清华大学版理论力学课后习题答案大全
清华大学版理论力学课后习题答案大全_____第3章静力学平衡问题习题解
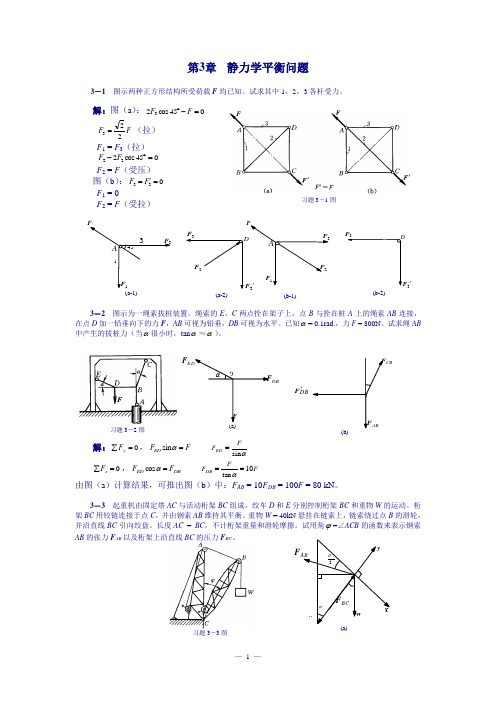
F DBCBDBF '习题3-3图第3章 静力学平衡问题3-1 图示两种正方形结构所受荷载F 均已知。
试求其中1,2,3各杆受力。
解:图(a ):045cos 23=-︒F FF F 223=(拉) F 1 = F 3(拉) 045cos 232=︒-F F F 2 = F (受压) 图(b ):033='=F F F 1 = 0F 2 = F (受拉)3-2 图示为一绳索拔桩装置。
绳索的E 、C 两点拴在架子上,点B 与拴在桩A 上的绳索AB 连接,在点D 加一铅垂向下的力F ,AB 可视为铅垂,DB 可视为水平。
已知α= 0.1rad.,力F = 800N 。
试求绳AB 中产生的拔桩力(当α很小时,tan α≈α)。
解:0=∑y F ,F F ED =αsin αs i nFF ED = 0=∑x F ,DB ED F F =αcos F FF DB 10tan ==α由图(a )计算结果,可推出图(b )中:F AB = 10F DB = 100F = 80 kN 。
3-3 起重机由固定塔AC 与活动桁架BC 组成,绞车D 和E 分别控制桁架BC 和重物W 的运动。
桁架BC 用铰链连接于点C ,并由钢索AB 维持其平衡。
重物W = 40kN 悬挂在链索上,链索绕过点B 的滑轮,并沿直线BC 引向绞盘。
长度AC = BC ,不计桁架重量和滑轮摩擦。
试用角ϕ=∠ACB 的函数来表示钢索AB 的张力F AB 以及桁架上沿直线BC 的压力F BC 。
(b-1)习题3-1图(a-1)(a-2)'3(b-2)习题3-2图F习题3-5图习题3-4图 解:图(a ):0=∑x F ,0sin 2cos=-ϕϕW F AB ,2sin2ϕW F AB =0=∑y F ,02sincos =---ϕϕAB BC F W W F即 2s i n 2c o s 2ϕϕW W W F BC ++=W W W W 2)c o s 1(c o s =-++=ϕϕ3-4 杆AB 及其两端滚子的整体重心在G 点,滚子搁置在倾斜的光滑刚性平面上,如图所示。
【最新试题库含答案】清华理论力学课后答案4
清华理论力学课后答案4篇一:理论力学课后习题答案第4章运动分析基础第4章运动分析基础4-1 小环A套在光滑的钢丝圈上运动,钢丝圈半径为R(如图所示)。
已知小环的初速度为v0,并且在运动过程中小环的速度和加速度成定角θ,且 0 <θ<?,试确定小环2A的运动规律。
22解:asin??a?v,a?v nRsin?R2vdvt1a?dv?acos??v,?dt t2??v00vdtRtan?Rtan?v?ds?v0Rtan?dtRtan??v0tstv0Rtan?ds??0?0Rtan??v0tdtAs?Rtan?lnRtan?Rtan??v0t习题4-1图2??x?3sint?x?4t?2t1.?, 2.?2y?2cos2t?y?3t?1.5t??4-2 已知运动方程如下,试画出轨迹曲线、不同瞬时点的解:1.由已知得 3x = 4y ? v?5?5t?y?3?3t? ?a??5 ??y??3????4x????4?4t?x(1)为匀减速直线运动,轨迹如图(a),其v、a图像从略。
2.由已知,得arcsinx3?12arccosy242(b)习题4-2图化简得轨迹方程:y?2?x9(2)轨迹如图(b),其v、a图像从略。
4-3 点作圆周运动,孤坐标的原点在O点,顺钟向为孤坐标的正方向,运动方程为s?12?Rt2,式中s以厘米计,t以秒计。
轨迹图形和直角坐标的关系如右图所示。
当点第一次到达y坐标值最大的位置时,求点的加速度在x和y轴上的投影。
解:v?s???Rt,at?v???R,an?v??2Rt2y坐标值最大的位置时:?s? ax?at??R,ay???R22R12?Rt2??22R,?t?1习题4-3图4-4 滑块A,用绳索牵引沿水平导轨滑动,绳的另一端绕在半径为r 的鼓轮上,鼓轮以匀角速度ω转动,如图所示。
试求滑块的速度随距离x 的变化规律。
解:设t = 0时AB长度为l0,则t时刻有:r (?t?arcta?arctan)r?l?x2?r2l0x2?r2对时间求导:?r??r2x22xx?r?rx ???xx2?r2???xxx?r224-5 凸轮顶板机构中,偏心凸轮的半径为R,偏心距OC = e,绕轴O以等角速转动,从而带动顶板A作平移。
清华大学版理论力学课后习题答案大全-----第5章点的复合运动分析
