超驰控制
超驰控制在和利时MACS-K中的应用
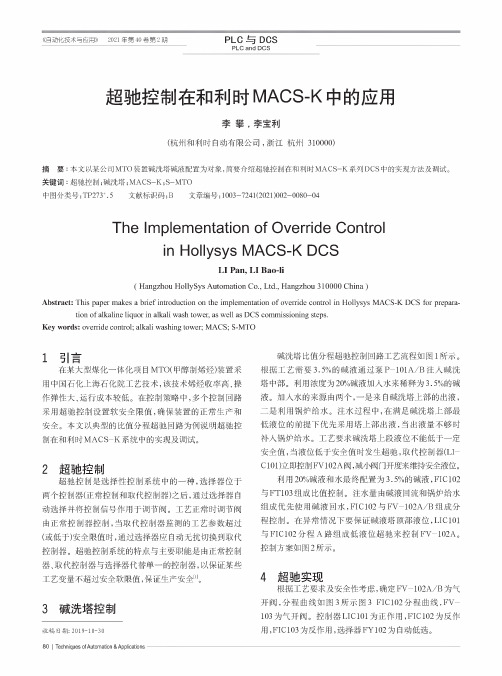
超驰控制在和利时MACS-K中的应用李攀,李宝利(杭州和利时自动有限公司,浙江杭州310000)摘要:本文以某公司MTO装置碱洗塔碱液配置为对象,简要介绍超驰控制在和利时MACS-K系列DCS中的实现方法及调试。
关键词:超驰控制;碱洗塔;MACS-K;S-MTO中图分类号:TP273+.5文献标识码:B文章编号:1003-7241(2021)002-0080-04The Implementation of Override Controlin Hollysys MACS-K DCSLI Pan,LI Bao-li(Hangzhou HollySys Automation Co.,Ltd.,Hangzhou310000China)Abstract:This paper makes a brief introduction on the implementation of override control in Hollysys MACS-K DCS for preparation of alkaline liquor in alkali wash tower,as well as DCS commissioning steps.Key words:override control;alkali washing tower;MACS;S-MTO1引言在某大型煤化一体化项目MTO(甲醇制烯烃)装置采用中国石化上海石化院工艺技术,该技术烯烃收率高、操作弹性大、运行成本较低。
在控制策略中,多个控制回路采用超驰控制设置软安全限值,确保装置的正常生产和安全。
本文以典型的比值分程超驰回路为例说明超驰控制在和利时M A CS-K系统中的实现及调试。
2超驰控制超驰控制是选择性控制系统中的一种,选择器位于两个控制器(正常控制和取代控制器)之后,通过选择器自动选择并将控制信号作用于调节阀。
工艺正常时调节阀由正常控制器控制,当取代控制器监测的工艺参数超过(或低于)安全限值时,通过选择器应自动无扰切换到取代控制器。
超驰控制

超驰控制(overrides)又叫取代控制也称选择性控制系统,它的特点是:在正常工况下,该参数不会超限,所以也不考虑对它进行直接控制;而在非常工况下,该参数会达到极限值,这时又要求采取强有力的控制手段,避免超限。
选择性控制属于极限控制一类。
例如,正常情况下,高加疏水门由高加水位调节装置进行调节,控制高加水位,但当高加水位高二值保护动作后,自动联动全开高加疏水门,保证高加水位不超限,此时,高加疏水门不受高加水位调节装置的控制,这种控制就叫超驰控制,此时保护系统取代了调节系统的左右,作为执行机构的设备听从了保护系统的命令,而不受调节系统的命令,相当于越级指挥一样,越过了中间一个控制环节所谓超驰控制就是当自动控制系统接到事故报警、偏差越限、故障等异常信号时,超驰逻辑将根据事故发生的原因立即执行自动切手动、优先增、优先减、禁止增、禁止减等逻辑功能,将系统转换到预设定好的安全状态,并发出报警信号。
以往用常规控制仪表构成的控制系统绝大部分都缺少识别系统内、外设备状态品质的能力。
只要输入端有偏差信号存在,控制器就会有相应的动作,而不管系统内部是否出现问题或外部生产设备工作是否异常,有时甚至会出现控制背离给定值的现象而造成事故。
超驰控制则能有效地抑制上述不良后果。
对内,它是监视自动控制过程的眼睛,随时检测控制回路中变送器信号的品质、输入输出偏差限值等。
如果是控制仪表本身出现问题,控制回路就失去了自动控制的基础条件、超驰控制将选择自动切手动方式把控制回路自动转为手动;对外,它是系统的安全转折器,若自动控制仪表一切正常,主、辅设备或各种自动控制系统之间的运行状态产生异动,超驰控制将根据判定逻辑得出的结果,决定自动控制系统的控制策略或运行方向,从而转入安全通道,脱离可能发生的危险工况。
DCS和FCS都设计有超驰控制功能,但它在我国工业生产过程自动控制的实际应用却不多。
随着DCS和FCS应用的深入,超驰控制的功能将会得到人们的重视,超驰控制的技术也将走向成熟,到那时,超驰控制就会成为自动控制系统中不可缺少的组成部分。
选择性控制系统
立即发挥控制作用。所以必须采取抗积分饱和措施。
采用PI-P调节器
P 控制 ——系统处于开环工作状态
PI控制——系统处于闭环工作状态
结束!
