微机原理课程设计--电梯控制
电梯控制器的课程设计

电梯控制器的课程设计一、课程目标知识目标:1. 学生能理解电梯控制器的基本原理和功能,掌握其内部结构和操作流程。
2. 学生能描述电梯控制系统的基本组成部分,包括传感器、控制器、执行器等。
3. 学生了解电梯控制器的安全性能和故障处理方法。
技能目标:1. 学生能运用所学知识分析电梯控制系统的故障,并提出合理的解决方案。
2. 学生能通过实际操作,熟练使用电梯控制器进行楼层呼叫和运行控制。
3. 学生具备一定的团队合作能力,能在小组讨论中积极参与,共同解决问题。
情感态度价值观目标:1. 学生培养对电梯控制技术的好奇心和探索精神,提高对工程技术的兴趣。
2. 学生认识到电梯控制器在现代生活中的重要性,增强社会责任感和安全意识。
3. 学生通过课程学习,培养严谨、认真、细致的学习态度,提高自我管理和自主学习能力。
课程性质:本课程为技术学科,结合实际生活中的电梯控制系统,使学生掌握相关知识,提高实践操作能力。
学生特点:六年级学生具备一定的逻辑思维和动手能力,对新鲜事物充满好奇心,善于合作与交流。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,强调学生的主体地位,提高学生的操作技能和解决问题的能力。
在教学过程中,关注学生的个体差异,引导他们积极参与,确保课程目标的实现。
通过课程学习,使学生在知识、技能和情感态度价值观方面均取得具体的学习成果。
二、教学内容1. 电梯控制器原理:讲解电梯控制器的基本工作原理,包括电梯运行过程中的信号处理、逻辑判断和指令输出等。
2. 电梯控制器结构:介绍电梯控制器的内部结构,包括传感器、控制器、执行器等组成部分,以及它们之间的相互关系。
3. 电梯控制系统操作流程:详细讲解电梯控制系统的操作流程,如楼层呼叫、电梯响应、门控等。
4. 安全性能与故障处理:分析电梯控制器的安全性能,介绍常见的故障类型及其处理方法。
5. 实践操作:安排学生进行电梯控制器的实际操作,包括楼层呼叫、电梯运行控制等,巩固理论知识。
微机综合课程设计,模拟电梯控制系统
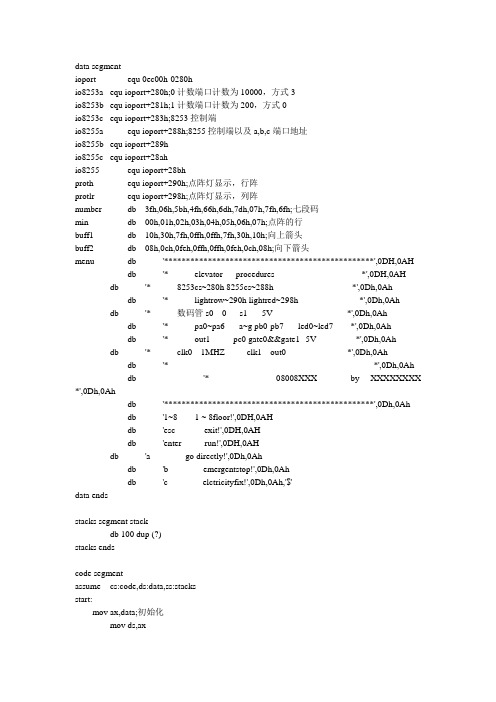
data segmentioport equ 0ec00h-0280hio8253a equ ioport+280h;0计数端口计数为10000,方式3io8253b equ ioport+281h;1计数端口计数为200,方式0io8253c equ ioport+283h;8253控制端io8255a equ ioport+288h;8255控制端以及a,b,c端口地址io8255b equ ioport+289hio8255c equ ioport+28ahio8255 equ ioport+28bhproth equ ioport+290h;点阵灯显示,行阵protlr equ ioport+298h;点阵灯显示,列阵number db 3fh,06h,5bh,4fh,66h,6dh,7dh,07h,7fh,6fh;七段码min db 00h,01h,02h,03h,04h,05h,06h,07h;点阵的行buff1 db 10h,30h,7fh,0ffh,0ffh,7fh,30h,10h;向上箭头buff2 db 08h,0ch,0feh,0ffh,0ffh,0feh,0ch,08h;向下箭头menu db '************************************************',0DH,0AH db '* elevator procedures *',0DH,0AH db '* 8253cs~280h 8255cs~288h *',0Dh,0Ah db '* lightrow~290h lightred~298h *',0Dh,0Ah db '* 数码管s0---0 s1-----5V *',0Dh,0Ah db '* pa0~pa6-----a~g pb0-pb7-----led0~led7 *',0Dh,0Ahdb '* out1--------pc0 gate0&&gate1--5V *',0Dh,0Ah db '* clk0---1MHZ clk1---out0 *',0Dh,0Ah db '* *',0Dh,0Ahdb '* 08008XXX by XXXXXXXX *',0Dh,0Ahdb '************************************************',0Dh,0Ahdb '1~8------1 ~ 8floor!',0DH,0AHdb 'esc----------exit!',0DH,0AHdb 'enter--------run!',0DH,0AHdb 'a------------go directly!',0Dh,0Ahdb 'b------------emergentstop!',0Dh,0Ahdb 'c------------elctricityfix!',0Dh,0Ah,'$'data endsstacks segment stackdb 100 dup (?)stacks endscode segmentassume cs:code,ds:data,ss:stacksstart:mov ax,data;初始化mov ds,axmov dx,offset menu;打印菜单,说明硬件电路的连接等mov ah,09int 21hmov dx,io8255;8255初始化,a、b输出,c口输入mov al,89hout dx,almov bl,31h;bl代表当前电梯所在楼层,初始值设为1main: mov al,0call shownumber;显示当前楼层mov cl,0;cl为第一次输入的要去的楼层mov ch,0;ch为在中途中再次输入的要去的楼层call showledmov ah,01;通过键盘输入第一次要去得楼层clint 21hcmp al,1bh;是esc则退出je exitcmp al,31h;键入的数字是否在1-8之间,如不是重新输入jl maincmp al,38hjg mainmov cl,alcall showled;8个led灯显示cl对应的楼层cmp cl,bl;cl与bl比较je main;相等则返回重新输入jg up;大于则向上运行jl todown;小于则向下运行exit: mov ah,4chint 