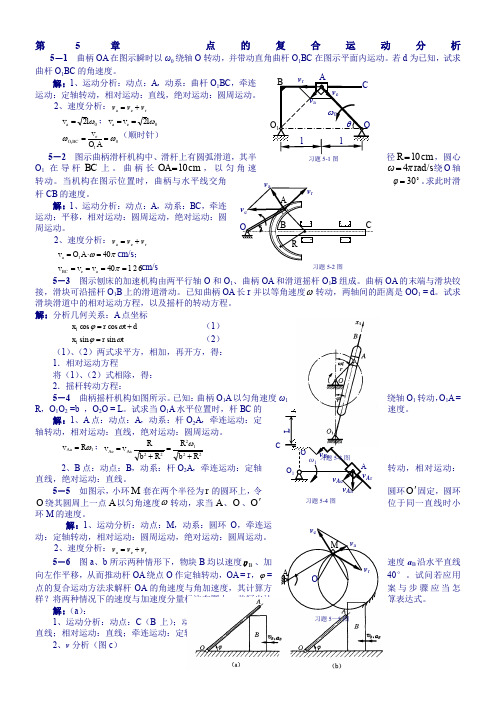
第5章 点的复合运动分析5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。
若d 为已知,试求曲杆O 1BC 的角速度。
解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1ωω==AO v BC O (顺时针)5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。
曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴30=φ。
求此时滑转动。
当机构在图示位置时,曲柄与水平线交角杆CB 的速度。
解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。
2、速度分析:r e a v v v += πω401a =⋅=A O v cm/s ; 12640a e ====πv v v BC cm/s5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。
曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。
已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。
试求滑块滑道中的相对运动方程,以及摇杆的转动方程。
解:分析几何关系:A 点坐标 d t r x +=ωϕcos cos 1 (1) t r x ωϕsin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 将(1)、(2)式相除,得: 2.摇杆转动方程:5-4 曲柄摇杆机构如图所示。
已知:曲柄O 1A 以匀角速度ω1绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。
试求当O 1A 水平位置时,杆BC 的速度。
解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。
理论力学答案完整版(清华大学出版社)1
第一章力和约束 习题解答
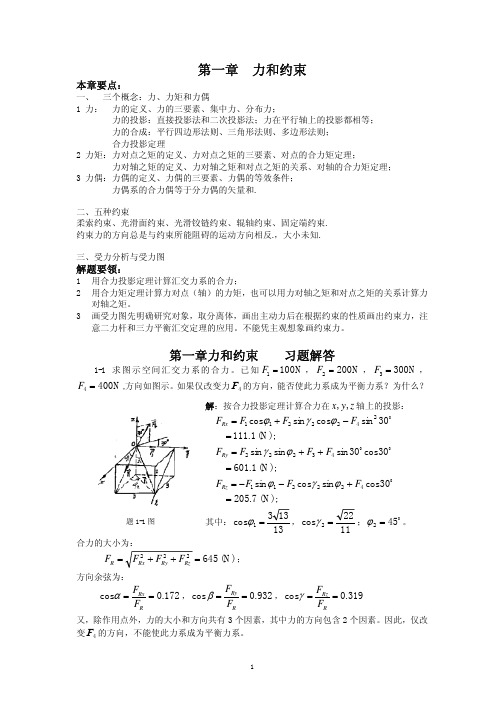
1-1 求 图 示 空 间 汇 交 力 系 的 合 力 。 已 知 F1 = 100N , F2 = 200N , F3 = 300N , F4 = 400N ,方向如图示。如果仅改变力 F4 的方向,能否使此力系成为平衡力系?为什么?
解:按合力投影定理计算合力在 x, y, z 轴上的投影: FRx = F1 cosϕ1 + F2 sin γ 2 cosϕ2 − F4 sin2 30o = 111.1 (N); FRy = F2 sin γ 2 sinϕ2 + F3 + F4 sin 30o cos30o
= 601.1 (N); FRz = −F1 sinϕ1 − F2 cosγ 2 sinϕ2 + F4 cos30o
题 1-9(a)图 (b)按三力平衡汇交定理画出整体的受力图,然后依次画出杆 CD、杆 AB、轮 D 的受力图。
题 1-9(b)图
5
(c)折杆 BC 为二力构件,约束力方向一定是沿着 BC 连线。因力偶只能与力偶平衡,所 以,铰链 A 和 B 处的约束力一定互相平行而组成力偶。
题 1-9(c)图 (d)图示结构中,杆 CE 为二力杆,其余杆件的受力按力偶平衡理论确定。
对 x, y, z 轴的力矩和,以及对坐标原点 O 的力矩和。
解:平面 abc 的法向量为 n = 1 i + 1 j + 1 k ,力偶矢为 ab c
M = Mn0 , 其中 i, j,k, n0 依次为 x, y, z, n 方向的单位向
量。力 F 表为 F = Fξ 0
其中ξ 0 为ξ = 1 (a i + b j) − ck 方向的单位向量。
理论力学答案完整版(清华大学出版社)9

F1 = F1(sinϑ i − cosϑ j) , F2 = F2i
点 A 和 B 的坐标及其变分为
rA = −(l1 − l2 )cosϑ i + (l1 + l2 )sinϑ j
,
rB = −2l1 cosϑ i
δrA = (l1 − l2 )sinϑ ⋅δϑ i + (l1 + l2 )cosϑ ⋅δϑ j ,
Fδ re − G1δ ra = 0 按速度合成定理,虚位移存在如下关系:δ ra = δ re tan β ,于是
(a)
题 9-9 图
导出 F = G1 tan β .
