船舶操纵知识点196
船舶操纵知识点

船舶操纵知识点船舶作为一种重要的交通工具,被广泛应用于海洋、河流等水域。
而在操纵船舶的过程中,船长和船员需要掌握一定的船舶操纵知识点,以确保船舶的安全运行。
本文将针对船舶操纵所需要了解的一些知识点进行探讨。
1. 舵角和操舵方式舵角是指船舶船轮转动的角度,通过舵角的调整,船长可以控制船的航向。
船舶可以通过手动操纵舵轮或使用自动操纵装置来调整舵角。
手动操纵舵轮通常需要两名船员协调,其中一名船员负责转动舵轮,另一名船员负责监督舵角的变化。
自动操纵装置则可以根据预设的航线和参数自动调整舵角,减轻船员的工作负担。
2. 舵手须知舵手是操纵船舶的重要角色之一。
舵手需要具备以下技能和知识点:a. 熟练掌握船舶结构和舵机操纵原理。
b. 熟悉船舶航行规则和航行标志。
c. 熟悉船舶吃水和排水情况,以及与潮汐等相关的水文地理知识。
d. 熟悉船舶不同航速状态下的不同舵角调整方式和技巧。
e. 熟悉船舶遇到紧急情况时的应急处置方式。
3. 转向和掉头船舶在航行中需要进行转向和掉头操作,以避免遇到障碍物或改变船的航向。
在进行转向和掉头时,船长需要考虑以下几点:a. 船舶的航速和航向。
b. 船舶的吃水和排水情况。
c. 船舶当前的舵角和转向方式。
转向方式分为渐变转向和急转弯两种。
渐变转向可以分为外侧弯和内侧弯,分别对应着船舶正常航行时左转和右转的状态。
急转弯则是在一定时间内使船舶快速改变航向。
4. 驾驶技巧和注意点a. 航行时需随时留意船舶周围环境,注意观察水流、风速、潮汐等因素的变化。
b. 船舶在不同航速状态下的操作方式和技巧不同,需注意切换。
c. 若发生船舶故障或天气突变等紧急情况,需及时采取应急处置措施。
d. 舵轮操作时需小心谨慎,避免过度调整舵角引发不必要的风险。
e. 在船舶停泊和起锚时,需注意船舶与岸边或其他船只的距离和方向,操作时需谨慎。
总结船舶操纵技巧和知识点涉及诸多方面,通过不断学习和实践,船长和船员可以掌握有效的操作技巧,确保船舶的安全运行。
第二章 船舶操纵基本知识
第二章船舶操作基本知识船舶操纵是指船舶驾驶人员根据船舶操纵性能和客观环境因素,正确地控制船舶以保持或改变船舶的运动状态,以达到船舶运行安全的目的。
船舶操纵是通过车、舵并借助锚、缆和拖船来实现的。
要完成操纵任务,除保证所有操纵设备处于正常良好的技术状态外,操纵人员必须掌握船舶操纵性能(惯性和旋回性等)及对客观环境(风、流、水域的范围等)的正确估计。
第一节车的作用推动船舶向前运动的工具叫船舶推进器,推进器的种类很多,目前常见的有明轮、喷水器推进器螺旋桨、平旋推进器、侧推器等。
因为螺旋桨结构简单、性能可靠且推进效率高,所以被广泛应用于海上运输船舶。
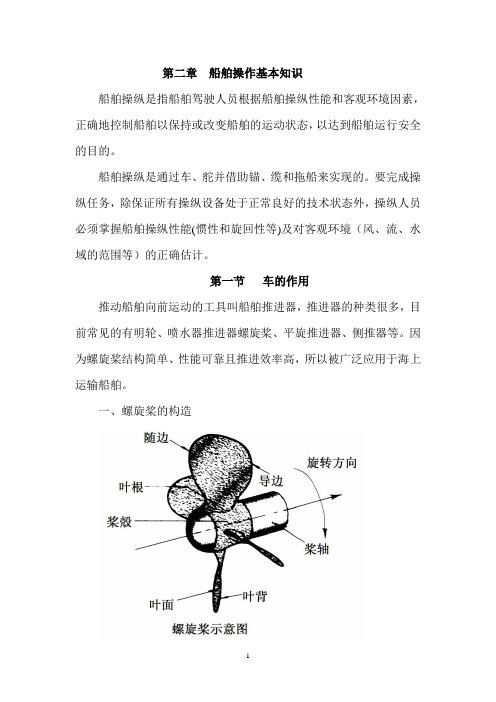
一、螺旋桨的构造1、螺旋桨的材料和组成螺旋桨常用铸锰黄铜、青铜和不锈钢制作。
现在也有采用玻璃制作的。
螺旋桨有桨叶和浆毂两部分组成,连接尾轴上。
(1)桨叶,一般为三片和四片,个别也有五片甚至六片的,低速船采用宽叶,高速船采用窄叶。
(2)桨毂,多数浆毂与桨叶铸成一体。
浆毂中心又圆锥形空,用以套在尾轴后部。
(3)整流帽(4)尾轴2、螺旋桨的配置一般海船都采用单螺旋桨,叫单车船。
也有部分船舶(客船和军舰)采用双螺旋桨,叫双车船。
单桨船的螺旋桨通常是右旋转式的。
右旋是指船舶在前进时,从船尾向船首看,螺旋桨在顺车时沿顺时针方向转动的称为右旋,沿逆时针方向转动的称为左旋。
目前,大多数商船均采用右旋式。
双桨船的螺旋桨按其旋转方向可分为外旋式和内旋式两,对于双桨船,往舷外方向转动的称为外旋,反之称内旋。
通常采用外旋,以防止水上浮物卷入而卡住桨叶。
进车时,左舷螺旋桨左转,右舷螺旋桨右转,则称为外旋式;反之,称为内旋式。
二、推力、阻力和功率1、船舶推力在主机驱动下,螺旋桨正车旋转时推水向后运动,水对螺旋桨的反作用力在船首方向的分量就是推船前进的推力,倒车时则产生指向船尾的拉力。
流向螺旋桨盘面的水流称为吸入流(suction current);离开螺旋桨盘面的水流称为排出流(discharge current)。
