总线知识小结
总线基本知识(精)

2
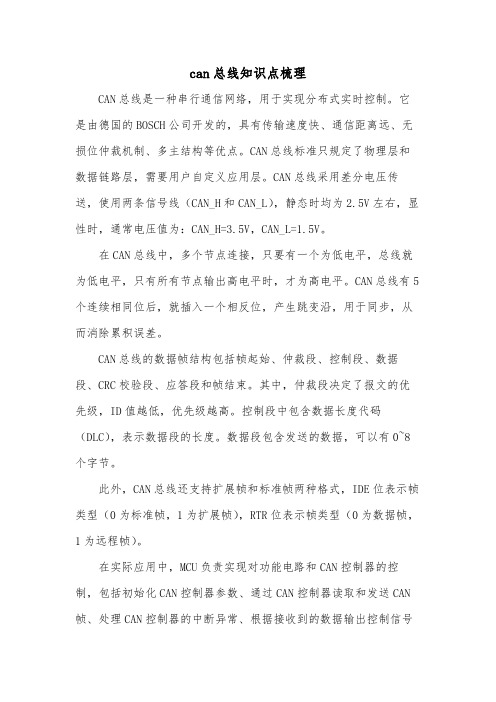
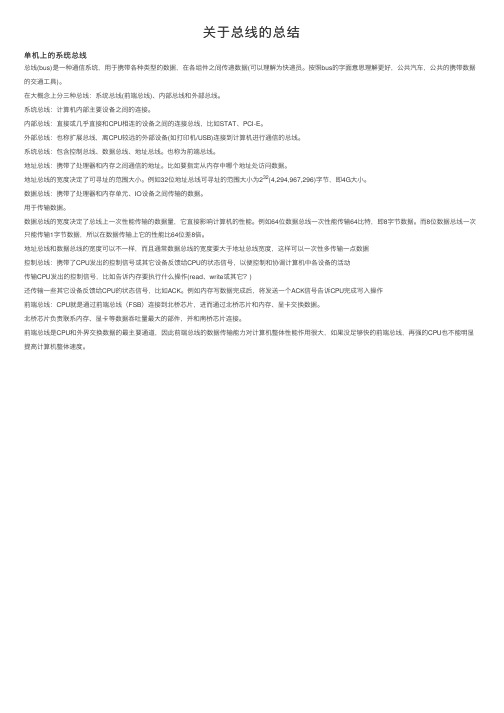
2. PCI总线的系统
CPU Cache CPU / PCI 桥接器 PCI 总线 # 1 DRAM
PCI / ISA桥接器 PCI 总线 设备 PCI 总线 设备 ISA 总线 ISA 总线 设备 I / O 控制 串口 设备 PCI 总线 #2
PCI / PCI 桥接器
PCI 总线 设备
PCI 总线 设备
(a)
RS-485总线
——采用平衡发送和差分接收 ——采用半双工工作方式 ——可以联网构成分布式系统,最多达128台驱动器和 128接收器
Next
Home
2
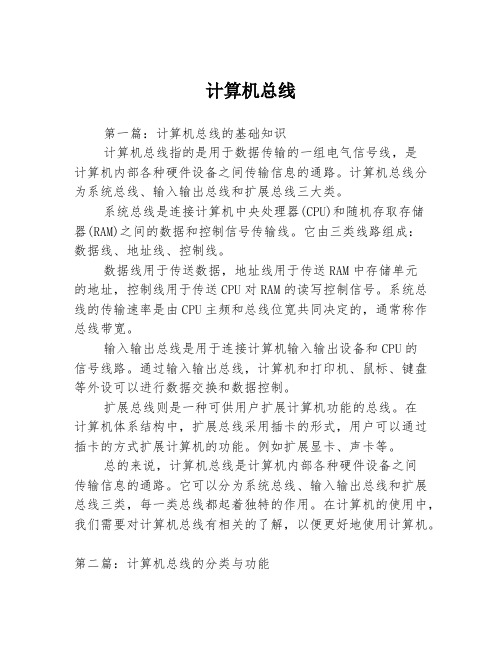
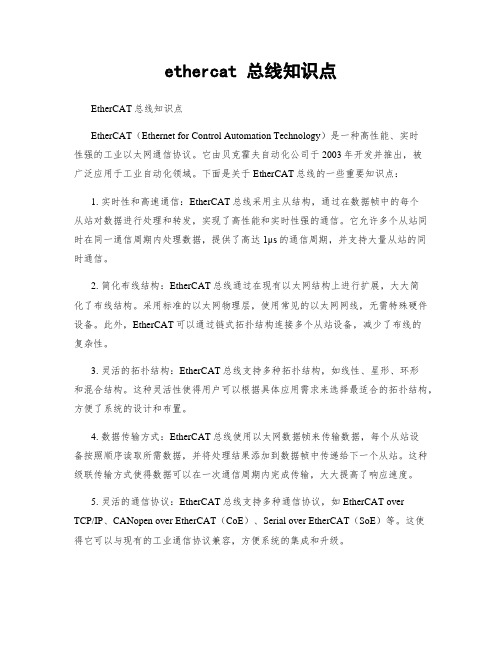
使用Modem的RS-232C接口
计算机 2 3 4 5 6 7 8 20 22 发送数据TxD 接收数据Rx D 请求发送RTS 允许发送CTS 数据装置准备好DSR 信号地GND 载波检测CD 数据终端准备好DTR 振铃指示RI MODEM 2 3 4 5 6 7 8 20 22 MODEM 2 3 4 5 6 7 8 20 22 计算机 2 3 4 5 6 7 8 20 22
Back
Hale Waihona Puke NextHome3
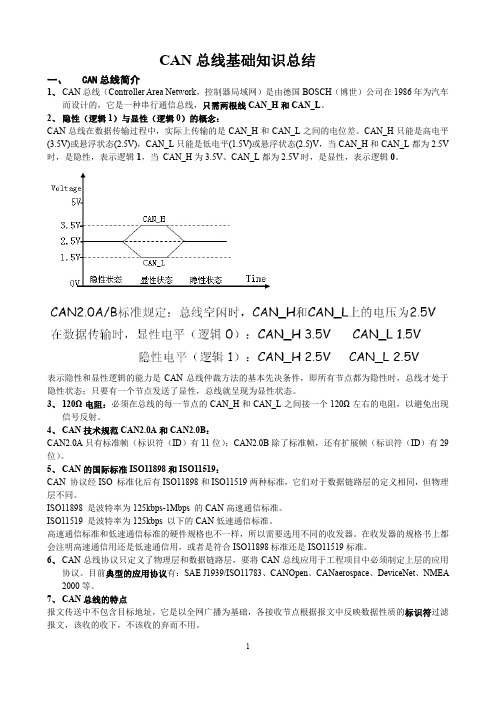
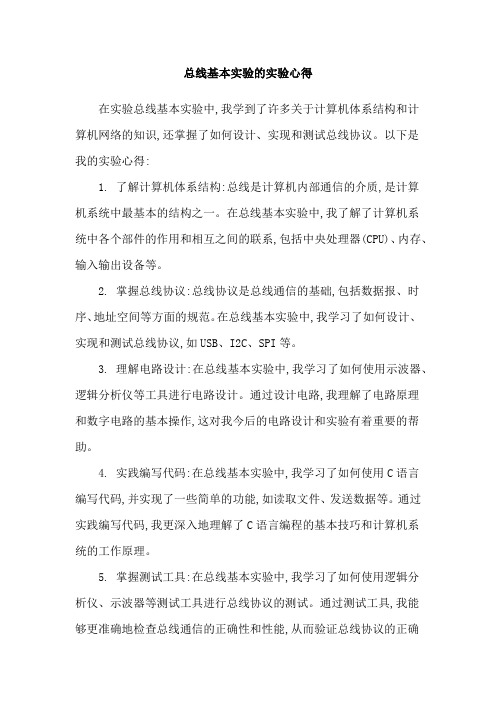
PCI总线的基本连接方式
CPU CPU 总 线 存 储 控制 器 存 储 器 PCI 桥 路 PCI 桥 路
标 准 总线 桥 路
设 备
设 备
设 备
标 准 总线 ( ISA ,EIS A … ) 设 备
Back
Next
Home
4
3. PCI总线的地址空间
在PCI总线中,存在3种地址空间: MEMORY空间、I/O空间、配置空间
6
4. AGP总线
AGP(加速图形端口)是Intel为高性能图形 和视频支持而专门设计的一种新型总线。AGP以 PCI为基础,但在物理上、电气上和逻辑上独立 于PCI。与PCI带有多个插槽的真正总线不同,
can总线知识点梳理
can总线知识点梳理CAN总线是一种串行通信网络,用于实现分布式实时控制。
它是由德国的BOSCH公司开发的,具有传输速度快、通信距离远、无损位仲裁机制、多主结构等优点。
CAN总线标准只规定了物理层和数据链路层,需要用户自定义应用层。
CAN总线采用差分电压传送,使用两条信号线(CAN_H和CAN_L),静态时均为2.5V左右,显性时,通常电压值为:CAN_H=3.5V,CAN_L=1.5V。
在CAN总线中,多个节点连接,只要有一个为低电平,总线就为低电平,只有所有节点输出高电平时,才为高电平。
CAN总线有5个连续相同位后,就插入一个相反位,产生跳变沿,用于同步,从而消除累积误差。
CAN总线的数据帧结构包括帧起始、仲裁段、控制段、数据段、CRC校验段、应答段和帧结束。
其中,仲裁段决定了报文的优先级,ID值越低,优先级越高。
控制段中包含数据长度代码(DLC),表示数据段的长度。
数据段包含发送的数据,可以有0~8个字节。
此外,CAN总线还支持扩展帧和标准帧两种格式,IDE位表示帧类型(0为标准帧,1为扩展帧),RTR位表示帧类型(0为数据帧,1为远程帧)。
在实际应用中,MCU负责实现对功能电路和CAN控制器的控制,包括初始化CAN控制器参数、通过CAN控制器读取和发送CAN 帧、处理CAN控制器的中断异常、根据接收到的数据输出控制信号等。
同时,接口管理逻辑解释MCU指令,寻址CAN控制器中的各功能模块的寄存器单元,向主控制器提供中断信息和状态信息。
在具体的CAN应用场景中,如汽车行业,现在每一辆汽车上都装有CAN总线。
同时,为了实现不同的功能,不同的CAN标准仅物理层不同,而应用层协议也有多种选择,如CANOpen、DeviceNet、J1939、iCAN等。
CAN总线基础知识总结(建议收藏)

CAN总线基础知识总结(建议收藏)CAN总线基础知识总结一、CAN总线简介1、CAN总线(Controller Area Network,控制器局域网)是由德国BOSCH(博世)公司在1986年为汽车而设计的,它是一种串行通信总线,只需两根线CAN_H和CAN_L。
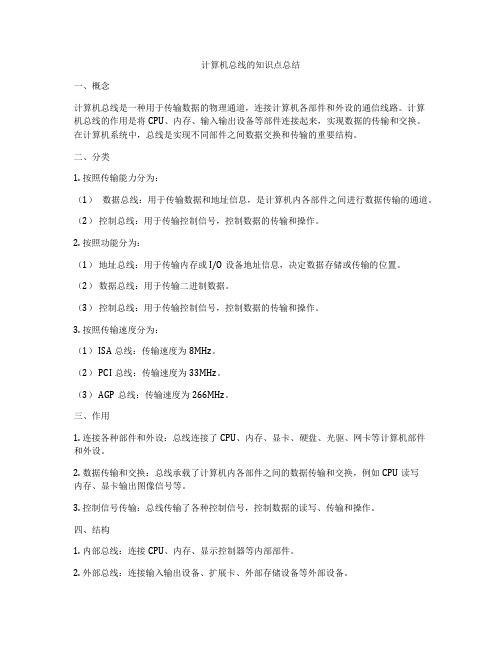
2、隐性(逻辑1)与显性(逻辑0)的概念:CAN总线在数据传输过程中,实际上传输的是CAN_H和CAN_L 之间的电位差。
CAN_H只能是高电平(3.5V)或悬浮状态(2.5V),CAN_L只能是低电平(1.5V)或悬浮状态(2.5)V,当CAN_H和CAN_L 都为2.5V 时,是隐性,表示逻辑1,当CAN_H为3.5V、CAN_L都为2.5V时,是显性,表示逻辑0。
表示隐性和显性逻辑的能力是CAN总线仲裁方法的基本先决条件,即所有节点都为隐性时,总线才处于隐性状态;只要有一个节点发送了显性,总线就呈现为显性状态。
