ANSYS 接触单元分析
ansys接触分析入门知识
ansys接触分析入门知识在ansys中,有专门的接触单元用于解决各种不同的接触问题。
对于点对点接触问题有二维点对点接触单元CONTAC12、三维点对点接触单元CONTAC52和CONTAC178。
为了能够使用这些点对点接触单元,需要预先知道明确的接触位置,即使在几何非线性的情况下,接触面之间也只能允许有较小的相对滑动。
对于面对点接触问题,常用的有用来模拟柔性点对刚性面接触单元CONTAC26、二维点对面接触单元CONTAC48、三维点对面接触单元CONTAC49、CONTAC175.这类接触单元,不需要预先知道确切的接触位置,二期接触面之间也不需要保持一致的网格,同时允许有大的变形和相对滑动。
对于面对面接触问题,有二维2节点的低阶线接触单元CONTAC171、3节点的高阶抛物线接触单元CONTAC172、三维4节点的缔结四边形接触单元CONTAC173、8节点的高阶四边形接触单元CONTAC174.由于面跟面之间的相互接触,有一个目标面和接触面的问题,因此使用这些接触单元必须同时使用配对单元(用来模拟目标面和目标单元)。
同CONTAC171和CONTAC172配对的是二维目标单元TARGET169,同CONTAC173和CONTAC174配对的是三维目标单元TARGET170.面对面单元比点对面单元具有更好的性能、对接触的位置、范围要求更宽,但是接触的求解结果却更好。
三大类接触单元的使用并不是限制的很死,只要对问题的本质理解清楚,就能灵活运用。
比如两个面上的节点一一对应,相对滑动又可忽略不计,两个面的挠度、转动保持小量,那么就可以用点对点接触单元来模拟面对面的接触问题。
又如能通过一组节点来定义接触面,生成多个单元,那么就可以用点对面的对接触单元来模拟面对面的接触问题。
接触单元就像皮肤一样覆盖在下面的有限元模型上,会自动跟踪整个变形过程。
对于点对点的接触情况,只要对节点赋予点对点接触单元即可。
对于点对面或面对面接触情况,还涉及到选取目标面的问题。
ANSYS高级接触分析资料
§2 接触单元
§2 接触单元
• 3. 点-点接触单元用于模拟单点和另一个确定点 之间的接触。
• 建立模型时必须事先知道确切的接触位置; • 多个点-点接触单元可以模拟两个具有多个单元
表面间的接触; ◦ 每个表面的网格必须是相同的; ◦ 相对滑动必须很小; ◦ 只对小的转动响应有效。 • 例如: 点一点接触可以模拟一些面的接触。如地基
和土壤的接触
§2 接触单元
§3 关于耦合和约束方程的应用
• 如果接触模型没有摩擦,接触区域始终粘在一起,并且分 析是小挠度、小转动问题,那么可以用耦合或约束方程代 替接触。
• 使用耦合或约束方程的优点是分析还是线性的
接触问题的一般特性
• §1 接触刚度
• 1、所有的 ANSYS 接触单元都采用罚刚度(接触刚度)来 保证接触界面的协调性
• 接触面和目标面确定准则
• 如凸面和平面或凹面接触,应指定平面或凹面为目标 面;
• 如一个面上的网格较粗而另一个面上的网格较细,应 指定粗网格面为目标面;
• 如一个面比另一个面的刚度大,应指定刚度大的面为 目标面;
• 如一个面为高阶单元而另一面为低阶单元,应指定低 阶单元面为目标面;
• 如一个面比另一个面大,应指定大的面为目标面。
•
可变形目标面采用
•
Main Menu > Preprocessor > Modeling > Create >
Elements > Surf/Contact > Surf to Surf(ESURF)
• 对于直接生成刚性目标面,在建立目标单元之前需要要指定附加的单元属 性 TSHAP
• 刚性目标面的自动划分不需要 TSHAP。ANSYS 能根据 实体模型确定合适的目标单元形状。
ANSYS接触分析_学习手记
◆前提:◇有限元模型。
◇已识别接触面及目标面。
(*可应用自由度耦合来替代接触。
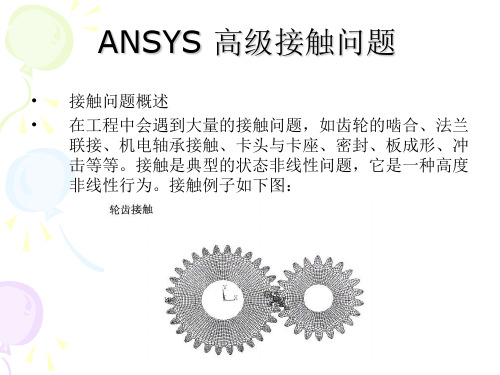
)选择目标面和接触面的准则:1.凸面和凹面或平面接触是,选平面或凹面为目标面。
2、接触的两个面网格划分有粗细的话,选粗网格所在面为目标面。
3两个面刚度不同时,选择刚度大的面为目标面4如果两个面为一个高阶单元,一个为低阶单元,选低阶单元为目标面 5.如果一个面比另一个面大选大的面为目标面。
2.◆定义接触单元及实常数◇(刚性)目标单元—— TARGE169 TARGE170 ;◇(柔性)接触单元—— CONTA171~CONTA172。
***Commands***ET,K,169 !K - 指定的单元编号ET,K+1,172*** ****◇实常数——一个接触对对应同一个实常数号。
TARGE单元的实常数包括:R1、R2 —定义目标单元几何形状CONTA单元的实常数包括:No. Name Description1 R1 Target circle radius(刚性环半径)2 R2 Superelement thickness(单元厚度)*3 FKN Normal penalty stiffness factor(法向接触刚度因子)*4 FTOLN Penetration tolerance factor(最大允许的穿透)*5 ICONT Initial contact closure(初始闭合因子)6 PINB Pinball region(“Pinball”区域)*7 PMAX Upper limit of initial allowable penetration(初始穿透的最大值)*8 PMIN Lower limit of initial allowable penetration(初始穿透的最小值)*9 TAUMAX Maximum friction stress(最大的接触摩擦)*10 CNOF Contact surface offset(施加于接触面的正或负的偏移值)11 