清华大学-理论力学-习题解答-2-03
清华大学版理论力学课后习题答案大全_____第3章静力学平衡问题习题解
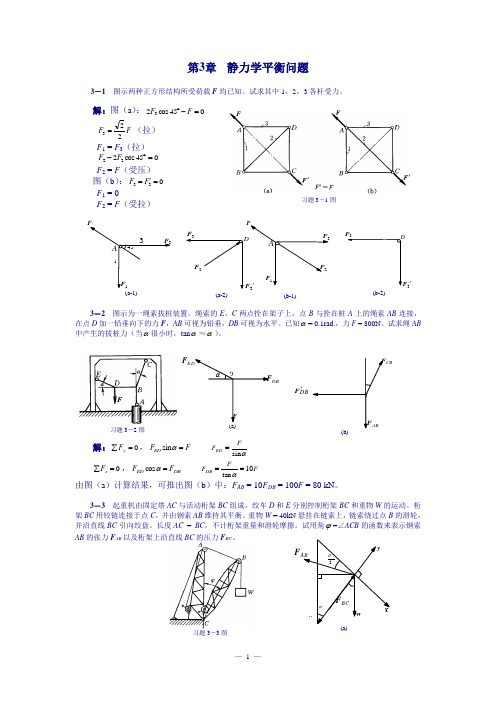
F DBCBDBF '习题3-3图第3章 静力学平衡问题3-1 图示两种正方形结构所受荷载F 均已知。
试求其中1,2,3各杆受力。
解:图(a ):045cos 23=-︒F FF F 223=(拉) F 1 = F 3(拉) 045cos 232=︒-F F F 2 = F (受压) 图(b ):033='=F F F 1 = 0F 2 = F (受拉)3-2 图示为一绳索拔桩装置。
绳索的E 、C 两点拴在架子上,点B 与拴在桩A 上的绳索AB 连接,在点D 加一铅垂向下的力F ,AB 可视为铅垂,DB 可视为水平。
已知α= 0.1rad.,力F = 800N 。
试求绳AB 中产生的拔桩力(当α很小时,tan α≈α)。
解:0=∑y F ,F F ED =αsin αs i nFF ED = 0=∑x F ,DB ED F F =αcos F FF DB 10tan ==α由图(a )计算结果,可推出图(b )中:F AB = 10F DB = 100F = 80 kN 。
3-3 起重机由固定塔AC 与活动桁架BC 组成,绞车D 和E 分别控制桁架BC 和重物W 的运动。
桁架BC 用铰链连接于点C ,并由钢索AB 维持其平衡。
重物W = 40kN 悬挂在链索上,链索绕过点B 的滑轮,并沿直线BC 引向绞盘。
长度AC = BC ,不计桁架重量和滑轮摩擦。
试用角ϕ=∠ACB 的函数来表示钢索AB 的张力F AB 以及桁架上沿直线BC 的压力F BC 。
(b-1)习题3-1图(a-1)(a-2)'3(b-2)习题3-2图F习题3-5图习题3-4图 解:图(a ):0=∑x F ,0sin 2cos=-ϕϕW F AB ,2sin2ϕW F AB =0=∑y F ,02sincos =---ϕϕAB BC F W W F即 2s i n 2c o s 2ϕϕW W W F BC ++=W W W W 2)c o s 1(c o s =-++=ϕϕ3-4 杆AB 及其两端滚子的整体重心在G 点,滚子搁置在倾斜的光滑刚性平面上,如图所示。
03 力学:第二章 运动和力-课堂练习及部分习题解答
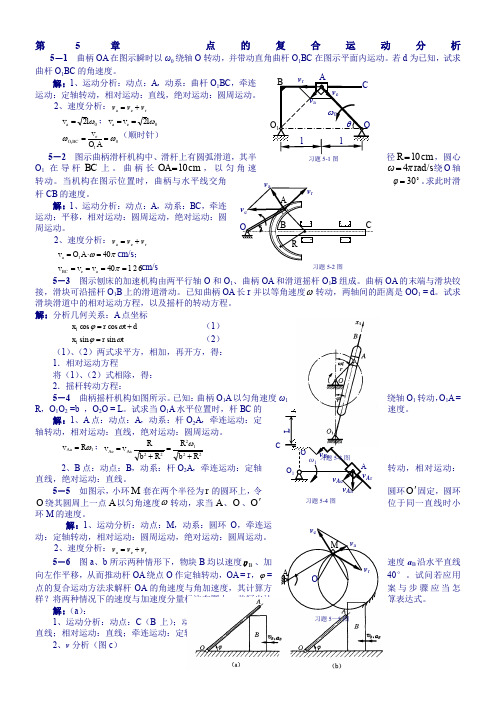
α α
N
沿斜面方向
mg+ma0
K K K 以地面为参照系,物体加速度 a = a′ + a0
建立如图所示坐标系,据加速度分量关系
( ma0 + mg ) sin α = ma′ a′ = ( a0 + g ) sin α
y K a0 x α K a′
ax = a′ cos α = ( a0 + g ) sin α cos α a y = a0 − ( a0 + g ) sin 2 α = a0 cos 2 α − g sin 2 α
(2) 小球将离开锥面时,支持力N=0,有
0 = mg sin θ − mω 2l sin θ cos θ ⇒ ωc = g l cos θ
练习册·第二章 运动和力·第3题