(2)水平面有摩擦时,当水平力 F 较小,斜面 D 有向左运动趋势,此时摩擦力方向向右,
临界平衡时,虚功方程为
(F + ) Fmax δ re − G1δ ra = 0 , 其中 Fmax = (G1 + G2 ) f 。求得: F ≥ G1 tan β − (G1 + G2 ) f .
i =1
解题要领 1) 对于自由度不为零的系统,求其平衡时主动力满足的关系可用虚功原理. 2) 对于自由度为零的系统,为求其约束力,可以依次解除一个约束,使自由度为 1,即将
此约束力作为主动力应用虚功原理. 3) 独立的坐标变分个数与系统的自由度相同,可以用解析或虚速度的方法建立不独立的坐
标变分满足的关系.
三 广义坐标表示的虚位移原理
广义坐标:确定质点系位形的独立坐标。
虚功原理的广义坐标表述:受理想约束的质点系,其平衡的充分必要条件是系统所有与广义
坐标对应的广义力为零
Qj = 0 ( j = 1,2,L, m)
∑ 其中
Qj
=
清华大学版理论力学课后习题答案大全第10章动能定理及其应用习题解

CA(a)ωO(a)第10章动能定理及其应用10-1计算图示各系统的动能:1.质量为m ,半径为r 的均质圆盘在其自身平面内作平面运动。
在图示位置时,若已知圆盘上A、B 两点的速度方向如图示,B 点的速度为v B ,θ =45º(图a )。
2.图示质量为m 1的均质杆OA ,一端铰接在质量为m 2的均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动,圆心速度为v (图b )。
3.质量为m 的均质细圆环半径为R ,其上固结一个质量也为m 的质点A 。
细圆环在水平面上作纯滚动,图示瞬时角速度为ω(图c )。
解:1.2222221632(2121)2(212121B B B C C C mv r v mr v m J mv T =⋅+=+=ω2.222122222214321(21212121vm v m r v r m v m v m T +=⋅++=3.22222222)2(212121ωωωωmR R m mR mR T =++=10-2图示滑块A 重力为1W ,可在滑道内滑动,与滑块A 用铰链连接的是重力为2W 、长为l 的匀质杆AB 。
现已知道滑块沿滑道的速度为1v ,杆AB 的角速度为1ω。
当杆与铅垂线的夹角为ϕ时,试求系统的动能。
解:图(a )BA T T T +=)2121(21222211ωC C J v g W v g W ++=21221121212211122]cos 22)2[(22ωϕω⋅⋅+⋅++++=l g W l l v l v l g W v g W ]cos 31)[(2111221222121ϕωωv l W l W v W W g +++=10-3重力为P F 、半径为r 的齿轮II 与半径为r R 3=的固定内齿轮I 相啮合。
齿轮II 通过匀质的曲柄OC 带动而运动。
曲柄的重力为Q F ,角速度为ω,齿轮可视为匀质圆盘。
试求行星齿轮机构的动能。
理论力学解答(清华版)

第一章 静力学基本概念1-1 考虑力对物体作用的运动效应,力是( A )。
A.滑动矢量B.自由矢量C.定位矢量1-2 如图1-18所示,作用在物体A 上的两个大小不等的力1F 和2F ,沿同一直线但方向相反,则其合力可表为( C )。
A.1F –2FB.2F - 1FC.1F +2F图1-18 图1-191-3 F =100N ,方向如图1-19所示。
若将F 沿图示x ,y 方向分解,则x 方向分力的大小x F = C N ,y 方向分力的大小y F = ___B __ N 。
A. 86.6B. 70.0C. 136.6D.25.91-4 力的可传性只适用于 A 。
A. 刚体B. 变形体1-5 加减平衡力系公理适用于 C 。
A. 刚体;B. 变形体;C. 刚体和变形体。
1-6 如图1-20所示,已知一正方体,各边长a ,沿对角线BH 作用一个力F ,则该力在x 1轴上的投影为 A 。
A. 0B. F/2C. F/6D.-F/31-7如图1-20所示,已知F=100N ,则其在三个坐标轴上的投影分别为: Fx = -402N ,Fy = 302N ,Fz = 502 N 。
图1-20 图1-21第二章力系的简化2-1.通过A(3,0,0),B(0,4,5)两点(长度单位为米),且由A指向B的力F,在z轴上投影为,对z轴的矩的大小为。
答:F/2;62F/5。
2-2.已知力F的大小,角度φ和θ,以及长方体的边长a,b,c,则力F在轴z和y上的投影:Fz= ;Fy= ;F对轴x的矩M x(F)= 。
答:Fz=F·sinφ;Fy=-F·cosφ·cosφ;Mx(F)=F(b·sinφ+c·cosφ·cosθ)图2-40 图2-412-3.力通过A(3,4、0),B(0,4,4)两点(长度单位为米),若F=100N,则该力在x轴上的投影为,对x轴的矩为。
清华理论力学课后答案2

kh da
(b)
w.
co
m
4
三角块 V4
V4 = 2 × 3 × 3 ÷ 2 = 9
(1, 7, 1)
2-5 均质折杆及尺寸如图示,求此折杆形心坐标。 解: 将图示折杆简化为折线计算。 折杆有 5 段直线组成, 每一段的长度及形心坐标如表所示。 按形心计算公式,有
xc =
∑iLi xi 200 × (−100) + 100 × (−50) + 100 × 0 + 200 × 100 + 100 × 200 = 200 + 100 + 100 + 200 + 100 ∑iLi = 21.43(mm)
kh da
,
w.
