双频测深仪dual-frequency
MK3双频测深仪操作手册

Teledyne Odom MKⅢ双频测深仪操作手册上海地海仪器有限公司二OO九年三月MKⅢ双频测深仪操作手册1.前面板1)打印纸2)打印纸控制ON/OFF——打开/关闭打印纸功能FEED——进纸TAKE-UP——收纸LIGHT——亮度调节3)模拟控制电源OFF——关机STBY(STANDBY)——待机,系统处于通电状态,可以调节参数,换能器不在发射状态。
当开机时,系统进行自检,显示软件版本信息。
ON——工作状态,测深和数据采集RX GAIN——接收增益TX POWER——发射功率4)LCD显示屏显示参数设置,水深值等信息。
5)键盘数字键方向键MARK——手动打标;恢复出厂值,按住MARK键,旋动电源按钮从OFF到STBY状态,即可恢复出厂值。
HELP——帮助信息,当选中某个参数时按下HELP键,打印纸会打印出相应参数的说明。
2.后部接口Serial 1——连接计算机,发送水深数据,接收打标命令,参数设置,固件升级等Serial 2——连接远程显示设备Serial 3——接收GPS数据,NMEA GLL或GGA语句Serial 4——接收姿态传感器数据(涌浪),TSS1格式GPS IN——接收GPS或差分信号,当MK3内置GPS模块时有用GPS OUT——GPS数据输出,当MK3内置GPS模块时有用VGA——连接显示器,当MK3内置LCD模块时有用LAN——以太网接口AUX——辅助接口,注记、触发信号输入或模拟信号输出TX1——高频或双频换能器接口TX2——低频换能器或第二个高频换能器接口F1/F2——保险丝DC——18-30V DCAC——100-230V AC,50-60Hz3.打印纸安装1)打开并移走图纸外面的玻璃门。
2)打开供纸的门。
3)将打印头的释放手柄旋向右边,使打印头和滚动轴分离。
4)拿出供应纸卷轴(Paper Supply Roll),装入热敏打印纸,将卷轴放入槽内(先将卷轴放进下面的槽内,再扳开上面的弹簧旋钮,将整个卷轴放进去)。
勘测公司常用设备精度表

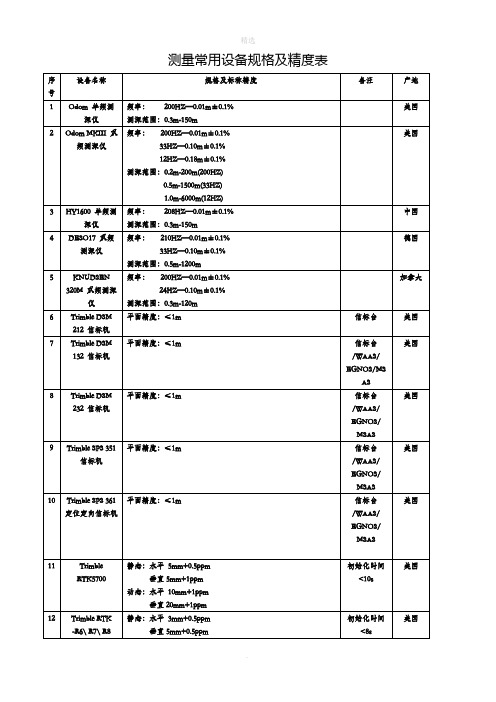
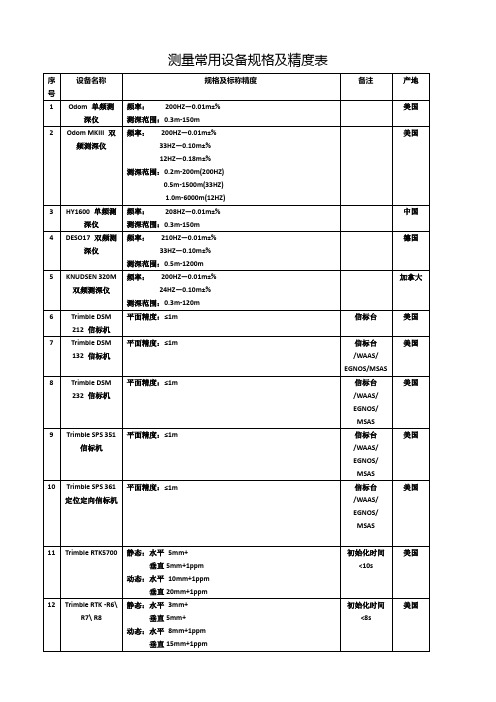
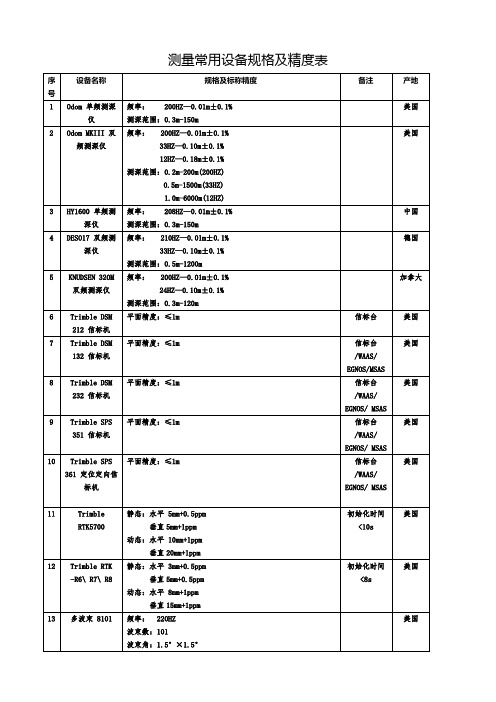
测量常用设备规格及精度表14 多波束812515 多波束2024 波束角:1.5 ° X 1.5 °覆盖宽度:最大:7.4 X水深实际:4X水深测深分辨率:1.25cm测深范围:3.5m-480m频率:455HZ波束数:240波束角:0.5 ° X 1°覆盖宽度:3.5 X水深测深分辨率:6mm测深范围:3.5m-120m 频率:200HZ--400HZ 可选美国美国16 多波束EM2040C17 旁扫声纳Klein3000 波束数:256波束角:0.5 ° X 1° (400HZ)1°X 2° (200HZ)覆盖宽度:10 ° X 160°可选测深分辨率:1.25mm测深范围:3.5m-500m・+ 4 ttfif ■ 1 »l|." *i4> 14-Kt?MHr*養焦did疋;水平:500F赫兹,21度100千赫兹,7度垂直:40度倾斜:向下倾余5 10, 15 20或25度,可调整预计声纳范围100千赫兹:50(米美国美国STEMA DENSITUNE 泥浆密度仪500千赫兹:150米剪应力强度范围:0—200Pa粘性范围:0 —600Pa・S密度范围:1000 —1800gr./ltr精度:小于所量的密度的1%分辨率:1 gr./ltr温度范围:0 - 60o C深度范围:0 - 250 m耐压深度:500m•■MMMUF仙(轨it w询tmt皈■■dXJLIK 孑盼jiXfl.i深度精度:小于所量深度的0.15%33 全站仪LeicaTS11瑞士。
双声道超声波流量计说明书

1管段式双声道超声波流量计1.1 ZK-JS100产品简介 ........................................................... 错误!未定义书签。
1.2 ZK-JS100参数 ................................................................... 错误!未定义书签。
2 ZK-JS100安装 ......................................................................................... 错误!未定义书签。
2.1 安装准备............................................................................. 错误!未定义书签。
2.2 接线说明............................................................................. 错误!未定义书签。
3 PT-SCAN软件操作 ................................................................................. 错误!未定义书签。
3.1 PT-SCAN 软件安装........................................................... 错误!未定义书签。
3.2 PT-SCAN 主功能菜单....................................................... 错误!未定义书签。
3.3 安装配置功能(SETUP)................................................. 错误!未定义书签。
SDE-28D双频测深仪操作手册

南方测深仪产品系列之S D E-28D双频测深仪操作与应用手册(第一版)广州南方卫星导航仪器有限公司2010年9月精选模板目录第一章原理介绍和参数说明 (1)§1.1 测深仪简介 (1)§1.2测深仪的基本原理 (2)§1.2.1水底信号识别技术 (3)§1.2.2水底门跟踪技术(时间门跟踪技术) (3)§1.2.3发射脉宽选择 (3)§1.2.4信号门限 (3)§1.2.5自动增益控制(AGC) (4)§1.2.6时间增益控制(TVG) (4)§1.2.7包络信号识别技术 (4)§1.2.8 DSP数字处理技术 (5)§1.3 测深仪的相关名词 (5)§1.3.1 水深数据分类 (5)§1.3.2 水深数据格式 (6)§1.3.3 测量周期 (7)§1.3.4 吃水设置 (8)§1.3.5 声速设置 (9)第二章SDE-28D的硬件介绍 (11)§2.1 技术特点与性能指标 (11)§2.2 SDE-28D主机介绍 (13)§2.2.1 SDE-28D面板说明 (13)§2.2.2 SDE-28D接口说明 (14)§2.2.3 SDE-28D附件说明 (16)§2.3 SDE-28D测量系统安装要点 (17)第三章SDE-28D操作软件介绍 (19)§3.1 SDE-28D操作软件界面 (19)3.2水深图像窗口和波形窗口 (20)3.2.1水深图像窗口 (20)3.2.2量程标尺 (20)3.3控制软件的主菜单 (22)3.3.1文件栏: (22)3.3.2设置栏: (23)精选模板3.3.3视图栏: (24)3.3.4帮助栏: (25)3.3.5快捷工具栏功能与说明: (27)3.3.6水深数据回放: (28)3.3.7回放状态的控制键界面: (30)3.3.8视图设置: (30)3.3.9测量参数设置 (31)3.3.10测深仪参数设置: (32)3.3.11测深仪档位设置 (35)3.3.12系统设置: (36)第四章SDE-28D实地操作步骤 (39)4.1.测深仪的现场安装: (39)4.2.水深测量系统的连接: (39)4.2.1与GPS设备的连接安装 (39)4.2.2连接安装的注意事项 (40)4.3.软件的操作: (41)4.3.1测量导航软件的主要操作要点 (41)4.3.1.1自由行测量软件中的主要设置: (41)4.4、测深仪的设置与操作: (46)4.4.1测深仪控制程序操作: (47)4.4.2 测深仪的测量功能选项 (48)4.5水深测量过程中应注意的事项: (50)第五章SDE-28D测量实例说明 (51)5.1快捷参数调节方式: (51)5.2测深仪需要调整和设置的参数有: (53)5.3 SDE-28D双频测深仪在疏浚工地中的测量记录图 (53)第六章SDE-28D 外业测量快速配置指南 (58)精选模板第一章原理介绍和参数说明§1.1 测深仪简介首先,感谢您选择了南方SDE-28D型全数字化双频测深仪。
