弹性力学第七章
弹性力学-第7章 空间问题
zx
z
dz
zy
zy
z
dz
z 0
y
y
yx yz
xy
x
yz
yz
y
dy
fz
fy fx
xz
yx
y yx dy
y
y y
dy
zx zy
x
x
x x
dx
z
根椐平衡条件: Fx 0
xz
xzx
x
dx
x
x
x
dx dydz
xdydz
(
yx
yx
x
dy)dxdz
yxdxdz
( zx
zx
z
dz)dxdy
zxdxdy
Xdxdydz
0
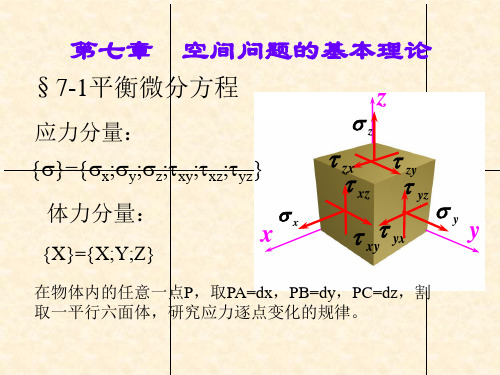
§7-1平衡微分方程
x x
yx y
zx
z
fx
0
xy
y
x
y
zy
z
f y
0
xz yz
x
y
z z fz 0
(7-1)
平面应力问题:
1、平面应力问题z方向应力为零:
0
xz
yz
0
z
2、所有的应力、应变和位移分量均与z无关,仅是x,y的函数。 以上方程可以直接转化为平面应力的平衡方程。
在计算任一平面上的应力时,方向余弦l,m,n可变化,但 均为有限值,故必存在某个平面,其上正应力取得极值。
主平面:正应力取得极值的平面。 主应力:主平面上的正应力。 主方向:主应力的方向,也称应力主向。 在主平面上,正应力取极值、剪应力为零。
二、主应力的确定:
设主平面存在,其外法线为n,
弹性力学复习思考题
其中: 为曲梁圆周边界上的分布载荷。 其中: q 为曲梁圆周边界上的分布载荷。 M, Q分别为梁截面上弯矩与剪力。 分别为梁截面上弯矩与剪力。 分别为梁截面上弯矩与剪力 应力函数: 结合应力分量与应力函数的关系确定 应力函数:
2 σθ = 2 r
= f (r)
= f (r) sin θ
= f (r) cosθ
力偶、 (9)半无限平面体在边界上作用力偶、集中力、分布力下,应力函数 )半无限平面体在边界上作用力偶 集中力、分布力下 、应力分量、位移分量的确定? 应力分量、位移分量的确定? 应力分量、位移分量的确定? (10)圆孔附近应力集中问题应力函数 、应力分量、位移分量的确定? ) (11)叠加法的应用。 )叠加法的应用。
X = l(1+ )αT,
Y = m(1+ )αT
(5)温度应力问题求解的基本思路与方法: )温度应力问题求解的基本思路与方法: (a)求出满足位移平衡方程(6-18)的一组特解(此时,无需满足 )求出满足位移平衡方程( )的一组特解(此时, 边界条件;用位移势函数求解)。 边界条件;用位移势函数求解)。 (b)不计变温,求出满足平衡方程(6-18)的一组补充解(常由应 )不计变温,求出满足平衡方程( )的一组补充解( 力函数求解,其边界条件为特解给出的面力)。 力函数求解,其边界条件为特解给出的面力)。 的概念; 与位移分量的关系; (6)位移势函数 ψ 的概念;位移势函数 ψ 与位移分量的关系;温 ) 度应力问题中, 满足的方程; 度应力问题中,位移势函数 ψ 满足的方程;应力分量的位移势 的表示。 函数 ψ 的表示。
王俊民 编 徐秉业 编
《弹性力学学习方法及解题指导》 弹性力学学习方法及解题指导》
同济大学出版社 机械工业出版社
《弹性力学简明》习题提示和参考答案
题提示和答案《弹性力学简明教程》习题提示和参考答案第二章习题的提示与答案2-1 是2-2 是2-3 按习题2-1分析。
2-4 按习题2-2分析。
2-5 在的条件中,将出现2、3阶微量。
当略去3阶微量后,得出的切应力互等定理完全相同。
2-6 同上题。
在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。
其区别只是在3阶微量(即更高阶微量)上,可以略去不计。
2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。
2-8 在大边界上,应分别列出两个精确的边界条件;在小边界(即次要边界)上,按照圣维南原理可列出3个积分的近似边界条件来代替。
2-9 在小边界OA边上,对于图2-15(a)、(b)问题的三个积分边界条件相同,因此,这两个问题为静力等效。
2-10 参见本章小结。
2-11 参见本章小结。
2-12 参见本章小结。
2-13 注意按应力求解时,在单连体中应力分量必须满足(1)平衡微分方程,(2)相容方程,(3)应力边界条件(假设)。
2-14 见教科书。
2-15 见教科书。