21h;---------------------------------------------------------------------------------电梯上行up: call panduan;电梯上行的情况up1: add bl,1call updelay;调用向上运行延时子程序,出现向上的箭头call shownumber;调用显示子程序,通过数码管显示当前楼层blcmp bl,cl;bl,cl不等则继续je main;相等则返回jmp up1upgetch:mov ah,1;在上升过程中如果有其他的键按下时int 21hcmp al,62h;判断是否为急停键bje jitcmp al,63h;判断是否为断电待修键cje noelccmp al,31h;数字是否在1-8之间如不是继续上行jl gotoupcmp al,38hjg gotoupmov ch,alcall showledcall delayupcall shownumbercall clequbl;判断当前楼层与第一次要去的楼层是否相同cmp ch,bl;比较ch与bl的区别je stopupcl;相等则在该层停,等待运行信号输入jl upcldownch;ch小于bl则先上行至cl在下行至chcmp ch,cl;ch大于bl则在判断ch与cl的大小关系je jmpupcl;相等则一直上行至cljl upchupcl;ch大于bl小于cl则先上行到ch在上行到cljg toupclupch;ch大于cl则先上行到cl在上行到chgotoup: call delayupjmp up1noelc: mov al,0;上升时遇到了断电的情况,则等待键入,除非再次键入的为c才继续运行mov ah,7int 21hcmp al,63hjne noelccall delayupcall shownumberjmp up1jit: call delayup;上升时遇到了急停的情况,则停在下一层,然后回到main call shownumberjmp maintodown: jmp downupdelay proc near;向上运行的延时子程序call delayfirst;用于初始化8253push dxcall dianqing ;调用使其能够清零updelay1:call dianshang;循环调用向上的箭头显示mov ah,1;键盘是否有输入int 16hjne upgetch;如有则跳转到输入处理mov dx,io8255c;8255c口输入,看2s延时是否结束in al,dxand al,01;是否计时结束jz updelay1pop dxretupdelay endptomain: jmp maintoupclupch:jmp upclupch;---------------------------------------------------------------------------------上行中遇到的各种情况列举stopupcl:call shownumber;第二次要去得楼层与当前楼层相同,直接停在该层mov ch,0call showledcall stop2call upcljmp mainupcldownch:call showled;先上行到cl再下行到chcall upclmov cl,0call showledcall stop2call downchjmp mainjmpupcl:mov ch,0;第二次要去的楼层与第一次要去的相同,直接上行到第一次要取得楼层call showledcall upcljmp mainupchupcl:call showled;同方向的楼层,先上行到ch再上行到clcall upchmov ch,0call showledcall stop2call upcljmp mainupclupch:call showled;同方向的楼层,先上行到cl再上行到chcall upclmov bl,0call showledcall stop2call upchjmp mainjittt: jmp jit;----------------------------------------------------------电梯下行,与电梯上行的情况基本类似,稍作修改即可down: call panduandown1: sub bl,1call downdelaycall shownumbercmp bl,clje tomainjmp down1downgetch:mov ah,1cmp al,62hje jit1cmp al,63hje noelc1cmp al,31hjl gotodowncmp al,38hjg gotodownmov ch,alcall showledcall delaydowncall shownumbercall clequblcmp ch,blje stopdowncljg downclupch;ch大于bl则先下行至cl在上行至chcmp ch,cl;ch小于bl则在判断ch与cl的大小关系je jmpdowncl;相等则一直下行至cljl downcldownch;ch小于bl小于cl则先下行到cl在下行到chjg todownchdowncl;ch大于cl则先下行到ch在下行到clgotodown:call delaydownjmp down1noelc1: mov al,0;下降遇到了断电的情况,则等待键入,除非再次键入的为c才继续运行mov ah,7int 21hcmp al,63hjne noelc1call delaydowncall shownumberjmp down1jit1: call delaydown;下降时遇到了急停的情况,则停在下一层,然后回到main call shownumberjmp maindowndelay proc near;向下运行延时子程序,与向上运行延时子程序大体相同call delayfirstpush dxcall dianqing;调用使其能够清零ddy: call dianxia;循环调用向下的箭头显示mov ah,1int 16hjne downgetchmov dx,io8255cin al,dxjz ddypop dxretdowndelay endptodownchdowncl:jmp downchdowncl;---------------------------------------------------------------------------------下行中遇到的各种情况列举stopdowncl:call