大学物理振动波动 ppt课件
合集下载
大学普通物理课件 第21章 - 波动
本章重点:机械波中的简谐波 波的叠加
§21-1 机械波 行波
Mechanical Wave and Travelling Wave
1. 机械波的产生和传播 机械波——机械振动的传播。
机械波产生和传播的条件:
波源 弹性介质
波源——引起介质振动,即产生形变和位移的振(扰)动 系统。锣鼓 琴弦 声带 扬声器纸膜 抖绳的手
O点的振动状态向右传播到 x 点需要时间:t x / u x处的质元开始振动的时刻比原点晚 x / u ,所以 x 处的质元在 时刻 t 的位移应该等于原点在 (t x / u) 的位移,即
y A cos[ (t x u) 0 ]
y A cos[ (t x u) 0 ]
2. 均匀细棒中纵波波动方程的推导
设细棒密度为,截面积为S,沿细棒取x坐标,设波沿x
正向传播。考察媒质中 x x +x 段质元:
y (x)
y ( x x)
S
F (x)
F ( x x)
x x x x
x
t 时刻两端面的位移如图,则x处微小质元的线应变可表
结论:波形曲线也是余弦函数曲线;
波的传播表现为波形曲线的平移. 波形曲线以波速u向传播方向平移。x ut
[例1] 设波源位于 x 轴的原点处, y (cm) 波源的振动曲线如图所示,已知波速为 2 u = 5 m/s ,波向 x 正向传播。 O 6 t (s) 2 4 (1)画出距波源 15 m处质元的振 2 动曲线; (2)画出 t = 3 s 时的波形曲线。(3)写出 20m 处质元的速度表达式。 解:由图可知
1 G 2 ( SD ) 2 材料发生切变时,单位体积内的弹性势能为:
§21-1 机械波 行波
Mechanical Wave and Travelling Wave
1. 机械波的产生和传播 机械波——机械振动的传播。
机械波产生和传播的条件:
波源 弹性介质
波源——引起介质振动,即产生形变和位移的振(扰)动 系统。锣鼓 琴弦 声带 扬声器纸膜 抖绳的手
O点的振动状态向右传播到 x 点需要时间:t x / u x处的质元开始振动的时刻比原点晚 x / u ,所以 x 处的质元在 时刻 t 的位移应该等于原点在 (t x / u) 的位移,即
y A cos[ (t x u) 0 ]
y A cos[ (t x u) 0 ]
2. 均匀细棒中纵波波动方程的推导
设细棒密度为,截面积为S,沿细棒取x坐标,设波沿x
正向传播。考察媒质中 x x +x 段质元:
y (x)
y ( x x)
S
F (x)
F ( x x)
x x x x
x
t 时刻两端面的位移如图,则x处微小质元的线应变可表
结论:波形曲线也是余弦函数曲线;
波的传播表现为波形曲线的平移. 波形曲线以波速u向传播方向平移。x ut
[例1] 设波源位于 x 轴的原点处, y (cm) 波源的振动曲线如图所示,已知波速为 2 u = 5 m/s ,波向 x 正向传播。 O 6 t (s) 2 4 (1)画出距波源 15 m处质元的振 2 动曲线; (2)画出 t = 3 s 时的波形曲线。(3)写出 20m 处质元的速度表达式。 解:由图可知
1 G 2 ( SD ) 2 材料发生切变时,单位体积内的弹性势能为:
10612_大学物理振动波动优秀ppt课件

01
02
03
声波传播速度
声波在介质中的传播速度 与介质的密度和弹性模量 有关。
2024/1/25
声波衰减
声波在传播过程中会因介 质的吸收和散射而逐渐衰 减。
声波反射和折射
声波在遇到不同介质界面 时会发生反射和折射现象 。
29
案例分析:医学超声诊断技术应用
超声成像原理
利用超声波在人体组织中的反射和折 射特性,将回声信号转换为图像,从 而实现对人体内部结构的可视化。
04
2024/1/25
05
阻尼振动的能量逐渐转化为 热能或其他形式的能量。
9
受迫振动产生条件及规律
受迫振动的定义:物 体在周期性外力作用 下产生的振动。
存在周期性外力作用 。
2024/1/25
受迫振动的产生条件
10
受迫振动产生条件及规律
外力频率与物体固有频率 不同。
2024/1/25
受迫振动的频率等于驱动 力频率,与物体固有频率 无关。
大学物理振动波 动优秀ppt课件
2024/1/25
1
目录
• 振动基本概念与简谐振动 • 阻尼振动、受迫振动与共振 • 波动基本概念与波动方程 • 干涉、衍射与偏振现象 • 多普勒效应与声波传播特性 • 非线性振动与混沌现象初步探讨
2024/1/25
2
01
振动基本概念与简谐振动
2024/1/25
3
受迫振动的规律
当驱动力频率接近物体固 有频率时,振幅显著增大 ,产生共振现象。
11
共振现象及其危害防范
2024/1/25
12
共振现象及其危害防范
对机器、设备等造成损坏 。
对建筑物、桥梁等结构造 成破坏。
大学物理知识点总结(振动及波动)省公开课获奖课件市赛课比赛一等奖课件

2、波旳干涉(含驻波)。 3、波旳能量旳求法。 4、多普勒效应。
相位、相位差和初相位旳求法: 解析法和旋转矢量法。
1、由已知旳初条件求初相位:
①已知初位置旳大小、正负以及初速度旳正负。
[例1]已知某质点振动旳初位置
y0
A 2
且v0
0
。
y A cos(t ) y Acos(t )
3
3
2
1
2
r2 r1
干涉加强: 2k (k 0,1,2,...)
