第七章静态测试数据处理
gps静态测量数据处理
gps静态测量数据处理一、基线解算的类型1、单基线解(1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。
这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。
所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。
(2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。
2、多基线解(1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。
(2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。
(3)多站整体解(绝对坐标)(4)单基线解算的过程(5)利用基线解算软件解算基线向量的过程二、基线解算结果的质量评定指标1、单位权方差因子(1)定义:(2)实质:反映观测值的质量,又称为参考方差因子。
越小越好。
2、RMS - 均方根误差(1)定义:(2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。
3、数据删除率(1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。
被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。
(2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。
数据删除率越高,说明观测值的质量越差。
4、RATIO(1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。
静态测试方法
静态测试方法静态测试是软件测试中的一种重要方法,它是在软件编写完成后,通过检查源代码、设计文档和其他相关文档来发现软件中的错误和缺陷。
静态测试方法可以帮助开发人员在软件开发的早期阶段就发现和解决问题,从而降低软件开发成本,提高软件质量。
本文将介绍静态测试的基本概念、常用的静态测试方法以及静态测试的优缺点。
一、静态测试的基本概念。
静态测试是一种不需要执行程序的测试方法,它主要通过检查和审查软件文档来发现问题。
静态测试包括静态代码分析、代码审查、代码走查等方法。
静态测试的主要目的是发现软件中的错误和缺陷,提高软件的质量和可靠性。
与动态测试相比,静态测试更早地介入到软件开发过程中,可以在软件开发的早期阶段就发现问题,从而减少后期的修改成本。
二、常用的静态测试方法。
1. 静态代码分析。
静态代码分析是通过工具对源代码进行分析,发现代码中的潜在问题和错误。
静态代码分析可以帮助开发人员发现代码中的逻辑错误、潜在的安全问题和性能问题。
静态代码分析工具可以对代码进行语法分析、数据流分析、控制流分析等,从而发现代码中的问题。
2. 代码审查。
代码审查是一种通过人工检查源代码来发现问题的方法。
代码审查可以通过小组讨论、专家评审等方式进行。
代码审查可以帮助发现代码中的逻辑错误、风格问题、最佳实践违反等。
代码审查还可以促进团队成员之间的交流和学习,提高团队的整体水平。
3. 代码走查。
代码走查是一种由程序员自己对自己的代码进行检查的方法。
程序员可以通过代码走查来发现代码中的问题,并及时进行修复。
代码走查可以帮助程序员提高对自己代码的质量意识,减少代码中的错误和缺陷。
三、静态测试的优缺点。
1. 优点。
(1)早期发现问题,静态测试可以在软件开发的早期阶段就发现问题,从而减少后期的修改成本。
(2)提高代码质量,静态测试可以帮助发现代码中的问题,提高代码的质量和可靠性。
(3)促进团队交流,代码审查和代码走查可以促进团队成员之间的交流和学习,提高团队的整体水平。
静态测试实验报告
静态测试实验报告1. 简介静态测试是软件开发过程中的一种重要测试方法,主要通过检查源代码、设计文档和其他软件开发过程中产生的文档,以发现软件中存在的缺陷和错误。
本文将介绍静态测试的基本概念、常用的静态测试方法和实验结果分析。
2. 静态测试方法2.1 代码审查代码审查是一种常用的静态测试方法,通过对源代码的逐行检查,发现其中可能存在的错误和潜在的问题。
代码审查可以手动进行,也可以借助静态代码分析工具辅助完成。
在代码审查过程中,可以关注以下几个方面:•代码规范:检查代码是否符合编码规范,如命名规范、缩进规范等。
•逻辑错误:检查代码中是否存在逻辑错误,如条件判断是否正确、循环是否正确等。
•安全性问题:检查代码是否存在潜在的安全性问题,如输入校验不完善、SQL注入漏洞等。
2.2 文档审查除了代码审查外,文档审查也是一种常用的静态测试方法。
在软件开发过程中,会产生大量的设计文档、需求文档等,这些文档中可能存在错误和矛盾之处。
通过仔细审查这些文档,可以及早发现和解决问题。
在文档审查过程中,可以关注以下几个方面:•一致性检查:检查文档之间的一致性,如需求文档和设计文档之间的一致性。
•完整性检查:检查文档的完整性,是否存在关键信息的缺失。
•可读性检查:检查文档的可读性,是否易于理解和使用。
3. 实验设计本次实验旨在比较代码审查和文档审查对于发现软件错误的效果。
实验采用了以下步骤:1.随机选择了10个源代码文件和10个设计文档作为实验样本。
2.将这些样本分为两组,一组进行代码审查,另一组进行文档审查。
3.在代码审查组中,由一名经验丰富的开发人员对源代码进行逐行审查,记录发现的错误和问题。
4.在文档审查组中,由一名经验丰富的软件测试人员对设计文档进行仔细审查,记录发现的错误和问题。
5.对实验结果进行统计分析,比较代码审查和文档审查的效果。
4. 实验结果分析经过实验,我们得到了以下结果:•代码审查组共发现了20个错误和问题,平均每个样本发现2个问题。
第七章 静态动态测试数据处理
dx1
3x1 4
2
x3
2
dx2
6 x1 x2 8 x2
2
x3
3
dx3
d
y ( 6 x1 x2 x3
2
x1 ) (
2
3x1 4
2
x3
2
x2 ) (
2
6 x1 x2 8 x2
2
x3
3
x3 ) 2
间接测量量的不确定度是每一个直接测量量的合成。
二、有效数字及运算规则 1、有效数字的基本概念 数据记录、运算的准确性要和测量的准确性相适应
2 2 2
N ln N 2 ln N 2 ln N 2 x y y z z N x
2 2
2
例如:
y
3 x1 x 2 4 x 2
2
x3
2
两边求微分得:
dy 6 x1 x2 x3
有效数字:所有准确数 字和一位欠准确数字
x 1.674 cm x 0.04 cm
x 1.674 0.04 cm?? x 1.67 0.04 cm
数学:
0.25 0.2500
0 物理测量: .25 m 25.00 cm
(a)分度值1mm
0 1 2 3 4
L=3.23cm
可以证明: 0
x
P( x )
f (x) d(x) 0.683
3
极限误差
P(2 x 2 ) 0.954 P(3 x 3 ) 0.997
正态分布特征:
①单峰性 ②对称性
f (x)
《误差理论与数据处理(苐7版)》费业泰 第7章 动态测试数据处理基本方法.
