旋转变压器与编码器的区别
机床进给伺服系统所用的检测部件主要有旋转变压器和脉冲编码器两种

机床进给伺服系统所用的检测部件主要有旋转变压器和脉冲编码器两种,在全闭环时用作位置检测的还有光栅等。
它们的性能直接影响到伺服系统的性能。
旋转变压器是一种输出电压与角位移量成连续函数关系的感应式微电机。
从物理本质上看,旋转变压器是一种可以转动的变压器。
它由定子和转子组成,其原、副绕组分别放置在定、转子上,原、副绕组之间的电磁耦合程度与转子的转角有关。
因此,当它的原绕组施加单相交流电压励磁时,副绕组输出电压的幅值将与转子转角有关。
旋转变压器有多种分类方法:若按有无电刷来分,可分为接触式和无接触式两种;若按极对数来分,可分为单对极和多对极;若按用途来分,可分为计算用旋转变压器和数据传输用变压器;若按输出电压与转子转角间的函数关系来分,可分为正余弦旋转变压器、线性旋转变压器、比例式旋转变压器以及特殊函数旋转变压器等四类。
脉冲编码器也叫光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前在机床上应用最多的传感器,根据它产生脉冲方式的不同,可分为增量式、绝对式以及混合式三种。
其中增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90º,从而可方便地判断出旋转方向,而Z 相为每转一个脉冲,用于基准点定位。
它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。
其缺点是无法输出轴转动的绝对位置信息。
而绝对式编码器是利用自然二进制或循环二进制(葛莱码)方式进行光电转换的。
它的特点是:①可以直接读出角度坐标的绝对值;②没有累积误差;③电源切除后位置信息不会丢失。
但是分辨率是由二进制的位数来决定的,也就是说精度取决于位数,目前有10位、14位等多种。
而混合式绝对值编码器,它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。
用于机床的位置测量并已得到广泛应用的有光栅、感应同步器、容栅、磁栅、球栅和激光。
编码器杂谈

日本多摩川公司是编码器的专业生产厂家 , 主要 生产旋转变压器 以及增量式 、 绝对式编码器 。 本文 以 日本多摩川公司的旋转变压器 、 增量式编码器和绝对
式编码器为例 , 逐一进行介绍 。
个脉 冲 ,故称为增量式 。多摩川公 司的增 量式编
码器输 出信号有长线输 出、开集输 出、 电压 输 出和 推拉互补输 出四种方式 。按机械 结构 分 ,有 中空轴
流 电压励磁时 ,输 出绕组 的电压幅值 与转 子转角成
绝 对 式 编 码 器
旋转 增量式编码器转 动时输 出脉冲 ,通 过 C U P 计数 可知其位 置 ,当编码器不动或停 电时,依靠计
正余弦函数关系 ,或保持某一 比例 关系,或在一定
转角范 围内与转 角成线性关系 。
数 设备的 内部记பைடு நூலகம்来记住位置 。这样 ,停 电后 ,编
编 码 器 发 展 历 史
早期编码器 主要是指旋转变压器 。 转变压器 旋
I 值高 ,能在 比较恶劣 的环境条件 下工作 。由于 电 P 磁干扰敏感 以及解码复杂等缺点 , 其逐渐退 出市场 , 但是时至今 日, 仍具有特有的价值 。 比如 , 在作为混 合动力汽车 的速度 反馈方面, 作用几乎是不可代替 其 的 此外, 在环 境恶劣的钢铁 行业、 水利水 电行业 , 因 为防护等级高 , 旋转变压器 同样获得 了广泛 的应用 。
维普资讯
R O B O T EC H T Nl
笪垒 叁
越 .
! 叁!!
