个工作状态或参数(称为被控量)自动地按照预定的规律运行,或使某个被控制的参数按预定要求变化。
给定量:它是人们期望系统输出按照这种输入的要求而变化的控制量。
故一般又称给定输入或简称输入。
上例中的调节器的给定值u g 即是给定输入。
扰动量:它是一种人们所不希望的﹑影响系统输出使之偏离了给定作用的控制量。
上例中给水压力变化或蒸汽负荷变化都属于扰动。
开环控制:指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程,按这种方式组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的输入量产生影响。
闭环控制:按照偏差进行控制的,其特点是不论什么原因使被控量偏离期望而出现偏差时,必定会产生一个相应的控制作用去减小或消除这个偏差,使被控量与期望值趋于一致。
复合控制:将闭环控制系统和开环控制系统结合在一起构成的开环-闭环相结合的控制系统,称为复合控制恒值控制:给定量是一定的,控制任务是保持被控量为一不变常数,在发生扰动时尽快地使被控量恢复为给定值。
随动控制:给定量是按照事先不知道的时间函数变化的,要求输出跟随给定量变化。
2.7. 自动控制系统的性能的要求:稳定性、快速性、准确性。
自动控制系统的性能的最基本要求:稳定性第二章习题答案1. (a) 22()()1()()d y t f dy t k y t t dt m dt m m++=F (b )1211212()()()()k k k dy t y t t dt f k k k k +=++F (c )42422()2()()dy t k dy t kt dt m dt m+=F2. (a) 22211221122122112()d u du dvR C R C R C R C R C u R C vdt dt dt ++++=+(b )233112211221232()d u duR C R C R C R C R C u dt dt++++2112211222()d v dvR C R C R C R C vdt dt=+++(c )222220.25 1.5d u du dv u v dt dt dt++=+3. (a)2111212()(1)()c r U s R R C s U s R R CR R s+=++(b )222222()21()31c r U s C R s RCs U s C R s RCs ++=++(c )2211212()()()c r U s R U s R LCs L R R C s R R =++++4. (a)21212121221212212121()1()()()1f f f fs s k k k k Y s f f f f f X s s s k k k k k +++=++++(b )21212112221212112212()()1()()1c r U s R R C C s R C R C s U s R R C C s R C R C R C s +++=++++5. 0.085d d i u ∆=6. r d h Sh Q dt ∆+=∆7.2232(),()432t ts G s g t e e s s --+==-++8. 2()142tty t ee e--=-+9.(a )21()()c r U s RU s R =-(b )112212()(1)(1)()c r U s R C s R C s U s R C s ++=-(c )212()()(1)c r U s R U s R R Cs =-+10.(1) ;012180,3,211k k k π︒==-=-(2) 略;(3)系统的闭环传递函数22301230123()11()1c M t Mr M MQ s k k k k T Q s s s k k k k k k k k k k =+++11.闭环传递函数32()0.7(6)()(0.90.7)(1.180.42)0.68c r Q s s Q s s K s K s +=+++++12.闭环传递函数12342363451234712348()()1G G G G C s R s G G G G G G G G G G G G G G G G =+++-13.传递函数,21221)()(T s T s s K K s R s C +++=2121)1()()(T s T s T s s s N s C ++-+=14.传递函数。
《自动控制原理》课后习题答案(5章)
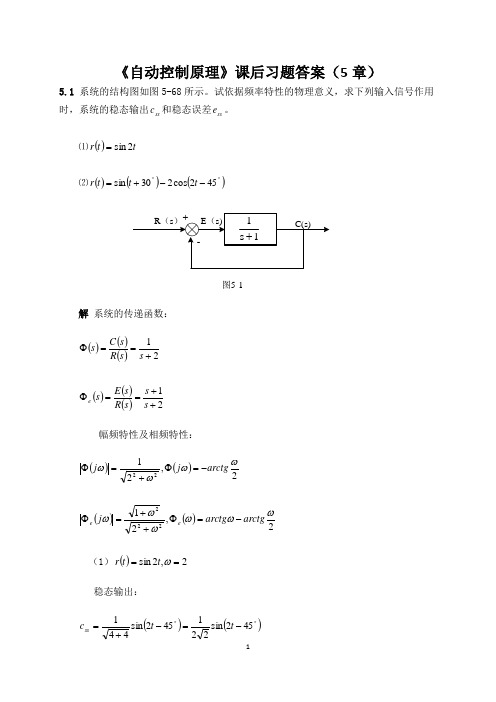
《自动控制原理》课后习题答案(5章)5.1 系统的结构图如图5-68所示。
试依据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出ss c 和稳态误差ss e 。