FKOP Contact opening stiffness or contact damping*12 FKT Tangent penalty stiffness factor(切向接触刚度)13 COHE Contact cohesion(滑动抗力粘聚力)14 TCC Thermal contact conductance(热接触传导系数)15 FHTG Frictional heating factor(摩擦耗散能量的热转换率)16 SBCT Stefan-Boltzmann constant17 RDVF Radiation view factor18 FWGT Heat distribution weighing factor19 ECC Electric contact conductance20 FHEG Joule dissipation weight factor21 FACT Static/dynamic ratio(静摩擦系数和动摩擦系数的比率)22 DC Exponential decay coefficient(摩擦衰减系数)23 SLTO Allowable elastic slip24 TNOP Maximum allowable tensile contact pressure25 TOLS Target edge extension factor附注:+值作为比例因子,-值作为绝对值;带*号的实常数比较重要,关乎接触分析的收敛;一般实常数可为缺省值。
ANSYS接触实例分析参考
ANSYS接触实例分析参考1.实例描述一个钢销插在一个钢块中的光滑销孔中。
已知钢销的半径是0.5 units, 长是2.5 units,而钢块的宽是 4 Units, 长4 Units,高为1 Units,方块中的销孔半径为0.49 units,是一个通孔。
钢块与钢销的弹性模量均为36e6,泊松比为0.3.由于钢销的直径比销孔的直径要大,所以它们之间是过盈配合。
现在要对该问题进行两个载荷步的仿真。
(1)要得到过盈配合的应力。
(2)要求当把钢销从方块中拔出时,应力,接触压力及约束力。
2.问题分析由于该问题关于两个坐标面对称,因此只需要取出四分之一进行分析即可。
进行该分析,需要两个载荷步:第一个载荷步,过盈配合。
求解没有附加位移约束的问题,钢销由于它的几何尺寸被销孔所约束,由于有过盈配合,因而产生了应力。
第二个载荷步,拔出分析。
往外拉动钢销1.7 units,对于耦合节点上使用位移条件。
打开自动时间步长以保证求解收敛。
在后处理中每10个载荷子步读一个结果。
本篇先谈第一个载荷步的计算。
下篇再谈第二个载荷步的计算。
3.读入几何体首先打开ANSYS APDL然后读入已经做好的几何体。
从【工具菜单】-->【File】-->【Read Input From】打开导入文件对话框找到ANSYS自带的文件(每个ansys都自带的)\Program Files\Ansys Inc\V145\ANSYS\data\models\block.inp【OK】后,四分之一几何模型被导入。
4.定义单元类型只定义实体单元的类型SOLID185。
至于接触单元,将在下面使用接触向导来定义。
5.定义材料属性只有线弹性材料属性:弹性模量36E6和泊松比0.36.划分网格打开MESH TOOL,先设定关键地方的网格划分份数然后在MESH TOOL中设定对两个体均进行扫略划分,在volumeSweeping中选择pick all,按下【Sweep】按钮,在主窗口中选择两个体,进行网格划分。
ANSYS高级接触分析
图3-1
• 接触面和目标面确定准则
• 如凸面和平面或凹面接触,应指定平面或凹面为目标 面;
• 如一个面上的网格较粗而另一个面上的网格较细,应 指定粗网格面为目标面;
• 如一个面比另一个面的刚度大,应指定刚度大的面为 目标面;
• 如一个面为高阶单元而另一面为低阶单元,应指定低 阶单元面为目标面;
• 如一个面比另一个面大,应指定大的面为目标面。
• 接触单元就是掩盖在分析模型接触面上 的一层单元。
• 在 ANSYS 中可以承受三种不同的单元 来模拟接触:
•
面一面接触单元;
•
点一面接触单元;
§2 接触单元
• 不同的单元类型具有完全不同的单元特性和分 析过程。
• 1. 面一面接触单元用于任意外形的两个外表接 触
• 不必事先知道接触的准确位置; • 两个面可以具有不同的网格; • 支持大的相对滑动; • 支持大应变和大转动。 • 例如: 面一面接触可以模拟金属成型,如轧制
•
面-面接触单元在面的高斯点处传递压力,这种先进技术使面-面接触
单元具有很多优点:
•
与低阶单元和高阶单元都兼容
•
供给更好的接触结果〔于后处理接触压力和摩擦应力〕
•
可考虑壳和梁的厚度,以及壳的厚度变化
•
半自动接触刚度计算
•
刚性外表由“把握节点 – pilot node”把握
•
热接触特性
•
众多的高级选项来处理简洁问题。
2、摩擦消耗能量,并且是路径相关行为。 为获得较高的精度,时间步长必需很小〔图2-1〕
图2-1
3、ANSYS 中,摩擦承受库仑模型,并有附加选项可 处理简洁的粘着和剪切行为。 库仑法则是宏观模型,表述物体间的等效剪力 FT 不能超过正压力 FN 的一局部: FT <= μ× FN 式中: μ- 摩擦系数 一旦所受剪力超过 FT,两物体将发生相对滑动。
ANSYS收敛性问题-接触单元
ANSYS收敛性问题-接触单元
ANSYS在计算过程中偶尔存在收敛性问题,往往问题出现时,无法判断具体原因,另分析人员十分困惑和无奈。
这种收敛性问题在计算混凝土极限承载力或桩基承载力时出现的概率比较多。
笔者最近在求解桩土相互作用时,遇到了收敛性问题,下面仅讲述我调试过程中的一些思路,供大家参考。
桩土分析模型主要特点是含有很大的接触面积,需要考虑桩土摩擦力,同时土壤材料使用DP材料。
