922259-人工智能导论第4版试验参考程序-补充:模糊推理系统
922262-人工智能导论第4版试验参考程序-迷宫寻路实验要求
实验四 A*算法实验II
一、实验目的:
熟悉和掌握A*算法实现迷宫寻路功能,要求掌握启发式函数的编写以及各类启发式函数效果的比较。
二、实验原理:
A*(A-Star)算法是一种静态路网中求解最短路最有效的方法。
公式表示为:f(n)=g(n)+h(n),其中f(n)是节点n从初始点到目标点的估价函数,g(n)是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n)小于等于n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低,但能得到最优解。
如果估价值大于实际值,搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
三、实验内容:
1、参考实验系统给出的迷宫求解核心代码,观察求解过程与思路。
2、画出用A*算法求解迷宫最短路径的流程图。
3、尝试改变启发式算法提高迷宫搜索速度。
4、分析不同启发式函数对迷宫寻路速度的提升效果。
四、实验报告要求:
1、画出A*算法求解迷宫最短路径问题的流程图。
2、试分析不同启发式函数对迷宫寻路求解的速度提升效果。
3、分析启发式函数中g(n)和h(n)求解方法不同对A*算法的影响。
人工智能第四章模糊计算和模糊推理1
人工智能第四章模糊计算和模糊推理1人工智能第四章模糊计算和模糊推理1
模糊计算和模糊推理是人工智能领域中一个新兴的分支,它主要应用
于处理难以定义的不确定系统的计算问题。
模糊计算和模糊推理有助于分
析复杂的非线性系统,建立系统模型,解决不同学科的问题。
模糊推理是利用模糊计算得出的结果作为基础,通过运用模糊逻辑判
断进行决策,从而解决不同学科问题的一种方法。
模糊推理的核心思想是
使用模糊计算将输入信息映射到输出信息,从而形成一个统一的、有序的、易于理解的推理系统。
模糊推理可以用来评估不确实性系统中不同属性的
相关性、可能性以及其他因素,并给出多个可能的输出选择,有效地改善
决策结果的准确性。
模糊计算和模糊推理都可以有效地处理信息中的不确定性,模糊计算
的输入可以是多种格式。
922263-人工智能导论第4版试验参考程序-说明
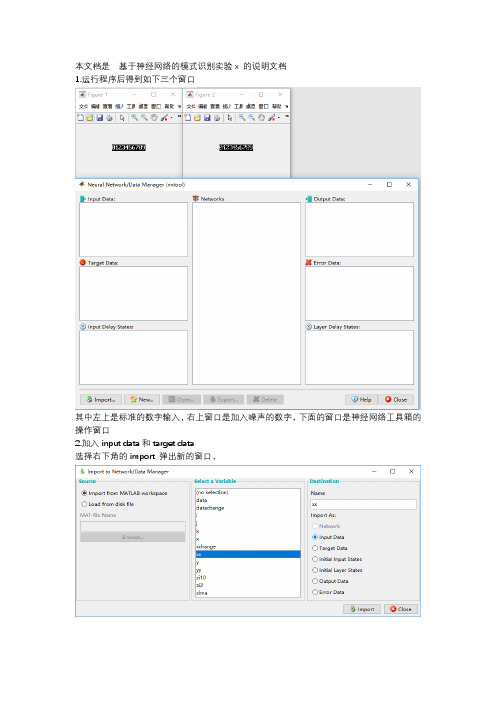
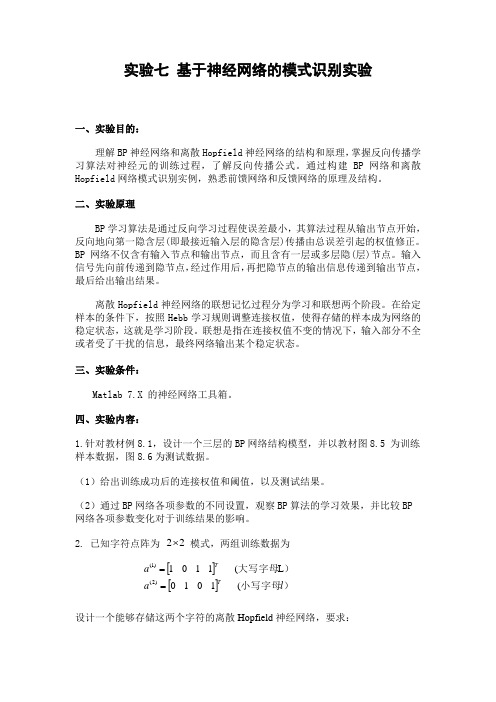
本文档是基于神经网络的模式识别实验x 的说明文档
1.运行程序后得到如下三个窗口
其中左上是标准的数字输入,右上窗口是加入噪声的数字,下面的窗口是神经网络工具箱的操作窗口
2.加入input data和target data
选择右下角的import 弹出新的窗口,
选择xx作为input data,yy作为target data。
得到的图片如图所示:
3.创建神经网络
点击下面的new按钮
选好图中的input data 和target data 下拉框,点击create
4.训练网络
双击中间的network1 弹出训练框
点击train按钮
选好inputs 和targets 复选框,点击下面的train network 弹出训练的过程框
5.训练结果,单机下面的pots可以查看训练的结果v。
922257-人工智能导论第4版试验参考程序-8基于神经网络的优化计算实验要求
实验六基于神经网络的优化计算实验
一、实验目的:
掌握连续Hopfield神经网络的结构和运行机制,理解连续Hopfield神经网络用于优化计算的基本原理,掌握连续Hopfield神经网络用于优化计算的一般步骤。
二、实验原理
连续Hopfield神经网络的能量函数的极小化过程表示了该神经网络从初始状态到稳定状态的一个演化过程。
如果将约束优化问题的目标函数与连续Hopfield神经网络的能量函数对应起来,并把约束优化问题的解映射到连续Hopfield神经网络的一个稳定状态,那么当连续Hopfield神经网络的能量函数经演化达到最小值时,此时的连续Hopfield神经网络的稳定状态就对应于约束优化问题的最优解。
三、实验条件:
VC++6.0。
四、实验内容:
1、参考求解TSP问题的连续Hopfield神经网络源代码,给出15个城市和20个城市的求解结果(包括最短路径和最佳路线),分析连续Hopfield神经网络求解不同规模TSP问题的算法性能。