FRx ' = F1 cos 45� − F2 cos 45� = 0 ,
�
co
在坐标轴上的投影为
m
解: 各力均在与坐标平面平行的面内, 且与所在平面的棱边成 45°角。 将力系向 A 点简化, 主矢 FR '
a b c + + = 0。 F1 F2 F3
当主矢与主矩平行时,力系能简化为力螺旋,即从 FR '× M O = 0 得,
yc =
答
案
网
(200,100,-50)
ww w.
3
kh da
题 2-5 图
w.
co
m
题 2-6 图
解: 由对称性知,该图形的形心一定在 x 轴上,即 yc = 0 。用负面积法计算其横坐标。此平面图
按形心计算公式,有
xc =
2-7 工字钢截面尺寸如图示,求此截面的形心坐标。
题 2-7 图
清华大学版理论力学课后习题答案大全
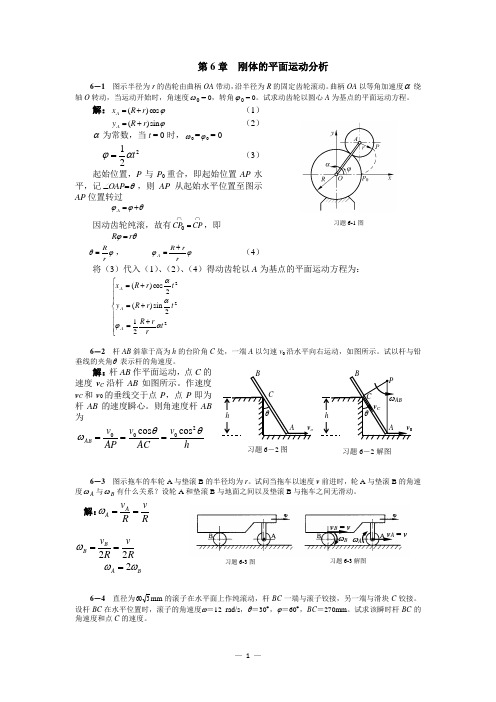
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕc o s )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角θ 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωR v R v B B 22==ωB A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30︒,ϕ=60︒,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
理论力学清华大学姚林泉答案第一章
理论力学清华大学姚林泉答案第一章1.答:平均速度是运动质点在某一时间间隔/一)/+A/内位矢大小和方向改变的平均快慢速度,其方向沿位移的方向即沿A/对应的轨迹割线方向;瞬时速度是运动质点在某时刻或某未知位矢和方向变化的快慢程度其方向沿该时刻质点所在点轨迹的切线方向。
在A/>0的极限情况,二者一致,在匀速直线运动中二者也一致的。
2.答:质点运动时,径向速度V,和横向速度V。
的大小、方向都改变,而a中的只反映了V。
本身大小的改变,ao中的,陌+r6只是V。
本身大小的改变。
事实上,横向速度V。
方向的改变会引起径向速度V,大小大改变,,62就是反映这种改变的加速度分量:经向速度V,的方向改变也引起V。
的大小改变,另一个海即为反映这种改变的加速度分量,故a。
=-/62,ao=/6+2/6.。
这表示质点的径向与横向运动在相互影响,它们一起才能完整地描述质点的运动变化情况3.答:内禀方程中,a。
是由于速度方向的改变产生的,在空间曲线中,由于a恒位于密切面内,速度v总是沿轨迹的切线方向,而a。
垂白于v指向曲线凹陷一方,故a,总是沿助法线方向。
质点沿空间曲线运动时,a。
=0,万0z何与牛顿运动定律不矛盾。
因质点除受作用力F,还受到被动的约反作川力R,二者在副法线方向的分量成平衡力2+R。
=0,故a。
=0符合牛顿运动率。
有人会问:约束反作用力靠谁施加,当然是与质点接触的周围其他物体由于受到质点的作用而对质点产生的反作用力。
有人也许还会问:某时刻若E与R,大小不等,a。
就不为零了?当然是这样,但此时刻质点受合力的方向与原来不同,质点的位置也在改变,副法线在空间中方位也不再是原来a。
所在的方位,又有了新的副法线,在新的副法线上仍满足瓦+R,=0即a,=0.这反映了牛顿定律得瞬时性和矢量性,也反映了自然坐标系的方向虽质点的运动而变。
4.答:质点在直线运动中只有a而无a,质点的匀速曲线运动中只有a,而无a;质点作变速运动时即有a又有a。
清华大学版理论力学课后习题答案大全第13章 动力学普遍方程习题解
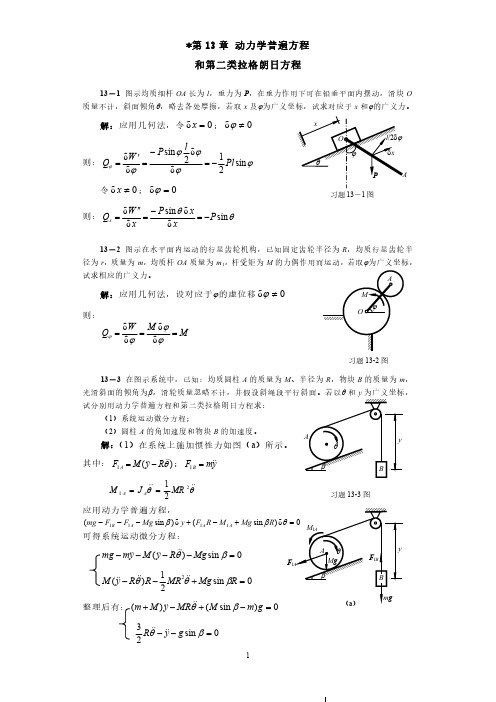
习题13-1图*第13章动力学普遍方程和第二类拉格朗日方程13-1图示均质细杆OA 长为l ,重力为P ,在重力作用下可在铅垂平面内摆动,滑块O 质量不计,斜面倾角θ,略去各处摩擦,若取x 及ϕ为广义坐标,试求对应于x 和ϕ的广义力。
解:应用几何法,令0δ=x ;0δ≠ϕ则:ϕϕϕϕϕϕsin 21δδ2sin δδPl lP W Q -=-='=令0δ≠x ;0δ=ϕ则:θθsin δδsin δδP xxP x W Q x -=-=''=13-2图示在水平面内运动的行星齿轮机构,已知固定齿轮半径为R ,均质行星齿轮半径为r ,质量为m ,均质杆OA 质量为m 1,杆受矩为M 的力偶作用而运动,若取ϕ为广义坐标,试求相应的广义力。
解:应用几何法,设对应于ϕ的虚位移0δ≠ϕ则:M M W Q ===ϕϕϕϕδδδδ13-3在图示系统中,已知:均质圆柱A 的质量为M 、半径为R ,物块B 的质量为m ,光滑斜面的倾角为β,滑轮质量忽略不计,并假设斜绳段平行斜面。
