DMU运动仿真教案(相对完整版)
DMU运动仿真教案(相对完整版)

1.录制此教程纯属本人业余爱好,欢迎免费转载。
任 何组织和个人未经许可,不得用于商业用途。
2. 在录制过程中假定大家已经对CATIA这个软件有一 定的认识。
故此,对于CATIA三维建模系列模块涉及 到的功能,就不再详细讲解。
3.由于达索系列软件博大精深,本人能力有限,难免 出现错误。
若您发现错误,请告知与我,无比感激。
一.数字模型简介 二.数字模型浏览器模块 的几个常用功能一.数字模型简介Digital Mockup,译为数字化模型或者电子样机。
简称 “DMU”。
DMU可以具备从产品设计、制造到产品维护整个生命周期所 需的多项功能。
如包含:装配关系、公差、干涉检查、工艺、 材料、制造资源、人力资源、成本、安装拆卸、机构运动、 截面扫描、人机互动等等。
其实产品的三维建模就是DMU最基本的一步。
接下来就从DMU运动仿真模块的基本内容开始,和大家共同 学习下CATIA的DMU运动仿真的内容。
二.数字模型浏览器模块的几个常用功能1.1 英文界面1.2 中文界面DMU审查创建 DMU一般动画2.1 插入相机2.2 相机属性2.3 相机窗口4.1 轨迹工具条轨迹对话框记录器工具条 播放工具条4.2 实体的轨迹生成操作工具条4.3 相机的轨迹生成。
优选CATIA实用DMU运动仿真小教程

一、功能介绍
模块简介
功能键一览表
过程 将装配件导入DMU模块----建立机械装置----分析运动结合类型 ----建立运动结合----约束固定件----设置驱动形式----运动仿真
运动仿真有两种: 1、使用命令进行模拟 (可编辑传感器) 2、模拟 (可生成自动播放动画,也可编辑传感器)----可通 过编译模拟 ,生成重放 。
4. 固定零件
单机
中的 按钮,弹出右图所示窗口
,然后直接左键单击壳体part,这时系统会出现“可以模拟机
械装置”提示,点击确定
5、设置驱动形式
注意此时机械装置自由度=0,若不为0不能仿真 的,此项尤为重要。 修改: 下限改为-65°;上限改为0°
6、使用命令进行模拟
点击
中的 (使用命令
进行模拟)按钮,弹出右图所示窗口,电机“模
(4)其他约束 用旋转指令 将以下几个产品之间互相约束一起来。 ①、“波轮与连杆”;旋转副 ②、“连杆与风门连杆”;旋转副 ③、“风门连杆与壳体”;旋转副
壳体 波轮
连杆 命令在运动机构里面,点击其图标右下方的箭 头,点击后,选择图标
然后点击“风门连杆”跟“风门”
(3)约束 图中直线1、直线2、平面1、平面2,依次 选取壳体轴线、波轮轴线、壳体平面、波 轮平面,并单击“偏移”与“驱动角度”按 钮。单击确定
机械装置:运动机构名称 结合名称:运动副名称 直线1:波轮轴 直线2:壳体轴 平面1:破轮平面 平面2:壳体平面 驱动角度:点选可驱动波轮转动角度. (注意:驱动点选后自由度-1)
拟下的立刻”按钮,便可拖动上面的游标随意旋
转,也可使用“按需要”命令,修改一下右上角数
字框中的数据,就可点击下方的 箭头标示
adams运动仿真教学

起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4. 设置实体参3.53.数;On ground Length :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数 2 bod——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)测量和后处理①鼠标右键点击铲斗,打开右键快捷键,选择测量measure②系统打开参数设置对话框,将Characteristic设置为CM Point,Component 设置为Y,测量Y向位移。
CATIA DMU Kinematics Simulator运动模拟教程

Copyright DASSAULT SYSTEMES
Plane 1: select the left inner hinge plane Plane 2: select the left wheel surface