一.选择性控制系统概述
选择性控制又叫取代控制,也称超驰控制。 在大型生产工艺过程中,除了要求控制系统在生产 处于正常运行情况下能够克服外界干扰,维持生产的平 稳运行,当生产操作达到安全极限时,控制系统应有一 种应变能力,能采取一些相应的保护措施,促使生产操 作离开安全极限,返回到正常情况;或是使生产暂时停 下来,以防事故的发生或进一步扩大。
3.混合型选择性控制系统
混合型选择性控制系统中,既包含有开关型选择的内容, 又包含有连续型选择的内容。
锅炉燃烧系统选择性控制系统(防脱火、防回火)
三 选择性控制系统的设计
1.调节阀开、闭形式选择 根据生产安全要求选择调节阀的开、闭形式 2.调节器规律及正、反作用选择 根据对象的特性和控制的要求,选择调节器的控制规律 及正、反作用 3. 选择器类型的选择 根据调节器的正、反作用和选择性控制系统设置的目的,
确定选择器的类型
控制规律选择:
1.正常情况下工作的控制器,应选PI或PID 2. 非正常情况工作的控制器,应选窄比例式(KC很大) 选择器类型的选择: 根据生产处于不正常情况下、非正常情况调节器的输出 信号高、低来确定;如果在这种情况下它的输出为高信号, 则应选高选器;如果在这种情况下它的输出为低信号,则应 选低选器。
四 积分饱和及其防止措施
在选择性控制系统中,某一时刻选择器只能选中两个调节器
中的一个,并将该调节器的输出信号送往执行器,而未被选
中的调节器则处于开环工作状态,如果这个调节器具有积分 作用,且在偏差信号长期存在的条件下,就会产生积分饱和 现象,其输出信号将会达到最大或最小的极限值。此时,如 果它重新被选择器选中,需要对系统进行控制时,则并不能
超驰控制在万吨锂盐重溶解釜上的应用

科技风2017年12月机械化工DOI:10.19392/ki.1671-7341.201726122超驰控制在万吨锂盐重溶解釜上的应用胡敬江西赣锋锂业股份有限公司江西新余338004摘要:氢氧化锂重结晶工序,重溶解釜是主要设备。
为了在控制重溶解釜内温度的同时,还控制夹套的压力,保证重溶解夹 套在设计压力以内,因此采用了超驰控制。
关健词:超驰控制;低选器;DCS$和利时氢氧化锂重结晶工序,是对氢氧化锂车间产出的工业级氢氧化锂进行提纯,生产电池级氢氧化锂。
整个装置采用和利时 DC7系统,接收现场仪表的信号,并监控整个生产过程。
生产过程中,用0.7MPa蒸汽,通过夹套对重溶解釜内物料进行加 热;而重溶解釜夹套设计压力为0.4MPa,在控制重溶解釜内温度的同时,为了控制夹套的压力,保证重溶解夹套在设计压力以内,采用了超驰控制。
1超驰控制系统简介超驰控制([x rid x)又称取代控制,也称选择性控制系统;它的特点是:正常工况时,该参数不会超限,所以不考虑对它进行直接控制;而在非工况时,该参数会达到极限值,这又要求采取强有力的控制手段来避免超限。
当控制系统接收到事故报警、偏差越限、故障灯异常信号时,超驰控制逻辑将根据事故发生原因立即执行自动切手动、优先增、优先减、禁止增、禁止减等逻辑功能,将系统转换到预定好的安全状态,并发出报警信号。
2超驰控制系统的设计a. 控制阀开闭形式选择:为保证氢氧化锂重结晶溶解釜夹 套的安全要求并结合实际工艺,此次选择的阀门TV5101为气开式的调节阀。
b. 控制规律的选择:正常情况下时使用温度控制器应选PID;非正常情况时应选择压力控制器且应选窄比例式(Kc很大)。
c根据氢氧化锂重结晶溶解釜的特性和控制要求,控制器的正反作用选择如下:压力调节器选反作用式,当夹套压力高于设定值时减小阀门开度;温度调节器选反作用式,当溶解釜内温度高于设定值时减小阀门开度,温度高于设定值时增加阀门开度。
超驰控制在DCS系统中的实现及应用

对于横河 CENTUM VP 系统,要使控制回路具有抗积分饱 和功能,可以使用 2 种方法实现。一是选用普通的选择器,将选 择器的最终输出直接反写给未被选择的控制器输出;二是选择 标准的自动选择模块实现。根据图 1 所示工艺流程,应实现自 动低选功能。
图 1 回路图
3.1 选用普通的选择器 在横河公司 CENTUM VP 组态环境中,“CALCU”选择输出
[3] 吴卫,石绍军. 变压吸附制氮技术及其设备选型[J]. 化工 技术与开发,2010,39(12): 56~58.
[4] 陈顺杭. PSA 变压吸附制氮技术与低温法制氮技术比较 [J]. 现代化工,2013,33(2): 76~78.
[5] 李化治. 制氧技术[M]. 冶金工业出版社,2009. [6] 孟繁强,胡缜磊,唐彬,孙涛,高媛. 高纯氮气管道工程的施 工技术[J]. 管道技术与设备, 2013, (3): 18~19.