Zhang Shihui
题. 小球质量为m,在水中受的浮力为常力F。当它从静止 开始沉降时,受到水的粘滞阻力为 f = kv (k为常数)。证 明:小球在水中竖直沉降的速度v与时间t的关系为
2
O
θ
H r
l
r = l sin θ
竖直面内静止 T cos θ + N sin θ − mg = 0
学习指导·第二章 运动和力·习作题9
Zhang Shihui
2
⎧ ⎪ N = mg sin θ − mω l sin θ cos θ (1) 联立可得 ⎨ 2 2 T mg cos θ m ω l sin θ = + ⎪ ⎩
题. 已知一质量为m的质点在x轴上运动,质点只受到指 向原点的引力的作用,引力大小与质点离原点的距离x 的平方成反比,即f =-k/x2,k是比例常数。设质点在 x=A时的速度为零,求质点在x=A /4处的速度的大小.
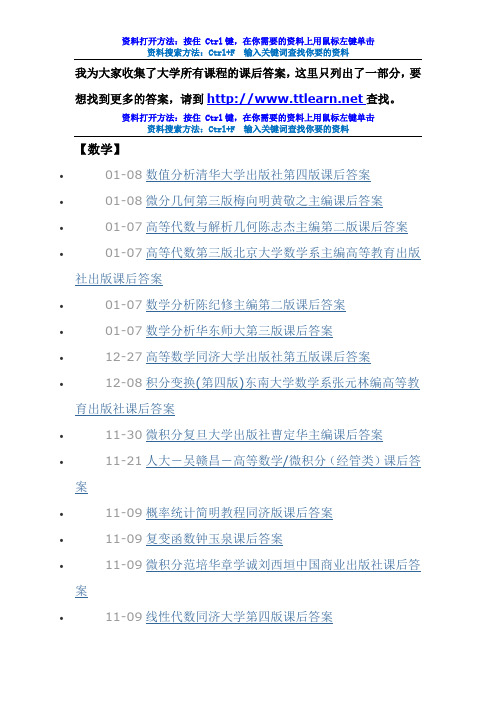
清华大学版理论力学课后习题答案大全-----第5章点的复合运动分析
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴30=φ。
求此时滑转动。
当机构在图示位置时,曲柄与水平线交角杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v += πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 将(1)、(2)式相除,得: 2.摇杆转动方程:5-4 曲柄摇杆机构如图所示。
已知:曲柄O 1A 以匀角速度ω1绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。
试求当O 1A 水平位置时,杆BC 的速度。
解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
清华大学版理论力学课后习题答案大全 第10章动能定理及其应用习题解

A(a)O(a)第10章 动能定理及其应用10-1 计算图示各系统的动能:1.质量为m ,半径为r 的均质圆盘在其自身平面内作平面运动。
在图示位置时,若已知圆盘上A 、B 两点的速度方向如图示,B 点的速度为v B ,θ = 45º(图a )。
2.图示质量为m 1的均质杆OA ,一端铰接在质量为m 2的均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动,圆心速度为v (图b )。
3.质量为m 的均质细圆环半径为R ,其上固结一个质量也为m 的质点A 。
细圆环在水平面上作纯滚动,图示瞬时角速度为ω(图c )。
解:1.222222163)2(2121)2(212121B B B C C C mv r v mr v m J mv T =⋅+=+=ω 2.222122222214321)(21212121v m v m r v r m v m v m T +=⋅++=3.22222222)2(212121ωωωωmR R m mR mR T =++=10-2 图示滑块A 重力为1W ,可在滑道内滑动,与滑块A 用铰链连接的是重力为2W 、长为l 的匀质杆AB 。