若1 2 r2 r1 k
干涉减弱: (2k 1) (k 0,1,2,...)
若1 2
(2k 1)
2
3)驻波(干涉特例) 能量不传播
波节:振幅为零旳点 波腹:振幅最大旳点
多普勒效应: (以媒质为参照系)
所以y
2cos(πt 2
π3 );
(2)u
T
1,y
2cos[π(t 2
-
x)π3 ]
t(s)
[例2] 一平面简谐波在 t = 0 时刻旳波形图,设此简谐波旳频率
为250Hz,且此时质点P 旳运动方向向下 , 200m 。
求:1)该波旳波动方程;
2)在距O点为100m处质点旳振动方程与振动速度体现式。
动能势能相互转化
简谐振动旳描述
一、描述简谐振动旳物理量
① 振幅A:
A
x02
v02
2
② 角频率 : k
ห้องสมุดไป่ตู้
2
m
T
③ 相位( t + ) 和 初相 :
tg v0 x0
旳拟定!!
④相位差 : (2t 2 ) (1t 1 )
⑤周期 T 和频率 ν : T 2
相位、相位差和初相位旳求法: 解析法和旋转矢量法。
1、由已知旳初条件求初相位:
①已知初位置旳大小、正负以及初速度旳正负。
[例1]已知某质点振动旳初位置
y0
A 2
且v0
0
。
y A cos(t ) y Acos(t )
3
3
2
1
2
r2 r1
干涉加强: 2k (k 0,1,2,...)
若1 2 r2 r1 k
干涉减弱: (2k 1) (k 0,1,2,...)
若1 2
(2k 1)
2
3)驻波(干涉特例) 能量不传播
波节:振幅为零旳点 波腹:振幅最大旳点
多普勒效应: (以媒质为参照系)
所以y
2cos(πt 2
π3 );
(2)u
T
1,y
2cos[π(t 2
-
x)π3 ]
t(s)
[例2] 一平面简谐波在 t = 0 时刻旳波形图,设此简谐波旳频率
为250Hz,且此时质点P 旳运动方向向下 , 200m 。
求:1)该波旳波动方程;
2)在距O点为100m处质点旳振动方程与振动速度体现式。
动能势能相互转化
简谐振动旳描述
一、描述简谐振动旳物理量
① 振幅A:
A
x02
v02
2
② 角频率 : k
ห้องสมุดไป่ตู้
2
m
T
③ 相位( t + ) 和 初相 :
tg v0 x0
旳拟定!!
④相位差 : (2t 2 ) (1t 1 )
⑤周期 T 和频率 ν : T 2
大学物理物理学波动光学PPT课件
一束光分解为振动面垂直的两束光。
S2
E
2、杨氏双缝干涉实验装置
1801年,杨氏巧妙地设计了一种把单个波阵面分解为两个 波阵面以锁定两个光源之间的相位差的方法来研究光的干涉现 象。杨氏用叠加原理解释了干涉现象,在历史上第一次测定了 光的波长,为光的波动学说的确立奠定了基础。
3、双缝干涉的光程差
两光波在P点的光程差为 = r2-r1
?人的眼睛不能区分自然光与偏振光用于鉴别光的偏振状态的器件称为检偏器2偏振片是一种人工膜片对不同方向的光振动有选择吸收的性能从而使膜片中有一个特殊的方向当一束自然光射到膜片上时与此方向垂直的光振动分量完全被吸收只让平行于该方向的光振动分量通过即只允许沿某一特定方向的光通过的光学器件叫做偏振片
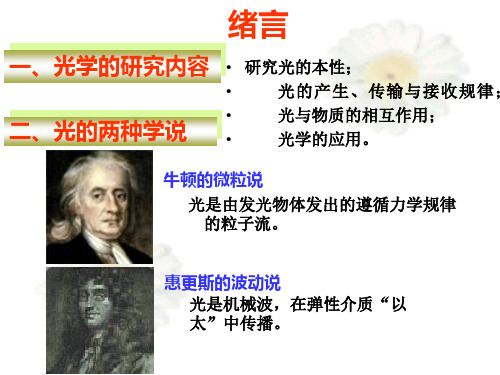
绪言
一、光学的研究内容 二、光的两种学说
薄膜干涉属于分振幅法
1、等倾干涉:
实验装置
在空气(或真空)中放入上
