Matlab的实际应用设计(经典)
实验一典型环节的MATLAB仿真
实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
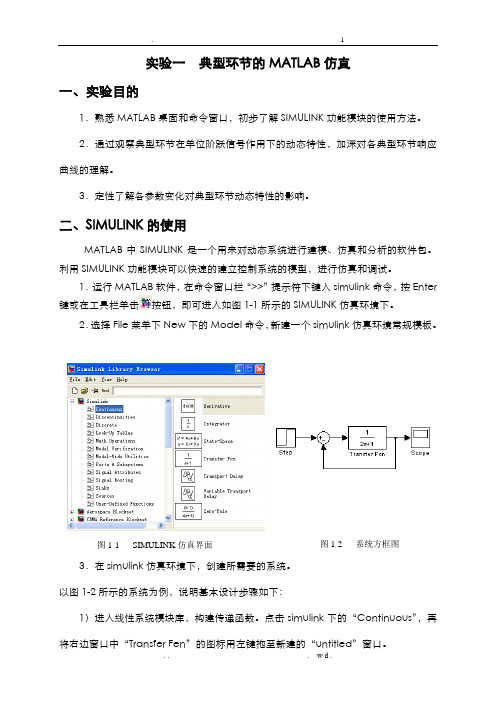
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
图1-1 SIMULINK仿真界面图1-2 系统方框图2)改变模块参数。
在simulink 仿真环境“untitled ”窗口中双击该图标,即可改变传递函数。
其中方括号的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK ,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink 的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math ”右边窗口“Gain ”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink 下的“Source ”,将右边窗口中“Step ”图标用左键拖至新建的“untitled ”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
使用matlab实现模拟退火算法
使用matlab实现模拟退火算法标题:使用MATLAB实现模拟退火算法:优化问题的全局搜索方法引言:模拟退火算法(Simulated Annealing)是一种经典的全局优化算法,常用于解决各种实际问题,如组合优化、参数优化、图形分割等。
本文将详细介绍如何使用MATLAB实现模拟退火算法,并介绍其原理、步骤以及代码实现。
1. 模拟退火算法简介模拟退火算法借鉴了金属退火的物理过程,在解空间中进行随机搜索,用于找到全局最优解。
其核心思想是通过接受一定概率的劣解,避免陷入局部极小值,从而实现全局优化。
2. 模拟退火算法步骤2.1 初始参数设置在使用MATLAB实现模拟退火算法之前,我们需要配置一些初始参数,包括起始温度、终止温度、温度衰减系数等。
这些参数的合理设定对算法的效果至关重要。
2.2 初始解的生成在模拟退火算法中,我们需要随机生成一个初始解,作为搜索的起点。
这个初始解可以是随机生成的,也可以是根据问题本身的特性生成的。
2.3 判定条件模拟退火算法需要一个判定条件来决定是否接受新解。
通常我们使用目标函数值的差异来评估新解的优劣。
如果新解更优,则接受;否则,按照一定概率接受。
2.4 温度更新模拟退火算法中最重要的一步是对温度的更新。
温度越高,接受劣解的概率就越大,随着迭代的进行,温度逐渐降低,最终达到终止温度。
2.5 迭代过程在每次迭代中,我们通过随机生成邻近解,计算其目标函数值,并根据判定条件决定是否接受。
同时,根据温度更新的规则调整温度。
迭代过程中,不断更新当前的最优解。
3. MATLAB实现模拟退火算法在MATLAB中,我们可以通过编写函数或使用内置函数来实现模拟退火算法。
具体的实现方法取决于问题的复杂度和求解的要求。
我们需要确保代码的可读性和可复用性。
4. 示例案例:TSP问题求解为了演示模拟退火算法的实际应用,我们将以旅行商问题(Traveling Salesman Problem,TSP)为例进行求解。
matlab程序设计与应用第3版pdf版

matlab程序设计与应用第3版pdf版引言概述:《MATLAB程序设计与应用第3版》是一本经典的MATLAB编程教材,它提供了广泛的知识和技巧,帮助读者掌握MATLAB的应用。
本文将从五个大点出发,详细阐述该书的内容,包括基础知识、数据处理、图形绘制、符号计算和应用实例。
正文内容:1. 基础知识1.1 MATLAB环境介绍:介绍MATLAB的工作环境和基本操作,包括命令窗口、编辑器、变量和函数的定义等。
1.2 数据类型和运算:详细介绍MATLAB中的数据类型,如标量、向量、矩阵和结构体等,以及常用的运算符和函数。
1.3 控制流程:讲解MATLAB中的条件语句、循环语句和函数的定义与调用,帮助读者掌握程序的流程控制。
1.4 文件与数据的输入输出:介绍如何读写文件和处理各种数据格式,如文本文件、Excel文件和图像文件等。
1.5 调试与性能优化:提供调试MATLAB程序的技巧和方法,并介绍如何优化程序的性能,提高代码的运行效率。
2. 数据处理2.1 数据导入与清洗:介绍如何导入外部数据,并对数据进行清洗和预处理,包括数据类型转换、缺失值处理和异常值检测等。
2.2 数据可视化:讲解如何使用MATLAB的绘图函数绘制各种类型的图表,如折线图、散点图、柱状图和饼图等,以及如何添加标签和注释。
2.3 数据分析与统计:介绍常用的数据分析和统计方法,如描述统计、假设检验、回归分析和聚类分析等,以及MATLAB中相应的函数和工具箱的使用。
2.4 信号处理:介绍信号处理的基本概念和方法,包括时域分析、频域分析和滤波器设计等,以及MATLAB中相关的函数和工具箱。
2.5 机器学习与数据挖掘:简要介绍机器学习和数据挖掘的基本原理和方法,并介绍MATLAB中的机器学习工具箱和数据挖掘工具箱的使用。
3. 图形绘制3.1 2D图形绘制:详细介绍绘制2D图形的方法和技巧,包括曲线绘制、图形样式设置和图形的保存等。