2-16 见教科书。
2-17 取它们均满足平衡微分方程,相容方程及x=0和的应力边界条件,因此,它们是该问题的正确解答。
2-18 见教科书。
2-19 提示:求出任一点的位移分量和,及转动量,再令,便可得出。
第三章习题的提示与答案3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解:(1)校核相容条件是否满足,(2)求应力,(3)推求出每一边上的面力从而得出这个应力函数所能解决的问题。
3-2 用逆解法求解。
由于本题中l>>h, x=0,l 属于次要边界(小边界),可将小边界上的面力化为主矢量和主矩表示。
3-3 见3-1例题。
3-4 本题也属于逆解法的问题。
首先校核是否满足相容方程。
再由求出应力后,并求对应的面力。
本题的应力解答如习题3-10所示。
应力对应的面力是:主要边界:所以在边界上无剪切面力作用。
第七章 弹性力学空间问题解答
§7-1 空间问题的基本方程 1. 平衡微分方程方程
2. 几何方程
3. 物理方程
各种弹性常数之间的关系
4. 相容方程
5. 边界条件:
位移边界条件:对于给定的表面Su,其上沿 x,y,z方向给定位移为 ,则
应力边界条件:给定表面上的面力为
• 求解空间问题同样有位移法、应力法和应力函 数法三种方法。
§7-2柱坐标和球坐标系下的基本方程
• 一. 柱坐标系下的基本方程
直角坐标系下,空间一点M的位置由(x,y,z)表示,在柱坐 标系下,空间一点M的位置由(r, q, z)表示。两坐标间的关 系为:
在柱坐标系下的应力分量为
应变分量为 位移分量为
柱坐标表示的基本方程 • 1. 平衡方程
(7-1)
• 2. 几何方程
(7-6)
(2)几何方程:将式(7-5)代入式(7-2),得
(7-7)
(3)物理方程:将式(7-5)代入式(7-4),得
(7-8)
(4)空间轴对称问题位移求解的基本方程
空间轴对称问题共有四个应力分量,两个位移分量。 以位移求解更方便。 将几何方程(7-7)代入物理方程(7-8),得
(7-9)
• 将式(7-9)代入平衡方程(7-6),化简后得
1. 位移法:将几何方程代入物理方程,得到用位移
表示的应力分量,再将应力分量代入平衡方程和应力边 界条件,即得到空间问题的位移法控制方程。
2. 应力法:以应力作为基本未知量。将相容方程用应 力表示——应力控制方程
3. 应力函数法:先引入应力函数,满足微分平衡方
程。 由微分平衡方程得应力函数与应力分量的关系,再将 用应力函数表示的应力分量代入相容方程,得到一组 用应力函数表示的相容方程,即应力函数表示的控制 方程。
自编教材第七章材料弹性变形与内耗
第七章 材料弹性变形与内耗固体材料在受外力作用时,首先会产生弹性变形,外力去除后,变形消失而恢复原状,因此,弹性变形有可逆性的特点。
材料的弹性变形是人们选择和使用材料的依据之一,近代航空、航天、无线电及精密仪器仪表工业对材料的弹性有更高要求,不仅要有高的弹性模量,而且还要恒定。
另一方面,材料的弹性模量是组织不敏感参量,准确测定材料的弹性模量,对于研究材料原子的相互作用和相变等都具有工程和理论意义。
实际上,绝大多数固体材料很难表现出理想的弹性行为,或是材料在交变应力作用下,在弹性范围内还存在非弹性行为,并因此产生内耗。
内耗代表材料对振动的阻尼能力,作为重要的物理性能,工程上有些零件要求材料要有高的内耗以消振,如机床床身、涡轮叶片等,而有些零件则要求材料有低的内耗,以降低阻尼,如弹簧、游丝、乐器等。
另一方面,内耗是结构敏感性能,故可用于研究材料的内部结构、溶质原子的浓度以及位错与溶质原子的交互作用等材料的微观结构问题,是一种很有效的物理性能分析方法。
第一节 材料弹性变形一.弹性模量及弹性变形本质在弹性范围内,物体受力的作用要产生应变,其应力和应变之间的关系符合胡克定律σ=E ε, τ=G γ,p=K θ (7-1)式中,σ、τ和p 分别为正应力、切应力和体积压缩应力;ε、γ和θ 分别为线应变、切应变和体积应变;比例系数E 、G 和K 分别为正弹性模量(杨氏模量)、切变模量和体积模量。
它们均表示材料弹性变形的难易程度,即引起单位变形所需要的应力大小。
在各向同性的材料中,它们之间的关系是G =)1(2μ+E (7-2) K = )21(3μ-E (7-3) 式中,μ为泊松比,即当材料受到拉伸或压缩时,横向应变与纵向应变之比。