7:Assign the Angle driven command to the revolute joint if needed. 根据旋转联接需要选择角度驱动 8:Click Ok to end the revolute joint creation.The specification tree is updated accordingly: 点击OK结束旋转运动副创建 ,目录树随之更新
1
Create the Joints and eventually define the Laws创建联接和定义运动规律(运动性质)
2
OR… Convert Constraints, or V5 Mechanism转换约束或机构
3
Browse the Mechanism查看机构
5
Analyze the Results and Modify
Icon Name Revolute Prismatic Cylindrical Spherical Planar Rigid Roll Curve Slide Curve Point on Cuve Point Surface U Joint Gear joint Rack Joint Cable Joint Screw Joint CV Joint
《数控车床仿真实训》课程仿真教学法教学教案
《数控车床仿真实训》课程仿真教学法教学教案
第一篇数控车床仿真实训
b)立体图
屏幕右下方出现
选择机床”或点击
)点击,此时指示灯变亮;
“回原点”键;
点击轴键点击和键,灯变亮;
“定义毛坯”图标
放置零件”或点击“放置零件”图标→
利用
选择刀具
“选择刀具”图标
“编辑”键;
“程序”键
“插入”键;
“位置显示”键“手动”键点击点击键点击键,机床向。
注意:离工件较近时取消键。
“主轴正转”键
③点击键点击键,刀具试切工件外圆;
④点击键,
“主轴停止”键;
“参数输入”键
②刀具接近工件,点击键,点击键,切削工件端面;
③点击键,
“自动运行”键
“循环启动”键。
DMU运动机构模拟设计
圆筒形的 巧合: z axis1/z axis2
Sperical 在轴系统起源之间的巧合
螺丝钉 U 连接
巧合: z axis1/z axis2 (+程度) 在轴系统起源之间的巧合 而且按某一角度转动 90 deg: x axis1/z axis2
6
创造法律
一经你有一个能被模拟的 V5 机制, 你能增加法律,那是在 电影的时间和指令之间的一个联编 (s)
OFF
Clash Detection
ON
Stop on clash
动态的冲突当一个冲突发生的时候,发现工具将会藉着加 亮 / 停止表示你。 你将会为物体的移动定义对最低的和最高的价值谢谢
29
处理机制洋装-增加
附上或分离产品到联编
这可能是非常有用的在机制中设计程序: -产生一个将会表现你的机制电线体格 (1 电线 体格 / 移动元素 ) -把在设计后的 3D立体元素附在电线体格 -检查你的解决生存能力
资讯科技不可能的在痕迹会话盒子中直接地编辑点的数字价值。 被-途径: 用法律圣像按模拟而且改变步骤的数字价值:
产生的点是在同等的模 态中。
27
计算机清扫了体积
什么被清扫体积?
这是一个机制或重赛的成份移动的结果
有关叁考产品
一个感人的部份习惯于产生另外的移动 被清扫体积的部份。 (亲戚清扫了体积)
大约过滤了位置被清扫的体积非常昂 贵以处理器来说。 A simplified
Degrees of Freedom 1 Rotation 1 Translation 1 Rotation or 1 Translation 3 Rotations 2 Translations + 1 Rotation O degrees of Freedom 1 Rotation + 1Translation 2 Rotations + 1 Translation 3 Rotations + 1 Translation 2 Translations + 3 Rotations 2 Rotations 1 Rotation 1 Rotation or 1 Translation 1 Translation 1 Rotation and 1 Translation 2 U joints