3.2 3D图形绘制:讲解如何绘制3D图形,包括曲面图、散点图和体积图等,以及如何设置视角和光照效果。
适合用matlab解决的经典物理例题

适合用Matlab解决的经典物理例题在物理学领域,经典物理例题一直是学习和研究的重要内容。
而Matlab作为一种强大的数学软件,非常适合解决各种物理问题。
本文将从力学、电磁学和热力学等多个方面,选取一些经典的物理例题,通过Matlab进行分析和求解,展示Matlab在解决物理问题时的强大用途。
1. 简谐振动问题简谐振动是物理学中一个重要的模型,涉及到弹簧振子、单摆等问题。
通过Matlab可以很方便地求解简谐振动的运动规律。
对于弹簧振子的运动方程,可以通过Matlab进行数值模拟,得到振动的周期、频率、位移等参数,从而更好地理解简谐振动的特性。
2. 电场问题在电磁学中,电场是一个重要的研究对象。
通过Matlab可以很容易地分析不同形状的电荷分布所产生的电场分布。
可以通过Matlab计算出点电荷、均匀带电细棒等情况下的电场分布,并绘制出电场线图,直观地展现电场的分布规律。
这样的分析对于理解电场的性质和相互作用具有重要意义。
3. 热传导问题热传导是热力学研究的一个重要方面,涉及到导热方程的求解和热量分布的分析。
通过Matlab可以对不同材料和形状的热传导问题进行数值模拟和求解。
可以通过Matlab计算出棒状材料中的温度分布随时间的演化,从而得到材料的热传导性能。
这样的分析对于工程实践中的热设计和材料选型具有重要指导意义。
4. 万有引力问题在力学中,万有引力是一个经典的例题,涉及到行星轨道、卫星运动等问题。
通过Matlab可以很方便地进行万有引力场下的物体运动模拟。
可以通过Matlab计算地球和月球的引力作用下的月球轨道,从而揭示天体运动的规律和特性。
这样的模拟对于探索宇宙中天体运动规律具有重要帮助。
总结回顾:通过以上例题的分析,我们不仅了解了Matlab在经典物理例题中的应用,也可以发现Matlab在解决物理问题时的便捷和高效。
当然,实际物理问题可能具有更多的复杂性和多样性,需要结合理论分析和实验数据进行综合研究。
MATLAB经典教程(全)PPT课件
MATLAB的优势
易于学习、使用灵活、高效的数值计 算和可视化功能、强大的工具箱支持。
发展历程
从最初的数值计算工具,逐渐发展成 为一款功能强大的科学计算软件,广 泛应用于工程、科学、经济等领域。
MATLAB工作环境与界面
MATLAB工作环境
包括命令窗口、工作空间、命令历史窗口、当 前文件夹窗口等。
界面介绍
详细讲解MATLAB界面的各个组成部分,如菜 单栏、工具栏、编辑器窗口等。
基本操作
介绍如何在MATLAB环境中创建、保存、运行脚本和函数,以及如何进行基本 的文件操作。
基本数据类型与运算
矩阵大小
使用`size`函数获取矩阵的行数 和列数。
矩阵元素访问
通过下标访问矩阵元素,如 `A(i,j)`表示访问矩阵A的第i行第j 列元素。
矩阵基本操作
包括矩阵的加、减、数乘、转置 等操作。
矩阵运算及性质
矩阵乘法 满足乘法交换律和结合律,但不满足 乘法交换律。
矩阵的逆
对于方阵,若存在一矩阵B,使得 AB=BA=I(I为单位矩阵),则称B 为A的逆矩阵。
Hale Waihona Puke 03 数据分析与可视化数据导入、导出及预处理
数据导入
介绍如何使用MATLAB导入各种格式的数据文件, 如.csv、.txt、.xlsx等。
数据导出
讲解如何将MATLAB中的数据导出为常见的数据文件格式,以 便于数据共享和交换。
数据预处理
阐述数据清洗、数据变换、数据规约等预处理技术,为后续的数 据分析和可视化奠定基础。
01
02
Matlab技术的实际应用案例解析

Matlab技术的实际应用案例解析随着计算机技术的发展,Matlab作为一种高级技术语言,被广泛应用于多个领域。
无论是在科研领域还是工程实践中,Matlab都扮演着重要的角色。
本文将通过几个实际应用案例,探讨Matlab技术在不同领域的应用,以期给读者提供一些启示和参考。
一、图像处理领域图像处理是Matlab的一项重要应用领域。
利用Matlab提供的强大的图像处理工具箱,可以实现各种功能,例如图像增强、滤波、分割和识别等。
以下将介绍一个实际应用案例。
案例一:肿瘤图像分割肿瘤图像的分割对于医学诊断非常关键。
在某医院的研究中,研究人员利用Matlab进行了肿瘤图像的分割工作。
首先,他们先对肿瘤图像进行预处理,包括降噪和增强等操作。
然后,利用Matlab提供的图像分割算法,将肿瘤与周围组织分离出来。
最后,通过对分割后的图像进行计算,可以得到肿瘤的大小、形状等信息,为医生提供诊断依据。
二、信号处理领域信号处理是Matlab的另一个重要应用领域。
通过利用Matlab提供的信号处理工具箱,可以实现信号的滤波、谱分析、峰值检测等功能。
以下将介绍一个实际应用案例。
案例二:语音信号增强在通信领域,语音信号是一种常见的信号类型。
在某通信公司的项目中,研发团队利用Matlab对语音信号进行增强。
首先,他们通过Matlab提供的滤波器设计算法,设计了一种高效的降噪滤波器。
然后,他们利用该滤波器对采集到的语音信号进行滤波处理,去除噪声成分。
最后,通过对处理后的语音信号进行主观听感和客观评价,证明了该算法的有效性。
三、控制系统领域Matlab在控制系统领域的应用也非常广泛。