桩和土体使用接触单元处理彼此间力的相互作用。
在计算初期,计算需要很长时间的迭代无法收敛。
我想可能是来自于以下几方面原因:
(1)上层土体强度太低,变形程度太大,网格发生畸变;
(2)接触区域太长,属于那种细长比很大的情况,接触关系无法较好的模拟;
(3)网格不够细密,桩深度方向无法较好的模拟摩擦。
通过对以上几个原因进行反复测试,偶尔会出现收敛的情况,但方案变了还是会存在不收敛的情况。
最后,笔者采用变量的方式设置所有接触对的接触刚度和渗透容差,将接触刚度设置为0.5,渗透容差因子设置为2,结果模型在求解任何方案时均具有良好的收敛性。
这也表明,接触刚度和渗透容差是影响收敛性的关键问题。
全面详细讲解ansys接触分析
搜集整理的资料,详细讲解ansys接触分析,有实例命令流,亲测过。
包括以下部分。
一般的接触分类ANSYS接触能力点─点接触单元点─面接触单元面─面的接触单元执行接触分析面─面的接触分析.接触分析的步骤:步骤1:建立模型,并划分网格步骤二:识别接触对步骤三:定义刚性目标面步骤4:定义柔性体的接触面步骤5:设置实常数和单元关键字步骤六:步骤7:给变形体单元加必要的边界条件步骤8:定义求解和载步选项第十步:检查结果点─面接触分析点─面接触分析的步骤点-点的接触接触分析实例(GUI方法)非线性静态实例分析(命令流方式)接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS 使用的接触单元和使用它们的过程,下面分类详述。
ANSYS接触分析
1. ..... 2. ..... 3. ..... Procedure
Lesson Objectives
1
ANSYS 支持三种接触方式:点 - 点、点 - 面和面 - 面 接触。有限元模型通过指定的接触单元来识别可能的 Guidelines 接触对,接触单元是覆盖在分析模型接触面之上的一 层单元。 一、点-点接触单元 该单元主要用于模拟点-点的接触行为,但需预先知 道接触位置。这类接触只适用于接触面之间有较小相 对滑动的情况。如果两个面上的节点一一对应,相对 滑动又可以忽略不计,且两个面的挠度保持小量,则 可以由点-点接触单元来求解面-面的接触问题。 二、点-面接触单元 该单元主要用于给点-面的接触行为建模,例如两根 梁的相互接触。使用这类单元不需预先知道接触位置, 接触面之间也不需要保持一致的网格,并允许有大变 形和大的相对滑动。
8
a. 直接生成法生成目标单元
Main Menu>Preprocessor>Modeling-Create> Elements > Element Attributes 然 后指定单元形状,可能的形状有: Straight Line(2D)、Parabola(2D)、 Clockwise Arc(2D)、 Counter clockwise Arc(2D) 、 Circle(2D) 、 Triangle(3D) 、 Cylinder (3D)、Cone(3D)、Sphere(3D)、Pilot Node(2D,3D)
16
3、选接触算法 由单元关键字KEYOPT(2)来指定。使用拉格朗 日算法的同时应使用实常数FTOLN,缺省为0.1。 4、决定接触刚度 接触刚度过大,会导致总刚的病态,从而造成 收敛困难;接触刚度过小,又会造成过大的穿透 量。因此接触刚度应有一个最优点,兼顾两方面。 程序会根据变形体单元的材料特性估计一个缺省 的接触刚度值,可以用实常数 FKN来对它进行缩 放或指定一真正值。比例因子在 0.01 ~ 10 之间。 可以先选一个较低值进行估算,然后检查逐渐增 大到合适的值。(注意判断不收敛是什么因素引起 的 )。
ANSYS高级接触分析
• 如凸面和平面或凹面接触,应指定平面或凹面为目标 面;
• 如一个面上的网格较粗而另一个面上的网格较细,应 指定粗网格面为目标面;
• 如一个面比另一个面的刚度大,应指定刚度大的面为 目标面;
• 如一个面为高阶单元而另一面为低阶单元,应指定低 阶单元面为目标面;
• 如一个面比另一个面大,应指定大的面为目标面。
• 接触单元就是覆盖在分析模型接触面上的一层 单元。
• 在 ANSYS 中可以采用三种不同的单元来模拟 接触:
◦
面一面接触单元;
◦
点一面接触单元;
◦
点一点接触单元。
§2 接触单元
• 不同的单元类型具有完全不同的单元特性和分 析过程。
• 1. 面一面接触单元用于任意形状的两个表面接 触
• 不必事先知道接触的准确位置; • 两个面可以具有不同的网格; • 支持大的相对滑动; • 支持大应变和大转动。 • 例如: 面一面接触可以模拟金属成型,如轧制
• 在数学上为保持平衡,需要有穿透值 • 然而,物理接触实体是没有穿透的 • 分析者将面对困难的选择: • 小的穿透计算精度高,因此接触刚度应该大; • 然而,太大的接触刚度会产生收敛困难:模型可能会振荡,接触
表面互相跳开。 • 接触刚度是同时影响计算精度和收敛的最重要的参数。你必须选
定一个合适的接触刚度。 • 除了在表面间传递法向压力外,接触单元还传递切向运动(摩
◦
开始估计时,选用
◦
FKN = 1.0 大面积实体接触
◦
FKN = 0.01-0.1 较柔软(弯曲占主导的部分)
• 另外,也可以指定一个绝对刚度值,单位:(力/ 长度)/ 面积。
• 对于点一点(除 CONTA178)和点-面接触单元需 要为罚刚度 KN 输入绝对值:
Ansys接触分析和设置
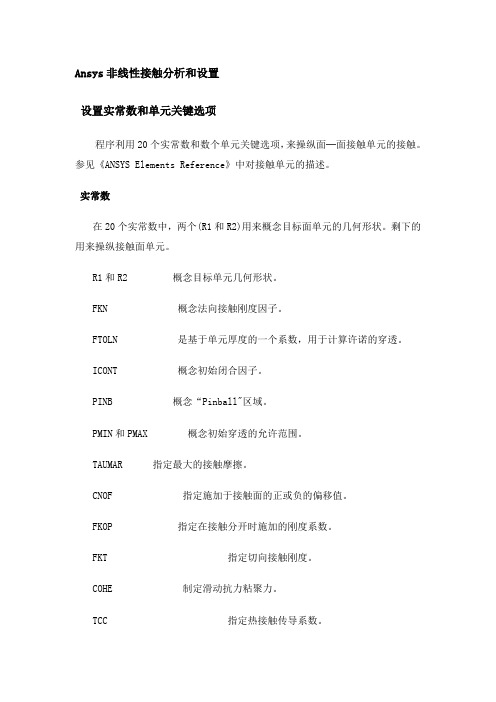
Ansys非线性接触分析和设置设置实常数和单元关键选项程序利用20个实常数和数个单元关键选项,来操纵面─面接触单元的接触。
参见《ANSYS Elements Reference》中对接触单元的描述。
实常数在20个实常数中,两个(R1和R2)用来概念目标面单元的几何形状。
剩下的用来操纵接触面单元。