海道测量仪器设备术语
海道测量仪器设备术语9. 1测量平台survey platform用于地形、海道或海洋测量,并配备测量设备的平台,如飞行器、船舶、深潜器等。
9.2测量船survey ship执行海洋、江河或湖泊等水域测量任务的船舶。
9.3测量船参考坐标系reference coordinate of survey ship以测量船上某点为中心建立的直角坐标系。
通常情况下,原点选择在船体重心或测深换能器中心的位宜,纵轴Y通过坐标系的原点,平行于测量船的赠腥线,船赭方向为正:横轴X通过坐标系的原点,垂宜于纵轴,船的右侧方向为正:垂直方向Z轴通过坐标系的原点, 方向向下为正。
注:修改JT/T 790-2010的定义3・8。
9.4测深杆sounding rod特制的标有刻度用于测量水深的杆状器具。
9.5水陀lead由刻度绳和形似秤碇重物组成的测深器具。
9.6检查板check board: check bar用具有刻度的绳索和金属板制作的求取回声测深仪改正数的器具。
9.7水尺tide staff测左水面涨落变化的标尺。
[GB/T 50228-2011,定义 4.11]声呐sonar利用声波信号探测水中或水底物体存在、运动方向、位置及性质的设备。
9.9回声测深仪echo sounder通过测圧声波或超声波信号从发射到海底反射回的时间间隔来确定水深的一种仪器。
9. 10多波朿测深系统multi-beam echosounder system利用条带回声测深方法进行海底测图的系统,可以同时获得与测量船航迹垂直方向上连续多个水深数据。
包括多波束测深仪、姿态传感器、罗经、声速剖而仪、左位仪、数据采集和处理单元等。
注:修改JT/T 790-2010的定义3. K9. 11双频测深仪dual-frequency sounder具有高低两种频率的水深测量仪器。
9. 12激光测深仪laser sounder应用激光技术设计的航空测深设备。
中海达测深仪操作手册
中海达测深仪操作手册目录第一章回声测深仪的工作原理 (3)一,回声测深仪原理 (3)二,水底信号识别技术 (4)1,水底门跟踪技术(也叫时间门跟踪技术) (4)2,脉宽选择 (4)3,浅水抑制 (4)4,自动增益控制及时间增益控制(TVG) (4)第二章HD-16型工程测深仪 (5)一,性能指标及特点 (5)二,配置 (6)三,连接和安装 (7)四,面板操作 (7)1,电源开关 (7)2,主信息画面 (7)3,修改吃水 (8)4,修改声速 (8)5,脉宽限制 (9)6,浅水抑制 (10)7,时间门比例 (10)8,发射功率调整 (11)9,增益控制 (12)五,监控软件操作 (13)1,监控 (13)2,固件升级 (14)第三章HD-17高级测深仪 (15)一,性能指标和特点 (15)二,配置 (16)三,安装连接 (17)四,主界面 (18)1,回声图像显示区 (18)2,档位刻度区 (19)3,回波波形显示 (19)4,水深显示窗口 (20)5,操作按钮区 (20)1中海达测深仪操作手册6,信息显示区 (20)五,参数及环境设置 (21)六,开始测深(或记录) (24)七,回放,查找和打印 (25)八,与测量软件的连接 (26)九,水深输出格式 (28)十,定标控制 (29)十一,软件和硬件升级: (29)1,软件升级 (30)2,固件升级 (30)十二,产品注册 (30)第四章HD-18双频测深仪 (31)一,性能指标和特点 (31)二,配置 (32)三,安装连接 (33)四,主界面 (34)1,回声图像显示区 (35)2,档位刻度区 (35)3,回波波形显示 (35)4,水深显示窗口 (36)5,操作按钮区 (36)6,信息显示区 (37)五,参数及环境设置 (37)六,开始测深(或记录) (41)七,回放,查找和打印 (42)八,与测量软件的连接 (42)九,水深输出格式 (46)十,定标控制 (47)十一,软件和硬件升级: (48)1,软件升级 (48)2,固件升级 (48)十二,产品注册 (49)2中海达测深仪操作手册第一章回声测深仪的工作原理海洋声学仪器发展迄今为止,出现突飞猛进的技术飞跃,国际上推出许多先进的海洋声学设备,如:多波速海底成像系统,侧扫声纳,浅层剖面仪,水下声标应答器等等,而测深仪只是声学仪器家族中最常用的一种设备.目前国际上大多型号的测深仪还是采用机械记录针式或热敏记录方式.丹麦的E-sea sound率先采用了数字成像测深仪,但价格昂贵(每台售价在30万人民币以上),而且只能存储30分钟的图像数据.国内目前使用最多的测深仪还是机械记录针式的,体积大,功耗大, 故障率高.中海达公司经过多年的研究,率先推出HD-17/HD-18型数字成像式测深仪,把打在记录纸上的模拟信号,用数字化图像的方法显示出来,并可以存贮,事后可随时回放和打印,用先进数字处理的方法捕捉水底回波信号,既精度高,又稳定可靠,用电子闪存,可存储20-60小时的记录图像数据,还配有USB存储盘,随时可将数据导出.中海达公司同时还推出了HD-16型轻巧工程测深仪,应该是目前最轻巧的测量型测深仪.虽然它只显示和输出水深无图像记录,但所得到的水深也是经过复杂的数字处理的,精度高而又可靠.中海达测深仪是目前国内商品化测深仪中最先进的测深仪.一,回声测深仪原理如图1-1,假设声波在水中的传播水面速度为V,当在换能器探头加窄脉冲声波信号,声波经探头发射到水底,并由水底反射回到探头被接收,测得声波信号往返行程所经历的时间为t,则: Z = Vt/2图1-1 回声测深仪原理图1-2 水底门跟踪技术Z就是从探头到水底的深度,再加上探头吃水就是水深了.3中海达测深仪操作手册二,水底信号识别技术虽然回深测深的原理很简单,但水中的情况却是很复杂的,有干扰回波,有鱼群出没或杂物的回波,水底的反射条件各不相同,在浅水区还有可能出现二次, 三次回波,如何从众多的杂波中跟踪得到真正的水底回波信号,需要采用相关的技术.1,水底门跟踪技术(也叫时间门跟踪技术)如图1-2,由于水底的变化是比较平缓的,两次测深之间(约0.1秒),水深变化不会太大,我们假定二次深度的变化量为±10%,则我们就在上次正确回波时刻前10%×Z到后10%×Z开一道时间门,只有在时间门内的回波我们才认为是正确的回波,这±10%就叫时间门宽度,一旦时间门内没有回波,就进行全程搜索回波,直到重新捕获真正的回波.2,脉宽选择对回波的脉冲宽度加以限制,对于脉宽小于限值的回波脉冲,则认为是干扰信号,不同的反射底质所形成的脉宽都是不一样的,脉宽设置过大,会造成没有可用的回波,所以脉宽限制不宜设置过大.3,浅水抑制如果你所测的区域的水深一定比某个值大,如一定大于5米,则可加入5米的浅水抑制,则5米以内的回波不予采用.4,自动增益控制及时间增益控制(TVG)自动增益控制技术可以根据测量回波脉冲的峰值来确定回波信号的强度,回波信号过强时自动控制接收放大电路降低增益,以防止干扰信号过多.当回波信号幅度过小时,自动控制接收放大电路提高增益,以接收回波.声波在水中传播按指数规律衰减,为保持信号幅度的平稳,TVG将控制接收放大器按相反的规律增长放大倍数,这就是时间增益控制.4中海达测深仪操作手册第二章HD-16型工程测深仪一,性能指标及特点电源接口数据接口探头接口图2-1测深仪主机/面板图性能指标:1. 工作频率:200KHz2. 发射功率:80W3. 测深范围:0.3m~120m4. 测深精度:±2cm+0.1%5. 吃水调整范围:0.0m~9.0m6. 声速调整范围:1300~1700m/s7. 显示:16×2 LCD带背光液晶显示屏8. 面板操作:4按键,菜单操作,自动背光显示9. 串口数据输出,9600波特率10. 供电电源:12V电池供电,功耗4W,电量显示,欠压自动关机5中海达测深仪操作手册11. 环境:工作温度-30℃~70℃,防水12. 尺寸:12×5×20cm 重量:0.5kg特点:1. 高速微处理器全数字化处理,数字化采样速率达153600次/秒2. 自动增益控制3. 水底门跟踪和脉宽选择技术的完美结合4. 全自动换档,无需人工干预5. 轻巧,稳定,可靠6. 