通过Matlab提供的控制系统工具箱,可以进行控制系统的建模、仿真和优化等操作。
以下将介绍一个实际应用案例。
案例三:智能交通信号优化在城市交通系统中,智能交通信号优化是一个重要的研究方向。
在某城市的交通管理局的项目中,研究人员利用Matlab进行了智能交通信号优化的仿真研究。
Matlab在智能控制与自动化系统中的应用案例
Matlab在智能控制与自动化系统中的应用案例智能控制与自动化系统是当今科技领域的热门话题,它涉及到诸多领域,如机器学习、人工智能、机器视觉等。
而Matlab作为一种功能强大的编程语言和软件工具,被广泛应用于智能控制与自动化系统中。
本文将探讨Matlab在该领域中的应用案例,并分析其在实际系统中的作用。
一、机器学习机器学习是智能控制与自动化系统中不可或缺的一部分。
通过机器学习算法,系统可以根据大量的数据进行学习和预测,从而实现自动化控制。
Matlab提供了丰富的机器学习工具和函数,极大地简化了机器学习的实现过程。
以图像识别为例,在智能控制与自动化领域,图像识别广泛应用于人脸识别、物体检测等场景。
Matlab中的图像处理工具箱提供了多种图像特征提取、分类和识别的算法,方便了图像识别的实现。
通过Matlab,可以使用深度学习库来实现卷积神经网络(CNN),从而提高图像识别的精确度和效率。
二、控制系统设计控制系统设计是智能控制与自动化系统中的核心任务。
Matlab提供了丰富的工具箱和函数,支持不同领域的控制系统设计,如PID控制、模糊控制、自适应控制等。
以PID控制为例,PID是一种经典的控制算法,在许多自动化系统中得到广泛应用。
Matlab中的控制系统工具箱可以帮助工程师快速设计和调整PID控制器参数,并通过仿真验证控制效果。
此外,Matlab还提供了优化工具箱,可以根据系统的性能指标,自动优化控制器参数,从而进一步提高控制系统的性能。
三、机器视觉机器视觉是智能控制与自动化系统中的另一个重要领域。
它通过图像和视频数据,实现对现实世界的理解和感知。
Matlab提供了强大的图像处理和计算机视觉工具箱,可以帮助开发人员快速实现各种机器视觉应用。
在工业自动化领域,机器视觉可以用于检测和识别产品缺陷,提高生产线的质量和效率。
通过Matlab,可以利用图像处理和模式识别算法,实现对产品的自动检测和分类。
此外,Matlab的计算机视觉工具箱还提供了特征提取和目标跟踪等功能,可用于实现自动导航和无人车等应用。
经典MATLAB图形用户界面设计

使用场景
按钮适用于需要用户进行选择或确认的操作, 例如开始、停止、重置等。
属性设置
可以设置按钮的文本、大小、位置、样式等 属性。
事件处理
当用户点击按钮时,会触发相应的事件,可 以通过编写回调函数来处理该事件文本信息。
属性设置
可以设置文本框的长度、宽度、字体、颜色等属性。
事件处理
当用户滑动滑块时,会触发相应的事件,可以通过编写回调函数来处理该事件。
下拉菜单
功能描述
下拉菜单用于显示多个选项供用户选择。
属性设置
可以设置下拉菜单的选项、默认选项 等属性。
使用场景
适用于需要提供多个选项供用户选择 的场景,如文件打开、保存等。
事件处理
当用户选择下拉菜单中的某个选项时, 会触发相应的事件,可以通过编写回 调函数来处理该事件。
添加事件处理函数
为每个按钮添加事件处 理函数,实现点击按钮 后执行相应的计算操作。
显示结果
在GUI界面上添加一个文 本框,用于显示计算结 果。
保存和运行
保存GUI文件,并运行程 序,测试计算器功能是 否正常。
设计一个数据可视化GUI
加载和预处理数据
使用Matlab的函数加载数据, 并进行必要的预处理。
表格
功能描述
表格用于显示和编辑二维数 据表格。
使用场景
适用于需要展示和编辑大量 数据的场景,如数据统计、 数据分析等。
属性设置
事件处理
可以设置表格的行数、列数、 单元格内容、样式等属性。
当用户编辑表格中的数据时, 会触发相应的事件,可以通 过编写回调函数来处理该事 件。
04
高级GUI设计技巧
使用布局管理器
化的界面设计和代码生成功 能。
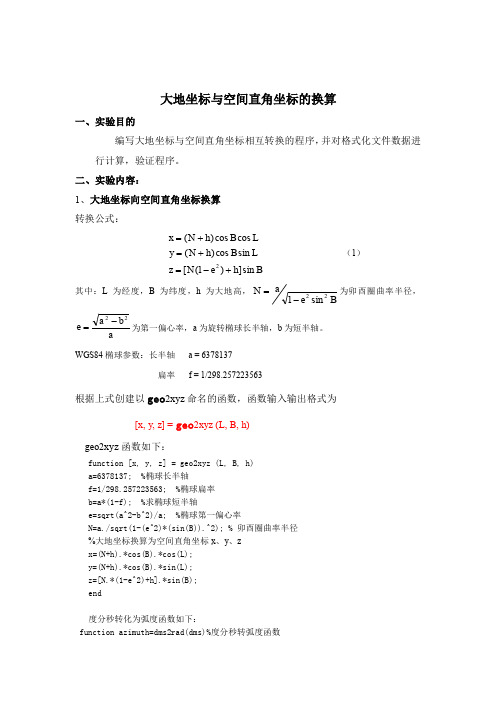
MATLAB实验大地坐标与空间直角坐标的换算程序设计(经典)
min=fix((du-degree)*60); second=(((du-degree)*60-min)*60); B=degree+min/100+second/10000; end
3、实例计算验证 首先将文件 data1.txt 中大地坐标转换为空间直角坐标, 并将转换后的数据按照格 式存贮在文件 data2.txt 中, data1.txt 格式为: data2.txt 格式为: x test 程序如下:
function [x, y, z] = geo2xyz (L, B, h) a=6378137; %椭球长半轴 f=1/298.257223563; %椭球扁率 b=a*(1-f); %求椭球短半轴 e=sqrt(a^2-b^2)/a; %椭球第一偏心率 N=a./sqrt(1-(e^2)*(sin(B)).^2); % 卯酉圈曲率半径 %大地坐标换算为空间直角坐标 x、 y、z x=(N+h).*cos(B).*cos(L); y=(N+h).*cos(B).*sin(L); z=[N.*(1-e^2)+h].*sin(B); end 度分秒转化为弧度函数如下: function azimuth=dms2rad(dms)%度分秒转弧度函数