若以θ 和y 为广义坐标,试分别用动力学普遍方程和第二类拉格朗日方程求:(1)系统运动微分方程;(2)圆柱A 的角加速度和物块B 的加速度。
解:(1)在系统上施加惯性力如图(a )所示。
其中:)(I θ R y M F A -=;y m F B=I θθ2I 21MR J M A A ==应用动力学普遍方程,δ)sin (δ)sin (I I I I +-+---θββR Mg M R F y Mg F F mg A A A B 可得系统运动微分方程:0sin )(=----βθMg R y M y m mg 0sin 21)(2=+--R Mg MR R R yM βθθ 整理后有:0)sin ()(=-+-+g m M MR yM m βθ 0sin 23=--βθg yR习题13-2图习题13-3图F应用第二类拉格朗日方程:2222)(21212121θθ R y M MR y m T -+⋅+=;)(sin θβR y Mg mgy V -+-==-=V T L 2222)(21212121θθ R y M MR y m -+⋅+)(sin θβR y Mg mgy --+)(d d θ R yM y m y L t -+=∂∂;βsin Mg mg y L -=∂∂0d d =∂∂-∂∂y L y L t ;0)sin ()(=-+-+g m M MR y M m βθ (a ))(21d d 2θθθ R y RM MR L t --=∂∂;R Mg L βθsin =∂∂0d d =∂∂-∂∂θθL L t;0sin 23=--βθg y R (b )(2)求圆柱A 的角加速度和物块B 的加速度。
清华大学-理论力学-习题解答-6-8

Y X m1g m2g
由质心运动定理
《理论力学》习题解答
习题6-8 图示匀质细杆 OA 和 EC 的质量 分别为 m1 = 50 kg 和 m2 = 100 kg, 并在点 A 焊成一体。若此结构 在图示位置由静止状态释放, 计算刚释放时,铰链 O 处的约 束力和杆 EC在A处的弯矩。不 计铰链摩擦。
《理论力学》习题解答
解:1. 计算刚释放时铰链O的约束力 由定轴转动运动微分方程得:
解得: M A = (Y + S )l1 − M S − m1 g
= 272.225 N ⋅ m
l1 2
m1 !! x C1 + m 2 !! xC2 = X
X =0
m1 !! y C1 + m 2 !! y C 2 = Y − m1 g − m 2 g
Y = m1 g + m 2 g + m1 !! y C1 + m 2 !! yC2 = ( m1 + m 2 ) g − m1l1ε / 2 − m 2 l1ε = 449.167N
《理论力学》习题解答
2. 求杆EC在A处的弯矩 取杆OA为研究对象,将其惯性力系向O点简化,受 力图如图示,其中惯性力S和惯
MS = m l ε /3
2 1 1
O Y
Ms
A m1g
对A点列写力矩平衡方程:
理论力学答案完整版(清华大学出版社)10

子 C 沿水平轨道滚动而不滑动,试求重物 A 的加速度。
解: 取整个系统为研究对象,自由度为 1。设重物速度为 vA ,则轮
题 10-9 图
的角速度 ω = vA ,轮心速度为 R−r
vO
=
R
r −
r
vA 。系统的动能为
( ) T
拉格朗日方程的普遍形式
d dt
∂L ∂q& j
− ∂L ∂q j
= Q′j
( j = 1,2,..., m)
式中 Q′j 为非有势力对应的广义力。
矢量方法
动量法:动量定理
动量矩定理 质心运动定理 定轴转动微分方程 平面运动微分方程
质点系统动力学
动静法
动能定理
能量方法
拉格朗日方程
3 保守系统拉格朗日方程的初积分
10-3 质量为 m1 的匀质杆,长为 l,一端放在水平面上, 另一端与质量为 m2、半径为 r 的匀质圆盘在圆盘中心 O 点 铰接。圆盘在地面上作纯滚动,圆心速度为 v。求系统在此
题 10-3 图
位置的动能。
解:杆作平移,动能为
T1
=
1 2
m1v2
;
圆盘作纯滚动,动能为
T2
=
1 2
m2v2
+
1 2
mivi
⋅ vi
,
其中 n 为系统中的质点数目,可以是有限或无穷,mi 和 vi 分别为各质点的质量和速度。 平
移刚体的动能 T = 1 mv2 , 2
其中 m 为平移刚体的质量。
定轴转动刚体的动能
T
=
1 2
理论力学课后习题答案_清华大学出版社_2004年版_范钦珊,刘燕,王琪 编著
习题 1-1 图
y
y2
F
F y1
F y1
F y2 F y2
F
Fx1 Fx1
(c)
x
F x2
Fx 2
x2
(d)
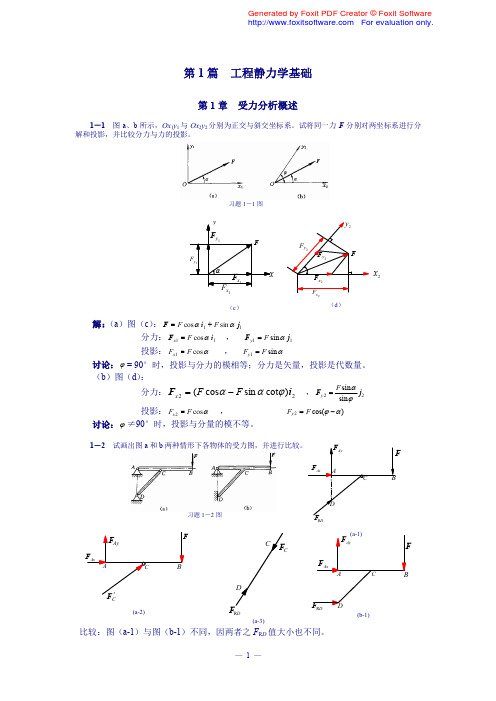