技 术 摩 用
栏目 丰持
:
刘 远 江
编码器杂谈
[ 要 ] 本文简要介 绍 了E本 多摩 川编码器 、旋 转变压器 的应 用特 点和接 口方法 ,重点介绍 了产 品通 信 摘 t 协议 、硬件接 口电路 以及专用 的接 收芯片 A 5 6 U 5 1应用 方法 。
旋转变压器编码器的工作原理
旋转变压器编码器的工作原理
旋转变压器编码器的工作原理是基于电磁感应原理和变压器原理。
它是一种常见的传感器,用于测量和记录旋转物体的位置、速度和方向。
旋转变压器编码器由两部分组成:固定部分和旋转部分。
固定部分包括一个绕组和一个磁芯,而旋转部分包括一个磁头和一个磁环。
当旋转部分绕着固定部分旋转时,磁头和磁环之间的磁场会发生变化,从而在绕组中引起感应电动势的变化。
具体来说,当旋转部分转动时,磁头和磁环之间的距离会发生变化。
这会导致磁场的强度和方向在绕组中发生变化,进而引起感应电动势的变化。
感应电动势的大小和方向取决于旋转部分的位置和方向。
编码器通过测量感应电动势的变化来确定旋转物体的位置、速度和方向。
通常使用数字输出来表示这些信息。
编码器通常具有一个输出轴和一个编码盘,编码盘会根据旋转部分的位置和方向而旋转。
通过读取编码盘上的编码信号,可以确定旋转物体的具体位置及其旋转方向。
旋转变压器编码器具有很高的精度和可靠性,被广泛应用于自动控制系统、机器人、摄像机云台、工业机械等领域。
它在角度测量、位置反馈和控制系统中发挥着重要作用。
通过使用旋转变压器编码器,工程师可以实时监测和控制旋转物体的运动,从而提高系统的性能和效率。
编码器类型以及应用场合
编码器可以分为以下几种类型:
1.增量式编码器:在旋转时,输出的脉冲信号个数与转过的角度成正比,主
要用于测量旋转速度。
2.绝对值编码器:输出的是绝对位置值,即每个位置是唯一的,不存在误差,
适用于需要测量角度、位置、速度等参数的系统。
3.旋转变压器:是一种测量角度的绝对值编码器,测量精度高,抗抖动干扰
能力强,但同时也存在成本高、体积大、结构复杂、可靠性差等缺点。
4.正弦波编码器:输出的是正弦信号,其抗干扰能力比旋转变压器强,但其
精度和稳定性不如前者。
5.霍尔编码器:是一种光电编码器,具有体积小、重量轻、结构简单、可靠
性高、寿命长等优点,但同时也存在精度低、稳定性差等缺点。
编码器的应用场合如下:
1.速度检测:将编码器和电动机同轴联接,通过测量电动机的旋转速度,就
可以得到编码器的脉冲信号个数,从而计算出电动机的旋转速度。
2.位置控制:在生产线上,需要测量物体的位置,可以使用绝对值编码器来
测量物体的位置。
3.运动控制:在自动化设备中,需要精确控制物体的运动轨迹和运动速度,
可以使用编码器来测量物体的运动轨迹和速度。
4.旋转方向检测:在生产线上,需要检测物体的旋转方向,可以使用旋转变
压器来检测物体的旋转方向。
5.速度反馈:在自动化设备中,需要将物体的运动速度反馈到控制器中,可
以使用编码器来测量物体的运动速度并反馈到控制器中。
旋转变压器分类及接口电路
摘要:本文简要介绍编码器、旋转变压器应用特点和接口方法,其中重点介绍产品通信协议和硬件接口电路以及专用的接收芯片AU5561应用方法。
编码器发展历史早期的编码器主要是旋转变压器,旋转变压器IP值高,能在一些比较恶劣的环境条件下工作,虽然因为对电磁干扰敏感以及解码复杂等缺点而逐渐退出,但是时至今日,仍然有其特有的价值,比如作为混合动力汽车的速度反馈,几乎是不可代替的,此外在环境恶劣的钢铁行业、水利水电行业,旋转变压器因为其防护等级高同样获得了广泛的应用。
随着半导体技术的发展,后来便有霍尔传感器和光电编码器,霍尔传感器精度不高但价格便宜,而且不能耐高温,只适合用在一些低端场合,光电编码器正是由于克服了前面两种编码器的缺点而产生,它精度高,抗干扰能力强,接口简单使用方便因而获得了最广泛的应用。
编码器的生产厂家很多,这里以多摩川的产品为例进行介绍。
下面以旋转变压器、增量式编码器、绝对式编码器为例逐一进行介绍。