在线机内固件程序升级,永远保持性能最先进二,配置名称型号数量说明主机HD-16 1换能器SD-200 1 发射超声波探头串口通讯电缆GC-1 1 连接测深仪和电脑进行数据采集手把电池BC-4 1 供电电池充电器WC-1 1 电池智能充电器塑料箱BG-1 1 携带箱不锈钢杆TD-16 1 换能器固定杆固定夹TP-16 1 换能器固定夹6中海达测深仪操作手册三,连接和安装测深仪主机超声波探头电池电脑采集数据及控制图2-2连接安装图四,面板操作1,电源开关按一下电源键电源就自动打开,经开启画面后进入主信息画面,如下图,按住并保持2秒中,电源自动关闭.2,主信息画面水深信号强度增益上翻页确定/修改键电量指示吃水声速下翻页电源开关/取消键图2-3主界面7中海达测深仪操作手册3,修改吃水主界面中按"▲"一次进入吃水修改,如下图:图2-4探头吃水如要修改按键,,按"+""-"对应键,吃水可在0.0~9.9米范围调整. Enter图2-5修改吃水4,修改声速主界面中按"▲"二次进入声速修改,如下图:图2-6声速显示8中海达测深仪操作手册同样,如果要修改按键,按"+,-"键修改,声速的调整范围为1300~1700米/秒.Enter图2-7修改声速5,脉宽限制主界面中按"▲"三次或按"▼"五次进入脉宽限制修改,脉宽的调整范围为2~16㎝,为OFF时即关闭了脉宽限制.图2-8脉宽限制图2-9修改脉宽9中海达测深仪操作手册图2-10脉宽限制关闭6,浅水抑制主界面中按"▲"四次或按"▼"四次进入浅水抑制修改,浅水抑制可在0~25米范围内修改.图2-11浅水抑制图2-12修改浅水抑制7,时间门比例主界面中按"▲"五次或按"▼"三次进入时间门调整,时间门比例可在10%~10中海达测深仪操作手册50%范围内调整,为OFF时即关闭了时间门控制.图2-13时间门比例图2-14修改时间门比例图2-15关闭时间门比例8,发射功率调整主界面中按"▼"二次进入发射功率调整,发射功率可设为高(High),低(Low)和自动(AUTO)档,在自动档时,当水深上升大于15米时,自动变为高档,当水深下降小于10米时,自动变为低档.11中海达测深仪操作手册图2-16发射功率调整(高档)图2-17发射功率调整(低档)图2-18发射功率调整(自动选择)9,增益控制主界面中按"▼"一次进入增益控制调整,增益在AUTO,2,3 (15)间调整,15时为增益最大,2时为增益最小,AUTO为自动增益控制.12中海达测深仪操作手册图2-19增益控制(自动选择)图2-20调整增益控制五,监控软件操作随机光盘中有HD-16监控软件,运行SETUP.EXE安装软件到你的PC机(windows9x,2000,XP,NT操作系统).该软件可以监控测深仪的水深,各项参数,也可以修改设置各项参数,同时具备测深仪固件升级功能,当厂家对测深仪有新的修改时,你可以从我公司网站下载文件,对机器进行在线升级,保持你的机器性能最新.1,监控运行HD-16监控软件,出现如图2-20画面,选择你的COM端口号,软件自动显示现机内各项设置参数,水深窗口显示实时水深,你可以对各项参数进行修改, 然后执行菜单的"更新参数",便把新的设置参数输入到机内非易失存贮器中.13中海达测深仪操作手册图2-21 监控软件2,固件升级固件更新可上公司网站 下载,执行菜单"功能"的"固件升级"出现如图2-22所示画面: 图2-22 固件升级单击"浏览"钮,选择你下载的映象文件:HD16.040.htb,单击"开始升级",提示你"关闭接收机再开机",重新开机后,开始升级过程,主机显示"UPDATING…",直到升级完成,拔掉主机电源,重新开机,你的主机已运行了新的硬件.14第三章HD-17高级测深仪一,性能指标和特点图3-1 HD-17测深仪外形性能指标:高频工作频率:200KHz高频发射功率:200W测深范围:0.3m~300m测深精度:±2cm+0.1%吃水调整范围:0.0m~9.0m声速调整范围:1300~1700m/s串口数据输出,多种格式,波特率可调15中海达测深仪操作手册高亮度12寸液晶显示屏,分辨率800×600电阻式触摸屏外接端口:鼠标,键盘,打印口,RS-232串口,USB口内置大容量电子存贮器供电电源:直流12V或交流200 V / 110 V,功耗20W环境:工作温度-20℃~70℃,防水尺寸:34×30×20cm 重量:8 kg特点:高速A/D转换,采样速率153600次/秒,瀑布式显示数字化图像处理技术,瀑布式图像显示及记录,并可回放及打印自动增益控制及时间增益控制(TVG)水底门跟踪技术和脉宽选择技术的完美结合Windows操作界面,方便直观电阻式触摸屏,用手指即可操作二,配置名称型号数量说明主机HD-17 1高频换能器DS-200 1 200KHz固定杆TD-16 1 三段分节固定夹TP-16 1直流电源线PW-5 1 直流电源线交流电源线PW-6 1 交流电源线手动打标线MK-2 1 用于手动按钮打标外接键盘不定 1外接鼠标不定 1数据电缆RS-9 1 连接到定位设备U盘不定1 存取数据用连续纸打印机不定1 选件铝合金箱LH-17 1 主机携带箱16三,安装连接12V电源高频换能器测深仪主机图3-2 测深仪连接图测深仪背部连接端口说明:图3-3连接端口触摸屏的操作要领:尽量使用不带指甲的手指进行触摸,谨防刮伤触摸屏造成阻值异常导致无法正常操作.17中海达测深仪操作手册四,主界面连接安装完毕后,连接上电源(直流或交流都可),打开主机背面的开关,系统开始启动,启动完毕后便自动进入测深软件界面,如图3-4:操作按钮区档位刻度区回声图像显示区信息显示区图3-4 测深软件主界面图3-4中各部分说明如下:1,回声图像显示区瀑布式显示回声图像从上到下信号线分别为:零米线,发射线(即吃水线),回波线.定标时显示一条打标线及打印注记内容,由外部命令控制打标时,注记内容由外部软件提供,其他打标方式时,只打印连续点号和定标时间.18中海达测深仪操作手册2,档位刻度区显示对应档位的深度刻度,档位分为下列几档:1档0~10米2档0~20米3档0~40米4档0~80米5档0~160米6档0~320米当设置为"自动换档"时,当水深大于现档位的90%时,自动扩大到下一档位,当水深小于现档位的30%时,自动缩小到上一档位.当关闭"自动换档"时,如果回波超出显示范围,也不会造成信号丢失,只是看不到显示罢了.3,回波波形显示瀑布式回声图像显示区可以转换为回波波形显示,就像示波器一样,可以很清楚地看到从发射到接受的波形,以波形方式显示时,不会影响正常的测深和记录. 点击窗口左边的小按钮可以在"瀑布"方式和"波形"方式来回转换.波形方式显示从发射到接受整个过程的波形.波形幅度的大小代表了回波信号的强弱.红色方形波表示被跟踪的水底回波.如图3-5.图3-5 回波图形窗口19中海达测深仪操作手册4,水深显示窗口显示对应通道被捕捉的水深,当跟踪失败时,显示的水深后面有个" "号,当浅水报警打开时,一旦水深小于报警值,水深窗口显示"警告".5,操作按钮区所有操作功能的按钮及进展条.如图3-6.图3-6 操作按钮扩大量程:手动扩大显示测深范围;缩小量程:手动缩小显示测深范围;设置:设置测深要素;环境:修改工作方式,端口输出格式等;测深:开始测深,但不记录;记录:开始测深,并记录;回放:回放曾经记录的测深文件,犹如查看记录纸;打印:把曾经记录的测深文件打印到外接打印机的连续纸上;停止:停止测深,并停止声波发射,不工作时可以省电;关闭:关闭测深软件,回到系统桌面;定标:手动定标(在手动定标方式时才有效).6,信息显示区显示当前的吃水,声速,增益,发射功率,电池电压及高压,旁边滚动条用于手动调整增益,当增益为自动方式时,你的调整将受到自动控制的约束.发射功率后面的按钮用来改变功率档位,可以在"自动""高""低"之间切换.当电池电压小于11V时,出现欠压警告,你需要考虑更换电池或对电池进行充电了.高压是由主机内自动产生的,正确的高压应为48V±1V.如图3-7可用内存显示当前还能记录数据的空间,当空间小于50M时会自动报警,此时需将已测量的数据传出并删除,留出空间记录新的采集数据.20中海达测深仪操作手册图3-7 信息显示区五,参数及环境设置按"设置"按钮出现修改参数设置对话框,如图3-8:各项参数的说明请详见第一章有关说明;1, 吃水:0~9.9米2, 声速:1300 ~1700米/秒3, 底面类型选择用来控制脉宽限制,软底的回波脉宽长,硬底的脉宽窄,选"忽略"时,即关闭了脉宽限制.4, 浅水抑制:0~25米5, 坡度选择用来控制时间门:普通坡度的时间门宽度为15%;陡坡的时间门宽度为30%;选择"峭壁"时关闭时间门跟踪;6, 发射功率:自动,高,低自动,高,低档,自动档时:当水深上升超过一定值时,转为高档,当水深下降低于某值时,转为低档.图3-8 参数设置21中海达测深仪操作手册7, 增益控制:10%~100%人工增益设置,设为"自动"时,系统将根据回波信号强度自动调整增益.8, 信号门槛:抑制小幅度干扰信号的门槛值,例如:选择30%时,信号幅度低于30%时,将作为0信号幅度处理.9, 时间增益(TVG):声波在水中传播按指数规律衰减,TVG将控制接受放大器按相反的规律增长,保持信号幅度的平稳.