现已知道滑块沿滑道的速度为1v ,杆AB 的角速度为1ω。
当杆与铅垂线的夹角为ϕ时,试求系统的动能。
解:图(a )B A T T T +=)2121(21222211ωC C J v g W v g W ++=21221121212211122]cos 22)2[(22ωϕωω⋅⋅+⋅++++=l gW l l v l v l g W v g W]c o s 31)[(2111221222121ϕωωv l W l W v W W g +++=10-3 重力为P F 、半径为r 的齿轮II 与半径为r R 3=的固定内齿轮I 相啮合。
齿轮II 通过匀质的曲柄OC 带动而运动。
曲柄的重力为Q F ,角速度为ω,齿轮可视为匀质圆盘。
试求行星齿轮机构的动能。
大学所有课程课后答案
我为大家收集了大学所有课程的课后答案,这里只列出了一部分,要想找到更多的答案,请到查找。
资料打开方法:按住 Ctrl键,在你需要的资料上用鼠标左键单击资料搜索方法:Ctrl+F 输入关键词查找你要的资料【数学】∙01-08数值分析清华大学出版社第四版课后答案∙01-08微分几何第三版梅向明黄敬之主编课后答案∙01-07高等代数与解析几何陈志杰主编第二版课后答案∙01-07高等代数第三版北京大学数学系主编高等教育出版社出版课后答案∙01-07数学分析陈纪修主编第二版课后答案∙01-07数学分析华东师大第三版课后答案∙12-27高等数学同济大学出版社第五版课后答案∙12-08积分变换(第四版)东南大学数学系张元林编高等教育出版社课后答案∙11-30微积分复旦大学出版社曹定华主编课后答案∙11-21人大-吴赣昌-高等数学/微积分(经管类)课后答案∙11-09概率统计简明教程同济版课后答案∙11-09复变函数钟玉泉课后答案∙11-09微积分范培华章学诚刘西垣中国商业出版社课后答案∙11-09线性代数同济大学第四版课后答案∙11-08概率论与数理统计浙大版盛骤谢式千课后答案∙11-08复变函数西安交通大学第四版高等教育出版社课后答案∙11-07离散数学教程肖新攀编著课后习题答案∙11-07离散数学(第三版)清华大学出版社(耿素云,屈婉玲,张立昂)课后习题答案∙11-04高等数学同济大学出版社第六版课后答案∙10-27高等数学北大版课后答案∙【通信/电子/电气/自动化】∙01-08信号与线性系统分析吴大正第4版课后答案∙01-08信号与系统刘泉主编课后答案∙01-08信号与系统奥本海姆英文版课后答案∙01-08数字信号处理吴镇扬高等教育出版社课后答案∙01-08通信原理樊昌信第六版国防大学出版社课后答案∙01-08通信原理北京邮电大学课后答案∙12-10数字逻辑第四版(毛法尧著) 高等教育出版社∙12-10数字逻辑第二版(毛法尧著) 高等教育出版社课后答案∙12-08电路第五版邱关源罗先觉高等教育出版社课后答案∙12-03数字信号处理教程(程佩青第二版) 清华大学出版社课后答案∙12-02数字信号处理教程程佩青(第三版)清华大学出版社课后答案∙11-09模拟电子技术基础童诗白第三版习题答案∙11-09数字电子技术基础阎石第五版课后答案∙11-06信号与系统郑君里主编第二版课后答案∙11-06信号与系统哈工大课后答案∙10-31模拟电子技术基础(第四版童诗白、华成英主编)习题答案∙10-29模拟电路康华光【计算机/网络/信息】∙01-08数据结构(C语言版) 