showledmov ch,0call showledcall stop2call downcljmp maindownclupch:call showledcall downclmov cl,0call showledcall stop2call upchjmp mainjmpdowncl:mov ch,0call showledcall downcljmp maindowncldownch:call showledcall downclmov cl,0call showledcall stop2call downchjmp maindownchdowncl:call showledcall downchmov ch,0call showledcall stop2call downcljmp main;--------------------------------------------------------------------电梯上、下行中遇到的各种情况处理方法jitt: jmp jitttclequbl proc near ;判断当前楼层与第一次要去的楼层的关系cmp cl,bljne backje clequchmov cl,0call shownumbercall showledcall stop2cmp ch,bljg upchherejl downchhere upchhere:call upchjmp main downchhere:call downchjmp mainclequch:mov ch,0call showledcall onlydelay;jmp mainback: retclequbl endpupcl proc near;上行到cl的子程序upcl1: add bl,1call dirdelay1call shownumbercmp bl,cljl upcl1retupcl endpjitt1: jmp jit1upch proc near;上行到ch的子程序upch1: add bl,1call dirdelay1call shownumbercmp bl,chjl upch1retupch endpdowncl proc near;下行到cl的子程序downcl1:sub bl,1call dirdelay2call shownumbercmp bl,cljg downcl1retdowncl endpdownch proc near;下行到ch的子程序downch1:sub bl,1call dirdelay2call shownumbercmp bl,chjg downch1retdownch endp;----------------------------------------------------------------------直接上下行时对按键情况的处理stop2 proc near;没有直达键的暂停子程序gostop2:mov al,0mov ah,1int 21hcmp al,13jne gostop2mov al,0retstop2 endpdirgetch1:mov ah,1;直接上行对按键的处理int 21hcmp al,63hje dirnoelc1cmp al,62hje jit21jmp dirback1dirgetch2:mov ah,1;直接下行对按键的处理int 21hcmp al,63hje dirnoelc2cmp al,62hje jit22jmp dirback2jit21: call delayup;call shownumberjmp mainjit22: call delaydown;call shownumberjmp maindirnoelc1:mov al,0;直接上行时遇到了断电待修的情况mov ah,1int 21hcmp al,63hjne dirnoelc1call delayup;call shownumberjmp dirback1dirnoelc2:mov al,0;直接下行时遇到了断电待修的情况mov ah,1int 21hcmp al,63hjne dirnoelc2call delaydown;call shownumberjmp dirback2tojit: jmp jittdirdelay1 proc near;直接上行的延时子程序call delayfirstpush dxcall dianqingdirback1:call dianshang;mov ah,1int 16hjne dirgetch1mov dx,io8255cin al,dxand al,01jz dirback1pop dxretdirdelay1 endptojit1: jmp jitt1dirdelay2 proc near;直接下行的延时子程序call delayfirstpush dxcall dianqingdirback2:call dianxia;mov ah,1int 16hjne dirgetch2mov dx,io8255cin al,dxand al,01jz dirback2pop dxretdirdelay2 endp;----------------------------------------------------------------------直达情况的处理panduan proc near;判断是否为直达键,如果是就直接到达,如果为enter正常执行next1: mov al,0mov ah,1int 21hcmp al,61h;是否为直达键je zhidacmp al,13jne next1mov al,0retpanduan endpzhida: cmp cl,bljl zhidadownjg zhidaupjmp mainzhidadown:call delaydownsub bl,1call zhidadelay2call shownumberjmp zhidazhidaup:call delayupadd bl,1call zhidadelay1call shownumberjmp zhidazhidabutton1:mov ah,1;直达对按键情况的处理,在上升时跳到此处int 21hcmp al,63hje zhidanoelc1cmp al,62hje tojitjmp zhidazhidabutton2:mov ah,1;直达对按键情况的处理,在下降时跳到此处int 