2、对于同一个TSP问题(例如15个城市的TSP问题),设置不同的网络参数,分析不同参数对算法结果的影响。
3、上交源代码。
五、实验报告要求:
1、画出连续Hopfield神经网络求解TSP问题的流程图。
2、根据实验内容,给出相应结果及分析。
3、总结连续Hopfield神经网络和遗传算法用于TSP问题求解时的优缺点。
922252-人工智能导论第4版试验参考程序-2模糊推理系统实验要求
实验二 模糊推理系统实验一、实验目的:理解模糊逻辑推理的原理及特点,熟练应用模糊推理,了解可能性理论。
二、实验原理模糊推理所处理的事物自身是模糊的,概念本身没有明确的外延,一个对象是否符合这个概念难以明确地确定模糊推理是对这种不确定性,即模糊性的表示与处理。
模糊逻辑推理是基于模糊性知识(模糊规则)的一种近似推理,一般采用Zadeh 提出的语言变量、语言值、模糊集和模糊关系合成的方法进行推理。
三、实验条件:Matlab 7.0 的Fuzzy Logic Tool 。
四、实验内容:1.设计洗衣机洗涤时间的模糊控制。
已知人的操作经验为:“污泥越多,油脂越多,洗涤时间越长”;“污泥适中,油脂适中,洗涤时间适中”;“污泥越少,油脂越少,洗涤时间越短”。
要求:(1)设计相应的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表和推论结果立体图。
(2)假定当前传感器测得的信息为00(60,70x y ==污泥)(油脂),采用面积重心法反模糊化,给出模糊推理结果,并观察模糊控制的动态仿真环境,给出模糊控制器的动态仿真环境图。
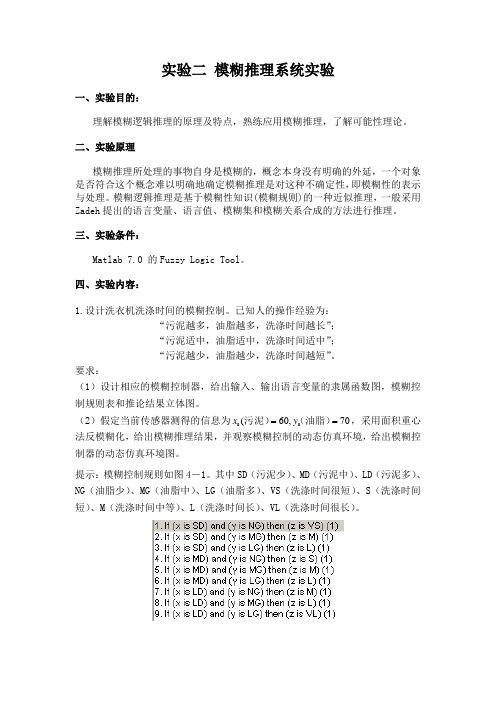
提示:模糊控制规则如图4-1。
其中SD (污泥少)、MD (污泥中)、LD (污泥多)、NG (油脂少)、MG (油脂中)、LG (油脂多)、VS (洗涤时间很短)、S (洗涤时间短)、M (洗涤时间中等)、L (洗涤时间长)、VL (洗涤时间很长)。
2.假设两汽车均为理想状态,即2Y()4U()20.724s s s s =+⨯⨯+,Y 为速度,U 为油门控制输入。
(1)设计模糊控制器控制汽车由静止启动,追赶200m 外时速90km 的汽车并与其保持30m 的距离。
(2)在25时刻前车速度改为时速110km 时,仍与其保持30m 距离。
(3)在35时刻前车速度改为时速70km 时,仍与其保持30m 距离。
要求:(1)设计两输入一输出的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表,推论结果立体图。
人工智能领域模糊逻辑和模糊系统方面88个课题名称
人工智能领域模糊逻辑和模糊系统方面88个课题名称以下是人工智能领域模糊逻辑和模糊系统方面的88个课题名称:1.模糊逻辑与人工智能的应用研究2.模糊逻辑在机器学习中的应用3.模糊推理与知识表达4.模糊控制系统的设计与优化5.模糊规则库的自动构建算法6.模糊神经网络的设计与训练7.模糊集合理论与人工智能的集成8.模糊集合在聚类分析中的应用9.模糊推理在决策支持系统中的应用10.模糊系统在智能交通系统中的应用11.模糊逻辑在自然语言处理中的应用12.模糊逻辑在机器视觉中的应用13.模糊逻辑在智能机器人中的应用14.模糊逻辑在医疗诊断中的应用15.模糊逻辑在金融风险评估中的应用16.模糊决策树的构建和优化17.模糊集合在数据挖掘中的应用18.模糊规划与模糊优化算法研究19.模糊逻辑在智能交互系统中的应用20.模糊集合在模式识别中的应用21.模糊神经网络模型的改进与优化22.模糊逻辑在智能音频处理中的应用23.模糊系统在能源管理中的应用24.模糊决策支持系统的设计与实现25.模糊逻辑在人机交互中的应用26.模糊决策在供应链管理中的应用27.模糊集合在智能传感器网络中的应用28.模糊神经网络在图像处理中的应用29.模糊逻辑在机器人导航中的应用30.模糊集成系统的建模与仿真31.模糊逻辑在风险评估中的应用32.模糊控制在工业自动化中的应用33.模糊决策在项目管理中的应用34.模糊逻辑在自动驾驶中的应用35.模糊规划在城市规划中的应用36.模糊系统在嵌入式系统中的应用37.模糊逻辑在智能家居中的应用38.模糊决策在医疗资源分配中的应用39.模糊集合在物联网中的应用40.模糊神经网络在语音识别中的应用41.模糊逻辑在电网管理中的应用42.模糊控制在飞行器导航中的应用43.模糊规划与模糊匹配的研究44.