1超驰控制的原理及作用超驰控制是把生产过程中的限制条件所构成的逻辑关系叠加到正常的自动控制系统上去的一种组合控制方法也就是系统中设有两个或两个以上的控制器通过高低值选择器选出能适应生产安全状况的控制信号实现对生产过程的自控控制
施工应用
超驰控制在 DCS 系统中的实现及应用
高宁 延海波(陕西延长中煤榆林能源化工有限责任公司,陕西 靖边 718500)
缺点: a 主要优点:一次投资较少;设备维护量小;操作简单;周边
地区液氮供应有保ቤተ መጻሕፍቲ ባይዱ。 b 主要缺点:由于洞库置换操作时氮气消耗量较大,一天需
要液氮 150m3,按液氮槽车容积 30m3计算,一天需要消耗 5 车液 氮。调度工作繁重,液氮调运不及时将会影响洞库的运行。
3 方案比较
自制氮气(变压吸附制氮)方案与依托某大型空分装置外 购氮气方案(管道敷设输送和购买液氮汽化)对比见表 4。
超驰控制

超驰控制系统1.超驰控制概念所谓超驰控制就是当自动控制系统接到事故报警、偏差越限、故障等异常信号时,通过超驰逻辑将根据事故发生的原因立即执行自动切手动、优先增、优先减、禁止增、禁止减等逻辑功能,将系统转换到预设定好的安全状态,并发出报警信号。
2.原理以往用常规控制仪表构成的控制系统绝大部分都缺少识别系统内、外设备状态品质的能力。
只要输入端有偏差信号存在,控制器就会有相应的动作,而不管系统内部是否出现问题或外部生产设备工作是否异常,有时甚至会出现控制背离给定值的现象而造成事故。
超驰控制则能有效地抑制上述不良后果。
在系统中,监测控制过程的每一参数变化的品质、识别输入输出偏差限值、趋势,对被调参数影响的程度,然后依据逻辑功能,实施优选优先,对执行机构进行控制。
DCS和FCS都设计有超驰控制功能,但它在我国工业生产过程自动控制的实际应用却不多。
随着DCS和FCS应用的深入,超驰控制的功能将会得到人们的重视,超驰控制的技术也将走向成熟,到那时,超驰控制就会成为自动控制系统中不可缺少的组成部分。
3.分类超驰控制系统依照功能可分为三类1)开关型超驰控制系统开关型超驰控制系统一般是在主路控制器到调节阀门间设置一个电磁阀门,由辅路超驰信号控制电磁阀门。
当超驰信号送过来的时候,电磁阀门断开。
主路调节阀门由于失气或失电,调节阀门自动向预先设定的FC或FO动作。
也就是说,当超驰信号出现的时候。
调节阀门的最终动作要么是全开要么是全关,此时调节阀门不会动态的进行调节。
2)连续型超驰控制系统连续型超驰控制是将开关型超驰控制系统中的电磁阀门换成了一个选择性控制器。
该选择型控制器可以预先设定为优先选择信号高的或者是信号低的一侧信号,也就是说,主路控制信号和超驰控制信号始终都是通向该选择器的。
例如该选择器为一个高选择器,那么正常的时候,超驰信号低于主路控制信号,当超驰发生的时候,超驰信号会高于主路控制信号,选择器就选择超驰信号。
注:参考压缩机防喘振控制3)混合型超驰控制系统在控制系统中同时有开关型和连续型超驰控制系统。
分散控制系统中的超驰控制
分散控制系统中的超驰控制姚金环(湛江发电厂,广西 湛江 524099)中图分类号:K32 文献标识码:B 文章编号:100129529(2000)0320054201 近年来,新建大型火力发电机组全面应用计算机分散控制系统(DCS)逐步形成热工自动调节装置的主流。
因DCS系统的应用促使超驰控制(overriding con tro l)技术走向成熟,有效地提高了自动调节系统和机组长期运行的安全性。
自动控制系统一般分为过程调节和顺序控制,超驰控制是过程调节中响应系统异常、切换控制方式的保护功能,由于早期自动控制设备性能方面尚不尽如人意,该项技术只能束之高阁,DCS 令超驰控制变为现实——成为过程调节系统不可缺少的重要组成部分。
所谓超驰控制就是当自动调节系统接到事故报警、偏差越限、故障等异常情况时,超驰逻辑(override logic)将根据事件发生的原因立即执行:M R E——自动切手动;PRA——优先增;PLW——优先减;RA I——禁止增;LW I——禁止减。
等逻辑功能直接转换当前工作模式或调节被控设备,把系统转到预先设定好的安全状态并发出报警信号。
电厂中的过程调节都是以闭环负反馈的形式构成回路,调节的目的是消除输入偏差,始终保持过程值(PV)在允许的范围内等于给定值(SP)。
机组运行中大约有几十个过程调节回路、保护装置和程序控制并行参与调节,每个调节回路包括产生输入信号的变送器,输出指令控制的执行机构以及调节器本身,任何环节出现故障都会使调节系统偏离正确的调节方向或驱使调节幅度发散。
以往用常规控制装置构成的调节系统绝大部分都缺少识别系统内、外设备状态品质的能力,只要输入端有偏差信号存在,调节器就会有相应的动作,而不管系统内部是否出现问题或外部设备异常,有时甚至会出现调节背离定值的现象而造成事故,这也是影响自动投入率提高的原因之一。
超驰控制则能有效抑制上述不良后果。
对内,它是监察自动调节过程的眼睛,随时检测调节回路中变送器信号的品质、输入 输出偏差限值等。
超驰控制
超驰控制沈阳电力高等专科学校杨庆柏刊载于《辽宁电机工程科普》2000年第5期自动控制系统一般分为连续量(模拟量)和断续量(开关量)两大类型控制系统。