3、120?电阻:必须在总线的每一节点的CAN_H和CAN_L之间接一个120?左右的电阻,以避免出现信号反射。
4、CAN技术规范CAN2.0A和CAN2.0B:CAN2.0A只有标准帧(标识符(ID)有11位);CAN2.0B除了标准帧,还有扩展帧(标识符(ID)有29位)。
5、CAN的国际标准ISO11898和ISO11519:CAN 协议经ISO 标准化后有ISO11898和ISO11519两种标准,它们对于数据链路层的定义相同,但物理层不同。
ISO11898 是波特率为125kbps-1Mbps 的CAN高速通信标准。
ISO11519 是波特率为125kbps 以下的CAN低速通信标准。
高速通信标准和低速通信标准的硬件规格也不一样,所以需要选用不同的收发器。
在收发器的规格书上都会注明高速通信用还是低速通信用,或者是符合ISO11898标准还是ISO11519标准。
6、CAN总线协议只定义了物理层和数据链路层,要将CAN总线应用于工程项目中必须制定上层的应用协议。
计算机总线3篇
计算机总线第一篇:计算机总线的基础知识计算机总线指的是用于数据传输的一组电气信号线,是计算机内部各种硬件设备之间传输信息的通路。
计算机总线分为系统总线、输入输出总线和扩展总线三大类。
系统总线是连接计算机中央处理器(CPU)和随机存取存储器(RAM)之间的数据和控制信号传输线。
它由三类线路组成:数据线、地址线、控制线。
数据线用于传送数据,地址线用于传送RAM中存储单元的地址,控制线用于传送CPU对RAM的读写控制信号。
系统总线的传输速率是由CPU主频和总线位宽共同决定的,通常称作总线带宽。
输入输出总线是用于连接计算机输入输出设备和CPU的信号线路。
通过输入输出总线,计算机和打印机、鼠标、键盘等外设可以进行数据交换和数据控制。
扩展总线则是一种可供用户扩展计算机功能的总线。
在计算机体系结构中,扩展总线采用插卡的形式,用户可以通过插卡的方式扩展计算机的功能。
例如扩展显卡、声卡等。
总的来说,计算机总线是计算机内部各种硬件设备之间传输信息的通路。
它可以分为系统总线、输入输出总线和扩展总线三类,每一类总线都起着独特的作用。
在计算机的使用中,我们需要对计算机总线有相关的了解,以便更好地使用计算机。
第二篇:计算机总线的分类与功能计算机总线是计算机内部各种硬件设备之间传输信息的通路,分为系统总线、输入输出总线和扩展总线三类。
(1)系统总线系统总线是计算机内部各种硬件设备之间进行数据和控制信号传输的通路。
系统总线包含数据线、地址线和控制线这三类线路。
其中,数据线用于传送数据,地址线用于传送RAM中存储单元的地址,控制线用于传送CPU对RAM的读写控制信号。
系统总线的传输速率受CPU主频和总线位宽影响,通常称作总线带宽。
(2)输入输出总线输入输出总线是计算机内部连接各种输入输出设备和CPU 的信号线路。
通过输入输出总线,计算机可以和打印机、鼠标、键盘等外设进行数据交换和数据控制。
输入输出总线的传输速率取决于具体的接口标准和外设类型,如USB、PS/2等。
CAN总线基础知识总结(建议收藏)
CAN总线基础知识总结一、CAN总线简介1、CAN总线(Controller Area Network,控制器局域网)是由德国BOSCH(博世)公司在1986年为汽车而设计的,它是一种串行通信总线,只需两根线CAN_H和CAN_L。
2、隐性(逻辑1)与显性(逻辑0)的概念:CAN总线在数据传输过程中,实际上传输的是CAN_H和CAN_L之间的电位差。
CAN_H只能是高电平(3.5V)或悬浮状态(2.5V),CAN_L只能是低电平(1.5V)或悬浮状态(2.5)V,当CAN_H和CAN_L都为2.5V 时,是隐性,表示逻辑1,当 CAN_H为3.5V、CAN_L都为2.5V时,是显性,表示逻辑0。
表示隐性和显性逻辑的能力是CAN总线仲裁方法的基本先决条件,即所有节点都为隐性时,总线才处于隐性状态;只要有一个节点发送了显性,总线就呈现为显性状态。
3、120Ω电阻:必须在总线的每一节点的CAN_H和CAN_L之间接一个120Ω左右的电阻,以避免出现信号反射。
4、CAN技术规范CAN2.0A和CAN2.0B:CAN2.0A只有标准帧(标识符(ID)有11位);CAN2.0B除了标准帧,还有扩展帧(标识符(ID)有29位)。
5、CAN的国际标准ISO11898和ISO11519:CAN 协议经ISO 标准化后有ISO11898和ISO11519两种标准,它们对于数据链路层的定义相同,但物理层不同。
ISO11898 是波特率为125kbps-1Mbps 的CAN高速通信标准。
ISO11519 是波特率为125kbps 以下的CAN低速通信标准。
高速通信标准和低速通信标准的硬件规格也不一样,所以需要选用不同的收发器。
在收发器的规格书上都会注明高速通信用还是低速通信用,或者是符合ISO11898标准还是ISO11519标准。
6、CAN总线协议只定义了物理层和数据链路层,要将CAN总线应用于工程项目中必须制定上层的应用协议。
计算机总线的知识点总结