模糊逻辑在航空管制中的应用45.模糊决策支持系统在供应链管理中的应用46.模糊集合在智能视频监控中的应用47.模糊逻辑在电力系统中的应用48.模糊推理在网站推荐系统中的应用49.模糊控制在水资源管理中的应用50.模糊规划与时间序列分析的研究51.模糊逻辑在虚拟现实中的应用52.模糊决策在物流运输中的应用53.模糊集合在智能安防中的应用54.模糊神经网络在手写字符识别中的应用55.模糊逻辑在风电场管理中的应用56.模糊控制在石油化工过程中的应用57.模糊规划与智能匹配算法的研究58.模糊逻辑在智能仓储中的应用59.模糊决策支持系统在供应链协同中的应用60.模糊集合在智能交通信号控制中的应用61.模糊逻辑在飞机故障诊断中的应用62.模糊决策在电子商务中的应用63.模糊神经网络在航空器设计中的应用64.模糊逻辑在火电厂运行管理中的应用65.模糊控制在化工过程优化中的应用66.模糊规划与智能匹配在人力资源管理中的应用67.模糊逻辑在物联网安全中的应用68.模糊决策支持系统在供应链危机管理中的应用69.模糊集合在智能交通路线规划中的应用70.模糊逻辑在医疗器械设计中的应用71.模糊决策在电子支付中的应用72.模糊神经网络在智能电网中的应用73.模糊逻辑在钢铁冶炼过程中的应用74.模糊控制在交通拥堵优化中的应用75.模糊规划与智能匹配在企业战略决策中的应用76.模糊逻辑在自动化仓库中的应用77.模糊决策支持系统在供应链可持续发展中的应用78.模糊集合在智能交通违章识别中的应用79.模糊逻辑在汽车动力系统设计中的应用80.模糊决策在电子游戏中的应用81.模糊神经网络在智能能源领域中的应用82.模糊逻辑在能源消耗优化中的应用83.模糊控制在机器故障预测中的应用84.模糊规划与智能匹配在企业价值评估中的应用85.模糊逻辑在火车运行控制中的应用86.模糊决策支持系统在供应链风险管理中的应用87.模糊集合在智能交通车辆跟踪中的应用88.模糊逻辑在飞行器设计优化中的应用。
北京师范大学人工智能导论课后作业

北京师范大学人工智能导论课后作业
《人工智能导论(第4版)》是由王万良编著,高等教育出版社于年出版的“十二五”普通高等教育本科国家级规划教材。
该教材可作为电气信息类、机械类、电子信息科学类
以及其他专业的本科生学习人工智能课程的教材。
人工智能导论由绪论、知识表示、确定性推理方法、不确定性推理方法、搜索求解策略、智能计算及其应用、专家系统与机器学习、人工神经网络及其应用、智能体与多智能
体系统、自然语言处理及其应用、人工智能在游戏设计中的应用组成。
922256-人工智能导论第4版试验参考程序-7基于神经网络的模式识别实验要求
实验七 基于神经网络的模式识别实验一、实验目的:理解BP 神经网络和离散Hopfield 神经网络的结构和原理,掌握反向传播学习算法对神经元的训练过程,了解反向传播公式。
通过构建BP 网络和离散Hopfield 网络模式识别实例,熟悉前馈网络和反馈网络的原理及结构。
二、实验原理BP 学习算法是通过反向学习过程使误差最小,其算法过程从输出节点开始,反向地向第一隐含层(即最接近输入层的隐含层)传播由总误差引起的权值修正。
BP 网络不仅含有输入节点和输出节点,而且含有一层或多层隐(层)节点。
输入信号先向前传递到隐节点,经过作用后,再把隐节点的输出信息传递到输出节点,最后给出输出结果。
离散Hopfield 神经网络的联想记忆过程分为学习和联想两个阶段。
在给定样本的条件下,按照Hebb 学习规则调整连接权值,使得存储的样本成为网络的稳定状态,这就是学习阶段。
联想是指在连接权值不变的情况下,输入部分不全或者受了干扰的信息,最终网络输出某个稳定状态。
三、实验条件:Matlab 7.X 的神经网络工具箱。
四、实验内容:1.针对教材例8.1,设计一个三层的BP 网络结构模型,并以教材图8.5 为训练样本数据,图8.6为测试数据。
(1)给出训练成功后的连接权值和阈值,以及测试结果。
(2)通过BP 网络各项参数的不同设置,观察BP 算法的学习效果,并比较BP 网络各项参数变化对于训练结果的影响。
2. 已知字符点阵为模式,两组训练数据为 设计一个能够存储这两个字符的离散Hopfield 神经网络,要求:22⨯[][])小写字母)大写字母l a a TT (1010L (1101)2()1(==(1)给出相应的离散Hopfield 神经网络结构图;(2)计算连接权值及阈值(阈值可设为 0);(3)输入下列测试数据给出网络最终输出的稳定状态。
