机械振动基础第3章习题
第3章 多自由度机械振动系统 作业答案
⎤ ⎡ x1 ⎤ ⎡ p1 ( t ) ⎤ ⎢x ⎥ = ⎢ p t ⎥ − k3 ⎥ ⎥ ⎢ 2 ⎥ ⎢ 2 ( )⎥ k3 + k 4 ⎥ ⎦⎢ ⎣ x3 ⎥ ⎦ ⎢ ⎣ p3 ( t ) ⎥ ⎦ 0
d ∂T ∂T ∂U ∂D ( )− + + = Qi i ∂qi ∂qi ∂q i dt ∂q
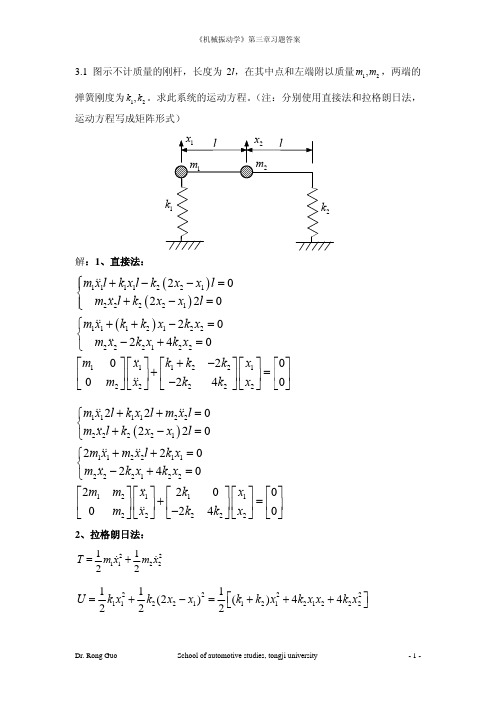
2、拉格朗日法:
1 1 2 12 + m2 x 2 T = m1 x 2 2
U=
1 2 1 1 2 ⎤ k1 x1 + k2 (2 x2 − x1 ) 2 = ⎡ (k1 + k2 ) x12 + 4k2 x1 x2 + 4k2 x2 ⎣ ⎦ 2 2 2
Dr. Rong Guo
School of automotive studies, tongji university
⎡ k1r 2 K =⎢ 2 ⎣ − k1r
⎡3 2 ⎢ 2 Mr ⎢ ⎢ 0 ⎢ ⎣ 0
⎤ ⎥ ( k1 + k2 ) r 2 ⎦ − k1r 2
− k1r 2 ⎤ ⎡θ1 ⎤ ⎡0 ⎤ ⎥⎢ ⎥ = ⎢ ⎥ θ 2 ⎦ ⎣0 ⎦ ( k1 + k2 ) r 2 ⎦ ⎣
⎤ ⎤ ⎡ k1r 2 ⎥ ⎡θ ⎥ ⎢ 1 ⎥ + ⎢ 3 −k r 2 θ Mr 2 ⎥ ⎣ 2 ⎦ ⎣ 1 ⎥ ⎦ 2
x1 2l + k1 x1 2l + m2 x2l = 0 ⎧m1 ⎨ ⎩m2 x2l + k2 ( 2 x2 − x1 ) 2l = 0 x1 + m2 x2l + 2k1 x1 = 0 ⎧2m1 ⎨ x2 − 2k2 x1 + 4k2 x2 = 0 ⎩ m2 ⎡ 2m1 ⎢ 0 ⎣ m2 ⎤ ⎡ x1 ⎤ ⎡ 2k1 ⎢ ⎥ + ⎢ −2 k m2 ⎥ x 2 ⎦⎣ 2⎦ ⎣ 0 ⎤ ⎡ x1 ⎤ ⎡0 ⎤ ⎢ x ⎥ = ⎢0 ⎥ 4k 2 ⎥ ⎦⎣ 2⎦ ⎣ ⎦
机械振动基础课后习题解答_第3章习题
m
0
0 m
u1 u2
3k k
k 3k
u1 u2
2ku0
sin 0
t
K
2M
3k
2m
k
k
3k 2m
H11 ( )
3k 2m ()
H 21 ( )
k ()
u1(t) u2 (t)
H11 ( ) H21()
2ku0
sin
t
3k 为反共振频率 m
P140,3-9: 图示系统初始静止,求左端基础产生阶跃位移u0后系统的响应。
ml2 1 0 M 3 0 7 /16
K
l2k 16
9 9
9
13
| K 2M | 0
1 0.65
k m
2 2.62
k m
P139,3-3: 建立图示系统的运动微分方程,并求当ki k,i 1, 6, m1 m, m2 2m, m3 m时的固有 频率和固有振型。
m1
M
m2
u2
c
3c
2c
u2
k
3k
2k
u2
0
m u3 0 2c 2c u3 0 2k 2k u3 f0
1 0,2
k m
, 3
2k m
1 1 1
φ1
1 , φ2
0
, φ3
1
1
1/ 2
1
u1 1
u2
1
u3 1
1 0 1/ 2
1 q1
1
q2
1 q3
)d
u0 2
(1 cos1t)
q2
(t)
u0 2
(1
cos 2t )
机械振动答案