船舶操纵

2.防抗台风的安全操作
1)方针:以防为主,防抗结合,适时早避,留有余 地. 2)台风预报:气象部门通过远程卫星扫描,近距 离雷达观测获得台风信息.船舶通过接收气象 传真,台风预报图获得台风运动等信息. 3)根据台风的位置和本船的动态决定避台方法.
海上避台与抗台
1)及时接收气象报告获得台风位置的准确信息,移动方向,移 动速度. 2)保持与台风的距离在200海里以上通过. 3)如船舶已经受到台风影响,正确判断船舶所处的位置.如在 北半球: (1)风向顺时针方向变化,则处在台风的右半园.若气压下降 则处于右前象限;若气压上升,则处于右后象限. (2)风向逆时针方向变化,则处在台风的左半园.若气压下降 则处于左前象限;若气压上升,则处于左后象限. (3)风向稳定少变,或虽有变动但忽而顺时转,忽而逆时针转, 风力渐大,气压下降,则处在台风的进路上;气压回升,风力 渐减,则处在后半园的路径上. 如在南半球,则与上述相反.
遭遇台风时的避离方法
1)北半球危险半园避离法 (1)采用与台风进路垂直的航向,即以船首右舷15-20度顶风,全速驶离台 风中心;随着风向顺时针的变化,相应地将航向逐渐向右变动,直至离开 危区. (2)若风浪十分猛烈或前方有浅滩或陆地阻挡,则可以采取船首右舷顶风 滞航方法;随着风向右转,不断向右调整航向,等待台风前移而避离台风 区. (3)若船舶虽处在危险半园内,但却离台风进路不远时,确信有足够的时间 和较快的速度,则可以从前面横越台风进路采取船尾右后斜顺浪航行 的方法,驶入可航半园予以避离. 2)北半球可航半园避离方法 (1)以船尾右舷受斜顺风,全速驶离;船尾受风舷角的大小,一般为15-30 度;同时航向应根据风的逆时针变化,而相应地向左改向. (2)若船前方有浅滩或陆地阻挡,可采取右首受风,顶风滞航. 3)北半球台风进路上的避离法:使船尾右舷受顺风,迅速驶入可航半园后, 依照可航半园内操纵方法进行. 4)南半球台风避离法与上述相反.
船舶操纵考点总结

船舶操纵考点总结第⼀章船舶操纵性能基本概念1.船舶操纵性能可分为固有操纵性和控制操纵性,固有操纵性:包括追随性、定长旋回性、航向稳定性;控制操纵性:包括改向性、旋回性、保向性。
2.转⼼:从瞬时轨迹曲率中⼼O 点作船舶⾸尾线的垂线可得瞬时转动中⼼P 点,简称“转⼼”。
船舶定常旋回时,⼀般转⼼位于船⾸之后约1/3 - 1/5 船长处;尾倾时,转⼼后移,⾸倾时,转⼼前移。
3.漂⾓:漂⾓是指船体上⼀点的船速⽮量与船舶⾸尾线之间的交⾓;漂⾓⼀般指船舶重⼼处的漂⾓,⽤符号β表⽰,左舷为负,右舷为负。
4.⽔动⼒及其⼒矩:⽔给予船舶的运动⽅向相反的⼒。
5.⽔动⼒作⽤中⼼:⽔动⼒作⽤中⼼是指船体⽔下部分的⾯积中⼼,随漂⾓β的增⼤⽽逐渐向后移动。
船舶平吃⽔时,当漂⾓为0,船舶向前直航时,⽔动⼒中⼼在船⾸之后约1/4 船长处,且船速越低,越靠近船中;当漂⾓为180o,即船舶后退时,⽔动⼒中⼼在距离船尾之前约1/4 船长处,且船退速越低,越靠近船中。
船舶空载或压载时往往尾倾较⼤,船体⽔下侧⾯积中⼼分布在船中之后,⽔动⼒作⽤中⼼要⽐满载平吃⽔时明显后移。
6.引航卡(Pilot Card):船长与引航员之间关于船舶操纵性能进⾏信息沟通的资料卡;每航次由船长填写;内容包括本船的主尺度、操纵装置性能、船在不同载况时主机不同转速下的航速以及船舶特殊操纵装置(侧推器)等信息。
7.驾驶台操纵性图(Wheelhouse Poster):详细概述船舶旋回性能和停船性能的图表资料;置于驾驶台显著位置;内容包括深⽔和浅⽔(=1.2),满载和压载情况下船舶的旋回圈轨迹图及制动性能(停船试验)资料。
8.船舶操纵⼿册(Maneuvering Booklet):详细描述船舶实船操纵性试验结果的⼿册;它是重要的船舶资料之⼀;内容包括旋回试验、Z形操纵试验和停船试验的试验条件、试验记录以及试验分析等;操纵⼿册包括全部驾驶台操纵性图上的全部信息;除实船试验结果之外,操纵⼿册中的⼤部分操纵信息估算结果。
船舶操纵重点

2、描述船舶旋回运动状态的运动要素
1) 漂角(drift angle)