五、实验报告要求:1. 按照实验内容,给出相应结果。
2.分析比较BP 网络各项参数变化对于训练结果的影响。
人工智能导论 第4章 不确定性推理方法(导论) 1-41

CF1(H ) =CF(H , E1)× max{0,CF(E1)} CF2(H ) =CF (H , E2 )× max{0,CF (E2 )}
19
4.2 可信度方法
5. 结论不确定性的合成算法
(2)求出E1与E2对H的综合影响所形成的可信度 CF1,2(H ):
教材:
王万良《人工智能导论》(第4版) 高等教育出版社,2017. 7
第4章 不确定性推理方法
现实世界中由于客观上存在的随机性、模糊性,反 映到知识以及由观察所得到的证据上来,就分别 形 成了不确定性的知识及不确定性的证据。因而 还必 须对不确定性知识的表示及推理进行研究。 这就是 本章将要讨论的不确定性推理。
3
第4章 不确定性推理方法
✓4.1 不确定性推理中的基本问题
4.2 可信度方法 4.3 证据理论 4.4 模糊推理方法
4
4.1 不确定性推理中的基本问题
推理:从已知事实(证据)出发,通过运用相 关 知识逐步推出结论或者证明某个假设成立或 不成 立的思维过程。
不确定性推理:从不确定性的初始证据出发, 通 过运用不确定性的知识,最终推出具有一定 程度 的不确定性但却是合理或者近乎合理的结 论的思 维过程。
r1 : CF1(H ) 0.8 max{0,CF(E1 )}
0.8 max{0,0.35} 0.28
23
4.2 可信度方法
解: 第一步:对每一条规则求出CF(H)。
r2 : CF2 (H ) 0.6 max{0,CF(E2 )}
0.6 max{0,0.8} 0.48
r3 : CF3(H ) 0.5 max{0,CF(E3 )}
4. 不确定性的传递算法
人工智能4不确定性推理

模糊集上的运算主要有:包含、交、并、补等等。
1. 包含运算
定义4.5 设A,B∈F(U),若对任意u∈U,都有
μB(u)≤μA(u) 成立,则称A包含B,记为B A。 2. 交、并、补运算
定义4.6 设A,B∈F(U),以下为扎德算子
A
B : A
B (u)
max{ uU
A
(u
),
B
(u)}
A (u) B (u)
3
模糊集的表示方法(1)
若论域离散且有限,则模糊集A可表示为:
也可写为:
A={μA(u1),μA(u2),…,μA(un)}
或者:
A=μA(u1)/u1+μA(u2)/u2+…+μA(un)/un
n
n
A (u ) / u , 或者A (u ) / u
Ai
i
Ai
i
i 1
i 1
A={μA(u1)/u1,μA(u2)/u2,…,μA(un)/un} A={(μA(u1),u1),(μA(u2),u2),…,(μA(un),un)} 隶属度为0的元素可以不写。
(A, B) 1 [1 (1 0.2)] 0.9 2
即A和B两个模糊集之间的匹配度为0.9。
21
语义距离
如果论域U上两个模糊集A和B的语义距离为d(A,B),则其匹配度为 1-d(A,B)。
曼哈顿距离(Manhattan Distance)或者海明距离(Hamming
Distance)
d (A, B)
A
•
B
{
U
A
(ui
)
B
(ui
)}
A⊙
B
{
922255-人工智能导论第4版试验参考程序-6遗传算法求解TSP问题实验要求
实验六遗传算法实验II一、实验目的:熟悉和掌握遗传算法的原理、流程和编码策略,并利用遗传求解函数优化问题,理解求解TSP问题的流程并测试主要参数对结果的影响。
二、实验原理:旅行商问题,即TSP问题(Traveling Salesman Problem)是数学领域中著名问题之一。
假设有一个旅行商人要拜访n个城市,他必须选择所要走的路径,路经的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。
路径的选择目标是要求得的路径路程为所有路径之中的最小值。
TSP问题是一个组合优化问题。
该问题可以被证明具有NPC计算复杂性。
因此,任何能使该问题的求解得以简化的方法,都将受到高度的评价和关注。
遗传算法的基本思想正是基于模仿生物界遗传学的遗传过程。
它把问题的参数用基因代表,把问题的解用染色体代表(在计算机里用二进制码表示),从而得到一个由具有不同染色体的个体组成的群体。
这个群体在问题特定的环境里生存竞争,适者有最好的机会生存和产生后代。
后代随机化地继承了父代的最好特征,并也在生存环境的控制支配下继续这一过程。