R1和R2 概念目标单元几何形状。
FKN 概念法向接触刚度因子。
FTOLN 是基于单元厚度的一个系数,用于计算许诺的穿透。
ICONT 概念初始闭合因子。
PINB 概念“Pinball"区域。
PMIN和PMAX 概念初始穿透的允许范围。
TAUMAR 指定最大的接触摩擦。
CNOF 指定施加于接触面的正或负的偏移值。
FKOP 指定在接触分开时施加的刚度系数。
FKT 指定切向接触刚度。
COHE 制定滑动抗力粘聚力。
TCC 指定热接触传导系数。
FHTG 指定摩擦耗散能量的热转换率。
SBCT 指定 Stefan-Boltzman 常数。
RDVF 指定辐射观看系数。
FWGT 指定在接触面和目标面之间热散布的权重系数。
FACT 静摩擦系数和动摩擦系数的比率。
DC 静、动摩擦衰减系数。
命令: RGUI:main menu> preprocessor>real constant对实常数 FKN, FTOLN, ICONT, PINB, PMAX, PMIN, FKOP 和 FKT,用户既能够概念一个正值,也能够概念一个负值。
程序将正值作为比例因子,将负值作为绝对值。
程序将下伏单元的厚度作为ICON,FTOLN,PINB,PMAX 和 PMIN 的参考值。
例如 ICON = 说明初始闭合因子是“*基层单元的厚度”。
但是,ICON = 那么表示真实调整带是单位。
若是下伏单元是超单元,那么将接触单元的最小长度作为厚度。
参见图5-8。
图5-8 基层单元的厚度在模型中,若是单元尺寸转变专门大,而且在实常数如 ICONT, FTOLN, PINB, PMAX, PMIN 中应用比例系数,那么可能会显现问题。
Ansys 做接触分析

对于接触面的选择的指导原则:1、对于点对面有:1)如果一个面的接触部分四平的或凹的,另一个面的接触部分是尖的或凸的,则平、凹面是目标面。
2)如果两个面都是平的,则任意选择3)如果两个面都是凸的,则较平的的面作为目标面。
4)如果一个接触部分有尖边,另一个没有,则有尖边的面作为目标面。
平的通常为2、对于面对面有:1)如果一个凸面与一个平面或凹面接触,平面或凹面是目标面;2)如果一个面比另一个面硬,则较硬的面应该为目标面;3)如果一个面比另一个面大,则较大的面应该为目标面;4)如果一个面上的网格比较粗,另一个面的网格较细,则较粗的面应该是目标面;5)如果一个面是高阶,另一个面是低阶,低阶面应该是目标面。
总结:弱小的、宽容的、差的通常为目标面3、接触单元常数( ET,K,169 !K - 指定的单元编号 ET,K+1,172)目标单元(刚性)——targe 169 or targe 170Targe 单元的实常数有:R1、R2 定义目标单元几何形状CONTA单元的实常数包括:No. Name Description1 R1 Target circle radius(刚性环半径)2 R2 Superelement thickness(单元厚度)*3 FKN Normal penalty stiffness factor(法向接触刚度因子)*4 FTOLN Penetration tolerance factor(最大允许的穿透)*5 ICONT Initial contact closure(初始闭合因子)6 PINB Pinball region(“Pinball”区域)*7 PMAX Upper limit of initial allowable penetration(初始穿透的最大值)*8 PMIN Lower limit of initial allowable penetration(初始穿透的最小值)*9 TAUMAX Maximum friction stress(最大的接触摩擦)*10 CNOF Contact surface offset(施加于接触面的正或负的偏移值)11 FKOP Contact opening stiffness or contact damping*12 FKT Tangent penalty stiffness factor(切向接触刚度)13 COHE Contact cohesion(滑动抗力粘聚力)14 TCC Thermal contact conductance(热接触传导系数)15 FHTG Frictional heating factor(摩擦耗散能量的热转换率)16 SBCT Stefan-Boltzmann constant17 RDVF Radiation view factor18 FWGT Heat distribution weighing factor19 ECC Electric contact conductance20 FHEG Joule dissipation weight factor21 FACT Static/dynamic ratio(静摩擦系数和动摩擦系数的比率)22 DC Exponential decay coefficient(摩擦衰减系数)23 SLTO Allowable elastic slip24 TNOP Maximum allowable tensile contact pressure25 TOLS Target edge extension factor附注:+值作为比例因子,-值作为绝对值;带*号的实常数比较重要,关乎接触分析的收敛;一般实常数可为缺省值。
Ansys非线性接触分析和设置
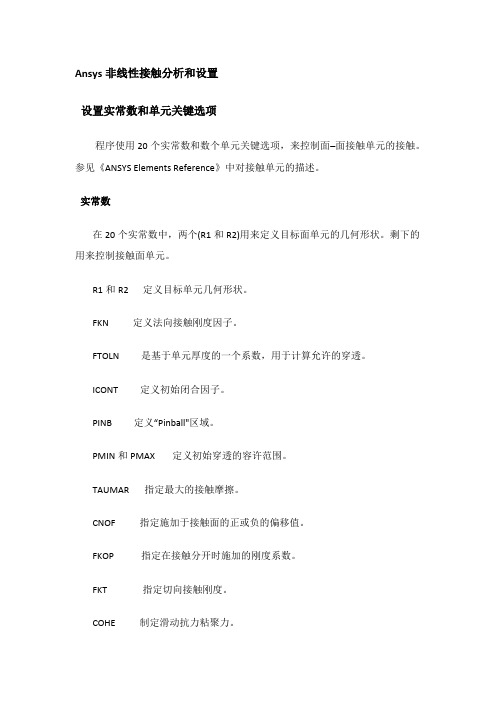
Ansys非线性接触分析和设置设置实常数和单元关键选项程序使用20个实常数和数个单元关键选项,来控制面─面接触单元的接触。
参见《ANSYS Elements Reference》中对接触单元的描述。
实常数在20个实常数中,两个(R1和R2)用来定义目标面单元的几何形状。
剩下的用来控制接触面单元。