旋转变压器简称旋变是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。
用户往往选择BRT型的旋变,因为它易于解码。
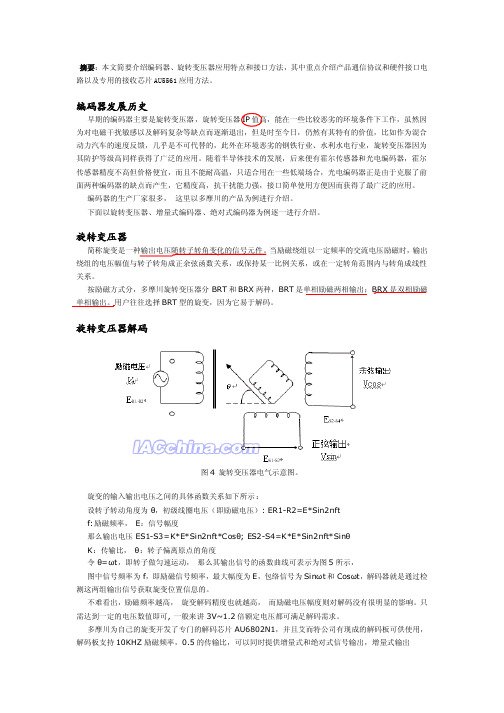
旋转变压器解码图4旋转变压器电气示意图。
旋变的输入输出电压之间的具体函数关系如下所示:设转子转动角度为θ,初级线圈电压(即励磁电压):ER1-R2=E*Sin2πftf:励磁频率,E:信号幅度那么输出电压ES1-S3=K*E*Sin2πft*Cosθ; ES2-S4=K*E*Sin2πft*SinθK:传输比, θ:转子偏离原点的角度令θ=ωt,即转子做匀速运动,那么其输出信号的函数曲线可表示为图5所示,图中信号频率为f,即励磁信号频率,最大幅度为E,包络信号为Sinωt和Cosωt,解码器就是通过检测这两组输出信号获取旋变位置信息的。
旋转变压器解码电路设计
2
Байду номын сангаас 2013 届本科毕业设计论文
目录
第一章 旋转变压器..................................................................................................5
1.2.1 环形变压器式旋转变压器................................................................................... 5 1.2.2 磁阻式旋转变压器............................................................................................... 6 1.3 正余弦旋转变压器的工作原理...................................................................................... 6 1.4 旋转变压器与光学编码器比较...................................................................................... 8 1.5 旋转变压器的应用.......................................................................................................... 9
第三章 控制器 STM32F103RBT6........................................................................ 14
旋变与海德汉的区别

电磁感应原理
直接输出时模拟信号,通过变频器或者我们的解码板出来是A、B信号
定转子分开装配,转子轴向压紧(用螺钉和压板),定子用压板压紧,上螺钉
1024*电机极对数,解码四倍频率后分辨率为4096*电机极对数
单价300-600
适用带reslover接口的变频器,例如国外的有德国科比变频器、意大利西威变频器、德国路斯特变频器等,国内的有蒙德变频器,汇川变频器等等。
产品
原理
输出信号
安装方式
分辨率
价格
适用变频
优点
缺点
海德汉光电编码器(1387、1313)
光栅理
正余弦信号
锥轴方式安装
1024、2048、4096、8192
单价1000-2000
适用带SIN/COS换向信号接口的变频器
记录绝对位置信息,没有累积误差,切除电源后信号不会丢失,高分辨率
恶劣环境下,很容易损坏,不防尘,不防油污,抗振动能力较差,耐温性较差
无刷、无接触,记录相对绝对位置,没有累积误差,切除电源后信号不会丢失,高分辨率、高可靠性,耐高低温,防油污、防尘,抗振动,抗强电磁干扰等
安装不方便,旋变解码卡不好配
旋转变压器与海德汉1387、1313光电编码器的区别
旋变变压器编码器原理
旋变变压器编码器原理