下表面平行,厚度为 e 的均 匀介质 n
光a与光 b的光程差为:
n(AB BC) (AD / 2)
光a有半波损失。
a
iD
b
n
A r
C e
B
由折射定律和几何关系可得出:
sin i nsin
AD ACsin i AC 2e tan n AB BC e / cos 代入 n(AB BC) (AD / 2)
光的干涉和衍射现象表明了光的波动性, 而光的偏振现象则显示了光是横波。光波作为 一种电磁波也包含两种矢量的振动,即电矢量 E和磁矢量H,引起感光作用和生理作用的是其 中的电矢量E,所以通常把E矢量称为光矢量, 把E振动称为光振动。
§8-1 光波及其相干条件
一、光波
1.光波的概念:
大学物理《波动》课件

t 1.0s
波形方程
y 1.0 cos( π - π x) 2
1.0 sin(π x)
y/m
1.0
o
2.0
x/m
-1.0
t 1.0 s 时刻波形图
第二节 波动学基础
3) x 0.5m 处质点的振动规律并做图 . y (1.0m) cos[2 π( t - x ) - π] 2.0s 2.0m 2
x 0.5m 处质点的振动方程
y (1.0m)cos(π t - π)
y
y/m
3
1.0
3*
2
4
4O
2
0 * 1.0 * 2.0 * t / s
1 -1.0*1
*
x 0.5 m 处质点的振动曲线
第二节 波动学基础
讨 论 1)给出下列波函数所表示的波的传播方向
和 x 0 点的初相位.
y -Acos2π ( t - x )
-
x)
2π T 2π
C
B
u B
TC
2π d dC
第二节 波动学基础
3 ) 如图简谐波 以余弦函数表示,
求 O、a、b、c 各
点振动初相位.
(-π ~ π )
t =0 A y
Oa
-A
A
O
y o π
O
A
O
y
a
π 2
O A
u
b c
A
y
y
t=T/4
x
b 0
c
-π 2
§8.5 波的干涉与衍射
波程差 r2 - r1
k k 0,1,2,
A A1 A2 振动始终加强
3 ) (k 1 2) k 0,1,2,
大学物理机械振动(课堂PPT)

k , k串k,串, k并k,并
m
.
12
上一页 下一页
t :相 位 , 或 位 相(r, ad)或相相 位决定谐振子某
: t 0时的相,称 位为初. 相一瞬时的运动状态
: 相位差,即两个相位之差。
1)对同一简谐运动,相位差可以给出两运动状
态间变化所需的时间.
t t2
t1
(t2) (t1)
4 上一页 下一页
要定义或证明一个运动是简谐振动,可以从 是否满足下面三个方程之一为依据。
Fkx
d2x dt2
2x
0
动力学特点
x A c o t s
运动学特点
某物理量如果满足后两个方程,那么这个物理量
是简谐振动量。
.
5
上一页 下一页
A (振幅决定谐振子运动的范围)
振子偏离平衡位 大置 位的 移最 的绝对 m)值
T
对于弹 :簧 k振 , T 子 2 m, 1 k
m
k 2 m
☆ 确定振动系统周期的方法:
(1)分析受力情F况 m,a或M 由J,写出动力学
(2)将动力学方dd2程 t2x变 2x为 0的形式,
如果能化为这种 也形 就式 证, 明了振动 振为 动
(3)由动力学方程 , 求写出出周T或 期频率 。
cos x0 0
A
sin v0 0
2
A
物体的振动 x方 0.1c程 o1st0 为 : m
.