⑴()t t r 2sin =⑵()()()︒︒--+=452cos 230sin t t t r图5-1解 系统的传递函数:()()()21+==Φs s R s C s ()()()21++==Φs s s R s E s e 幅频特性及相频特性:()()2,2122ωωωωarctgj j -=Φ+=Φ()()2,21222ωωωωωωarctgarctg j e e -=Φ++=Φ(1)()2,2sin ==ωt t r 稳态输出:()()︒︒-=-+=452sin 221452sin 441t t c ss()︒-≈452sin 354.0t稳态误差:⎪⎭⎫ ⎝⎛-+++=2222sin 2221222arctg arctg t e ss()()︒︒+≈+=43.182sin 791.043.182sin 225t t(2)()()()()()︒︒︒︒+-+=--+=452sin 230sin 452cos 230sin t t t t t r⎪⎪⎭⎫ ⎝⎛+∠+++•-⎪⎪⎭⎫ ⎝⎛+∠+++=︒︒221452sin 221212130sin 211222j t j t c ss ()t t 2sin 225.3sin 55-+=︒ ()t t 2sin 708.05.3sin 447.0-+≈︒⎪⎭⎫ ⎝⎛-++++•-⎪⎭⎫ ⎝⎛-++++=︒︒222452sin 2221221130sin 12112222222arctg arctg t arctg arctg t e ss ()()︒︒︒︒︒︒-++•--++=4543.63452sin 410257.264530sin 510t t ()()︒︒+-+≈43.632sin 582.143.48sin 632.0t t ()()︒︒--+=57.1162sin 582.143.48sin 632.0t t5.2 若系统的单位阶跃响应:()t t e e t h 948.08.11--+-=()0≥t 试求系统的频率特性。
中文版教材习题五答案
z
*
30 199
30
(2)分离点为: d 0.4 ,分离角为: (2k 1)
l
2
起始角: p4 268 , p5 268
与虚轴的交点:
K1*
0 0
K2,3*
1.034 73.04
K4*,5165.553104
K(3s 1)
s(2s 1) K(3s 1)
闭环特征方程: 2s 2 (1 3K)s K 0
闭环特征根: s1,2 (1 3K)
(1 3K)2 8K (1 3K) 9K 2 2K 1
4
4
当
K=0
时,特征根
s1
0, s2
1 2
(1 3K ) (3K 1)2 8
(1)
G(s)
K s(s 1)2
(2)
G(s)
K(s s(s2 4s
4) 29)
(3) G(s)
K
s(s 2 4s 8)
试概略画出闭环系统根轨迹图。 5-4 参考答案:
(a) G(s)H (s) K s(s 1)2
(4) G(s) K (s 5)(s 4) s(s 1)(s 3)
-4 -3
Im
-1
0
Re 5
44
“自动控制原理”第五章习题参考答案
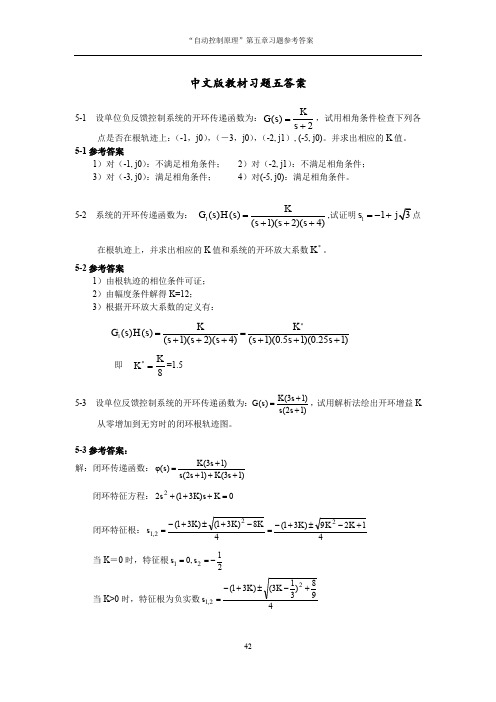
5-5
已知开环传递函数为 G(s)H (s)
K s(s 4)(s2 4s 20)
,请概略画出闭环系统根轨。
5-5 参考答案:
与虚轴交点:
K
第五章自动控制原理黄坚课后答案

5-1设单位负反馈系统的开环传递函数110)(+=s s G ,当把下列输入信号作用在闭环系统输入端时,试求系统的稳态输出。
(1))30sin()( +=t t r(2) )452cos(2)( -=t t r计算的最后结果:(1)) 83.24sin(905.0)(+=t t c ;(2)) 3.532cos(785.1)(-=t t c ;5-2设控制系统的开环传递函数如下,试绘制各系统的开环幅相频率特性曲线和开环对数频率特性曲线。
(1))15)(5(750)(++=s s s s G (2))1110)(1(200)(2++=s s s s G (3))18)(12(10)(++=s s s G (4))1008()1(1000)(2+++=s s s s s G (5))1(10)(-=s s s G (6)13110)(++=s s s G (7))15)(1.0()2.0(10)(2+++=s s s s s G (8)13110)(+-=s s s G 绘制各系统的开环幅相频率特性曲线:绘制各系统的开环对数频率特性曲线:5-3已知电路如图所示,设R 1=19k Ω,R 2=1 k Ω,C=10μF 。
试求该系统传递函数,并作出该系统的伯德图。
计算的最后结果:19.0,2.0)(,1)(1221112===+=+=c R T c R R T s T s T s G ; 5-4已知一些最小相位系统的对数幅频特性曲线如图所示,试写出它们的传递函数(并粗略地画出各传递函数所对应的对数相频特性曲线)。
计算的最后结果数字:(a) 11010)(+=s s G (b) 101)(s s G +=;(c) )1100)(101.0(100)(++=s s s s G ; (d) )1100)(110)(1(250)(+++=s s s s G ; (e) 3.0,3.50,]12)[(100)(2==++=ξωωξωn nn s s s s G 5-6画出下列给定传递函数的极坐标图。
自动控制原理第五章习题及答案

第五章习题与解答5-1 试求题5-1图(a)、(b)网络的频率特性。
u rR 1u cR 2CCR 2R 1u ru c(a) (b)题5-1图 R-C 网络解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sCR sC R R R s U s U r c ττ ωωτωωωωω11121212121)1()()()(jT j K C R R j R R C R R j R j U j U j G r c a ++=+++==(b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sC R s U s U r c )(1111)()(2122222212ττ ωωτωωωωω2221211)(11)()()(jT j C R R j C R j j U j U j G r c b ++=+++==5-2 某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(t c s 和稳态误差)(t e s (1) t t r 2sin )(=(2) )452cos(2)30sin()(︒--︒+=t t t r题5-2图 反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性: 2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时, 2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt()..=-+≥--11808049试求系统频率特性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理第五章课后习题答案(免费)