matlab最优化问题的经典例题

matlab最优化问题的经典例题MATLAB最优化问题的经典例题之一是线性规划问题。
线性规划是一种数学优化方法,用于寻找一组给定线性约束条件下使得目标函数达到最大或最小值的变量值。
假设有以下线性规划问题:最大化目标函数:Z = c1*x1 + c2*x2 + ... + cn*xn在满足约束条件:A*x <= bx >= 0下,求解变量x1, x2, ..., xn的最优解。
使用MATLAB求解该线性规划问题的代码如下:```% 定义目标函数系数向量cc = [c1; c2; ...; cn];% 定义不等式约束条件系数矩阵A和右侧常数向量bA = [A11, A12, ..., A1n;A21, A22, ..., A2n;...,Am1, Am2, ..., Amn];b = [b1; b2; ...; bm];% 定义变量的下界和上界lb = zeros(n, 1); % 下界为0,即 x >= 0ub = Inf(n, 1); % 上界为无穷大,即无上界% 求解线性规划问题[x, fval] = linprog(-c, A, b, [], [], lb, ub);% 输出最优解和最优值disp('最优解:')disp(x)disp('最优值:')disp(-fval)```在上述代码中,我们将目标函数系数向量c、不等式约束条件系数矩阵A和右侧常数向量b、变量的下界和上界lb、ub传递给linprog函数进行求解。
linprog函数返回最优解x和最优值-fval(由于linprog默认求解最小化问题,我们使用-c作为目标函数系数向量,将最大化问题转化为最小化问题)。
通过以上代码,我们可以求解线性规划问题的最优解和最优值,并使用MATLAB进行验证和分析。
这个例题可以帮助我们理解和掌握MATLAB中最优化问题的求解方法。
matlABSIMULINK联合仿真经典的例子

数控螺旋面钻头尖刃磨机的机构仿真一、原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3)S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析) 对动平台4:受力分析如图4图4动平台4的受力分析对并联杆2:受力分析如图5图5并联杆2的受力分析 对直线电机滑块1:受力分析如图6图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析 二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R 1+R2=R3+R4 将上述矢量方程分解为x 和y 方向,并分别对方程两边对时间t 求两次导数得: r1_do t _dot +r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12) r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13) 三)质心加速度的矢量方程矢量关系:Ac3=Rc3_d o t_do t Ac4=R3_do t_dot + Rc4_d o t_do t Ac2=R3_do t_dot + R4_do t_dot + Rc2_d o t_do t (_dot_d ot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y ,F43x,F43y,F13x,F13y,Fy ,Fm 引入的加速度有: α2,α3,r1_do t _dot ,A c3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式101000000000020001010000000000200002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----3000000001010000000030000003333000003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅00330000100000000000003300000100000000003300001rc C r S r C ⎛⎫⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα∙∙⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
适合用matlab解决的经典物理例题

适合用matlab解决的经典物理例题(最新版)目录1.引言:介绍 MATLAB 以及经典物理例题2.MATLAB 在物理学中的应用3.经典物理例题解析4.总结:MATLAB 在解决经典物理例题中的优势正文一、引言MATLAB 是一种广泛应用于科学计算和工程设计的语言,特别是在物理学领域,它为学生们提供了解决复杂数学问题的强大工具。
经典物理例题是物理学教学中的重要组成部分,通过解决这些例题,学生可以深入理解物理学的基本原理和定律。
本文将介绍如何利用 MATLAB 解决一些经典的物理例题。