R1和R2 定义目标单元几何形状。
FKN 定义法向接触刚度因子。
FTOLN 是基于单元厚度的一个系数,用于计算允许的穿透。
ICONT 定义初始闭合因子。
PINB 定义“Pinball"区域。
PMIN和PMAX 定义初始穿透的容许范围。
TAUMAR 指定最大的接触摩擦。
CNOF 指定施加于接触面的正或负的偏移值。
FKOP 指定在接触分开时施加的刚度系数。
FKT 指定切向接触刚度。
COHE 制定滑动抗力粘聚力。
TCC 指定热接触传导系数。
FHTG 指定摩擦耗散能量的热转换率。
SBCT 指定Stefan-Boltzman 常数。
RDVF 指定辐射观察系数。
FWGT 指定在接触面和目标面之间热分布的权重系数。
FACT 静摩擦系数和动摩擦系数的比率。
DC 静、动摩擦衰减系数。
命令:RGUI:main menu> preprocessor>real constant对实常数FKN, FTOLN, ICONT, PINB, PMAX, PMIN, FKOP 和FKT,用户既可以定义一个正值,也可以定义一个负值。
程序将正值作为比例因子,将负值作为绝对值。
程序将下伏单元的厚度作为ICON,FTOLN,PINB,PMAX 和PMIN 的参考值。
例如ICON = 表明初始闭合因子是“*下层单元的厚度”。
然而,ICON = 则表示真实调整带是单位。
如果下伏单元是超单元,则将接触单元的最小长度作为厚度。
参见图5-8。
图5-8 下层单元的厚度在模型中,如果单元尺寸变化很大,而且在实常数如ICONT, FTOLN, PINB, PMAX, PMIN 中应用比例系数,则可能会出现问题。
Ansys接触分析

Ansys接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体-柔体的接触,和柔体-柔体的接触,在刚体-柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体-柔体的接触,许多金属成形问题归为此类接触,另一类,柔体-柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点-点,点-面,和面-面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSYS使用的接触单元和使用它们的过程,下面分类详述。
点-点接触单元点-点接触单元主要用于模拟点-点的接触行为,为了使用点-点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点-点的接触单元来求解面-面的接触问题,过盈装配问题是一个用点-点的接触单元来模拟面-面的接触问题的典型例子。
最新ANSYS命令流学习笔记3-Solid单元的接触分析资料
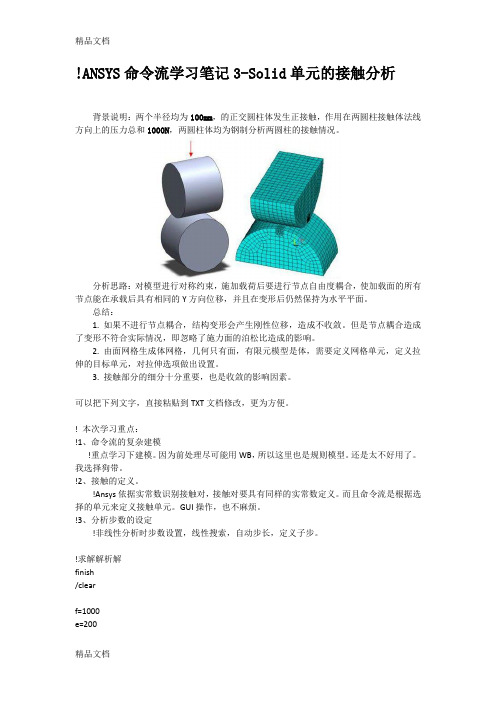
!ANSYS命令流学习笔记3-Solid单元的接触分析背景说明:两个半径均为100mm,的正交圆柱体发生正接触,作用在两圆柱接触体法线方向上的压力总和1000N,两圆柱体均为钢制分析两圆柱的接触情况。
分析思路:对模型进行对称约束,施加载荷后要进行节点自由度耦合,使加载面的所有节点能在承载后具有相同的Y方向位移,并且在变形后仍然保持为水平平面。
总结:1. 如果不进行节点耦合,结构变形会产生刚性位移,造成不收敛。
但是节点耦合造成了变形不符合实际情况,即忽略了施力面的泊松比造成的影响。
2. 由面网格生成体网格,几何只有面,有限元模型是体,需要定义网格单元,定义拉伸的目标单元,对拉伸选项做出设置。
3. 接触部分的细分十分重要,也是收敛的影响因素。
可以把下列文字,直接粘贴到TXT文档修改,更为方便。
! 本次学习重点:!1、命令流的复杂建模!重点学习下建模。
因为前处理尽可能用WB,所以这里也是规则模型。
还是太不好用了。
我选择狗带。
!2、接触的定义。
!Ansys依据实常数识别接触对,接触对要具有同样的实常数定义。
而且命令流是根据选择的单元来定义接触单元。
GUI操作,也不麻烦。
!3、分析步数的设定!非线性分析时步数设置,线性搜索,自动步长,定义子步。
!求解解析解finish/clearf=1000e=200r=100 !命令不区分大小写,参数也不区分大小写。
p=2.45*(f*e**2*((r+r)/(r*r))**2)**(1/3) !接触应力的解析解61.73,有限元法结果59.9MPa !正式分析命令流finish/clear/prep7 !进入前处理et,1,solid185et,2,mesh200keyopt,2,1,6 !查看help中关于mesh200和keyopt的解释,KEYOPT, ITYPE, KNUM, VALUE。
此处意思为定义了mesh(2)为4 nodes的四边形单元(1,6)。
mp,ex,1,2e11mp,prxy,1,0.3 !定义et 1的材料属性,Elastic moduli 和Poisson's ratios,(lab,mat,co)!lab这里是系统规定的,输出结果表格时lab是可以自定义的。
ANSYS高级接触分析

图3-3
• 例:Seal.dat (图3-3) • Step 5. 建立接触面单元 • 设置接触单元属性、选择可变形体表面节点,并在可 变形体上建立接触单元(过程与在可变形体上建立目标单 元相同) Main Menu > Preprocessor > Modeling > Create > Elements > Surf/Contact > Surf to Surf (ESURF) • 这些接触单元与基体有同样的阶数(低阶或高阶)。 • 注意,在壳或梁单元上建立目标单元或接触单元时, 可以选择要在梁或壳单元的顶层还是底层建立单元。
例如: 超弹密封