21hcmp al,63hje zhidanoelc2cmp al,62hje tojit1jmp zhidazhidanoelc1:mov al,0;上升时遇到断电待修时mov ah,1int 21hcmp al,63hjne zhidanoelc1call delayup;call shownumberjmp zhidazhidanoelc2:mov al,0;下降时遇到断电待修时mov ah,1int 21hcmp al,63hjne zhidanoelc2call delaydown;call shownumberjmp zhidazhidadelay1 proc near;直达延时程序call delayfirstpush dxcall dianqingnext21: call dianshang;mov ah,1int 16hjne zhidabutton1mov dx,io8255cin al,dxand al,01jz next21pop dxretzhidadelay1 endpzhidadelay2 proc near;直达延时程序call delayfirstpush dxcall dianqingnext22: call dianxia;mov ah,1int 16hjne zhidabutton2mov dx,io8255cin al,dxand al,01jz next22pop dxretzhidadelay2 endp;------------------------------------------------------------------------------判断延时是否结束以及8253初始化delayfirst proc near;初始化8253的子程序,两计数器连级,接入1MHZ的脉冲,2s每次第二个out接pc0push dxmov dx,io8253c;8253的计数器0置方式3mov al,36hout dx,almov dx,io8253a;计数器0初始值为10000mov ax,10000out dx,almov al,ahout dx,almov dx,io8253c;8253的计数器1置方式0mov al,70hout dx,almov dx,io8253b;计数器1初始值为200mov ax,200out dx,almov al,ahout dx,alpop dxretdelayfirst endponlydelay proc near;判断延时时是否结束的子程序,注意由于点阵灯的显示要写进循环中,所以分类,该延时仅用于延时push dxdelayx: mov dx,io8255cin al,dx ;查询8255的Pc0是否为高电平and al,01jz delayxpop dxretonlydelay endpdelayup proc near;判断上升延时是否结束的子程序,包括了显示向上箭头的部分push dxcall dianqingdelayy: call dianshangmov dx,io8255cin al,dx ;查询8255的Pc0是否为高电平and al,01jz delayypop dxretdelayup endpdelaydown proc near;判断下降延时是否结束的子程序,包括了显示向下箭头的部分push dxcall dianqingdelayz: call dianxiamov dx,io8255cin al,dx ;查询8255的Pc0是否为高电平and al,01jz delayzpop dxretdelaydown endp;----------------------------------------------------------------------------------------------显示的子程序dianqing proc near;用于对点阵显示的清零,在第一次要循环前使用push dxpush axmov al,00mov dx,protlrout dx,alpop axpop dxdianqing endpdianshang proc near;点阵箭头的显示,向上箭头的显示子程序push cxpush axpush bxmov cx,0008hmov si,offset minmov ah,01movex: mov al,[si]mov bx,offset buff1xlat ;得到第一行码mov dx,prothout dx,almov al,ahmov dx,protlrout dx,al ;显示第一行红shl ah,01inc sipush cxmov cx,0ffffhdelayp: loop delayp ;延时pop cxloop movexpop bxpop axpop cxretdianshang endpdianxia proc near;点阵箭头的显示,向下箭头的显示子程序push cxpush axpush bxmov cx,0008hmov si,offset minmov ah,01movey: mov al,[si]mov bx,offset buff2xlat ;得到第一行码mov dx,prothout dx,almov al,ahmov dx,protlrout dx,al ;显示第一行红shl ah,01inc sipush cxmov cx,0ffffhdelayq: loop delayq ;延时pop cxloop moveypop bxpop axpop cxretdianxia endpshownumber proc near;用七段码显示当前楼层的子程序(a口输出)mov dl,blmov ah,2int 21h;用于在屏幕上显示mov dl,0dhmov ah,2;回车符int 21hmov dl,0ahmov ah,2;换行符int 21hsub bl,30h;七段码显示mov al,blpush bxpush dxmov bx,offset numberxlatmov dx,io8255aout dx,alpop dxpop bxadd bl,30hmov al,0retshownumber endpshowled proc near;8led显示,显示cl与ch对应的楼层,从8255b口输出push axcmp cl,0hje l0cmp cl,31hje l1cmp cl,32hje l2cmp cl,33hje l3cmp cl,34hje l4cmp