二、MATLAB 在物理学中的应用MATLAB 在物理学中有着广泛的应用,例如在数据分析、图像处理、数值计算等方面。
它提供了丰富的函数库,如数学运算、矩阵操作、绘图功能等,使得物理学家和学生可以更加高效地完成各种计算任务。
此外,MATLAB 还具有高级的编程功能,可以实现自定义的算法和模型,为解决复杂的物理问题提供了可能。
三、经典物理例题解析1.牛顿运动定律利用 MATLAB 可以方便地解决与牛顿运动定律相关的问题,如物体在给定力的作用下的运动轨迹、速度和加速度等。
通过绘制物体运动的速度- 时间图像,可以直观地观察到物体在不同时间内的运动状态。
2.库仑定律MATLAB 可以用于解决库仑定律相关的问题,例如两个点电荷之间的电力大小和方向、电场强度分布等。
通过 MATLAB 的数值计算功能,可以得到精确的解。
3.波动方程MATLAB 可以方便地解决波动方程相关的问题,如声波、光波等。
通过绘制波动图像,可以直观地观察到波的传播过程和特性。
四、总结MATLAB 作为一种功能强大的科学计算工具,在解决经典物理例题中具有明显的优势。
它不仅可以完成复杂的数学运算,还可以进行数据分析和绘图,使得物理问题的解决更加直观和形象。
同时,MATLAB 的编程功能为解决复杂的物理问题提供了可能。
matlab课程设计综合实例

matlab课程设计综合实例一、教学目标本节课的教学目标是让学生掌握MATLAB的基本操作和编程技巧,能够运用MATLAB进行简单的数学计算、数据分析和图形绘制。
具体分为以下三个部分:1.知识目标:(1)了解MATLAB的发展历程和基本功能;(2)掌握MATLAB的基本数据类型和运算符;(3)熟悉MATLAB的编程环境和语法规则。
2.技能目标:(1)能够使用MATLAB进行简单的数学计算;(2)能够利用MATLAB绘制基础图形;(3)能够运用MATLAB进行基本的数据分析。
3.情感态度价值观目标:(1)培养学生对计算机编程的兴趣和好奇心;(2)培养学生团队协作和自主学习的能力;(3)培养学生运用MATLAB解决实际问题的意识。
二、教学内容本节课的教学内容主要包括以下几个部分:1.MATLAB简介:介绍MATLAB的发展历程、基本功能和应用领域;2.MATLAB基本操作:包括MATLAB的启动和退出、命令窗口的使用、变量赋值、数据类型和运算符;3.MATLAB编程环境:介绍MATLAB的编程语法规则、函数库和脚本文件的使用;4.MATLAB图形绘制:讲解MATLAB绘制基础图形的方法,如线图、柱状图、散点图等;5.MATLAB数据分析:介绍MATLAB进行数据分析的基本方法,如数据排序、筛选、求均值等。
三、教学方法为了提高教学效果,本节课采用以下几种教学方法:1.讲授法:讲解MATLAB的基本概念和操作方法;2.案例分析法:通过分析典型案例,让学生掌握MATLAB的实际应用;3.实验法:安排上机实验,让学生亲自动手操作,巩固所学知识;4.讨论法:学生进行小组讨论,培养学生的团队协作和沟通能力。
四、教学资源为了保证教学质量,本节课准备以下教学资源:1.教材:《MATLAB入门教程》;2.参考书:《MATLAB高级编程与应用》;3.多媒体资料:教学PPT、视频教程;4.实验设备:计算机、MATLAB软件。
matlab编程经典例题

matlab编程经典例题
以下是一些经典的 MATLAB 编程例题:
1. 编写一个程序,计算一个数列的前 N 个斐波那契数(斐波那契数列是指前两个数为 1,后续每个数是前两个数之和)。
2. 编写一个程序,计算一个数的阶乘。
3. 编写一个程序,计算两个矩阵的乘积。
4. 编写一个程序,找到一个数组中的最大元素。
5. 编写一个程序,检查一个字符串是否是回文。
6. 编写一个程序,为给定的一组数据计算均值、中位数和标准差。
7. 编写一个程序,将一个字符串中的所有元音字母替换成大写字母。
8. 编写一个程序,计算一个数列的前 N 个素数(素数是指只能被 1 和自身整除的数)。
9. 编写一个程序,实现冒泡排序算法,对一个数组进行排序。
10. 编写一个程序,计算一个数的平方根。
以上是一些经典的 MATLAB 编程例题,你可以根据自己的实际需要选择其中的一个或几个进行练习和编程。
模糊控制的Matlab仿真实例分析
.
18
在Simulink编辑窗口左边的模块浏览区可以看 到在水箱仿真系统中包括水箱子模型、阀门子 模型及 PID 控制子模型。直接在浏览区中点 击或右键点击它们,并在弹出菜单中选择 [ look under mask 】 ,可以看到这些模块实 现的细节结构,如图 所示。
.
19
.
20
.
21
这里暂时不讨论具体的系统模型的构造问题,我们可 以先在这个已经建立好的系统模型上进行修改,体验 模糊逻辑与仿真环境结合使用的优势。
字分别代表服务和食
物的质量( 10 表示
非常好, 0 表示非常
差),这时小费与它
.
们之间的关系又应4当8
如何反映呢?
假设是二元线性关系 用下列 MATLAB 语句可绘出下图 。
.
49
.
50
可以看到,如果不考虑服务质量因素比食物质量因素对 于小费的支付占有更大的比重,上面的关系图形已经能 够反映一些实际的情况了。假如希望服务质量占小费的 80 % , 而食物仅占 20 %。这里可以设定权重因子:
注意将鼠标箭头放置图内,移动鼠标可得到不同 角度的视图,如下图所示。
.