二、随机过程的特征量:表现为一个函数
1、概率密度函数—描述某一时刻随机数据落在给定
区间的概率
k
P[x x(t) x x] lim T[x x(t) x x] lim
ti
i 1
T
T
T T
f (x) lim P[x x(t) x x]
合肥工业大学
误差理论与数据处理
第一节 动态测试基本概念
一、动态测试
1)动态测试与静态测试
静态测试:被测量静止不变 测量误差基本相互独立
动态测试:被测量随时间或空间而变化 测量系统处于动态情况下 测量误差具有相关性
2)动态测量误差特点 时空性;随机性;相关性;动态性
合肥工业大学
误差理论与数据处理
第一节 动态测试基本概念
ห้องสมุดไป่ตู้x(t)
x( f )
A
A
0
t
0 ff
② 复杂周期数据
x(t)
0
合肥工业大学
x(t) A0 (an cos 2nf1t bn sin 2nf1t)
n1
x( f )
x1 x2 x3 x4
t
x0
0 f1 2 f1 3 f14 f1 f
误差理论与数据处理
第一节 动态测试基本概念
2、非周期数据
随机函数
c、设 y(t) x(t) g(t)
非随机函数 my (t) mx (t) g(t) Ry (t,t') E[{y(t) my (t)}{y(t') my (t')}]
E[{x(t) mx (t)}{x(t') mx (t')}] Rx (t,t')
软件测试静态测试方法
软件测试静态测试方法软件测试静态测试是一种在软件开发过程中对软件文档进行检查和验证的方法。
它的目的是发现和纠正软件文档中潜在的错误和问题,以确保软件在实际运行时能够正常工作。
静态测试方法主要包括代码审查、需求分析和设计评审。
代码审查是一种常见的静态测试方法,它通过对程序代码进行检查和评估,发现可能存在的缺陷和错误,提高代码的质量。
代码审查有很多不同的技术和方法,例如代码检查、代码走查和代码评审等。
在代码审查过程中,审查者会仔细阅读代码,并通过对比已经确定正确的代码规范和最佳实践,来发现可能的问题和改进的空间。
通过代码审查,可以提前发现并修复代码中的潜在缺陷,减少后期的测试和维护工作。
需求分析和设计评审也是一种常用的静态测试方法。
在软件开发过程中,需求分析和设计是非常关键的环节,它们直接影响到最终的软件功能和性能。
通过对需求文档和设计文档进行评审,可以发现和纠正潜在的问题和错误。
在需求分析评审中,评审人员会仔细审查需求文档,并验证其准确性、完整性和一致性。
在设计评审中,评审人员会仔细审查设计文档,并评估其可行性、可维护性和可扩展性。
通过需求分析和设计评审,可以及早发现并修复潜在的问题,减少后期的开发和测试工作。
静态测试方法有很多优点。
首先,它可以在软件开发早期发现和纠正错误,提高软件的质量。
与动态测试方法相比,静态测试方法具有更高的效率和成本效益,因为它可以在代码编写和测试之前就发现问题。
其次,静态测试方法可以提高代码的可读性和可维护性。
通过对代码进行审查和评估,可以发现和修复冗余的代码、不良的编程习惯和不符合规范的代码等问题。
最后,静态测试方法可以提高开发团队的协作和沟通能力。
通过对文档进行评审,可以促使团队成员之间更加紧密地合作,提高软件开发的效率和质量。
然而,静态测试方法也存在一些不足之处。
首先,静态测试方法无法覆盖所有的代码路径和场景。
尽管可以通过对代码进行多次审查和评估,但仍然无法保证发现并修复所有的问题。
软件测试中的静态测试技术
软件测试中的静态测试技术在软件开发过程中,静态测试技术被广泛应用于测试阶段之前的代码审查和文档检查。
静态测试技术不需要运行程序,而是通过对软件代码和相关文档的检查,发现和纠正错误和缺陷。
这篇文章将介绍软件测试中常用的静态测试技术,包括代码审查、静态分析和形式方法。
1. 代码审查代码审查是一种常用的静态测试技术,通过对软件代码的检查来发现和纠正错误和缺陷。
代码审查可以分为三种类型:代码走读、代码检视和代码审查会议。
代码走读是指开发人员对代码进行个人检查,并根据预定义的规则和准则来评估代码的质量。
代码走读可以帮助发现代码中的逻辑错误、潜在的性能问题和不一致的代码风格。
代码检视是指由开发人员组成的小组对代码进行评估和讨论。
代码检视通常会有一个主持人引导讨论,参与者会通过对代码的审查来发现和纠正错误和缺陷。
代码检视可以发现更多的错误和缺陷,因为不同的人可能会有不同的观点和经验。
代码审查会议是一种更正式的审查过程,通常由项目经理或质量保证团队组织。
在代码审查会议中,开发人员会将他们的代码提交给一个审查小组来进行评估。
审查小组会在会议上讨论代码中的错误和缺陷,并制定相应的纠正措施。
2. 静态分析静态分析是通过对源代码进行解析和模拟来评估软件的质量和性能。
静态分析工具可以检测代码中的一些常见问题,例如空指针引用、未初始化变量和死代码等。
静态分析可以帮助开发人员发现和修复这些问题,从而减少软件运行时的错误。