cl,35hje l5cmp cl,36hje l6cmp cl,37hje l7cmp cl,38hje l8l0: mov al,0bjmp addledl1: mov al,1bjmp addledl2: mov al,10bjmp addledl3: mov al,100bjmp addledl4: mov al,1000bjmp addledl5: mov al,10000bjmp addledl6: mov al,100000bjmp addledl7: mov al,1000000bjmp addledl8: mov al,10000000bjmp addledaddled: cmp ch,0je h0cmp ch,31hje h1cmp ch,32hje h2cmp ch,33hje h3cmp ch,34hje h4cmp ch,35hje h5cmp ch,36hje h6cmp ch,37hje h7cmp ch,38hje h8h0: add al,0bjmp showh1: add al,1bjmp showh2: add al,10bjmp showh3: add al,100bjmp showh4: add al,1000bjmp showh5: add al,10000bjmp showh6: add al,100000bjmp showh7: add al,1000000bjmp showh8: add al,10000000bjmp showshow: push dxmov dx,io8255b ;8255b口输出out dx,alpop dxpop axmov al,0ret showled endp code ends end start。
电梯控制plc课程设计

电梯控制plc课程设计一、教学目标本课程旨在通过学习电梯控制PLC(可编程逻辑控制器)的相关知识,让学生掌握PLC的基本原理、编程方法和应用技巧。
通过本课程的学习,学生将能够理解PLC的工作原理,熟练使用PLC进行编程和控制,具备分析和解决实际问题的能力。
1.掌握PLC的基本组成原理和各部分功能。
2.熟悉PLC编程语言和指令系统。
3.了解PLC在电梯控制中的应用和实例。
4.能够使用PLC进行简单的控制系统设计和编程。
5.具备对PLC程序进行调试和故障排除的能力。
6.能够运用PLC技术解决实际工程问题。
情感态度价值观目标:1.培养学生的创新意识和团队合作精神。
2.增强学生对新技术的学习兴趣和热情。
3.培养学生的工程责任感和职业道德。
二、教学内容本课程的教学内容主要包括PLC的基本原理、编程方法和电梯控制系统的应用。
教学大纲如下:1.PLC概述:介绍PLC的定义、发展历程和分类。
2.PLC的组成原理:讲解PLC的硬件结构和软件系统。
3.PLC编程语言:介绍PLC的编程语言和指令系统。
4.PLC编程方法:讲解PLC程序的设计方法和技巧。
5.电梯控制系统:介绍电梯控制系统的基本原理和PLC在电梯控制中的应用。
6.电梯控制程序设计:通过实例讲解电梯控制程序的设计过程。
三、教学方法为了提高学生的学习兴趣和主动性,本课程将采用多种教学方法,包括讲授法、讨论法、案例分析法和实验法等。
1.讲授法:通过讲解和演示,使学生掌握PLC的基本原理和编程方法。
2.讨论法:学生进行小组讨论,培养学生的团队合作精神和创新意识。
3.案例分析法:通过分析实际案例,使学生了解PLC在电梯控制中的应用。
4.实验法:安排实验室实践环节,让学生动手操作,提高实际操作能力。
四、教学资源为了支持本课程的教学内容和教学方法的实施,我们将选择和准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供系统的学习资料。
2.参考书:提供相关的参考书籍,丰富学生的知识体系。
电梯微机原理课程设计
电梯微机原理课程设计一、课程目标知识目标:1. 学生能够理解电梯微机原理的基本概念,掌握电梯控制系统的组成及其功能。
2. 学生能够描述电梯运行的常见信号流程,了解电梯故障诊断的基本方法。
3. 学生掌握电梯速度、加速度及制动力等关键参数的计算与应用。
技能目标:1. 学生能够运用所学知识,分析电梯运行过程中可能出现的故障,并提出合理的解决方案。
2. 学生能够设计简单的电梯控制系统,运用编程实现电梯的基本功能。
3. 学生通过实际操作,掌握电梯维护保养的基本技能,提高实践操作能力。
情感态度价值观目标:1. 学生对电梯微机原理产生兴趣,培养主动学习和探究的精神。
2. 学生认识到电梯安全运行的重要性,增强安全意识,养成遵守规范的良好习惯。
3. 学生通过小组合作,培养团队协作精神,提高沟通与交流能力。
课程性质:本课程为电气工程及其自动化专业选修课,旨在帮助学生掌握电梯微机原理及控制技术。
学生特点:学生具备一定的电气基础知识,对电梯控制技术有一定了解,但实践经验不足。
教学要求:结合理论与实践,注重培养学生的动手能力和创新能力,提高学生分析问题、解决问题的能力。
通过本课程的学习,使学生能够将理论知识应用于实际工作中,为未来从事电梯行业及相关领域工作奠定基础。
二、教学内容1. 电梯概述:电梯的发展历程、分类及主要技术参数。
教材章节:第一章 电梯概述2. 电梯控制系统:电梯控制系统的组成、工作原理及功能。
教材章节:第二章 电梯控制系统3. 电梯微机原理:微机在电梯控制中的应用,微机控制系统硬件、软件设计。
教材章节:第三章 电梯微机原理4. 电梯运行控制算法:电梯速度、加速度、制动力等参数的计算与应用。
教材章节:第四章 电梯运行控制算法5. 电梯故障诊断与维修:电梯故障分类、诊断方法及维修措施。
教材章节:第五章 电梯故障诊断与维修6. 电梯安全与防护:电梯安全系统设计,防护措施及安全规范。
教材章节:第六章 电梯安全与防护7. 电梯控制系统设计:电梯控制系统的设计方法、步骤及实例。
电梯控制技术课程设计

电梯控制技术课程设计一、课程目标知识目标:1. 让学生理解电梯控制技术的基本原理,掌握电梯系统的主要组成部分及功能。
2. 使学生掌握电梯运行的常用控制算法,如速度控制、位置控制等。
3. 帮助学生了解电梯安全与故障处理的相关知识,提高电梯运行的安全意识。
技能目标:1. 培养学生运用所学知识分析和解决实际电梯控制问题的能力。
2. 提高学生设计电梯控制系统的实践操作能力,能独立完成电梯控制系统的搭建和调试。
3. 培养学生团队协作和沟通能力,能在项目中进行有效分工与合作。