船舶首尾线上某一点 的线速度与船舶首尾面的交 角叫做漂角,如左图所示。 船舶在首尾线上不同点的漂 角是不同的,在船尾处,由 于其横移速度最大,因此漂 角也最大。但通常所说的漂 角是指船舶重心处的线速度 Vt与船舶首尾面的交角,也 就是船首向与重心G点处旋回 圈切线方向的夹角,用B表示 之。一般船舶的漂角大约在 3°~15°之间。
第二节 船舶操纵方程及船舶操纵性指数
一、船舶操纵运动方程
Tŕ+r=Kδ
式中: K —— 旋回性指数(s-1); T —— 追随性指数(s); r —— 旋回角速度(1/s); ŕ —— 旋回角加速度(1/s2); δ —— 舵角(°)。
该方程最早是由日本学者野本谦作提出的,因此也称为野 本 方 程。 该式 中 , T 称之 为 船舶 的追 随 性指 数 (turning lag index),单位为s;K称之为船舶的旋回性指数(turning ability index)。
无因次化后的船舶操纵性指数K’、T’由于已经除去了船 舶尺度与船速的影响,故可直接用来比较不同船舶或同一船舶在 不同条件下的操纵性优劣及其变化趋势;反过来说,当两船的K、 T指数相等时,要使其操纵性能也相同,其船长和船速也应相同。
对于具备一般的操纵性能的船舶在满载状态下的K’、 T’应处于下列数值范围之内:
4) 旋回直径(final diameter) 旋回直径是指船舶作定常旋回时重心轨迹圆的直径, 亦称旋回终径,并以D表示之,它大约为旋回初径的0.9~ 1.2倍。 5) 滞距(reach) 亦称心距。正常旋回时,船舶旋回直径的中心O总较操 舵时船舶重心位置更偏于前方。滞距是该中心O的纵距,并 以Re代表之,大约为1~2倍船长,它表示操舵后到船舶进入 旋回的“滞后距离”,也是衡量船舶舵效的标准之一。
船舶操纵(内河船员考试)第二章知识要点
第二章系、离泊操纵第一节抛起锚操纵1.锚设备的作用有:停泊用锚、操纵用锚、应急用锚。
2.操纵用锚分:抛锚制动、控制船舶首向两种方法。
3.控制船舶速度和冲程时用锚的方法为:抛锚制动。
4.抛锚掉头、驶靠用锚、驶离用锚、抛锚倒车后退以稳定船首的方法都是控制船舶首向。
5.锚在操纵中可用于:控制余速、协助掉头、抛开锚利于离泊。
6.避免碰撞、触礁、搁浅,拖锚或拖链漂航、滞航,船舶搁浅后船体的固定及脱浅都属于应急用锚。
7.锚的抓力大小与:锚重、链长、底质、水深、抛锚方法有关。
8.锚的抓力大小决定于:锚型、锚重、锚杆的仰角、抛锚的方法;底质、水底地形、水深;与船舶的排水量和风、流、浪等外力的大小无关。
9.锚抓力为:锚的抓力系数与锚重的乘积。
链抓力为:锚链的抓力系数与平卧河底锚链重量的乘积。
10.锚型不同,锚的抓力系数不同。
按抓力系数的大小将不同锚型从小到大排列顺序为:霍尔锚——斯贝克锚——AC-14型大抓力锚。
11.当锚在河底被拖动2倍锚长时,锚爪开始抓土,锚的抓力将达最大值,一般为3~5倍锚重,这种姿势称为稳定抓底姿势。
12.锚在正常抓底状态下,抓力大;走锚状态下,抓力小。
13.当锚杆仰角为50时,抓力减小1/4,150时抓力减小1/2。
14.锚泊船的出链长度由两部分组成:悬垂链长和卧底链长。
15.锚泊力由锚抓力和链抓力两部分组成,其中链抓力等于卧底链长与河底的摩擦力。
16.悬垂链长不直接产生抓力,其作用是:使锚杆仰角为零,拉力呈水平方向,保证锚能充分发挥最大抓力,同时缓冲阵发性地作用在船体上的外力。
17.单锚泊时,锚链悬链长度:与锚重无关,与锚链单位长度重量有关。
18.单锚泊时,锚链卧底链长:与锚链单位长度重量有关,与船舶受到的外力有关。
19.单锚泊时,安全出链长度应:大于或等于悬链长度与卧底链长之和。
20.风速与锚泊船出链长度的关系为:风速为20m/s时,出链长度为3h+90m;30m/s时,出链长度为4h+145m。
船舶操纵基本知识

第一节 船舶常识
1.1.6.4 救生设备 1.救生圈。 (1)技术标准:浮力须达到淡水中支撑14.5千克的铁块至少达到24小时,强度须保证10米 高度投水试验不损坏或永久变形。 (2)使用方法:两手压住救生圈的一边,使它树立起来,一只手和头顺势套入圈内,再把 另一只手也套入圈内,使救生圈置于腋下,落水者便可直立浮于水中。 (3)检查保养