可以证明,如果材料在形变时体积不变,则泊松比为0.5。
大多数材料在拉伸时有体积变化(膨胀),泊松比为0.2~0.5。
对于多数金属的μ值约在0.25~0.35之间,G/E 的实验值大约是3/8。
《弹性力学》第七章 平面问题的差分解
4 f 1 2 2 4 [4 f 0 2( f1 f 2 f 3 f 4 ) ( f 5 f 6 f 7 f8 )] x y h 0 4 f 4 y 1 4 [6 f 0 4( f 2 f 4 ) ( f10 f12 )] h 0
弹性力学的经典解法存在一定的局限性,当弹性体的边 界条件和受载情况复杂一点,往往无法求得偏微分方程的边 值问题的解析解。因此,各种数值解法便具有重要的实际意 义。差分法就是数值解法的一种。 所谓差分法,是把基本方程和边界条件(一般均为微分 方程)近似地改用差分方程(代数方程)来表示,把求解 微分方程的问题改换成为求解代数方程的问题。
T (T0 Te ) x 0
其中 Te 为边界以外的介质的已知温度。应用差分公式,可得:
T1 T3 (T0 Te ) 2h
解出 T1 ,代入(1)式,即得修正的差分方程:
2h 2h 4 T0 T2 2T3 T4 Te
第七章 平面问题的差分解
§7-1 差分公式的推导 §7-2 稳定温度场的差分解 §7-3 不稳定温度场的差分解 §7-4 应力函数的差分解 §7-5 应力函数差分解的实例 §7-6 温度应力问题的应力函数差分解 §7-7 位移的差分解 §7-8 位移差分解的实例 §7-9 多连体问题的位移差分 解 习题课
2 2 2 T h T 2 T0 TA h 2 x A x A 2 1 T 2 2 T T3 TA (1 )h (1 ) h 2 x x A 2 A
§7-2
稳定温度场的差分解
本节以无热源的、平面的、稳定的温度场为例,说明差分 法的应用。 在无热源的平面稳定场中,t 0, z 微分方程简化为调和方程 2T 0 ,即:
弹性力学 第七章平面问题的极坐标解答

arctan y
x
y r sin
x
y
r x
y
两种坐标系下位移分量坐标转换公式:
ur u
v sin u cos
v
cos
u
sin
u v
ur ur
cos sin
u u
sin cos
r
u
x
u
v
ur y
2、极坐标下的平衡微分方程
•几何描述
PB面积:rd AC面积:(r+dr)d
第七章 平面问题的极坐标解答
•本质上坐标系的选择并不影响弹性力学问题的求 解。 •但是影响边界条件的描述和表达,从而关系问题 的求解难易程度。 •圆形,楔形,扇形等物体,采用极坐标系求解比 较方便。
采用极坐标可更方便几何定位描述。
§7-1 平面问题的极坐标方程
1、极坐标与直角坐标之间的关系式:
r2 x2 y2
rds 1 xds cos 1 cos yds sin 1 sin
xyds cos 1 sin yxds sin 1 cos 0
用 xy 代替 yx 简化以后,得
r x cos2 y sin2 2 xy sin cos
o
yx y
x
y
B x
y
r
xy xya
c
A
x
b r r
同样可由三角板A的平衡条件F=0,得到 r ( y x )sin cos xy (cos2 sin2 )
和y分别改换为r和 。
r
1
E
2
( r
1
)
1 2
E
(
1
r
)
r
第七章_弹性力学平面问题的极坐标系解答讲解

r= -qb,r=0
本问题仍为轴对称问题,且体力为零,
可采用前述的应力函数求解方程,也可按位移法求解。
1.按应力函数法求解
按应力函数求解前面已导出应力分量和位移表达式:
, ,
平面应力问题的位移:
法求解:
由基本方程 得
代入应力与位移之间关系式,对于平面应力问题,有
其中Brsin=By可略去。
将( r,)代入应力分量表达式
A、C、D由力的边界条件来定。
力的边界条件:在主要边界上,
在r = a:r= 0,r= 0, 2Aa+C/a-2D/a3= 0
在r = b:r= 0,r= 0, 2Ab+C/b-2D/b3= 0
在次要边界上,
在=0,环向方向的面力为零, 满足。
在= 0: 由于主要边界满足,则此式自然满足;
在= 0:
(3)
主要边界满足时,由(1)、(2)、(3)求出A、B、C,应力求出后,依次可求出应变和位移表达式,详细推导在徐芝纶(上册)P.91-92。
