GPS控制网平差总结报告.
GPS静态控制测量网平差报告
FJ-3省道S229南坑至源头段二级公路改建工程GPS静态控制测量网平差报告萍乡公路勘察设计院二○一一年九月目录一、GPS控制点成果表 (1)二、GPS控制点网示意图 (1)三、GPS控制网平差报告……………………………………1~4一、G PS控制点成果表序号点号坐标(米) 高程(米)H备注X Y1 G1 3044783.262 483918.997 165.982 源并去南坑公路右侧钢筋砼、与D1通视(K33+655)左侧4米处。
一级GPS静态点2 G2 3045336.142 485138.500 262.207 源并去南坑公路右侧钢筋砼、与D4通视(K32+020)左侧15米处。
一级GPS静态点3 G3 3046850.282 487744.256 159.284 南坑镇七宝村新尤组水泥路中缝钢钉、与D13通视(K28+483)左侧10米处。
一级GPS静态点4 G4 3047703.462 490103.347 158.428 南坑镇大岭路中国移动营业厅、彭红远家5楼顶油漆刻石、与D16通视。
一级GPS静态点5 D1 3044576.685 483709.363 138.070 S314公路弯道边坡上钢筋砼、与D1通视(K33+760)左侧254米处。
RTK加密点6 D2 3044924.025 484045.621 178.946 源并去南坑公路右侧水泥路中缝钢钉与D3通视(K33+460)左侧6米处。
RTK加密点7 D3 3045175.043 484371.238 193.391 源并去南坑公路右侧水泥路中缝钢钉与D4通视(K32+919)左侧97米处。
RTK加密点8 D4 3045128.427 484796.609 215.246 白竺乡崇源村花石组卢富德家2楼顶油漆刻石、与G2通视(K32+423)127米处。
RTK加密点9 D5 3045557.232 485595.899 242.426 源并去南坑公路右侧钢筋砼、与D6通视(K31+524)左侧15米处。
工程测量GPS网平差方法总结
工程测量GPS网平差方法总结摘要:本文针对工程测量平面控制网要求相对精度高的特点,找出gps网平差需解决的关键问题,给出解决问题的几种具体方法,并对各方法使用条件和精度进行了对比分析,对实际作业有一定的指导意义。
关键词:工程测量gps网平差独立坐标系1引言gps技术具有自动化程度高、作业速度快、定位精度高、不受天气条件限制和经济效益高等优势,在航空、航天、军事、交通、运输、水利、资源勘探、通信、气象等几乎所有的领域中都广泛应用,在测绘领域更是迅速普及,测量模式从传统的静态差分相对定位到实时动态测量(rtk)技术,从临时基站rtk到网络rtk(cors), 其技术不断发展,日新月异,但gps技术最典型的用途还是应用静态差分相对定位建立各种精度的控制网。
工程测量对控制网的精度要求有其特殊性,一般对相对精度要求要高于绝对精度,鉴于此,在进行工程测量gps网平差时就要考虑其自身的特点,尽量提高控制网的相对精度。
本文将从实践的角度对工程测量gps网平差的具体方法进行总结。
2工程测量gps网平差需解决的问题及应对措施2.1工程测量gps网平差需解决的问题gps网平差,其实质就是在wgs-84坐标系下对基线向量解算和无约束平差后转换为国家或地方坐标系成果,通常采用固定至少2个已知点数据,强制约束到国家或地方坐标系。
因控制点成果的用途不同,对其精度要求不同,采用的平差方法也不同,在工程测量中,gps网等级分为二、三和四等及一、二级,相对精度要求在1/10000至1/120000之间,特殊工程控制网要求甚至更高。
因国家大地控制网是依高斯投影方法按6°带或3°带进行分带和计算,并把观测成果归算到参考椭球面上,这样做,便于成果的统一、使用和互算。
但倘若直接作为工程测量gps网的固定点进行平差,就有可能产生以下问题:(1)因早期国家控制点精度不高造成内符合精度高的gps网精度的降低;(2)当测区远离中央子午线时,因高斯投影变形大,致使控制网点坐标反算边长与实测边长存在误差,影响施工放样;(3)当测区海拔高时,由于实地边长归算到参考椭球面上的长度变形大,也会产生第2条的问题;(4)不满足某些特殊需要,如桥梁控制网采用桥轴线坐标系更加方便、实用。
GPS平差报告
目录一、测区概述 (1)二、作业区自然地理概况和已有资料情况 (1)2.1作业区自然地理概况 (1)2.2已有资料情况 (2)三、技术依据 (2)四、点位分布 (4)五、外业观测情况 (4)六、数据处理结果 (5)七、GPS内业平差报告 (5)GPS控制网报告一、任务概述且末县位于新疆维吾尔自治区巴音郭楞蒙古自治州南部,塔里木盆地东南缘,昆仑山、阿尔金山北麓,地处东经83°25′-87°30′、北纬35°40′-40°10′之间。
路线全长15.18km。
主要控制点为巴格艾日克乡G315线K1832处,昆仑工业园(绿色有机农产品加工区),且末县新机场,终点位于英吾斯塘乡G315线K1855+500处。
二、作业区自然地理概况和已有资料情况2.1 作业区自然地理概况且末县南屏高山,地势逐渐向东北倾斜,绵绵山脉犹如一条长蛇,雪岭和冰峰如同固体水库,夏日冰雪消融,流水顺山沟由东南向西形成众多河流(主要有车尔臣河、塔什萨依河、喀拉米兰河、莫勒切河、米特河、博斯坦托格拉克河、安迪尔河等)灌溉着且末绿洲。
且末县属暖温带极端干旱大陆性气候,农区年平均气温10.1摄氏度,极端最低气温-26.4摄氏度,极端最高气温41.3摄氏度,年平均无霜期为165天,日较差最大可达24摄氏度,全年太阳总辐射量为119.2千卡\平方厘米,年均降水量18.6毫米,常年主风向为东北风,有7级以上的大风日10天左右,每年平均沙暴天气达20.5天,浮尘天气193.7天。
2.2 已有资料情况测区已有在乌鲁木齐市测绘局购买的1:10000地形图,可作为布设平面控制点选点使用。
已知点是在乌鲁木齐市测绘局购买的三等GPS控制点“84326”和“84328”,平面坐标为6°带1980年西安坐标系,高程为1985年黄海高程系。
经现场检核上述点的坐标和高程均正确无误,可以在本次工程中使用。
三、技术依据此次测量任务的技术依据为《全球定位系统(GPS)测量规范》(GB/T 18314-2001),二级网GPS测量基本技术要求规定见下2、相邻点间基线长度精度,固定误差a不大5、复测基线长度较差ds≤2;6、独立闭合环或者附合路线坐标闭合差≤3,≤3,≤3,≤3,=7、同步环闭合差≤,≤,≤8、无约束平差中,基线分量的改正数绝对值≤3,、约束平差中,基线分量的改正数绝对值2,2另外,其他的规范要求如下:表1 精度分级表2 精度要求表3 相邻点间平均边长参照值表4 各级GPS测量基本技术要求规定四、点位分布五、外业观测情况本次测量中所用的仪器为华测T6接收机,精度经检验合格。
GPS控制网平差总结报告

GPS控制网平差总结报告GPS控制网是指由一组GPS基准站组成的网络,用于测量和控制大范围区域内的GPS定位精度。
GPS控制网平差是对GPS观测数据进行处理和分析,得到每个GPS站点的坐标和高程的过程。
该报告对GPS控制网平差的基本原理、流程以及常用的算法进行了总结。
报告首先介绍了GPS控制网平差的基本原理。
GPS观测数据包括卫星观测值和接收机历元数据,可以通过基线解算得到不同站点之间的相对位置关系。
基于这些相对位置关系,可以通过平差方法计算出每个站点的绝对坐标和高程。
报告还列举了常用的GPS控制网平差算法。
最常用的算法包括最小二乘法、加权最小二乘法和区域平差法。
最小二乘法通过最小化观测值与模型预测值之间的残差来求解平差参数。
加权最小二乘法则考虑观测数据的权重,将不同类型的数据进行加权处理。
区域平差法则将整个控制网分成若干个区域,分别进行平差计算,再通过闭合差控制各个区域之间的一致性。
最后,报告总结了GPS控制网平差的应用和挑战。
GPS控制网平差在地理测量、地质灾害监测和测绘工程等领域具有重要应用价值。
然而,由于GPS观测数据本身存在误差和不确定性,平差算法和数据处理过程中需要考虑到这些因素,以提高平差结果的准确性和可靠性。
综上所述,GPS控制网平差是一种重要的测量和控制技术,可以用于获取大范围区域内的GPS定位精度。
通过了解GPS控制网平差的基本原理、流程和常用算法,可以更好地应用该技术解决实际问题。
然而,在实际应用中仍然需要不断改进算法和数据处理方法,以提高平差结果的精度和可靠性。
GPS网平差的类型和作用

GPS网平差的类型和作用
一、网平差的类型
无约束平差
定义:gps网的无约束平差指的是在平差时不引入会造成GPS网产生由非观测量所引起的变形的外部起算数据。
常见的GPS网的无约束平差,一般是在平差时没有起算数据或没有多余的起算数据。
约束平差
定义:GPS网的约束平差指的是平差时所采纳的观测值完全是GPS 观测值(即GPS基线向量),而且,在平差时引入了使得GPS网产生由非观测量所引起的变形的外部起算数据。
联合平差
定义:GPS网的联合平差指的是平差时所采纳的观测值除了GPS观测值以外,还采纳了地面常规观测值,这些地面常规观测值包括边长、方向、角度等观测值等。
二、无约束平差的作用
评定GPS网的内部符合精度,发觉和剔除GPS观测值中可能存在的粗差,得到GPS网中各个点在WGS-84系下经过了平差处理的三维空间直角坐标,为将来可能进行的高程拟合,供应经过了平差处理的大地高数据
三、平差结果的质量评定
指标:相邻点距离中误差
1.单位权方差的检验2.基线改正数的检验3.已知坐标的检验。
GPS静态控制测量平差结果分析
据 一一计算 出来 , 结合 轨道参数 、 钟差 参数 , 完善监测站 的相关 数据 。而注入站则是将主控站所完成 的这些编织成相 应的导航 信 号系统 , 再经过主控站发送 出去 。最后传入到存储器 中。
1 . 1 - 3 G P s用户 设 备
应小于相应级 别规 定精度的 2 、 / 倍。 而其 中任一时段的结果与 各时段平均值之差不能超过相应级别的规定精度 。
段。
差、 电离层 延迟 、 对流程 延迟等) , 因而可 以获得很高精度 的相对 位置。G P S相对定位分为静态相对定位和动态相对定位 , 其 中静
l 静态 G P S测量概述
位置相对 固定 ,用多 台接收机在不 同的测站上进行相对 定位的
同步 观 测 , 测 量 时 间 由几 分钟 至 几 小 时 。通 过 大 量 的重 复 观 测 测
建材发展导 向2 0 1 3 年 5月
【 文章编号 】 1 6 7 2 — 1 6 7 5 ( 2 0 1 3 ) 0 9 — 0 1 9 9 — 0 2
地 质 勘 测
G P S静态控制测量平差结果分析
申 锐
( 云 南 省 地矿 测 绘 院 云 南 昆明 6 5 0 0 0 0 )
2 . 1 基线 质量检 核
1 . 1 静态 G P S组成
部 分 组成
在 基 线 质 量 检 核 前 应 该 先 明确 外 业 控 制 测 量 所 要 求 达 到 的 静态 G P S主要 由空间卫星星座 、地 面监控站及用户 设备三 等级 。 根据 范》 规 定各等级 网相邻点间基 线长度精度用 以下公 式表示 :
2 . 2 . 2 同 步环 闭合 差 检 核
《 规范》 中对同步闭合环 的要求 :
GPS控制网测量平差报告

华南农业大学11测绘GPS控制网测量GPS网平差结果施工单位:11测绘第二小组负责人:梁永健观测时间:2013年06月18日观测数据:文件名观测日期开始结束点名天线高天线高机号.STH 2013年06月18日 09时37分 12时13分 6018 H58.STH 2013年06月18日 12时46分 13时38分 6018 S.STH 2013年06月18日 09时42分 10时30分 6019 S0*******.STH 2013年06月18日 11时24分 13时38分 6050 H392013年06月18日 09时37分 10时32分 CL01 H392013年06月18日 09时35分 10时39分 CL02 S0*******2013年06月18日 11时03分 13时38分 CL03 S0*******2013年06月18日 12时51分 13时59分 CL04 H582013年06月18日 11时18分 13时40分 GP04 S0*******2013年06月18日 09时07分 12时12分 XX02 S基线解算:6091 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/13095双差固定解 1/193286092 观测量L1 L2 P2同步时长 49分钟历元间隔:30 高度截止角:三差解 1/44764双差浮点解 1/30669双差固定解 1/295696050 观测量L1 L2 P2同步时长 52分钟历元间隔:30 高度截止角:三差解 1/58172双差浮点解 1/37173双差固定解 1/34257-CL011691 观测量L1 L2 P2同步时长 55分钟历元间隔:30 高度截止角:三差解 1/168531双差浮点解 1/107755双差固定解 1/96010CL01 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:三差解 1/32787双差浮点解 1/12944双差固定解 1/19988-CL021691 观测量L1 L2 P2同步时长 61分钟历元间隔:30 高度截止角:三差解 1/170886双差浮点解 1/92845双差固定解 1/86209CL02 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:三差解 1/36483双差浮点解 1/15768双差固定解 1/23925CL021691-CL011691 观测量L1 L2 P2同步时长 