CATIA DMU实例教程-雨刮器运动仿真
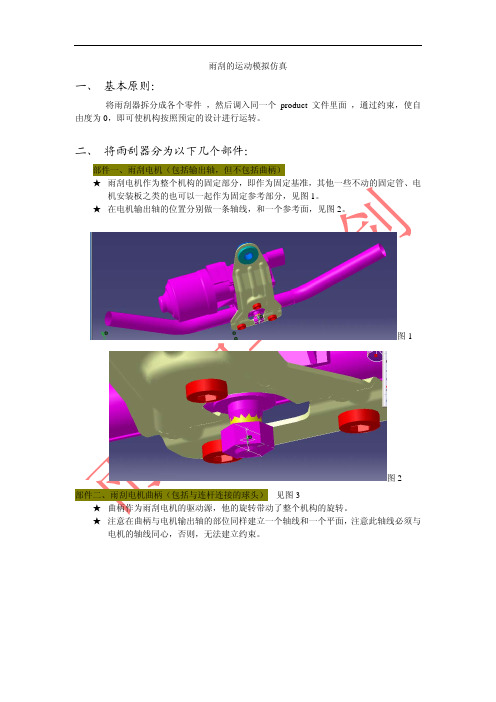
图 15 Line1 和 line2 分别对应前面所建立的轴线(必须同心),plane1 和 plane2 也是前面所建 立的平面,点击 offset 后,系统会计算出两个平面的距离,如为 0,说明你建的平面重回, 如果不为了,后面的运动过程中,两个零件间会始终保持这个距离。然后点击 angle driven, 确定后,则电机和曲柄之间其实就可以模拟运动了,即自由度为 0。 五、建立曲柄球头与连杆球碗处的约束
图 22
图 23 如果想看此最小距离根电机曲柄转动角度之间的关系,可以这样做: 返回图 23,将第一个角度,由“no”转换成“yes”即可,则输出的 excel 文件会包含角度 与距离的关系。右边一行为角度值供 60 个数据(与上述黑色三角的“60 步相对应”),总角 度 360.左边一行为距离值。
机安装板之类的也可以一起作为固定参考部分,见图 1。 ★ 在电机输出轴的位置分别做一条轴线,和一个参考面,见图 2。
图1
图2 部件二、雨刮电机曲柄(包括与连杆连接的球头)---见图 3
★ 曲柄作为雨刮电机的驱动源,他的旋转带动了整个机构的旋转。 ★ 注意在曲柄与电机输出轴的部位同样建立一个轴线和一个平面,注意此轴线必须与
图8
二、建立一个新的运动机构 图9
输入 060630
图 10 确定后点作为固定基准的电机。此时,已经建立了一改以电机为基准的运动机构名称 060630.
此时目录树上的约束分支会出现已经建立的固定约束
图 11
三、建立相对固定约束 出4 此时先点击电机,会在 part1 显示电机的零部件名称,再点击主衬套,则 part2 会显示主衬 套的零部件名称。点击确定,则主衬套就相对于电机固定了。 副衬套相对电机的固定也是按上述操作。 四、建立电机与曲柄的约束
CATIA实用DMU运动仿真小教程-2016

4. 固定零件
单机
中的 按钮,弹出右图所示窗口
,然后直接左键单击壳体part,这时系统会出现“可以模拟机
械装置”提示,点击确定
5、设置驱动形式
注意此时机械装置自由度=0,若不为0不能仿真 的,此项尤为重要。 修改: 下限改为-65°;上限改为0°
6、使用命令进行模拟
点击
中的 (使用命令
进行模拟)按钮,弹出右图所示窗口,电机“模
整播放速度,点击上面的黑色开始键。
8、过程分析
在仿真运动过程中,点击
中
的 按钮,下拉碰撞模式列表
;
便可选择干涉来检查运动机构。
9、视频制作 用第三方软件录制视频
干涉显示
三、作业
要求: 可使波轮机构进行模拟运转。 方法二选一:1、使用命令进行模拟 2、动画模拟
下载地址:
THANK YOU
运动机构
动画模拟工具条
DMU运动副工具条
接合点:
二、案例分析
案例:左出风口波轮运动模拟
效果视频:
左出风口波轮运动案例
1. 仿真之前的准备 将要仿真的模型所需的部件在装配模式下按照技术要求进 行装配。装配时请注意,在能满足合理装配的前提下,尽 量少用约束,以免造成约束之间互相干涉,影响下一步运 动仿真。
2. 打开模块 通过“开始(S)”——“数字化装配”——“DMU 运动机构”
3. 约束(旋转副) 进入到运动仿真的模式下,开始进行仿真设置: (1)对装配部件进行约束设置,命令在运动机构里面,点击 其图标右下方的箭头,点击后,选择图标
(2)旋转结合—创建机械装置 ①、点击 按钮,弹出右图1窗口; ②、点击右上角“新机械装置”,弹出图2窗口; ③、单击“确定”按钮,弹出图3窗口;
(完整版)Adams课程设计
目录一启动ADAMS (3)二设置工作环境 (3)三用升程表创建凸轮轮廓曲线 (4)四创建凸轮实体 (8)五创建尖顶从动件 (14)六创建凸轮和尖顶从动件之间的接触(Contact) (15)七创建移动副和旋转副 (16)八创建驱动 (18)九保存模型 (18)十测试模型 (20)凸轮机构尖顶直动从动件盘形凸轮机构的凸轮基圆半径mm r 600=,已知:从动件行程mm h 40=,推程运动角为ο1500=δ,远休止角ο60=s δ,回程运动角ο1200='δ,近休止角为ο30='s δ;从动件推程、回程分别采用余弦加速度和正弦加速度运动规律。