如果你不知道如何去设置这些参数,你可以按"恢复默认值"钮,把所有参数都恢复到默认值,不过吃水还是要根据探头的入水深度由你设置.按"环境"按钮出现如图3-9所示对话框:图3-9 环境设置水深输出端口:HD-17可以仿真世界上各类测深的数据格式,根据你定位系统的需要,你选择水深输出的波特率和数据格式,各种数据格式的说明请参见后面的章节,一般可选用Haida-H格式.定标方式:有四种定标方式可供选择,详细说明请参见后面的章节.自动换档:激活自动换当时,软件会根据水深值自动进行换档,当水深值大于本档位的90% 时——升档,当水深值小于本档位的30%时——降档.非自动换档时,要人工按"扩大量程"和"缩小量程"进行换档.浅水报警:激活浅水报警时,你可以输入水深限值,当水深小于这个限值时,水深窗会显22中海达测深仪操作手册示"警告".打印机设置:用于设置连续打印时的相关参数.图3-10 打印机设置其中:色彩可设置为彩色或黑白输出,定标点水深或深度刻度线可选择打印,刻度的粗细选择可方便查找纸上的水深数据,长度方向的缩放可以控制打印的比例. 端口配置:用于设定内部工作端口(如图3-11),一般由厂家设定,建议你不要随意修改它.图3-11 端口配置在HD-17测深仪做为水深采集输出装置时,水深输出端口一定要设为COM4,当测深仪需要安装测量软件,且需要同时进行连接GPS装置和测深仪进行水深测量和定位记录时,需要将水深输出端口改成COM6,再将海洋测量软件的定位端口设为COM4,测深仪端口设为COM6,将测深仪软件和海洋测量软件同时运23中海达测深仪操作手册行,即可进行测量.固件升级:用于对各测深通道的固件芯片内的工作程序进行在线升级,这是中海达产品为用户着想的一大最新科技,使你的产品永远保持性能最优.请留意我公司网站的升级公告,自行下载升级文件进行升级.单击主界面上的服务按钮,如图3-12,即可进行固件升级.固件的升级文件为:HD17.40.HTB,需选择高频通道进行升级.产品注册:如果你已购得产品的永久使用权,请向产品供应商索取注册码,对产品进行永久注册.注册方法是:点击进入"服务",在下方注册码框中输入注册码即可.图3-12 固件升级服务六,开始测深(或记录)按"测深"时,系统开始发射和接收,并显示回声图像,水深输出口也有相应格式的水深输出,只测深时不进行图像记录.如果你不需要图像记录的话,这倒是个节省内存空间的好方法,因为进行图像记录每小时要用去6M左右的内存.如果你是正式的成果测量,那么就用"记录"钮,进入"记录"时会出现一个文件对话框要求你输入一个记录文件名,系统会自动根据日期,生成一个不重复的文件名, 你只需要点击确定就可以了.如果你一定要自己输入文件名,你可以打开中文输入, 24中海达测深仪操作手册并启动软键盘,也可以接上外接键盘输入.如果你输入的文件名已存在,会提示你是否"覆盖",如选择"是",你以前的原始文件就被覆盖了.建议你每个文件记录时间不要太长,一个小时左右就够了,太大的文件无论是拷贝还是打印都将会出现"磁盘满"或"缺纸"等困惑.注意:经常留意你的存储空间是否足够,最好每天工作完以后,用USB存储盘把记录文件(*.hds)转移到别的电脑或刻录光盘永久保留,文件转移后记得把测深仪内的文件(*.hds)删除,腾出足够的空间.在测深时,如果有多次回波或有干扰波,系统能自动识别正确的回波,万一跟踪到别的干扰波上去了,可以在瀑布窗口或波形窗口的正确回波左边的空白处点击一下就恢复了.七,回放,查找和打印存贮的测深文件(*.hds)你可以随时调看,也叫回放,你所看到的回放内容和当时测深是一样的,所以你存贮的文件也可以说是"数字记录纸",这也是我们不考虑在测量时实时打印的原因,数字化时代了,为什么还要去保管一堆堆记录纸呢如果要上交资料的话,上交一张光盘不是很方便吗你将测深软件(有配备光盘)安装到任意电脑上都可以查看你的"数字记录纸".回放时,软件会弹出对话框,选择你需要回放的文件,软件会按正常回放速度放映,如果你要加快,可以点击"快放"钮,还可以用"快倒","暂停",也可以按打标的点号查询,直接跳到你要放的位置.查询点号直接跳转图3-13 跳转点号显示水深如果你确实要记录纸的话,建议你配上连续纸打印机,用"打印"钮可以打印出像记录纸一样的硬拷贝资料.25中海达测深仪操作手册八,与测量软件的连接由于本身测深仪是内置一个windows98操作系统的电脑,内部存在6个串口,分别是如下图示(3-14)进行配置的图3-14 内部连接示意图说明:主板中的前三个串口已被设备使用,所以无法作为GPS或者水深输入输出串口进行使用,串口5和6已被直接连通,所以正确的使用方法是:当HD-17作为一般测深仪使用的时候,串口4作为水深输出串口,相当与一般的测深仪.当HD-17连接上GPS作为电脑,GPS,测深仪一体化测量设备的时候,需要同时打开测深仪软件及海洋测量软件,将水深输出改到串口6进行输出,同时海洋测量软件将串口4作为接GPS的数据入口,串口5作为测深仪接口,测深仪数据格式设为Haida_H,HD17打开单频测深仪,即可进行测量,(将COM5与COM6调换也可).若需要在回声显示窗口中显示水深波形的点号,时间或水深,则须在测深仪上的"环境参数设置中"将"定标方式"的软件定标改成接受"字符串"命令,勾选"打印点号",如图3-15,再在测量软件中的"测深仪设置"中的"定标设置"中的输出命令改成以字符串方式的"$MARK,*",或者在ASCII码方式下输入"36 77 65 82 75 44 42 13"(其中13表明即回车符,必须在二进制方式下加),如图3-16.这样在以后的测量中将在水深波形显示窗口中出现带上述参数的定标线,如图3-17.测深仪的定标设置的其他参数如硬件定标,一般放在默认值"无"即可,除非接某些进口GPS仪器,需要设置为RTS,其他情况下不需要进行设置.26中海达测深仪操作手册图3-15 定标方式改成接受串口定标图3-16 定标设置定标信息图3-17回声窗口出现带参数的定标线测深仪配置中的Haida_H数据格式详细信息应设为如图3-18所示,并要在"端口工作方式"中选择单频测深仪如图3-18:27中海达测深仪操作手册图3-18 Haida_H格式详细资料图3-19工作方式注意:若用户的海洋测量软件的测深仪配置中没有该格式,则可人为设定,但要在设置好上述参数之后单击详细资料上方的"添加"按钮,以添加以该名称命名的格式,再在格式选择框中选中该格式即可.九,水深输出格式1,HaiDa-H(高频输出)和HaiDa-L格式(低频输出):DTE#####DT为设别头第3位,当水深错误时为E,正确时为空格第4~8位为水深值,单位为㎝.回车换行2, DESO 25格式高频通道:DA#####.##m低频通道:DB#####.##mD为识别头A表示高频通道B表示低频通道#####.##为水深,单位为米代表一位空格m代表单位为米3, INNERSPACE格式#####为识别头,十六进制数02Hex28中海达测深仪操作手册2-6为水深,单位为cm4,NMEA 173 DBS格式SDDBS,####.#,f,####.#,M,###.#,F呎米5,ODOM DSF et格式高频通道:et#####H低频通道:et#####Let为识别头H表示高频通道L表示低频通道#####为水深,单位为cm十,定标控制操作:在"环境设置"的界面左下方可以设置定标方式1,接受串口命令:由海洋测量软件控制打标,在测深仪设置中的定标设置命令为:$MARK,*必需选择字符串的形式.在ASCII码方式下命令为:36 77 65 82 75 44 42 13其中13代表,即回车,只能在ASCII码方式下添加2,外接打标:把仪器配备的打标电缆插到串口上,每按一下电缆另一头的按钮,会打标一下, 点号自动累加.3,手动打标按一下屏幕的"定标"钮,会打标一下,点号自动累加.4,自动定时:根据你设定的时间间隔(秒),自动定时打标,点号自动累加.注意:不管使用何种打标方式,必须在"环境"中设置对应的打标方式才会起作用.。
测深仪
美国ODOM CV系列多频测深仪
ChartView图显程序可以在三频测深仪或PC机上使用,实时或后处理显示出来自探头高、低频的信号数字化
後的水深、浅层图像以及来自船左右两旁扫探头回波的图像,还可以直接传输到其它PC机上回放数椐。
■旁侧声纳扫描系统(测深仪选件)
通常旁侧声纳系统的成果只是水底地貌的平面图,没有正确的座标和水深。
如果,采用了CX3三通道探头,那么既可扫描水底地貌,又有了水深深度以及当地座标。
■浅地层剖面声纳(测深仪选件)
CVx系列产品可以通过安装高能发射/接收板和高能低频探头,在测深的同时获得海底浅地层剖面。
主要性能指标:
●频率(按每档1kHz手调,以配合探头性能)
高频:100 kHz-1 Mhz低频:10 kHz-50 kHz3-5 kHz 高能发射器(选件)