55分钟历元间隔:30 高度截止角:三差解 1/46987双差浮点解 1/33963双差固定解 1/32331-CL031692 观测量L1 L2 P2同步时长 69分钟历元间隔:30 高度截止角:三差解 1/64485双差浮点解 1/25707双差固定解 1/45989CL03 观测量L1 L2 P2同步时长 52分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/30354CL03 观测量L1 L2 P2同步时长 134分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/8517双差固定解 1/14188CL04 观测量L1 L2 P2同步时长 47分钟历元间隔:30 高度截止角:三差解 1/198186双差浮点解 1/127409双差固定解 1/114414-CL041693 观测量L1 L2 P2同步时长 47分钟历元间隔:30 高度截止角:三差解 1/120222双差浮点解 1/92753双差固定解 1/70265CL031692-CL041693 观测量L1 L2 P2同步时长 47分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/28123双差固定解 1/44647-GP041692 观测量L1 L2 P2同步时长 54分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/22745双差固定解 1/42562GP04 观测量L1 L2 P2同步时长 52分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/23000双差固定解 1/37204GP04 观测量L1 L2 P2同步时长 134分钟历元间隔:30 高度截止角:三差解 1/1双差固定解 1/41197CL031692-GP041692 观测量L1 L2 P2同步时长 139分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/15273双差固定解 1/21202GP041692-CL041693 观测量L1 L2 P2同步时长 49分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/30484双差固定解 1/48672XX02 观测量L1 L2 P2同步时长 155分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/21410双差固定解 1/38072XX02 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/14651双差固定解 1/24778XX02 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:三差解 1/143069双差浮点解 1/83251双差固定解 1/80842XX021691-CL011691 观测量L1 L2 P2同步时长 55分钟历元间隔:30 高度截止角:三差解 1/169293双差浮点解 1/103989双差固定解 1/95524XX021691-CL021691 观测量L1 L2 P2同步时长 63分钟历元间隔:30 高度截止角:双差浮点解 1/92822双差固定解 1/82674XX021691-CL031692 观测量L1 L2 P2同步时长 69分钟历元间隔:30 高度截止角:三差解 1/170474双差浮点解 1/97665双差固定解 1/89279XX021691-GP041692 观测量L1 L2 P2同步时长 54分钟历元间隔:30 高度截止角:三差解 1/1双差浮点解 1/14106双差固定解 1/24940组网:闭合环最大节点数: 3闭合环总数: 41同步环总数: 29异步环总数: 12同步环情况:环号环总长相对误差△Xmm △Ymm △Zmm △边长mm 1环中的点:CL01 6019 60182环中的点:CL02 6019 60183环中的点:XX02 6019 60184环中的点:CL03 6050 60187环中的点:CL03 6050 60189环中的点:CL04 6050 601810环中的点:GP04 6050 601813环中的点:GP04 6050 601814环中的点:XX02 6050 601816环中的点:CL02 CL01 601817环中的点:XX02 CL01 601818环中的点:CL02 6019 CL0119环中的点:XX02 6019 CL0120环中的点:XX02 CL02 601821环中的点:XX02 6019 CL0222环中的点:XX02 CL01 CL0224环中的点:CL04 CL03 601825环中的点:GP04 CL03 601828环中的点:GP04 CL03 601829环中的点:XX02 CL03 601831环中的点:CL04 6050 CL0332环中的点:GP04 6050 CL0333环中的点:XX02 6050 CL0335环中的点:GP04 6018 CL0436环中的点:GP04 CL04 605037环中的点:GP04 CL04 CL0338环中的点:XX02 GP04 601840环中的点:XX02 6050 GP0441环中的点:XX02 GP04 CL03异步环情况:环号环总长相对误差△Xmm △Ymm △Zmm △边长mm 5环中的点:CL03 6050 60186环中的点:CL03 6050 60188环中的点:CL04 6050 601811环中的点:GP04 6050 601812环中的点:GP04 6050 601815环中的点:XX02 6050 601823环中的点:CL04 CL03 601826环中的点:GP04 CL03 601827环中的点:GP04 CL03 601830环中的点:XX02 CL03 601834环中的点:GP04 6018 CL0439环中的点:XX02 GP04 6018基线名质量中误差 X Y Z 基线长相对误差Dwx(mm) Dwc(mm)重复基线6092 1/295696050 1/34257重复基线-CL031692 1/45989CL03 1/47377重复基线-GP041692 1/42562GP04 1/37204剔除基线后重复基线剔除基线后重复基线6092 1/295696050 1/34257剔除基线后重复基线-CL031692 1/45989CL03 1/47377剔除基线后重复基线-GP041692 1/42562GP04 1/37204禁用:自动剔除:CL032 2013年06月18日03时三维自由网平差:WGS84-坐标系下经典自由网平差平差结果三维自由网平差单位权中误差: (米)基线及其改正基线名基线△X 基线△Y 基线△Z △X改正mm △Y改正mm △Z改正mm 相对误差平差后距离60691 1:4221260692 1:6962260503 1:69622--CL011691 1:129515CL091 1:36387--CL021691 1:149727CL021 1:46218CL021691--CL011691 1:28389--CL031692 1:123812CL033 1:123812CL043 1:170889--CL041693 1:115500CL031692--CL041693 1:98909--GP041692 1:182792GP043 1:182792GP042 1:178886CL031692--GP041692 1:87961GP041692--CL041693 1:189785XX021 1:146449XX021 1:41336XX022 1:158494XX021691--CL011691 1:103986XX021691--CL021691 1:99687XX021691--CL031692 1:121513XX021691--GP041692 1:92831平差后Wgs84坐标和点位精度ID 状态 X Y Z X偏移mm Y偏移mm Z偏移mm 点名6018 固定 60186019 60196050 6050CL01 CL01CL02 CL02CL03 CL03CL04 CL04GP04 GP04XX02 XX02ID 状态 B L H B偏移(秒) L偏移(秒) H偏移mm 点名6018 固定60186019601960506050CL01CL01CL02CL02CL03CL03CL04CL04GP04GP04XX02XX02二维约束网平差:当前坐标系统: 11测绘椭球长半径: 椭球扁率:1/控制等级:二级M0: H=:(投影高)B0: L0= (中央子午线)N0: (北向加) E0= (东向加)采用网配合法进行转换已知点坐标与坐标系设置不相符基线名△X改正mm △Y改正mm 相对误差距离 6018--6019 1:629366018--6050 1:1107916018--CL01 1:195893CL01--6019 1:542196018--CL02 1:226918CL02--6019 1:69051CL02--CL01 1:430266018--CL03 1:187405CL04--6018 1:2629996050--CL04 1:183942CL03--CL04 1:1499476018--GP04 1:284792GP04--6050 1:280100CL03--GP04 1:134750GP04--CL04 1:295426XX02--6018 1:228493XX02--6019 1:61732XX02--6050 1:250836XX02--CL01 1:158950XX02--CL02 1:152868XX02--CL03 1:185443XX02--GP04 1:144665单位权中误差 (米)平差后坐标和点位精度ID X坐标 Y坐标 rms(mm) dx(mm) dy(mm) 点名6018 60186019 60196050 6050CL01 CL01CL02 CL02CL03 CL03CL04 CL04GP04 GP04XX02 XX02高程拟合平差:1 参数拟合高程内符合精度中误差± (mm)拟合后高程残差点号正常高(高程) 大地高正常高(拟合) 差值 Rms(mm) GP04XX02拟合高程ID 正常高(高程) 大地高 Rms(mm) 点名6018 60186019 60196050 6050CL01 CL01CL02 CL02CL03 CL03CL04 CL04平差成果表:。
GPS平差报告

附表2-2:GPS网平差报告表GPS复测平差报告1、项目信息1.1项目属性项目名称:保定项目单位: 南水北调中线***期工程天津干线工程保定市2段工程施工单位: 中国葛洲坝集团第*****工程有限公司保定2段项目部负责人:****测量员: ****** 计算员:*****开始日期:2011-**-***结束日期:2011-**-***备注:1.2坐标系统椭球长半轴 a:6378245.000000 椭球扁率 f:1/298.300000投影名称:高斯投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:000:00:00.000000N 中央子午线:116:07:00.000000E1.3WGS84到当地椭球固定转换参数参数计算结果转换模型:布尔莎DX(m)= 0.000000DY(m)= 0.000000DZ(m)= 0.000000WX(秒)= 0.00000WY(秒)= 0.00000WZ(秒)= 0.00000K(ppm)= 0.0000002、WGS-84三维无约束平差2.1 平差参数参考因子:1.00χ平方检验(α=95%):通过自由度:32.2 平差基线边序号基线名DX(m)DY(m)DZ(m)距离中误差 (m)改正数 (m)改正数 (m)改正数 (m)改正数 (m)相对误差1 XW25→XW26434.5536-323.0064591.8890802.18610.03060.00150.0129-0.0011-0.00531: 462142 XW25→XW28-5431.6415-4731.03112281.50367555.83500.0381 -0.0283-0.00240.00180.02241: 1980863 XW25→XW29-5114.3106-5058.34132815.07517724.48290.0389 -0.00000.00000.00000.00001: 1984774 XW26→XW28-5866.1950-4408.02471689.61467529.78910.03160.00290.0039-0.0020-0.00501: 2380752.3 T 检验列表基线名T - X T - Y T - ZXW25→XW260.02950.15850.0243XW25→XW280.24370.01410.0131XW25→XW290.00000.00000.0000XW26→XW280.04370.04640.04862.4自由网平差坐标序号点名纬度(D:M:S) 经度(D:M:S) 椭球高(m)点位中误差中误差 (m)中误差 (m)中误差 (m)1 XW25 39:06:04.13100N116:05:17.21361E20.68000.01820.00710.00740.01502 XW26 39:06:28.86671N116:05:06.88171E20.60680.02120.00990.00810.01703 XW28 39:07:39.49315N116:10:06.92388E20.30630.02660.01070.01060.02204 