旋变变压器编码器是一种利用旋变变压器实现旋转角度测量的装置。
其原理如下:
1. 旋变变压器是一种特殊的变压器,其一般由一个固定铁芯和一个旋转铁芯组成。
固定铁芯绕制有一组绕组,而旋转铁芯则绕制有另外一组绕组。
2. 当旋转铁芯相对于固定铁芯旋转时,两组绕组之间的磁链的耦合程度会发生改变,从而导致输出电压的变化。
3. 编码器一般通过输入电压和输出电压之间的变化关系,来确定旋转角度。
通过对输出电压进行采样和处理,可以得到旋转铁芯的角度信息。
4. 通常,编码器还会有一个信号处理器,用于处理和解码输出信号,以得到更加精确的旋转角度。
总结起来,旋变变压器编码器利用旋变变压器的磁链耦合变化原理,通过对输出电压的采样和处理,来确定旋转角度信息。
这种编码器具有结构简单、精度高等优点,广泛应用于机械、电子等领域中需要测量旋转角度的场合。
电机旋变测量方法
电机旋变测量方法
电机旋变测量方法主要有以下几种:
1.霍尔传感器法:霍尔传感器是一种特殊的半导体器件,内部装有三个与电机转子位置有关的磁敏元件(即重尔元件),可以实时监测转子位置。
当磁敏元件受到磁场影响时,会铲生电势差,经过放大、滤波、调整等处理后,可以获得精准的转子位置信号。
这种方法测虽精度高,信噪比较好,适用于多种类型的电机,尤其适用于小型电机和高速电机。
2.编码器法:编码器是-种光、电信号交替的数字转换器,可以将旋转角度转化为脉冲信号,通过计数脉冲数,可以了解电机转子的位置和转速。
编码器-般以磁性编码器和光电编码器两种为主。
磁性编码器的优点是抗干扰能力较好,脉冲数可以比较高,但是同步误差大,同时运行温度范围小。
光电编码器的优点是精度高,同步误差小,运行温度范围大,但是抗扰能力相对较差。
这种方法适用于大型电机和复杂电机的测量,精度高,运行稳定。
3.静态测量:这种方法在国内应用最广,它只需要-台直流电源和- 一个旋变的解算装置即可对零。
通常的做法是先对电机绕组通一低压直流电,U相接正,V相或VW相接负,此时电机转子会被拉倒一个固定位置。
比如UVW接法时转子理论电角度为0°。
读取此时旋变解算角度值就是旋变与电机的零位偏差。
这些方法各有优缺点,适用范围也不尽相同,具体应用哪种方法要根据电机和实际需求进行选择。
光电与旋变编码器的区别
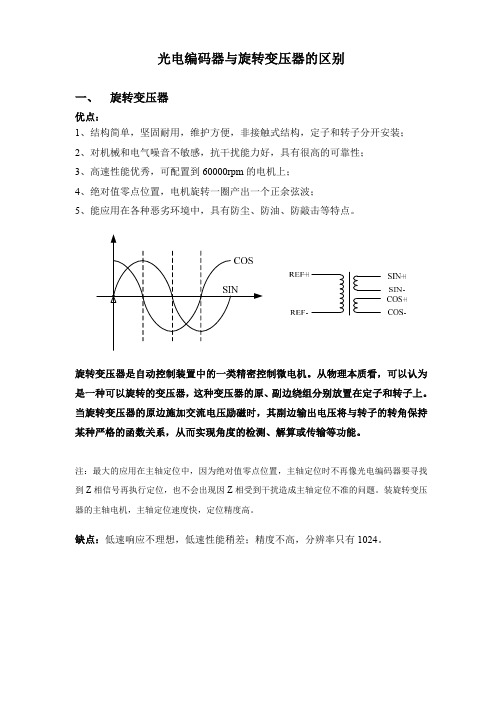
光电编码器与旋转变压器的区别一、 旋转变压器优点:1、结构简单,坚固耐用,维护方便,非接触式结构,定子和转子分开安装;2、对机械和电气噪音不敏感,抗干扰能力好,具有很高的可靠性;3、高速性能优秀,可配置到60000rpm的电机上;4、绝对值零点位置,电机旋转一圈产出一个正余弦波;5、能应用在各种恶劣环境中,具有防尘、防油、防敲击等特点。
旋转变压器是自动控制装置中的一类精密控制微电机。
从物理本质看,可以认为是一种可以旋转的变压器,这种变压器的原、副边绕组分别放置在定子和转子上。
当旋转变压器的原边施加交流电压励磁时,其副边输出电压将与转子的转角保持某种严格的函数关系,从而实现角度的检测、解算或传输等功能。
注:最大的应用在主轴定位中,因为绝对值零点位置,主轴定位时不再像光电编码器要寻找到Z相信号再执行定位,也不会出现因Z相受到干扰造成主轴定位不准的问题。
装旋转变压器的主轴电机,主轴定位速度快,定位精度高。
缺点:低速响应不理想,低速性能稍差;精度不高,分辨率只有1024。
旋转变压器角度位置伺服控制系统S2S1S4S3S2S1S4S3XB变速齿轮上图是一个比较典型的角度位置伺服控制系统框图永磁交流同步伺服电动机速度控制系统框图B A 旋转变压器的结构根据转子电信号引进、引出的方式,分为有刷旋转变压器和无刷旋转变压器。
在有刷旋转变压器中,定、转子上都有绕组。
转子绕组的电信号,通过滑动接触,由转子上的滑环和定子上的电刷引进或引出。
由于有刷结构的存在,使得旋转变压器的可靠性很难得到保证。
因此目前这种结构形式的旋转变压器应用的很少,我们着重于介绍无刷旋转变压器。
目前无刷旋转变压器有三种结构形式。