解: (a)图(c) : F F cos i1 F sin j1 分力: F x1 F cos i1 投影: Fx1 F cos , ,
F y1 F sin j1 Fy1 F sin
讨论: = 90°时,投影与分力的模相等;分力是矢量,投影是代数量。 (b)图(d) : 分力: F x 2 ( F cos F sin cot ) i 2 投影: Fx 2 F cos , 讨论: ≠90°时,投影与分量的模不等。
1-2 试画出图 a 和 b 两种情形下各物体的受力图,并进行比较。
F Ax
, Fy 2
F sin j2 sin
Fy 2 F cos( )
FAy
A
C
F
B
D
习题 1-2 图
FRD
FAy
F Ax
A
C
F
C
FC
F Ax
FAy
(a-1)
F
C
B
A
B
D
' FC
(a-2)
FRD
(a-3)
FRD
D
(b-1)
比较:图(a-1)与图(b-1)不同,因两者之 FRD 值大小也不同。
解: 图(a) : 2F3 cos 45 F 0
F3 2 F (拉) 2
F1 = F3(拉)
F2 2 F3 cos 45 0
F2 = F(受压) 图(b) : F3 F3 0 F1 = 0 F2 = F(受拉)
清华大学版理论力学课后习题答案大全(免费下载)(第9章动量矩

清华大学版理论力学课后习题答案大全(免费下载)(第9章动量矩第9章动量矩定理及其应用9-1在下列条件下计算系统的动量矩。
1.圆盘以ω的角速度绕o轴转动,质量为m的小球m可沿圆盘的径向凹槽运动,图示瞬时小球以相对于圆盘的速度vr运动到om=s处(图a);求小球对o点的动量矩。
2.图中质量为m的偏心轮在水平面上作平面运动。
车轮中心为a,质心为C,AC=E;车轮半径为R,车轮中心a的惯性矩为JA;c、 a点和B点位于同一铅垂线上(图B)。
(1)当车轮仅滚动而不滑动时,如果VA已知,则计算车轮的动量和到B点的动量矩;(2)当车轮滚动和滑动时,如果VAω已知,求车轮的动量和B点的动量矩。
解:1。
瞧?MS2(逆)2,(1)vrωmoωab(a)crvaep?mvc?m(va??e)?mva(1?)(逆)rv(r?e)2lb?mvc(r?e)?jc??mva?(ja?me2)arr(b)(2)p?mvc?m(va??e)图9-1lb?mvc(r?e)?jc??m(va??e)(r?e)?(ja?me2)??m(r?e)va?(ja?mer)?9-2在图中所示的系统中,已知滚筒绕O轴旋转的角速度ω,其大半径和小半径分别为R和R,相对于O轴的惯性矩为Jo;a区和B区的质量分别为ma和MB;试着找出系统相对于O轴的动量矩。
ω或解:Rlo?(jo?mar2?mbr2)?练习a的图9-2bθ9-3图中所示的均质细杆OA和EC的质量分别为50kg和100kg,它们在a点焊接在一起。
如果结构在图中所示的位置从静态状态下释放,计算刚释放时杆的角加速度和铰链o处的约束力。
没有铰链摩擦。
解:令m=moa=50kg,则mec=2m质心d位置:(设l=1m)d?od?l255l?m66foxfoymgd2mg刚体作定轴转动,初瞬时ω=0jo??mg??2mg?ljo?ml2?即3ml2??131?2m?(2l)2?2ml2?3ml212习题20-3图D习题20-3解图5mgl2??5g?8.17rad/2s6l525tad?lg636由质心运动定理:3m?ad?3mg?foyt2511g?mg?449n(↑)3612n?0,福克斯?0,阿德福?3毫克?3米-1-9-4绞车机构如图所示,能绕固定轴旋转的B轮和C轮的半径分别为R和R,各自旋转轴的惯性矩分别为J1和J2。
理论力学答案完整版(清华大学出版社)3

之差称为静不定次数。这类问题需要补充与静不定次数相同数量的变形协调方程才能求解。 未知约束力分量的数目小于独立平衡方程的数目,这类平衡问题是不存在的。 解题要领:
(2)AD 梁上,固定铰链 A 处有 2 个约束力,辊轴铰链 B、C 和 D 各有 1 个约束力, 共有 5 个约束力,这 5 个约束力组成平面一般力系,可以列出 3 个独立的平衡方程。所以, AD 梁是 2 次静不定。
(3)曲梁 AB 两端都是固定端约束,各有 3 个共 6 个约束力组成平面一般力系,而独 立的平衡方程只有 3 个。所以是 3 次静不定。
2 要区分物体维持平衡时的摩擦力与能够产生的最大静摩擦力,两者不可混淆。 3 有摩擦时的平衡问题往往还伴随物体的翻倒问题,要全面考虑,择其合理解。 4 自锁问题通常利用摩擦角概念和二力平衡条件或三力平衡汇交定理解题,具有几何直观、 概念清楚和便于理解的特点。关键是要确定临界平衡时的摩擦角。 5 滚动摩擦问题的考虑类似于滑动摩擦问题。
FA = 63.22 kN . ∑ Fy = 0, FA + FC sin 60o + FB − F1 sin 60o − F2 − q × 3 = 0 ,