计算机总线的知识点总结一、概念计算机总线是一种用于传输数据的物理通道,连接计算机各部件和外设的通信线路。
计算机总线的作用是将CPU、内存、输入输出设备等部件连接起来,实现数据的传输和交换。
在计算机系统中,总线是实现不同部件之间数据交换和传输的重要结构。
二、分类1. 按照传输能力分为:(1)数据总线:用于传输数据和地址信息,是计算机内各部件之间进行数据传输的通道。
(2)控制总线:用于传输控制信号,控制数据的传输和操作。
2. 按照功能分为:(1)地址总线:用于传输内存或I/O设备地址信息,决定数据存储或传输的位置。
(2)数据总线:用于传输二进制数据。
(3)控制总线:用于传输控制信号,控制数据的传输和操作。
3. 按照传输速度分为:(1) ISA总线:传输速度为8MHz。
(2) PCI总线:传输速度为33MHz。
(3) AGP总线:传输速度为266MHz。
三、作用1. 连接各种部件和外设:总线连接了CPU、内存、显卡、硬盘、光驱、网卡等计算机部件和外设。
2. 数据传输和交换:总线承载了计算机内各部件之间的数据传输和交换,例如CPU读写内存、显卡输出图像信号等。
3. 控制信号传输:总线传输了各种控制信号,控制数据的读写、传输和操作。
四、结构1. 内部总线:连接CPU、内存、显示控制器等内部部件。
2. 外部总线:连接输入输出设备、扩展卡、外部存储设备等外部设备。
五、总线标准1. ISA总线:Industry Standard Architecture,是IBM PC/AT计算机使用的一种总线标准,传输速度为8MHz。
2. PCI总线:Peripheral Component Interconnect,是一种计算机内部总线标准,传输速度为33MHz。
3. AGP总线:Accelerated Graphics Port,用于连接显卡的总线标准,传输速度为266MHz。
4. USB总线:Universal Serial Bus,是一种用于连接外部设备的总线标准,传输速度可达5Gbps。
总结归纳总线的分类

总结归纳总线的分类在计算机科学领域中,总线(bus)是一种连接计算机内部各个功能模块的物理通道。
它作为数据传输和通信的基础,起到连接、传递和协调各个硬件组件的作用。
总线的分类主要基于传输方式、功能以及连接的设备类型。
本文将从这三个方面来总结归纳总线的分类。
一、根据传输方式的分类1. 并行总线并行总线是指通过多条数据线同时传输数据的总线。
它能够同时传输多个比特位,速度较快,但受到线缆长度限制,容易产生干扰和噪音。
并行总线适用于近距离通信,常见的应用有IDE总线和PCI总线。
2. 串行总线串行总线是指通过单条数据线依次传输数据的总线。
它通过逐位传输数据,并通过一系列协议进行控制。
串行总线传输速度相对较慢,但可以使用较长的线缆,并能够更好地抵抗干扰。
常见的串行总线有USB总线和SATA总线。
二、根据功能的分类1. 数据总线数据总线用于传输数据信息。
它是计算机内部各个部件之间传递数据的通道,负责传送指令、地址和数据等信息。
数据总线的宽度决定了一次可以传输的比特数目,宽度越大,数据传输速度越快。
2. 地址总线地址总线用于传输访问存储器或者其他设备时的地址信息。
它的宽度决定了可寻址的内存空间大小,地址总线宽度为n位,则可寻址的内存空间大小为2^n字节。
3. 控制总线控制总线用于传输控制信号和命令,控制各个部件的工作状态和数据传输过程。
控制总线包括读写控制、中断请求、设备选择等信号。
三、根据连接的设备类型的分类1. 内部总线内部总线用于连接计算机内部各个组件,如处理器、内存和硬盘等。
它通过内部总线进行数据和控制信号的交互,保证各个组件的正常工作。
2. 外部总线外部总线用于连接计算机与外部设备的数据传输。
它允许计算机和外部设备进行数据交换和通信,如显示器、鼠标、键盘和打印机等。
综上所述,根据传输方式、功能以及连接的设备类型,总线可以分为并行总线和串行总线、数据总线、地址总线和控制总线、内部总线和外部总线等不同类型。
关于总线接口学习心得

关于总线接口学习心得这几天一直在学习总线接口问题,使我在这些总线接口的理论学习上有了很大的提高,虽说现在还没有自己的思想,只能按着书本上的理论照搬,但我感觉还是学习到很多以前上课没有学习到的(主要是上课不认真吧,把老师教的都还给老师了)。
在此感谢艾德才所编著的《微机原理与接口技术》。
GPIO原理与结构GPIO是I/O的最基本形式,它是一组输入引脚或输出引脚,通常有两个控制器:数据方向寄存器和数据寄存器。
数据方向寄存器设置端口的方向,如果引脚设置为输出,那么数据寄存器控制着引脚状态,若引脚设置为输入,则此引脚由引脚上的逻辑店里层来实现对它的控制。
以sumsung公司的S3C2410嵌入式微处理器为列,S3C2410因其数据只能顺序访问linux字符设备,设备的file_operation结构定义如下:Struct file_operation S3C2410_gpio_fops={Read: S3C2410_gpio_read,Write: S3C2410_gpio_write,Open: S3C2410_gpio_open,Release: S3C2410_gpio_release,Ioctl: S3C2410_gpio_ioctl,Close: S3C2410_gpio_close,}键盘接口键盘的两种形式:线性键盘和矩阵键盘。