李春葆主编课后答案∙12-05计算机网络教程第五版谢希仁电子工业出版社课后答案∙11-09c程序设计谭浩强主编清华大学出版社习题答案及上机指导∙10-26C语言程序设计教程习题参考答案∙10-26MATLAB程序设计与应用(第二版)刘卫国主编实验答案【经济/金融/营销/管理/电子商务】∙01-06现代西方经济学(宏观)尹伯平主编课后答案∙01-06现代西方经济学(微观经济学) 宋承先主编第3版笔记和课后习题详解∙01-06微观经济学:现代观点范里安主编第5版课后答案∙01-05微观经济学平狄克主编第4和5版笔记和课后习题详解∙01-05宏观经济学曼昆主编第五版课后答案∙01-05宏观经济学多恩布什主编课后习题答案∙01-05企业会计学赵惠芳主编课后答案∙12-05市场调研与预测习题与实例陈启杰上海财经大学出版社课后答案∙11-28西方经济学高鸿业第四版(微观宏观)课后答案∙11-10中级财务会计刘兵初宜红山东人民出版社课后答案∙11-09经济法概论课后答案∙11-08中级财务会计(第二版)刘永泽东北财经大学课后答案【物理/光学/声学/热学/力学】∙01-19机电传动控制华中科技大学出版社邓星钟主编课后答案∙01-05量子力学张永德主编课后答案∙01-04量子力学导论曾谨言著第二版课后答案∙01-04量子力学曾谨言著高等教育出版社第三版第一卷课后答案∙01-04量子力学教程周世勋著高等教育出版社课后答案∙01-04量子力学教程曾谨言著课后答案∙01-04电动力学郭硕鸿主编第三版课后答案∙01-04理论力学卢圣治著课后答案∙01-03理论力学周衍柏著第二版课后答案∙11-09普通物理学程守洙江之咏第五版习题分析与解答∙11-09物理学马文蔚(第五版) 习题分析与解答∙11-09大学基础物理学.2版.清华.张三慧习题答案∙11-06大学物理学赵近芳主编第二版课后答案【土建/机械/车辆/制造/材料】∙01-08机械设计基础(第五版) 高等教育出版社课后答案∙01-07材料力学单辉祖主编课后答案∙01-06材料力学刘鸿文主编哈工大第四版课后答案∙11-11机械原理第六版课后答案【化学/环境/生物/医学/制药】∙01-03高分子化学潘祖仁著第四版课后答案∙01-03物理化学辅导与习题详解第五版傅献彩著∙01-02物理化学南开大学第五版课后答案∙01-02物理化学周亚平天津大学第四版课后答案∙01-02分析化学武汉大学第四版思考题答案∙01-02分析化学武汉大学第四版课后答案∙01-02基础有机化学邢其毅著课后答案∙01-01有机化学莫里森著课后答案∙12-31有机化学(第四版)高鸿宾著课后答案∙12-31有机化学(汪小兰著) 课后答案∙12-31无机化学第三版武汉大学吉林大学编高等教育出版社课后答案∙12-31中级无机化学(朱文祥著) 高等教育出版社课后答案∙12-31无机化学第三版(宋天佑著) 高等教育出版社课后答案∙12-30生物化学解题指导与测验张楚富高等教育出版社课后答案∙12-30生物化学简明教程第四版(张丽萍著) 