在徐芝纶(4-13)中I、K、H为刚体位移,I = u0、K = v0, H =。
可利用约束确定,如令r0=(a+b)/2,= 0处
应力分量表达代入几何方程的第一式并积分,得
——(b)
考虑位移单值性比较(a)和(b)式:
4Br-F=0B=F=0
轴对称问题的应力和位移解为:
, ,
,
A、C由两个力的边界条件确定。
对于无体力圆盘(或圆柱)的轴对称问题,
则根据圆盘(或圆柱)中心应力和
位移有限值,得
A=0
图示圆盘受力情况,得应力为r==2C= -q
然后,利用r = a时, ,得
塑性应力应变关系

z
z
ϕLeabharlann ij m(7.2—13) (7.2—14)
ε = ϕ ⋅τ ,
xy
xy
ε = ϕ ⋅τ ,
yz
yz
ε zx = ϕ ⋅τ zx
如果认为在整个变形过程中材料不可压缩,泊松比ν = 0.5 ,则 K 0 = 0 ,式(7.2—13) 简化为:
ε ij = ϕ (σ ij − δ σij m ) = ϕ ⋅ sij
(7.1—10)
可见,服从广义胡克定律的各向同性线弹性材料,其应力莫尔圆与应变莫尔圆在几何
上是相似的,应力罗代参数 µ σ 等于应变罗代参数 µ ε 。等效应力与等效应变之间也有简 单关系。由等效应力定义式得:
σ= 1 2
(σ 1
−σ
)2
2
+ (σ
2
−σ 3)2
+ (σ
3
−σ1)2
= 2G 2
(ε 1 − ε 2 ) 2 + (ε 2 − ε 3 ) 2 + (ε 3 − ε 1 ) 2
+
eP ij
+ δ ij ε m
=
1 2G
s ij
+
φ 2G
s ij
+ 1− 2ν E
δσ ij m
=
1+φ 2G
s ij
+ 1− 2ν E
δ ijσ m
(7.2—12)
令 1+φ 2G
=ϕ
, 1− 2ν E
=
K 0 ,式(7.2—12)可改写成汉基理论的常用表达式:
ε ij = ϕs ij + K 0 δ ij σ m
求解小弹塑性变形问题,等同于求解某一非线性弹性力学问题,因此获得了广泛的应用。
第七章粘弹性课后习题

第七章粘弹性一、思考题1. 何谓高聚物的力学性能?从承载速度区分,力学性能可分为哪几类?2. 何谓粘弹性?何谓Boltzmann 叠加原理?何谓时温等效原理?3. 粘弹性实验一般有哪些?何谓应力松弛和蠕变?什么是松弛模量和蠕变柔量?松弛时间与推迟时间有何异同?4. 什么是高聚物的力学滞后和内耗?表征高聚物动态粘弹性的参量有哪些?用什么参量描述其内耗大小?5. 如何由不同温度下测得的E-t 曲线得到某一参考温度下的叠合曲线?当参考温度分别取为玻璃化温度和玻璃化温度以上约50C时,WLF方程中的C2应分别取何值?哪一组数据普适性更好?6. 粘弹性力学模型中的基本元件和基本连接方式有哪些?它们有何基本关系式?写出Maxwell 模型和Voigt 模型的基本微分方程。
广义Maxwell 模型和广义Voigt 模型分别适用于描述高聚物在什么情况下的性质?二、选择题1.高聚物的蠕变与应力松弛的速度( ) CD与温度无关②随着温度增大而减小③随着温度增大而增大2 •用T g为参考温度进行E t曲线时温转换叠加时,温度低于T g的曲线,其lg a值为( )C1 正,曲线向右移动C2 负,曲线向左移动C3 负,曲线向右移动C4 正,曲线向左移动3.高聚物发生滞后现象的原因是( )C1 高聚物的弹性太大C2 运动单元运动时受到内摩擦力的作用C3 高聚物的惰性大4.Voigt 模型可用于定性模拟( )C1 线性高聚物的蠕变C2 交联高聚物的蠕变C3 线型高聚物的应力松弛C4 交联高聚物的应力松弛5.Maxwell 模型可用于定性模拟( )C1 线型高聚物的蠕变C2 交联高聚物的蠕变③线型高聚物的应力松弛(④交联高聚物的应力松弛6 •高聚物黏弹性表现最为明显的温度是()①v T g ②高于T g附近③T f附近7. 高聚物的蠕变适宜用()的模型来描述。
①理想弹簧和理想黏壶串联(②理想弹簧和理想黏壶并联③四元件模型8. 高聚物的应力松弛适宜用哪种模型来描述?()①广义Maxwell模型②广义Voigt模型③四元件模型9. 对于交联高聚物,以下关于其力学松弛行为哪一条正确?()③蠕变能回复到零③应力松弛时应力能衰减到零③可用四元件模型模拟三、判断题(正确的划“V”,错误的划“X”)1. 交联聚合物的应力松弛现象,就是随时间的延长,应力逐渐衰减到零的现象。