机械振动答案(1)选择题1解析:选D.如图所示,设质点在A 、B 之间振动,O 点是它的平衡位置,并设向右为正.在质点由O 向A 运动过程中其位移为负值;而质点向左运动,速度也为负值.质点在通过平衡位置时,位移为零,回复力为零,加速度为零,但速度最大.振子通过平衡位置时,速度方向可正可负,由F =-kx 知,x 相同时F 相同,再由F =ma 知,a 相同,但振子在该点的速度方向可能向左也可能向右.2.解析:选B.据简谐运动的特点可知,振动的物体在平衡位置时速度最大,振动物体的位移为零,此时对应题图中的t 2时刻,B 对.3.解析:选BD.质点做简谐运动时加速度方向与回复力方向相同,与位移方向相反,总是指向平衡位置;位移增加时速度与位移方向相同,位移减小时速度与位移方向相反.4解析:选C.因为弹簧振子固有周期和频率与振幅大小无关,只由系统本身决定,所以f 1∶f 2=1∶1,选C.5解析:选B.对于阻尼振动来说,机械能不断转化为内能,但总能量是守恒的.6.解析:选B.因质点通过A 、B 两点时速度相同,说明A 、B 两点关于平衡位置对称,由时间的对称性可知,质点由B 到最大位移,与由A 到最大位移时间相等;即t 1=0.5 s ,则T2=t AB +2t 1=2 s ,即T =4 s ,由过程的对称性可知:质点在这2 s 内通过的路程恰为2 A ,即2A =12 cm ,A =6 cm ,故B 正确.7.解析:选A.两球释放后到槽最低点前的运动为简谐运动且为单摆模型.其周期T =2πR g,两球周期相同,从释放到最低点O 的时间t =T4相同,所以相遇在O 点,选项A 正确.8.解析:选C.从t =0时经过t =3π2L g 时间,这段时间为34T ,经过34T 摆球具有最大速度,说明此时摆球在平衡位置,在给出的四个图象中,经过34T 具有负向最大速度的只有C 图,选项C 正确.9.解析:选CD.单摆做简谐运动的周期T =2πlg,与摆球的质量无关,因此两单摆周期相同.碰后经过12T 都将回到最低点再次发生碰撞,下一次碰撞一定发生在平衡位置,不可能在平衡位置左侧或右侧.故C 、D 正确.10.解析:选D.通过调整发生器发出的声波就能使酒杯碎掉,是利用共振的原理,因此操作人员一定是将声波发生器发出的声波频率调到500 Hz ,故D 选项正确. 二、填空题(本题共2小题,每小题8分,共16分.把答案填在题中横线上)11答案:(1)B (2)摆长的测量、漏斗重心的变化、液体痕迹偏粗、阻力变化……12答案:(1)ABC (2)①98.50 ②B ③4π2k计算题13.(10分)解析:由题意知弹簧振子的周期T =0.5 s ,振幅A =4×10-2m. (1)a max =kx max m =kA m=40 m/s 2. (2)3 s 为6个周期,所以总路程为s =6×4×4×10-2m =0.96 m.答案:(1)40 m/s 2(2)0.96 m14.(10分)解析:设单摆的摆长为L ,地球的质量为M ,则据万有引力定律可得地面的重力加速度和高山上的重力加速度分别为:g =G M R 2,g h =G M R +h2据单摆的周期公式可知T 0=2πLg ,T =2πL g h由以上各式可求得h =(T T 0-1)R . 答案:(T T 0-1)R15.(12分解析:球A 运动的周期T A =2πl g, 球B 运动的周期T B =2π l /4g =πl g. 则该振动系统的周期T =12T A +12T B =12(T A +T B )=3π2l g. 在每个周期T 内两球会发生两次碰撞,球A 从最大位移处由静止开始释放后,经6T =9πlg,发生12次碰 撞,且第12次碰撞后A 球又回到最大位置处所用时间为t ′=T A /4. 所以从释放A 到发生第12次碰撞所用时间为t =6T -t ′=9πl g -2T 2l g =17π2lg. 答案:17π2l g16.(12分解析:在力F 作用下,玻璃板向上加速,图示OC 间曲线所反映出的是振动的音叉振动位移随时间变化的规律,其中直线OC 代表音叉振动1.5个周期内玻璃板运动的位移,而OA 、AB 、BC 间对应的时间均为0.5个周期,即t =T 2=12f=0.1 s .故可利用匀加速直线运动的规律——连续相等时间内的位移差等于恒量来求加速度.