2 19
上一页 下一页
振 A 幅 矢 A 的 量长
角频率 矢量逆时针匀角 速速 度 旋转的
周 期 T矢 量 旋 转 一 圈 所 T需 2 时 间
频率 矢量单位时间内圈旋数转的P
振动学基础-大学物理

2
A cos (t
)
7
8
特征量:
x 位移
A 振幅
广义:振动的物理量 最大位移 由初始条件决定 表征了系统的能量
9
x Acos t
圆频率 角频率
频率
2π
T 周期 T 1
系统的周期性 固有的性质 称固有频率…
t 相位 位相
初相位
初位相
取决于时间零点的选择
10
小结
S. H. V. 的判据
= /4 = /2 = 3/4
P··Q
= = 5/4 = 3/2 = 7/4
(-3/4) (-/2) (-/4)
35
§3 平面简谐波 一 机械波产生的条件 1 机械波的基本概念
一、波的产生 二、横波和纵波 三、波长 波的周期和频率 波速
36
一、机械波的产生 1、机械波——机械振动在弹性介质(固体、液 体和气体)内的传播
45
因 t' x u
yP (t)
A cos
t
x u
0
波线上任一点的质点任一瞬时的位移由上式给出, 此即所求的沿x 轴方向前进的平面简谐波的波动方程。
如果波沿x轴负方向传播,则相应的波动方程为:
yP (t)
A c os
t
x u
0
利用关系式 2 T 和 2 ,并uT概括波的两种可能的
y
hSg mg
船在任一位置时,以水面为坐标原点,竖直 向下的坐标轴为y 轴,船的位移用y 表示。
12
船的位移为y 时船所受合力为:
f (h y)Sg mg ySg
船在竖直方向作简谐振动,其角频率和周期为:
Sg
m
因 m Sh,
大学物理学完整10PPT课件

上式还可写为: 2π
上式表明,ω是频率的2π倍,表示物体在2π秒内完成的全 振动次数,故ω称为角频率或圆频率。
周期、频率和角频率都是描述物体振动快慢的物理量。在
国际单位制中,周期的单位为秒(s);频率的单位为赫兹(Hz );角频率的单位为弧度每秒(rad/s)。
对弹簧振子,由于
k m
故有:
T 2π m k
第4篇 振动与波动
第10章 机械振动
.
1
本章学习要点
简谐振动 简谐振动的合成 阻尼振动、受迫振动与共振 本章小结
.2ຫໍສະໝຸດ 10.1 简谐振动物体运动时,如果离开平衡位置的位移(或角位移)按余 弦函数或正弦函数的规律随时间变化,则这种运动称为简谐振 动。在忽略阻力的情况下,弹簧振子的振动及单摆的小角度摆 动等都可视为简谐振动。
当t=0时,相位ωt+φ=φ,φ称为初相位,简称初相,它是 决定初始时刻振动物体运动状态的物理量。在国际单位制中, 相位的单位为弧度(rad)。
.
12
用相位描述物体的运动状态,还能充分体现出振动的周期 性。例如:
ωt+φ=0时,物体位于正位移最大处,且v=0; ωt+φ=π/2时,物体位于平衡位置,且向x轴负方向运动 ,v=ωA; ωt+φ=π时,物体位于负位移最大处,且v=0; ωt+φ=3π/2时,物体位于平衡位置,且向x轴正方向运动 ,v=ωA; ωt+φ=2π时,物体位于正位移最大处,且v=0。
【解】以OO′为平衡位置,设逆时针转向为θ 角正向,棒在任意时刻的角位移都可用棒与OO′ 的夹角θ表示。根据题意,棒所受的重力矩为:
M1mgslin
2
.
7
当摆角θ很小时,sinθ≈θ,故
M 1mgl
大学物理学ppt课件

衍射分类
根据障碍物或孔的尺寸与光波长的相对大小,可分为菲涅尔衍射和 夫琅禾费衍射。
常见衍射现象
单缝衍射、圆孔衍射、光栅衍射等。
偏振光及其产生和检测
1 2
偏振光
光波中电矢量振动方向保持不变的光称为偏振光。
偏振光的产生 通过偏振片、反射和折射、散射、双折射等方法 可以获得偏振光。
3
偏振光的检测
利用偏振片、马吕斯定律、偏振光干涉等方法可 以检测偏振光。偏振光在光学、光电子学、光通 信等领域有广泛应用。
波的反射、折射和衍射
波在传播过程中遇到障碍物或不同介质界面时会发生反射、折射和 衍射现象。
波动方程与波速公式
波动方程
描述波在介质中传播时各质点振动状态的数学表达式。
波速公式
波速与介质性质及波的类型有关,一般表示为v=fλ,其中v为波速,f为频率,λ为波长。
声波、光波和多普勒效应
01
02
03
声波