第一节 船舶常识
2.救生衣 (1)技术要求 两面均可同样穿着; 穿着救生衣的人在水中不做任何动作或失去知觉时,不会因头前俯致使脸部淹没在水中; 穿着救生衣的人可以转动身体至安全漂浮位置,使身体后倾仰卧,把脸部浮出水面。 成人救生衣——淡水中浮起7.5千克铁块24小时不沉。 (2)浮力标准 儿童救生衣——淡水中浮起5千克铁块24小时不沉。 救生衣应为白色或橙色,放在明显易取用之处。 (3)使用及检查保养 救生衣应穿着与上身,不可缚于腰部或下肢; 救生衣缚带必须缚牢,宜打平结,不宜打活结; 穿着救生衣自高处跳入水中,应将两臂平伸,不得向上举起 不得将救生衣作为枕头、坐垫,以防内部材料受压而减少浮力。 (4)配备标准 按定额的110%配备,客船还应配备定额的5%儿童救生衣。
第二节 船舶操纵基本知识
舵效的判别 船舶操舵后能在较短的时间和纵、横距内完 成较大的改向角,则认为该船的舵效较好; 反之,则舵效较差。
影响舵效的因素
舵角的大小 作用于舵面上的水流速度(进速) 舵的入水面积及舵的线型 舵的数量和舵机性能
船舶的倒车一般比进车舵效差得多。
第二节 船舶操纵基本知识
冲量公示:F*t=M*V t=MV/F
第二节 船舶操纵基本知识
1.2.3船舶旋回圈 2.船舶回转的运动过程: (1)转舵阶段(初始阶段) 转舵船舶开始做回转运动 特征: ①开始转舵后,因为惯性作用,船舶按原航 向前进,外倾。 ②当横向力起作用后,船舶按阻力与推理合 力的方向平移,并产生偏距和内倾。 ③航速开始降低。 (2)渐变阶段(过渡阶段,回转变化阶段) 开始回转稳定回转时止。 (3)稳定阶段(匀速圆周运动) 船舶作匀速运动时起的稳定回转期。 特征:回转各力达到平衡,漂角保持不变, 船舶重心绕回转中心做稳定的回转运:李靖
船舶操纵考点总结

船舶操纵考点总结船舶操纵考点总结第一章船舶操纵性能1.船舶由静止状态进车,达到相应稳定航速的前进距离与船舶排水量成正比,与相应的稳定的船速的平方成正比,与螺旋桨推力成反比。
2.船舶由静止状态进车,达到相应稳定航速的时间与船舶排水量成正比,与相应的稳定的船速的成正比,与螺旋桨推力成反比。
3.船舶由静止状态启动主机,到达到常速,满载船的航进距离约为船长的20倍,轻载约为满载的1/2---2/3。
4.船停船距离(冲程)/冲时:船在前进中下令停止主机至船对水停住的滑行距离和时间。
5.实测停车距离(冲程)/冲时:船在前进中下令停止主机至船对水余速将至2节时或对水速度降低到保持舵效的最低速度的滑行距离和时间。
6.停车冲程与船速的平方成正比,与排水量成正比。
7.航行船舶停车后速度变化:呈非线性变化,开始时速度下降快,而后下降慢,至终为0 8.影响冲程大小的因素与:排水量、初速度、船舶阻力、污底和浅水有关。
9.减速常数是指船舶停车后船速每递减一半所需的时间,减速常数随排水量的不同而不同,一般万吨船约为4Min.10.倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住移动时的滑行距离和时间。
11.倒车停止性能:从发令开始至船对水停止移动的这段时间所前进的距离。
12.实测倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住时的滑行距离和时间。
13.倒车停船距离:万吨级6-8L,5万吨8-10L,10万吨10-13L,15-20万吨级13-16L14.航行中船舶下令倒车后,速度的变化是主机倒车转速达到最大时下降快。
15.船舶航行中进行倒车,通常在关闭油门后,等船速降至全速的60%-70%,转速降至额定转速的25%-35%,停止主机在进行倒车启动。
16.全速倒车后,右旋螺旋桨船,向右偏转,航向变化可能超过90度,压载状态较满载状态右偏量更大。
左满舵比右满舵旋回圈小。