设板竖直向上的加速度为a ,则有:s BA -s AO =aT 2①s CB -s BA =aT 2,其中T =152 s =0.1 s ②由牛顿第二定律得F -mg =ma ③ 解①②③可求得F =24 N. 答案:24 N机械振动(2)机械振动(3)1【解析】 如图所示,图线中a 、b 两处,物体处于同一位置,位移为负值,加速度一定相同,但速度方向分别为负、正,A 错误,C 正确.物体的位移增大时,动能减少,势能增加,D 错误.单摆摆球在最低点时,处于平衡位置,回复力为零,但合外力不为零,B 错误.【答案】 C2【解析】 质量是惯性大小的量度,脱水桶转动过程中质量近似不变,惯性不变,脱水桶的转动频率与转速成正比,随着转动变慢,脱水桶的转动频率减小,因此,t 时刻的转动频率不是最大的,在t 时刻脱水桶的转动频率与机身的固有频率相等发生共振,故C 项正确.【答案】 C3【解析】 摆球从A 运动到B 的过程中绳拉力不为零,时间也不为零,故冲量不为零,所以选项A 错;由动能定理知选项B 对;摆球运动到B 时重力的瞬时功率是mg v cos90°=0,所以选项C 错;摆球从A 运动到B 的过程中,用时T /4,所以重力的平均功率为P =m v 2/2T /4=2m v 2T ,所以选项D 错.【答案】 B4【解析】 由振动图象可看出,在(T 2-Δt )和(T2+Δt )两时刻,振子的速度相同,加速度大小相等方向相反,相对平衡位置的位移大小相等方向相反,振动的能量相同,正确选项是D.【答案】 D5【解析】 据受迫振动发生共振的条件可知甲的振幅较大,因为甲的固有频率接近驱动力的频率.做受迫振动物体的频率等于驱动力的频率,所以B 选项正确.【答案】 B6【解析】 由题意知,在细线未断之前两个弹簧所受到的弹力是相等的,所以当细线断开后,甲、乙两个物体做简谐运动时的振幅是相等的,A 、B 错;两物体在平衡位置时的速度最大,此时的动能等于弹簧刚释放时的弹性势能,所以甲、乙两个物体的最大动能是相等的,则质量大的速度小,所以C 正确,D 错误.【答案】 C题号 1 2 3 4 5 6 7 8 9 10答案 ACBADACBDACADD(T 2-T 1)R/T 17【答案】 C8【解析】 根据题意,由能量守恒可知12kx 2=mg (h +x ),其中k 为弹簧劲度系数,h 为物块下落处距O 点的高度,x 为弹簧压缩量.当x =x 0时,物块速度为0,则kx 0-mg =ma ,a =kx 0-mg m =kx 0m -g =2mg (h +x 0)mx 0-g =2g (h +x 0)x 0-g >g ,故正确答案为D.【答案】 D9【解析】 由题中条件可得单摆的周期为T =0.30.2s =1.5s ,由周期公式T =2πlg可得l=0.56m.【答案】 A10【解析】 当摆球释放后,动能增大,势能减小,当运动至B 点时动能最大,势能最小,然后继续摆动,动能减小,势能增大,到达C 点后动能为零,势能最大,整个过程中摆球只有重力做功,摆球的机械能守恒,综上可知只有D 项正确.【答案】 D机械振动(4)1解析:选A.周期与振幅无关,故A 正确.2解析:选C.由单摆周期公式T =2π lg知周期只与l 、g 有关,与m 和v 无关,周期不变频率不变.又因为没改变质量前,设单摆最低点与最高点高度差为h ,最低点速度为v ,mgh =12m v 2.质量改变后:4mgh ′=12·4m ·(v 2)2,可知h ′≠h ,振幅改变.故选C.3解析:选D.此摆为复合摆,周期等于摆长为L 的半个周期与摆长为L2的半个周期之和,故D 正确.4解析:选B.由简谐运动的对称性可知,t Ob =0.1 s ,t bc =0.1 s ,故T4=0.2 s ,解得T =0.8s ,f =1T=1.25 Hz ,选项B 正确.5解析:选D.