识别键盘上的比克键盘通常有两种方法:行扫描和行反转法。
行扫描法是矩阵最常见的方法:分两步操作。
1.识别键盘上哪一列的键被按下,让所有行线均为低电平,查询各列线电平是否为低,如果有列线为低,则说明该列有键按下,否则,没有键按下2.如果某列按键列下,识别哪一行按下,逐行置低电平,并置其余各行为高电平,查询各列的变化,如果列电平为低电平,则可确定此行此列处按键被按下。
键盘作为输入接口,实际上是用的非常多的,认真弄懂键盘接口,是非常有必要的!!!!串行接口(1)串行通信是指使数据一位一位地进行出书而实现的通信,与并行通信相比,串行通信具有传输线烧,成本低,特别适合远距离传输。
关于总线的总结
关于总线的总结单机上的系统总线总线(bus)是⼀种通信系统,⽤于携带各种类型的数据,在各组件之间传递数据(可以理解为快递员。
按照bus的字⾯意思理解更好,公共汽车,公共的携带数据的交通⼯具)。
在⼤概念上分三种总线:系统总线(前端总线)、内部总线和外部总线。
系统总线:计算机内部主要设备之间的连接。
内部总线:直接或⼏乎直接和CPU相连的设备之间的连接总线,⽐如STAT、PCI-E。
外部总线:也称扩展总线,离CPU较远的外部设备(如打印机/USB)连接到计算机进⾏通信的总线。
系统总线:包含控制总线、数据总线、地址总线。
也称为前端总线。
地址总线:携带了处理器和内存之间通信的地址。
⽐如要指定从内存中哪个地址处访问数据。
32地址总线的宽度决定了可寻址的范围⼤⼩。
例如32位地址总线可寻址的范围⼤⼩为2(4,294,967,296)字节,即4G⼤⼩。
数据总线:携带了处理器和内存单元、IO设备之间传输的数据。
⽤于传输数据。
数据总线的宽度决定了总线上⼀次性能传输的数据量,它直接影响计算机的性能。
例如64位数据总线⼀次性能传输64⽐特,即8字节数据。
⽽8位数据总线⼀次只能传输1字节数据,所以在数据传输上它的性能⽐64位差8倍。
地址总线和数据总线的宽度可以不⼀样,⽽且通常数据总线的宽度要⼤于地址总线宽度,这样可以⼀次性多传输⼀点数据控制总线:携带了CPU发出的控制信号或其它设备反馈给CPU的状态信号,以便控制和协调计算机中各设备的活动传输CPU发出的控制信号,⽐如告诉内存要执⾏什么操作(read、write或其它?)还传输⼀些其它设备反馈给CPU的状态信号,⽐如ACK。
例如内存写数据完成后,将发送⼀个ACK信号告诉CPU完成写⼊操作前端总线:CPU就是通过前端总线(FSB)连接到北桥芯⽚,进⽽通过北桥芯⽚和内存、显卡交换数据。
北桥芯⽚负责联系内存、显卡等数据吞吐量最⼤的部件,并和南桥芯⽚连接。
前端总线是CPU和外界交换数据的最主要通道,因此前端总线的数据传输能⼒对计算机整体性能作⽤很⼤,如果没⾜够快的前端总线,再强的CPU也不能明显提⾼计算机整体速度。
ethercat 总线知识点
ethercat 总线知识点EtherCAT总线知识点EtherCAT(Ethernet for Control Automation Technology)是一种高性能、实时性强的工业以太网通信协议。
它由贝克霍夫自动化公司于2003年开发并推出,被广泛应用于工业自动化领域。
下面是关于EtherCAT总线的一些重要知识点:1. 实时性和高速通信:EtherCAT总线采用主从结构,通过在数据帧中的每个从站对数据进行处理和转发,实现了高性能和实时性强的通信。
它允许多个从站同时在同一通信周期内处理数据,提供了高达1μs的通信周期,并支持大量从站的同时通信。
2. 简化布线结构:EtherCAT总线通过在现有以太网结构上进行扩展,大大简化了布线结构。
采用标准的以太网物理层,使用常见的以太网网线,无需特殊硬件设备。
此外,EtherCAT可以通过链式拓扑结构连接多个从站设备,减少了布线的复杂性。
3. 灵活的拓扑结构:EtherCAT总线支持多种拓扑结构,如线性、星形、环形和混合结构。
这种灵活性使得用户可以根据具体应用需求来选择最适合的拓扑结构,方便了系统的设计和布置。
4. 数据传输方式:EtherCAT总线使用以太网数据帧来传输数据,每个从站设备按照顺序读取所需数据,并将处理结果添加到数据帧中传递给下一个从站。
这种级联传输方式使得数据可以在一次通信周期内完成传输,大大提高了响应速度。
5. 灵活的通信协议:EtherCAT总线支持多种通信协议,如EtherCAT overTCP/IP、CANopen over EtherCAT(CoE)、Serial over EtherCAT(SoE)等。
这使得它可以与现有的工业通信协议兼容,方便系统的集成和升级。
总结起来,EtherCAT总线具有高性能、实时性强、灵活的拓扑结构和通信协议等优势,被广泛应用于工业自动化领域。
它不仅简化了布线结构,提高了通信效率,还为工业控制系统的设计和维护带来了便利。
CAN总线基础知识学习笔记

CAN总线基础知识学习笔记依照瑞萨公司的《CAN入门书》的组织思路来学习CAN通信的相关知识,并结合网上相关资料以及学习过程中的领悟整理成笔记。