17.主机换向所需时间:蒸汽机指示功率60-90s,内燃机制动功率90-120s,汽轮机轴功率120-180s。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船舶操纵知识点196船舶操纵1.满载船舶满舵旋回时的最大反移量约为船长的1%左右,船尾约为船长的1/5至1/102. 船舶满舵旋回过程中,当转向角达到约1个罗经点左右时,反移量最大3. 一般商船满舵旋回中,重心G处的漂角一般约在3°~15°4. 船舶前进旋回过程中,转心位置约位于首柱后1/3~1/5船长处5. 万吨船全速满舵旋回一周所用时间约需6分钟6. 船舶全速满舵旋回一周所用时间与排水量有关,超大型船需时约比万吨船几乎增加1倍7. 船舶尾倾,且尾倾每增加1%时,Dt/L将增加10%左右8. 船舶从静止状态起动主机前进直至达到常速,满载船的航进距离约为船长的 20倍,轻载时约为满载时的1/2~2/39. 排水量为1万吨的船舶,其减速常数为4分钟大时,多的背流面容易出现空泡现象32. 舵的背面吸入空气会产生涡流,降低舵效33. 一般舵角为32~35度时的舵效最好34. 当出链长度与水深之比为2.5时,拖锚制动时锚的抓力约为水中锚重的1.6倍35. 当出链长度与水深之比为2.5时,拖锚制动时锚的抓力约为锚重的1.4倍36. 一般情况下,万吨以下重载船拖锚制动时,出链长度应控制在2.5倍水深左右37. 霍尔锚的抓力系数和链的抓力系数一般分别取为:3-5, 0.75-1.538. 满载万吨轮2kn余速拖单锚,淌航距离约为1.0倍船长39. 满载万吨轮2kn余速拖双锚,淌航距离约为0.5倍船长40. 满载万吨轮1.5kn余速拖单锚,淌航距离约为0.5倍船长41. 满载万吨轮3kn余速拖双单锚,淌航距离约为1.0倍船长42. 拖锚淌航距离计算:S=0.0135(△vk2/Pa)43. 均匀底质中锚抓底后,若出链长度足够,则抓力随拖动距离将发生变化:一般拖动约5-6倍锚长距离时,抓力达最大值44. 当风速为30m/s时,根据经验,单锚泊出链长度与水深的关系为:4h+145 m45. 当风速为20m/s时,根据经验,单锚泊出链长度与水深的关系为:3h+90 m46. 在一般风、流、底质条件下与锚地抛锚,根据经验,单锚泊出链长度为5-7倍水深47. 经验表明,船舶前进中用拖轮顶推大船船首转头时,拖轮起作用的大船的极限航速为5~6kn 48. 根据经验,风速低于15m/s,流速低于0.5kn,万吨级船舶所需拖轮功率(kw)应约为船舶总吨位的11%49. 根据经验,风速低于15m/s,流速低于0.5kn,万吨级船舶所需拖轮功率(kw)应约为船舶载重吨位的7.4%50. 固定螺距螺旋桨拖船的牵引力与主机马力可用 100马力=1.0吨牵引力概算51. 根据有关规定,载重量DWT≤2万吨的船舶,所需的港做拖船总功率为 0.075 DWT52. 根据有关规定,载重量DWT处于2万吨至5万吨的船舶,所需的港做拖船的总功率为0.060DWT53. 根据有关规定,载重量大于5万吨的船舶所需的港做拖船总功率为 0.050 DWT54. 吊拖时拖缆的俯角一般应低于 15度55. 吊拖时拖缆长度应大于被拖船拖缆出口至水面距离的4倍;但不应小于45m56. 当风舷角在30~40或140~160度时,风动力系数 Ca为最大值57. 当风舷角在0或180度时,风动力系数 Ca 为最小值58. 风压力角α随风舷角θ增大而增大,θ=40~140之间时,α大体在 80~100之间59. 风压力角α随风舷角θ增大而增大,θ=90±50之间时,α大体在 90±10之间60. 水动力系数在漂角90度左右时达最大值;在0或180度时为最小值61. 在深水中,静止中的船舶,正横附近受横风时,空载状态,水上侧面积与船长吃水之比Ba/Ld ≈1.5 时,其匀速下风漂移速度Vy≈5%Va(相对风速)62. 下风漂移速度Vy=0.041(√Ba/Ld)²Va63. 航行中的漂移速度Vy′与停船时的漂移速度Vy之间的关系:Vy′= Vy e -1.4Vs64. 船舶在均匀水流中顺流掉头的漂移距离为:流速³掉头时间³80%65. 横向附加质量约为船舶质量的0.75倍;纵向附加质量约为船舶质量的0.07倍66. 根据船模试验,水深/吃水=4~5时,船体阻力受浅水的影响应引起重视67. 根据Hooft的研究,航道宽度与船长之比W/L为W/L≤1时,船舶操纵性会受到明显影响68. 