当单摆A 振动起来后,单摆B 、C 做受迫振动,做受迫振动的物体的周期(或频率)等于驱动力的周期(或频率),选项A 错误而D 正确;当物体的固有频率等于驱动力的频率时,发生共振现象,选项C 正确而B 错误.6解析:选BD.速度越来越大,说明振子正在向平衡位置运动,位移变小,A 错B 对;速度与位移反向,C 错D 对.7解析:选AD.P 、N 两点表示摆球的位移大小相等,所以重力势能相等,A 对;P 点的速度大,所以动能大,故B 、C 错D 对.8解析:选BD.受迫振动的频率总等于驱动力的频率,D 正确;驱动力频率越接近固有频率,受迫振动的振幅越大,B 正确.9解析:选B.读图可知,该简谐运动的周期为4 s ,频率为0.25 Hz ,在10 s 内质点经过的路程是2.5×4A =20 cm.第4 s 末的速度最大.在t =1 s 和t =3 s 两时刻,质点位移大小相等、方向相反.。
第3章 振动系统的运动微分方程题解
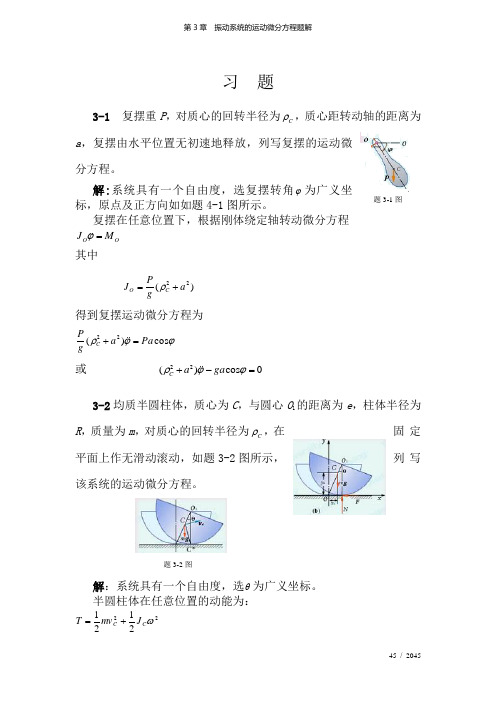
45 / 2045习 题3-1 复摆重P ,对质心的回转半径为C ρ,质心距转动轴的距离为a ,复摆由水平位置无初速地释放,列写复摆的运动微分方程。
解:系统具有一个自由度,选复摆转角ϕ为广义坐标,原点及正方向如如题4-1图所示。
复摆在任意位置下,根据刚体绕定轴转动微分方程O O M J =ϕ其中)(22a gP J C O +=ρ 得到复摆运动微分方程为ϕϕρcos )(22Pa a gP C =+ 或0cos )(22=-+ϕϕρga a C3-2均质半圆柱体,质心为C ,与圆心O 1的距离为e ,柱体半径为固定R ,质量为m ,对质心的回转半径为C ρ,在平面上作无滑动滚动,如题3-2图所示,列写该系统的运动微分方程。
解:系统具有一个自由度,选θ为广义坐标。
半圆柱体在任意位置的动能为:222121ωC C J mv T +=题3-1图题3-2图46 / 2046用瞬心法求C v :2222*2)cos 2()(θθθ Re R e CC v C -+== θω = 2CC m J ρ= 故2222221)cos 2(21θρθθ Cm Re R e m T +-+=系统具有理想约束,重力的元功为 θθδd mge W sin -=应用动能定理的微分形式W dT δ=θθθρθθd mge m Re R e m d C sin 21)cos 2(2122222-=⎥⎦⎤⎢⎣⎡+-+ θθθθθθθθθθρd mge d mRe d mRe d R e m C sin sin cos 2)(2222-=+-++ 等式两边同除dt ,θθθθθθθθθθρ sin sin cos 2)(2222mge mRe mRe R e m C -=+-++ 0≠θ ,等式两边同除θ故微分方程为0sin sin )cos 2(2222=+++-+θθθθρθmge mRe Re R e m C ① 若为小摆动θθ≈sin ,1cos ≈θ,并略去二阶以上微量,上述非线性微分方程可线性化,系统微摆动的微分方程为0])[(22=++-θθρge r R C要点及讨论(1)本题也可以用平面运动微分方程求解。
机械振动习题集
第一章 概论1-1概念1. 机械振动系统由哪几部分组成?其典型元件有哪些?2. 机械振动研究哪三类基本问题?3. 对机械振动进行分析的一般步骤是什么?4. 在振动分析中,什么叫力学模型,什么叫数学模型?5. 惯性元件、弹性元件、阻尼元件的基本特性各是什么?6. 什么叫离散元件或集中参数元件?7. 什么叫连续体或分布参数元件?8. 建立机械振动系统力学模型的基本原则有哪些?9.建立机械振动系统力学模型需要考虑的基本问题?并分析建立下图中的系统的力学模型。
一台机器(看为一个整体)平置于一块板上,板通过两个垂直的支撑块放置在地面上,试建立其力学模型。