好记性不如烂笔头,加油!1 CAN的一些基本概念1.1 什么是CAN总线CAN 是Controller Area Network 的缩写,是ISO 国际标准化的串行通信协议。
通俗来讲,CAN总线就是一种传输数据的线,用于在不同的ECU之间传输数据。
CAN总线有两个ISO国际标准:ISO11898 和ISO11519。
其中:ISO11898 定义了通信速率为125 kbps~1 Mbps 的高速CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度≤40米。
ISO11519 定义了通信速率为10~125 kbps 的低速CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米。
Tips: :又称为总线的通信速率,指的是位速率。
或称为比特率(和波特率不是一回事),表示的是:单位时间内,通信线路上传输的二进制位的数量,其基本单位是bps 或者b/s (bit per second)。
1.2 CAN的拓扑结构下图中,左边是高速CAN总线的拓扑结构,右边是低速CAN总线的拓扑结构。
如图中所示,CAN总线包括CAN_H 和CAN_L 两根线。
节点通过CAN控制器和CAN 收发器连接到CAN总线上。
TIps :通常来讲,ECU内部集成了CAN控制器和CAN收发器,但是也有没集成的,需要自己外加。
1.3 CAN信号表示在CAN总线上,利用CAN_H和CAN_L两根线上的电位差来表示CAN信号。
CAN总线上的电位差分为显性电平和隐性电平。
其中显性电平为逻辑0,隐性电平为逻辑1。
ISO11898标准(125kbps ~ 1Mbps)和ISO11519标准(10kbps ~ 125kbps)中CAN信号的表示分别如下所示:1.4 CAN信号传输发送过程: CAN控制器将CPU传来的信号转换为逻辑电平(即逻辑0-显性电平或者逻辑1-隐性电平)。
CAN总线相关知识点归纳(1)

CAN总线相关知识点归纳I概述CAN (Controller Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。
想到CAN就要想到德国的Bosch公司,因为CAN就是这个公司开发的(和Intel) CAN 有很多优秀的特点,使得它能够被广泛的应用。
比如:传输速度最高到IMbps, 通信距离最远到IOkm,无损位仲裁机制,多主结构。
近些年来,CAN控制器价格越来越低,很多MeU也集成了CAN控制器。
现在每一辆汽车上都装有CAN总线。
一个典型的CAN应用场景:y∙7:7、行电机・控制第〃接近开关“s光电开关1信号调理模块I CAN总线标准CAN总线标准只规定了物理层和数据链路层,需要用户自定义应用层。
不同的CAN 标准仅物理层不同。
CAN收发器负责逻辑电平和物理信号之间的转换。
将逻辑信号转换成物理信号(差分电平),或者将物理信号转换成逻辑电平。
CAN 标准有两个,即IoSII898和K)SII519,两者差分电平特性不同。
ISOII898高速CAN电平高低电平幅度低,对应的传输速度快;物理层CAN有三种接口器件多个节点连接,只要有一个为低电平,总线就为低电平,只有所有节点输出高电平时,才为高电平。
所谓〃线与〃。
CAN 总线有5个连续相同位后,就插入一个相反位,产生跳变沿,用于同步。
从 而消除累积误差。
和485、232 一样,CAN 的传输速度与距离成反比。
因为电缆的特性阻抗为120。
,为了模拟无限远的传输线数据链路层CAN 总线传输的是CAN 帧,CAN 的通信帧分成五种,分别为数据帧、远程帧、 错误帧、过载帧和帧间隔。
数据帧用来节点之间收发数据,是使用最多的帧类型;远程帧用来接收节点向发 送节点接收数据;错误帧是某节点发现帧错误时用来向其他节点通知的帧;过载 帧是接收节点用来向发送节点告知自身接收能力的帧;用于将数据帧、远程帧与 前面帧隔离的帧。
数据帧根据仲裁段长度不同分为标准帧(2. OA)和扩展帧(2. OB)帧起始低速 CAN-bus 终端电阻接法高速CAN∙bus 终端电阻接法为什么是120 Ω, 使线路阻抗连续,信号波形完帧起始由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧 起始;帧结束由7个隐形位(高电平)组成。
总线基本实验的实验心得
总线基本实验的实验心得
在实验总线基本实验中,我学到了许多关于计算机体系结构和计
算机网络的知识,还掌握了如何设计、实现和测试总线协议。
以下是
我的实验心得:
1. 了解计算机体系结构:总线是计算机内部通信的介质,是计算
机系统中最基本的结构之一。
在总线基本实验中,我了解了计算机系
统中各个部件的作用和相互之间的联系,包括中央处理器(CPU)、内存、输入输出设备等。
2. 掌握总线协议:总线协议是总线通信的基础,包括数据报、时序、地址空间等方面的规范。
在总线基本实验中,我学习了如何设计、实现和测试总线协议,如USB、I2C、SPI等。