1)环形变压器式旋转变压器图1示出环形变压器式无刷旋转变压器的结构。
这种结构很好地实现了无刷、无接触。
图中右侧部分是典型的旋转变压器的定、转子,在结构上和有刷旋转变压器一样的定、转子绕组,作信号变换。
左侧是环形变压器。
它的一个绕组在定子上,一个在转子上,同心放置。
带你深度了解旋转变压器
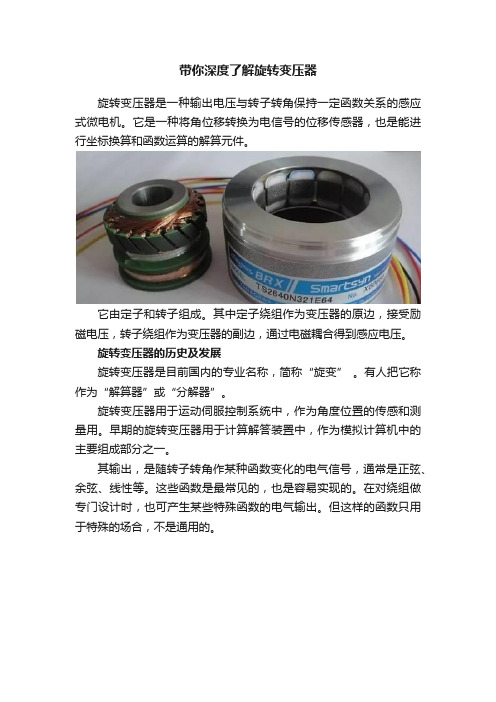
带你深度了解旋转变压器旋转变压器是一种输出电压与转子转角保持一定函数关系的感应式微电机。
它是一种将角位移转换为电信号的位移传感器,也是能进行坐标换算和函数运算的解算元件。
它由定子和转子组成。
其中定子绕组作为变压器的原边,接受励磁电压,转子绕组作为变压器的副边,通过电磁耦合得到感应电压。
旋转变压器的历史及发展旋转变压器是目前国内的专业名称,简称“旋变” 。
有人把它称作为“解算器”或“分解器”。
旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器用于计算解答装置中,作为模拟计算机中的主要组成部分之一。
其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
这些函数是最常见的,也是容易实现的。
在对绕组做专门设计时,也可产生某些特殊函数的电气输出。
但这样的函数只用于特殊的场合,不是通用的。
60年代起,旋转变压器逐渐用于伺服系统,作为角度信号的产生和检测元件。
三线的三相的自整角机,早于四线的两相旋转变压器应用于系统中。
所以作为角度信号传输的旋转变压器,有时被称作四线自整角机。
随着电子技术和数字计算技术的发展,数字式计算机早已代替了模拟式计算机。
所以实际上,旋转变压器目前主要是用于角度位置伺服控制系统中。
由于两相的旋转变压器比自整角机更容易提高精度,所以旋转变压器应用的更广泛。
特别是,在高精度的双通道、双速系统中,广泛应用的多极电气元件,原来采用的是多极自整角机,现在基本上都是采用多极旋转变压器。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
但因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。
随着电子工业的发展,电子元器件集成化程度的提高,元器件的价格大大下降;另外,信号处理技术的进步,旋转变压器的信号处理电路变得简单、可靠,价格也大大下降。
而且,又出现了软件解码的信号处理,使得信号处理问题变得更加灵活、方便。
旋转变压器应用于什么场合
伺服运动控制系统课程作业
问题1:旋转变压器分别用于哪些场合?(正/余弦旋转变压器(XZ)、线性旋转变压器(XX)、比例旋转变压器(XL))
旋转变压器是一种精度很高、结果和工艺要求十分严格和精细的控制微电机。
随着科学技术的不断发展,精确度更高的新型控制微电机虽然相继出现,但是由于旋转变压器价格比较便宜,使用也较方便,所以应用十分广泛。
旋转变压器是一种精密角度、位置、速度检测装置,适用于所有使用旋转编码器的场合,特别是高温、严寒、潮湿、高速、高震动、强电磁干扰等旋转编码器无法正常工作的场合。
由于旋转变压器以上特点,可完全替代光电编码器,被广泛应用在伺服控制系统、机器人系统、机械工具、汽车、电力、冶金、纺织、印刷、航空航天、船舶、兵器、电子、冶金、矿山、油田、水利、化工、轻工、建筑等领域的角度、位置检测系统中。
也可用于坐标变换、三角运算和角度数据传输、作为两相移相器用在角度-数字转换装置中。
目前,正、余弦旋转变压器主要用在三角运算、坐标变换、移相器、角度数据传输和角度数据转换等方面;线性旋转变压器主要用作机械角度与电信号之间的线性变换;比例式旋转变压器主要用作三角变换、电压调节和阻抗匹配。
数据传输用旋转变压器则用来组成同步联接系统,进行远距离的数据传输和角位测量。
它的精确度比自整角机高,一般自整角机的远距离角度传输系统的绝对误差至少为10秒~30秒,若用两极的正、余弦旋转变压器作为发送机和接收机,传输误差可下降到17—5,故一般多用在对精确度要求较高的系统中。