●精度:200 kHz时为0.01 m +/-0.1% 水深l 33 kHz时为0.1 m +/-0.1% 水深12 kHz时为0.18 m +/-0.1% 水深
●测深范围
200 kHz为0.2-200 m33 kHz为0.5-1500 m 12 kHz为1.0-6000 m
●接口:4个RS232和1个串口,可选波特率4800-19200
选件:热敏打印机、LCD彩色液晶显示器、旁扫声纳、浅地层剖面系统、检测工具。
常用测量仪器设备精度表
22
涌浪补偿器 三维 Seatex MRU-H
摇摆和颠簸输出
角度范围:45°
角度精度:±100°/s
静态精度:0.1°RMS
动态精度:0.15°RMS
涌浪输出
输出范围:50米,可调
时段:0至25秒
动态精度:5厘米或5%,以最大的准
加速度输出
加速度范围:±40米/平方秒
加速度燥声:0.01米/平方秒
挪威
23
涌浪补偿器 单维 TSS DMS-H
精度:5cm或5%取大值
最大量程:±99m
分辨率:1cm(数字)
带 宽 0.05 to > 10 Hz
加速度范围(垂直):±2g
噪声:<2cmRMS
温度范围:工作0°to55°,存贮-20°to70°C
震动:峰值30g,40ms半正弦
横向加速度 :峰值500mg,0.1s 正弦
15
多波束 2024
频率:200HZ--400HZ 可选
波束数:256
波束角:0.5°×1°(400HZ)
1°×2°(200HZ)
覆盖宽度: 10°×160°可选
测深分辨率:1.25mm
测深范围:3.5m-500m
美国
16
旁扫声纳Klein 3000
水平:500千赫兹,21度
100千赫兹,7度
垂直:40度
0.5m-1500m(33HZ)
1.0m-6000m(12HZ)
美国
3
HY1600 单频测深仪
频率:208HZ—0.01m±0.1%
测深范围:0.3m-150m
中国
4
DESO17 双频测深仪
频率:210HZ—0.01m±0.1%
测深仪和涌浪仪设置

测深仪设置公司现有三套测深仪另加两套涌浪仪,由于使用者越来越多,仪器里面的一些关键设置一旦被修改,有可能影响作业。
本次针对常见问题,主要列出了两套双频测深仪及涌浪仪的具体设置,详见如下:一、德国HydroStar 4300型双频测深仪1、海洋导航软件6.0版本测深仪设置:名称:DESO-25D 字符串识别头:D 错误字符:位标志识别尾:13 水深乘数:1起始位:3 错误位:1水深位数:8 错误与码:02、多通道数据:第二频起始位:3 一频识别符:A第二频位数:8 二频识别符:B3、涌浪仪数据格式(连接涌浪仪时,在“设置船形指示”中选中“涌浪滤波改正”):识别头:: 结尾:13起始位:9 长度:5乘数:0.014、测深仪内部数据格式输出设置(与DESO-25D对应,警告:对本仪器不熟悉的人员勿随意操作):Service(系统设置):(1)Channel 1:Draft(吃水):按实际记录值Trim(换能器至船底龙骨距离):0.00Blocking Depth(盲区水深):0.00Frequency(频率):200Location:Bow(船尾)(2)Channel 2:Draft(吃水):按实际记录值Trim(换能器至船底龙骨距离):0.00Blocking Depth(盲区水深):0.00Frequency(频率):30Location:Bow(船尾)(3)SIO 0(NMEA):Mode:8N1Baud:9600Protocol:DESO 25Rep.Rate:FastPass Through:ON(4)SIO 1(HEA VE):Mode:8N1Baud:9600Protocol:TSS1二、美国Bathy 500DF型双频测深仪1、海洋导航软件6.0版本测深仪设置:名称:Bathy 500DF 字符串识别头:空格错误字符:位标志识别尾:13 水深乘数:1起始位:7 错误位:6水深位数:5 错误与码:02、多通道数据:第二频起始位:7 一频识别符:et H第二频位数:5 二频识别符:et L3、涌浪仪数据格式(连接涌浪仪时,在“设置船形指示”中选中“涌浪滤波改正”):识别头:: 结尾:13起始位:9 长度:5乘数:0.01。
常用测量仪器设备精度表
25
电子水准仪Leica DNA03
电子测量 -铟钢尺:0.3mm/km标准水准尺:1.0mm/km光学测量:2.0mm测距精度(电子):1cm/20m(500ppm)
测程 -电子测量:1.8m-110m光学测量:0.6m以上
电子测量 -最小读数:0.01mm,0.0001ft,单次测量时间 一般3s望远镜放大倍率 24x
标准模式 1mm+ ×10-6D / 一般为 s
快速模式 3mm + ×10-6D / 一般为 s
跟踪模式 3mm+ ×10-6D / 一般< s
瑞士
27
全站仪 Leica TCA2002
角度测量--
精度:〞(Hz,V)
补偿器:〞(设置精度)
4′ (补偿范围)
距离测量—
测程:2500m(圆棱镜)
1300m (360°棱镜)
倾斜角度:操作时:+/- 30°
英国
24
水准仪Leica NA2
往返测高程精度 :
0.7mm /km
0.3mm/km (带测微计)
放大倍率 :标准32x,FOK73 目镜(可选) 40x,FOK117 目镜(可选) 25x
补偿器设置精度: ''补偿器工作范围 :±30’
工作温度 :-20℃到 +50℃贮藏温度 :-40℃到 +70℃
18
浅地层剖面系统
Chirp III
频率:低频2-7kHz,高频10-20kHz;
发射速率:最大15 次/秒;
脉冲长度:5 ms-60 ms,可选;
输出能量:每个通道,最大为4KW;
穿透深度(参考):泥沙中最大100米;
分辨率:高频7.5cm;
ODOM 双频测深仪操作说明解读
ODOM ECHOTRAC CVM双频测深仪基本操作与使用方法中国石油天然气管道工程有限公司2012年 06 月目录1仪器简介 (1)2 准备工作 (2)3 仪器安装及通信连接 (3)3.1换能器的安装 (3)3.2线缆连接 (3)3.3查看COM口号 (4)3.4 GPS通信设置 (4)4 Echart测深软件设置 (5)5 Hynav导航软件设置 (9)6 野外测量作业流程 (12)7 水深资料后处理 (13)1仪器简介Odom公司最近推出的Echotrac CVM。
它便携式防水的收发机,可灵活调频,标准的串口可采集数据连接动态传感器及GPS接收机亦包含Ethernet LAN界面。
箱式电机适用于单频及双频测深,它还可连接Odom 的旁扫传感器。
箱式主机:主机界面:换能器:2 准备工作1)软件安装找一台笔记本(最好固定下来),安装上如下软件:●GPS Configurator软件(GPS参数设置软件);●Echart软件(测深仪控制软件);●HyNav海洋测量(施工定位)软件(GPS导航软件)●COM-USB线缆驱动(测深仪主机和GPS都需要通过此线缆和笔记本连接)2)新建任务打开导航软件(HyNav)----文件----新建任务紧接着弹出设置坐标系统的窗口,如下图:3 仪器安装及通信连接 3.1换能器的安装具体参照“测深仪操作指导书(J09-KC-04-B )”第3.1节。
3.2线缆连接换能器线缆接主机上的“TRANSDUCER ”口;●主机24V直流电接口为“24 VDC”,220V交流电接口为“115/230 VAC (60/50 HZ)”;根据电源情况选择正确的接口;●网线一端接主机“LAN”口,一端接笔记本;●一根COM-USB数据线COM口接“DEPTH I/O”口,USB口接笔记本,用来传输测深数据;●另一根COM-USB数据线COM口接GPS接收机COM2口,USB口接笔记本,用来传输GPS定位数据。
测量常用设备规格及精度表
垂直5mm+1ppm
动态:水平10mm+1ppm
垂直20mm+1ppm
初始化时间<10s
美国
12
Trimble RTK -R6\ R7\ R8
静态:水平3mm+0.5ppm
垂直5mm+0.5ppm
动态:水平8mm+1ppm
垂直15mm+1ppm
初始化时间<8s
美国
13
多波束8101
瑞士
31
捷创力GDM600
角度测量--
精度:2〞(Hz,V)
距离测量—
精度:2mm + 2ppm
瑞士
32
全站仪Leica TS30
瑞士
33
全站仪Leica TS11
瑞士
瑞士
26
电子水准仪Leica DNA03
电子测量-
铟钢尺:0.3mm/km
标准水准尺:1.0mm/km
光学测量:2.0mm
测距精度(电子):1cm/20m(500ppm)
测程-
电子测量:1.8m-110m
光学测量:0.6m以上