弹性力学 第七章 平面问题的极坐标解

第七章平面问题的极坐标解知识点极坐标下的应力分量极坐标下的应变分量极坐标系的Laplace算符轴对称应力分量轴对称位移和应力表达式曲梁纯弯曲纯弯曲位移与平面假设带圆孔平板拉伸问题楔形体问题的应力函数楔形体应力楔形体受集中力偶作用极坐标平衡微分方程几何方程的极坐标表达应力函数轴对称位移厚壁圆筒作用均匀压力曲梁弯曲应力曲梁作用径向集中力孔口应力楔形体边界条件半无限平面作用集中力一、内容介绍在弹性力学问题的处理时,坐标系的选择从本质上讲并不影响问题的求解,但是坐标的选取直接影响边界条件的描述形式,从而关系到问题求解的难易程度。
对于圆形,楔形,扇形等工程构件,采用极坐标系统求解将比直角坐标系统要方便的多。
本章的任务就是推导极坐标表示的弹性力学平面问题基本方程,并且求解一些典型问题。
二、重点1、基本未知量和基本方程的极坐标形式;2、双调和方程的极坐标形式;3、轴对称应力与厚壁圆筒应力;4、曲梁纯弯曲、楔形体和圆孔等典型问题§7.1 平面问题极坐标解的基本方程学习思路:选取极坐标系处理弹性力学平面问题,首先必须将弹性力学的基本方程以及边界条件通过极坐标形式描述和表达。
本节的主要工作是介绍基本物理量,包括位移、应力和应变的极坐标形式;并且将基本方程,包括平衡微分方程、几何方程和本构关系转化为极坐标形式。
由于仍然采用应力解法,因此应力函数的极坐标表达是必要的。
应该注意的是坐标系的选取与问题求解性质无关,因此弹性力学直角坐标解的基本概念仍然适用于极坐标。
学习要点:1、极坐标下的应力分量;2、极坐标平衡微分方程;3、极坐标下的应变分量;4、几何方程的极坐标表达;5、本构方程的极坐标表达;6、极坐标系的Laplace算符;7、应力函数。
1、极坐标下的应力分量为了表明极坐标系统中的应力分量,从考察的平面物体中分割出微分单元体ABCD,其由两个相距dρ的圆柱面和互成dϕ的两个径向面构成,如图所示在极坐标系中,用σρ 表示径向正应力,用σϕ 表示环向正应力,τϕρ 和τρϕ 分别表示圆柱面和径向面的切应力,根据切应力互等定理,τϕρ =τρϕ 。
弹性力学第七章 主应力

(7-3)
p2
2 n
2 n
px2
p
2 y
pz2
2 n
px2
p
2 y
pz2
2 n
(7-4)
弹性力学简明教程
NORTHEASTERN UNIVERSITY
§7-2 物体内一点的应力状态
如果ABC是边界面,px, py , pz 成为面力分量
fx, fy, fz
弹性力学简明教程
NORTHEASTERN UNIVERSITY
§7-5 轴对称问题的基本方程
弹性力学简明教程
NORTHEASTERN UNIVERSITY
§7-5 轴对称问题的基本方程
轴对称问题: 在空间问题中,如果弹性体的几何形状、约束情况,以及所受的外
力作用,都是对称于某一轴(通过这个轴的任一平面都是对称面),则 所有的应力、变形和位移也就对称于这一轴。轴对称问题的弹性体的形 状一般为是圆柱或半空间。
( x
1)
m1 l1
yx
n1 l1
zx
0
xy
m1 l1
( y
1)
n1 l1
zy
0
可以求得 m1 , n1 的比值,再利用 l 2 m2 n2 1 求出:
l1 l1
l1
1
2
2
1
m1 l1
n1 l1
同样也可以求出其他主应力的方向余弦。
弹性力学简明教程
NORTHEASTERN UNIVERSITY
E
(7-13)
弹性力学简明教程
NORTHEASTERN UNIVERSITY
§7-4 几何方程及物理方程
弹塑性断裂力学简介

7.1 裂纹尖端旳小范围屈服 7.2 裂纹尖端张开位移 7.3 COD测试与弹塑性断裂控制设计
返回主目录
1
第七章 弹塑性断裂力学简介
线弹性断裂力学 (LEFM )
用线弹性材料物理模型,按照弹性力学措施,研究 含裂纹弹性体内旳应力分布,给出描述裂纹尖端应 力场强弱旳应力强度因子K,并由此建立裂纹扩展 旳临界条件, 处理工程问题。
b服as,ed在o弹n a塑n性ela材st料ic 中cra却ck不t能ip承
sys
B A
s受ol。uti为on了. W承h受en这y些iel力din,g塑oc性cu区rs,
D K
s尺tr寸ess必m需us增t r大ed。istribute in order o rp
x
to satisfy equilibrium.