对该凸轮机构进行模拟仿真。
1. 从动件推程运动方程推程段采用余弦加速度运动规律,故将已知条件mm h 406/51500===、。
πδ代入余弦加速度运动规律的推程段方程式中,推演得到⎪⎪⎪⎩⎪⎪⎪⎨⎧=≤≤=-=δωπδδωδ56cos 8.28)6/50( 56sin 24)56cos 1(202a v s2. 从动件远休程运动方程在远休程s δ段,即6/76/5πδπ≤≤时, 0,0,===a v h s 。
3. 从动件回程运动方程因回程段采用正弦加速度运动规律,将已知条件mm h v 403/21200==='、πδο代入正弦加速度运动规律的回程段方程式中,推演得到[]⎪⎪⎪⎩⎪⎪⎪⎨⎧--=≤≤---=⎥⎦⎤⎢⎣⎡-+-⨯=)5.33sin(180)6/116/7( )5.33cos(160)5.33sin(212375.2402πδωππδππδωππδπδπa v s 4. 从动件近休程运动方程在近休程s 'δ段,即πδπ26/11≤≤时,0,0,0===a v s 。
一启动ADAMS双击桌面上ADAMS/View的快捷图标,打开ADAMS/View。
在欢迎对话框中选择“Create a new model”,在模型名称(Model name)栏中输入:tuluen ;在重力名称(Gravity)栏中选择“Earth Normal (-Global Y)”;在单位名称(Units)栏中选择“MMKS –mm,kg,N,s,deg”。
(完整版)曲柄连杆机构运动学仿真
课程设计任务书目录1 绪论 (1)1.1 CATIAV5 软件介绍 (1)1.2 ADAMS软件介绍 (1)1.3 S IM D ESIGNER软件介绍 (2)1.4 本次课程设计的主要内容及目的 (2)2 曲柄连杆机构的建模 (3)2.1 活塞的建模 (3)2.2 活塞销的建模 (5)2.3 连杆的建模 (5)2.4 曲轴的建模 (6)2.5 汽缸体的建模 (8)3 曲柄连杆机构的装配 (10)3.1 将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10)4 曲柄连杆机构导入ADAM.S (14)4.1 曲柄连杆机构各个零部件之间运动副分析 (14)4.2 曲柄连杆机构各个零部件之间运动副建立 (14)4.3 曲柄连杆机构导入ADAM S (16)5 曲柄连杆机构的运动学分析 (17)结束语 (22)参考文献 (23)1 绪论1.1 CATIA V5 软件介绍CATIA V5( Computer-graphics Aided Three-dimensional Interactive Application ) 是法国Dassault公司于1975 年开发的一套完整的3D CAD/CAM/CAE 一体化软件。
它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。
CATIA V5 不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。
CATIA V5 大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC 加工等领域。
由于其功能的强大而完美,CATIA V5 已经成为三维CAD/CAM 领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。
法国的幻影2000 系列战斗机就是使用CATIA V5 进行设计的一个典范;波音777客机则使用CATIA V5 实现了无图纸设计。
DMU Kinematics 讲义
• 创建螺旋桨的约束 ,并使固定件刚性连接 • 建立函数驱动约束,使约束按照函数关系运动
9
Master Exercise - Step 2
Plane : Create Joint and Law
•螺旋桨约束 •4个刚性连接 •函数驱动关系式: Command1=KinTime *1 rad / 1s
?