FB = 88.74 kN .
题 3-3(a)图
(b)解:以 AB 以梁为研究对象,画受力图,列平衡方程
∑ Fx = 0 , FD cos 45o − FB cos 45o − F2 cos30o = 0 , ∑ mC = 0, FD sin 45o × 4 + FB sin 45o × 8 − M − F1 × 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R yt r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωR v R v B B 22==ωB A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度=12 rad/s ,=30,=60,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
习题6-1图A BCv 0h习题6-2图 P ABv CA BCv o h习题6-2解图习题6-3解图习题6-3图 v A = vv B = v习题6-6图习题6-6解图解:杆BC 的瞬心在点P ,滚子O 的瞬心在点D BDv B ⋅=ωBPBD BP v B BC ⋅==ωω ︒︒⨯=30sin 27030cos 36012 rad/s 8=PC v BC C ⋅=ωm/s 87.130cos 27.08=︒⨯=6-5 在下列机构中,那些构件做平面运动,画出它们图示位置的速度瞬心。
解:图(a )中平面运动的瞬心在点O ,杆BC 的瞬心在点C 。
图(b )中平面运动的杆BC 的瞬心在点P ,杆AD 做瞬时平移。
6-6 图示的四连杆机械OABO 1中,OA = O 1B =21AB ,曲柄OA 的角速度ω= 3rad/s 。
试求当示。
ϕ= 90°而曲柄O 1B 重合于OO 1的延长线上时,杆AB 和曲柄O 1B 的角速度。
解:杆AB 的瞬心在O3===ωωOAv AAB rad/s ωl v B 3= 2.531===ωωlv BB O rad/s习题6-5图习题6-4图习题6-4解图BC习题6-5解图(a)(a)(b)6-7 绕电话线的卷轴在水平地面上作纯滚动,线上的点A 有向右的速度v A = s ,试求卷轴中心O 的速度与卷轴的角速度,并问此时卷轴是向左,还是向右方滚动?解:如图333.16.08.03.09.0==-=A O v ωrad/s2.1689.09.0=⨯==O O v ωm/s卷轴向右滚动。
6-8 图示两齿条以速度1v 和2v 作同方向运动,在两齿条间夹一齿轮,其半径为r ,求齿轮的角速度及其中心O 的速度。
解:如图,以O 为基点: r v v O O ω+=1r v v O O ω-=2解得:221v v v O +=r v v O 221-=ω6-9 曲柄-滑块机构中,如曲柄角速度ω= 20rad/s ,试求当曲柄OA 在两铅垂位置和两水平位置时配汽机构中气阀推杆DE 的速度。
已知OA = 400mm ,AC = CB = 20037mm 。
解:OA 定轴转动;AB 、CD 平面运动,DE 平移。
1.当ϕ= 90°,270°时,OA 处于铅垂位置,图(a )表示ϕ= 90°情形,此时AB 瞬时平移,v C 水平,而v D 只能沿铅垂, D 为CD 之瞬心 v DE = 0同理,ϕ= 270°时,v DE = 02.ϕ= 180°,0°时,杆AB 的瞬心在B ϕ= 0°时,图(b ),A C v v 21=(↑) 此时CD 杆瞬时平移421====A C D DE v v v v m/s (↑) 同理ϕ= 180°时,v DE = 4m/s (↓)6-10 杆AB 长为l = m ,一端铰接在半径为r = m 的轮缘上,另一端放在水平面上,如图所示。
轮沿地面作纯滚动,已知轮心O 速度的大小为v O = 20 m/s 。
试求图示瞬时(OA 水平)B 点的速度以及轮和杆的角速度。
习题6-7图1vOO习题6-8图 习题6-8解图习题6-9图习题6-9解图解:轮O 的速度瞬心为点C ,杆AB 的速度瞬心为点P 405.020===r v O O ωrad/s 2202==r v O A ωm/s θωcos 5.145sin 220︒==AP v A AB 210== rad/s)45cos(cos θθ+︒=A B v v9.12)tan 45sin 45(cos 220=︒-︒=θB v m/s6-11 图示滑轮组中,绳索以速度v C = s 下降,各轮半径已知,如图示。
假设绳在轮上不打滑,试求轮B 的角速度与重物D 的速度。
解:轮B 瞬心在F 点 v E = v C 112.012.0102603==⨯⨯=-EB v ωrad/s 06.02121====C E B D v v v v m/s习题6-11图6-12 链杆式摆动传动机构如图所示,DCEA 为一摇杆,且CA ⊥DE 。