解: 1)无限大致中半椭圆表面裂纹最深处旳K最大, 考虑小范围屈服,在发生断裂旳临界状态有:
K1=1.1sQp ac = K1c ;
a
c=
Q 2K12c
1.21s 2p
Q 2= 1 + 1.47(0.5)1.64- 0.212(500 / 600 )2 = 1.32
20
故得到:
ac=
Q2K12c 1.21s 2p
将断裂判据式二边平方, 再将Q2代入,得: 1.21sc2 p a = K12c [1.034- 0.212( sc / sys )2]
21
即有:
sc2
=1.21p
(s1 -s 2 )2 + (s 2 - s 3 )2 + (s 3- s1)2=2 sy2s
6
将各主应力代入Mises屈服条件,得到:
弹性力学-00

教材与主要参考书
《弹性力学简明教程》
徐芝纶 编 高等教育出版社 铁木辛柯 (Timoshenko)编 科学出版社
《弹性理论》
《弹性理论基础》 陆明万等 编
清华大学出版社
第一章 绪
论
§1-1 弹性力学的研究内容 §1-2 弹性力学中的几个基本概念
§1-3 弹性力学中的基本假定
§1-1 弹性力学的研究内容
保证 s lim
s 0
Q s
中极限的存在。
2. 线弹性假定
假定物体完全服从虎克(Hooke)定律,应力与应变间 成线性比例关系(正负号变化也相同)。
比例常数 —— 弹性常数(E、μ)
脆性材料—— 一直到破坏前,都可近似为线弹性的; 塑性材料—— 比例阶段,可视为线弹性的。 作用: 可使求解方程线性化
s lim
A0
Q
(1) P点的内力面分布集度 ----P点的应力 A (2) 应力矢量. Q的极限方向 应力的法向分量 —— 正应力 应力的切向分量 —— 剪应力
P ΔA
ΔQ
n
(法线)
由外力引起的在 P点的某一面上内力分布集度
应力分量 单位:
与面力相同
MPa (兆帕)
应力关于坐标连续分布的
x
w
S
P
P v
u
O
y
弹性力学问题: 已知外力、物体的形状和大小(边界)、材料特性(E、 μ)、约束条件等,求解应力、应变、位移分量。
需建立三个方面的关系:
(1)静力学关系: 应力与体力、面力间的关系; (2)几何学关系: 形变与位移间的关系;
(3)物理学关系: 形变与应力间的关系。
§1-3 弹性力学中的基本假定
弹性力学主要内容及参考书目《弹性力学》
弹性力学的主要章节内容
第一章 第二章 第三章 第四章 第五章 第六章 第七章 第八章 第九章 第十章 第十一章 第十二章 绪 论 平面问题的基本理论 平面问题的直角坐标解答 平面问题的极坐标解答 平面问题的复变函数解答 温度应力的平面问题 平面问题的差分解 空间问题的基本理论 空间问题的解答 等截面直杆的扭转 能量原理与变分法 弹性波的传播
教材与主要参考书
教材: 《弹性力学》(上册,第三版)
徐芝纶 编 高等教育出版社 (Timoshenko)编 科学出版社 同济大学出版社 清华大学出版社
参考书:《弹性理论》 铁木辛柯
பைடு நூலகம்
《弹性力学》 吴家龙 编
《弹性理论基础》 陆明万等 编 《弹性力学学习方法及解题指导》
王俊民 编 徐秉业 编 同济大学出版社 机械工业出版社
《弹性与塑性力学》(例题与习题)
工程力学 第7章 简单的弹性静力学问题

第 7 章 简单的弹性静力学问题
§7-1 杆件在轴向载荷作用下的内力与应力
7-1-1 横截面上的内力与应力
当外力沿着杆件的轴线作用时,其横截面上只有轴力一个内力分量。与轴力相对应,杆 件横截面上将只有正应力。 在很多情形下,杆件在轴力作用下产生均匀的伸长或缩短变形,因此,根据材料均匀性 的假定,杆件横截面上的应力均匀分布,如图 7-1 所示。
图 7-3 拉杆斜截面上的应力
σ θ=
FN FP cosθ = = σ x cos 2θ Aθ A θ
F sin θ 1 τθ= = P = σ xsin (2θ ) Aθ Aθ 2 FQ
(7-3)
其中, σ x 为杆横截面上的正应力,由式(7-1)确定。A ? 为斜截面面积
Aθ= A cosθ
上述结果也可以通过考察杆件上的微元而求得。 如图 7-4a 所示, 以相距很近的两横截 面和两纵截面从杆内截取微小单元体,简称微元。所取微元只有左、右面上受有正应力 σ x 。
FNx1=400 kN
FNx 2=-100kN
FN x3=200 kN
进而,求得各段横截面上的正应力分别为: AB 段:
σ x1 =
FNx1 400 × 10 3 = = 160 × 10 6 Pa = 160 MPa −6 A1 2500 × 10
FNx2 -100 × 10 3 = = -40 ×10 6 Pa = -40MPa −6 A2 2500 × 10
§ 7-7 强度失效与失效控制
7-7-1 失效的概念 7-7-2 拉伸和压缩杆件的失效判据 7-7-3 拉伸和压缩杆件的设计准则
§ 7-8 杆件在轴向载荷作用下的强度计算过程 与算例
7-8-1 三类强度问题 7-8-2 强度计算过程 7-8-3 拉伸、压缩构件强度设计算例