XW29 39:08:01.79014N116:10:01.07582E20.60960.03290.01300.01360.02723、二维平差3.1平差参数迭代次数:2网的参考因子: 1.0002x向平移: -25.6071米y向平移: 10040.3083米比例: -17.2296ppm 旋转: -266.4408秒3.2平面距离平差值起点终点Nerror(m)中误差(m)Eerror(m)中误差(m)平距方位角中误差(m)相对误差XW25XW26762.56550.0123-248.98240.0071802.1835341.91780.01421: 56340 XW282950.68400.00006955.84200.00007555.810667.01320.00001:534213371XW293638.02440.01586814.10500.00297724.457861.90240.01611: 378992 XW26XW282188.11850.01237204.82440.00717529.764873.10640.01421: 528841基线最弱边相对中误差起点终点Nerror(m)中误差(m)Eerror(m)中误差(m)平距方位角中误差(m)相对误差XW25XW26762.56550.0123-248.98240.0071802.1835341.91780.01421: 563403.3 平面坐标序号点名N E中误差(m)误差椭圆中误差 (m)中误差 (m)E(m)F(m)ET(D:M:S)1 XW25 4329781.7660507570.4540<已知> ***** ***** ***** **********2 XW26 4330544.3315507321.47160.0142 0.0128 0.0063 162:12:340.01230.00713 XW28 4332732.4500514526.2960<已知> ***** ***** ***** **********4 XW29 4333419.7904514384.55900.0168 0.0177 0.0100 146:16:030.01080.0129序号点名N E中误差(m)误差椭圆中误差 (m)中误差 (m)E(m)F(m)ET(D:M:S)4 XW29 4333419.7904514384.55900.0168 0.0177 0.0100 146:16:030.01080.01294.1最终平面距离平差值起点终点Nerror(m)中误差(m)Eerror(m)中误差(m)平距方位角中误差(m)相对误差XW25 XW26 762.5655 0.0123 -248.9824 0.0071 802.1835 341.9178 0.0142 1: 56340 XW28 2950.6840 0.0000 6955.8420 0.0000 7555.8106 67.0132 0.0000 1:534213371XW29 3638.0244 0.0158 6814.1050 0.0029 7724.4578 61.9024 0.0161 1: 378992 XW26 XW28 2188.1185 0.0123 7204.8244 0.0071 7529.7648 73.1064 0.0142 1: 528841基线最弱边相对中误差起点终点Nerror(m)中误差(m)Eerror(m)中误差(m)平距方位角中误差(m)相对误差XW25XW26762.56550.0123-248.98240.0071802.1835341.91780.01421: 563404.2最终坐标平差值点名x y正高(m)平面中误差中误差 (m)中误差 (m)中误差 (m)XW25 4329781.7660507570.45409.9470***** ***************XW26 4330544.3315507321.47169.80650.01420.01230.00710.0993XW28 4332732.4500514526.29609.3620***** ***************XW29 4333419.7904514384.55909.80810.01680.01080.01290.1016点名x y正高(m)平面中误差中误差 (m)中误差 (m)中误差 (m)XW29 4333419.7904514384.55909.80810.01680.01080.01290.1016宋珂(书记)ⅡXW025 ~ ⅡXW026 1.4km (平地)ⅡXW024 ~ ⅡXW025 5.5km (平地)地面29.8m26.8m38.1m大高村鞭炮厂砖24.点正北1.4m埋有指示碑4015大高村长江勘测规划设计研究院长江勘测规划设计研究院3060标石断面图单位:厘米4020标石质料标石类型70土地使用者地下水深度φ108钢管保 管 人维 修 者维修日期维修单位20040埋 石 者埋石日期埋石单位选 点 者备 注选点日期选点单位接管单位所 在 地详细说明点 位地别土质交通路线经 纬 度所在图幅ⅡXW025河北省高碑店市白沟镇大高村王春生滕传斌3.点西南至大门西围墙拐弯处38.1m 2.点西南至大门东围墙拐弯处26.8m 1.点东南至围墙东北角29.8m2004年9月12日2004年9月5日10-50-29-丙混凝土普通水准标石混凝土 、不锈钢标志河北省高碑店市白沟镇大高村村东南鞭炮厂耕地边 黄土自霸州市沿津保公路西行至大高村丁字路口,再沿砖道南行约600m至鞭炮厂可达本点B:39°06.1′L:116°05.3′ 北详细位置图宋珂(书记)6.7m村高大ⅡXW025 ~ ⅡXW026 1.4km (平地)ⅡXW026 ~ ⅡXW027 4.0km (平地)地面44.4m24.4m4.点正北1.4m埋有指示碑4015大高村长江勘测规划设计研究院长江勘测规划设计研究院3060标石断面图单位:厘米4020标石质料标石类型70土地使用者地下水深度φ108钢管保 管 人维 修 者维修日期维修单位20040埋 石 者埋石日期埋石单位选 点 者备 注选点日期选点单位接管单位所 在 地详细说明点 位地别土质交通路线经 纬 度所在图幅ⅡXW026河北省高碑店市白沟镇大高村王春生滕传斌3.点西北至林地东北角24.4m 2.点西南至林地东南角(东西坎东头)44.4m 1.点东南至02号电线杆6.7m2004年9月12日2004年9月5日10-50-29-丙混凝土普通水准标石混凝土 、不锈钢标志河北省高碑店市白沟镇大高村东约100米路边 黄土自霸州市沿津保公路西行至大高村村东丁字路口,再沿砖道南行约500米至大高村村东可达本点B:39°06.5′L:116°05.1′ 北详细位置图李文明22.6m19.0mⅡXW0275.点正北1.4m埋有指示碑ⅡXW026 ~ ⅡXW027 4.0km (平地)ⅡXW027 ~ ⅡXW028 4.5km (平地)地面(14)9.9m10.0m辉永奶牛养基地殖司公限有塑革鑫洪定保乡沙北至沥(9)4.点东北至14号电线杆10.0m 4015西柳村长江勘测规划设计研究院长江勘测规划设计研究院3060标石断面图单位:厘米4020标石质料标石类型70土地使用者地下水深度φ108钢管保 管 人维 修 者维修日期维修单位20040埋 石 者埋石日期埋石单位选 点 者备 注选点日期选点单位接管单位所 在 地详细说明点 位地别土质交通路线经 纬 度所在图幅河北省雄县大营镇西柳村王春生滕传斌3.点西北至革塑有限公司宿舍东北角19.0m 2.点西南至革塑有限公司宿舍北门墩东北角22.6m 1.点东南至永辉奶牛养殖基地北门墩西北角9.9m2004年9月17日2004年9月1210-50-29-丙混凝土普通水准标石混凝土 、不锈钢标志河北省雄县大营镇西柳永辉奶牛养殖基地院外路边 黄土自霸州市沿津保公路(333省道)西行100km+300m至西柳即可达本点B:39°07.0′L:116°07.2′ 北详细位置图王志祥29.3mⅡXW027 ~ ⅡXW028 4.5km (平地)ⅡXW028 ~ ⅡXW029 0.7km (平地)地面4.点正北1.4m埋有指示碑(17)津 保 公 路沥48.9m(16)47.4m4015孔码村长江勘测规划设计研究院长江勘测规划设计研究院3060标石断面图单位:厘米4020标石质料标石类型70土地使用者地下水深度φ108钢管保 管 人维 修 者维修日期维修单位20040埋 石 者埋石日期埋石单位选 点 者备 注选点日期选点单位接管单位所 在 地详细说明点 位地别土质交通路线经 纬 度所在图幅孔码桥ⅡXW028河北省雄县米北乡小庄村王春生滕传斌3.点正西至016号电线杆47.4m 2.点正南至雄县孔码桥东北角48.9m 1.点正东至017号电线杆29.3m2004年4月17日2004年4月14日10-50-29-丙混凝土普通水准标石混凝土 、不锈钢标志河北省雄县米北乡小庄村津保公路孔码桥北林地 黄土自霸州市沿津保公路(333省道)西行约95km+800m处至孔码桥可达本点B:39°07.6′L:116°10.1′ 北详细位置图王志辉15.2m6.5mⅡXW028 ~ ⅡXW029 0.7km (平地)ⅡXW029 ~ ⅡXW030JS 4.5km (平地)地面4.点正北1.4m埋有指示碑10.9m杨沥4015小庄村长江勘测规划设计研究院长江勘测规划设计研究院点名:3060标石断面图单位:厘米4020标石质料标石类型70土地使用者地下水深度φ108钢管保 管 人维 修 者维修日期维修单位20040南水北调中线工程埋 石 者埋石日期埋石单位选 点 者备 注选点日期选点单位接管单位所 在 地详细说明点 位地别土质交通路线经 纬 度所在图幅二等水准点之记ⅡXW029河北省雄县米北乡小庄村王春生滕传斌3.点西南至涵洞西北角15.2m 2.点西南至涵洞东南角10.9m 1.点正南至农田指示碑东北角6.5m2004年4月17日2004年4月14日ⅡXW02910-50-29-丙混凝土普通水准标石混凝土 、不锈钢标志河北省雄县米北乡小庄村南路边 黄土自霸州市沿津保公路(333省道)西行约95km+800m处孔码桥,再北行700米可达本点B:39°08.0′L:116°10.0′ 北详细位置图6.1mⅡXW030JS17.4m38.2m至霸州至保定至高碑店津保公路厕地面陈刘僧滕传斌2004年9月2004年9月王春生长江勘测规划设计研究院长江勘测规划设计研究院306035120φ108钢管55702006015北比例尺 1:2000单位:厘米标石断面图点名:详细位置图南水北调中线工程二等水准点之记标石类型标石质料地下水深度土地使用者所在图幅经 纬 度所 在 地地别土质保 管 人点 位接管单位详细说明维修单位维 修 者埋石单位埋 石 者选点单位选 点 者备 注查点日期埋石日期交通路线4.点正北1.4m埋有指示碑河北省雄县米北乡板北村3.点正南至涵洞东北角38.2m 2.点东南至小房西北角17.4m 1.点西北至厕所东北角6.1mⅡXW030JS/JX板北村10-50-29-丙混凝土基本水准标石混凝土 、不锈钢标志河北省雄县米北乡板北村路边 黄土自霸州市沿112国道西行至91km处路再北行约100m可达本点B:39°08.5′L:116°12.4′ 维修日期附表2-4:四等水准复测成果 2 水准平差计算 2.1 起算高程点 名等 级标 型85基准高程(m)备 注XW025 Ⅱ普通标9.947XW026 Ⅱ普通标9.850XW027 Ⅱ普通标9.620XW028 Ⅱ普通标9.362XW029 Ⅱ普通标9.678XW030 Ⅱ普通标9.3052.2 平差前水准网点数据编号起止点号实测高差(m) 水准路线长度(m) 备注1 XW025~S01 +1.3670 2131.0 H XW025=9.947m2 S01~S02 +0.0455 353.1 h理=-0.0970m3 S02~S03 +0.1375 368.9 h实=-0.0590m4 S03~S04 -0.2490 340.7 Δh=+0.0380m5 S04~S05 -0.6450 467.5 ΣL=4306.3m6 S05~S06 +0.1680 222.8 Δh限=±0.0415m7 S06~XW026 -0.8830 422.3 H XW026=9.850m8 XW026~S07 +0.5560 470.7 H XW026=9.850m9 S07~S08 -0.2540 328.210 S08~S09 +0.0145 298.411 S09~S10 -0.3420 304.8 h理=-0.2300m12 S10~S11 +0.2020 307.6 h实=-0.2445m13 S11~S12 -0.0120 312.1 Δh=-0.0145m14 S12~S13 -0.0085 232.2 ΣL=4297.0m15 S13~S14 +0.2395 295.4 Δh限=±0.0414m16 S14~S15 -0.5010 463.217 S15~S16 -0.623 412.518 S16~S17 +0.7835 301.119 S17~XW027 -0.2995 570.8 H XW027=9.620m20 XW027~S18 +0.5370 629.3 H XW027=9.620m21 S18~S19 +0.4930 395.722 S19~S20 -0.6770 359.023 S20~S21 +0.2580 355.3 h理=-0.2580m24 S21~S22 +0.1490 368.9 h实=-0.2980m25 S22~S23 -0.1700 375.8 Δh=-0.0400m26 S23~S24 +0.4050 267.8 ΣL=5485.5m27 S24~S25 -2.2570 384.3 Δh限=-0.046828 S25~S26 +1.7570 476.629 S26~S27 -0.1580 325.430 S27~S28 -0.0410 350.031 S28~S29 -0.0880 326.632 S29~S30 +2.2020 324.333 S30~S31 -1.9590 306.234 S31~XW028 -0.7490 240.3 H XW028=9.362m35 XW030~S48 -0.0090 1752.0 H XW030=9.305m36 S48~S47 +0.1160 250.537 S47~S46 +0.3210 255.838 S46~S45 +0.0855 266.339 S45~S44 +0.2460 265.4 h理=+0.0570m40 S44~S43 -0.1535 320.8 h实=+0.0405m41 S43~S42 -0.1215 323.4 Δh=-0.0165m42 S42~S41 -0.2135 332.8 ΣL=7400.1m43 S41~S40 -0.1130 435.2 Δh限=-0.0540m44 S40~S39 +0.1285 300.345 S39~S38 +0.1265 354.946 S38~S37 -0.1355 375.547 S37~S36 +0.1850 370.448 S36~S35 -0.2310 371.749 S35~S34 -0.1240 297.150 S34~S33 +0.6445 361.751 S33~S32 -0.1275 299.752 S32~XW028 -0.5840 466.6 H XW028=9.362m2.3 水准网间接平差编号起止点号实测高差(m) 高差改正数(mm) 平差后高差(m) 备注1 XW025~S01 +1.3670 -18.8 +1.3482 H XW025=9.947m2 S01~S02 +0.0455 -3.1 +0.0424 H XW026=9.850m3 S02~S03 +0.1375 -3.2 +0.1343 H XW028=9.362m4 S03~S04 -0.2490 -3.0 -0.2520 H XW030=9.305m5 S04~S05 -0.6450 -4.1 -0.6491 H XW027=9.620m6 S05~S06 +0.1680 -2.1 +0.16597 S06~XW026 -0.8830 -3.7 -0.88678 XW026~S07 +0.5560 +1.6 +0.55769 S07~S08 -0.2540 +1.1 -0.252910 S08~S09 +0.0145 +1.0 +0.015511 S09~S10 -0.3420 +1.1 -0.340912 S10~S11 +0.2020 +1.0 +0.203013 S11~S12 -0.0120 +1.1 -0.010914 S12~S13 -0.0085 +0.7 -0.007815 S13~S14 +0.2395 +1.0 +0.240516 S14~S15 -0.5010 +1.6 -0.499417 S15~S16 -0.6230 +1.4 -0.621618 S16~S17 +0.7835 +1.0 +0.784519 S17~XW027 -0.2995 +1.9 -0.297620 XW027~S18 +0.5370 +6.7 +0.543721 S18~S19 +0.4930 +4.2 +0.497222 S19~S20 -0.6770 +3.8 -0.673223 S20~S21 +0.2580 +3.8 +0.261824 S21~S22 +0.1490 +3.9 +0.152925 S22~S23 -0.1700 +4.0 -0.166026 S23~S24 +0.4050 +2.9 +0.407927 S24~S25 -2.2570 +4.2 -2.252828 S25~S26 +1.7570 +5.1 +1.762129 S26~S27 -0.1580 +3.5 -0.154530 S27~S28 -0.0410 +3.7 -0.037331 S28~S29 -0.0880 +3.6 -0.084432 S29~S30 +2.2020 -3.5 +2.198533 S30~S31 -1.9590 -3.3 -1.962334 S31~XW028 -0.7490 -2.6 -0.751635 XW030~S48 -0.0090 +3.9 -0.005136 S48~S47 +0.1160 +0.5 +0.116537 S47~S46 +0.3210 +0.6 +0.321638 S46~S45 +0.0855 +0.6 +0.086139 S45~S44 +0.2460 +0.6 +0.246640 S44~S43 -0.1535 +0.8 -0.152741 S43~S42 -0.1215 +0.7 -0.120842 S42~S41 -0.2135 +0.7 -0.212843 S41~S40 -0.1130 +1.0 -0.112044 S40~S39 +0.1285 +0.7 +0.129245 S39~S38 +0.1265 +0.8 +0.127346 S38~S37 -0.1355 +0.8 -0.134747 S37~S36 +0.1850 +0.8 +0.185848 S36~S35 -0.2310 +0.8 -0.230249 S35~S34 -0.1240 +0.7 -0.123350 S34~S33 +0.6445 +0.8 +0.645351 S33~S32 -0.1275 +0.7 -0.126852 S32~XW028 -0.5840 +1.0 -0.58302.4 平差总结及精度评定编号起止点号平差后高差(m) 平差后高程(m) 中误差(mm) 备注1 XW025~S01 +1.3482 H XW025=9.947m=11.2952 ±8.9 H XW026=9.850m2 S01~S02 +0.0424 HS01=11.3376 ±8.5 H XW028=9.362m3 S02~S03 +0.1343 HS024 S03~S04 -0.2520 H=11.4719 ±7.3 H XW030=9.305mS03=11.2199 ±7.1 H XW027=9.620m5 S04~S05 -0.6491 HS04=10.5708 ±7.26 S05~S06 +0.1659 HS057 S06~XW026 -0.8867 H=10.7367 ±6.8S068 XW026~S07 +0.5576=10.4076 ±4.59 S07~S08 -0.2529 HS07=10.1547 ±5.610 S08~S09 +0.0155 HS08=10.1702 ±6.311 S09~S10 -0.3409 HS09=9.8293 ±6.812 S10~S11 +0.2030 HS10=10.0323 ±7.013 S11~S12 -0.0109 HS11=10.0214 ±7.014 S12~S13 -0.0078 HS12=10.0136 ±7.015 S13~S14 +0.2405 HS13=10.2541 ±7.316 S14~S15 -0.4994 HS1417 S15~S16 -0.6216 H=9.7547 ±6.6S1518 S16~S17 +0.7845 H=9.1331 ±5.8S1619 S17~XW027 -0.2976 H=9.9176 ±4.9S1720 XW027~S18 +0.543721 S18~S19 +0.4972 H=10.1637 ±5.8S18=10.6609 ±7.1 22 S19~S20 -0.6732 HS19=9.9877 ±7.9 23 S20~S21 +0.2618 HS20=10.2495 ±8.5 24 S21~S22 +0.1529 HS21=10.4024 ±8.9 25 S22~S23 -0.1660 HS22=10.2364 ±9.1 26 S23~S24 +0.4079 HS2327 S24~S25 -2.2528 H=10.6443 ±9.2S24=8.3915 ±9.1 28 S25~S26 +1.7621 HS2529 S26~S27 -0.1545 H=10.1536 ±8.7S2630 S27~S28 -0.0373 H=9.9991 ±8.2S2731 S28~S29 -0.0844 H=9.9618 ±7.5S28=9.8774 ±6.6 32 S29~S30 +2.1985 HS2933 S30~S31 -1.9623 H=12.0759 ±5.4S3034 S31~XW028 -0.7516 H=10.1136 ±3.7S3135 XW030~S48 -0.005136 S48~S47 +0.1165 H=9.2999 ±7.0S4837 S47~S46 +0.3216 H=9.4164 ±7.3S4738 S46~S45 +0.0861 H=9.7380 ±7.6S46=9.8241 ±7.8 39 S45~S44 +0.2466 HS45=10.0707 ±8.0 40 S44~S43 -0.1527 HS44=9.9180 ±8.1 41 S43~S42 -0.1208 HS4342 S42~S41 -0.2128 H=9.7972 ±8.2S42=9.5844 ±8.2 43 S41~S40 -0.1120 HS4144 S40~S39 +0.1292 H=9.4724 ±8.1S40=9.6016 ±8.0 45 S39~S38 +0.1273 HS39=9.7289 ±7.8 46 S38~S37 -0.1347 HS3847 S37~S36 +0.1858 H=9.5942 ±7.5S37=9.7800 ±7.1 48 S36~S35 -0.2302 HS36=9.5498 ±6.5 49 S35~S34 -0.1233 HS35=9.4265 ±5.9 50 S34~S33 +0.6453 HS34=10.0718 ±5.0 51 S33~S32 -0.1268 HS33=9.9450 ±4.0 52 S32~XW028 -0.5830 HS32。
GPS网平差

GPS网平差进行GPS网平差的目的主要有三个:(1)消除由观测量和已知条件中存在的误差所引起的GPS 网在几何上的不一致。
包括闭合环闭合差不为0;复测基线较差不为0;通过由基线向量所形成的导线,将坐标由一个已知点传算到另一个已知点的符合差不为0等。
通过网平差,可以消除这些不一致.(2)改善GPS网的质量,评定GPS网的精度。
通过网平差,可得出一系列可用于评估GPS网的精度指标,如观测值改正数、观测值验后方差等等。
结合这些精度指标,还可以设法确定出可能存在粗差或质量不佳的观测值,并对它们进行相应的处理,从而达到改善网的质量的目的.(3)确定GPS网中点在指定参照系下的坐标以及其他所需参数的估值。
通常,无法通过某个单一类型的网平差过程来达到上述三个目的,而必须分阶段采用不同类型的网平差方法。
根据进行网平差时所采用的观测量和已知条件的类型和数量,可将网平差分为最小约束平差/自由网平差、约束平差和联合平差三种类型。
这三种类型网平差除了都能消除由于观测值和已知条件所引起的网在几何上的不一致外,还具有各自不同的功能。
无约束平差能够被用来评定网的内符合精度和探测处理粗差,而约束平差和联合平差则能够确定点在制定参照系下的坐标。
根据进行平差时所采用坐标系的类型,GPS网平差还可以分为三维平差和二维平差.在使用数据处理软件进行GPS网平差时,需要进行以下四个步骤:1、基线向量提取2、三维无约束平差3、约束平差/联合平差4、质量分析与控制基线向量提取:要进行GPS网平差,首席必须提取基线向量,构建GPS基线向量网.提取基线向量时,需要遵循以下几项原则:(1)必须选取相互独立的基线,若选取了不相互独立的基线,则平差结果会与真实的情况不相符合.(2)所选取的基线应构成闭合的几何图形.(3)选取质量好的基线向量,基线质量好坏可以依据RMS、RDOP、Ratio、同步环闭合差、异步环闭合差及重复基线较差来判定。
(4)选取能构成边数较少的异步环的基线向量.(5)选取边长较短的基线向量.三维无约束平差GPS网的最小约束平差/自由网平差中所采用的观测量完全为GPS基线向量,平差通常在与基线向量相同的地心地固系下进行。
GPS网平差报告