静态分析工具通常会检查代码中的语法和语义错误,并提供相应的修复建议。
例如,如果代码中存在未初始化变量的引用,静态分析工具可以提示开发人员在使用该变量之前初始化它。
静态分析工具还可以检查代码中的性能问题,并提供相应的优化建议,例如优化循环和减少代码重复。
3. 形式方法形式方法是一种基于数学推理的静态测试技术,旨在通过形式化规范和证明来验证软件的正确性和完整性。
形式方法可以用于验证软件的逻辑正确性、安全性和并发性等属性。
第7章动态测试数据处理的基本方法.

(7-2)
时域
频域
复杂周期数据
复杂周期数据是由不同频率的正弦周期数据叠加而成的, 其频率比为有理数,其图形是由基波的整数倍波形叠加而成 的。 若基波频率为f1,各组成项的频率为nfl,n=l,2,…,则 复杂周期数据可以展开为博里叶级数:
(7-3)
式中,
式(7—3)还可以写成如下形式:
1 / 50
3 / 50
是无理数
准周期数据的表达式
(7-5)
式中的任一频率成分fn与另一频率成分fm之比 在工程实践中,当两个或 准周期数据的频域描述如图所示。 几个不相关的周期性物理现 象混合作用时,常会产生准 周期数据。例如几个电动机 不同步振动造成的机床或仪 表的振动,其动态测试结果 即为准周期数据。 fn/fm不全为有理数。
一、研究随机过程理论的实际意义
• 随着自动化生产和科学研究的发展,越来越多地需要测 量连续变化的过程,这时被测量可能是随时间而连续变化, 或者是随空间而连续变化。因此测量过程和测量结果也是 随时间而连续变化的。同样,由于检测对象、测量仪器和 测量条件的随机误差,因而被测过程和测量结果都是一个 随机的但是连续变化的函数。它有别于上述随机变量,我 们称之为随机函数。 • 对随机函数的分析计算,本质上类似于前几章的随机误 差,但较复杂一些。 • 随机过程理论就是研究随机性表现为一个过程的随机现 象的学科,通常它是研究动态测量过程及其测量结果的理 论根据。
2.非周期数据
• 凡能用明确的数学关系式描述的,但又 不是周期性的数据,均称为非周期数据。 它包括准周期数据和瞬态数据。
•
准周期数据
• 准周期数据是由彼此的频率比不全为有理数的两个以上 正弦数据叠加而成的数据。 • 例如
静态数据处理
华测静态培训接收机数据采集及数据处理:一、X90接收机的使用①电源健:按一秒即可开机,长按三秒即可关机②切换健:刚开机时,主机默认为RTK模式,如果做静态就要通过切换健进行切换:常按住切换健,此时电台指示灯长亮,等电台灯不亮,即可松开表明已切换到静态,轻按切换键绿灯亮表示静态模式,黄灯亮是RTK模式③电池指示灯(红):长亮表示有电,闪烁表示电量不足④卫星指示灯(蓝):不亮表示不搜星,闪烁表示搜星正常⑤电台指示灯(绿):做RTK时,电台指示灯会一秒闪烁一次⑥数据采集灯(黄):做静态时,每隔几秒闪一次,表示在记录数据,闪烁的间隔即是采样间隔二、数据下载将接收机用USB或者串口和电脑连接,打开”数据下载软件(HcLoader)”连接—设置(选择USB或COM1- 连接,连接好后把数据下载下来,放在指定的文件夹下;下载时,先“输入测站信息”,点名不超过四个字符,最好为数字或字母,然后“数据导出”。
注:在连接或下载数据时主机的数据灯(黄)会长亮,此时尽量不要进行其他操作,直到数据灯不亮时再进行。
三、静态数据处理 1.任务的建立 2.坐标系统的建立 3.数据的导入4.数据检查5.基线的处理6.网平差7.成果检查8.成果提交三、静态数据处理1.任务的建立打开电脑“开始——程序——华测静态处理——静态处理软件”或者直接打开桌面上的快捷方式。
注:首先把下载下来的数据统一放到一个文件夹下面,新建任务时直接选择此文件夹,并注意选择相应的坐标系统。
三、静态数据处理 2.坐标系统的建立新建任务时,虽然坐标系统已经选定,但可以对于中央子午线或者是投影高等可能需要相应的改动或新建。
点击“工具”——”坐标系管理“,如下图操作:七参数,一般默认不输投影高椭球参数名称长半轴扁率Bj54 6378245 298.3西安80 6378140 298.257 中央子午线三、静态数据处理3.数据的导入项目建完后,开始加载GPS数据观测文件。
静态测试方法
静态测试方法静态测试是软件测试中的一种重要测试方法,它是在软件编码阶段进行的一种测试方法,通过对软件代码的静态分析来发现潜在的缺陷和错误。
相比于动态测试,静态测试更加注重对代码本身的分析,可以帮助开发人员在早期发现和解决问题,从而降低软件开发过程中的成本和风险。
本文将介绍静态测试的方法和步骤,以及在实际应用中的注意事项。
静态测试的方法主要包括代码审查、静态分析和软件度量。
代码审查是通过审查人员对软件代码进行仔细的检查,以发现潜在的错误和缺陷。
静态分析是通过使用工具或软件对代码进行分析,以发现潜在的问题。
软件度量是通过对软件代码的度量和分析,来评估软件的质量和复杂度。