弹性力学05变分原理及其应用
U 0
xy
y
U 0
y
yz
U 0
yz
z
U 0
z
xzLeabharlann U 0xz线弹性问题的变形能
U0
1 2
( x x
y y
z z
xy
xy
yz
yz
xz
xz )
U0
1 2
ij
ij
注意:变形能为 U U0d
V
弹性体体积 ,表面积为S。
位移给定表面Su 面力给定表面S
位移边界 面力边界
S =Su+ S
虚应变,外力在虚位移上所做的虚功,等于真实应力分量在
对应的虚应变上所做的虚功,即虚应变能。
2、功的互等定理
Fb1iui2d Fs1iui2dS
Fb2iui1d Fsi2ui1dS
V
S
V
S
作用于弹性体的第一种状态外力,包括体力 和面力,在第二种状态对应的位移上所做的 功等于第二种状态的外力在第一种状态对应 的位移上所做的功。
u u0 Amum
m
v v0 Bmvm
m
w w0 Cm wm
m
其中u0,v0,w0 为设定的函数,在边界上的值等于 边界上的已知位移;um,vm,wm为边界值等于零的
设定函数,Am,Bm,Cm为待定的系数,位移的
变分由它们的变分来实现。
δu umδAm
m
δv vm δBm
m
δw wmδCm
m
应变能的变分为
δU
U
(
Am
δAm
U Bm
δBm
U Cm
δCm )
外力势能的变分为
δV
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轴对称问题
§7-5 轴对称问题的基本方程
空间轴对称问题 如果弹性体的几何形状,约束情况和所 受的外力都为轴对称,则应力,形变和位 移也是轴对称的。
采用柱坐标 ( , , z ) 表示。
轴对称问题
对于空间轴对称问题:
所有物理量仅为(ρ,z)的函数。
应力中只有 σ ,σ ,σ z , z , z 0;
σ 1 , σ 2 , σ 3 (证明见书上)。
5.应力不变量
应力不变量
若从式(c) 求出三个主应力 σ1,σ 2 ,σ3 ,
则式(c)也可以用根式方程表示为,
(σ σ1)(σ σ2 )(σ3 σ ) 0 .
(f )
因式(c) 和( f )是等价的方程,故 σ 的各
幂次系数应相等,从而得出:
则可将微分四面体移动到边界点上,并使斜 面与边界重合。斜面应力分量 ( px , py , pz ) 应 代之为面力分量 ( f x , f y , f z ) ,从而得出空间 问题的应力边界条件:
(lσx myx nzx)s fx , (x, y, z) . (在Sσ上) (d)
注意:
式(b), (c) 用于V内任一点,表示斜面应 力与坐标面应力之间的关系;
u , v , w ,则空间问题的位移边界条件
为:
(u )s u , (u,v, w).
(c)
体积应变
体积应变定义为:
d v dv
dv
(d x x d x)(d y y d y )(d z z d z ) d xd yd z
dxd ydz
(1x)(1y)(1z)1
x y z.
(d)
εx
1 E
(σ
x
σ
y
σz
)0,
εy
1 E
(σ
y
σ
x
σz
)0,
则可解出:
σ
x
σ
y
1
σ
z
1
q.
例题2
图示的弹性体为 一长柱形体,在顶面 z=0 上有一集中力 F 作用于角点,试写出 z=0 表面上的边界条 件。
aa
P
b
o
b
x
y
z
图7-5
解:本题是空间问题,z=0 的表面是小边 界,可以应用圣维南原理列出应力的边界 条件。即在z=0的表面边界上,使应力的主 矢量和主矩,分别等于面力的主矢量和主 矩,两者数值相等,方向一致。
xy xz
yx
σ y σ
yz
zx zy 0,
σz σ
展开,即得求主应力的方程,
σ3 (σx σy σz)σ2 (σyσz σzσx σxσy y2z z2x x2y)σ (σxσyσz σxy2z σyz2xσzx2y2yzzxxy)0. ( c )
应力主向
3.应力主向
设主应力 σ1 的主向为 l1, m1, n1。代入式 (a)中的前两式,整理后得
由
p
2
p
2 x
p
2 y
p2 zσ源自2 n2 n,
得
2 n
p
2 x
p
2 y
p
2 z
σ
2 n
.
(c)
n n
从式(b)、(c )可见, 当六个坐标面上的 应力分量确定之后,任一斜面上的应力也 就完全确定了。
应力边界条件
3. 在 sσ 上的应力边界条件
设在 sσ 边界上,给定了面力分量 fx, f y , fz ,
形变中只有 , , z , z , z 0; (a)
位移中只有 u ,uz ,
u 0。
平衡微分方程:
F 0, FZ 0,
σ
z
z
σ
σ
f
0,
σz z
z
z
fz
0.
(b)
而由 F 0, 得出为 σ σ。
几何方程:
其中 u 0, z 0, 几何方程为
面(法线为 n )上的应力。
斜面应力
斜面的全应力p 可表示为两种分量形式: p沿坐标向分量:
p ( px , py , pz ). p沿法向和切向分量:
p (σn , n ).