由物体振动产生的机械波, 可在气体、液体和固体中 传播。
热力学第一定律表述
热力学第一定律,即能量守恒定律在热力学中的应用。它表明,一个热力学系统内能的增量等于外界对该系统所 做的功与该系统所吸收的热量之和。
应用举例
热力学第一定律广泛应用于各种能量转换和传递过程的分析,如热机、制冷机、热力发电等。通过计算系统内外 能量的变化和传递情况,可以评估系统的能效和性能。
牛顿运动定律
牛顿第一定律
又称惯性定律,指
牛顿第二定律
指出物体加速度与所受合外力成 正比,与物体质量成反比;公式 表示为F=ma。
牛顿第三定律
又称作用与反作用定律,指出两 个物体之间的作用力和反作用力 大小相等、方向相反、作用在同 一直线上。
根据障碍物或孔的尺寸与光波长的相对大小,可分为菲涅尔衍射和 夫琅禾费衍射。
常见衍射现象
单缝衍射、圆孔衍射、光栅衍射等。
偏振光及其产生和检测
1 2
偏振光
光波中电矢量振动方向保持不变的光称为偏振光。
偏振光的产生 通过偏振片、反射和折射、散射、双折射等方法 可以获得偏振光。
3
偏振光的检测
利用偏振片、马吕斯定律、偏振光干涉等方法可 以检测偏振光。偏振光在光学、光电子学、光通 信等领域有广泛应用。
波的反射、折射和衍射
波在传播过程中遇到障碍物或不同介质界面时会发生反射、折射和 衍射现象。
波动方程与波速公式
波动方程
描述波在介质中传播时各质点振动状态的数学表达式。
波速公式
波速与介质性质及波的类型有关,一般表示为v=fλ,其中v为波速,f为频率,λ为波长。
声波、光波和多普勒效应
01
02
03
声波
由物体振动产生的机械波, 可在气体、液体和固体中 传播。
热力学第一定律表述
热力学第一定律,即能量守恒定律在热力学中的应用。它表明,一个热力学系统内能的增量等于外界对该系统所 做的功与该系统所吸收的热量之和。
应用举例
热力学第一定律广泛应用于各种能量转换和传递过程的分析,如热机、制冷机、热力发电等。通过计算系统内外 能量的变化和传递情况,可以评估系统的能效和性能。
牛顿运动定律
牛顿第一定律
又称惯性定律,指
牛顿第二定律
指出物体加速度与所受合外力成 正比,与物体质量成反比;公式 表示为F=ma。
牛顿第三定律
又称作用与反作用定律,指出两 个物体之间的作用力和反作用力 大小相等、方向相反、作用在同 一直线上。
(大学物理 课件)波动方程
表示 x1 处质点的振动方程
结束
返回
2. t = t 1 (常数) y
o y = A cos ω ( t 1 x )+j u x
表示在 t 1 时刻的波形
结束
返回
3. t 与 x 都发生变化 x t = t1 y 1 = A cos ω ( t 1 u ) + j x t = t 1+Δ t y ´= A cos ω ( t 1+Δ t u ) + j y
波 动 方 程
返回16章 结束
波动方程 一、平面简谐波的波动方程 y u x
§16-2平面简谐波
o
B
x
参考点O点的振动方程为: y = A cos ( t + j ) ω
任意点(B点)的振动方程,即波动方程为: y = A cos ω ( t x ) + j u 结束 返回
平面简谐波的波动方程为: x j y = A cos ω ( t u ) + t x j y = A cos 2π ( T l ) +
A cos 2π (x +120 t ) = 60
π
3
例2. 有一列向 x 轴正方向传播的平面简 谐波,它在t = 0时刻的波形如图所示,其波 速为u =600m/s。试写出波动方程。 y(m)
u 5 x (m)
o
12
.
结束
返回
解: o 由图可知, 在t = 0时刻
y(m)
u 5 x (m)
12
.
y1 y´ ut
.
O
x
x´
t
令 y 1= y ´
得: ´= x +uΔ t x 这表示相应于位移y1的相位,向前传播了 uΔ t的距离。 结束 返回
大学物理 振动和波动

ox 0
x
为半径作圆周(参考圆)
c
3、过 x 0 点作o x 轴的垂线,与圆交点为 b 、c
4、从o到 b、c 分别作矢量
5、
v0
v0
0
0
,下方矢量为旋转矢量
,上方矢量为旋转矢量
(
t
t
)
0
20
o 画旋转矢量图:取坐标、画圆周、通过 x 0 作垂线
到交点画矢量,若 v0 0 ,在下 方; 反之在上方.