情感态度价值观目标:1. 激发学生对电梯控制技术及自动化领域的兴趣,培养其探索精神。
2. 培养学生严谨的科学态度,注重实践与理论相结合,提高解决问题的能力。
3. 增强学生安全意识,使其在实际工作中能够关注电梯运行的安全与稳定。
课程性质:本课程为理论与实践相结合的课程,注重培养学生的动手能力和实际操作技能。
学生特点:学生具备一定的电子、电气基础知识,对电梯控制技术有一定了解,但实践经验不足。
教学要求:结合课程性质、学生特点,采用项目式教学,以实践为主,理论为辅,注重培养学生的实际操作能力和团队协作能力。
通过课程学习,使学生能够达到上述课程目标,为未来从事电梯控制及相关领域工作打下坚实基础。
二、教学内容1. 电梯概述:介绍电梯的发展历程、分类及在我国的应用现状,使学生了解电梯行业的基本情况。
- 教材章节:第一章 电梯概述2. 电梯结构与原理:讲解电梯的各主要部件结构、功能及工作原理,为学生深入学习电梯控制技术打下基础。
- 教材章节:第二章 电梯结构与原理3. 电梯控制系统:学习电梯控制系统的组成、工作原理及常用控制算法,提高学生分析和解决实际问题的能力。
- 教材章节:第三章 电梯控制系统4. 电梯速度与位置控制:详细介绍电梯速度和位置控制方法,使学生掌握电梯运行过程中的关键控制技术。
- 教材章节:第四章 电梯速度与位置控制5. 电梯安全与故障处理:讲解电梯安全措施、故障诊断及处理方法,增强学生的安全意识。
电梯控制系统的课程设计
电梯控制系统的课程设计一、课程目标知识目标:1. 学生能理解电梯控制系统的基本构成和原理,掌握电梯运行过程中涉及的关键技术。
2. 学生能够描述电梯控制系统中的传感器、执行器、控制单元等组件的作用及相互关系。
3. 学生了解电梯控制系统的安全规范和行业标准。
技能目标:1. 学生能够运用所学知识,分析并解决电梯运行过程中可能出现的故障问题。
2. 学生通过小组合作,设计并搭建一个简单的电梯控制系统模型,提高动手实践能力。
3. 学生能够运用相关软件对电梯控制系统进行仿真测试,优化系统性能。
情感态度价值观目标:1. 学生通过学习电梯控制系统,培养对现代智能交通系统的兴趣,提高科学素养。
2. 学生在课程学习中,树立安全意识,关注电梯乘坐安全问题,提高社会责任感。
3. 学生通过小组合作,培养团队协作精神,提高沟通与交流能力。
课程性质:本课程为高二年级电子技术及应用课程的一部分,旨在让学生了解电梯控制系统的基本原理,提高学生的实际操作能力和创新能力。
学生特点:高二学生在电子技术方面已有一定的基础,对实际操作和创新活动有较高的兴趣。
教学要求:结合学生的特点和课程性质,注重理论与实践相结合,提高学生的动手实践能力和解决实际问题的能力。
在教学过程中,关注学生的个体差异,鼓励学生积极参与,培养团队协作精神。
通过本课程的学习,使学生能够将所学知识应用于实际生活,提高学生的综合素质。
二、教学内容本章节教学内容主要包括以下几部分:1. 电梯控制系统概述:介绍电梯控制系统的基本概念、发展历程、应用领域及未来发展趋势。
2. 电梯控制系统组成:详细讲解电梯控制系统的各个组成部分,包括传感器、执行器、控制单元、人机交互界面等,并分析各部分的功能和相互关系。
3. 电梯控制原理:阐述电梯运行过程中的控制原理,包括速度控制、位置控制、群控系统等,结合教材案例分析实际应用。
4. 电梯控制系统设计:介绍电梯控制系统设计的基本流程、方法和注意事项,引导学生运用所学知识进行实际设计。
plc课程设计四层电梯控制

plc课程设计四层电梯控制一、教学目标本节课的教学目标是让学生掌握PLC电梯控制系统的原理和编程方法。
知识目标要求学生了解电梯的基本工作原理和PLC的工作原理,掌握电梯控制系统的硬件组成和软件编程。
技能目标要求学生能够独立完成电梯控制系统的硬件接线和编程,能够对电梯控制系统进行调试和维护。
情感态度价值观目标要求学生培养对电梯控制系统的兴趣,提高学生动手实践能力和团队合作意识。
二、教学内容本节课的教学内容主要包括电梯的基本工作原理、PLC的工作原理、电梯控制系统的硬件组成和软件编程。
首先,介绍电梯的基本工作原理,包括电梯的运行原理、电梯的楼层控制原理等。
然后,介绍PLC的工作原理,包括PLC的硬件组成、PLC的编程语言等。
接下来,介绍电梯控制系统的硬件组成,包括电梯的驱动系统、电梯的控制系统等。
最后,介绍电梯控制系统的软件编程,包括电梯控制系统的程序设计、电梯控制系统的调试和维护等。
三、教学方法本节课的教学方法采用讲授法、讨论法、案例分析法和实验法相结合。
首先,通过讲授法向学生介绍电梯的基本工作原理和PLC的工作原理。
然后,通过讨论法让学生分组讨论电梯控制系统的硬件组成和软件编程。
接下来,通过案例分析法分析实际电梯控制系统的运行情况,让学生深入了解电梯控制系统的运行原理。
最后,通过实验法让学生动手实践,独立完成电梯控制系统的硬件接线和编程,提高学生的动手实践能力。
四、教学资源本节课的教学资源包括教材、参考书、多媒体资料和实验设备。
教材和参考书用于为学生提供系统的理论知识,帮助学生了解电梯的基本工作原理和PLC的工作原理。
多媒体资料用于为学生提供直观的图像和动画,帮助学生更好地理解电梯控制系统的硬件组成和软件编程。
实验设备用于让学生动手实践,独立完成电梯控制系统的硬件接线和编程,提高学生的动手实践能力。
五、教学评估本节课的教学评估主要包括平时表现、作业和考试三个部分。
平时表现占30%,主要评估学生的课堂参与度、提问回答和团队协作等情况。
电梯简单控制课程设计

电梯简单控制课程设计一、课程目标知识目标:1. 让学生理解电梯的基本工作原理,掌握电梯的简单控制系统的组成及功能。
2. 使学生掌握电梯运行中速度、位置等基本参数的控制方法。
3. 帮助学生了解电梯安全运行的相关知识,如限速器、安全钳等。
技能目标:1. 培养学生运用所学知识,分析并解决电梯控制过程中遇到的问题。
2. 提高学生动手实践能力,能独立完成简单的电梯控制电路搭建和调试。
3. 培养学生团队合作意识,通过小组合作完成电梯控制系统的设计。
情感态度价值观目标:1. 激发学生对电梯控制技术的兴趣,培养其探索精神和创新意识。
2. 培养学生关注电梯安全问题,提高安全意识,树立正确的价值观。
3. 引导学生认识到科技发展对生活的影响,增强其社会责任感和使命感。
本课程针对初中年级学生,结合课程性质、学生特点和教学要求,将目标分解为具体的学习成果。
通过本课程的学习,期望学生能够掌握电梯基本原理,提高实践操作能力,培养安全意识和团队合作精神,为今后的学习和发展奠定基础。