目录第一章项目属性 (1)第二章坐标系统 (1)第三章GPS网图 (2)第四章基线简表 (2)第五章基线祥解 (3)5.1 GPS1→GPS2 (3)5.2 GPS1→GPS3 (6)5.3 GPS1→GPS4 (9)5.4 GPS2→GPS3 (12)5.5 GPS2→GPS4 (15)5.7 GPS3→GPS4 (18)第六章重复基线 (21)第七章同步环 (21)第八章异步环 (22)第九章基线总结 (22)9.1 相对误差最大值 (22)9.2 绝对误差最大值 (22)第十章WGS-84三维无约束平差 (23)10.1 平差参数 (23)10.2 平差基线边 (23)10.3 T 检验列表 (23)10.4 自由网平差坐标 (24)第十一章WGS-84三维约束平差 (24)11.1 平差参数 (24)11.2 平差基线边 (24)10.3 三维约束平差坐标 (25)第十二章二维平差 (25)12.1 平差参数 (25)12.2 平面距离平差值 (26)12.3 平面坐标 (26)12.4 最弱点平面中误差 (26)第十三章高程拟合 (27)13.1 平差参数 (27)13.2 拟合坐标 (27)第十四章平差总结 (27)14.1 平面距离平差值 (27)14.2 最终坐标平差值 (28)14.3 最弱点平面中误差 (28)14.4 三维约束平差坐标 (28)第一章项目属性项目名称:控制测量实习E级GPS控制网项目单位:湖南城市学院施工单位:1002601班第三组负责人:翟彬彬控制网等级:E级测量员:翟彬彬、黄宇、谷荣明、杨光叶、吴光会、李洪宇、黄琛计算员:翟彬彬开始日期:2013/9/13结束日期:2013/9/16备注:第二章坐标系统坐标系名称:中国-北京54-28N-112E椭球长半轴 a:6378245.000000椭球扁率 f:1/298.300000投影名称: 高斯3度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:028:00:00.000000N中央子午线:112:00:00.000000E第三章GPS网图第四章基线简表第五章基线祥解5.1 GPS1→GPS2固定站未知站------------------------------------------------------------------------ 站名: GPS1 GPS2 WGS84 天线高: 1.606 m 1.725 m WGS84 纬度: 28:32:18.00331N 28:32:55.74308N WGS84 经度: 112:22:35.25932E 112:22:38.18864E WGS84 高程: 64.135 m 56.352 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:24:15结束时间:2013年09月13日 06:30:15历元间隔:77795904 秒历元数 127卫星号 1 17 7 28 20 8 9 11 32 4开始 0 0 0 0 0 0 0 0 7 53结束 115 126 52 126 126 105 96 65 113 126基准卫星:28三差解-----------------------------------------------------------------------MEASUREMENTS : 1684 REJECTED : 32 RMS : 0.0134Baseline : 143.5848 -549.1371 1017.7395 1165.3162Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°32'55.7729" N 112°22'38.0653" E 56.3524Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2134622.1199 m 5184826.2908 m 3030152.0579 m Variance covariance matrix:x y zx 0.160834E -0.159928E 0.098561Ey 0.260490E -0.154603Ez 0.479630E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 1686 REJECTED : 13 RMS : 0.0138Baseline : 141.0689 -551.8025 1017.1362 1165.7412Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°32'55.7790" N 112°22'38.1882" E 54.7404Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2134624.6358 m 5184823.6254 m 3030151.4546 m Variance covariance matrix:x y zx 0.078850E 0.046589E -0.001572Ey 0.052518E 0.010426Ez 0.012030E卫星号模糊度方差模糊度方差1 -2032.0 0.0159 -1583.0 0.012417 -3001.0 0.0122 -2338.0 0.00957 -7814.0 0.0132 -6088.0 0.010320 -7438.1 0.0189 -5795.0 0.01478 -4704.0 0.0124 -3665.0 0.00969 -5083.0 0.0138 -3960.0 0.010811 -197.1 0.0219 -153.1 0.017132 -4211.1 0.0252 -3276.1 0.01964 -7628.9 0.0197 -5901.9 0.0154---------------------整周模糊度分解-----------------------------****** Ratio = 61.1 ******1 0.0 -1.0 -2032.0 0.016 | 0.0 0.0 -1583.0 0.01217 0.0 0.0 -3001.0 0.012 | 0.0 0.0 -2338.0 0.0107 0.0 0.0 -7814.0 0.013 | 0.0 0.0 -6088.0 0.01020 0.0 0.0 -7438.0 0.019 | 0.0 0.0 -5795.0 0.0158 0.0 0.0 -4704.0 0.012 | 0.0 0.0 -3665.0 0.0109 0.0 0.0 -5083.0 0.014 | 0.0 0.0 -3960.0 0.01111 0.0 0.0 -197.0 0.022 | 0.0 0.0 -153.0 0.01732 0.0 0.0 -4211.0 0.025 | 0.0 0.0 -3276.0 0.0204 0.0 0.0 -7629.0 0.020 | 0.0 0.0 -5902.0 0.015双差整数解----------------------------------------------------------------------- MEASUREMENTS : 1687 REJECTED : 12 RMS : 0.0143Baseline : 141.0562 -551.8129 1017.1340 1165.7426Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°32'55.7790" N 112°22'38.1888" E 54.7352Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2134624.6485 m 5184823.6150 m 3030151.4523 m Variance covariance matrix:x y zx 0.002963E -0.001920E -0.000568Ey 0.004162E 0.000992Ez 0.001550E------基线处理详解完毕-----5.2 GPS1→GPS3固定站未知站------------------------------------------------------------------------ 站名: GPS1 GPS3 WGS84 天线高: 1.606 m 1.540 m WGS84 纬度: 28:32:18.00331N 28:34:10.09600N WGS84 经度: 112:22:35.25932E 112:20:51.06211E WGS84 高程: 64.135 m 52.760 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:22:45结束时间:2013年09月13日 06:29:45历元间隔:77795904 秒历元数 128卫星号 1 17 7 28 8 9 11 32 20 4开始 0 0 0 0 0 0 0 9 21 52结束 111 127 53 127 106 97 63 79 127 127基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1232 REJECTED : 86 RMS : 0.0907Baseline : 3254.9010 -437.2161 3032.1496 4469.8400Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'10.0172" N 112°20'50.6410" E 70.5766Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2131510.8037 m 5184938.2118 m 3032166.4680 m Variance covariance matrix:x y zx 0.126233E -0.113511E 0.063524Ey 0.166403E -0.116755Ez 0.428541E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 658 REJECTED : 5 RMS : 0.0095Baseline : 3250.8681 -456.7507 3025.5400 4464.3764Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'10.0855" N 112°20'51.0515" E 52.8949Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2131514.8367 m 5184918.6772 m 3032159.8584 mVariance covariance matrix:x y zx 0.189923E -0.258205E -0.160006Ey 3.933237E 1.924419Ez 0.962913E卫星号模糊度方差模糊度方差17 -297.0 0.0176 -232.0 0.013732 -32243.1 0.0806 -25124.1 0.062620 2895566.9 0.0507 2265357.0 0.039332 -32243.1 0.0806 -25124.1 0.0626----------------------整周模糊度分解-----------------------------****** Ratio = 48.1 ******17 0.0 1.0 -297.0 0.018 | 0.0 0.0 -232.0 0.01432 0.0 0.0 -32243.0 0.081 | 0.0 0.0 -25124.0 0.06320 0.0 0.0 2895567.0 0.051 | 0.0 0.0 2265357.0 0.03932 0.0 0.0 -32243.0 0.081 | 0.0 0.0 -25124.0 0.063双差整数解-----------------------------------------------------------------------MEASUREMENTS : 658 REJECTED : 5 RMS : 0.0105Baseline : 3250.8521 -456.7606 3025.5383 4464.3647Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'10.0855" N 112°20'51.0522" E 52.8914Sta. name WGS84_X WGS84_Y WGS84_Z起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2131514.8526 m 5184918.6673 m 3032159.8567 m Variance covariance matrix:x y zx 0.009304E -0.006352E -0.007231Ey 0.014759E 0.000997Ez 0.013542E------基线处理详解完毕-----5.3 GPS1→GPS4固定站未知站------------------------------------------------------------------------ 站名: GPS1 GPS4 WGS84 天线高: 1.606 m 1.727 m WGS84 纬度: 28:32:18.00331N 28:34:12.18558N WGS84 经度: 112:22:35.25932E 112:20:10.52650E WGS84 高程: 64.135 m 37.092 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:22:45结束时间:2013年09月13日 06:29:45历元间隔:77795904 秒历元数 128卫星号 1 17 7 28 8 9 11 20 32 4开始 0 0 0 0 0 0 0 7 9 52结束 117 127 53 127 106 97 67 127 114 127基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1689 REJECTED : 37 RMS : 0.0326Baseline : 4291.1711 -74.2000 3075.7920 5280.1658Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'12.1655" N 112°20'10.2974" E 40.3757Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2130474.5337 m 5185301.2279 m 3032210.1104 m Variance covariance matrix:x