欧洲引航协会EMPA建议的外海航道富于水深为吃水的 20% 港外水道富于水深为吃水的 15% 港内水道富于水深为吃水的 10%69. 日本濑户内海主要港口的富于水深标准:吃水在9m以下,取吃水的5% 吃水在9~12m的,取吃水的8% 吃水在12m以上,取吃水的10%70. 某船船宽为B,当横倾角为θ时,其吃水增加量可由公式:B²sinθ/2估算71. 某船船长为L,当纵倾角为φ时,纵倾造成的吃水增加量可由公式:L²sinφ/2估算72. 海图水深的误差:水深范围20m以下,允许误差0.3m水深范围20~100m,允许误差1.0m73. 会产生船吸作用的两船间距约为两船船长之和的1倍;船吸作用明显加剧的两船间距约为小于两船船长之和的一半74. 两船船吸吸引力的大小与两船间距的4次方成反比;与船速的2次方成正比75. 两船转头力矩的大小与两船间距的3次方成反比;与船速的2次方成正比76. 一般超大型油轮接近泊地时,由于其排水量答,相对主机功率低,通常备车时机至少在离泊地前剩余航程20海里以上77. 一般现代化大型集装箱船舶在接近港口附近时,通常备车时机在至锚地剩余航程5海里或提前0.5 小时78. 一般现代化大型集装箱船舶在接近港口附近时,若交通条件复杂,通常备车时机在至锚地剩余航程 10海里或提前1小时79. 一般船舶在接近港口附近时,通常备车时机在至锚地剩余航程10海里或提前1小时80. 船舶舵效随航速降低而变差,一般情况下,手动操舵保持舵效的最低航速约为2~3kn81. 船舶舵效随航速降低而变差,一般情况下,自动操舵保持舵效的最低航速约为8kn以上 82. 实际操纵中,一般万吨船能保持舵效的最低船速约为2kn83. 根据经验,在港内掉头中,对于单车右旋螺旋桨船舶,若先降速,而后提高主机转速,操满舵向右掉头,应至少需要直径3.0倍的船长84. 根据经验,在港内掉头中,若有一艘拖船可用进行掉头,应至少需要直径2.0倍船长的圆形掉头区域85. 受水域限制,单桨船利用锚和风、流有力影响自力掉头取应需2.0倍船长直径的水域86. 根据经验,在港内掉头中,若有两艘以上拖船可用进行掉头,应至少需要直径1.5倍船长的圆形掉头区域87. 重载万吨级船顺流抛锚掉头时,流速以1~1.5kn为宜88. 顺流抛锚掉头一般出链长度应为 2.5~3.0倍水深89. 顶流拖首掉头,满载万大于2倍船宽94. 万吨级船舶,风速不大,顶流靠泊时靠拢角的最大值:α=arctanVb/Vc Vb——接近码吨轮应在掉头位置1000米以外停车淌航90. 对于总长度大于100米的船舶,泊位有效长度应当至少为船舶总长的120%91. 靠泊操纵中,在通常情况下船首抵达泊位中点时船舶最大余速应控制在2kn以下 `96. 靠泊操纵中,超大型船舶接触直壁式码头的速度应控制在2~5cm/s97. 靠泊操纵中,超大型船舶进靠海上泊位的速度应低于5cm/s98. 靠泊操纵中,万吨级船舶进靠栈式泊位的速度应低于10cm/s99. 靠泊操纵中,10万吨级船舶进靠栈式泊位的速度应控制在2-8cm/s100. 靠泊操纵中,20~30万吨级船舶进靠栈式泊位的速度一般应控制在1~5cm/s101. 一般情况下,在船舶顶流拖首离泊时选择的离泊角度,流急时约为10度左右,流缓时约为20度左右102. 靠泊仪可只是船首尾距码头距离和入泊角度,其量程和精度分别为:0~150米(±1%);0~20cm/s (± 1%)103. 一般空载万吨级船舶1.5kn流速影响约与5级风相影响抵消104. 一般空载万吨级船舶2kn流速影响约与6级风相影响抵消105. 右旋单车船顶风系单浮风力较弱时,应与浮筒保持1~1.5倍船宽横距置于右舷,以维持舵效最低航速驶近,距浮筒约0.5~1倍船长左右,采用倒车停船106. 船舶系双浮筒时,如抛开锚,一般下锚点距浮筒连线的横距约需30~40m107. 一般大型船舶在尾系泊时,船首应用交角约为20度的八字锚形式固定108. 船舶采用尾靠泊方法时,抛锚点距码头边应有出链长与1.1倍船长之和的距离109. 尾系泊时顺风进泊,倒车后淌航接近上风侧锚位时宜控制余速在1kn以内,出链2.5倍水深110. 空船5-6级风,并靠重载锚泊大船,宜从锚泊船下风舷接近并靠泊111. 