高等教育出版社课后答案∙12-30生物化学原理(张洪渊著) 科学出版社课后答案∙12-30生物化学第三版(沈同王镜岩著) 高等教育出版社课后答案∙10-31有机化学第三版(胡宏纹著) 高等教育出版社课后答案∙10-29有机化学第四版答案曾昭琼主编高等教育出版社【法学/哲学/心理学/政治学】∙12-29实验心理学杨治良版练习题及答案07年心理学考研∙12-29《心理学》考试题库及答案程素萍浙江大学出版社∙12-29教育心理学第三版(皮连生著) 上海教育出版社课后答案∙12-04毛邓三(2007 华中科技大学版)(毛邓三编写组著) 高等教育出版社课后答案∙11-07毛邓三课后简答题答案∙10-29逻辑学参考答案∙10-26思想道德修养与法律基础罗国杰主编高教版课后答案∙10-26毛泽东思想和中国特色社会主义理论体系概论(吴树青等著) 高等教育出版社课后答案∙10-25马克思主义基本原理概论左伟清华南理工大学出版社课后答案∙10-25毛邓三思考题课后答案【英语/文学/史学/外语/教育】∙01-30step_by_step 2000 第四册听力答案课后答案∙01-30step_by_step 2000 第三册听力答案课后答案∙01-30step_by_step 2000 第二册听力答案课后答案∙01-30step_by_step 2000 第一册听力答案课后答案∙01-09大学体验英语综合教程第四册课后答案及课文翻译∙01-09大学体验英语综合教程第三册课后答案及课文翻译∙01-09大学体验英语综合教程第二册课后答案及课文翻译∙01-09大学体验英语综合教程第一册课后答案及课文翻译∙01-09新视野大学英语第五册课后答案∙01-09新视野大学英语第四册课后答案及课文翻译∙01-09新视野大学英语第三册课后答案及课文翻译∙01-09新视野大学英语第二册课后答案及课文翻译∙01-09新视野大学英语第一册课后答案及课文翻译∙01-05文学理论童庆炳主编修订二版课后答案∙01-05语言学教程胡壮麟主编课后答案[适合背诵]∙11-08中国近代史纲要沙健孙高等教育出版社课后答案∙11-07全新版大学英语综合教程第四册课后答案及课文翻译∙11-07全新版大学英语综合教程第三册课后答案及课文翻译∙11-06全新版大学英语综合教程第二册课后答案及课文翻译∙11-06全新版大学英语综合教程第一册课后答案及课文翻译∙11-06新世纪大学英语综合教程3 课后答案∙11-06新世纪大学英语综合教程2 课后答案∙11-06新世纪大学英语综合教程1 课后答案∙10-25新编大学英语(第一册)习题答案第二版∙10-25新编大学英语(第二册)习题答案∙10-25新编大学英语(第三册)习题答案10-25新编大学英语(第四册)课文翻译及课后习题答案。
理论力学答案完整版(清华大学出版社)1
第一章力和约束 习题解答
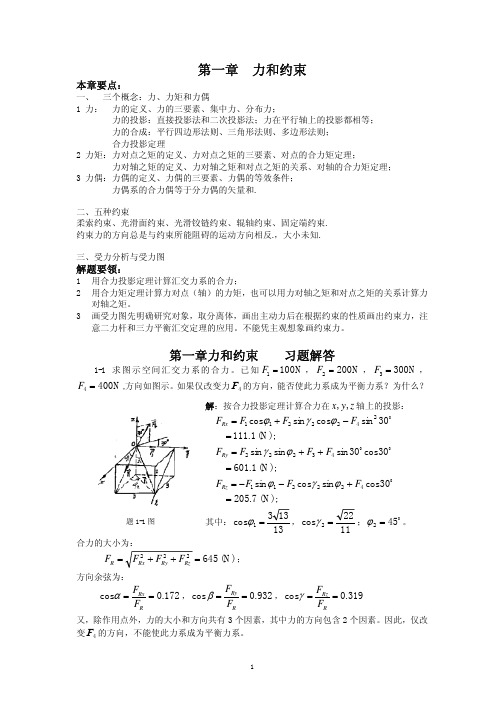
1-1 求 图 示 空 间 汇 交 力 系 的 合 力 。 已 知 F1 = 100N , F2 = 200N , F3 = 300N , F4 = 400N ,方向如图示。如果仅改变力 F4 的方向,能否使此力系成为平衡力系?为什么?