二、教学内容1. 电梯基本原理:介绍电梯的组成、工作原理及分类,涉及课本第三章第一节内容。
- 电梯的组成:驱动装置、控制系统、轿厢、对重、导轨等。
- 工作原理:曳引、驱动、升降、对重平衡等。
- 电梯分类:乘客电梯、载货电梯、无机房电梯等。
2. 电梯控制系统:讲解电梯控制系统的构成、功能及分类,涉及课本第三章第二节内容。
- 控制系统构成:控制柜、控制器、操作盘、显示屏等。
- 功能及分类:速度控制、位置控制、群控系统等。
3. 电梯控制电路:学习电梯控制电路的搭建和调试,涉及课本第三章第三节内容。
- 控制电路元件:接触器、继电器、开关、传感器等。
- 搭建和调试:动手实践,掌握控制电路的连接和调试方法。
4. 电梯安全运行:介绍电梯安全装置及运行中的注意事项,涉及课本第三章第四节内容。
- 安全装置:限速器、安全钳、门锁、超载保护等。
- 注意事项:运行速度、载重、维护保养等。
电梯控制技术课程设计
电梯控制技术课程设计一、课程目标知识目标:1. 理解电梯控制系统的基本原理,掌握电梯运行的机械与电子控制系统组成;2. 学习电梯控制程序设计的基础知识,了解电梯调度算法;3. 了解电梯安全规范及相关法律法规。
技能目标:1. 能够分析电梯控制系统的电路图,识别并解释各部分功能;2. 学会使用模拟软件设计简单的电梯控制程序,实现电梯的基本运行功能;3. 能够运用所学知识解决电梯运行中的常见问题,具备初步的故障排查能力。
情感态度价值观目标:1. 培养学生对工程技术学科的兴趣,激发其探究电梯控制技术的热情;2. 培养学生的团队协作意识,使其在项目实施过程中学会分工合作;3. 增强学生的安全意识,使其认识到遵守电梯安全规范的重要性。
课程性质:本课程为高年级工程技术课程,旨在帮助学生将理论知识与实际应用相结合,提高学生的实践操作能力。
学生特点:学生具备一定的电子技术和编程基础,具有较强的逻辑思维能力和动手能力。
教学要求:结合教材内容,注重理论与实践相结合,强调学生的主体地位,鼓励学生积极参与课堂讨论和实践活动。
通过课程学习,使学生能够达到上述具体、可衡量的学习成果。
后续教学设计和评估将以此为基础,不断优化课程内容和教学方法。
二、教学内容1. 电梯控制系统原理:包括电梯机械系统、电气系统的工作原理及相互配合,介绍电梯的主要部件及其功能。
教材章节:第二章“电梯的构造与原理”2. 电梯控制程序设计:学习电梯控制系统的编程方法,掌握常用电梯调度算法(如SCAN、FCFS等)。
教材章节:第三章“电梯控制技术”3. 电梯控制电路分析:分析电梯控制系统的电路图,识别并解释各部分电路的功能及其相互关系。
教材章节:第四章“电梯控制系统电路分析与设计”4. 电梯安全规范与故障排查:了解电梯安全规范,学习电梯故障排查方法,提高学生的实际操作能力。
教材章节:第五章“电梯安全规范与故障处理”5. 实践操作:运用模拟软件进行电梯控制程序设计,实现电梯的基本运行功能,并进行故障排查。
电梯控制plc课程设计

电梯控制plc课程设计一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本原理和在电梯控制系统中的应用。
2. 学生能掌握电梯控制系统中常用的PLC编程指令和程序设计方法。
3. 学生能了解电梯控制系统的安全要求和行业标准。
技能目标:1. 学生能运用PLC进行简单的电梯控制程序编写和调试。
2. 学生能够分析电梯控制系统的故障原因,并提出合理的解决方案。
3. 学生通过小组合作,能够完成一个电梯控制PLC课程设计项目,提高实际操作能力。
情感态度价值观目标:1. 学生对PLC技术及其在电梯控制领域的应用产生兴趣,培养主动学习的态度。
2. 学生在课程设计中,增强团队合作意识,学会倾听、沟通、协作。
3. 学生关注电梯控制系统的安全性和可靠性,树立安全意识,培养社会责任感。
课程性质:本课程为实践性较强的课程,结合理论知识与实际操作,培养学生的动手能力和创新能力。
学生特点:学生具备一定的电子技术基础和编程能力,对新技术充满好奇,喜欢动手实践。
教学要求:教师需注重理论与实践相结合,引导学生主动参与课程设计,培养解决实际问题的能力。
在教学过程中,关注学生的个体差异,鼓励学生互相学习,共同进步。
通过课程目标的实现,使学生在知识、技能和情感态度价值观方面取得具体的学习成果。
二、教学内容1. PLC基本原理:介绍PLC的组成、工作原理、性能特点,结合教材第二章内容,让学生了解PLC在工业控制中的应用。
2. 电梯控制系统概述:分析电梯控制系统的基本要求、结构和功能,参考教材第三章,了解电梯控制系统的分类及发展趋势。
3. PLC编程指令与程序设计:学习PLC的基本编程指令,如逻辑运算、定时器、计数器等,结合教材第四章,让学生掌握电梯控制程序的设计方法。
4. 电梯控制PLC程序编写与调试:根据教材第五章内容,教授学生如何编写和调试电梯控制程序,培养实际操作能力。
5. 电梯控制系统故障分析与解决方案:结合教材第六章,让学生学会分析电梯控制系统故障原因,并提出合理的解决方案。
微机原理课程设计--电梯控制

微机原理课程设计 (1) (1) (1)(一)电梯的工作方式 (1)(二)总体设计思路 (2)(三)系统硬件电路设计 (3)1、设计结构 (3)2、模块分析 (3)3、画出响应的电路图 (4)(四)软件设计 (4)1.主要设计模块要求 (5)2.程序流程图 (5)(1)主程序框图 (5)(2)中断服务程序框图 (6)(3)电梯算法流程图 (7).........................11........................1920........................21微机原理课程设计1 .学会用微机原理;2.掌握计算机对输入信号检测和输出控制的基本方法;3 .掌握常用按钮、发光二极管的使用方法。
4.提高学生的动手能力,达到理论和实践密切结合。
1. 课设内容首先了解电梯运行规律,我们结合实际假设电梯的几种运行情况:(1)若当前电梯停在某层(七段码显示相应楼层,7个LED 全灭)。
键入1~9数字键,如键入的数字与当前电梯停层同,则不产生动作;若不同则相应楼层的LED亮;如再按运行键,则电梯自动判别上升或者下降(在运行过程中七段码显示楼层变化)向来到达希望停的楼层(七段码显示该楼层,相应LED亮);(2)若当前电梯正在上升或者下降运行中(此时七段码显示楼层变化,LED指示希翼抵达的楼层);若键入新的希翼停的楼层数字(相应的LED亮),则对同方向(上升或者下降)未到的楼层能停,对其它情况则先停原来按下的楼层,然后按运行键后继续运行)。