最后的门与气弹簧 筒之间应用何种约 束?
5
B22-BACK DOOR DMU
5
因为门与铰链已经用了Revolute(同轴且面等距离)约束,因此门在添加驱动的条件 下已经可以独立运动,门中的任何一个点或者面相对于铰链轴方向不会存在任何上下窜动; 同理,气弹簧的杆中的任何点或者面也不会相对于安装螺栓轴的方向上有任何窜动; 气弹簧筒与气弹簧杆之间约束为同轴,在杆的带动下,只可能在杆的中心轴线上存在运动而不会 在杆的安装轴方向上存在上下窜动。 结论:由于门与气弹簧分别饶FIX部件中的旋转轴线旋转,并且通过Revolute的约束,不会在 轴线方向上产生上下窜动,因此用同轴约束即可,若用Revolute约束将产生过约束。
10
Master Exercise - Step 3
Plane : Simulate the Mechanism
步骤:
1.用函数运动模拟观看 2.打开传感器,检查转动角度
11
Master Exercise - Step 4
Plane : Create an Animation
用自动插入建立一个运动模拟 用REPLAY编译运动模拟
3
Creating a Mechanism
4
B22-BACK DOOR DMU
1
确定固定部件,由背门结构看,装在侧围钣金上的铰链部 分应该设为FIX。
仿真教案

课题:第一章基本操作课次:第一次授课日期: 9月13日、9月14日授课班级: 0916班教学方法:在计算机上操作、讲授教学目的及要求:熟悉控制面板界面,掌握数控车床的测量教学重难点:数控车床的零件的测量教学小结:初步认识数控车床仿真界面,熟练数控车床的零件的测量,只有通过测量才能学习对刀导入新课:学习数控车床的操作,如果要让同学们直接去数控车间实习操作的话,由于是初次不熟悉,容易出错,如果由于误操作造成了不可估量的损失的话,可能机床受损也可能人员受伤,所以我们可以用仿真来代替试习,这样即使操作时出错也没事,下次注意,等到了一定的熟练程度再到实习车间实际操作就可以避免这些不必要的损失。
那么接下来我们就一起来打开仿真界面看一下仿真机床是什么样子。
讲授新课:1.1 项目文件的作用保存操作结果,但不包括过程。
1.2 项目文件的内容包括机床、毛坯、经过加工的零件、选用的刀具和夹具、在机床上的安装位置和方式;输入的参数:工件坐标系、刀具长度和半径补偿数据;输入的数控程序。
1.3 对项目文件的操作新建项目文件打开菜单“文件\新建项目”;选择新建项目后,就相当于回到重新选择后机床的状态。
打开项目文件打开选中的项目文件夹,在文件夹中选中并打开后缀名为“.MAC”的文件。
保存项目文件打开菜单“文件\保存项目”或“另存项目”;选择需要保存的内容,按下“确认”按钮。
如果保存一个新的项目或者需要以新的项目名保存,选择“另存项目”,当内容选择完毕,还需要输入项目名。
保存项目时,系统自动以用户给予的文件名建立一个文件夹,内容都放在该文件夹之中,默认保存在用户工作目录相应的机床系统文件夹内。
1.4 零件模型如果仅想对加工的零件进行操作,可以选择“导入\导出零件模型”,零件模型的文件以“.PRT”为后缀。
1.5 视图变换的选择在工具栏中选之一,它们分别对应于菜单“视图”下拉菜单的“复位”、“局部放大”、“动态缩放”、“动态平移”、“动态旋转”、“测视图”、“俯视图”、“前视图”。
机械运动仿真课程设计