光电与旋变编码器的区别
光电编码器与旋转变压器的区别一、 旋转变压器优点:1、结构简单,坚固耐用,维护方便,非接触式结构,定子和转子分开安装;2、对机械和电气噪音不敏感,抗干扰能力好,具有很高的可靠性;3、高速性能优秀,可配置到60000rpm的电机上;4、绝对值零点位置,电机旋转一圈产出一个正余弦波;5、能应用在各种恶劣环境中,具有防尘、防油、防敲击等特点。
旋转变压器是自动控制装置中的一类精密控制微电机。
从物理本质看,可以认为是一种可以旋转的变压器,这种变压器的原、副边绕组分别放置在定子和转子上。
当旋转变压器的原边施加交流电压励磁时,其副边输出电压将与转子的转角保持某种严格的函数关系,从而实现角度的检测、解算或传输等功能。
注:最大的应用在主轴定位中,因为绝对值零点位置,主轴定位时不再像光电编码器要寻找到Z相信号再执行定位,也不会出现因Z相受到干扰造成主轴定位不准的问题。
装旋转变压器的主轴电机,主轴定位速度快,定位精度高。
缺点:低速响应不理想,低速性能稍差;精度不高,分辨率只有1024。
旋转变压器角度位置伺服控制系统S2S1S4S3S2S1S4S3XB变速齿轮上图是一个比较典型的角度位置伺服控制系统框图永磁交流同步伺服电动机速度控制系统框图B A 旋转变压器的结构根据转子电信号引进、引出的方式,分为有刷旋转变压器和无刷旋转变压器。
在有刷旋转变压器中,定、转子上都有绕组。
转子绕组的电信号,通过滑动接触,由转子上的滑环和定子上的电刷引进或引出。
由于有刷结构的存在,使得旋转变压器的可靠性很难得到保证。
因此目前这种结构形式的旋转变压器应用的很少,我们着重于介绍无刷旋转变压器。
目前无刷旋转变压器有三种结构形式。
1)环形变压器式旋转变压器图1示出环形变压器式无刷旋转变压器的结构。
这种结构很好地实现了无刷、无接触。
图中右侧部分是典型的旋转变压器的定、转子,在结构上和有刷旋转变压器一样的定、转子绕组,作信号变换。
左侧是环形变压器。
它的一个绕组在定子上,一个在转子上,同心放置。
伺服电机旋转变压器及正余弦编码器零点校准系统
The system’s hardware mainly includes digital controller and power driver board. The control board based on DSP is designed to deal with encoder signals and motor control algorithm, and other control programs. The power driver board is developed based on rectifier and inverter circuits, which drive motors to rotate according to the basic principle of ―various voltage various frequency‖. The system’s software is based on state machines, which means the shift between several different states can be easily controlled. Additionally, the user friendly human-machine interface can not only monitor the real-time condition of whole system but also allows user to change and save all kinds of parameters. Finally, through the system debug, our design satisfied the user’s technical requirements.