y zx 0.163295E -0.159814E 0.100846Ey 0.259202E -0.154211Ez 0.483687E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 1501 REJECTED : 86 RMS : 0.0139Baseline : 4287.7723 -81.3088 3073.6376 5276.2534Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'12.1861" N 112°20'10.5125" E 34.7049Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2130477.9324 m 5185294.1191 m 3032207.9559 m Variance covariance matrix:x y zx 0.078815E 0.045023E -0.002615Ey 0.058486E 0.013736Ez 0.014111E卫星号模糊度方差模糊度方差1 -19799.1 0.0162 -15428.1 0.012617 2755.0 0.0124 2147.0 0.00977 -25923.1 0.0139 -20200.0 0.01098 -11102.1 0.0132 -8650.0 0.00989 -10360.0 0.0140 -8072.0 0.010920 -41812.2 0.0191 -32515.2 0.014932 -39352.3 0.0258 -30663.2 0.02024 -15141.0 0.0197 -11797.9 0.0153----------------------整周模糊度分解-----------------------------****** Ratio = 16.7 ******1 0.0 -1.0 -19799.0 0.016 | 0.0 0.0 -15428.0 0.01317 0.0 0.0 2755.0 0.012 | 0.0 0.0 2147.0 0.0107 0.0 0.0 -25923.0 0.014 | 0.0 0.0 -20200.0 0.0118 0.0 0.0 -11102.0 0.013 | 0.0 0.0 -8650.0 0.0109 0.0 0.0 -10360.0 0.014 | 0.0 0.0 -8072.0 0.01120 0.0 0.0 -41812.0 0.019 | 0.0 0.0 -32515.0 0.01532 0.0 0.0 -39352.0 0.026 | 0.0 0.0 -30663.0 0.0204 0.0 0.0 -15141.0 0.020 | 0.0 0.0 -11798.0 0.015双差整数解-----------------------------------------------------------------------MEASUREMENTS : 1503 REJECTED : 84 RMS : 0.0159Baseline : 4287.7498 -81.3488 3073.6185 5276.2246Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'12.1860" N 112°20'10.5138" E 34.6708Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2130477.9550 m 5185294.0790 m 3032207.9368 m Variance covariance matrix:x y zx 0.003116E -0.001993E -0.000641Ey 0.004804E 0.001237Ez 0.001790E------基线处理详解完毕-----5.4 GPS2→GPS3固定站未知站------------------------------------------------------------------------ 站名: GPS2 GPS3 WGS84 天线高: 1.725 m 1.540 m WGS84 纬度: 28:32:55.74308N 28:34:10.09600N WGS84 经度: 112:22:38.18864E 112:20:51.06211E WGS84 高程: 56.352 m 52.760 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:24:15结束时间:2013年09月13日 06:30:15历元间隔:77795904 秒历元数 127卫星号 1 32 17 7 8 9 28 20 4开始 0 0 0 0 0 0 0 33 56结束 54 65 126 52 105 96 126 126 126基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1224 REJECTED : 86 RMS : 0.0693Baseline : 3107.4632 106.1853 2012.8647 3703.9475Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'10.0030" N 112°20'50.9757" E 66.4633Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2131517.9228 m 5184931.6051 m 3032164.1174 m Variance covariance matrix:x y zx 0.124208E -0.110991E 0.063743Ey 0.162324E -0.116360Ez 0.427795E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 654 REJECTED : 4 RMS : 0.0120Baseline : 3109.7869 95.0344 2008.4048 3703.1737Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'10.0497" N 112°20'51.0526" E 54.4969Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2131515.5991 m 5184920.4543 m 3032159.6574 m Variance covariance matrix:x y zx 0.258329E -0.106501E -0.082109Ey 0.744549E 0.327180Ez 0.163084E卫星号模糊度方差模糊度方差32 -2260261.9 0.0536 -3596104.9 0.041717 3011.0 0.0209 2346.0 0.016320 2903276.0 0.0296 2270512.1 0.02304 2922198.0 0.0301 2285214.0 0.023432 -2260281.9 0.0465 -3596104.9 0.0363----------------------整周模糊度分解-----------------------------****** Ratio = 13.4 ******32 0.0 1.0 -2260262.0 0.054 | 0.0 0.0 -3596105.0 0.04217 0.0 0.0 3011.0 0.021 | 0.0 0.0 2346.0 0.01620 0.0 0.0 2903276.0 0.030 | 0.0 0.0 2270512.0 0.0234 0.0 0.0 2922198.0 0.030 | 0.0 0.0 2285214.0 0.02332 0.0 0.0 -2260282.0 0.047 | 0.0 0.0 -3596105.0 0.036双差整数解-----------------------------------------------------------------------MEASUREMENTS : 654 REJECTED : 4 RMS : 0.0130Baseline : 3109.7902 95.0503 2008.4124 3703.1811Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'10.0498" N 112°20'51.0523" E 54.5123Sta. name WGS84_X WGS84_Y WGS84_Z起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2131515.5958 m 5184920.4702 m 3032159.6650 m Variance covariance matrix:x y zx 0.004772E -0.004500E -0.001051Ey 0.016763E 0.000114Ez 0.006924E------基线处理详解完毕-----5.5 GPS2→GPS4固定站未知站------------------------------------------------------------------------ 站名: GPS2 GPS4 WGS84 天线高: 1.725 m 1.727 m WGS84 纬度: 28:32:55.74308N 28:34:12.18558N WGS84 经度: 112:22:38.18864E 112:20:10.52650E WGS84 高程: 56.352 m 37.092 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:24:15结束时间:2013年09月13日 06:30:15历元间隔:77795904 秒历元数 127卫星号 1 32 17 7 8 9 11 28 20 4开始 0 0 0 0 0 0 0 0 6 55结束 115 113 126 52 105 96 65 126 126 126基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1670 REJECTED : 54 RMS : 0.0287Baseline : 4148.2094 475.9462 2058.2775 4655.1770Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'12.1314" N 112°20'10.3854" E 41.0924Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2130477.1766 m 5185301.3660 m 3032209.5301 m Variance covariance matrix:x y zx 0.161662E -0.159688E 0.099316Ey 0.258509E -0.154935Ez 0.479650E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 1663 REJECTED : 44 RMS : 0.0150Baseline : 4146.7018 470.4929 2056.5025 4652.4942Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'12.1502" N 112°20'10.5130" E 36.3169Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2130478.6842 m 5185295.9128 m 3032207.7551 m Variance covariance matrix:x y zx 0.076806E 0.045444E -0.001605Ey 0.052375E 0.010847Ez 0.012530E卫星号模糊度方差模糊度方差1 -17360.1 0.0172 -13528.1 0.013432 -2267482.2 0.0274 -3601732.1 0.021317 6090.0 0.0132 4745.0 0.01037 -18084.1 0.0163 -14092.1 0.01278 -6421.0 0.0134 -5004.0 0.01049 -5290.0 0.0149 -4123.0 0.011711 -17482.1 0.0237 -13623.1 0.018520 -34289.2 0.0203 -26716.1 0.01584 -6812.1 0.0213 -5251.0 0.0166----------------------整周模糊度分解-----------------------------****** Ratio = 16.7 ******1 0.0 1.0 -17360.0 0.017 | 0.0 0.0 -13528.0 0.01332 0.0 0.0 -2267482.0 0.027 | 0.0 0.0 -3601732.0 0.02117 0.0 0.0 6090.0 0.013 | 0.0 0.0 4745.0 0.0107 0.0 0.0 -18084.0 0.016 | 0.0 0.0 -14092.0 0.0138 0.0 0.0 -6421.0 0.013 | 0.0 0.0 -5004.0 0.0109 0.0 0.0 -5290.0 0.015 | 0.0 0.0 -4123.0 0.01211 0.0 0.0 -17482.0 0.024 | 0.0 0.0 -13623.0 0.01820 0.0 0.0 -34289.0 0.020 | 0.0 0.0 -26716.0 0.0164 0.0 0.0 -6812.0 0.021 | 0.0 0.0 -5251.0 0.017双差整数解-----------------------------------------------------------------------MEASUREMENTS : 1660 REJECTED : 47 RMS : 0.0160Baseline : 4146.6935 470.4646 2056.4848 4652.4761Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'12.1501" N 112°20'10.5137" E 36.2882Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2130478.6925 m 5185295.8845 m 3032207.7374 m Variance covariance matrix:x y zx 0.002954E -0.001926E -0.000533Ey 0.004164E 0.000993Ez 0.001682E------基线处理详解完毕-----5.7 GPS3→GPS4固定站未知站------------------------------------------------------------------------ 站名: GPS3 GPS4 WGS84 天线高: 1.540 m 1.727 m WGS84 纬度: 28:34:10.09600N 28:34:12.18558N WGS84 经度: 112:20:51.06211E 112:20:10.52650E WGS84 高程: 52.760 m 37.092 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:22:45结束时间:2013年09月13日 06:29:45历元间隔:77795904 秒历元数 128卫星号 1 17 32 7 8 9 11 28 20 4开始 0 0 0 0 0 0 0 0 35 58结束 56 127 67 53 106 97 8 127 127 127基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1239 REJECTED : 95 RMS : 0.0401Baseline : 1042.1880 372.5593 45.4348 1107.7096Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°34'10.0960" N 112°20'51.0621" E 52.7601终止点 : 28°34'12.1933" N 112°20'10.3835" E 29.1915Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2131514.9990 m 5184918.3155 m 3032160.0776 m终止点 : -2130472.8110 m 5185290.8748 m 3032205.5124 m Variance covariance matrix:x y zx 0.128255E -0.113583E 0.066431Ey 0.163991E -0.118001Ez 0.431799E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 701 REJECTED : 5 RMS : 0.0084Baseline : 1036.9211 375.4374 48.0778 1103.8433Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°34'10.0960" N 112°20'51.0621" E 52.7601终止点 : 28°34'12.1962" N 112°20'10.5225" E 34.5514Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2131514.9990 m 5184918.3155 m 3032160.0776 m终止点 : -2130478.0780 m 5185293.7528 m 3032208.1554 m Variance covariance matrix:x y zx 0.195377E -0.055838E -0.057972Ey 0.606968E 0.262139Ez 0.132214E卫星号模糊度方差模糊度方差17 3053.0 0.0126 2379.0 0.009832 -7265.1 0.0301 -5661.2 0.023520 -2936560.1 0.0192 -2296446.1 0.01504 -2928848.0 0.0186 -2290440.0 0.0145----------------------整周模糊度分解-----------------------------****** Ratio = 28.4 ******17 0.0 0.0 3053.0 0.013 | 0.0 0.0 2379.0 0.01032 0.0 1.0 -7265.0 0.030 | 0.0 0.0 -5661.0 0.02320 0.0 0.0 -2936560.0 0.019 | 0.0 0.0 -2296446.0 0.0154 0.0 0.0 -2928848.0 0.019 | 0.0 0.0 -2290440.0 0.014双差整数解-----------------------------------------------------------------------MEASUREMENTS : 706 REJECTED : 0 RMS : 0.0111Baseline : 1036.9079 375.4047 48.0676 1103.8193Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°34'10.0960" N 112°20'51.0621" E 52.7601终止点 : 28°34'12.1963" N 112°20'10.5235" E 34.5243Sta. name WGS84_X WGS84_Y WGS84_Z起始点 : -2131514.9990 m 5184918.3155 m 3032160.0776 m终止点 : -2130478.0911 m 5185293.7201 m 3032208.1452 mVariance covariance matrix:x y zx 0.004528E -0.004650E -0.001030E y 0.016136E -0.000203E z 0.005791E ------基线处理详解完毕-----第六章重复基线第七章同步环第八章异步环第九章基线总结9.1 相对误差最大值9.2 绝对误差最大值第十章WGS-84三维无约束平差10.1 平差参数参考因子:1.00χ平方检验(α=95%):通过自由度:910.2 平差基线边10.3 T 检验列表10.4 自由网平差坐标第十一章WGS-84三维约束平差11.1 平差参数网的参考因子: 1.001911.2 平差基线边10.3 三维约束平差坐标第十二章二维平差12.1 平差参数迭代次数:2网的参考因子: 1.0019x向平移: 1016.8755米y向平移: -195733.1357米比例: 0.0000ppm 旋转: 0.0000秒12.2 平面距离平差值12.3 平面坐标12.4 最弱点平面中误差第十三章高程拟合13.1 平差参数迭代次数:1网的参考因子: 0.0000参考点:GPS2H = H0 + AA = -26.352313.2 拟合坐标第十四章平差总结14.1 平面距离平差值14.2 最终坐标平差值14.3 最弱点平面中误差14.4 三维约束平差坐标。
GPS网平差中几个问题的分析探讨
G S网平差 , P 求得的尺度 比参数 K 值见表 1 。
表 1 尺 度 比 参 数 K 值
已知 起 算 点
0 .6 ‘ 11 0 ,7 1 1 0 ,1 12 2 1 1 6, 7
K 值 /p pm
1 0 5 2 85 9 5 32 .6 9 2 34 4 l 0 30 4. 7
GP S网平 差 中几 个 问题 的分 析 探 讨
王 洪
摘 要 : 合 各 个 工 程 实 例 , G S网平 差 中 已知 起 算 点 坐 标 的兼 容 性 、 线 向量 的 相 关 性 及 其 对 平 差 成 果 精 度 的影 响 结 对 P 基 和 G S网空 间平 差 这 几 个 问题 进 行 了分 析 , 出 了各 个 问题 的 解 决 方 案 。 P 提 关键词 : 容性分析 , 线向量, 关性 , 间平差 , 兼 基 相 空 转换 参 数 中图 分 类 号 : U18 T 9 文献标识码 : A
1 22 6, 1
1 22 7, 1
1 3 67 4. 2
76 24 .4
l , r l 50 , 台 T i e 8 0l台 其中还利 用 了合 肥市 卫星定位 服务 系统 mb
设 计 了一 组 建 筑 , 筑 内 集 合 了 咖 啡 屋 、 吧 、 吧 、 卖 等 , 人 景观水乳 交融 。晋商 会馆 区位 于公 园西 北部 的 湖 区旁 , 历史 建 酒 书 小 游 在
GPS控制网平差总结材料报告材料
西南林业大学《全球卫星定位系统原理》GPS控制网平差实习(2012级)题目静态GPS控制网平差总结报告学院土木工程学院专业测绘工程学号20120456023学生姓名施向文任课教师朱毅西南林业大学土木工程学院测绘工程系2015年07月12 日目录1 实习目的 (1)2 实习任务 (1)3 数据处理依据 (1)4 精度要求 (1)5 已有成果数据 (1)6 数据处理过程 (2)6.1创建作业及数据导入 (2)6.2基线预处理 (2)6.2.1静态基线处理设置 (2)6.2.2处理基线 (3)6.2.3搜索闭合环 (3)6.3设置坐标系 (3)6.4网平差 (3)6.5高程内外符合精度检验 (4)6.5.1内符合精度 (4)6.5.2外符合精度 (4)7 数据处理成果 (4)7.1二维平面坐标平差 (4)7.1.1 平差参数 (4)7.1.2 平面坐标 (5)7.2高程拟合 (8)7.2.1 平差参数 (8)7.2.2 外符合精度 (8)7.2.3内符合精度 (9)8 质量简评 (12)9 总结 (12)静态GPS网平差总结报告1 实习目的通过对静态GPS控制网的数据处理,从实践中加深对理论知识的理解。
通过本次实习还可以熟悉GPS数据处理软件,现在的数据处理基本用软件处理,使用软件也是必备的一个技能。
2 实习任务本次实习的任务:(1)静态GPS外业数据基线预处理,预处理基线的方差比应尽量调整在99.9,处理后搜索闭合环要基本合格。
(2)选择/建立坐标系,建立昆明87坐标系。
(3)输入已知点并进行网平差,检测内外符合精度。
(4)撰写数据处理总结报告。
3 数据处理依据依据《卫星定位城市测量技术规范CJJ/T 73—2010》备案号J990—20104 精度要求二维平差中误差1cm高程拟合中误差2cm高程内符合中误差3cm高程外符合中误差5cm5 已有成果数据(1)静态GPS外业数据成果(RINEX)(2)已知点的三维坐标,坐标成果见下表表1 已知控制点坐标点号X(m)Y(m)H(m)TSB 670004.152 899913.8943 1009.044DJYK 652213.658 898844.48 1375.791H127 655917.673 909706.419 1108.928IV01 670404.9398 901947.6586 1315.4534IV02 667931.4052 900542.1124 1005.1517IV03 668521.1755 899377.7047 1151.3336IV04 666437.0717 902176.1222 982.3909IV05 664666.8748 900615.7946 1066.561IV06 665733.8472 899464.8511 1317.1118IV07 667009.0735 900121.3268 1097.8123IV08 665263.708 897821.5395 1450.8807IV09 663985.2496 898502.3019 1482.0786IV10 666699.5746 897145.7693 1323.7646 数据处理过程数据处理使用中海达HDS2003数据处理软件包6.1创建作业及数据导入新建项目包括项目基本信息和项目属性。
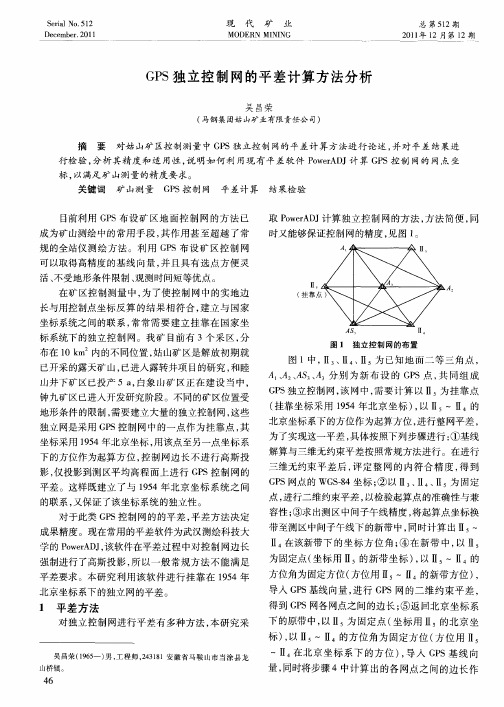
GPS独立控制网的平差计算方法分析
点, 进行 二维 约束平 差 , 以检验 起算 点 的准确 性与兼 容性 ; 求 出测 区中 间子 午线 精度 , ③ 将起 算点 坐标换 带至测 区 中问子午 线下 的新 带 中 , 时计 算 出 Ⅱ ~ 同
Ⅱ 在该新带下 的坐标方位 角; ④在新带 中 , Ⅱ 以 为固定点( 坐标用 Ⅱ 的新带坐标 ) 以 Ⅱ , ~Ⅱ 的 方位角为固定方位 ( 方位用 Ⅱ ~Ⅱ 的新带方位 ) ,