3
一、简谐振动(Simple Harmonic Vibration)
1. 特征
k FN
★ 动力学特征
m
x
o x
F合外力(矩)kx
p 运动物体相 对平衡位置 的位移或角
位移
合外力(矩)
坐标原点必须在平 衡位置的运动物体
(广义弹性力) 的广义坐标
(准弹性力)
平动:(线)坐标
转动:角坐标 4
★ 微分方程特征
结论:夹角 t0
② 写运动方程
xA co s(t )
A
x02
v0
2
夹角 t0
21
例2 两个物体作同方向、
同频率、同振幅的 谐振动,在振动过 程中,每当第一个 物体经过位移为 A / 2 的位置向平衡位 置运动时,第二个物体也经过此位置, 但向远离平衡位置的方向运动,试利用 旋转矢量法求它们的相位差。
旋转角速度 固有圆频率
t
A t 0
A
t
o
x
满足上述四个条件的矢量称为旋转矢量
17
结论:
◆ 相位 t
大学物理振动和波动ppt课件(2024)

大学物理振动和波动 ppt课件
2024/1/28
1
目录
2024/1/28
• 振动基本概念与分类 • 波动基本概念与传播特性 • 振动与波动相互作用原理 • 光学中振动和波动现象解析 • 声学中振动和波动现象解析 • 总结与展望
2
01 振动基本概念与分类
2024/1/28
3
振动的定义及特点
振动的定义
振幅
声源振动的幅度用振幅表示,振幅越大,声音的 响度越大。
3
相位
声波在传播过程中,各质点的振动状态用相位描 述。相位差反映了声波在空间中的传播情况。
2024/1/28
25
室内声学环境评价指标体系
响度
音调
人耳对声音强弱的主观感受称为响度,与 声源的振幅和频率有关。
人耳对声音高低的主观感受称为音调,与 声源的频率有关。
物体在平衡位置附近所做的往复运动。
振动的特点
周期性、重复性、等时性。
2024/1/28
4
简谐振动与阻尼振动
2024/1/28
简谐振动
物体在回复力作用下,离开平衡位置 后所做的往复运动,其回复力与位移 成正比,方向相反。
阻尼振动
在振动过程中,由于摩擦、空气阻力 等因素,振幅逐渐减小的振动。
5
受迫振动与共振现象
传播途径控制
在噪声传播途径中采取措施,阻断或减弱噪声的传播。例如设置声屏 障、采用吸音材料等。
接收者防护
对受噪声影响的人员采取防护措施,如佩戴耳塞、耳罩等个人防护用 品。
案例分析
以某工厂噪声控制为例,通过采取上述综合措施,使工厂噪声降低到 国家标准以内,改善了工人的工作环境和周边居民的生活环境。
27
2024/1/28
1
目录
2024/1/28
• 振动基本概念与分类 • 波动基本概念与传播特性 • 振动与波动相互作用原理 • 光学中振动和波动现象解析 • 声学中振动和波动现象解析 • 总结与展望
2
01 振动基本概念与分类
2024/1/28
3
振动的定义及特点
振动的定义
振幅
声源振动的幅度用振幅表示,振幅越大,声音的 响度越大。
3
相位
声波在传播过程中,各质点的振动状态用相位描 述。相位差反映了声波在空间中的传播情况。
2024/1/28
25
室内声学环境评价指标体系
响度
音调
人耳对声音强弱的主观感受称为响度,与 声源的振幅和频率有关。
人耳对声音高低的主观感受称为音调,与 声源的频率有关。
物体在平衡位置附近所做的往复运动。
振动的特点
周期性、重复性、等时性。
2024/1/28
4
简谐振动与阻尼振动
2024/1/28
简谐振动
物体在回复力作用下,离开平衡位置 后所做的往复运动,其回复力与位移 成正比,方向相反。
阻尼振动
在振动过程中,由于摩擦、空气阻力 等因素,振幅逐渐减小的振动。
5
受迫振动与共振现象
传播途径控制
在噪声传播途径中采取措施,阻断或减弱噪声的传播。例如设置声屏 障、采用吸音材料等。
接收者防护
对受噪声影响的人员采取防护措施,如佩戴耳塞、耳罩等个人防护用 品。
案例分析
以某工厂噪声控制为例,通过采取上述综合措施,使工厂噪声降低到 国家标准以内,改善了工人的工作环境和周边居民的生活环境。
27
大学物理 第十一章波动

或
y ( x , t ) A cos( t kx ) 0
k
2
u
k称作角波数
上述各式是假设波的传播方向与x轴正方向 一致。如果波的传播方向与x轴正向相反,则式 中的x变为(-x)
y o
u
t
x
x y ( x , t ) A cos ( t [ ) ] 0 u
有一平面波沿x轴负方向传播,t=1s 时的波形如图 所示,波速 u=2m/s ,求:⑴ 该波的波函数;⑵ 画出 t=2s 时刻的波形曲线。 y/m u=2m/s t=1s 4 m ,A 4 m 解: 4 4 2 1 o 2 4
T 2s u 2
T
s
-4
x/m
(A) Y=0.2cos10 (t-x / 10); (C) Y=0.2cos[10t- / 2]; (D) 不能确定。
y ( t ) A cos( t ) p o
x y ( x , t ) A cos ( t [ ) ] 0 o u 由P点的振动曲线知, t = 0时 ,Vp< 0,
建立简谐波方程的步骤可归纳如下: (1) 根据给定的条件,写出波动在媒质中某点S (不一定是波源)的振动方程 (2)建立坐标系,选定坐标原点,在坐标轴上任 选一点P,求出该点相对于S点的振动落后或 超前的时间 (3)根据在一定坐标系中波的传播方向,从S点振动方 程中的减去或加上这段时间,即得到波动方程