3. 理解电路设计:在总线基本实验中,我学习了如何使用示波器、逻辑分析仪等工具进行电路设计。
通过设计电路,我理解了电路原理
和数字电路的基本操作,这对我今后的电路设计和实验有着重要的帮助。
4. 实践编写代码:在总线基本实验中,我学习了如何使用C语言
编写代码,并实现了一些简单的功能,如读取文件、发送数据等。
通过实践编写代码,我更深入地理解了C语言编程的基本技巧和计算机系
统的工作原理。
5. 掌握测试工具:在总线基本实验中,我学习了如何使用逻辑分
析仪、示波器等测试工具进行总线协议的测试。
通过测试工具,我能
够更准确地检查总线通信的正确性和性能,从而验证总线协议的正确
性和可靠性。
总线基本实验对我的学习和成长有着重要的帮助。
通过实验,我不仅掌握了计算机体系结构、总线协议和电路设计等基础知识,还能够编写和测试代码,提高编程能力和测试技能。
CAN基础知识3篇

CAN基础知识第一篇:CAN总线介绍及基本特性CAN(Controller Area Network)总线,是一种串行通信总线,广泛应用于建筑自动化、工业自动化、汽车电子和其他控制领域。
CAN总线的优势在于其高速性、高可靠性和实时性能。
本文将介绍CAN总线的基本特性,包括CAN的基本架构、CAN的帧格式和通讯协议、CAN的通讯速率和传输距离,以及常用的CAN总线标准和应用场景。
1. CAN总线架构CAN总线的基本架构由控制器、节点、总线和转换器组成。
其中,控制器负责CAN通讯协议的实现,节点通过总线与控制器进行通讯,并根据通讯协议执行相应的功能。
总线是连接控制器和节点的传输介质,通常采用双绞线作为传输介质,以保证传输信号的可靠性。
转换器主要负责将CAN总线转换为其他串行通讯协议或者其他传输介质。
2. CAN帧格式和通讯协议CAN总线通讯采用基于帧的数据传输方式,每一帧包含一个控制帧和若干个数据帧。
控制帧用于驱动CAN总线工作,包含开始、结束、错误等信息,数据帧用于传输节点之间的数据。
CAN总线通讯协议采用事件驱动机制,控制帧在总线上产生中断事件,通知节点进行相应的操作。
节点产生数据帧时,需要先向控制器进行请求,控制器则决定该帧是否能够传输。
3. CAN总线通讯速率和传输距离CAN总线通讯速率通常在1Mbps到1Kbps之间,不同的CAN总线标准也有所不同。
例如,CAN2.0B标准规定了1Mbps和500Kbps两种通讯速率。
CAN总线的传输距离基于总线的负载和传输介质的质量而定,一般而言,CAN总线的传输距离约为40m至500m之间。
4. CAN总线标准和应用场景目前常用的CAN总线标准有CAN 2.0A、CAN 2.0B、CAN FD等。
CAN 2.0A和CAN 2.0B协议是基于11位标识符的,而CAN FD协议则支持29位标识符和更高的带宽传输。
CAN总线广泛应用于汽车电子、建筑自动化、工业自动化等领域。
总线技术知识大盘点:总线的原理、分类及技术指标你知道多少呢?-基础电子

总线技术知识大盘点:总线的原理、分类及技术指标你知道多少呢?-基础电子1. 总线基础总线(Bus)是计算机各种功能部件之间传送信息的公共通信干线,它是由导线组成的传输线束,按照计算机所传输的信息种类,计算机的总线可以划分为数据总线、地址总线和控制总线,分别用来传输数据、数据地址和控制信号。
总线是一种内部结构,它是CPU、内存、输入、输出设备传递信息的公用通道,主机的各个部件通过总线相连接,外部设备通过相应的接口电路再与总线相连接,从而形成了计算机硬件系统。
在计算机系统中,各个部件之间传送信息的公共通路叫总线,微型计算机是以总线结构来连接各个功能部件的。
2. 总线的工作原理当总线空闲(其他器件都以高阻态形式连接在总线上)且一个器件要与目的器件通信时,发起通信的器件驱动总线,发出地址和数据。
其他以高阻态形式连接在总线上的器件如果收到(或能够收到)与自己相符的地址信息后,即接收总线上的数据。
发送器件完成通信,将总线让出(输出变为高阻态)。
3. 总线的分类A. 按功能和规范分。
图1三类总线在微机系统中的地位和关系(1)片总线(Chip Bus,C-Bus)又称元件级总线,是把各种不同的芯片连接在一起构成特定功能模块(如CPU模块)的信息传输通路,它的宽度可以是8、16、32或64位。
目前比较流行的几种内部总线技术:I2C总线、SCI总线等。
(2)内总线(Internal Bus,I-Bus)又称系统总线或板级总线,是微机系统中各插件(模块)之间的信息传输通路。
例如CPU模块和存储器模块或I/O接口模块之间的传输通路。
常用的有PC总线、AT总线(ISA总线)、PCI总线等。
(3)外总线(External Bus,E-Bus)又称通信总线,是微机系统之间或微机系统与其他系统(仪器、仪表、控制装置等)之间信息传输的通路,如EIA RS-232C、IEEE-488等。
其中的系统总线,即通常意义上所说的总线,一般又含有三种不同功能的总线,即数据总线DB、地址总线AB和控制总线CB。
关于计组中总线的知识点总结

关于计组中总线的知识点总结《关于计组中总线的知识点总结》整体感受:想起学习计算机组成中的总线这部分知识,感觉就像是在探索一座庞大建筑里复杂的管道系统。