超驰控制是自动控制系统的保护措施,应归属于断续量控制系统。
一、超驰控制所谓超驰控制就是当自动控制系统接到事故报警、偏差越限、故障等异常信号时。
超驰逻辑将根据事故发生的原因,立即执行自动切手动、优先增、优先减、禁止增、禁止减等逻辑功能,直接转换当前系统的控制方式,将系统转到预先设定好的安全状态,并发出报警信号。
火电厂中的连续量控制都是以闭环负反馈的形式构成回路,控制的目的是消除输入偏差,始终保持被控量在允许的范围内等于给定值。
机组运行中大约有几十个控制回路,任何环节出现故障都会使控制系统偏离正确的控制方向或驱使控制系统振荡。
以往用常规控制仪表构成的控制系统,绝大部分都缺少识别系统内、外设备状态品质的能力。
只要输入端有偏差信号存在,控制器就会有相应的动作。
而不管系统内部是否出现问题或外部设备是否工作异常,有时甚至会出现控制偏离给定值的现象而造成事故,这都是影响提高自动投入率的原因之一。
超驰控制则能有效地抑制上述不良后果。
对内它是监视自动控制过程的眼睛,随时都在检测自动控制回路中变送器信号的品质、输入和输出偏差限值等。
如果是控制仪表本身出现问题,显然控制回路失去了自动控制的基础条件,超驰控制将选择自动切手动方式,把控制回路的自动工作模式转到手动工作模式;对外它是自动控制系统的安全转折器,若控制仪表一切正常,被控制的主、辅设备发生异常,超驰控制将根据判定逻辑得出的结果,决定自动控制系统的控制策略或运行方向,从而转入安全通道,脱离可能发生的危险。
二、超驰控制应用300MVW机组引风控制系统的被控量取自锅炉炉膛压力(即炉膛负压),锅炉炉膛压力的反应速度相当快,是影响锅炉安全运行的重要参数。
在引风控制系统投入运行时,要充分考虑到如何保证在自动或手动方式下锅炉的安全运行。
T2102碱洗塔顶液位超驰控制碱液锅炉水比值控制水阀分程控制 (2)

T2102碱洗塔顶液位超驰控制碱液锅炉水比值控制水阀分程控制工艺说明:从T2101水洗塔顶部来的反应气,经10E2104换热器加热到50°C 左右,进入T2102碱洗水洗塔下部。
反应气从T2102下部进,经稀碱液(2~3%)、中碱液(5~7%)、浓碱液(8~10%)、锅炉水洗后,过除沫网从T2102顶部流出。
在T2102内反应气里的酸性气体(如CO 2等)与碱液发生反应生成盐和水,同时放出热量oT2102顶部水洗部分有一个液位超驰控制LC2110,主要防止液位太低,反应气从水洗底部排水管流出一--防“串气”•同时防P2106AB 泵气蚀;P2102AB 碱液泵出口流量控制FC2107,流量调节器输出控制电气变频器,改变电机转速,从而改变碱液泵出口流量,实现泵出口流量控制;新鲜锅炉水流量控制阀与□D H FY LC2110 LJFCRFC M 2107PVR FCLM P2102,FV-2106B FV-2106A FC20%碱液T-2102碱洗/水洗塔 水洗水循环至P-2106A,B 强碱至P-2105A,B锅炉给水自E-2107 宀2106 2106 2107FFCOPSPLIT—2107 SPLIT-塔底部分排出洗涤水流量控制阀的分程控制,其原则是优先考虑塔底部分排出水流量,如果此流量不能满足配8%~10%的浓碱液所需水量,再逐步增加新鲜锅炉水流量,因此两流量控制阀FV2106A\FV2106B为分程控制;20%的碱液流量与总锅炉水流量之间为比值控制。
复杂回路构成说明:整个复杂回路由三个调节器(LC2110\FC2106\FC2107),两个调节阀(FV2106A\FV2106B),两个变频器及两台泵,两个质量流量计(FT2106\FT2107),—台液位变送器(LT2110)组成。
LC2110为正作用;FC2106为反作用;FC2107为反作用。
FT2107、FC2107和变频器及电机泵组成碱液流量控制回路;FT2106、FC2106、FV2106A\FV2106B组成锅炉水流量控制回路。
超驰控制

串级调节在简单调节回路中,选取干扰影响特别明显的一个中间变量,附加一个调节器,组成内调节回路(或副调节回路),用来初步克服干扰的影响,同时用原回路(称主回路)中的调节器(主调节器)的输出作为副调节器的给定值,使副调节器跟随此值达到进一步的精细调节。
这是用一个内回路对主要干扰影响进行初调的控制系统。
例如:一个用蒸汽加热控制对象的温度调节,往往由于各用汽设备负荷变化而使蒸汽流量波动极大,影响温度的正常调节。
为了克服这个问题,可以取加热蒸汽的压力作为中间变量 , 组成一个内回路 , 然后以被调节温度的信号与规定温度值之差送至主调节器,最后将主调节器的输出作为压力调节器的给定值。
串级调节的质量往往比简单调节更好,但使用不当则将适得其反。
前馈调节干扰较大且可测时 , 可在干扰出现时 , 测取其信号,经前馈调节器修正后,送作反馈调节器的给定值,使其在调节过程中,能够在干扰影响被调节量之前,先行采取克服的措施。
因此,前馈调节也称超前调节。
例如:精馏塔进料量的改变对产品质量影响很大 , 但因滞后大,若等影响到产品质量后 , 再反馈至调节器进行调节 , 则调节措施很不及时 , 调节效果差。