第十一章 波动 (Wave)
振动在空间的传播过程叫做波动
常见的波有: 机械波 , 电磁波 , …
§11.1
1. 产生条件:
机械波的产生和传播
大学物理课件-第7章 波动(wave)66页PPT
2 0.1 2 3
0.3(m)
鞍山科技大学 姜丽娜
17
例2:已知一平面简谐波沿X轴负向传播,波速u=9m/s ,距原点
1m处的A点振动方程为
yA0.02 co3s t(1 4)yO 1m A
X
求:波函数。
例2 解: 3,2 3, u6(m )
y0 .0c 2o 3 ts (12 x 1 )
yq=Acos(ω(t+△t -(xp +u△t )/u)+φ) =Acos(ω(t-xp /u)+φ) =yp
Y
q
O
p
X
鞍山科技大学 姜丽娜
15
Y
q
O
p
X
上式说明:t时刻p点的运动状态经△t时间传到了q点,所以 波函数表示波形的传播过程。当t连续变化时,波形连续不断前 进,故波动过程可以表示为波形随时间不断向前移动的过程,波 形不断前进的波称行波。
。
鞍山科技大学 姜丽娜
21
解 : u / 1/0 5 0 0 2 (m )
波 1 t 0 源 时 ,y 0 振 : y A 2 0, v 0 2 动 0 c 4 o 1 方 s 2 3 0 t( 0 3 2 程 )m ( )m
⑵波函数: y2c 4o 1s0 (t 03 22 x)m ( )m
第7章 波 动(wave)
§7.1 行波
§7.6 惠更斯原理
§7.2 简谐波
§7.7 波的叠加 驻波
§7.3 物体的弹性形变 §7.8 声波
§7.4 弹性介质中的波速§7.9 多普勒效应
§7.5 波的能量
鞍山科技大学 姜丽娜
1
第7章 波 动(wave)
大学物理系列之简谐振动PPT课件
同号时为加速 异号时为减速
O
X
A
A
第33页/共66页
振动质点位移、速度与特征点 (t=0时对应的φ)
v
xv x
x0>0时Φ在1,4象限 v0>0时Φ在3,4象限
x
v
x
第34页/共66页
x
x
xv x
例1. 一物体沿 x 轴作简谐振动,A= 12cm, T = 2s
x 当t = 0时, 0= 6cm, 且向x正方向运动。
t 时刻与x轴的夹角
( t﹢ )
相位
A
A
第32页/共66页
11
旋转矢量端续点 上M 作匀速圆周运动
其 速率
A
振子的运动速度(与 X 轴同向为正)
A
t
旋转矢量端点 M 的加速度为
法向加速度,其大小为
A
和
t
A
X O
振子的运动加速度(与 X 轴同向为正)
A
t
任一时刻的 和 值,
其正负号仅表示方向。
• 任意位置
Fmsgin
悬线的张力和重力的合力沿悬线的垂直方向指向平衡位置。
第16页/共66页
Fmsgin
当θ很小时 sinθ ≈ θ ( θ < 5 °)
恢复力 Fmg
符合简谐振动的动力学定义
由牛顿第二定律
mat mg
d2
ml
mg
dt2
令 2 g l
d2 2 0
dt2
T 2 2
l g
单摆运动学方程: mcots()
弹簧振子 t= 0 时
m = 5×10 -3 kg
例三 k = 2×10 -4 N·m -1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x = 0 ,v > 0 t32k
2
(或
2
)
如 t = 0 则 — 初始状态
一般取k= 0 描述 ±2k—重复性
7.
4. 常数A 、 的确定( 解析法)
t=0
x0 Acos
v0Asin
A
x
2 0
( v0
)2
arctan(
v0 )
x0
— 任意角(4个象限)
或
arccoxs0AFra bibliotek再结合v0(>0、=
11.
讨论:如振子P,t = 0 时处于下状态,求
(1)
x0
A 2
v0 0;
(2)
A
x0
2
v0 0
v0
由图知
1
3
2
3
A1
1
2
4
33
A P 2
4. 相位差 (同频率) A/2 o
v0
— 两振动“步调”
相位差
A2
A
x
A2
A1
o
2 1
x
(t2 ) (t1 )2 1(初相差)
规定 逆时针在前为超前
第九章 振动
概述
振动、波动 — 横跨物理学所有领域
一.广义振动 — 物理量在中心值附近作周期性变化
1. 机械振动
位置或位移
特征
运动学— 周期性 动力学— 恢复力
形态
轨迹 — 直线或曲线 形式 — 平动(质点) 或转动(刚体)
2. 非机械振动 电磁振荡、交流电……
以上具有相似物理规律和研究方法
1.
二.最基本的振动 —— 简谐运动
同上
t = 0 角位置 初相位 同上
y
vm t
π
an
A
M
2
o a vP x
t
10.
注 a. 规定
+
b. 旋矢图
-
一般:
Ⅰ、Ⅱ、Ⅲ象限 正角,
状态
相位
Ⅳ象限 负角
一 一对应
二.旋转矢量法
1. 表示谐振动(三要素)
xAco st()
3
o A 3 x0v0Px
2. 描绘x-t 曲线
3. 确定初相位 (或相位) (几何法)
(2) 由起始位置运动到 x = -0.04m处所需要的最
短时间.
v
x/m
0.080.04 o 0.04 0.08 14.
m 0 . 0 k ,1 A g 0 . 0 m ,T 8 4 s ,t0,x0.04m 0,0v
求(1)
t1.0s,x,F
(2)
x
=
0.04
m
到-0.04
v
m最短时间
x/m
0、<0)判断
8.