在进行代码审查时,审查人员需要对代码进行全面的检查,包括代码的正确性、一致性、可读性和健壮性等方面。
审查人员可以通过阅读代码、注释和文档来了解代码的功能和实现方式,从而发现潜在的问题。
同时,审查人员还可以通过使用代码审查工具来辅助进行审查,以提高审查的效率和质量。
在进行静态分析时,可以使用各种静态分析工具来对代码进行分析,以发现潜在的问题。
静态分析工具可以帮助开发人员发现代码中的潜在错误、不一致性和安全问题,从而提高代码的质量和可靠性。
同时,静态分析工具还可以帮助开发人员对代码进行优化和重构,以提高代码的性能和可维护性。
在进行软件度量时,可以使用各种软件度量工具来对软件代码进行度量和分析,以评估软件的质量和复杂度。
软件度量工具可以帮助开发人员了解软件的规模、结构和复杂度,从而帮助他们进行软件开发和管理。
同时,软件度量工具还可以帮助开发人员发现软件中的潜在问题和风险,从而提高软件的可靠性和稳定性。
在实际应用中,静态测试需要注意以下几点。
首先,需要制定详细的测试计划和测试标准,以确保测试的全面和有效。
其次,需要对测试人员进行专业的培训和指导,以提高测试的质量和效率。
最后,需要对测试结果进行及时和有效的分析和反馈,以帮助开发人员及时发现和解决问题。
静态测量数据处理流程

静态测量数据处理流程英文回答:Data Processing Flow of Static Measurement Data.The data processing flow of static measurement data includes the following steps:1. Data Acquisition.The first step is to acquire data from the measurement device. This can be done through a variety of methods, such as using a data acquisition card, a USB interface, or a wireless connection.2. Data Preprocessing.Once the data has been acquired, it must be preprocessed to remove noise and other artifacts. This can be done through a variety of techniques, such as filtering,smoothing, and resampling.3. Feature Extraction.The next step is to extract features from the data. Features are characteristics of the data that are relevant to the analysis task at hand. For example, if the goal is to classify objects, then features could include theobject's size, shape, and color.4. Feature Selection.Once the features have been extracted, they must be selected for use in the analysis task. This can be done through a variety of techniques, such as using astatistical test or a machine learning algorithm.5. Model Building.The next step is to build a model that can be used to predict the outcome of the analysis task. This can be done through a variety of techniques, such as using a regressionmodel, a classification model, or a clustering model.6. Model Evaluation.Once the model has been built, it must be evaluated to ensure that it is accurate and reliable. This can be done through a variety of techniques, such as using a holdout sample or a cross-validation technique.7. Model Deployment.The final step is to deploy the model so that it can be used to make predictions on new data. This can be done through a variety of methods, such as using a web service or a mobile app.中文回答:静态测量数据处理流程。