如果采用前馈调节,就可以有效地克服精馏塔进料量对产品质量的影响。
前馈调节器中的静态修正部分,是按物料或能量平衡,把干扰量换算至所需的调节量。
动态修正部分则是按所需调节措施的缓急而定。
均匀调节生产中常有前一设备的产品直接用作后续设备的进料,此物质的流量必须同时满足前后两个设备的生产要求。
前者希望生产多少 , 流出多少 ; 后者则要求进料平稳。
两个要求是矛盾的。
均匀调节是解决这一矛盾的措施 , 调节结果使流量尽量不变,或缓慢变化 , 只有在危及各设备的安全生产时,才采取极端的措施。
调节系统多为串级形式,而调节器多为宽比例(放大倍数较小)的比例调节器。
分程调节在需用不同的手段分阶段地控制一个参数时,采用这种调节。
例如 : 一个反应器的温度调节 , 在正常温度范围内用水冷却即可,但温度达高限后需用冷冻水冷却,低于低限时,需用蒸汽加热,方能保持正常反应。
基于超驰-分程控制的加氢装置反应系统压力复杂控制方案
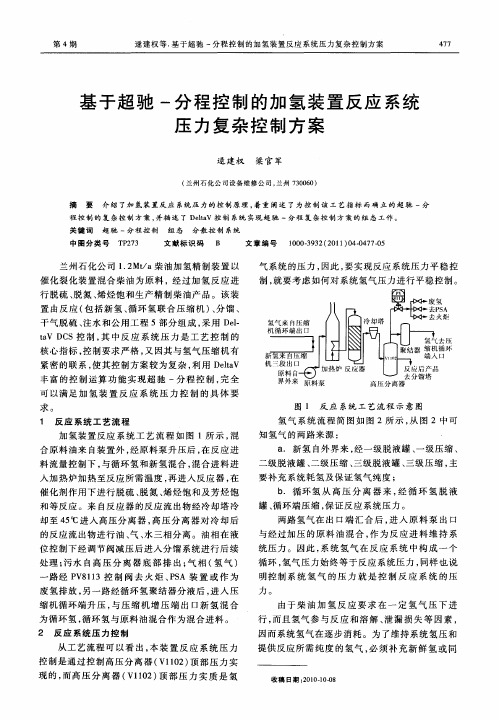
力。
路经 P 8 1 V 13控 制 阀 去 火 炬 、 S 装 置 或 作 为 PA
废 氢排 放 , 一路 经循 环 氢聚结 器 分液后 , 人 压 另 进
缩机 循 环端 升 压 , 压缩 机 增 压 端 出 口新 氢 混 合 与
可 以满足 加 氢 装 置 反 应 系 统 压 力 控 制 的 具 体 要
求。
1 反 应 系统 工 艺 流 程
臬
~~
一 噍 U
,
图 1 反 应 系统 工 艺 流 程 示 意 图
氢 气 系 统 流程 简 图 如 图 2所 示 , 图 2中可 从
知氢 气 的两路 来 源 :
加氢装 置 反应 系 统 工 艺 流 程 如 图 1所 示 , 混 合 原料 油来 自装 置外 , 原料 泵升 压后 , 反应 进 经 在 料 流量 控制 下 , 与循 环氢 和新 氢混 合 , 混合 进料 进
入 加 热炉加 热 至反应 所需 温 度 , 进入 反应 器 , 再 在
a .新 氢 自外界 来 , 经一 级脱 液罐 、 级压缩 、 一 二级脱 液 罐 、 级 压缩 、 二 三级 脱液 罐 、 三级 压缩 , 主 要补 充 系统耗 氢及 保证 氢气 纯 度 ; b .循 环 氢 从 高 压 分 离 器 来 , 循 环 氢 脱 液 经 罐 、 环 端压 缩 , 证 反应 系统压 力 。 循 保 两路 氢气 在 出 口端 汇 合 后 , 入 原料 泵 出 口 进
与经 过加 压 的原 料 油 混 合 , 为 反 应 进 料维 持 系 作
统压 力 。因此 , 统 氢 气 在 反应 系 统 中构 成 一 个 系
催化裂化装置操作工(高级及技师)复习题与答案

催化裂化装置操作工(高级及技师)复习题与答案1、为了防止再生器超压,可以对()设定为超驰控制。
A、烟机进口蝶阀B、双动滑阀C、再生单动滑阀D、烟机旁路蝶阀答案:B2、装置停电反应岗位应控制好反再两器压力,防止相互压空两器藏量()。
A、迅速切断两器皿B、器改单器流化C、尽可能维持两器催化剂循环D、再生器闷床答案:C3、装置停非净化风时,对于使用非净化风的松动点,正确处理方法是()。
A、关正线,开副线B、正副线均关闭C、正副线都开D、改用备用介质松动答案:D4、下列选项中,能够反映两器热平衡结果的是()。
A、烟气氧含量B、催化剂活性C、反应温度D、再生温度答案:D5、汽轮机在启动前,由于蒸汽会凝结成水,凝结水如不排出,()会把水夹带到汽缸内把叶片打坏A、高速的气流B、高速的叶轮C、低速的气流D、低速的叶轮答案:A6、催化裂化分馆塔进料来自()。
A、反应器B、再生器C、原料油泵D、循环油浆泵答案:A7、CO焚烧炉的作用不包括是()。
A、回收CO化学能B、减少环境污染C、发生蒸汽D、提高原料预热温度答案:D8、将旋风分离器人口的颗粒进行筛分分析,然后再将回收的颗粒进行分析,它们之间的比值称为旋风器的()。
A、总效率B、回收效率C、等级效率D、组成效率答案:D9、通过汽轮机电动脱扣装置可以实现()紧急停车操作。
A、就地B、就地控制盒C、操作室遥控D、操作室自动答案:C10、分子筛是催化剂()的主要来源,基质往往也有部分裂化性能。
A、活性B、选择性C、稳定性D、耐磨性答案:A11、轻油系统水洗时,应注意水必须()。
A、上进上出B、上进下出C、下进下出D、下进上出答案:D12、待生线路催化剂架桥的现象是()。
A、汽提段藏量上升,再生器藏量上升B、汽提段藏量上升,再生器藏量下降C、汽提段藏量下降,再生器藏量上升D、汽提段藏量下降,再生器藏量下降答案:B13、汽轮机()的作用是把蒸汽的热能转变为高速气流的动能。
A、喷嘴B、转子C、汽封D、汽缸答案:A14、催化余热锅炉目前采用较多的除灰方法是()。
S7-1200 运动控制指令之间Override(超驰)功能说明

S7-1200 运动控制指令之间Override(超驰)功能说明S7-1200 运动控制指令之间存在相互覆盖和中止的情况。
在S7-1200 PLC中这种特性叫做Override,中文叫做“超驰”。