群体的染色体都将逐渐适应环境,不断进化,最后收敛到一族最适应环境的类似个体,即得到问题最优的解。
要求利用遗传算法求解TSP问题的最短路径。
三、实验内容:1、参考实验系统给出的遗传算法核心代码,用遗传算法求解TSP的优化问题,分析遗传算法求解不同规模TSP问题的算法性能。
2、对于同一个TSP问题,分析种群规模、交叉概率和变异概率对算法结果的影响。
3、增加1种变异策略和1种个体选择概率分配策略,比较求解同一TSP问题时不同变异策略及不同个体选择分配策略对算法结果的影响。
4、上交源代码。
四、实验报告要求:1、画出遗传算法求解TSP问题的流程图。
2、分析遗传算法求解不同规模的TSP问题的算法性能。
3、对于同一个TSP问题,分析种群规模、交叉概率和变异概率对算法结果的影响。
4、增加1种变异策略和1种个体选择概率分配策略,比较求解同一TSP问题时不同变异策略及不同个体选择分配策略对算法结果的影响。
920092-人工智能导论(第4版)-第1章 绪论(导论)

1.2.3 发展(1970年- )
20世纪60年代末,人工智能研究遇到困难,如机器翻译。 1966年美国顾问委员会的报告裁定:还不存在通用的科学文 本机器翻译,也没有很近的实现前景。英国、美国中断了大 部分机器翻译项目的资助。
1977年,费根鲍姆在第五届国际人工智能联合会议上提出了 “知识工程”概念,推动了知识为中心的研究。
5
1.1.1 智能的概念
▪ 自然界四大奥秘:物质的本质、宇宙的起源、生命的本 质、智能的发生。
▪ 对智能还没有确切的定义,主要流派有: (1)思维理论:智能的核心是思维 (2)知识阈值理论:智能取决于知识的数量及一般化程度 (3)进化理论:用控制取代知识的表示 ▪ 智能是知识与智力的总和
知识是一切智能行为的基础
30
1.4 人工智能的主要研究领域
9. 自动程序设计
程序综合:用户只需要告诉计算机要“做什么”, 无须说明“怎么做”,计算机就可自动实现程序的设计。 程序正确性的验证:研究出一套理论和方法,通过运 用这套理论和方法就可以证明程序的正确性。 2014年2月新闻:麻省理工教授 Armando Solar-Lezama 开发的一种智能化编程语言“Sketch”,可以自动填补、 修正代码内容,在几毫秒内修复代码,让程序员可以忽 略许多繁琐的细节。
不定期的突发性。 非线性的独创性及模糊性。 穿插于形象思维与逻辑思维之中。
3. 学习能力
学习既可能是自觉的、有意识的,也可能是不自觉的、无意识 的;既可以是有教师指导的,也可以是通过自己实践的。
4. 行为能力(表达能力)
人们的感知能力:用于信息的输入。
行为能力:信息的输出。
9
1.1.3 人工智能
人工智能:用人工的方法在机器(计算机)上实现的智能; 或者说是人们使机器具有类似于人的智能。
人工智能导论课后答案第四版
人工智能导论课后答案第四版1、在机器学习中,机器可以自行通过样本总结规律,不需要人工干预,就可以总结规律的方向以及参数的维度。
[判断题] *对错(正确答案)2、知识图谱已经成为推动人工智能发展的唯一核心驱动力。
[判断题] *对错(正确答案)3.快递无人车配送主要是根据雷达控制、GPS定位、图像识别、路径规划、道路监控来实现快递车的运行及环境感知。
[判断题] *对(正确答案)错4. 无人机航拍主要利用遥感操控平台。
[判断题] *对(正确答案)错5.惯性导航系统测量运动载体的线加速度和角速率数据,再对这些数据对距离进行微分运算。
[判断题] *对错(正确答案)6. 全局路径规划的主要规划内容是避免碰撞和保持安全距离。
[判断题] *对错(正确答案)7.2010年美国颁布了以IEEE802.11P作为底层通信协议和以IEEE1609系列规范作为高层通信协议的V2X网联通通信标准。
[判断题] *对(正确答案)错8. 无人车自主避障的第一阶段是规划合理路线。
[判断题] *对错(正确答案)9.三维自动目标识别(ATR)是指从三维成像的传感器数据中自动检测并识别目标。
[判断题] *对(正确答案)错10. 无人船分为自主无人船、非自主无人船两种。
[判断题] *对错(正确答案)1、现阶段的机器感知是计算机通过()来辨别周围世界。