15
Matlab模糊控制仿真演示例子
模型sltank.mdl ——使用模糊控制器对水箱水位进 行控制。
假定水箱有一个进水口和一个出水口,可以通过控 制一个阀门来控制流入的水量(即水位高度),但 是流出的速度取决于出水口的半径(定值)和水箱 底部的压力(随水箱中的水位高度变化)。系统有 许多非线性特性。
真。
.
31
学习 MATLAB 仿真工具的一个快速有效的方法就 是学习示例模型,通过看懂这些模型和模块的功
能以及搭建过程,可以很快熟悉和掌握如何使用 MATLAB 仿真工具来设计和搭建自己独特的模型。
matlab编程经典例题

3.程序的暂停 暂停程序的执行可以使用pause函数, 其调用格式为: pause(延迟秒数) 如果省略延迟时间,直接使用pause, 则将暂停程序,直到用户按任一键后 程序继续执行。 若要强行中止程序的运行可使用 Ctrl+C命令。
3.2.2 选择结构 1.if语句 在MATLAB中,if语句有3种格式。 (1) 单分支if语句: if 条件 语句组 end 当条件成立时,则执行语句组,执行完之后 继续执行if语句的后继语句,若条件不成立, 则直接执行if语句的后继语句。
例3-12 求[100,200]之间第一个能被21整除 的整数。 程序如下: for n=100:200 if rem(n,21)~=0 continue end break end n
4.循环的嵌套 如果一个循环结构的循环体又包括一个循环结构,就称为 循环的嵌套,或称为多重循环结构。 例3-13 若一个数等于它的各个真因子之和,则称该数为 完数,如6=1+2+3,所以6是完数。求[1,500]之间的全部完 数。 for m=1:500 s=0; for k=1:m/2 if rem(m,k)==0 s=s+k; end end if m==s disp(m); end end
程序如下: price=input('请输入商品价格'); switch fix(price/100) case {0,1} %价格小于200 rate=0; case {2,3,4} %价格大于等于200但小于500 rate=3/100; case num2cell(5:9) %价格大于等于500但小于1000 rate=5/100; case num2cell(10:24) %价格大于等于1000但小于2500 rate=8/100; case num2cell(25:49) %价格大于等于2500但小于5000 rate=10/100; otherwise %价格大于等于5000 rate=14/100; end price=price*(1-rate) %输出商品实际销售价格
matlab在有限差分法数值计算中的应用
matlab在有限差分法数值计算中的应用1.前言有限差分法是一种常用的数值计算方法,常用于求解偏微分方程。
Matlab是一种非常强大的数值计算软件,也被广泛应用于各种科学计算中。
本文将围绕有限差分法在Matlab中的应用进行讨论。
2.有限差分法有限差分法是一种数值计算方法,通常用于求解偏微分方程。
其基本思想是将偏微分方程中的导数用差分的形式进行近似。
这样就可以把偏微分方程转化为差分方程,进而用数值方法求解。
在有限差分法中,将求解区域离散化为网格,并在网格上通过差分近似来求解偏微分方程。
有限差分法的基本思想是将导数转化为差分形式。
由于导数的定义是极限形式的,因此我们可以通过极限的概念来推导差分近似。
例如,对于函数$f(x)$,它在$x=a$处的导数为$f'(a)$,则可以表示为:$$f'(a)=\lim_{h\to0}\frac{f(a+h)-f(a)}{h}$$如果我们取一个无穷小的$h$,则可以得到:$$f'(a)\approx\frac{f(a+h)-f(a)}{h}$$这就是一个一阶中心差分近似。
同样,我们还可以用其他的差分形式来表示导数。
有限差分法的核心就是建立差分方程。
在建立差分方程时,我们需要先将求解区域离散化为网格,然后在每个网格点上建立差分方程。
通常情况下,差分方程和原始的偏微分方程形式相同,只是将偏导数用差分近似来替代。
例如,对于泊松方程:$$\frac{\partial^2\phi}{\partialx^2}+\frac{\partial^2\phi}{\partial y^2}=f(x,y)$$我们可以将其离散化为网格上的差分方程:$$\frac{\phi_{i-1,j}-2\phi_{i,j}+\phi_{i+1,j}}{\Deltax^2}+\frac{\phi_{i,j-1}-2\phi_{i,j}+\phi_{i,j+1}}{\Deltay^2}=f_{i,j}$$其中,$\Delta x$和$\Delta y$表示网格的大小,$\phi_{i,j}$表示在网格点$(x_i,y_j)$处的解,$f_{i,j}$表示在网格点$(x_i,y_j)$处的源项。
经典-三阶系统的MATLAB仿真设计
经典-三阶系统的MATLAB仿真设计概述本文档介绍了如何使用MATLAB进行经典-三阶系统的仿真设计。
三阶系统是一种常见的线性系统,具有三个独立的输入和输出。
步骤1. 定义系统模型- 使用MATLAB的Control System Toolbox中提供的函数来定义三阶系统的传递函数。
- 传递函数的形式为:G(s) = (b0 * s^2 + b1 * s + b2) / (a0 * s^3 + a1 * s^2 + a2 * s + a3)。
- 修改传递函数中的系数(b0, b1, b2, a0, a1, a2, a3)以适应你的具体系统。
2. 设计控制器- 根据系统的性能要求,选择适当的控制器类型和参数。
- 可以选择PID控制器、模糊控制器或者其他控制器类型。
- 使用MATLAB的Control System Toolbox中提供的函数来设计和调整控制器参数。
- 调整控制器参数以达到所需的系统响应。