解:按合力投影定理计算合力在 x, y, z 轴上的投影: FRx = F1 cosϕ1 + F2 sin γ 2 cosϕ2 − F4 sin2 30o = 111.1 (N); FRy = F2 sin γ 2 sinϕ2 + F3 + F4 sin 30o cos30o
= 601.1 (N); FRz = −F1 sinϕ1 − F2 cosγ 2 sinϕ2 + F4 cos30o
题 1-9(a)图 (b)按三力平衡汇交定理画出整体的受力图,然后依次画出杆 CD、杆 AB、轮 D 的受力图。
题 1-9(b)图
5
(c)折杆 BC 为二力构件,约束力方向一定是沿着 BC 连线。因力偶只能与力偶平衡,所 以,铰链 A 和 B 处的约束力一定互相平行而组成力偶。
题 1-9(c)图 (d)图示结构中,杆 CE 为二力杆,其余杆件的受力按力偶平衡理论确定。
对 x, y, z 轴的力矩和,以及对坐标原点 O 的力矩和。
解:平面 abc 的法向量为 n = 1 i + 1 j + 1 k ,力偶矢为 ab c
M = Mn0 , 其中 i, j,k, n0 依次为 x, y, z, n 方向的单位向
量。力 F 表为 F = Fξ 0
其中ξ 0 为ξ = 1 (a i + b j) − ck 方向的单位向量。
大学所有课程课后答案

天天learn为大家收集了大学所有课程的课后答案,这里只列出了一部分,要想找到更多的答案,请到 查找。
资料打开方法:按住 Ctrl键,在你需要的资料上用鼠标左键单击资料搜索方法:Ctrl+F 输入关键词查找你要的资料【数学】∙01-08数值分析清华大学出版社第四版课后答案∙01-08微分几何第三版梅向明黄敬之主编课后答案∙01-07高等代数与解析几何陈志杰主编第二版课后答案∙01-07高等代数第三版北京大学数学系主编高等教育出版社出版课后答案∙01-07数学分析陈纪修主编第二版课后答案∙01-07数学分析华东师大第三版课后答案∙12-27高等数学同济大学出版社第五版课后答案∙12-08积分变换(第四版)东南大学数学系张元林编高等教育出版社课后答案∙11-30微积分复旦大学出版社曹定华主编课后答案∙11-21人大-吴赣昌-高等数学/微积分(经管类)课后答案∙11-09概率统计简明教程同济版课后答案∙11-09复变函数钟玉泉课后答案∙11-09微积分范培华章学诚刘西垣中国商业出版社课后答案∙11-09线性代数同济大学第四版课后答案∙11-08概率论与数理统计浙大版盛骤谢式千课后答案∙11-08复变函数西安交通大学第四版高等教育出版社课后答案∙11-07离散数学教程肖新攀编著课后习题答案∙11-07离散数学(第三版)清华大学出版社(耿素云,屈婉玲,张立昂)课后习题答案∙11-04高等数学同济大学出版社第六版课后答案∙10-27高等数学北大版课后答案∙【通信/电子/电气/自动化】∙01-08信号与线性系统分析吴大正第4版课后答案∙01-08信号与系统刘泉主编课后答案∙01-08信号与系统奥本海姆英文版课后答案∙01-08数字信号处理吴镇扬高等教育出版社课后答案∙01-08通信原理樊昌信第六版国防大学出版社课后答案∙01-08通信原理北京邮电大学课后答案∙12-10数字逻辑第四版(毛法尧著) 高等教育出版社∙12-10数字逻辑第二版(毛法尧著) 高等教育出版社课后答案∙12-08电路第五版邱关源罗先觉高等教育出版社课后答案∙12-03数字信号处理教程(程佩青第二版) 清华大学出版社课后答案∙12-02数字信号处理教程程佩青(第三版)清华大学出版社课后答案∙11-09模拟电子技术基础童诗白第三版习题答案∙11-09数字电子技术基础阎石第五版课后答案∙11-06信号与系统郑君里主编第二版课后答案∙11-06信号与系统哈工大课后答案∙10-31模拟电子技术基础(第四版童诗白、华成英主编)习题答案∙10-29模拟电路康华光【计算机/网络/信息】∙01-08数据结构(C语言版) 李春葆主编课后答案∙12-05计算机网络教程第五版谢希仁电子工业出版社课后答案∙11-09c程序设计谭浩强主编清华大学出版社习题答案及上机指导∙10-26C语言程序设计教程习题参考答案∙10-26MATLAB程序设计与应用(第二版)刘卫国主编实验答案【经济/金融/营销/管理/电子商务】∙01-06现代西方经济学(宏观)尹伯平主编课后答案∙01-06现代西方经济学(微观经济学) 