*A. 图像(正确答案)B. 声音(正确答案)C. 感觉D. 信息2、图像识别经历的阶段有() [单选题] *A. 文字识别B. 数字图像处理C. 识别、物体识别D. 以上都是(正确答案)3、机器学习包括() *A. 监督学习(正确答案)B. 无监督学习(正确答案)C. 半监督学习(正确答案)D. 强化学习(正确答案)4、模式识别的主要目标就是() [单选题] *用计算机来模拟人的各种识别能力(正确答案)用语言来模拟人的各种识别能力用机器来模拟人的各种识别能力用感觉来模拟人的各种识别能力5、图像识别是指利用计算机对图像进行() [单选题] *分析、解决、感受处理、分析、理解(正确答案)认知、感受、分析6、( )是以数字图像处理与识别为基础并结合人工智能、系统学等学科的研究,其研究成果被广泛应用在各种工业及探测机器人上。
人工智能4推理技术
4.1 消解原理
4.1.1 子句集的求取
(7)消去全称量词 [~P(x) ∨~P(y) ∨ P(f(x,y))]∧[~P(x) ∨ Q(x,g(x)) ]∧[~P(x) ∨ ~ P(g(x))] (8)消去连词符号∧ ~P(x) ∨~P(y) ∨ P(f(x,y)), ~P(x) ∨ Q(x,g(x)), ~P(x) ∨ ~ P(g(x)) (9)更换变量名称 ~P(x1) ∨~P(y) ∨ P(f(x1,y)), ~P(x2) ∨ Q(x2,g(x2)), ~P(x3) ∨ ~ P(g(x3))
4.1 消解原理
4.1.2 消解推理规则
令L1为任一原子公式,L2为另一原子公式;L1和L2具有相同 的谓词符号,但一般具有不同的变量。已知两子句L1∨α和~ L2∨β,如果L1和L2具有最一般合一者σ,那么通过消解可以从这 两个父辈子句推导出一个新子句(α∨β)σ。这个新子句叫做消解 式。它是由取这两个子句的析取,然后消去互补对而得到的。
4.0 推理的基本概念
4.0.4 冲突消解策略
消解冲突的基本思想:对知识进行排序: (1)按针对性排序:优先选择针对性强的知识(规则), 即要求条件多的规则。 (2)按已知事实的新鲜性排序:后生成的事实具有较大的 新鲜性。 (3)按匹配度排序:在不确定推理中,需要计算已知事实 与知识的匹配度。 (4)按条件个数排序:优先应用条件少的产生式规则。
4.1 消解原理
4.1.1 子句集的求取
步骤 (1) 消去蕴涵符号 只应用∨和~符号,以~A∨B替换A=>B。
=〉 =〉 =〉 =〉 =〉
[(A=>B) =>B] ∨C [~(A=>B) ∨B] ∨C [~(~A∨B) ∨B] ∨C [ (A ∧ ~ B) ∨B] ∨C [(A ∨B) ∧( ~ B ∨B)] ∨C [(A ∨B)] ∨C
922253-人工智能导论第4版试验参考程序-3A星算法实验要求

实验三A*算法实验I
一、实验目的:
熟悉和掌握启发式搜索的定义、估价函数和算法过程,并利用A*算法求解N数码难题,理解求解流程和搜索顺序。
二、实验原理:
A*算法是一种启发式图搜索算法,其特点在于对估价函数的定义上。
对于一般的启发式图搜索,总是选择估价函数f值最小的节点作为扩展节点。
因此,f是根据需要找到一条最小代价路径的观点来估算节点的,所以,可考虑每个节点n的估价函数值为两个分量:从起始节点到节点n的实际代价以及从节点n 到达目标节点的估价代价。
三、实验内容:
1参考A*算法核心代码,以8数码问题为例实现A*算法的求解程序(编程语言不限),要求设计两种不同的估价函数。
2在求解8数码问题的A*算法程序中,设置相同的初始状态和目标状态,针对不同的估价函数,求得问题的解,并比较它们对搜索算法性能的影响,包括扩展节点数、生成节点数等。
3 对于8数码问题,设置与上述2相同的初始状态和目标状态,用宽度优先搜索算法(即令估计代价h(n)=0的A*算法)求得问题的解,以及搜索过程中的扩展节点数、生成节点数。
4上交源程序。
四、实验报告要求:
1A*算法求解框图。
2在求解8数码问题的A*算法程序中,设置相同的初始状态和目标状态,针对不同的估价函数,求得问题的解,并比较它们对搜索算法性能的影响,包括扩展节点数、生成节点数等。
3根据宽度优先搜索算法和A*算法,分析启发式搜索的特点。
920090-人工智能导论(第4版)-第3章 确定性推理方法(导论)

3.1.1 推理的定义
已知事实
推理: ( 证 据 ) 某 种 策 略
知识
结论
数据库 知识库
专家
推理机
病人
医疗专家系统
知识 专家的经验、医学常识
初始 证据
病人的症状、化验结果
证据
中间结论
7
3.1 推理的基本概念
3.1.1 推理的定义 3.1.2 推理方式及其分类 3.1.3 推理的方向 3.1.4 冲突消解策略
2
第3章 确确定定性性推推理理方方法法
知识 知识 推理
智 能 ?!