一开始有点晕头转向,但越深入越觉得妙趣横生。
具体收获:首先就是总线的概念了,它就像是信息的高速公路,连接着计算机各个部件,让数据、地址和控制信号能够在不同部件之间来回穿梭。
比如说,在电脑中CPU和内存、硬盘这些部件要通信,就得靠总线这个中间人。
数据总线负责传输数据,就像是运货的卡车,不同宽度的数据总线能载的数据量也不一样,像8位数据总线一次能运送8个比特的数据。
地址总线呢,像是寄送快递时的地址,它用来确定数据在存储器或者I/O设备中的位置,地址总线的线数决定了可寻址的范围。
控制总线就像交通信号灯,控制着数据传输的方向、何时开始传输等等操作。
重要发现:等等,还有个重要的点。
在总线传输过程中,有同步和异步的区别。
同步传输就像是整齐划一的军队行军,信号传输按照固定的时钟节拍,这样各部件间协调很方便,但是受时钟频率限制得多。
异步传输就更灵活一点,类似个人根据自己的节奏做事,各部件之间相互确认状态之后再进行数据传输,虽然复杂些但是适应性强。
还有一个发现就是,总线传输的带宽这个概念很重要,它反映了总线在单位时间内能够传输的数据量。
原来如此,这就好比一条公路,带宽大就像宽阔的多车道公路,能同时让很多车辆(数据)通过。
反思:回想起来才发现自己当初学习的时候在一些概念理解上有些粗糙。
比如在弄清楚不同类型总线功能的时候,只是机械性的记忆,没有真正去思考为什么要有这样的功能分配。
这样在做复杂系统涉及到多个部件交互通信的时候就有点迷糊,不能将实际问题快速和总线这些知识联系起来。
这方面可能需要在之后加强理解,多做一些实际设备运作与总线联系的思考练习。
总结启示:这部分知识的学习让我明白在学习计组里的概念时不仅仅是要记住,更要理解背后的机理。
每一个部件每一根线所承担的角色都是为了整个计算机系统的高效运行。
can总线知识点
can总线知识点摘要:1.什么是CAN 总线2.CAN 总线的特点3.CAN 总线的工作原理4.CAN 总线的应用领域5.CAN 总线的发展趋势正文:CAN 总线是一种用于实时控制的串行通信总线,它最初由德国的Robert Bosch GmbH 公司于1980 年代开发,用于汽车电子设备的通信。
CAN 总线具有高速、高可靠性、强实时性、成本低等优点,因此在各种自动化控制领域得到了广泛的应用。
CAN 总线的特点主要体现在以下几个方面:首先,它是一种多主控制器的总线结构,这意味着在总线上可以同时存在多个控制器,它们可以平等地发送或接收信息,不存在固定的主从关系。
其次,CAN 总线具有高达1Mbps 的数据传输速率,满足了实时控制系统的需求。
再次,CAN 总线采用了高可靠的错误检测和处理机制,例如奇偶校验、帧校验、应答错误检测等,确保了通信的可靠性。
最后,CAN 总线的成本较低,因为它使用的硬件成本较低,而且现有的许多微控制器都集成了CAN 控制器,使得开发和应用更加方便。
CAN 总线的工作原理是,首先由发送节点将数据帧通过总线发送出去,然后接收节点接收数据帧并进行处理。
在发送过程中,发送节点会根据总线的忙闲状态选择合适的时机发送数据。
在接收过程中,接收节点会对接收到的数据帧进行奇偶校验、帧校验、应答错误检测等错误检测,如果检测到错误,接收节点会向发送节点发送错误帧进行反馈。
CAN 总线的应用领域非常广泛,除了在汽车电子设备中有广泛应用外,还在工业自动化、医疗设备、楼宇自动化、智能交通等领域得到了广泛应用。
随着科技的进步,CAN 总线也在不断发展。
未来的发展趋势包括更高的传输速率、更低的成本、更强的实时性、更好的兼容性等。
can总线知识点

can总线知识点一、Can总线简介1.Can总线的发展历程Can总线(控制器局域网,Controller Area Network)最早由德国的Robert Bosch GmbH公司于1980年代研发,用于汽车电子设备的通信。
随着技术的不断发展,Can总线逐渐成为了一种广泛应用于各个领域的通信协议。
2.Can总线的应用领域Can总线起初主要用于汽车电子设备之间的通信,如发动机控制、刹车系统、仪表盘等。
如今,Can总线已广泛应用于工业自动化、智能建筑、医疗设备、交通运输等多个领域。
二、Can总线的基本原理1.Can总线的通信模式Can总线采用多主通信模式,即网络中的每个节点(设备)都可以主动发送或接收数据,不存在固定的主从关系。
通过这种方式,保证了通信的实时性和高效性。
2.Can总线的数据传输速率Can总线的数据传输速率一般在1Mbps左右,适用于实时性要求较高的场景。
同时,Can总线支持高速、中速和低速三种传输速率,可以根据实际应用需求进行选择。
三、Can总线的硬件结构1.Can控制器Can控制器是Can总线的核心部分,负责处理报文发送、接收、错误检测等功能。
常见的Can控制器有82C200、82C500等。
2.Can总线驱动器Can总线驱动器负责将Can控制器发出的信号转换为实际的电信号,驱动Can总线传输。
常见的Can总线驱动器有TJA1020、MCP2003等。
3.Can总线传输介质Can总线的传输介质主要有两种:一种是双绞线,另一种是光纤。
双绞线传输速率较低,但成本较低;光纤传输速率较高,但成本较高。