电子测量-
最小读数:0.01mm,0.0001ft,0.0005inch
单次测量时间一般3s
倾斜角度:操作时:+/-30°
英国
25
水准仪Leica NA2
往返测高程精度:
0.7mm/km
0.3mm/km(带测微计)
放大倍率:标准32x,FOK73目镜(可选)40x,FOK117目镜(可选)25x
补偿器设置精度:0.3''
补偿器工作范围:±30’
Hydrostar4300型双频测深仪
Hydrostar4300型双频测深仪操作说明书(德国ELAC Nautik公司制造)开机警示*打开机器时必须切断电源!!*不能带电插拔所有连接电缆!!Hydrostar4300双频测深仪按键说明“ON”---机器通电。
上一次的设置被激活。
“OFF”---按住此键3秒钟机器即被关掉。
“MARKER”---定标。
记录纸上产生垂直线。
可记录时间、定位数据。
---清除报警显示。
或控制键盘、记录纸和显示的背景亮度。
“ENTER”---进入菜单和确认转换“”---选择功能键并改变参数或选定参数。
“”---解除更改参数命令或离开所选菜单。
“RANGE”---进行手动测深范围选择。
记录纸按50m的范围变化。
或按25m自动调节测深范围。
“GAIN”---自动增益调节。
原机器设定的缺损值为“自动”。
“PRINTER”---控制记录纸速度(有快、慢、停止)三种选择。
而且可调节定标数(5、10、20、50个定标数)或转向MARKER键。
“GATE”---手动跟踪门便于数字化和底部跟踪。
可打印于记录纸。
一技术说明概述Hydrostar4300测深仪是一个微机控制的新设备。
其水深数值可以经串口输出,而且可以按三种方式记录在热敏打印纸上。
即DBK水深值:测量船底以下水深值;DBT水深值:换能器以下水深值;DBS水深值:水平面以下水深值;LCD显示可以显示测深值、时间、日期、定位值和报警水深值。
系统配置Hydrostar4300测深仪是一个可接多种频率的单、双频测深仪。
单频可接28、30、33、38、50、100、200KHz等频率的换能器;双频可接30/200KHz换能器。
系统配置流程图RS232)单、双频换能器技术参数电源要求DC9-36V;接交流电需交直流转换器功率消耗约30W工作温度0℃-55℃外壳材料铝外壳防护标准IP53探头阻抗50-150欧姆发射脉宽0.3; 1; 3ms。
根据测深范围调节测深量程 0-5m,0-10m,0-25m,0-50m,0-100m,0-250m,0-500m0-1000m。
南方SDE-28D双频测深仪的操作与应用

高频显示窗口
低频通道微调快捷键
高频通道微调快捷键
测深仪的量程与标尺
发射线
低频通道水底回波线 回波信号波形
发射波形 量程标尺 高频通道水底回波线
测深仪各功能快捷键的说明
各快捷功能键的说明 开启键:启动测深仪; 记录键:记录水深测量回波图象; 扩档键:加大量程档; 减档键:减小量程档; 上移键:测深仪显示界面上移; 下移键:测深仪显示界面下移; 恢复键:恢复默认设置; 参数键:打开参数设置栏; 低频键:打开低频参数设置栏; 高频键:打开高频参数设置栏;
由行”测量软件图标,接着系统会打开“自由行”软件界面和“28D测深仪”控制 界面。 3、在自由行软件里建立新的测量工程并设置连接GPS,并在测深仪界面里设置所需要 的有关参数,尤其是吃水和声速,在一般性的水深测量中选择自动测量比较适合, 但如果在很浅的水域或疏浚工地水域中测量时选择自动就不太合适,原因是水浅和 水浑都容易引起混响与干扰,会影响正常的水深测量和水深数字化处理,所以必须 选择手动比较合适,水浅:发射脉宽与增益应尽量调小,水深:发射脉宽与增益可 相应加大,但不可盲目加大,要看记录界面清晰度来调整,水浑:发射脉宽与增益 的调整要配合起来调整,特别是低频, 有时候不一定是都要加或都要减的调整方法, 两者之间一加一减是很正常的。 4、参数设置与测深仪调整正常后就可以进入正式的水深测量,在进行水深测量前应根 据当前的水深范围设定好相应的量程档位,以保证水深记录有良好的记录图象和分 辨率。
测绘专业名词中英文_测绘仪器

07.001经纬仪theodolite,transit07.002光学经纬仪optical theodolite07.003电子经纬仪electronic theodolite07.004激光经纬仪laser theodolite07.005精密经纬仪precision theodolite07.006工程经纬仪engineer's theodolite07.007全能经纬仪universal theodolite07.008天文经纬仪astronomical theodolite07.009陀螺经纬仪gyro theodolite,gyroscopic theodolite07.010矿山经纬仪mining theodolite07.011摄影经纬仪photo theodolite,camera transit07.012罗盘经纬仪compass theodolite07.013地磁经纬仪magnetism theodolite07.014坡面经纬仪slope theodolite (注:在普通经纬仪的望远镜上装个能给定腰线的望远镜。
)07.015数字经纬仪digital theodolite07.016悬式经纬仪hanging theodolite07.017测距经纬仪ranging theodolite07.018半站型测距经纬仪semi-total station distance theodolite07.019全站型光电速测经纬仪(又称“全站型电子速测仪”)total station optical electronic tacheometric theodolite,electronic tacheometer07.020激光地形仪laser topographic position finder07.021激光铅垂仪laser plummet apparatus07.022激光准直仪laser collimator07.023罗盘仪compass07.024手持测角仪hand goniometer07.025水准仪level07.026光学水准仪optical level07.027电子水准仪electronic level07.028精密水准仪precise level07.029工程水准仪engineerˊs level07.030陀螺水准仪gyro level07.031自动安平水准仪automatic level,compensator level07.032激光水准仪laser level07.033激光扫平仪laser swinger07.034手持水准仪hand level07.035平板仪plane-table07.036电子平板仪electronic plane-table07.037自动归算EDM照准仪auto-reduction EDM alidade07.038求积仪planimeter,platometer07.039电子求积仪electronic planimeter07.040电磁波测距仪electro-magnetic distance measuring instrument 07.041电子测距仪electronic distance measuring instrument,EDM 07.042光电测距仪electro-optical distance measuring instrument 07.043红外测距仪infrared EDM instrument07.044激光测距仪laser distance measuring instrument,laser ranger 07.045双色激光测距仪two-color EDM instrument07.046卫星激光测距仪satellite laser ranger07.047微波测距仪microwave distance measuring instrument07.048大地接收机georeceiver07.049 GPS接收机GPS receiver07.050等高仪astrolabe07.051光电等高仪photoelectric astrolabe07.052中星仪transit instrument07.053光电中星仪photoelectric transit instrument07.054象限仪quadrant07.055天文坐标量测仪astronomical coordinate measuring instrument07.056恒时钟sidereal clock07.057平时钟mean-time