万吨空船在风力3-4级时并靠超大型锚泊船,一般应靠锚泊船的上风舷112. 过船闸前应事先向船闸当局申请并悬持国际信号旗 K旗113. 适合DW一万吨级货轮抛锚的锚地水深一般为:15~20m114. 在有浪、涌侵入的开场锚地抛锚时,其低潮时的锚地水深至少应为 1.5倍水深+2/3最大波高115. 根据经验,一般万吨船在大风浪中锚泊时,充分考虑安全锚泊条件,至少应距下风方向10m 等深线 2海里116. 单锚泊时本船与周围其他锚泊船或附表的距离可定为:一舷全部链长 + 1倍船长117. 在水深能满足要求的锚地抛锚,锚位至浅滩、陆岸的距离应有:一舷全部链长 + 2倍船长118. 港内锚地的单锚泊所需的水域的半径按:1倍船长 + 60-90m 估算119. 港内锚地的八字锚泊所需的水域的半径按: 1倍船长 + 45m120. 深水区抛锚,锚地最大水深一般不得超过一舷锚链总长的 1/4121. 水深大于25m时,需用锚机将锚全部送达海底而后用刹车带将锚抛出;小于25米时可以自由落下122. 深水抛锚的水深极限一般可取 85米 123. DW一万吨级商船抛锚时,对地船速一般应控制在2kn以下124. 锚泊时,一般最初的出链长度为2.5倍水深时即应刹住,使其受力后在松链125. 采用一字锚锚泊方法时,一般情况下,力链和惰链链长应分别控制在 3节和3节;强流情况下,迎流锚链应为4节,落流锚链应为3节126. 抛八字锚应保持两链间的合适夹角是30~60度;从减轻偏荡、环节冲击张力和增加稳定度出发两锚链张角以60-90度为宜127. 八字锚两交角在60度左右时,其抓力约为单锚抓力的1.7~1.8倍128. 为避免或减少船舶因流影响而回转所产生的双链绞缠,最好选择船舶在受台风影响,风力达到6 级风以上时改抛一点锚129. 单锚泊船大幅度偏荡时,小型船锚链受冲击张力大约为正面风压力的3~5倍130. 单锚泊船偏荡激烈时,可加抛止荡锚,其出链长度以 1.5~2.5倍水深为宜131. 空船偏荡幅度较大,加大吃水是减小船体偏荡的有效措施,至少应加至满载吃水的75% 132. 驾驶台居尾有抑制偏荡的作用133. 强风中的单锚泊船偏荡时使用止荡锚,其锚泊力可抗风的程度以20m/s风速为限134. 超大型船舶靠泊时的靠拢角度多取为 0 度;接近码头的速度应低于5cm/s135. 大型油轮在风速15m/s条件下,有拖船协助掉头,需要直径为2.0L的掉头区域136. 超大型船舶在锚泊时,抛锚时多采用深水退抛法,余速控制在0.5节以下137. 超大型船单点系泊过程中,波浪较小时,出缆长度多为水面至缆孔高度的1.5倍;波浪明显时,则松长些为好138. 一般情况下,超大型船舶当离锚地的锚泊点1海里时,其速度应控制在2节左右139. 根据试验结果,4万吨油轮在停车后余速约3.2节时无舵效140. 根据试验结果,23万吨油轮满载时在16节的船速下紧急停船,其冲程约为4000米,冲时约为20 分钟141. 根据实验结果,超大型船舶在水深与吃水之比为1.25倍时,进行旋回试验,其旋回圈比深水中增大约为70%142. 根据国际石油开发公司(IMODOC)浮筒设计的要就,在余速为30m/s,流速为5kn时船舶仍可进行单点系泊安全作业143. 岛礁水域呈现深紫蓝色,则水深 H>70M 黄绿色 2M <H<5m带白的蓝色 H≈15m带紫的蓝色 H≈30m144. 珊瑚岛礁多见于平均水温为25℃~35℃,海流较强的热带水域145. 通过岛礁区时的航线拟定,若水域允许,一般至少要离礁盘 6 海里以外146. 在晴朗的白天,大冰山的视距可达10海里147. 在晴朗的黑夜,用望远镜可在1海里处看到冰山148. 露出水面3米的冰山,雷达探测到该冰山的距离大约为2.0海里149. 冰清通报中,称为“冰山”的直径约为 30m以上小冰山 6~30m冰岩 2-6m冰原 D大于5海里冰量一般以10法度量,分为8级若船舶不再海洋的寒流中,则当海水温度为1.1℃时,海水的冰缘已在100~150海里之内0.5 50雷达探测高达的冰山时,有时可以在 10 海里的距离上显示回拨进入冰区航行前,个水舱的水量不得超过90% 冰区航行前,上层边水舱,边水舱与前后尖舱的水量应不超过满载的85%进入冰区之前,必须保证一定的吃水,以使螺旋桨和舵没入水中一定深度,并保持1.0~1.5m的尾倾冰量在5/10时,只要冰厚不超过30cm,就可以通航冰量达6/10时,船舶航行比较困难,应争取破冰船引航当海面涌浪较大或有5级以上横风时,船舶不宜进入冰区船舶通过冰区航行过程中,冰量为4/10~5/10以下时,可以常速航行冰量增加1/10,应减速1节航行 161. 