宋承先主编第3版笔记和课后习题详解∙01-06微观经济学:现代观点范里安主编第5版课后答案∙01-05微观经济学平狄克主编第4和5版笔记和课后习题详解∙01-05宏观经济学曼昆主编第五版课后答案∙01-05宏观经济学多恩布什主编课后习题答案∙01-05企业会计学赵惠芳主编课后答案∙12-05市场调研与预测习题与实例陈启杰上海财经大学出版社课后答案∙11-28西方经济学高鸿业第四版(微观宏观)课后答案∙11-10中级财务会计刘兵初宜红山东人民出版社课后答案∙11-09经济法概论课后答案∙11-08中级财务会计(第二版)刘永泽东北财经大学课后答案【物理/光学/声学/热学/力学】∙01-19机电传动控制华中科技大学出版社邓星钟主编课后答案∙01-05量子力学张永德主编课后答案∙01-04量子力学导论曾谨言著第二版课后答案∙01-04量子力学曾谨言著高等教育出版社第三版第一卷课后答案∙01-04量子力学教程周世勋著高等教育出版社课后答案∙01-04量子力学教程曾谨言著课后答案∙01-04电动力学郭硕鸿主编第三版课后答案∙01-04理论力学卢圣治著课后答案∙01-03理论力学周衍柏著第二版课后答案∙11-09普通物理学程守洙江之咏第五版习题分析与解答∙11-09物理学马文蔚(第五版) 习题分析与解答∙11-09大学基础物理学.2版.清华.张三慧习题答案∙11-06大学物理学赵近芳主编第二版课后答案【土建/机械/车辆/制造/材料】∙01-08机械设计基础(第五版) 高等教育出版社课后答案∙01-07材料力学单辉祖主编课后答案∙01-06材料力学刘鸿文主编哈工大第四版课后答案∙11-11机械原理第六版课后答案【化学/环境/生物/医学/制药】∙01-03高分子化学潘祖仁著第四版课后答案∙01-03物理化学辅导与习题详解第五版傅献彩著∙01-02物理化学南开大学第五版课后答案∙01-02物理化学周亚平天津大学第四版课后答案∙01-02分析化学武汉大学第四版思考题答案∙01-02分析化学武汉大学第四版课后答案∙01-02基础有机化学邢其毅著课后答案∙01-01有机化学莫里森著课后答案∙12-31有机化学(第四版)高鸿宾著课后答案∙12-31有机化学(汪小兰著) 课后答案∙12-31无机化学第三版武汉大学吉林大学编高等教育出版社课后答案∙12-31中级无机化学(朱文祥著) 高等教育出版社课后答案∙12-31无机化学第三版(宋天佑著) 高等教育出版社课后答案∙12-30生物化学解题指导与测验张楚富高等教育出版社课后答案∙12-30生物化学简明教程第四版(张丽萍著) 高等教育出版社课后答案∙12-30生物化学原理(张洪渊著) 科学出版社课后答案∙12-30生物化学第三版(沈同王镜岩著) 高等教育出版社课后答案∙10-31有机化学第三版(胡宏纹著) 高等教育出版社课后答案∙10-29有机化学第四版答案曾昭琼主编高等教育出版社【法学/哲学/心理学/政治学】∙12-29实验心理学杨治良版练习题及答案07年心理学考研∙12-29《心理学》考试题库及答案程素萍浙江大学出版社∙12-29教育心理学第三版(皮连生著) 上海教育出版社课后答案∙12-04毛邓三(2007 华中科技大学版)(毛邓三编写组著) 高等教育出版社课后答案∙11-07毛邓三课后简答题答案∙10-29逻辑学参考答案∙10-26思想道德修养与法律基础罗国杰主编高教版课后答案∙10-26毛泽东思想和中国特色社会主义理论体系概论(吴树青等著) 高等教育出版社课后答案∙10-25马克思主义基本原理概论左伟清华南理工大学出版社课后答案∙10-25毛邓三思考题课后答案【英语/文学/史学/外语/教育】∙01-30step_by_step 2000 第四册听力答案课后答案∙01-30step_by_step 2000 第三册听力答案课后答案∙01-30step_by_step 2000 第二册听力答案课后答案∙01-30step_by_step 2000 第一册听力答案课后答案∙01-09大学体验英语综合教程第四册课后答案及课文翻译∙01-09大学体验英语综合教程第三册课后答案及课文翻译∙01-09大学体验英语综合教程第二册课后答案及课文翻译∙01-09大学体验英语综合教程第一册课后答案及课文翻译∙01-09新视野大学英语第五册课后答案∙01-09新视野大学英语第四册课后答案及课文翻译∙01-09新视野大学英语第三册课后答案及课文翻译∙01-09新视野大学英语第二册课后答案及课文翻译∙01-09新视野大学英语第一册课后答案及课文翻译∙01-05文学理论童庆炳主编修订二版课后答案∙01-05语言学教程胡壮麟主编课后答案[适合背诵]∙11-08中国近代史纲要沙健孙高等教育出版社课后答案∙11-07全新版大学英语综合教程第四册课后答案及课文翻译∙11-07全新版大学英语综合教程第三册课后答案及课文翻译∙11-06全新版大学英语综合教程第二册课后答案及课文翻译∙11-06全新版大学英语综合教程第一册课后答案及课文翻译∙11-06新世纪大学英语综合教程3 课后答案∙11-06新世纪大学英语综合教程2 课后答案∙11-06新世纪大学英语综合教程1 课后答案∙10-25新编大学英语(第一册)习题答案第二版∙10-25新编大学英语(第二册)习题答案∙10-25新编大学英语(第三册)习题答案∙10-25新编大学英语(第四册)课文翻译及课后习题答案。
清华理论力学课后答案2

kh da
(b)
w.