旋转变压器与编码器的区别

从原理上讲,旋转变压器是采用电磁感应原理工作,随着旋转变压器的转子和定子角位置不同,输出信号可以实现对输入正弦载波信号的相位变换和幅值调制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角位置关系。
旋转变压器有单对极和多对极之分,n对极的又被习惯地称为n倍速。
在一个极对的角度范围内(单对极就是一整圈),旋转变压器信号经处理后的结果一般都具有反映绝对位置的特性,即可反映当前角位置是处于0~360度(电角度)中的多少度上。
目前商用分辨率可以做到2的12次方以上,直至2的16次方,再高就比较困难了。
典型的旋转变压器本体由硅钢片和漆包线构成,不包含任何电子元件,因而抗震能力和温度特性极佳,因而其抗恶劣环境的工作能力远胜于普通旋转编码器,在军工产品中具有广泛应用。
典型的旋转编码器采用光栅原理,用光电方法进行角位置检测,又可分为增量式和绝对式等类型.旋转变压器简称旋变,是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。
用户往往选择BRT型的旋变,因为它易于解码。
有增量型和绝对型增量型只是测角位移(间接为角速度)增量,以前一时刻为基点.而绝对型测从开始工作后角位移量.增量型测小角度准,大角度有累积误差绝对型测小角度相对不准,但大角度无累积误差说简单点的编码器更精确采用的是脉冲计数旋转变压器就不是脉冲技术而是模拟量反馈据我所知区别如下:1、编码器多是方波输出的,旋变是正余弦的,通过芯片解算出相位差。
2、旋变的转速比较高,可以达到上万转,编码器就没那么高了。
3、旋变的应用环境温度是-55到+155,编码器是-10到+70。
旋线式旋转变压器简介讲解

3. 位置传感器介绍
常用传感器介绍 光电编码器介绍
3.1 常用传感器介绍
作为速度及位置传感元件,常用的有这样几种:光学编码器、磁性编码器 和旋转变压器。由于制作和精度的缘故,磁性编码器没有其他两种普及。光 学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因 而得到了很好的应用。早期的旋转变压器,由于信号处理电路比较复杂,价 格比较贵的原因,应用受到了限制。因为旋转变压器具有无可比拟的可靠性 ,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事 以及航天、航空、航海等方面。
4.6 电梯上的应用
旋转变压器在电梯上面的应用,主要是用于电机门机以及曳引机上面,主要是作 为位置传感器使用。三菱电梯已把旋变使用于永ቤተ መጻሕፍቲ ባይዱ同步门机,上海桑塔斯曳引机 也已经使用旋转变压器作为位置传感器另外我公司生产的旋转变压器比较容易实 现外转子结构,可以使曳引机的结构更加简单、可靠。
4.7 航空航天上的应用
6)相位移 次级输出电压相对于初级励磁电压在时间上 的相位差。相位差的大小有关因素——旋变类型、尺 寸、结构和励磁频率。
7)基准相位 基准相位是指旋转变压器从基准电气零位 开始,作正向旋转时出现的第一个基波最大电压的相 位。
相位的规定方法:①初级励磁电压的相位为基准; ②以次级电压最大输出时的相位为基准。
2.2 旋转变压器使用注意事项
4)屏蔽 旋转变压器本身的磁场比较弱,当外部有强磁场靠近 旋转变压器时(例如在电动机中),会影响旋转变压 器的磁场和在旋转变压器绕组端部的磁状态,进而产 生误差电势,产生误差。因此,应该尽量使得旋转变 压器远离强磁场,以及采取磁屏蔽措施。
2.2 旋转变压器使用注意事项
油田机械上的应用
各种编码器的调零方法

各种编码器的调零量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A 和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的UV线反电势波形;2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW 三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置;4.一边调整,一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点,最终使上升沿和过零点重合,锁定编码器与电机的相对位置关系,完成对齐。
旋转变压器的用处及调整