静态数据处理软件操作步骤
静态数据处理软件
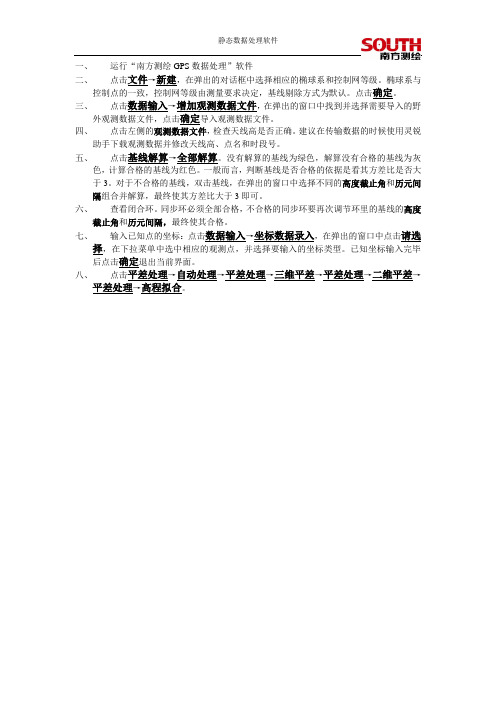
一、运行“南方测绘GPS数据处理”软件
二、点击文件→新建,在弹出的对话框中选择相应的椭球系和控制网等级。
椭球系与
控制点的一致,控制网等级由测量要求决定,基线剔除方式为默认。
点击确定。
三、点击数据输入→增加观测数据文件,在弹出的窗口中找到并选择需要导入的野
外观测数据文件,点击确定导入观测数据文件。
四、点击左侧的观测数据文件,检查天线高是否正确。
建议在传输数据的时候使用灵锐
助手下载观测数据并修改天线高、点名和时段号。
五、点击基线解算→全部解算。
没有解算的基线为绿色,解算没有合格的基线为灰
色,计算合格的基线为红色。
一般而言,判断基线是否合格的依据是看其方差比是否大于3。
对于不合格的基线,双击基线,在弹出的窗口中选择不同的高度截止角和历元间隔组合并解算,最终使其方差比大于3即可。
六、查看闭合环。
同步环必须全部合格,不合格的同步环要再次调节环里的基线的高度
截止角和历元间隔,最终使其合格。
七、输入已知点的坐标:点击数据输入→坐标数据录入,在弹出的窗口中点击请选
择,在下拉菜单中选中相应的观测点,并选择要输入的坐标类型。
已知坐标输入完毕后点击确定退出当前界面。
八、点击平差处理→自动处理→平差处理→三维平差→平差处理→二维平差→
平差处理→高程拟合。
静态测试方法
静态测试方法静态测试是软件测试中的一种重要方法,它通过对软件代码的静态分析,发现潜在的错误和缺陷。
静态测试方法可以在软件开发的早期阶段就发现问题,从而降低后期修复成本,提高软件质量。
本文将介绍静态测试的基本概念、方法和应用。
首先,静态测试的基本概念。
静态测试是指在软件运行之前,对软件代码进行的分析和检查。
它不需要运行软件,只需要对代码进行审查,以发现潜在的问题。
静态测试可以分为静态代码分析和静态代码审查两种方法。
静态代码分析是通过工具对代码进行自动化分析,发现潜在的问题。
而静态代码审查则是由人工对代码进行仔细的检查,发现问题并提出改进建议。
其次,静态测试的方法。
静态测试的方法包括代码审查、代码走查和静态分析等。
代码审查是指由开发人员对代码进行仔细的检查,发现潜在的错误和缺陷。
代码走查是由开发团队的成员集体对代码进行检查,以发现问题并提出改进建议。
静态分析是通过工具对代码进行自动化分析,发现潜在的问题。
这些方法可以结合使用,以提高静态测试的效果。
静态测试的应用。
静态测试可以应用于软件开发的各个阶段,包括需求分析、设计、编码和测试等阶段。
在需求分析阶段,可以通过对需求文档的审查,发现需求的不完整和不一致。
在设计阶段,可以通过对设计文档和模型的审查,发现设计的问题和缺陷。
在编码阶段,可以通过对代码的审查和分析,发现编码的错误和不规范。
在测试阶段,可以通过对测试用例和测试数据的审查,发现测试的问题和缺陷。
因此,静态测试可以在软件开发的各个阶段发挥重要作用。
总结,静态测试是软件测试中的重要方法,它通过对软件代码的静态分析,发现潜在的错误和缺陷。
静态测试的方法包括代码审查、代码走查和静态分析等。
静态测试可以应用于软件开发的各个阶段,发现问题并提出改进建议。
因此,静态测试对于提高软件质量、降低后期修复成本具有重要意义。
希望本文的介绍可以帮助读者更好地理解静态测试的概念、方法和应用。
软件测试-静态分析方法教案

《现代软件测试基础》教案第七章软件静态测试课时1 (45分钟) (2)1.回顾上一章: [5分钟] (2)2.课程知识点讲解: (2)2.1.具体知识点1:[5分钟] (2)2.2.具体知识点2:[10分钟] (3)2.3.具体知识点3:[20分钟] (3)3.本节总结[5分钟] (3)4.考核点 (4)5.测试题 (4)6.扩展部分 (4)7.学员问题汇总 (4)8.作业 (4)课时2(45分钟) (4)9.回顾上一节: [5分钟] (5)10.课程知识点讲解: (5)10.1.具体知识点1:[10分钟] (5)10.2.具体知识点2:[15分钟] (5)10.3.具体知识点3:[10分钟] (5)11.本节总结[5分钟] (5)12.考核点 (5)13.测试题 (5)14.扩展部分 (6)15.学员问题汇总 (6)16.作业 (6)授课教师:XXX讲授课时:1.5课时上机课时:0课时作业评讲: 0课时课时1 (45分钟)第七章软件静态测试●本章主要目的⏹介绍静态测试的相关知识和概念⏹讲解各阶段评审的要求和流程⏹讲解代码检查的要求和方法⏹讲解软件复杂性分析的方法⏹讲解软件质量度量模型及方法⏹讲解软件质量管理⏹介绍惠普静态分析工具HP FortifySCA●本章重点⏹各阶段评审⏹代码检查⏹软件复杂性分析⏹软件质量度量⏹惠普静态分析工具HP FortifySCA●本章难点⏹软件复杂性分析⏹软件质量模型1.回顾上一章: [5分钟]简单回顾软件测试过程及软件测试过程管理概念,然后引入软件静态测试。