• Step 3. 设置单元选项和实常数 • 接触对由实常数号来定义,接触单元和目标单元必须具有相同的实常数。 • Step 4. 建立目标单元(网格) • 此步中所采用的方法依赖于目标面是刚性的还是柔性的。 • 刚性目标面采用: • 直接生成 (E 命令) • 自动划分 (LMESH, AMEAH) • 可变形目标面采用 • Main Menu > Preprocessor > Modeling > Create > Elements > Surf/Contact > Surf to Surf(ESURF) • 对于直接生成刚性目标面,在建立目标单元之前需要要指定附加的单元属 性 TSHAP
• 2、接触刚度的选取
选定一个合适的接触刚度值需要一些经验。 • 对于面一面接触单元,接触刚度通常指定为基体单 元刚度的一个比例因子。 ◦ 开始估计时,选用 ◦ FKN = 1.0 大面积实体接触 ◦ FKN = 0.01-0.1 较柔软(弯曲占主导的部分) • 另外,也可以指定一个绝对刚度值,单位:(力/ 长度)/ 面积。 • 对于点一点(除 CONTA178)和点-面接触单元需 要为罚刚度 KN 输入绝对值: ◦ 初始估计时: ◦ 对于大变形: 0.1*E < KN < 1.0*E ◦ 对于弯曲: 0.01*E < KN < 0.1*E ◦ E 为弹性模量
Ansys 做接触分析
对于接触面的选择的指导原则:1、对于点对面有:1)如果一个面的接触部分四平的或凹的,另一个面的接触部分是尖的或凸的,则平、凹面是目标面。
2)如果两个面都是平的,则任意选择3)如果两个面都是凸的,则较平的的面作为目标面。
4)如果一个接触部分有尖边,另一个没有,则有尖边的面作为目标面。
平的通常为2、对于面对面有:1)如果一个凸面与一个平面或凹面接触,平面或凹面是目标面;2)如果一个面比另一个面硬,则较硬的面应该为目标面;3)如果一个面比另一个面大,则较大的面应该为目标面;4)如果一个面上的网格比较粗,另一个面的网格较细,则较粗的面应该是目标面;5)如果一个面是高阶,另一个面是低阶,低阶面应该是目标面。
总结:弱小的、宽容的、差的通常为目标面3、接触单元常数( ET,K,169 !K - 指定的单元编号 ET,K+1,172)目标单元(刚性)——targe 169 or targe 170Targe 单元的实常数有:R1、R2 定义目标单元几何形状CONTA单元的实常数包括:No. Name Description1 R1 Target circle radius(刚性环半径)2 R2 Superelement thickness(单元厚度)*3 FKN Normal penalty stiffness factor(法向接触刚度因子)*4 FTOLN Penetration tolerance factor(最大允许的穿透)*5 ICONT Initial contact closure(初始闭合因子)6 PINB Pinball region(“Pinball”区域)*7 PMAX Upper limit of initial allowable penetration(初始穿透的最大值)*8 PMIN Lower limit of initial allowable penetration(初始穿透的最小值)*9 TAUMAX Maximum friction stress(最大的接触摩擦)*10 CNOF Contact surface offset(施加于接触面的正或负的偏移值)11 FKOP Contact opening stiffness or contact damping*12 FKT Tangent penalty stiffness factor(切向接触刚度)13 COHE Contact cohesion(滑动抗力粘聚力)14 TCC Thermal contact conductance(热接触传导系数)15 FHTG Frictional heating factor(摩擦耗散能量的热转换率)16 SBCT Stefan-Boltzmann constant17 RDVF Radiation view factor18 FWGT Heat distribution weighing factor19 ECC Electric contact conductance20 FHEG Joule dissipation weight factor21 FACT Static/dynamic ratio(静摩擦系数和动摩擦系数的比率)22 DC Exponential decay coefficient(摩擦衰减系数)23 SLTO Allowable elastic slip24 TNOP Maximum allowable tensile contact pressure25 TOLS Target edge extension factor附注:+值作为比例因子,-值作为绝对值;带*号的实常数比较重要,关乎接触分析的收敛;一般实常数可为缺省值。
Ansys静力学接触分析判断标准
Ansys静力学接触分析判断标准
当两个分离的表面互相碰触并共切时,就称它们牌接触状态。
在一般的物理意义中,牌接触状态的表面有下列特点:
1、不互相渗透;
2、能够互相传递法向压力和切向摩擦力;
3、通常不传递法向拉力。
接触分类:刚性体一柔性体、柔性体一柔性体实际接触体相互不穿透,因此,程序必须在这两个面间建立-一种关系,防止它们在有限元分析中相互穿过。
---罚函数法。
接触刚度
--- lagrange乘子法,增加-一个附加自由度(接触压力),来满足不穿透条件
---将罚函数法和lagrange乘子法结合起来,称之为增广lagrange法。
三种接触单元:节点对节点、节点对面、面对面。
接触单元的实常数和单元选项设置:FKN:法向接触刚度。
这个值应该足够大,使接触穿透量小;同时也应该足够小,使问题没有病态矩阵。