3. 进行仿真- 使用MATLAB的Simulink来建立系统的仿真模型。
- 将定义好的系统模型和设计好的控制器连接到仿真模型。
- 设置仿真时间和仿真步长。
- 运行仿真并观察系统的响应。
4. 优化控制器参数- 根据仿真结果,对控制器参数进行优化。
- 可以使用MATLAB的优化工具箱中提供的优化算法来寻找最佳控制器参数。
- 不断进行仿真和参数优化,直到系统的响应符合要求。
总结通过使用MATLAB进行经典-三阶系统的仿真设计,我们可以方便地设计和优化控制器参数,从而实现所需的系统性能。
根据具体的系统要求,可以使用不同的控制器类型和算法来实现最优的控制效果。
通过不断的仿真和参数优化,我们可以有效地改进系统的响应和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计学院:数学学院学号:********姓名:***辅导老师:陈晓红殷明题目一二三四五六七八总具体题目1.11.21.32.12.33.13.23.34.14.24.35.15.25.36.16.27.47.58.18.420题实验一1.1 水手、猴子和椰子问题一、问题描述1.1 水手、猴子和椰子问题:五个水手带了一只猴子来到南太平洋的一个荒岛上,发现那里有一大堆椰子。
由于旅途的颠簸,大家都很疲惫,很快就入睡了。
第一个水手醒来后,把椰子平分成五堆,将多余的一只给了猴子,他私藏了一堆后便又去睡了。
第二、第三、第四、第五个水手也陆续起来,和第一个水手一样,把椰子分成五堆,恰多一只猴子,私藏一堆,再去入睡,天亮以后,大家把余下的椰子重新等分成五堆,每人分一堆,正好余一只再给猴子,试问原先共有几只椰子?二、思考与实验试分析椰子数目的变化规律,利用逆向递推的方法求解这一问题。
三、问题分析用递推算法。
首先分析椰子数目的变化规律,设最初的椰子数为p 0,即第一个水手所处理之前的椰子数,用p 1、p 2、p 3、p4、p 5分别表示五个水手对椰子动了手脚以后剩余的椰子数目,则根据问题有所以p5 = 5x +1利用逆向递推的方法,有但由于椰子数为一正整数,用任意的x作为初值递推出的p0数据不一定是合适的。
在实验中可以用for 循环语句结合break语句来寻找合适的x和p0,对任意的x递推计算出p0,当计算结果为正整数时,结果正确,否则选取另外的x再次重新递推计算,直到计算出的结果p0为正整数为止。
再用x表示最后每个水手平分得到的椰子数,于是有四、源程序n=input('input n:');for x=1:np=5*x+1;for k=1:5p=5*p/4+1;endif p==fix(p)break;endenddisp([x,p]);五、实验结果六、结果分析从理论上分析,由于所以要使得最初的椰子数p 0为整数,必须取 (x +1) 为 4 5( =1024)的倍数,一种简单的处理可取 x = 1023。
1.2 105nn x I dx x=+⎰ 一、问题描述1.2 设,105nn x I dx x=+⎰ (1)从0I 尽可能精确的近似值出发,利用递推公式:115(1,2,20)n n I I n n-=-+=计算机从1I 到20I 的近似值;(2)从30I 较粗糙的估计值出发,用递推公式:111(30,29,,3,2)55n n I I n n-=-+=计算从1I 到20I 的近似值;(3)分析所得结果的可靠性以及出现这种现象的原因。
二、问题分析有种方法可以尽可能地精确的计算0I 的值,我们可以根据积分计算得0I =ln 1.2=0.1823,然后可以编程求解1I 到20I 的近似值。
三、源程序及运行结果 (1) fun=inline('1./(5+x)','x') z=quad(fun,0,1) for n=1:20 z=-5*z+1/n endz =0.0188 z =0.0169 z =0.0155 z =0.0135z =0.0156 z =-0.0011 z =0.0770 z =-0.3186 z =1.6554 z =-8.2179 z =41.1453 z =-205.6737z =1.0284e+003(省略前7项)(2)fun=inline('(x.^30)./(5+x)','x') z=quad(fun,0,1) for n=30:-1:2 z=-0.2*z+1/(5*n) endz =0.0130 z =0.0141 z =0.0154 z =0.0169 z =0.0188 z =0.0212 z =0.0243 z =0.0285 z =0.0343 z =0.0431 z =0.0580 z =0.0884(限于篇幅省略前18项)四、结果分析第二种算法较为可靠,原因是迭代时系数较小,第一种方法虽然0I 较精确,但 后面的迭代系数绝对值为5,将误差逐步放大,所以最后结果反而不精确了。
1.3 绘制Koch 分形曲线一、问题描述1.3 绘制Koch 分形曲线:从一条直线段开始,将线段中间的三分之一部分用一个等边三角形的另两条边代替,形成具有5个结点的新的图形(图1);在新的图形中,又将图中每一直线段中间的三分之一部分都用一个等边三角形的另两条边代替,再次形成新的图形(图2),这时,图形中共有17个结点。
这种迭代继续进行下去可以形成Koch 分形曲线。
在迭代过程中,图形中的结点将越来越多,而曲线最终显示细节的多少取决于所进行的迭代次数和显示系统的分辨率。
Koch 分形曲线的绘制与算法设计和计算机实现相关。
二、思考与实验:(1)考虑在Koch 分形曲线的形成过程中结点数目的变化规律。
设第k 次迭代产生结点数为k n ,第1k +迭代产生结点数为1k n +,试写出k n 和1k n +之间的递推关系式; (2)参考问题分析中的算法,考虑图1到图2的过程,即由第一次迭代的5个结点的结点坐标数组,产生第二次迭代的17个结点的结点坐标数组的算法;(3)考虑由第k 次迭代的k n 个结点的结点坐标数组,产生第1k +次迭代的1k n +个结点的结点坐标数组的算法;(4)设计算法用计算机绘制出如下的Koch 分形曲线(图3)。