2.课程知识点讲解:2.1.具体知识点1:[5分钟]软件静态测试:软件静态测试的概念、特点、对象以及软件静态测试的主要内容。
●知识点讲解导入:我们都知道软件测试有很多种,那么什么是软件静态测试呢?接着阐述软件静态测试的概念。
为什么要引入软件静态测试?介绍引入静态测试的目的以及阐述静态测试的特点。
软件静态测试主要包含哪些内容(简单介绍,后面会详细展开)?2.2.具体知识点2:[10分钟]各阶段评审●评审评审的概念,由评审所包含的内容引入同行评审,着重讲解评审概念中软件元素包含哪些。
静态动态测试数据处理

数据同步
保持不同位置或不同系统间的数据一致性, 确保数据的准确性和可靠性。
同步策略
制定数据同步的规则和流程,包括数据版本 控制、冲突解决机制等。
06
测试数据处理安全
数据泄露防护
加密存储
01
对敏感数据进行加密存储,确保即使数据被盗也无法轻易解密。
访问控制
02
实施严格的访问控制策略,限制对数据的访问权限,防止未授
数据备份
数据备份是动态测试数据处理中必不 可少的环节,它涉及到将存储的数据 备份到其他介质上,以防止数据丢失 或损坏。
数据备份需要存储在可靠的介质上, 并定期检查备份数据的完整性和可用 性。
数据备份可以采用定时备份、差异备 份和增量备份等多种方式,根据实际 需求选择合适的备份策略。
在数据备份过程中还需要注意备份数 据的安全性和保密性,采取相应的加 密和访问控制措施,确保备份数据不 被非法获取和篡改。
数据加密技术
数据加密
通过加密算法对数据进行加密,确保数据在传输和存储过程中的安 全性。
加密算法
用于加密数据的算法,常见的有对称加密算法和公钥加密算法。
解密过程
在需要使用加密数据时,通过解密算法将加密过的数据还原为可读 状态。
数据同步技术
同步方式
包括实时同步和定时同步,根据不同需求选 择合适的同步方式。
数据安全
采取必要的安全措施,如加密、权限控制等,确保数据的安全性和保密性。
05
测试数据处理技术
数据压缩技术
数据压缩
通过算法对数据进行压缩,减少存储空间和 传输时间,提高数据处理的效率。
压缩比
衡量数据压缩效果的指标,通常以压缩前后 的数据量大小进行比较。
静态数据处理流程
静态数据处理一.静态测量的准备工作(简单介绍) (2)二.数据下载: (3)安装主机USB驱动: (3)打开下载软件hcloader: (3)输入测站信息: (3)下载数据: (3)三.数据处理操作过程 (4)软件安装: (4)安装软件狗驱动: (4)数据处理过程 (4)文件>新建项目导入观测数据查看,设置坐标系基线处理网平差成果报告附C、D、E 级GPS测量手簿记录格式 ................................................. 错误!未定义书签。
一.静态测量的准备工作(简单介绍)在室内选点的时候要注意控制网的网形:正三角形是最好的网形(如上图),特长或特短边的出现(如下图)都会使误差增大。
在野外勘测时,尽量选择周围无遮挡、无高压线、无强电磁干扰的地方进行定点,观测,这样不仅可以保证精度,也可以减少内业处理的很多麻烦。
在外业测量时,切换到静态后,要查看数据记录指示灯(黄灯)是否有规律闪烁(间隔5秒),否则重新启动接收机,重新切换到静态。
外业观测时记录数据要全面(仪器号、点号、开机时间、关机时间、仪器高、等)。
已知控制点未知待定点二.数据下载:安装主机USB驱动:当第一次使用主机USB下载数据时,电脑会提示发现硬件,出现驱动程序安装向导,选择驱动的保存路径(默认在COMPASS的安装路径下有driver/USB),点“下一步”即可完成安装;打开下载软件hcloader:开始>程序>华测静态处理>文件下载,点击即可。
设置连接端口:connection>settings>com选择USB、band rate选115200。
列表框里就会显示主机里有的文件(如果没有可以点击Update,稍等即可):输入测站信息:根据野外记录输入测站名(不超过4个字符,一般为左下端的4位仪器号)、时段(在同一点上不同时间观测的数据,目的是区别文件名)、天线高(野外实地所量测的仪器高,一般为仪器的斜高),选择文件类型(一般默认),确认即可。
第七章静态动态测试数据处理
lim 1
x ( ) T T
T 0
x(t
)
x
x(t
)