1. 求 p ( px , py , pz )
px py pz
取出如图的包含斜面
的微分四面体,斜面面积 为ds, 则x面,y面和z面的 面积分别为lds,mds,nds。
函数。若
x
yz
0
( x,
y, z),还存在对应的位
移分量,为:
u u0 yz z y,
(x, y, z;u,v, w). (b)
u 0 , v 0 , w 0 --沿x , y , z 向的刚体平移;
x , y , z --绕x , y , z轴的刚体转动。
位移边界条件
若在 su 边界上给定了约束位移分量
yx
m1 l1
zx
n1 l1
(σx
σ1)
0,
(d)
(σ y
σ1)
m1 l1
zy
n1 l1
xy
0.
应力主向
由上两式解出
m1 l1
,
n1 l1
。然后由式(b)得出
l1
1
.
1 ( m1 ) 2 ( n1 ) 2
(e)
l1
l1
再求出 m1 及 n1 。
4. 一点至少存在着三个互相垂直的主应力
第七章 空间问题的基本理论
目录
§7-1 平衡微分方程 §7-2 物体内任一点的应力状态 §7-3 主应力 最大与最小应力 §7-4 几何方程及物理方程 §7-5 轴对称问题的基本方程
在空间问题中,应力、形变和位移等基 本知函数共有15个,且均为x,y,z的函数。
空间问题的基本方程,边界条件,以 及按位移求解和按应力求解的方法,都是 与平面问题相似的。因此,许多问题可以 从平面问题推广得到。
应力不变量
Θ1
σ1
σ2
σ3
σx
σy
σz
,
Θ2 σ1σ 2 σ 2σ3 σ3σ1 σ yσ z
Θ3
σzσx
σxσ y
τ
2 yz
τ
2 zx
τ
2 xy
,
σ1σ 2σ3 σ xσ yσ z
(g)
σ
x
τ
2 yz
σ
y
τ
2 zx
σ
z
τ
2 xy
2τ yz τ zx τ xy .
式(g)中的各式,左边是不随坐标选择 而变的;而右边各项虽与坐标的选择有 关,但其和也应与坐标选择无关。
求主应力
2. 求主应力 σ 将式(a)改写为:
(σ x
xy l
σ )l yx m
(σ y σ)m
zx zy
n n
0, 0,
xzl yz m (σ z σ )n0。
求主应力
上式是求解 l , m , n 的齐次代数方程。由于l , m , n不全为0,所以其系数行列式必须为零,得
σx σ
其中由于小变形假定,略去了形变的2、3次幂。
物理方程
空间问题的物理方程
可表示为两种形式: ⑴ 应变用应力表示,用于按应力求解方法:
x E1(σx σy σz),
yz
2(1 E
)
yz ,
( x ,y ,z ). (e)
⑵ 应力用应变表示,用于按位移求解方法:
x
E
1
(12
x
),
yz
E
(1 )
由四面体的平衡条件 Fx 0( x, y, z) ,
得出坐标向的应力分量,
px lσx m yx n zx , (x, y, z). (a)
n n
2. 求 p (σ n , n ) 将 p ( px , py , pz ) 向法向 n 投影,即得
σ n lp x mp y np z l2σx m2σy n2σz 2mn yz 2nl zx 2lm xy . (b)
代入 p x , p y , p z , 得到:
lσ x m yx n zx lσ ,
m σ y n zy l xy m σ ,
(a )
nσ z
l xz
m yz
nσ.
考虑方向余弦关系式,有
l 2 m2 n2 1.
(b)
结论:式(a) , (b)是求主应力及其方 向余弦的方程。
x
u x
,
(x, y, z;u,v,w)
(a)
yz
w y
v z
,
(x, y, z;u,v,w)
几何方程
从几何方程同样可得出形变与位移 之间的关系:
⑴ 若位移确定,则形变完全确定。 从数学上看,由位移函数求导数是
完全确定的,故形变完全确定。
几何方程
⑵ 若形变确定,则位移不完全确定。
由形变求位移,要通过积分,会出现待定的
式(d)只用于 sσ边界点上,表示边界面
上的面力与坐标面的应力之间的关系,所 以必须将边界面方程代入式(d)。
斜面应力
§7-3 主应力 最大与最小的应力 1.假设 n 面(l , m , n)为主面,则此斜面上
n 0 , p σn σ. 斜面上沿坐标向的应力分量为:
p x l , p y m , p z n .
所以分别称 Θ1 ,Θ 2 ,Θ 3 为第一、二、 三应力不变量。这些不变量常用于塑性力 学之中。
一点应力状态
6.关于一点应力状态的结论:
(1)6个坐标面上的应力分量完全确定一点 的应力状态。只要6个坐标面上的应力 分量确定了,则通过此点的任何面上的 应力也完全确定并可求出。