自然演绎 推理
经典逻辑推理 (确定性推理)
推
理
不确定性推理
归结演绎 推理
与 /或 形 演绎推理
3
第3章 确定性推理方法
3.1 推理的基本概念 3.2 自然演绎推理 3.3 谓词公式化为子句集的方法 3.4 鲁宾逊归结原理 3.5 归结反演 3.6 应用归结反演求解问题
22
3.1.3 推理的方向
3. 混合推理
正向推理: 盲目、效率低。 ▪ 逆向推理: 若提出的假设目标不符合实际,会降低效率。 ▪ 正反向混合推理: (1)先正向后逆向:先进行正向推理,帮助选择某个目标,
即从已知事实演绎出部分结果,然后再用逆向推理证实该目标 或提高其可信度;
(2)先逆向后正向:先假设一个目标进行逆向推理,然后再
36
第3章 确定性推理方法
3.1 推理的基本概念 3.2 自然演绎推理 3.3 谓词公式化为子句集的方法 3.4 鲁宾逊归结原理 3.5 归结反演 3.6 应用归结反演求解问题
归 结 演 绎 推 理
37
归结演绎推理
反证法: P Q ,当且仅当 P Q F , 即 Q为 P 的逻辑结论,当且仅当 P Q 是不可
人工智能 4.5 模糊推理

按这种方法,对δmatch(A,D)与δmatch(B,D)可以得到: 0.8/1+0.5/1+0.1/1+0.5/1+0.5/1+0.1/0+0.1/1+0.1/0 +0.1/0 =0.8/1+0.1/0 由于μ1=0.8>μ0=0.1,所以得到: δmatch(A,D) ≥δmatch(B,D) 同理可得: δmatch(A,D) ≥δmatch(C,D) δmatch(B,D) ≥δmatch(C,D) 最后得到: δmatch(A,D) ≥δmatch(B,D)≥δmatch(C,D) 由此可知R1应该是首先被选用的知识。
模糊知识的表示
(1)模糊产生式规则的一般形式是: IF E THEN H (CF,λ) 其中,E是用模糊命题表示的模糊条件;H是用模糊命题表示的 模糊结论;CF是知识的可信度因子,它既可以是一个确定 的数,也可以是一个模糊数或模糊语言值。λ是匹配度的阈 值,用以指出知识被运用的条件。例如: IF x is A THEN y is B (CF,λ) (2)推理中所用的证据也用模糊命题表示,一般形式为 x is A’ 或者 x is A’ (CF) (3)模糊推理要解决的问题:证据与知识的条件是否匹配:如 果匹配,如何利用知识及证据推出结论。
(
i 1 n i 1
n
A
(ui ) A ) ( B (ui ) B )
2 n
[ ( A (ui ) A ) ] [ ( B (ui ) B ) 2 ]
i 1
1 n 1 n A A (ui ), B B (ui ) n i1 n i1
国内状况
1976年传入我国 1980年成立中国模糊数学与模糊系统学 会 1981年创办《模糊数学》杂志 1987年创办《模糊系统与数学》杂志 我国已成为全球四大模糊数学研究中心 之一(美国、西欧、日本、中国)
922252-人工智能导论第4版试验参考程序-2模糊推理系统实验要求
实验二 模糊推理系统实验一、实验目的:理解模糊逻辑推理的原理及特点,熟练应用模糊推理,了解可能性理论。
二、实验原理模糊推理所处理的事物自身是模糊的,概念本身没有明确的外延,一个对象是否符合这个概念难以明确地确定模糊推理是对这种不确定性,即模糊性的表示与处理。
模糊逻辑推理是基于模糊性知识(模糊规则)的一种近似推理,一般采用Zadeh 提出的语言变量、语言值、模糊集和模糊关系合成的方法进行推理。
三、实验条件:Matlab 7.0 的Fuzzy Logic Tool 。
四、实验内容:1.设计洗衣机洗涤时间的模糊控制。
已知人的操作经验为:“污泥越多,油脂越多,洗涤时间越长”;“污泥适中,油脂适中,洗涤时间适中”;“污泥越少,油脂越少,洗涤时间越短”。
要求:(1)设计相应的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表和推论结果立体图。
(2)假定当前传感器测得的信息为00(60,70x y ==污泥)(油脂),采用面积重心法反模糊化,给出模糊推理结果,并观察模糊控制的动态仿真环境,给出模糊控制器的动态仿真环境图。
提示:模糊控制规则如图4-1。
其中SD (污泥少)、MD (污泥中)、LD (污泥多)、NG (油脂少)、MG (油脂中)、LG (油脂多)、VS (洗涤时间很短)、S (洗涤时间短)、M (洗涤时间中等)、L (洗涤时间长)、VL (洗涤时间很长)。
2.假设两汽车均为理想状态,即2Y()4U()20.724s s s s =+⨯⨯+,Y 为速度,U 为油门控制输入。