10. 如果一个振动系统是线性的,它必须满足什么条件?11. 如果一个振动系统的运动微分方程是常系数的,它必须满足什么条件? 12. 试讨论:若从车内乘客的舒适度考虑,该如何建立小轿车的振动模型?1-2简谐运动及其运算1求下列简谐函数的单边复振幅和双边复振幅 (1))3sin(2πω+=t x (2))410cos(4ππ+=t x (3))452cos(3︒+=t x π答案:(1)111,,2222S B B X j X j X j +-==-=+ (2),,S B B X X X +-== (3),,224444S B B X j X j X j +-=+=+=-2通过简谐函数的复数表示,求下列简谐函数之和,并用“振动计算实用工具”对(2)(3)进行校核(1))3sin(21πω+=t x )32s i n (32πω+=t x (2)t x π10sin 51=)410cos(42ππ+=t x(3))302sin(41︒+=t x π )602sin(52︒+=t x π)452cos(33︒+=t x π)382cos(74︒+=t x π )722cos(25︒+=t x π答案:(1))6.6cos(359.412︒+=t x ω (2))52.4710cos(566.312︒-=t x π (3))22.92cos(776.1412345︒+=t x π3试计算题1中)(t x 的一阶导数和二阶导数对应的复振幅,并给出它们的时间历程4设)(t x 、)(t f 为同频简谐函数,并且满足)(t f cx x b x a =++ 。
第三章 机械振动与机械波自我测试题
第三章 机械振动与机械波自我测试题一、选择题1、谐振动是一种什么样的运动?A 匀加速运动;B 匀减速运动;C 匀速运动;D 变加速运动。
2、下列振动中,哪个不是谐振动?A 弹簧振子的振动;B 当摆角不大(<50)时的单摆的振动;C 位移方程满足x=sin(ωt+φ)的振动;D 拍皮球时皮球的振动。
3、一质点作上下方向的谐振动,设向上为正方向。
当质点在平衡位置开始向上振动,则初位相为:A 0;B 2π;C 2π-;D 3π 4、当一物体系在一弹簧上作振动,振幅为A ,无阻尼,则:A 当位移是±A ,它的动能最大;B 在运动过程中它的总机械能有改变;C 在任一时刻其势能不变;D 当位移为零时它的势能为最小。
5、有一质量为4kg 的物体,连在一弹簧上,在垂直方向作简谐振动,振幅是1米。
当物体上升到最高点时为自然长度。
那么物体在最高点时的弹性势能、动能、重力势能之和为:(设弹簧伸到最长时重力势能为零,并取g= l0m/s 2)A 60J ;B 40J ;C 20J ;D 80J 。
6、某质点参与x 1=l0cos(πt -π/2)cm 及x 2=20cos(πt+π/2)cm 两个同方向的谐振动,则合成振动的振幅为:A 20cm ;B l0cm ;C 30cm ;D lcm 。
7、设某列波的波动方程为y=l0sin(10πt -x/100)cm ,在波线上x 等于一个波长处的点的位移方程为:A y= 10sin(10πt - 2π);B y= l0sin10πt ;C y= 20sin5πt ;D y= l0cos(l0πt - 2π).8、已知波动方程为y=0.05sin(l 0πt-πx )cm ,时间单位为秒,当t=T/4时,波源振动速度V 应为:A V= 0.5π;B V=-0.5π2;C V= 0.5πcos10πt ;D V= 0。
9、已知一个lkg 的物体作周期为0.5s 的谐振动,它的能量为2π2J ,则其振幅为:A 2m ;B 0.5m ;C 0.25m ;D 0.2m 。
机械振动学(第三章)-多自由度振动系统

装备制造学院
College of Equipment Manufacture
利用直接法,对下图所示的三自由度振动系统建立微分方程。。