FKN值通常在0.1-10之间,对于体积变形问题,用值 1.0(默认),对弯曲问题,用值0.1。
ANSYS命令流学习笔记3-Solid单元的接触分析

!ANSYS命令流学习笔记3-Solid 单元的接触分析背景说明:两个半径均为100mm,的正交圆柱体发生正接触,作用在两圆柱接触体法线方向上的压力总和1000N,两圆柱体均为钢制分析两圆柱的接触情况。
分析思路:对模型进行对称约束,施加载荷后要进行节点自由度耦合,使加载面的所有节点能在承载后具有相同的Y方向位移,并且在变形后仍然保持为水平平面。
总结:1. 如果不进行节点耦合,结构变形会产生刚性位移,造成不收敛。
但是节点耦合造成了变形不符合实际情况,即忽略了施力面的泊松比造成的影响。
2. 由面网格生成体网格,几何只有面,有限元模型是体,需要定义网格单元,定义拉伸的目标单元,对拉伸选项做出设置。
3. 接触部分的细分十分重要,也是收敛的影响因素。
可以把下列文字,直接粘贴到TXT文档修改,更为方便。
! 本次学习重点:!1、命令流的复杂建模!重点学习下建模。
因为前处理尽可能用WB,所以这里也是规则模型。
还是太不好用了。
我选择狗带。
!2、接触的定义。
!Ansys 依据实常数识别接触对,接触对要具有同样的实常数定义。
而且命令流是根据选择的单元来定义接触单元。
GUI 操作,也不麻烦。
!3、分析步数的设定!非线性分析时步数设置,线性搜索,自动步长,定义子步。
!求解解析解finish/clearf=1000e=200r=100 ! 命令不区分大小写,参数也不区分大小写。
p=2.45*(f*e**2*((r+r)/(r*r))**2)**(1/3) !接触应力的解析解61.73,有限元法结果59.9MPa!正式分析命令流finish/clear/prep7 !进入前处理et,1,solid185et,2,mesh200keyopt,2,1,6 !查看help 中关于mesh200 和keyopt 的解释,KEYOPT, ITYPE, KNUM, VALU。
E 此处意思为定义了mesh(2)为4 nodes 的四边形单元(1,6)。
ANSYS接触分析

ANSYS接触分析ANSYS是一种广泛使用的工程仿真软件,能够进行各种工程问题的数值分析和模拟。
接触分析是ANSYS中的一种重要分析方法,用于研究和评估两个或多个物体之间的接触行为。
接触分析在机械、土木、汽车、航空航天等领域都有广泛应用,在设计和优化工程系统时提供了重要指导。
接触分析的基本原理是通过建立接触面上的接触条件和力学行为模型,来预测接触过程中的应力、应变和接触面的变形情况。
使用接触分析可以评估接触面上的压力分布、接触面的形状变化、摩擦力和接触面之间的滑动行为等。
接触分析能够帮助工程师优化设计,提高系统可靠性和效率。
ANSYS提供了多种接触分析方法,包括接触与非线性分析(contact and nonlinear analysis)、接触单元分析(contact element analysis)和基于拉格朗日和欧拉方法的接触分析(Lagrange and Euler contact analysis)等。
不同的方法适用于不同的接触问题,例如铰链接触、摩擦接触和完全粘连接触等。
在进行接触分析时,首先需要定义接触区域,即两个或多个物体之间的接触面。
接触面可以是平面、曲面或曲线,可以通过CAD模型导入或手动创建。
接下来,需要定义接触材料的特性,包括弹性模量、泊松比和摩擦系数等。
然后,需要为接触面上的节点或单元分配合适的边界条件,例如约束条件和荷载。
最后,可以运行接触分析并获得结果。
ANSYS的接触分析模块提供了丰富的分析结果和可视化工具,可以帮助用户理解接触行为并进行设计优化。
常见的结果包括两个物体之间的接触面积、接触面的法向压力分布、接触区域的摩擦力和切向位移等。
通过分析这些结果,可以评估接触性能和接触界面的强度。
总结来说,ANSYS接触分析是一种重要的工程仿真方法,可以用于评估两个或多个物体之间的接触行为。
它能够帮助工程师优化设计,提高系统可靠性和效率。
通过定义接触区域、材料特性和边界条件,运行接触分析并分析结果,可以得到关于接触性能和接触界面强度的重要信息。
ANSYS 接触单元分析

• 接触单元被约束, 不能侵入目标面. 然而, 目标单元能够侵入接触面.
October 20, 2000
接触非线性 – 5.7版本
8-22
选择接触刚度
• 接触刚度是接触面的相对刚度的函数.
• 对于块状实体, 通常赫兹接触刚度 (Hertz contact stiffness)适 用于罚刚度, 可以这样估算:
•
k = fE
• 式中f 是介于0.1~10之间的系数, E是较软的接触材料的弹性模量. 设 f=1 通常是一个较好的起始值.
• 面对面接触单元由分别定义目标和接触表面的独立的单元类型 组成. 接触对通过共用一个实常数指定.
• 目标169和170单元 - 刚性或可变形的目标表面 • 接触171到 174单元 - 二维和三维接触单元
• 面对面接触单元象皮肤一样覆盖在下面的有限元模型上. 这些单元 非常适合面对面接触应用, 如过盈装配接触、进料接触、锻造和深 拉深.
October 20, 2000
接触非线性 – 5.7版本
8-16
补充信息:
节点对节点接触过程
接触12单元由实常数THETA定向. 接触12单元能用作钩子或间 隙, 而接触52单元只能用作间隙 (注意通过约束UZ自由度,接触 52单 元能够用于二维问题).
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8-2
接触问题
接触问题是高度非线性的, 并且对于非线性问题的求解具有典型的挑 战意义.
接触问题提出两个重要的挑战:
在多数接触问题中接触区域是未知的. 表面与表面会突然接触或突然 不接触, 这会导致系统刚度的突然变化.