图 1 图 2图 3三、问题分析①考虑由直线段(2个点)产生第一个图形(5个点)的过程,设1P 和5P 分别为原始直线段的两个端点。
现在需要在直线段的中间依次插入三个点234,,P P P 产生第一次迭代的图形(图1)。
显然,2P 位于1P 点右端直线段的三分之一处,4P 点绕2P 旋转60度(逆时针方向)而得到的,故可以处理为向量24P P 经正交变换而得到向量23P P ,形成算法如下:(1)2151()/3P P P P =+-; (2)41512()/3P P P P =+-;(3)T3242()P P P P A =+-⨯;在算法的第三步中,A 为正交矩阵。
cos sin 33sin cos33A ππππ⎡⎤-⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦; 这一算法将根据初始数据(1P 和5P 点的坐标),产生图1中5个结点的坐标。
这5个结点的坐标数组,组成一个5×2矩阵。
这一矩阵的第一行为为1P 的坐标,第二行为1P 的坐标,第二行为2P 的坐标……第五行为5P 的坐标。
矩阵的第一列元素分别为5个结点的x 坐标 ,第二列元素分别为5个结点的y 坐标。
②在Koch 分形曲线的形成过程中结点数目的变化规律。
设第k 次迭代产生结点数为n k ,第k+1次迭代产生结点数为n k+1,n k 和n k+1之间的递推关系式如下③由第k 次迭代的n k 个结点的结点坐标数组,产生第k+1次迭代的n k+1个结点的结点坐标数组的算法可参考上面两点到五点的算法进行设计。
四、源程序p=[0 0;10 0]; %给出初始数据两个点的坐标 a=[cos(pi/3) -sin(pi/3);sin(pi/3) cos(pi/3)]; %设置用于正交变化的正交矩阵 for k=1:5 %开始执行第一到第五次迭代 n=max(size(p));d=diff(p)/3; %统计前一轮迭代的结点数及形成结点向量 q=p(1:n-1,:);p(5:4:4*n-3,:)=p(2:n,:); %保护前一轮的结点坐标数组 p(2:4:4*n-6,:)=q+d; %插入第一组新结点 p(3:4:4*n-5,:)=p(2:4:4*n-6,:)+d*a'; %用正交变换计算第二组新结点 p(4:4:4*n-4,:)=q+2*d; %插入第三组新结点 endplot(p(:,1),p(:,2)) %根据结点坐标绘图 五、实验结果实验二2.1 用高斯消元法的消元过程作矩阵分解。
一、問題描述2.1 用高斯消元法的消元过程作矩阵分解。
设20231812315A ⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦消元过程可将矩阵A 化为上三角矩阵U ,试求出消元过程所用的乘数21m 、31m 、31m 并以如下格式构造下三角矩阵L 和上三角矩阵U(1)(1)212223(2)313233120231,1L m U a a m m a ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦验证:矩阵A 可以分解为L 和U 的乘积,即A =LU 。
二、源程序及運行結果%将矩阵A 分解为L 和U 的乘积,即A=LU 。
a=input('a=');u=zeros(3,3);l=eye(3,3); for i=1:3u(1,i)=a(1,i); endfor j=2:3l(j,1)=a(j,1)/u(1,1); endfor k=2:3u(k,k:3)=a(k,k:3)-l(k,1:k-1)*u(1:k-1,k:3);l(k+1:3,k)=(a(k+1:3,k)-l(k+1:3,1:k-1)*u(1:k-1,k))/u(k,k); end disp(l); disp(u); 实验结果a=[20,2,3;1,8,1;2,-3,15]1.0000 0 0 0.0500 1.0000 0 0.1000 -0.4051 1.000020.0000 2.0000 3.0000 0 7.9000 0.8500 0 0 15.0443112.3验证希尔伯特矩阵的病态性 一、问题描述2.3 验证希尔伯特矩阵的病态性:对于三阶矩阵11/21/31/21/31/41/31/41/5H ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦取右端向量T[11/613/1247/60]b =,验证:(1)向量T T123[][111]X x x x ==是方程组b =HX 的准确解;(2)取右端向量b 的三位有效数字得T [1.83 1.080.783]b =,求方程组的准确解*X ,并与X 的数据T[111]作比较 。
说明矩阵的病态性。
二、源程序及运行结果(1) H=[1 1/2 1/3;1/2 1/3 1/4;1/3 1/4 1/5]b=[11/6 13/12 47/60]' H\b ans =1.0000 1.0000 1.0000 所以T T123[][111]X x x x ==是方程组b =HX 的准确解(2) b=[1.83 1.08 0.783]' b =1.8300 1.0800 0.7830 H\b ans =1.0800 0.5400 1.4400所算得的解误差较大,所以希尔伯特矩阵呈现病态性实验三3.1 用泰勒级数的有限项逼近正弦函数 一、问题描述3.1 用泰勒级数的有限项逼近正弦函数0132353()sin ,[0,](),[0,/2]()/6,[0,/2]()/6/120,[0,/2]y x x x y x x x y x x x x y x x x x x ππππ=∈=∈=-∈=-+∈用计算机绘出上面四个函数的图形。