装备制造学院
College of Equipment Manufacture
解:1)受力分析 选取 m1, m2和m3离开平衡位置的坐标x1, x2和 x3 为3 个独立 坐标。受力分析如图所示 2)建立振动微分方程 (c c ) x c x ( k k ) x k x p (t ) x m1: m 2 2 2 2 2 ( c 2 c 3 ) x 2 c2 x 1 c 3 x 3 ( k 2 k 3 ) x 2 k 2 x1 k 3 x 3 p 2 ( t ) x m2: m 2 2 2 2 3 c 3 x 3 c3 x 2 k 3 x3 k 3 x 2 p 3 (t ) x m3: m 3
装备制造学院
College of Equipment Manufacture
本章结束
装备制造学院 College of Equipment Manufacture
3 )如果将应为能量耗散函数 D 引起的阻尼力也从其他的非势 力的广义力中分离出来,并使Qi仅代表外部作用的广义激振力, 则可将非保守系统的拉格朗日方程改为:
d dt ( T i q ) T i q U qi D i q Q i ( i 1, 2 , 3 ,...., n )
车 身 车 轮 二 自 由 度 振 动 问 题
装备制造学院
College of Equipment Manufacture
装备制造学院
College of Equipment Manufacture
机械振动课后习题集和规范标准答案第三章习题集和标准答案
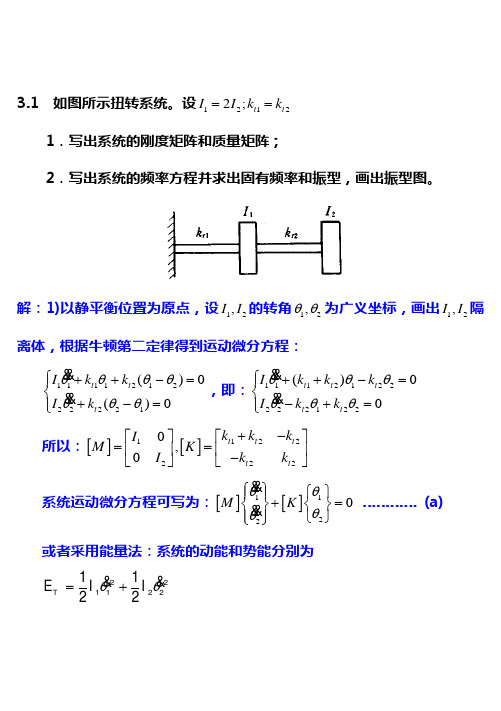
3.1 如图所示扭转系统。
设12122;t t I I k k ==1.写出系统的刚度矩阵和质量矩阵;2.写出系统的频率方程并求出固有频率和振型,画出振型图。
解:1)以静平衡位置为原点,设12,I I 的转角12,θθ为广义坐标,画出12,I I 隔离体,根据牛顿第二定律得到运动微分方程:111121222221()0()0t t t I k k I k θθθθθθθ⎧++-=⎪⎨+-=⎪⎩&&&&,即:1112122222122()00t t t t t I k k k I k k θθθθθθ⎧++-=⎪⎨-+=⎪⎩&&&&所以:[][]12212220,0t t t t t k k k IM K k k I +-⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦系统运动微分方程可写为:[][]11220M K θθθθ⎧⎫⎧⎫⎪⎪+=⎨⎬⎨⎬⎪⎪⎩⎭⎩⎭&&&& ………… (a)或者采用能量法:系统的动能和势能分别为θθ=+&&2211221122T E I Iθθθθθθθ=+-=++-222211212121221121111()()2222t t t t t t U k k k k k k 求偏导也可以得到[][],M K由于12122;t t I I k k ==,所以[][]212021,0111t M I K k -⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦2)设系统固有振动的解为: 1122cos u t u θωθ⎧⎫⎧⎫=⎨⎬⎨⎬⎩⎭⎩⎭,代入(a )可得:[][]122()0u K M u ω⎧⎫-=⎨⎬⎩⎭………… (b)得到频率方程:22121211222()0t t t t k I k k k I ωωω--==--V即:224222121()240t t I k I k ωωω=-+=V解得:211,222(22t k I ω±==所以:1ω=<2ω= ………… (c)将(c )代入(b )可得:112121211122(22220(22t t t t t t k k I k I u u k k k I I ⎡⎤±--⎢⎥⎧⎫⎢⎥=⎨⎬⎢⎥⎩⎭⎢⎥--⎢⎥⎣⎦g g g解得:11212u u =-;12222u u = 令21u =,得到系统的振型为:-0.70710.70713.2 求图所示系统的固有频率和振型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