旋转变压器的用处及调整旋转变压器能够按正弦、余弦、线性等函数关系将转角转换为电信号输出,用于自动控制系统中作为运算信号元件,可买现三角函数运算、坐标变换、精确测位、角度的数字转换或数据传输、移相等。
旋转变压器的作用是通过输出电压和转子转动角度之间的关系来体现的,对旋转变压器的要求主要集中于信号变换性能方面,具体包括:感应电势与转角之间的变化关系尽口_能符合正弦规律;函数误差与零位误差小,精度高,零位输出电压(剩余电压)小;工作可靠性高,损耗小,效率较高。
旋转变压器一般结构类似于绕线型电动机,从不同的角度进行划分可得到不同的旋转变压器种类或名称。
按用途的差异可分为计算用旋转变压器和数据传输用旋转变压器。
按输出电压的转子转角之间的函数关系差异可分为止弦旋转变压器、线性旋转变压器和比例式旋转变压器等按旋转变压器在由其构造的转角运算或相关变换及信号传输系统中的相对位置关系及具体作用可分为旋变发送机、旋变差动发送机和旋变变压器等,这种分类与自整角机的对应分类相似。
另外,也可按结构差异将旋转变压器分为接触式和无接触式(无滑环电刷结构);按转子旋转角度限制义可分为有限转角和无限转角两种类型;按极对数差异又可分为单_对极和多对极旋转变压器.旋转变压器简称旋变,是由经过特殊电磁设计的高性能硅钢叠片和漆包线构成的,相比于采用光电技术的编码器而言,具有耐热,耐振。
耐冲击,耐油污,甚至耐腐蚀等恶劣工作环境的适应能力,因而为武器系统等工况恶劣的应用广泛采用,一对极(单速)的旋变可以视作一种单圈绝对式反馈系统,应用也最为广泛,因而在此仅以单速旋变为讨论对象,多速旋变与伺服电机配套,个人认为其极对数最好采用电机极对数的约数,一便于电机度的对应和极对数分解。
旋变的信号引线一般为6根,分为3组,分别对应一个激励线圈,和2个正交的感应线圈,激励线圈接受输入的正弦型激励信号,感应线圈依据旋变转定子的相互角位置关系,感应出来具有SIN和COS包络的检测信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转变压器与编码器的区
别
The Standardization Office was revised on the afternoon of December 13, 2020
从原理上讲,旋转变压器是采用电磁感应原理工作,随着旋转变压器的转子和
定子角位置不同,输出信号可以实现对输入正弦载波信号的相位变换和幅值调
制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,
根据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角
位置关系。
旋转变压器有单对极和多对极之分,n对极的又被习惯地称为n倍速。
在一个
极对的角度范围内(单对极就是一整圈),旋转变压器信号经处理后的结果一
般都具有反映绝对位置的特性,即可反映当前角位置是处于0~360度(电角
度)中的多少度上。
目前商用分辨率可以做到2的12次方以上,直至2的16
次方,再高就比较困难了。
典型的旋转变压器本体由硅钢片和漆包线构成,不包含任何电子元件,因而抗
震能力和温度特性极佳,因而其抗恶劣环境的工作能力远胜于普通旋转编码
器,在军工产品中具有广泛应用。
典型的旋转编码器采用光栅原理,用光电方法进行角位置检测,又可分为增量
式和绝对式等类型.
旋转变压器
简称旋变,是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
按励磁方式分,多摩川旋转变压器分BRT和BRX两种,BRT是单相励磁两相输出;BRX是双相励磁单相输出。
用户往往选择BRT型的旋变,因为它易于解码。
有增量型和绝对型
增量型只是测角位移(间接为角速度)增量,以前一时刻为基点.而绝对型测从开始工作后角位移量.
增量型测小角度准,大角度有累积误差
绝对型测小角度相对不准,但大角度无累积误差
说简单点的编码器更精确采用的是脉冲计数
旋转变压器就不是脉冲技术而是模拟量反馈
据我所知区别如下: 1、编码器多是方波输出的,旋变是正余弦的,通过芯片解算出相位差。
2、旋变的转速比较高,可以达到上万转,编码器就没那么高了。
3、旋变的应用环境温度是-55到+155,编码器是-10到+70。
4、旋变一般是增量的。
根本区别在于:数字信号和模拟正弦或余弦信号的的区别。
resolver 有2组信号,可以分别处理成增量信号和绝对值型号。
今后会越来越多地得到推广使用。