基本上除了MC_Power指令,每种指令都有被Override的情况,就是说用户可以用新的指令覆盖正在执行的命令以中止当前动作切换到新的命令的执行。
用两个MC_MoveRelative为例进行说明,如下图所示,除了在程序里调用了MC_Power指令和MC_Reset之外,还调用了两个MC_MoveRelative指令。
第一个MC_MoveRelative指令的Distance = 1000.0mm,Velocity = 50.0mm/s;第二个MC_MoveRelative指令的Distance = 500.0mm,Velocity = 30.0mm/s。
情况①,当第一个MC_MoveRelative指令执行完时触发第二个MC_MoveRelative指令;情况②,在第一个MC_MoveRelative指令执行过程中触发第二个MC_MoveRelative指令。
如下图所示,情况①时,第一个MC_MoveRelative指令让轴移动到了A点,触发第二个MC_MoveRelative指令后,轴在A点的基础上以30.0mm/s的速度移动了500.0mm的距离。
情况②,在第一个MC_MoveRelative指令执行过程中立即触发了第二个MC_MoveRelative指令,轴从A'点的位置立即以二个MC_MoveRelative指令的参数运行,轴从当前的50.0mm/s的速度以减速度降到30.0mm/s,在A'的基础上运行了500.0mm的距离达到B'点。
『结论』以MC_MoveRelative指令为例说明Override的特点•可以用第二个MC_MoveRelative指令覆盖第一个MC_MoveRelative指令•可以用其他的指令,比如MC_MoveJog、MC_Home,MC_MoveAbsolute,MC_MoveVelocity等来覆盖旧的MC_MoveRelative指令•也可以在当前MC_MoveRelative指令执行过程中,更新该指令的Distance和Velocity数值后,再次触发该MC_MoveRelative指令的Execute管脚,也可以实现实时Override的功能『优点』轴不用停止,可以平滑过渡到新的指令或是同一指令的新参数。
超驰控制系统

超驰控制系统概述超驰控制又叫做取代控制,也称选择性控制。
通常自动控制系统只能在生产工艺正常时进行工作,一旦生产进入自动状态,控制器就要改为手动,待事故排除后,控制系统再重新投入工作,在大型生产工艺过程中,除了要求控制系统在生产处于正常状态时能够克服外界干扰,平稳操作做外还必须考虑在事故状态下也能安全生产,即当生产操作达到安全极限时,应有保护性措施。
生产保护性措施有两类:一类是硬保护措施;一类是软保护措施。
所谓硬保护措施,就是当生产操作达到安全极限时,会发出声,光报警。
此事由操作工将控制器切换到手动,进行手动操作处理;或是通过专门设置的连锁保护线路实现自动停车,达到保护生产的目的。
对于连续生产过程来说,即使短暂的设备停车,也会造成巨大的经济损失,因此这种硬保护措施已经逐渐被软保护措施所替代。
所谓软保护措施,就是通过一个特定设计的选择性控制系统,在生产短期内处于不正常状况时,生产设备不需要停车,由选择性控制系统自动改变操作方式,使参数脱离极限值,并且当参数恢复正常时,原控制系统自动恢复,避免停车,而且无需人的参与就可恢复正常生产。
超驰控制系统原理以往用常规控制仪表构成的控制系统绝大部分都缺少识别系统内、外设备状态品质的能力。
只要输入端有偏差信号存在,控制器就会有相应的动作,而不管系统内部是否出现问题或外部生产设备工作是否异常,有时甚至会出现控制背离给定值的现象而造成事故。
超驰控制则能有效地抑制上述不良后果。
对内,它是监视自动控制过程的眼睛,随时检测控制回路中变送器信号的品质、输入输出偏差限值等。
如果是控制仪表本身出现问题,控制回路就失去了自动控制的基础条件、超驰控制将选择自动切手动方式把控制回路自动转为手动;对外,它是系统的安全转折器,若自动控制仪表一切正常,主、辅设备或各种自动控制系统之间的运行状态产生异动,超驰控制将根据判定逻辑得出的结果,决定自动控制系统的控制策略或运行方向,从而转入安全通道,脱离可能发生的危险工况。
超驰控制

执行器
大气
测量、变送 测量、变送
开关型选择控制系统方块图
选择性控制方案2:连续型选择控制系统
蒸汽 汽包 反 炉膛 反 给水 气开 燃料
•当保护作用取代正常情况下的控制作用 时,切换过程是连续的; •一般有两台控制器,一台在正常工况下 工作,另一台在非正常工况下工作。它们 的输出同时送往选择器(高选器或低选器) 进行选择后,送往执行器。
8.4 选择性控制系统
选择性控制问题的提出