5-1设单位反馈系统的开环传递函数为
对系统进行串联校正,满足开环增益 及 解:
① 首先确定开环增益K,00
()12lim v s K SG S k →===
② 未校正系统开环传函为:012()(1)
G s s s =+
M a g n i t u d e (d B )
10
10101010P h a s e (d e g )Bode Diagram
Gm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)
Frequency (rad/sec)
③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=
④ 11sin ,31
m αϕαα--=∴=+ 0()(1)
K
G s s s =+40γ=︒112K s -=
⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=
⑥
0.128/,0.385/m T s T s ωα=⇒==∴=
校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++
校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==
++ 校正后1801374340γ=-=>,满足指标要求.
-100-50050100
M a g n i t u d e (d B )
10
1010101010P h a s e (d e g )Bode Diagram
Gm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)
Frequency (rad/sec)
5-2设单位反馈系统的开环传递函数为
要求 设计串联迟后校正装置。
解:
由题意,取5,v K K ==待校正系统的传函为:05()(1)(0.251)
G s s s s =
++ ① 绘制未校正系统的开环对数频率特性,得出:
M a g n i t u d e (d B )
10
10101010P h a s e (d e g )Bode Diagram
Gm = 0.0388 dB (at 2 rad/sec) , P m = 0.102 deg (at 2 rad/sec)
Frequency (rad/sec)
'
'0'
02/,180()0c c rad s G ωγω==-∠=,采用滞后校正装置.
② 选取''
()9,c ϕω=-而要求'''''
''''
41,()()50c c γγωγϕω=∴=-=
选取''0.6/,c rad s ω=于是可测得'''()15.8c L dB ω=
③ 由'''20lg (),0.1622c b L b ω=-⇒=,令''10.1102.754,16.67c T bT bT
ω=⇒=⇒= 0()(1)(0.251)
K
G s s s s =
++141,5, 1.02/b K s rad s γω-=︒≥=
④ 串联滞后校正装置的传函为:1116.67()11102.754bTs s G s Ts s ++=
=++ ⑤ 校正后系统的开环传函
为:05(16.671)()()()(1)(0.251)(102.7541)c s G s G s G s s s s s +==
+++ 校正后,1801364441γ=-=>,满足性能指标要求.
-150-100-50
050
100
M a g n i t u d e (d B )
10
101010101010P h a s e (d e g )Bode Diagram
Gm = 15.2 dB (at 1.94 rad/sec) , P m = 42.4 deg (at 0.666 rad/sec)
Frequency (rad/sec)
5-3、请分别写出超前校正网络和滞后校正网络的传递函数,画出的它们的Bode 图,写出最大超前相位角和滞后相位角的关系式。
解:
超前校正网络:1(),1
Ts G s αα+=
> ω 1arcsin 1
m αϕα-=+ 滞后校正网络: 1(),0
11bTs G s b Ts +=
<<+
1arcsin 1m b b ϕ-=+
5-4、写出PID 模型,给出四种改进PID 的方法,并指出他们的主要作用。
解:
PID 模型2()D P I K s K s K G s s ++=
(1) 积分分离的PID 算法
作用:防止系统启动,结束或大幅度增加减设值时,短时间内系统输出有很大的偏差,引起系统较大的超调和振荡.
(2) 抗积分饱和PID 控制算法
作用:避免控制量长期停留在饱和区.
(3) 不完全微分PID 控制算法
作用:在控制算法中加入低通滤波器,降低高频干扰,改善系统性能.
(4) 微分先行控制算法
作用:适用于给定值频繁升降的场合,可以避免给定值升降时引起系统振荡,从而改善系统的动态特性.。