x
dt
2 x
1
lim T T
T
0 x(t)dt x
1
lim T T
T
0 x(t )dt x
lim 1
x ( ) T T
T 0
x(t
) x(t
)dt
2 x
第二节 动态测试数据处理
一、动态测试数据处理概述
1.动态测试 1)动态测试与静态测试
静态测试:被测量静止不变 测量误差基本相互独立
动态测试:被测量随时间或空间而变化 测量系统处于动态情况下 测量误差具有相关性
2)动态测量误差特点 时空性;随机性;相关性;动态性
2.动态测试数据的分类 动态测试数据
2) 同频相关,不同频不相关
3)
互相关函数不是偶函数 ;
时呈最大值
0
0 : x(t)和y(t)之间的滞后时间
Rxy( ) 为非偶函数的证明:
随机过程是平稳的, 在t时刻从样本计算的互相关函数应和
t 时刻从样本采样计算的互相关函数是一致的,即:
Rxy
(
)
lim
T
1 T
第七章 静态、动态测试数据处理
本章的主要内容有静态测试数据处理方 法、回归分析、曲线拟合,动态试验数据 的时域分析和频域分析。
第一节 静态测试数据处理
一、试验数据处理方法 1.表格法——用表格来表示函数的方法。 特点:简单方便,但不能给出所有的函数关系, 不易看出函数的变化规律。 2.图示法——根据试验结果作出的尽可能反映真 实情况的曲线。 特点:直观看出函数变化规律,但图示仅有函数 变化关系而不能进行数学分析。 3.经验公式法——用回归分析的方法确定经验公 式的函数类型及其参数的方法。 特点:可对公式进行数学分析。
单元测试之静态测试

单元测试阶段的静态测试流程
1.编译器检查 2.利用工具进行静态分析 3.人工代码审查和代码走查
编译器和解释器是第一步的测试
静态分析
一、规则检查 1.代码符合行业规范,国家标准,企业内部规范 2.把艺术变成科学 3.去掉隐含的编码缺陷 4.前事不忘后事之师 常用工具:CodeWizard、C++ Test 、 Logiscope、 Cpptest、 PRQA
软件静态测试技术
什么是静态测试?
静态测试,是在不执行代码的情况下对代 码进行测试的过程。 适用对象: 计算机软件单元、计算机软件部件、 计算机软件配置项的源代码。 进入条件: 代码无错误地通过编译。
静态测试的方法
代码审查 代码走查 静态分析 1.控制流分析:使用控制流程图系统检查被测程序 的控制结构的工作。 2.数据流分析:使用控制流程图分析数据发生的异 常情况。 3.接口分析:程序静态分析和设计分析。 4.表达式分析:检查表达式的错误。
代码审查、走查
代码审查的内容:
检查代码和设计的一致性:即检查代码执行标准的情 况;检查代码逻辑表达的正确性;检查代码结构的合理性; 检查代码的可读性
代码审查的组织
由四人以上组成:组长,资深程序员,程序编写者 (秘书)和专职测试人员。组长不能是被测试程序的编写 者,组长负责分配资料,安排计划,主持开会,记录并保 存被发现的错误。
代码审查单
请参见GJB141-2004附录A,也可以根据具体项目情况 自行编写
代码审查、走查
注意事项
时间和地点应该避免被干扰 每次不应该超过6个小时,每小时审查150-200行代 码 树立正确的态度 实际项目的实施策略:上午组织会议审查,讲解 代码,不超过3个小时。下午测试人员和审查组长 总结上午的审查结果,填写问题报告单,如果可 以,请代码编写人员确认。具体审查的代码行数 可以根据实际情况增加或减少。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
而在一般测量工作中,测量次数远小于370次,因此,如果
出现绝对值大于3 的误差,就可以认为,这个误差属于过失 误差。因此,可以把3 作为区分随机误差和过失误差的一种
界限。
图7-3是标准差 与测量次数n的关系曲线,从图中可以
看出,当测量次数较少时,增加测量次数,可明显减小测量 误差;但当测量的次数超过15~20次时,再增加测量次数, 则测量误差几乎不变。
测试误差按其性质的不同分为三类,即: 系统误差 随机误差 过失误差(粗大误差 )
系统误差 保持一定数值或按一定规律变化的误 差,称为系统误差。如:由于仪器标度尺刻划的不 准确;测量者观察仪器指针时习惯于斜视等原因引 起的误差,就具有系统误差的特性。
随机误差 即使在相同的条件下,对同一参数重 复的进行多次测量,所得到的测定值也不可能完全 相同。其测量误差具有各不相同数值与符号,这种 误差称为随机误差。
分布检验法
因为随机误差服从正态分布,所以只包含随机 误差的测定值也服从正态分布。如果发现测定值不 服从正态分布,就有理由怀疑测定值中包含变化的 系统误差,这就是分布检验法的基本思想。显然, 分布检验法只适用于重复测量次数足够多的情况。
3)系统误差的消除
由于产生系统误差的原因非常复杂,消除系统误 差不可能有统一的方法,因此需根据具体情况,采取 适当的措施。消除系统误差可从以下两方面着手。