• 控制系统的设计需要考虑各种工况,除了要求控制系统在生产处 于正常运行情况下能克服外界干扰,维持生产的平稳运行外,还要 求当生产操作达到安全极限时,控制系统有一种应变能力,能采取 相应的保护措施,促使生产操作离开安全极限,返回到正常情况, 或者使生产暂时停止下来,以防止事故的发生或进一步扩大。 • 考虑设置两套控制系统,一套为正常生产情况下的自动控制系统, 另一套为非正常生产情况下的安全保护系统。当生产操作条件趋向 限制条件时,用于控制不安全情况的自动保护系统自动取代正常情 况下工作的控制系统。直到生产操作重新回到安全范围时,正常情 况下工作的控制系统又自动恢复对生产过程的正常控制。 • 选择性控制系统又被称为取代控制系统或自动保护控制系统或超 驰控制系统。
•选择性控制系统是软保护性措施。
选择性控制方案1:开关型选择控制系统
裂解气 气炳稀裂 解气 裂解气 气炳稀裂解气
液 炳 稀 裂解气
(a) (b)
液炳稀 裂解气
丙稀冷却器的两种控制方案
给定 温度控制器
-
原理: 在安全生产的极限值以内,生产过程就 按照工艺要求来进行正常控制。 一旦安全指标达到极限值时,选择性控 制系统通过自动选择装置,切断工艺操 作指标控制器的输出,将控制阀迅速关 闭或打开,以防止事故的发生,直到安 全生产指标回到限值以内时,系统才又 自动重新恢复到正常生产过程的控制, 按工艺操作指标进行控制。
超驰控制的含义

最佳答案超驰控制所谓超驰控制就是当自动控制系统接到事故报警、偏差越限、故障等异常信号时,超驰逻辑将根据事故发生的原因立即执行自动切手动、优先增、优先减、禁止增、禁止减等逻辑功能,将系统转换到预设定好的安全状态,并发出报警信号。
以往用常规控制仪表构成的控制系统绝大部分都缺少识别系统内、外设备状态品质的能力。
只要输入端有偏差信号存在,控制器就会有相应的动作,而不管系统内部是否出现问题或外部生产设备工作是否异常,有时甚至会出现控制背离给定值的现象而造成事故。
超驰控制则能有效地抑制上述不良后果。
对内,它是监视自动控制过程的眼睛,随时检测控制回路中变送器信号的品质、输入输出偏差限值等。
如果是控制仪表本身出现问题,控制回路就失去了自动控制的基础条件、超驰控制将选择自动切手动方式把控制回路自动转为手动;对外,它是系统的安全转折器,若自动控制仪表一切正常,主、辅设备或各种自动控制系统之间的运行状态产生异动,超驰控制将根据判定逻辑得出的结果,决定自动控制系统的控制策略或运行方向,从而转入安全通道,脱离可能发生的危险工况。
DCS和FCS都设计有超驰控制功能,但它在我国工业生产过程自动控制的实际应用却不多。
随着DCS和FCS应用的深入,超驰控制的功能将会得到人们的重视,超驰控制的技术也将走向成熟,到那时,超驰控制就会成为自动控制系统中不可缺少的组成部分。
超驰控制系统依照功能可分为三类 1 开关型超驰控制系统开关型超驰控制系统一般是在主路控制器到调节阀门间设置一个电磁阀门,由辅路超驰信号控制电磁阀门。
当超驰信号送过来的时候,电磁阀门断开。
主路调节阀门由于失气或失电,调节阀门自动向预先设定的FC 或FO动作。
也就是说,当超驰信号出现的时候。
调节阀门的最终动作要么是全开要么是全关,此时调节阀门不会动态的进行调节。
2 连续型超驰控制系统连续型超驰控制是将开关型超驰控制系统中的电磁阀门换成了一个选择性控制器。
该选择型控制器可以预先设定为优先选择信号高的或者是信号低的一侧信号,也就是说,主路控制信号和超驰控制信号始终都是通向该选择器的。
20150421_超驰控制与选择控制
常用的均匀控制方案
塔
塔
甲
乙
LC
单回路均匀控制系统
塔
甲
塔
乙
h(t)
LC
FC
qo(t)
串级均匀控制系统
均匀控制系统的分析
Qi(t) 精 馏
H(t) 塔
A
LC FC
Qo(t)
假设流量回路调节迅速,对液位 对象而言其动态滞后可忽略;并 不考虑液位测量滞后。则广义对 象特性可表示成
A
dH (t) dt
=
+ 控制通道 +
Gp (s)
被控变量 y
测量值 ym
测量变送 Gm (s)
问题:如何构成一个负反馈控制系统?
控制器的“正反作用”选择
定义:当被控变量的测量值增大时,控制器的输出也增大, 则该控制器为“正作用”;否则,当测量值增大时,控制器输出 反而减少,则该控制器为“反作用”。 选择要点:使控制回路成为“负反馈”系统。 选择方法: (1)假设检验法。先假设控制器的作用方向,再检查控制回 路能否成为“负反馈”系统。 (2)回路判别法。先画出控制系统的方块图,并确定回路除 控制器外的各环节作用方向,再确定控制器的正反作用。
▪ 当液位测量噪声较大时,为避免出料流量的同频率波动,可对 液位测量信号进行低通滤波。
超驰控制与选择控制
吴平 浙江理工大学自动化系
2015/04/21
控制器的“正反作用”选择问题
设定值 ysp
+
_
偏差 e
控制器 Gc (s)
控制变量 u
扰动 D
操纵变量
执行器
q
Gv (s)
被控对象
干扰通道 GD (s)
过程控制工程9.选择性控制与分程控制

液氨蒸发器选择控制方块图
选择控制系统的抗积分饱和
抗积分饱和方法:当某一控制器起作用时,让另一备 用控制器的输出跟踪起作用控制器的输出,从而避免 备用控制器的积分累加。
选择控制系统抗积分饱和的实现
分程与阀位控制系统
间歇聚合反应器的控制问题
控制要求:反应开始前,需要用蒸汽加热以达到反应所需 的温度;当反应开始后,因放出大量反应热,需要用冷水 进行冷却。要求全过程自动控制反应器的温度?