四、Can总线的软件协议1.Can总线的报文格式Can总线的报文格式包括起始符、仲裁字段、控制字段、数据字段、CRC 字段、应答位和结束符。
其中,仲裁字段包含了发送优先级,保证了高优先级的消息优先发送。
2.Can总线的通信规则Can总线的通信规则主要包括报文发送、报文接收、错误检测与处理等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SPI总线知识小结
同步外设接口(SPI)是由摩托罗拉公司开发的全双工同步串行总线,该总线大量用在与EEPROM、ADC、FRAM和显示驱动器之类的慢速外设器件通信。
SPI(Serial Peripheral Interface)是一种串行同步通讯协议,由一个主设备和一个或多个从设备组成,主设备启动一个与从设备的同步通讯,从而完成数据的交换。
SPI 接口由SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟),CS(从使能信号)四种信号构成,CS 决定了唯一的与主设备通信的从设备,如没有CS 信号,则只能存在一个从设备,主设备通过产生移位时钟来发起通讯。
通讯时,数据由SDO 输出,SDI 输入,数据在时钟的上升或下降沿由SDO 输出,在紧接着的下降或上升沿由SDI 读入,这样经过8/16 次时钟的改变,完成8/16 位数据的传输。
SPI通信
该总线通信基于主-从配置。
它有以下4个信号:
MOSI:主出/从入
MISO:主入/从出
SCK:串行时钟
SS:从属选择
芯片上“从属选择”(slave-select)的引脚数决定了可连到总线上的器件数量。
在SPI传输中,数据是同步进行发送和接收的。
数据传输的时钟基于来自主处理器的时钟脉冲,摩托罗拉没有定义任何通用SPI的时钟规范。
然而,最常用的时钟设置基于时钟极性(CPOL)和时钟相位(CPHA)两个参数,CPOL定义SPI串行时钟的活动状态,而CPHA定义相对于SO-数据位的时钟相位。
CPOL和CPHA的设置决定了数据取样的时钟沿。
数据方向和通信速度
SPI传输串行数据时首先传输最高位。
波特率可以高达5Mbps,具体速度大小取决于SPI硬件。
例如,Xicor公司的SPI串行器件传输速度能达到5MHz。
SPI总线接口及时序
SPI总线包括1根串行同步时钟信号线以及2根数据线。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(C PHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI接口时序如图3、图4所示。
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
假设下面的8位寄存器装的是待发送的数据10101010,上升沿发送、下降沿接收、高位先发送。
那么第一个上升沿来的时候数据将会是sdo=1;寄存器=0101010x。
下降沿到来的时候,sdi上的电平将所存到寄存器中去,那么这时寄存器=01010 10sdi,这样在8个时钟脉冲以后,两个寄存器的内容互相交换一次。
这样就完
这样就完成了两个寄存器8位的交换,上面的上表示上升沿、下表示下降沿,sdi、sdo相对于主机而言的。
其中ss引脚作为主机的时候,从机可以把它拉底被动选为从机,作为从机的是时候,可以作为片选脚用。
根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据主机的名准备数据,主机在下一个8位时钟周期才把数据读回来
SPI 总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于CPU与各种外围器件进行全双工、同步串行通讯。
SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束中断标志;写冲突保护;总线竞争保护等。
图3示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):
图2 SPI总线四种工作方式
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。
时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。
如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。
SPI主模块和与之通信的外设音时钟相位和极性应该一致。
SPI接口时序如图3、图4所示。
二,.SPI功能模块的设计
根据功能定义及SPI的工作原理,将整个IP Core分为8个子模块:uC接口模块、时钟分频模块、发送数据FIFO模块、接收数据FIFO模块、状态机模块、发送数据逻辑模块、接收数据逻辑模块以及中断形式模块。
深入分析SPI的四种传输协议可以发现,根据一种协议,只要对串行同步时钟进行转换,就能得到其余的三种协议。
为了简化设计规定,如果要连续传输多个数据,在两个数据传输之间插入一个串行时钟的空闲等待,这样状态机只需两种状态(空闲和工作)就能正确工作。