曲柄OA = 200mm ,CO = CE = 250mm ,曲柄转速n = 70r/min ,CO = 2003mm 。
试求当ϕ= 90°时(这时OA 与CA 成60°角)F 、G 两点的速度的大小和方向。
解:动点:OA 上A ;动系:DCEA ;绝对运动:圆周;相对运动:直线;牵连运动:定轴转动。
3π4.130π2.0=⨯=⋅=n OA v A ωm/s π37.021e ==A v v m/s 12π74.03π7.0e e =⨯==CA v ωrad/s 48π7254.0===e D E v v ωm/s 397.02348π730cos =⋅=︒=E G v v m/s (→) 397.0==G F v v m/s (←)6-13 平面机构如图所示。
已知:OA = AB = 20 cm ,半径r = 5 cm 的圆轮可沿铅垂面作纯滚动。
在图示位置时,OA 水平,其角速度 = 2 rad/s 、角加速度为零,杆AB 处于铅垂。
试求该瞬时:(1)圆轮的角速度和角加速度; (2)杆AB 的角加速度。
AOA v OBA OA v O BCv Av BP习题6-10图习题6-10解图OAB习题6-12图习题6-12解图 F解:(1) 圆轮的角速度和角加速度cm /s 40=⋅=ωOA v A杆AB 瞬时平移,AB = 0cm /s 40==A B v vrad/s 8==r vB B ω0n==BA B a a0==raB B α(2)杆AB 的角加速度。
0t=-BA A a a ,22t cm /s 80=⋅==ωOA a a A BA2trad/s 4==ABa BA ABα6-14 图示机构由直角形曲杆ABC ,等腰直角三角形板CEF ,直杆DE 等三个刚体和二个链杆铰接而成,DE 杆绕D 轴匀速转动,角速度为0ω,求图示瞬时(AB 水平,DE 铅垂)点A 的速度和三角板CEF 的角加速度。
解:(1)求点A 的速度0ωωa DE v E =⋅=三角板CEF 的速度瞬心在点F0ωa v v E C ==曲杆ABC 的速度瞬心在点O02ωa OA OCv v CA =⋅=(2)求三角板CEF 的角加速度n t n t FE FE E F F a a a a a ++=+将上式沿水平方向投影0t n ==FE F a a (因为v F = 0)0t==FEa FE CEF α6-15曲柄连杆机构在其连杆中点C 以铰链与CD 相连接,DE 杆可以绕E 点转动。
如曲柄的角速度rad/s 8=ω,且cm 25=OA ,cm 100=DE ,若当B 、E 两点在同一铅垂线上时,O 、A 、B 三点在同一水平线上,ο90=∠CDE ,求杆DE 的角速度和杆AB 的角加速度。
A OB习题6-13解图AOBv Av Ba Aa At BA a(a )(b )习题6—14解图v Av Cv Ea Ea En FE a t Fa nFa t FEa O(a)(b)(b)解:(1)求杆DE 的角速度cm /s 200=⋅=ωOA v A杆AB 的速度瞬心在点B cm/s 1002==AC v v 对杆CD 应用速度投影定理cm /s5030sin =︒=C D v vrad/s 5.0==DEvD DEω (2)求杆AB 的角加速度ntBA BA A B a a a a ++= 将上式沿铅垂方向投影t0BA a=, 0t ==ABa AB ABα6-16 试求在图示机构中,当曲柄OA 和摇杆O 1B 在铅垂位置时,B 点的速度和加速度(切向和法向)。
曲柄OA 以等角加速度0α= 5rad/s 2转动,并在此瞬时其角速度为0ω= 10rad/s ,OA = r = 200mm ,O 1B = 1000mm ,AB = l = 1200mm 。
解:1.v :0ωr v A =v B //v A ∴ 0=AB ω2102.00=⨯==ωr v B m/s (1) 2.a :ttntnBA A A B B a a a a a ++=+ 上式沿AB 方向投影得:θθθθcos sin cos sin tntnA AB B a a a a +=+即169.0169.0tan tan 12020n t n t ⋅-+⋅=-+=BO vr r a a a a BB A A B αωθθ70.352.0169.0)12102.0(22=⨯+⨯-⨯=m/s 2(169.04.12.02.02.12.0tan 22==-=θ)4122n==Ba m/s 2 B a :⎪⎩⎪⎨⎧==2t 2nm/s7.3m/s4B BB a a a (方向如图)6-17 图示四连杆机构中,长为r 的曲柄OA 以等角速度0ω转动,连杆AB 长l = 4r 。