机械运动仿真课程设计一、课程目标知识目标:1. 学生能理解机械运动的基本概念,掌握机械运动仿真的原理和方法。
2. 学生能够运用相关物理知识,解释和分析简单机械系统的运动情况。
3. 学生能够运用仿真软件进行基本机械运动的模拟,并理解仿真结果。
技能目标:1. 学生能够运用数学和物理知识建立简单的机械运动模型。
2. 学生能够操作仿真软件,进行模型的搭建、参数设置和运动仿真。
3. 学生能够分析仿真数据,优化机械系统的设计和运动性能。
情感态度价值观目标:1. 培养学生对机械运动的兴趣,激发探索精神和创新意识。
2. 培养学生团队协作意识,提高沟通与交流能力。
3. 增强学生将理论知识应用于实际问题的意识,培养解决实际问题的能力。
课程性质:本课程为实践性较强的学科,结合物理和数学知识,通过仿真软件进行教学。
学生特点:学生处于高中年级,具备一定的物理和数学基础,对新鲜事物充满好奇,具备较强的动手能力。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,充分调动学生的主观能动性,培养其创新思维和实际操作能力。
将课程目标分解为具体的学习成果,以便于后续教学设计和评估。
二、教学内容1. 机械运动基本概念:介绍机械运动、参考系、位移、速度、加速度等基本概念,结合课本第二章内容。
2. 机械运动定律:回顾牛顿运动定律,分析简单机械系统受力情况,运用课本第三章知识。
3. 仿真软件操作:学习仿真软件的基本操作,包括模型搭建、参数设置、仿真运行等,结合课本第四章内容。
4. 机械运动建模:运用数学和物理知识建立简单机械系统的运动模型,参照课本第五章内容。
5. 仿真数据分析:分析仿真结果,理解机械系统运动性能,优化设计,运用课本第六章知识。
6. 实践操作:分组进行机械运动仿真实验,培养团队协作和实际操作能力。
教学大纲安排:第一周:机械运动基本概念,参考系和运动描述。
第二周:机械运动定律,分析简单机械系统受力情况。
第三周:仿真软件操作培训,学习基本功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.录制此教程纯属本人业余爱好,欢迎免费转载。
任 何组织和个人未经许可,不得用于商业用途。
2. 在录制过程中假定大家已经对CATIA这个软件有一 定的认识。
故此,对于CATIA三维建模系列模块涉及 到的功能,就不再详细讲解。
3.由于达索系列软件博大精深,本人能力有限,难免 出现错误。
若您发现错误,请告知与我,无比感激。
一.数字模型简介 二.数字模型浏览器模块 的几个常用功能
一.数字模型简介
Digital Mockup,译为数字化模型或者电子样机。
简称 “DMU”。
DMU可以具备从产品设计、制造到产品维护整个生命周期所 需的多项功能。
如包含:装配关系、公差、干涉检查、工艺、 材料、制造资源、人力资源、成本、安装拆卸、机构运动、 截面扫描、人机互动等等。
其实产品的三维建模就是DMU最基本的一步。
接下来就从DMU运动仿真模块的基本内容开始,和大家共同 学习下CATIA的DMU运动仿真的内容。
二.数字模型浏览器模块的几个常用功能
1.1 英文界面
1.2 中文界面
DMU审查创建 DMU一般动画
2.1 插入相机
2.2 相机属性
2.3 相机窗口
4.1 轨迹工具条
轨迹对话框
记录器工具条 播放工具条
4.2 实体的轨迹生成
操作工具条
4.3 相机的轨迹生成
。