d 11
d 21 d 31
1
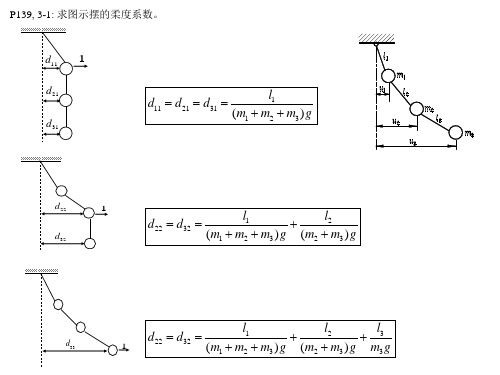
d11 = d 21 = d31 =
l1 (m1 + m2 + m3 ) g
d 22
1
d 22 = d32 =
d 32
l1 l2 + (m1 + m2 + m3 ) g (m2 + m3 ) g
d 33
1
d 22 = d32 =
l l1 l2 + + 3 (m1 + m2 + m3 ) g (m2 + m3 ) g m3 g
m1l 2 3 M = 0
0 2 7 m2l 48
9l 2 k1 16 K = 9l 2 k1 16
l 2k K= 16
9l 2 k1 16 2 2 9l k1 l k2 + 16 4
ml 2 M= 3
0 1 0 7 /16
9 9 9 13
r
n
r
Φ CΦ = diag[Mi ] ∑αr diag[ωi2 ] 1≤i≤N r =0 1≤i≤N
T
n
r
= Φ diag[Mi ] ∑αr diag[ωi2 ] Φ1 1≤i≤N r =0 1≤i≤N
T
n
r
对角矩阵
P140,3-12 : 考察无刚体运动自由度的比例阻尼系统,证明计算其响应的模态加速度法为 u(t ) = K f (t ) ∑
m 0 u1 3k 0 m u + k 2 k u1 2ku0 = 3k u2 0
2k 4k ω1 = , ω2 = m m
u1 1 1 q1 u = 1 1 q 2 2
1 1 φ1 = , φ2 = 1 1
1 1 m 0 1 1 q1 1 1 3k 1 1 0 m 1 1 q + 1 1 k 2
=0
系统的固有频率: ω1 = 0
ω2 = ω3 =
k m
ω4 =
( M + 3m)k mM
2 容易确定ω12和ω4的特征矢量:
1 1 φ1 = 1 1
3m M 1 φ4 = 1 1
对于ω2 = ω3 =
k , 有 m
1 1 1 0 0 0 φi = 0,(i = 2,3) 0 0 0 0 0 0
m2
k1 + k2 K = k2 0
m M = 2m m
ω1 =
k m
ω2 =
2k m
ω3 =
3k m
1 φ1 = 1 1
1 φ2 = 0 1
1 φ2 = 1 1
P140,3-4: 图示带集中质量的自由梁是飞机的最简单的模型,梁的抗弯刚度EI , 质量不计, 集中质量的比值为 = m / M. 求系统的固有频率和固有振型.
ω2 = ω3 =
3EI = ml 3EI Ml
3EI (2m + M ) 3EI (2 + 1) = Mml Ml
1 φ2 = 0 1 1 φ3 = 2 1
1 φ1 = 1 1
P140,3-5: 图示系统中各质量只能沿ui,i = 1, 4方向运动, 试分析其固有模态.
0 u1 k m u1 c c u + c 3c 2c u + k 3m 2 2 m u3 0 2c 2c u3 0 k 3k 2k 0 u1 0 2k u2 = 0 2k u3 f 0
k 2k ω1 = 0, ω2 = , ω3 = m m
模态坐标系下的运动方程:
1 1 1 φ1 = 1 , φ2 = 0 , φ3 = 1 1 1/ 2 1
1 1 q1 u1 1 u = 1 0 1 q2 2 u3 1 1/ 2 1 q3
P139,3-2: 求图示系统的的刚度矩阵和柔度矩阵, 并求m1 = m2 = m, k1 = k2 = k时系统的固有频率.