9-2 旋转矢量
一.简谐运动与匀速圆周运动
如图所示
旋转矢量 A
t0(M0,P0)
t (M,P)
A M
t M 0
A
o x PP0 x
y
vm t
π
an
2
A
o a v x
t
9.
矢端M
运动性质
匀速率 圆周运动
投影点P 关系
简谐振动 合与分
角速度(逆) 角频率 数值相等
( t+ ) t 时角位置 相位
3
2o
图(a) A1
x
对(a)图 x2超前x1 (2-1)≤
(b)图 x1 超前 x2 /2 或 x2滞后 x1 /2 A2 图(b)
12.
如 x(22kk1)
同相 “步调一致”
K0,1,2,
x 反相 “步调相反”
x
A1
o A2
o
x
A1
t
o A2
o
t
12 0
5. t 或
10,2
A
如振子由初始状态 ( x0=-A/2 回到平衡位置(第一次)
t 或( t + )
dt vm
周期性函数
ad2xA 2cots()
dt2
am
d. 推广 — 角谐振动( < 5° )( 9-3 )
4.
[例] 证明下列振动仍为简谐振动,并求固有量(k, )
(1)将弹簧振子竖直悬挂,已知平衡时弹簧 伸长量为l0
(2)如图所示,两弹簧串联,水平面光滑
k
k1
k2
m
l0 m
分析:
0.080.04 o 0.04 0.08
a. 先求运动方程(三要素) ,其中 为关键
解析法
b. 和t 求解
如 :
旋转矢量法
解析法 由 x00.0 40.0c8o s
π
3
旋矢法 v 由0 旋 矢A 图si n 0 判s 断 i n 0 π3 Aπ
x/m
知 π 3
o3
0.04 0.08
讨论:
动力学分析 — 判断振动性质,求固有量
(动和静)平衡位置,偏离量x ( )、力(矩)分析…
5.
二.简谐运动的运动学描述
1.振幅 A
最大位移 A xmax 表征能量
2.周期与频率
xAcost()A co (ts T [) ]A co ts (2 )
x
比较 T2
A
即 2π 2
T
o
Tt
T
A
2
单位时间,全振动次数的2倍
叠加
简谐运动
复杂振动
分解
理想模型
一维平动 — 弹簧振子 一维转动 — 复摆(含单摆)
2.
9-1 简谐运动 振幅 周期与频率 相位
一.简谐运动
弹簧振子(一维平动
k l0
F
mm
集中质量+弹性系统)
A o xA x
以平衡位置为原点、建立图示坐标系
偏离x FFkx 动力学方程 等
k:劲度系数、一般为振动常数
、T、 — 固有量,取决振动系统动力学特征
弹簧振子固有周期 T 2π m k
6.
3. 相位 x
由前知 v f[ (t ) ]“ t ” — t 时状态(相)
a
xAcos t()
x = A ,v = 0 t2k k = 0,1,2,…
x = 0 ,v < 0
t2k
2
x =-A ,v = 0 t2k
价
ddt22xm k x2x 运动微分方程
判 别
:角频率
2 k — 系统属性
m
式
xAcos t() 运动方程
A、 :积分常数 — 初始条件
3.
注 a. x — 平衡位置 量度
b. k、 — 固有性质 与初始条件无关
A、 — 初始条件 与固有性质无关
c.
xAcost ()
vdxAsi nt ()
3
1161t
第一次到达次 x 2 A 处相位
2
P
2 1 o
t2
1
1.414 x(cm)
2 2
A
4
讨论: 比较:解析法、旋矢法、相位法
16.
9-3 单摆和复摆
一.复摆 (物理摆) — 一维角谐振动模型
,
v0<0)
A
P
A/2
o
由旋矢图知 t5
Ax
32 6
6. 谐振动合成( 9-5)
由此 与 t 可互求 13.
三.谐振动的运动学分析
1. 已知运动方程→ 一系列物理量
2. 由已知条件→运动方程(确定三要素) →其它物理量
[例1] 一质量为0.01 kg的物体作简谐运动,其振 幅为0.08 m,周期为4 s,起始时刻物体在 x = 0.04 m 处,向ox 轴负方向运动(如图).试求: (1) t=1.0 s时,物体所处的位置和所受的力;
15.
[例2] 一简谐运动的 x – t 曲线,如图所示,求:
(1) 初相 ;(2) 求运动方程,并用旋矢表示之;
(3) 第一次到达 x 2 A 处的速度和 x(cm)
2
加速度。
2
分析: a. 简便路径: 用旋矢法求
o
1
1
t (s )
和 ,并结合相位法求第三问
b. 旋矢图
2
A0
A1
由图知
2