clock07.058原子钟atomic clock07.059金属弹簧重力仪metallic spring gravimeter07.060石英弹簧重力仪quartz spring gravimeter07.061超导重力仪superconductor gravimeter07.062绝对重力仪absolute gravimeter07.063微[加]重力仪microgravimeter07.064海洋重力仪marine gravimeter07.065摆仪pendulum apparatus,pendulum instrument07.066重力梯度仪gradiometer07.067地磁仪magnetometer07.068倾斜仪clinometer07.069伸缩仪extensometer07.070应变仪strainometer07.071自准直目镜(又称“高斯目镜”)autocollimating eyepiece07.072对角目镜(又称“弯管目镜”)diagonal eyepiece07.073测微目镜eyepiece with micrometer07.074激光目镜laser eyepiece07.075度盘circle07.076补偿器compensator(注:其灵敏元件在重力作用下,可使仪器某一轴线迅速、精确、可靠并自动安放在水平位置的装置。
em302多波束技术参数

em302多波束技术参数EM302多波束技术参数多波束技术是一种利用多个天线元件进行信号发射和接收的技术,能够提高雷达系统的性能和功能。
EM302多波束技术参数是指EM302多波束测深仪的相关性能参数,下面将对EM302多波束技术参数进行详细介绍。
1. 多波束数量:EM302多波束测深仪具有多波束功能,可以同时发射和接收多个波束。
多波束数量的增加可以提高测量的精度和效率。
2. 工作频率范围:EM302多波束测深仪的工作频率范围是指其能够发射和接收信号的频率范围。
不同的工作频率范围适用于不同的测量环境和需求。
3. 横向覆盖范围:EM302多波束测深仪的横向覆盖范围是指其能够测量的水平范围。
横向覆盖范围的大小影响着测量的全面性和准确性。
4. 纵向覆盖范围:EM302多波束测深仪的纵向覆盖范围是指其能够测量的垂直范围。
纵向覆盖范围的大小决定了测量的深度范围。
5. 分辨率:EM302多波束测深仪的分辨率是指其能够分辨的最小尺寸。
分辨率的提高可以提高测量的精度和细节展示能力。
6. 测量精度:EM302多波束测深仪的测量精度是指其测量结果与真实值之间的误差。
测量精度的高低直接影响着测量结果的可靠性和准确性。
7. 数据更新率:EM302多波束测深仪的数据更新率是指其能够获取和处理数据的速度。
数据更新率的快慢决定了测量的实时性和响应速度。
8. 接口类型:EM302多波束测深仪的接口类型是指其与其他设备连接的接口标准。
常见的接口类型包括以太网接口、串口接口等。
9. 功耗:EM302多波束测深仪的功耗是指其在工作过程中的能量消耗。
功耗的大小直接影响着设备的能源消耗和使用成本。
10. 尺寸和重量:EM302多波束测深仪的尺寸和重量是指其外形尺寸和重量。
尺寸和重量的大小对于设备的携带和安装都有一定的要求。
11. 工作温度范围:EM302多波束测深仪的工作温度范围是指其能够正常工作的温度范围。
工作温度范围的限制要求在实际应用中合理选择和控制。
双频鱼探仪jrc jfc-600中文说明书

JFC-600Echo sounder FF60– a new colour LCD echo sounder from JRC clearly distinguishes the type of fish, realising a profitable catch6.5” high visibility LCD screenDual frequency 50 & 200kHz600W RMS transmitting powerAutomatic mode selectionJFC-600 Echo sounder – performance featuresSingle frequency withbottom discriminationmodeSingle frequency withauto zoom modeDual frequency withA-scope modeNavigation mode -graphic displayDual frequency mode(night mode)The JFC-600 echo sounder continues thetradition of high performance, operating indual frequency as standard, resulting in a highlyaccurate and reliable read-out.Unique featuresJRC’s new echo sounder incorporates a 6.5” high definitioncolour LCD display. The innovative display modes (elevenavailable) allow you to select and view effortlessly theinformation you require. The operating status indicates gain,noise suppression and interference. The numerical data, suchas speed, position, depth and temperature are convenientlydisplayed and reappear in each display mode.Display modesThe JFC-600 includes a “dual frequency mixed mode”,enabling you to overlay 2 different frequencies, a uniquefeature normally only available on high-end echo sounders.Generally the lower frequency is more suitable for bottomdiscrimination, while the high frequency is more useful forshallow water detection.Dual frequency mixed modeCursor operationUser anddisplay controlPower and dimoperationThe JFC-600 also known as the FF60 integrates a highly reliable interfacing field. The transducer is the heart of the operation, receiving speed, depth and temperature information, sending ultrasonic signals which determine seabed conditions and the presence of life underwater.You also have the opportunity to connect a (D)GPS sensor and the JFC-600 has as well an NMEA 0183 input and output, enabling you to display navigation information. Flexible interfacingThe compact design of JRC’s echo sounder incorporates a new style of Man-Machine-Interface, providing enhanced ergonomics and user-friendliness. The large LCD screen accompanied by JRC’s customary menu structure ensures logical, accurate and convenient operation. Easy operationIf situations arise where automatic scaling is essential, the JFC-600 easily adapts to the mode selection, providing an optimised view. As you navigate to your next catch and you needa certain waypoint (up to 400 possible), depth or area, the automatic mode selection will simply adapt to the mode and displays what is required at that point.Automatic mode selectionWhat’s standard in the box?1. Echo sounder2. Spare parts3. Power cable (length 1.5 m)4. Sun cover5. Manual (English)。