多数接触问题包括摩擦. 摩擦是与路径有关的现象, 这要求精确的加 载历史. 摩擦的响应还可能是杂乱的, 使求解难以收敛.
接触12单元和接触52单元都用罚函数法施加接触协调条件. 这要求 输入一个罚刚度(在后面我们将详细讨论罚刚度的计算).
October 20, 2000
接触非线性 – 5.7版本
8-14
节点对节点接触单元
• 节点对节点接触单元能够用于建立点对点接触模型. 接触点始终已 知的管抖动模型是点对点接触的一个例子.
October 20, 2000
接触非线性 – 5.7版本
8-16
补充信息:
节点对节点接触过程
接触12单元由实常数THETA定向. 接触12单元能用作钩子或间 隙, 而接触52单元只能用作间隙 (注意通过约束UZ自由度,接触 52单 元能够用于二维问题).
通过设置关键选项(4)和实常数INTF及GAP, 接触12单元和接触 52 单元都允许给出初始过盈或初始间隙.
关于接触12单元和接触52单元选项和实常数的详细叙述, 请参看 ANSYS单元手册(ANSYS Elements Reference )第四章.
October 20, 2000
接触非线性 – 5.7版本
8-17
节点对表面接触单元
节点对表面接触单元: M
K
J I
接触48单元 - 二维节点对表面
L
K
I
F
不施加接触协调条件时发生侵入
F
接触
目标
October 20, 2000
接触非线性 – 5.7版本
8-8
接触协调条件
用一个弹簧施加接触协调条件称为罚函数法. 弹簧刚度或接触刚度 称为罚参数.
该弹簧的变形量 满足方程: F=k
F
接触刚度(k)越大, 接触表面的侵入越
少. 然而, 若该值太大, 会导致收敛困
第八章 接触非线性
本章目标
Session Objective
本章学完后, 应能对如下功能进行描述和论证:
1. 接触协调条件 2. 刚体对柔体和柔体对柔体接触 3. 节点对节点、节点对面和面对面接触单元 4. 接触刚度 5. 接触单元处理 6. 接触向导
October 20, 2000
接触非线性 – 5.7版本
难.
October 20, 2000
接触非线性 – 5.7版本
8-9
接触协调条件
还可用另外一种方法, 即拉格朗日乘子法, 增加一个附加自由度(接 触压力), 以满足不侵入条件.
F
October 20, 2000
接触非线性 – 5.7版本
8-10
接触协调条件
将罚函数法和拉格朗日乘子法结合起来施加接触协调条件合称为增 强的拉格朗日法. 在迭代的开始, 接触协调条件基于惩罚刚度决定. 一旦达到平衡, 就检 查许可侵入量. 这时, 如果有必要, 接触压力增大, 继续进行迭代.
8-15
节点对节点接触过程
接触12单元和接触52单元既能用直接生成法创建, 也能在重合节点 处创建单元.
前处理器 -> 创建 -> 单元 -> 在重合节点 ( Preprocessor -> Create -> Elements -> At Coincid Nd)
接触12单元 应该在重合节点间创建. 然而接触52单元要求1E-6的距 离来定向单元.
October 20, 2000
接触非线性 – 5.7版本
8-5
刚体表面 变形体
刚体对柔体接触
October 20, 2000
接触非线性 – 5.7版本
8-6
柔体对柔体接触
花键轴过盈配合, 两个零件 都是柔体.
October 20, 2000
接触非线性 – 5.7版本
8-7
接触协调条件
为了阻止接触表面相互穿过, 这两个表面间必须建立一个关系. 否 则这两个表面将相互穿过.
October 20, 2000
接触非线性 – 5.7版本
8-4
接触分类
接触问题一般分为两类: 刚体对柔体和柔体对柔体.
刚体对柔体: 一个或多个接触表面作为刚体(一个表面的刚度比 另一个表面的刚度要高很多). 许多金属成形问题归入此类.
柔体对柔体: 两个或所有的接触体都可变形(所有表面刚度相差 不多). 螺栓法兰连接是一个柔体对柔体接触的例子.
• 如果两个表面的节点一一对应, 相对滑动变形量可以忽略, 并且两表 面的挠度(转动量)较小, 那么这些单元还能用于模拟面对面接触问题 . 过盈配合问题是面对面接触问题的一个例子. 如果满足上述条件, 则此问题用间隙单元是足够的.
• 注意点对点接触只能用于低次单元.
October 20, 2000
接触非线性 – 5.7版本
October 20, 2000
F
接触非线性 – 5.7版本
许可侵入量
8-11
October 20, 2000
增大的拉格朗日
由于平衡 改正侵入量
接触非线性 – 5.7版本
增大接触应力 减少侵入量
在改正阶段 发生振荡
8-12
接触单元
ANSYS有三种类型的接触单元:
节点对节点 - 这是指接触的最终位置事先是知道的.
October 20, 2000
接触非线性 – 5.7版本
8-3
关于耦合和约束方程的注释
• 如果接触模型没有摩擦, 接触区域始终粘在一起, 并且分析是小 挠度、小转动问题, 那么可以用耦合或约束方程代替接触. 详细 信息请参看ANSYS建模和网格划分指南.
• 使用耦合或约束方程的优点是分析还是线性的.
J
接触49单元三维节点对表面 Nhomakorabea这些单元用缺省的罚函数法作为接触协调条件. 作为一个选项,可以 使用综合的罚函数和拉格朗日乘子.
October 20, 2000
接触非线性 – 5.7版本
8-18
节点对表面接触单元
• 节点对表面接触单元典型用于建立点对面接触应用模型, 如两个梁接 触 (在梁的末端)和锁扣配合的角部.
节点对面 - 接触区域未知, 并且允许大滑动.
面对面 -接触区域未知, 并且允许大滑动 (相对节点对面接触形式有几个优点).
October 20, 2000
接触非线性 – 5.7版本
8-13
节点对节点接触单元
两个最常用的节点对节点接触单元:
J
I
I 接触12单元 - 二维间隙
J 接触52单元 - 三维间隙