1 m1l 2 l 2 2 1 m2l 2 l T= ( + m1 ( ) )θ1 + ( + m2 ( ) 2 )θ 2 2 2 12 2 2 12 4
U=
1 3l 3l 1 l k1 ( θ1 θ 2 ) 2 + k2 ( θ 2 ) 2 2 4 4 2 2
q1 (0) q1 (0) 0 q (0) = q (0) = 0 2 2 q3 (0) q3 (0) 0
0 0 q1 0 0 0 q1 1 6m q1 0 q + 0 3c / 2 0 q + 0 3k / 2 0 q = 1/ 2 f 3m / 2 2 2 2 0 6m q3 0 0 12c q3 0 0 12k q3 1
13 = 0 23 + 33 + 43 = 0
正交条件:φ3T M φ2 = 0
223 +33 +43 = 0
0 0 φ3 = 1 1
1 1 φ1 = 1 1
0 2 φ2 = 1 1
0 0 φ3 = 1 1
3m M φ4 = 1 1 1
q1 (t ) = f0 2 t 12m
t 0
q2 (t ) = ∫
f 0 1 ζ 2ω2 (t τ ) e sin ωd 2 (t τ )dτ 3m ωd 2
f0 e ζ 2ω2 t = 1 cos(ωd 2t 2 ) 2 3k 1 ζ 2
ωd 2
ζ c 1 2 = 1 ζ ω2 , ζ 2 = , 2 = tan 1 ζ 2 2mω2 2
r r
n
Kφr = ω r2 M φr , ( r = 1... N )
M 1 Kφr = ωr2 φr , (r = 1...N )
M 1 KΦ = Φ diag[ωi2 ]
1≤i ≤ N
其中:Φ = [φ1 φN ]
M 1 K = Φ diag[ωi2 ]ห้องสมุดไป่ตู้ 1
1≤i ≤ N
代入
C = M ∑αr ( M K ) = M ∑αr (Φ diag[ωi2 ]Φ1 )r
m 0 u1 3k 0 m u + k 2
2
k u1 2ku0 sin ωt = 3k u2 0 3k ω 2 m k
3k ω 2 m K ω M = k
3k 3k ω 2 m H11 (ω ) = (ω )
H 21 (ω ) =
r =1 r =1
n
n
n
1
f ( t ) K M ∑ φ r q r ( t ) K 1C ∑ φ r q r ( t )
1 r =1 r =1
1 r T
n
K
M
∑ φ q ( t ) = Φ diag[ K
r =1 r r 1≤ r ≤ N 1≤ r ≤ N
]Φ M
∑ φ q (t )
1 r =1 n
2ζ r
ωr
φr qr (t ) ∑
n
1
2 r =1 ωr
φr qr (t )
证明: Mu(t ) + Cu(t ) + Ku(t ) = f (t )
u(t ) = K f (t ) K Mu(t ) K Cu(t )
u (t ) = K
1 n
1
1
1
模态截断:u(t ) = ∑ φr qr (t ), u(t ) = ∑ φr qr (t )
P140,3-7: 图示系统左端基础作简谐激励u0 (t ) = u0 sin ωt , 试求两集中质量的稳态位移响应并讨论其 反共振现象.
mu1 (t ) = k (u1 (t ) u2 (t )) 2k (u1 (t ) u0 (t )) mu2 (t ) = 2ku2 (t ) k (u2 (t ) u1 (t ))
T T
k 1 1 q1 1 1 2ku0 = 3k 1 1 q2 1 1 0
T
1 0 q1 ω12 0 q1 ku0 / m = 0 1 q + 2 2 0 ω2 q2 ku0 / m
q1 (t ) = ∫ ku0 1 u sin ω1 (t τ )dτ = 0 (1 cos ω1t ) 0 m ω 2 1
M 3 m k ( K M )φi = k 1 m 1 1
任取32 = 42 = 1
1i = 0 2i +3i + 4i = 0 (i = 2,3)
正交条件:φiT M φ1 = φiT M φ4 = 0,(i = 2,3)
2i +3i +4i = 0, (i = 2,3)
0 2 φ2 = 1 1
系统的动能:T = 系统的势能:U =
m M M = m
1 1 1 2 2 mu12 + Mu2 + mu3 2 2 2 1 3EI 1 3EI (u3 u2 ) 2 + (u1 u2 ) 2 2 l 2 l
1 1 0 3EI K= 1 2 1 l 0 1 1
ω1 = 0
k (ω )
u1 (t ) H11 (ω ) u (t ) = H (ω ) 2ku0 sin ωt 2 21
ω=
3k 为反共振频率 m
P140,3-9: 图示系统初始静止,求左端基础产生阶跃位移u0后系统的响应.
mu1 (t ) = k (u1 (t ) u2 (t )) 2k (u1 (t ) u0 (t )) mu2 (t ) = 2ku2 (t ) k (u2 (t ) u1 (t ))
r =1 r r
n
= Φ diag[ K r 1 ][ M 1 q1 ( t ) M n q n ( t ) 0 0]T = Φ [ q1 ( t ) / ω q n ( t ) / ω
| K ω 2 M |= 0