双频测深仪原理

双频测深仪原理测深是指通过一定的方法来测量水深的一种技术。
随着科技的不断发展,测深仪也逐渐发展起来。
现在,双频测深仪已经成为一种常见的测深仪。
双频测深仪原理简单,它利用压电水晶振荡器来产生两个音频信号,这两个信号的频率分别为200 kHz和468 kHz。
这两个频率的信号通过一个发射器发送到水面上,然后透过水面到达水底,反射返回测深仪上。
当这两个信号回到测深仪时,会被接收器接收并通过一个信号处理器进行处理。
处理器的工作是确保两个信号之间的相位差与原始信号之间的相位差相同。
最终,通过这个相位差的测量值来计算出水的深度。
为了更好地理解双频测深仪的原理,我们需要详细了解一下其组成部分及其工作原理。
1.发射器发射器是双频测深仪的核心组成部分之一。
它由一个发射水晶和一个发射器驱动器组成。
发射器驱动器的作用是控制水晶振荡器的频率,从而产生200 kHz和468 kHz的两个频率信号。
发射器发送的两个频率信号会以不同的速度传播,因此它们会在水面和水底面反射和折射。
在水深较浅的情况下,这两个信号会在水底面反射并返回到测深仪上,而在水深更深的情况下,则会发生多次反射。
这就意味着,双频测深仪可以测量不同深度的水。
2.接收器接收器是双频测深仪的另一个关键部件。
接收器由两个水晶组成,这两个水晶分别接收发射器发送的两个频率信号。
当这两个信号返回到测深仪时,它们会被接收器接收。
接收器的作用是将这两个信号放大,并将其送到信号处理器中。
3.信号处理器信号处理器是双频测深仪的第三个关键部件。
它的作用是处理由接收器接收到的信号,并计算出水的深度。
在信号处理器中,两个信号的相位差会被测量,这个相位差的值将用于计算水的深度。
需要注意的是,双频测深仪的精度取决于信号的传播速度。
这个速度会在不同的水温和水盐度条件下发生变化。
因此,在使用双频测深仪时,需要对水温和水盐度进行校准,以确保测量结果的精度。
总之,双频测深仪是一种非常精确和可靠的测深仪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双频测深仪dual -frequency sounder
NHS1-Bathy1500双频测深仪
Bathy-1500 是双频水下地形测深仪的新标准。
这种经济型的水文测量仪器是一个完全集成的声纳测量系统。
它连接到外部外围设备的扩展配置中,例如:兼容NMEA0183 的定位探头,移动探头; 外部注释源; 外部同步; 大容量存储设备; 数字数据记录仪; 远程显示和TDU-850 热敏打印机。
Bathy-1500采用先进的基于微处理的电子元件,并具有背景光的灰度图形LCD图表显示器。
其声波特性包括强大的浅水和深水运行功能(最小深度<= .5m@200kHZ; 最大深度>5000m@12KHZ), 多操作频率和完全的手动或自动范围(区段)模式、接收器增益、传输功率和底部跟踪。
所有采集的水文测量数据都被标有
定位数据和时间。
向用户展现一个移动-补偿图表记录。
一个标准、内部的数据记录内存足以存储 2.5 小时的模拟水体数据和8 小时深度数字数据,可以用于在LCD 显示器上回放或通过外部设备打印出来。
Bathy-1500 测深仪同时实时打印热敏硬拷贝图形记录和通过标准的并行口界面储存所有处理的模拟水体数据或把ASCII 日志文件存储到大容量储存器中。
仪器前面板包括高对比度,灰度背景光LCD图形显示器和全封闭输入键盘。
可方便的得到所有的操作参数,并具有直接的声音和视觉反馈。
操作员随时方便的查看测深仪的视频数据,数字化深度数据和操作状态。
显示格式用户可以改变显示格式-可以全屏幕显示两个已安装频率中的任意一个频率的视频数据或在一个屏幕上对双频模式(交替传输)的视频数据进行分屏显示。
对显示的范围和区段进行手工选择或以全自动模式操作。
数字化深度
每个频率的数字化深度都突出可见、引人注目,并且以粗体显示在有灰度背景光的图形LCD 上。
数字化
深度分辨率为1cm或在100单位下为十分之一英尺。
单斜度测深仪,底部数据精度满足或超出所有当前IHO 水文要求。
一个功能强大的底部追踪算法确保底部锁定和发出精确的深度数据,甚至在难度最大和底部图形不同时也可以做到。
操作模式
单频和双频测深仪的功能模式。
在单频模式,用户可以在低频和高频通道之间选择。
在双频模式,测深仪从低频和高频通道向用户交替的提供两个同时底部图形中有代表性的声波信号。
声波传输的速率可以确保100%底部传导的水下测量目标的选样覆盖面。
换能器深水工作标准
频率斜度水深12 KHZ 18° 5000m 24 KHZ 22° 2000m 33 KHZ 21 ° 1000m 40 KHZ 20° 800m 100KHZ 9° 400m 200KHZ 3 ° 300m Bathy1500 测深仪标准设置•Bathy1500测深仪•换能器阻抗匹配箱• AC Power电缆•操作手册选择附件•外部大容量存储器•外部纸记录器•配有电缆的换能
器:12KHZ; 24KHZ; 33KHZ; 40KHZ; 100KHZ; 200KHZ •远程显示•架安装套件主机单元说明深
度区域(英尺或米)0-5 ,0-10 ,0-20 ,0-40 ,0-200 ,0-400 ,0-800 ,0-2000 ,0-5000 单位。
手动和自动范围控制模式。
区段(英尺或米)在400 单位设置区段或自动区段,区段范围0-400 ,200-600 ,400-800 等,直到4600-5000 单位。
操作模式单频或交替双频频率12KHZ; 24KHZ; 33KHZ; 40KHZ; 100KHZ; 200KHZ 分辨率1cm 或.1ft<=99.9 单位10cm 或.5ft>99.9 单位精确度0-40m- ± 2.5cm, 40-200m- ± 5.0cm,>200m- ± 10.0cm 最小深度<0.5m;取决于换能器声纳速率最大18HZ,取决于深度范围和操作模式传输功率通道1和通道2都具有
2KW的最大功率声速用户可在1400-1600m/s (4595-5250 f/s )中选择,增量为1个单位图形显示640 X 480象素,CCFL灰度背景的LCD数据输出NMEA01831.5,2.0 和 2.1 版本的字符串:(9600 或19200 波特率与字符串格式有关,无效验,8 位, 1 个停止位)DBT,DBS 和DPT。
ODEC专用序列字符串-ODEC HEAVE ODECDEPT 和ODEC BINARY用于图形数据输出)。
回放兼容输出-ODEC DBT ODOM SBT ATLAS DESO25 跳线选择
RS232/RS422 数据输入COM1 NMEA0183 1.5,2.0 和2.1 版本字符串:(9600 或19200 波特率,取决串的格式,无效验,8 位,1 个停止位)GLL,GGA,RMC,RMA,VTG,ZDA ODEC专用的注释序列输入字符串ANN跳线选择RS232/RS422。
数据输入
COM2移动输入(TSS TSS1或Seatex SOUNDERS式,可变输入速率为9600或19200,它取决于深度输出串的格式)。
远程注释,远程固定标志(ODEC专用或ODO兼容)。
外部同步(声纳同步)和外部控制。
外
部大容量(磁盘)存储器可选适配器电缆可以通过并行口界面把所有ASCII文本数据格式的深度,位置,速度,路线,注释和参数和/或声音图形信息存储到SCSI兼容设备。
纸硬拷贝从中心口(并行口)输岀
到TDU系列打印机输入功率115/230VAC (开关选择)50/60HZ; 60Watts 尺寸宽39.4cm(15.5.),高
29.21cm(11.5.) 和深21.59cm(8.5.) 重量10.7kg(23.5lbs)。