反应器温度分程控制系统
问题: (1)选择两调节阀 的气开气关属性; (2)温度控制器的 正反作用; (3)协调两调节阀 的动作; (4)如何克服广义 对象的非线性。
反应器温度控制系统 调节阀的分程动作关系
工作过程: (1)当温度偏低时,调节阀 气动信号增大。若冷水阀还 未全关,则逐步关冷水阀; 否则,开大蒸汽阀; (2)当温度偏高时,调节阀 气动信号减少。若蒸汽阀还 未全关,则逐步关蒸汽阀; 否则,开大冷水阀;
选择性控制与分程控制
主要内容
n 选择性控制问题的由来; n 选择性控制的设计方法与应用场合; n 分程控制的特点与适用场合; n 分程区间的确定方法; n 阀位控制的概念与设计方法。
选择性控制系统
选择性控制分类
n 超驰控制(Override Control),也称约 束控制(Constraint Control)
轻柴油抽出板温度 的双重控制系统
图中VPC称为“阀位控制器”, 其测量值为主调节阀(本例 中为三通调节阀)的开度。
系统特点: (1)对主参数的控制能力显 著提高。与分程控制不同的 是,两调节阀可同时动作。 (2)通过设定Vsp,可实现能 量回收的最大化。
多回路PID控制系统小结
n 用于改善控制系统性能的多回路PID系统 (1)串级控制系统; (2)前馈控制系统; (3)变增益/变比值控制系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•选择性控系统是软保护性措施。
选择性控制方案1:开关型选择控制系统
裂解气 气炳稀裂 解气 裂解气 气炳稀裂解气
液 炳 稀 裂解气
(a) (b)
液炳稀 裂解气
丙稀冷却器的两种控制方案
给定 温度控制器
-
原理: 在安全生产的极限值以内,生产过程就 按照工艺要求来进行正常控制。 一旦安全指标达到极限值时,选择性控 制系统通过自动选择装置,切断工艺操 作指标控制器的输出,将控制阀迅速关 闭或打开,以防止事故的发生,直到安 全生产指标回到限值以内时,系统才又 自动重新恢复到正常生产过程的控制, 按工艺操作指标进行控制。
积分饱和及抗积分饱和措施
• 什么是积分饱和? 当一个具有积分作用的控制器处于开环工作状态时,如果偏差输入信号 一直存在,由于积分作用的存在,控制器的输出不断增加或不断减小,一 直达到输出的极限值为止,这种现象称为“积分饱和”。 • 产生积分饱和的三个条件: 一是控制器具有积分作用;二是控制器处于开环工作状态,其输出没有 被送往执行器;三是控制器的输入偏差信号长期存在。 • 积分饱和的后果: 当控制器处于积分饱和状态时,它的输出将达到最大或最小的极限值, 该极限值已超出执行器的有效输入信号范围,它在某个时刻重新被选择器 选中,取代另一个控制器对系统进行控制时,由于它的输出已到达饱和区, 不在执行器的有效输入范围之内,所以它并不能立即发挥作用,使得控制 作用不及时。
蒸汽压力与燃料低选控制系统
测量、变送
-
燃气压力控制器 低选器 执行器
燃料压力 对象
蒸汽压力 对象
燃料压力控制器
-
测量、变送
蒸汽压力与燃气压力选择性控制系统方块图
选择性控制方案3:混合型选择控制系统
蒸汽 汽包
在同一个控制系统中开关型选择性控制 与连续型选择性控制同时并存的系统, 称为混合型选择性控制系统。
燃料
混合型选择性控制系统
选择性控制系统的类型
• 选择器在控制器与控制阀之间 • (1)选择不同控制器的输出构成选择性控制系统。按工艺约束 条件的要求,从两个不同的控制器的输出中选择一个信号控制阀 门的动作,实现软保护。这类选择性控制系统中有两个控制器, 即正常工作控制器和工况异常情况下起取代作用的控制器。 • (2)选择不同操纵变量的选择性控制系统。在达到某一工艺约 束条件后,能按事先设计好的逻辑关系,把控制器的输出从一个 控制阀转移到另一个控制阀上,在新的工况条件下,控制另一控 制阀的动作。这类选择性控制系统中有两个控制阀。 • 选择器在变送器和控制器之间。 • 对被控变量进行选择,几个测量变送器合用一个控制器。常见的 有两种: • (1)选择最高或最低测量值。将其中最高(或最低)的一个测 量值送至控制器。 • (2)选择可靠测量值。在同个检测点安装多台变送器,从中选 择最可靠的测量值进行操作控制。值的选取可以是最高值,也可 以是最低值,还可以是中间值。
• 防止积分饱和的方法: (1)限幅法 这种方法是通过一些专门的技术措施对积分反馈信 号加以限制,从而使控制器输出信号被限制在工作信号范围之内。 (2)积分切除法 这种方法是当控制器处于开环工作状态时,将控 制器的积分作用切除掉,这样就不会使控制器输出一直增大到最大 值或一直减小到最小值,不会产生积分饱和。
液位对象 温度对象
执行器
大气
测量、变送 测量、变送
开关型选择控制系统方块图
选择性控制方案2:连续型选择控制系统
蒸汽 汽包 反 炉膛 反 给水 气开 燃料
•当保护作用取代正常情况下的控制作用 时,切换过程是连续的; •一般有两台控制器,一台在正常工况下 工作,另一台在非正常工况下工作。它们 的输出同时送往选择器(高选器或低选器) 进行选择后,送往执行器。
8.4 选择性控制系统
选择性控制问题的提出
• 控制系统的设计需要考虑各种工况,除了要求控制系统在生产处 于正常运行情况下能克服外界干扰,维持生产的平稳运行外,还要 求当生产操作达到安全极限时,控制系统有一种应变能力,能采取 相应的保护措施,促使生产操作离开安全极限,返回到正常情况, 或者使生产暂时停止下来,以防止事故的发生或进一步扩大。 • 考虑设置两套控制系统,一套为正常生产情况下的自动控制系统, 另一套为非正常生产情况下的安全保护系统。当生产操作条件趋向 限制条件时,用于控制不安全情况的自动保护系统自动取代正常情 况下工作的控制系统。直到生产操作重新回到安全范围时,正常情 况下工作的控制系统又自动恢复对生产过程的正常控制。 • 选择性控制系统又被称为取代控制系统或自动保护控制系统或超 驰控制系统。