(1)设计模糊控制器控制汽车由静止启动,追赶200m 外时速90km 的汽车并与其保持30m 的距离。
(2)在25时刻前车速度改为时速110km 时,仍与其保持30m 距离。
(3)在35时刻前车速度改为时速70km 时,仍与其保持30m 距离。
要求:(1)设计两输入一输出的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表,推论结果立体图。
920083-人工智能导论教学大纲(第4版)
《人工智能导论》课程教学大纲一、课程的性质和教学目标课程性质:人工智能是计算机科学中的重要内容,已经成为计算机技术发展以及许多高新技术产品中的核心技术。
由于人工智能是模拟人类智能解决问题,几乎在所有领域都具有非常广泛的应用。
《人工智能导论》是计算机科学与技术、软件工程、网络工程等专业本科生的一门基础选修课程。
本课程主要介绍人工智能问题求解的一般性原理和基本思想以及一些前沿内容,为学生提供最基本的人工智能技术和有关问题的入门性知识,为进一步学习和研究人工智能理论与应用奠定基础。
教学目标:1. 了解人工智能的特点、主要研究领域、研究历史及未来发展动向。
2. 掌握人工智能的基本概念、基本原理和基本方法。
3. 了解应用人工智能技术解决实际问题的范例。
该课程的目标是把握计算机科学与技术的发展趋势,熟悉本专业的前沿知识和研究热点。
该课程讲述了人工智能的发展简史、人工智能研究的基本内容和主要研究领域、人工智能的研究热点包括人工神经网络及其应用和遗传算法及其应用等。
要求学生掌握基本创新方法,能够针对创新点开展切实有效的理论和应用研究。
该课程紧密联系计算机学科中的前沿内容和所涉及的新技术,例如模糊推理方法及其在计算机控制系统中的应用、人工神经网络及其改进方法在模式识别、软测量、联想记忆、优化计算中的应用,遗传算法及其改进算法在生产调度中的应用等,学生通过该课程的学习能够了解基本的人工智能新技术和有关问题求解的创新方法;课程要求完成A*算法应用实验、遗传算法应用实验、基于神经网络的优化计算实验等自主型实验项目,学生通过实验,能够发挥主动性,研究探讨人工智能系统的运行和实现过程,提出思路并积极验证和探索自己的思路,从而更好的掌握知识,培养学生的理论联系实际能力和创新能力,逐步培养他们发现问题、提出问题、分析问题和解决问题的能力。
课程支撑的毕业要求及其指标点:该课程支撑以下毕业要求和具体细分指标点:【毕业要求3】设计/开发解决方案:能够设计针对复杂工程问题的解决方案,设计满足特定需求的系统、单元(部件)或工艺流程,并能够在设计环节中体现创新意识,考虑社会、健康、安全、法律、文化以及环境等因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模糊化 输 入 Fuzzification
inte rface
知识库 Knowledge base
数据库
规则库
Data base Rule base
推理单元 Decision -making unit
去模糊化 Defuzzification 输 出
interface
模糊推理系统
.
• 模糊化运算x fz ( x0 )
两车追赶的例子
1号 车 2号 车
90km/h
110km/h
u
模糊推理系统
70km/h
2
200m
0
+
—
50m
相对距离e
de dt
• 用SIMULINK设计两车追赶的模糊控制系统
1号车 数学模型
2号车 数学模型
极坐标
模糊推理 系统
Y(s)
Y为速度,U为油门控制输入。U(s)
s2
4 2 0.7 2s
4
110km/h
90km/h
70km/h
2
200m
0
两车追赶的例子
1号 车 2号 车
90km/h
110km/h
u
模糊推理系统
70km/h
2
200m
0
+
—
50m
相对距离e
de dt
•
e
r
e
.
r e2 e2
.
tg e
e
(1)单点模糊集合
A
(
x)
1 0
x x0 x x0
A ( x)
1
0 x0
模糊推理系统
• 模糊化运算x fz ( x0 )
(2)三角形模糊集合
A ( x)
0
x
x0
A ( x)
x0
x
0
x x0 x0 x x0
x0 x x0 x x0
1
0 x0- x0 x0+ x
模糊推理系统
• 模糊化运算x fz ( x0 )
(3)高斯形模糊集合
( x x0 )2
(x) e 22 A
A ( x)
1
0
x0
x
两车追赶的例子
1号 车 2号 车
90km/h
110km/h
u
模糊推理系统
70km/h
200m
+
—
50m
相对距离e
de dt
2 0
两车追赶的例子
假设两车均为理想状态,即