破冰船开路护航,编队船间距离宜保持2~3倍本船船长在冰量大且有压力的冰中拖带时,拖缆宜尽量缩短,一般为20~40米深海坦谷波的波速c和波浪周期τ与波长λ间的关系: c=1.25√λτ=0.8√λ c=1.56τ大洋中易产生的波浪的波长时80~140m,周期为7~10s;最陡的波的倾斜度为1/10,一般为1/30~1/40 有1/10的波高是平均波高的2倍,称为最大波高有1/3 的报告时平均波高的1.6倍,称为有义波高或三分之一平均波高海上不规则波的最大能量波长约为三一波高的40倍海上不规则波的最大有义波长约为三一波高的60倍当水深H大于λ/2时为深水波,反之为浅水波货船压在情况下航行,其横摇周期一般为7—10s 万吨级货船满载情况下航行,其横摇周期一般为9—14s根据经验数据,超大型油轮的横摇周期,一般空载时为6s以下满载 14s以上168. 简易估算船舶固有横摇周期,横摇周期系数约取 0.8169. 稳性高度GM与船宽B影响船舶的横摇,一般来说若 GM>B/10 横摇过于剧烈GM<B/30 横摇过“软”GM>B/30 横摇适中船舶在大风浪中避开谐振的条件是:Tθ/τe 小于0.7或者大于1.3 谐振范围是:0.7≤Tθ/τe≤1.3171. 波速=波长/波浪周期波浪遭遇周期的估算公式(其中λ为波长,C为波速,Vs为船速,φ为浪向角):τ=λ/( C + Vs cosφ)173. 船舶在大风浪中谐摇的横倾角,可用7.93倍最大波面角的平方根估算174. 风浪中航行的船舶,在纵摇周期和遭遇周期不变的情况下,纵摇摆幅与船长L和波长λ的比值有关;当L大于1.5λ时,纵摇摆幅最小;当L远小于λ时,纵摇摆幅最大175. 当船长大于1.5倍波长时,则船舶在游泳中的相对比值摇摆幅小于0.4 176. 当船长大于1.3倍波长时,则船舶在游泳中的相对比值摇摆幅小于0.6177. 万吨船空载在风浪中航行时,为了减轻螺旋桨打空车,应保持螺旋桨桨叶没入水中20~30%的螺旋桨直径178. 为确保风浪中空载船舶的航行安全,适当压在应以夏季满载排水量的50%~53%为好 179.万吨船风浪中压载航行,即防止空车又减轻拍底,尾倾吃水差以1.5~2.0m为宜180. 滞航是指以保持舵效的最小速度,将风浪放船首2~3个罗经点的方位上迎浪前进181. 抢滩时若条件许可应尽量选择适合于该船的坡度,一般小型船选:1:15 中型 1:17 大型1:19~1:24国际海事组织全球搜救计划中将全世界海区划为13个区在搜寻遇难船时,确定搜寻基点后,开始搜寻阶段的最可能区域时以基点为中心半径为10海里的圆的外切正方形扇形搜寻方式中,第一个搜寻循环中每次转向角为120,第一个搜寻循环结束时,右转30度进入第二个搜寻循环在海面平静的情况下应尽快释放救生艇或救助艇抢救落水人员,放艇时大船的余速不应超过5kn186. 船舶释放救生艇时,纵倾不应大于10度,横倾不应大于20度187. 航行中的船舶在风浪大的海面上放艇,应将航速减至能维持舵效的速度,使放艇舷侧处于下风舷,为避免遭受横浪,应保持风舷角为20~30度188. 海上拖带,拖缆应具有的悬垂量d应为拖缆长度的6%189. 海上拖带,要求拖缆在水中有一定的下沉量,当海面比较平静时该下沉量应不少于8m 当风浪大时该下沉量应不少于13m190. 海上拖带中,拖带距离较短,海面平静时,拖缆的安全系数取为: 4 海面有风浪时,拖缆的安全系数取为:6—8191. 海上拖带转向应每次转5~10度分段完成192. 在汽缸尺寸和转速等相同的条件下,二冲程柴油机的功率是四冲程柴油机的 1.7倍左右193. 空调装置中的加湿器一般在摄氏气温低于0 度时投入工作194. 海船舵机的电动舵角指示器在最大舵角时的指示误差不应超过±1°195. 锚机的过载拉力应不小于额定拉力的 1.5倍。