第七章 静态测试数据处理
本章的主要内容有测量误差、测量 列的处理步骤与测量结果的表达、一元 线性回归和多元线性回归方法等。
7.1 测量误差
一、测试精度与误差 测试精度:又称为精确度,用来描述测量结果与真值的接近 程度。 测试误差:在任何测量中,由于各种因素的影响,测量所 得到的数值与被测参数的真值不可能完全相同,而总会有差 别,这个差别称为测试误差。
1、随机误差
实践表明,测试结果 的随机误差大多服从正态分布如
图7-1所示。正态分布的概率密度函数为:
f ( )
1
2
exp(
2 2 2
)
(7-4)
式中: ——为测量误差;
——均方根误差。
从图可以看出, 值愈小,正态分布密度曲线愈陡峭, 幅值愈大,测量误差小;反之, 值愈大,曲线愈趋平坦, 测量误差大。图7Fra bibliotek1正态分布密度曲线
1)算术平均值
设 l1 ,l2 ,…,ln 为n次等精度测量所得的值,其算术平均
值 L 为:
n
L l1
l2
ln
li
i 1
(7-6)
n
n
由于被测参数的真实值无法知道,因此在直接测量中常
将测量列的算术平均值作为真值的估计值。如此测量列的残
差为:
vi li L
式中:vi ——表残差;
若系统误差的数值不超过随机误差,可采用下述的方法:
a. 将残差 vi' 按测量的先后顺序排列,如前一半残差和与后 一半残差和之差显著地不等于零,则该测量列包含累进系统误 差。
b. 在一个测量列中,如条件改变前测定值的残差与条件 改变后测定值的残差和之差显著地不等于零,则该测量列包 含随测量条件的改变而出现的固定的系统误差。
递减的系统误差,称为线性变化的系统误差。
②周期性变化的系统误差:误差的大小随时间周期性交
替变化的系统误差,称为周期性变化的系统误差。
③复杂的系统误差:误差按比较复杂规律变化的系统误
差。
2)系统误差的发现
系统误差的数值往往比较大,而且会直接 影响测量的准确度。因此必须消除或减小系统 误差。有时系统误差不易查明,下面介绍两种 发现系统误差的方法,即:
根据积ˆ 分概n 1率1 (v表12 可v22 知, v绝n2 ) 对值n 1小1 in1于vi2
(7-9)
的随机误差出现的概
率约为0.68,而绝对值小于2 和3 的随机误差,出现的概 率分别为0.95和0.997。由此可知,绝对值大于3 的随机误
差出现的概率仅为0.027,即在370次测量中才可能出现一次。
li ——第i个测量值,i=1,2,…,n
(7-7)
2)标准差
在一个等精密度测量列中,当测量次数趋于无穷大时,
测量列的标准差 为:
1 n
(v12
v22
vn2 )
1 n
n i 1
vi2
(n ) (7-8)
而在实际测量过程中,测量次数是有限的,由数理统计
学可知,标准差的无偏估计可用贝塞尔法进行计算,即:
图7-3 与测量次数n的关系曲线
2、系统误差
1)系统误差的分类 根据系统误差特性的不同,可将系统误差分为如下两大类。 定值系统误差 在整个测量过程中,误差的大小和方向始 终保持不变。 变值系统误差 误差的大小和方向按一定的规律变化。变 值系统误差的种类较多,有的还比较复杂,常见的系统误差 有:
①线性变化的系统误差:误差的大小随时间线性递增或
过失误差 由测量工作中的错误、疏忽大意等原 因引起的误差,称为随机误差。
二、测量误差的分析与处理
测量误差的分析就是研究误差的性质与规律。 即:研究和确定过失误差与随机误差之间的界限, 以便舍弃那些含有过失误差的测定值;研究系统误 差的规律,寻找将系统误差从随机误差中分离出来 的方法,并设法消除其影响;研究随机误差的规律, 分析和确定测量的精密度;从一系列测定值中求出 最接近于被测参数真实值的测量结果。
1)过失误差与异常数据 过失误差是由于在测量过程中某些突然发生的不 正常因素(外界干扰、测量条件意外改变,测量者 疏忽大意)所造成的、与其它大多数误差相比明显 偏大的误差。
在一个测量列中,可能出现个别过大或过小的测 定值,这种包含巨大误差的测定值,通常称为异常 数据。异常数据往往是由过失误差引起的,也可能 是由巨大的随机误差引起的。
残差分析法 分布检验法
残差分析法
测量列的残差为:
vi'
Li
L
vi
(i
1 n
n i 1
i )
(7-22)
在随机误差小于系统误差的情况下,vi' 的正负号将主要取
决于变化的系统误差 i 。因此,根据残差 vi' 的符号,可以发
现变化的系统误差的存在。将测定值的残差 vi' 按测量顺序列
表或作图以观察系统误差的变化规律。
防止系统误差的产生
采用完善的测量方法,正确地安装、调整和使用测 量仪器、设备,保持稳定的测量条件,防止外界的 干扰等。
对测定值引入修正值
在测量工作之前,对测量仪器和设备进行校正, 取得仪器示值与准确值之间的关系,确定各种修正 公式、修正表或修正曲线,用修正的方法消除系统 误差。
3. 过失误差与异常数据的取舍