co
m
4
三角块 V4
V4 = 2 × 3 × 3 ÷ 2 = 9
(1, 7, 1)
2-5 均质折杆及尺寸如图示,求此折杆形心坐标。 解: 将图示折杆简化为折线计算。 折杆有 5 段直线组成, 每一段的长度及形心坐标如表所示。 按形心计算公式,有
xc =
∑iLi xi 200 × (−100) + 100 × (−50) + 100 × 0 + 200 × 100 + 100 × 200 = 200 + 100 + 100 + 200 + 100 ∑iLi = 21.43(mm)
kh da
,
w.
FRx ' = F1 cos 45� − F2 cos 45� = 0 ,
�
co
在坐标轴上的投影为
m
解: 各力均在与坐标平面平行的面内, 且与所在平面的棱边成 45°角。 将力系向 A 点简化, 主矢 FR '
a b c + + = 0。 F1 F2 F3
当主矢与主矩平行时,力系能简化为力螺旋,即从 FR '× M O = 0 得,
yc =
答
案
网
(200,100,-50)
ww w.
3
kh da
题 2-5 图
w.
co
m
题 2-6 图
解: 由对称性知,该图形的形心一定在 x 轴上,即 yc = 0 。用负面积法计算其横坐标。此平面图
按形心计算公式,有
xc =
2-7 工字钢截面尺寸如图示,求此截面的形心坐标。
题 2-7 图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-3 圆盘绕杆AB 以角速度rad/s 转动,AB 杆及框架则绕铅垂轴以角速度
100=Ω10=ωrad/s 转动。
已知mm ,当140=R °=90θ,rad/s ,时,试求圆盘上两相互垂直半径端点C 点及D 点的速度和加速度。
5.2=θ 0=θ
解:圆盘的运动是由三个定轴转动组成的复合运动,且三个轴交于O 点。
取O 点为基点,建立动坐标系Oxyz ,Oxyz 绕铅垂轴以角速度ω转动,则牵连角速度e ω=−ωk 。
圆盘相对于动坐标系的运动是由框架绕Ox 轴的转动和圆盘绕Oy 轴的转动组成,则圆盘的相对角速度为:
r θ
=−+Ωωi j 所以圆盘的绝对角速度为:
r θω′=−+Ω−e ω=ω+ωi j k
C 点及
D 点的矢径分别为:
0.140.5()C m =−+r i j
0.50.14()D m =+r j k
由公式可得C 点及D 点的速度:
=×v ωr 5 1.412.75(/)C C m s ′=×=++v ωr i j k
190.35 1.25(/)D D m s ′=×=+−v ωr i j k
下面来求加速度。
首先求圆盘相对于动系的相对角加速度ε,在动系中,我们可以步将
框架绕Ox 轴的转动看作牵连运动,牵连加速度为r 1e θ=−ωi 1r ,牵连角加速度为ε;将圆盘绕Oy 轴的转动看作相对运动,相对角速度为1e = θ
=Ωj 0ωθ
,相对角加速度为。
则根据角加速度合成公式并由此时1r 0==εΩ
e e r r =+×+εεωωε= 可得: 211250(/)r e r rad s θ
=×=−×Ω=−εωωi j k 接下来求圆盘的绝对角加速度,再次利用角加速度合成公式,并由0e =ε可得:
2100025250(/)e r r rad s ′=×+=+−εωωεi j k
利用公式a 可得C 点及D 点的加速度 :
(=×+××εr ωωr )
2141416.875(/)C m s =+a i j 27333.1252400.875(/)D m s =−−a i j k。