球 面改正对 边长 的影 响为 1 100 0 / 6 0 。
() 3 椭球 面改 正 与高 斯投 影 的 综合 影 响 。运用 上面 的方 法 , 高斯 投影 的影 响减弱 到 了最小 , 而椭球 面 改 正 无 法 消 除 , 两 者 对 边 长 的 综 合 改 正 为 即
一
1. 23mm( 以基线 边长 为 1 m 计算 , 测 区 中间 0k 距
摘 要 对姑 山矿 区控 制 测量 中 G S独立控 制 网的 平差计 算 方 法进行 论 述 , P 并对 平 差 结果进 行检 验 , 分析 其精 度 和 适 用性 , 明如 何 利 用现 有 平 差 软件 Pw rD 说 o eA J计 算 G S控 制 网的 网点 坐 P
标, 以满足矿 山测量 的精度 要 求。
时一定 要考 虑此项 改 正 的大 小 。高海拔 地 区此方法 不 适用 , 以建议 不要使 用此 方法 。 所
4 结 语
在 低海 拔地 区 , 用此 方 法 , 可 以快 速平 差 , 运 既
注 : 为全站仪 的实际测量角度 ;5为根据平差 坐标反算 的角 A A
又满足独立控制网的精度要求 , 但在高海拔地区 , 椭
对边 长 的改正非 常小 , 以忽 略不计 。 可 根据 高 斯 投影 公 式 , 当距 测 区 中间子 午线 最 远 的基 线 边 长 为 1 m、 测 区 中 问子 午线 的最 远距 0k 距 离为 2 m时 , 0k 由该方 法计 算 出的边 长 中 , 斯投影 高
GPS平差报告分析.doc
GPS平差报告分析.doc平差报告§1 项目信息§1.1 项目属性§1.2 坐标系统坐标系名称:中国-高坪椭球长半轴 a:6378140.000000 椭球扁率 f:1/298.257000 投影名称:高斯三度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:000:00:00.000000N 中央子午线:108:00:00.000000E §1.3 WGS84到当地椭球固定转换参数参数计算结果转换模型:布尔莎DX(m)= 0.000000DY(m)= 0.000000DZ(m)= 0.000000WX(秒)= 0.00000WY(秒)= 0.00000WZ(秒)= 0.00000K(ppm)= 0.000000§2 WGS-84三维无约束平差§2.1 平差参数参考因子:1.00χ平方检验(α=95%):通过自由度:18 §2.2 平差基线边§2.3 T 检验列表§2.4 自由网平差坐标§3 二维平差§3.1 平差参数迭代次数:2网的参考因子: 0.9998x向平移:-6.8022米y向平移:-113.2538米比例:-7.5473ppm 旋转: -0.7118秒§3.2 平面距离平差值基线最弱边相对中误差§3.3 平面坐标最弱点平面中误差§4 高程拟合§4.1 平差参数迭代次数:2网的参考因子:1549.3762 参考点:EP11H = H0 + AA = 7.68412§4.2 拟合坐标§5 平差总结§5.1 最终平面距离平差值基线最弱边相对中误差§5.2 最终坐标平差值最弱点平面中误差GPS成果表坐标系为西安80坐标系统。
GPS D级静态网平差精度分析
GPS D级静态网平差精度分析摘要:随着卫星定位技术的不断成熟,也在多个行业得到普遍的应用。
对其精度分析研究也显得尤为重要,以给经济等方面带来更深远的意义,因此本文结合广西全州东山GPS D级控制网的应用实践,分析了GPS D级控制网相关精度的分析情况,以提供参考价值。
关键词:GPS;D级静态网;平差精度1 项目概况广西全州东山GPS D级控制网,由广西二一五地质队进行施工完成。
本次项目中本次利用GPS技术施测D级GPS网6点,充分利用原有的四等三角网中的点位,以广西测绘局施测的C级GPS控制点作为本网的起算数据,应用中国-DONGSHAN-111坐标系。
1.1坐标系统基本规定坐标系名称:中国-DONGSHAN-111椭球长半轴a:6378245.000000椭球扁率f:1/298.300000投影名称:高斯三度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:000:00:00.000000N中央子午线:111:00:00.000000ED级点高程为二等水准,经过检验,精度达到四等水准精度的要求。
1.2 作业技术依据《全球定位系统(GPS)测量规范》(GB/T18314-2001);《全球定位系统城市测量技术规程》(CJJ 73—97);《测绘技术设计规定》(CH/T1004-2005);《国家三、四等水准测量规范》(GB 12898—91);2GPS控制网的布设和数据观测2.1GPS控制网的布设本D级GPS网控制的测区面积为50平方公里相对来说并不大,除矿区外,还有村镇不相接其它区域,整体上其形状非常不规则,交通不是很方便,属于边远高寒山区。
这决定了其网形需坚强、点位精度分布均匀及点位密度适当,平面精度为D级GPS,同时高程拟合精度要达到四等水准测量的精度要求。
在此基础上,D级GPS控制网的网状应设计为几何图形,且均为三角形,整体上表现为多边形。
GPS平差报告分析

平差报告§1项目信息§ 1.1项目属性项目名称:园区大道施工单位:湖南长大建设集团股份有限公司控制网等级:E测量员:兰非计算员:易祖星开始日期:2015.9.15结束日期:2015.9.15备注:§ 1.2坐标系统坐标系名称:中国-咼坪椭球长半轴a: 6378140.000000 椭球扁率f: 1/298.257000投影名称:高斯三度带投影尺度:1.000000 投影高:0.000000X 加常数:0.000000 Y 加常数:500000.000000平均纬度:000:00:00.000000N 中央子午线:108:00:00.000000E § 1.3 WGS8到当地椭球固定转换参数参数计算结果转换模型:布尔莎DX(m)= 0.000000DY(m)= 0.000000DZ(m)= 0.000000WX秒)=0.00000WY秒)=0.00000WZ秒)= 0.00000K(ppm)= 0.000000§2 WGS-8三维无约束平差§ 2.1平差参数参考因子:1.00X平方检验(a =95%):通过自由度:18§ 2.2平差基线边§ 2.3 T检验列表<fT啊检鲨直方图§ 2.4自由网平差坐标§3二维平差§ 3.1平差参数迭代次数:2网的参考因子:0.9998x向平移:-6.8022 米y向平移:-113.2538 米比例:-7.5473ppm 旋转:-0.7118 秒§ 3.2平面距离平差值§ 3.3平面坐标§4高程拟合§ 4.1平差参数迭代次数:2网的参考因子:1549.3762 参考点:EP11H = H0 + AA = 7.68412§ 4.2拟合坐标§5平差总结§ 5.1最终平面距离平差值§ 5.2最终坐标平差值GPS 成果表坐标系为西安80坐标系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西南林业大学
《全球卫星定位系统原理》GPS控制网平差实习
(2012级)
西南林业大学土木工程学院测绘工程系
2015年07月 12 日
目录
1 实习目的 (1)
2 实习任务 (1)
3 数据处理依据 (1)
4 精度要求 (1)
5 已有成果数据 (1)
6 数据处理过程 (2)
6.1创建作业及数据导入 (2)
6.2基线预处理 (2)
6.2.1静态基线处理设置 (2)
6.2.2处理基线 (3)
6.2.3搜索闭合环 (3)
6.3设置坐标系 (3)
6.4网平差 (3)
6.5高程内外符合精度检验 (4)
6.5.1内符合精度 (4)
6.5.2外符合精度 (4)
7 数据处理成果 (4)
7.1二维平面坐标平差 (4)
7.1.1 平差参数 (4)
7.1.2 平面坐标 (5)
7.2高程拟合 (8)
7.2.1 平差参数 (8)
7.2.2 外符合精度 (8)
7.2.3内符合精度 (9)
8 质量简评 (12)
9 总结 (12)
静态GPS网平差总结报告
1 实习目的
通过对静态GPS控制网的数据处理,从实践中加深对理论知识的理解。
通过本次实习还可以熟悉GPS数据处理软件,现在的数据处理基本用软件处理,使用软件也是必备的一个技能。
2 实习任务
本次实习的任务:
(1)静态GPS外业数据基线预处理,预处理基线的方差比应尽量调整在99.9,处理后搜索闭合环要基本合格。
(2)选择/建立坐标系,建立昆明87坐标系。
(3)输入已知点并进行网平差,检测内外符合精度。
(4)撰写数据处理总结报告。
3 数据处理依据
依据《卫星定位城市测量技术规范CJJ/T 73—2010》备案号J990—2010
4 精度要求
二维平差中误差1cm
高程拟合中误差2cm
高程内符合中误差3cm
高程外符合中误差5cm
5 已有成果数据
(1)静态GPS外业数据成果(RINEX)
(2)已知点的三维坐标,坐标成果见下表
表1 已知控制点坐标
6 数据处理过程
数据处理使用中海达HDS2003数据处理软件包
6.1创建作业及数据导入
新建项目包括项目基本信息和项目属性。
项目属性中要设置技术规范等限制要求,便于数据处理参照。
6.2基线预处理
6.2.1静态基线处理设置
静态基线设置包括两个内容,一个是数据采样间隔,一个是高度截止角。
基线设置可以应用于全部基线,也可以用于选定基线。
在数据导入后,先设置一组数值应用于全部基线,待解算完成后再进行单条基线的处理。
6.2.2处理基线
对所有基线处理后,基线列表里的解类型要为整数解,对不是整数解的基线要进行二次修改基线处理设置,对数据质量不高的基线,还可以在属性区里的数据观测图中进行修改,原则上方差比越接近99.9越好,所以修改单条基线时要把方差比朝着99.9去调整。
本次实习方差比没有调整到99.9的基线有48条。
6.2.3搜索闭合环
调整好基线就要搜索闭合环了,一般情况下都会出现不合格的基线,本次实习第一次搜索出了不合格闭合环54条,去除不合格不合环的方法有两种,一是找到组成环的基线,对基线再次进行修改,二是禁用基线。
这里采用禁用基线的方法,基线总共禁用了50条,最后不合格闭合环有2条,分别是:同步环[ ] (795) :∑X(当前限制0.0049m)∑X=-0.0077
同步环[ ] (1290) :∑Y(当前限制0.0074m)∑X=0.0101
6.3设置坐标系
在坐标系统里新建坐标系(昆明87坐标),坐标设置参数见下:
坐标系名称:中国-昆明87坐标
80椭球长半轴a:6378245.000000
椭球扁率f:1/298.300000
投影名称:高斯投影
尺度:1.000000 投影高:1850.000000
X加常数:0.000000 Y加常数:500000.000000
平均纬度:025:00:00.000000N
中央子午线:102:33:00.000000E
6.4网平差
(1)平差参数设置
平差设置:三维平差、二维平差、高程拟合
自由平差:协方差比例系数1
二维平差:平移、旋转、缩放
高程拟合:曲面拟合
(2)输入已知点
把全部已知点输入。
在管理区选择站点列表,在属性区选修改,在属性区内输入已知点坐标。
(3)进行网平差。
网平差结束后到处平差报告,将格式存为word文档。
6.5高程内外符合精度检验
6.5.1内符合精度
在已知的11个点中,选择均匀分布在测区周围的6个点作为已知点,其余5个假定为未知点,用这6个点解算出其余5个点的拟合高程,用解算出的高程与已知高程进行求差,得到一组dH。
利用dH计算模型内符合中误差,模型内符合中误差m H应按下式计算:
m H=[]
1
-
n
dHdH
式中:m H—高程异常模型内符合中误差(cm);
dH—拟合点水准高程与模型计算高程的差值(cm);
n—参与拟合的点数。
6.5.2外符合精度
外符合精度检测的是检测点水准高程与GNSS测量高程之间的误差,这里在第一步的平差报告里就有成果了。
外符合高程中误差M H应按下式计算:
M H=[]
N dHdH
式中:M H—外符合高程中误差(cm);
dH—检测点水准高程与GNSS测量高程的差值(cm);
N—检测点数。
7 数据处理成果
7.1二维平面坐标平差
7.1.1 平差参数
迭代次数:3
网的参考因子:9.8428
x向平移:-2199547.7247米y向平移:370460.5442米比例:-67.3661ppm 旋转:-459.8233秒
7.1.2 平面坐标
表2 二维平差数据
续表
表3 最弱点平面中误差
7.2高程拟合
7.2.1 平差参数
迭代次数:2
网的参考因子:7.3736
参考点:-TSB
H = H0 + A + B * x + C * y + D * x * x + E * x * y + F * y * y A = -951.672, B = 8.92E-006, C = 8.73E-005
D = 1.3272E-009,
E = -5.42171E-010,
F = 9.25803E-010
7.2.2 外符合精度
表4 拟合高程
续表
7.2.3内符合精度
表5 内符合精度检核成果表(见下页)
8 质量简评
(1)二维平差中误差限差1cm,结果数据均在限差内,符合精度要求。
(2)高程拟合中误差限差2cm,结果数据均在限差内,符合精度要求。
(3)高程模型内符合精度中误差限差3cm,测试五组,其中四组误差均小于1cm,一组误差在2cm以内,符合精度要求。
(4)高程模型外符合精度中误差限差5cm,结果数据均在限差内,符合精度要求。
9 总结
通过本次实习,基本掌握了静态GPS数据处理的流程,对中海达HDS2003软件使用有了更进一步的了解,对GPS的兴趣又增加不少。
在实习中学到了不少处理数据的经验,不足在于对GPS数据处理的其他处理还没有学习到,这在以后的学习中属于需要加强的内容。
最后,感谢朱老师的悉心教导!。