有如下几种情况:电梯当前在3层,向上运行,LED 指示希翼在5层停,此时若键入3,则电梯将在5楼停(同方向),若再按运行键,则继续运行至7层停;键入的不是5而是7,则电梯将先停在7层,再按运行键,运行至7层停;键入的不是7 (或者5),而是1,则电梯先停在7层(先达同方向楼层)。
再按运行键,运行至1层停。
2.连接路线并行接口电路选择8255芯片,七段数码管、LED 指示灯连接路线由学生自己设计,可参考实验指导书的相关内容。
模拟电梯控制系统-微机原理课程设计

沈阳航空航天大学课程设计报告课程设计名称:微机系统综合课程设计课程设计题目:模拟电梯控制系统院(系):计算机学院专业:计算机科学与技术班级:学号:姓名:指导教师:完成日期:2013年7月9日目录第1章总体设计方案 (1)1.1课程设计的内容和要求 (1)1.2课程设计原理 (2)1.3实验环境 (2)第2章详细设计方案 (3)2.1硬件设计 (3)2.2主程序设计 (3)2.3功能模块的设计与实现 (4)2.3.1 电梯调度子程序 (4)2.3.2 发出中断扫描时间程序 (5)2.3.3 中断子程序 (6)2.3.4 LED显示程序 (7)第3章结果测试及分析 (8)3.1结果测试 (8)3.2结果分析 (8)参考文献 (9)附录(源程序) (10)第1章总体设计方案1.1 课程设计的内容和要求一、课程设计内容:用键盘、按键、八段码和LED模拟电梯的工作过程,具体内容如下:1.键盘数字键1~8用来键入希望停的楼层,并用八段数码管显示;2.使用8个LED指示电梯当前所在楼层;3.设计两个按键分别表示人上、下电梯,每按一次上或下一人,每上下一人,都要设置目的地址;4.电梯正常运行时以每2秒1层的速度上升或下降。
若无请求就继续按原方向运行,上升和下降要有指示。
二、课程设计要求:1.独立完成课程设计任务;2.通过老师当场验收;3.交出完整的课程设计报告。
1.2 课程设计原理本设计利用8255,8253,8259,8279芯片,发光二极管,八段数码管和键盘模拟电梯的工作过程。
运用8253芯片产生20ms的脉冲给中断提供中断信号,8259芯片主要用于中断处理, 8279芯片用于扫描键盘和显示所在楼层,8255芯片主要用于信号的输入输出。
程序运行时,用键盘的“-”和“+”号表示电梯上和下的选择状态,利用八段数码管显示目的楼层,8个发光二极管显示电梯的运行状态。
初始状态时,电梯处在第一层,等待电梯的人选择“+”后,电梯打开电梯门等待选择按下按键1~8并显示在八段数码管上,按下后电梯开始运行,发光二极管右移逐个点亮直至目的楼层停止。
微机控制电梯
对曳引机进行速度控制,效率高,节能,并具有 减少电动机发热等优点. 控制和管理部分均由CC-CPU控制,控制部分 控制和管理部分均由CC-CPU控制,控制部分 的主要功能是对选层器,速度图形和安全检查电 路三方面进行控制.管理部分的主要功能是负责 处理电梯的各种运行. VFCL系统的ST-CPU系统是串行传输系统,它 VFCL系统的ST-CPU系统是串行传输系统,它 的优点是无论楼层多高,传输线只有六根.主要 是利用载波传输.
3.三微机控制式,也称为多微机 控制方式.例如上海三菱的VFCL 控制方式.例如上海三菱的VFCL 系统,即采用三个CPU来控制电梯, 系统,即采用三个CPU来控制电梯, 它的基本控制原理如图4 它的基本控制原理如图4.
VFCL系统由三部分组成: VFCL系统由三部分组成:
4,群控电梯的微机控制方式
使用微机对群控电梯进行控制,方 式也各有不同,使用微机的数量也有 所不同. 例如: 例如:天津奥的斯电梯公司引进的 E401电梯的控制系统,使用16位微处 E401电梯的控制系统,使用16位微处 理器,使用CPU的数量是根据每组电梯 理器,使用CPU的数量是根据每组电梯 轿厢的数量,按2n+1的比例增加,如 轿厢的数量,按2n+1的比例增加,如 果再加上人工语言合成和直观显示等, CPU的数量还要多. CPU的数量还要多.
此种控制还包括,位置传感器, 转速传感器,负荷传感器,以便向 控制系统,拖动系统提供信息,使 电梯平稳运行,并完成各种特殊功 能的控制.
电梯控制技术课程设计

电梯控制技术课程设计一、课程设计概述电梯控制技术是现代电梯的重要组成部分,掌握电梯控制技术将对电梯的安全运行和性能提升起到关键作用。
本课程设计旨在通过设计一个具有多层楼、多电梯的电梯控制系统,让学生们深入了解电梯控制技术的原理和应用,并学会使用MATLAB进行模拟仿真。
二、设计内容1.设计一个三层楼、两部电梯的控制系统,其中每层楼的电梯开关门、往返上下运动、超载保护等均可通过系统远程控制。
2.学生需要使用MATLAB进行系统仿真,验证设计方案的可行性,并根据仿真结果对控制系统进行优化。
3.学生需要完成控制系统的基本设计,包括电路设计、程序设计、系统测试等等。
三、设计流程1. 设计梯控板电路图学生需要首先设计电路图,确定电路的整体架构,包括输入电路、输出电路以及控制器的选择和配合。
电路图设计完成后,需要进行实际制作并测试。
2. 程序设计在电路测试合格后,学生需要进行程序设计。
程序需要能够实现电梯的上下运动、门的开关,以及超载保护等功能。
除此之外,根据仿真结果进行优化,如在节省能耗的同时提高运行效率等等。
3. 仿真与测试程序设计完成后,学生需通过MATLAB进行仿真,并根据仿真结果对程序进行调整。
仿真结果需要考虑多种情况,如电梯运行顺序、电梯是否超载等等。
测试合格后,学生需进行系统整体实验,验证控制系统的性能和稳定性。
四、设计结果通过本次课程设计,学生将掌握电梯控制技术的基本原理和应用,熟练运用MATLAB进行模拟仿真。
并通过设计三层楼、两部电梯的控制系统,学生具备了实际的电路和程序设计能力,为以后的学习和工作打下坚实的基础。
五、结语本次课程设计是电梯控制技术的基础课程,为学生今后的学习和工作奠定了坚实的基础。
希望同学们能够认真学习本课程,深入了解和运用电梯控制技术的知识,在今后的工作中能发挥更大的作用。
电梯控制系统课程设计
电梯控制系统课程设计一、课程目标知识目标:1. 让学生理解电梯控制系统的基础知识,掌握其工作原理和关键部件的功能。
2. 使学生掌握电梯控制系统的设计流程,了解不同类型电梯的控制策略。
3. 帮助学生了解电梯控制系统相关的安全规范和标准。
技能目标:1. 培养学生运用所学知识分析和解决实际电梯控制问题的能力。
2. 提高学生设计电梯控制系统的方案并进行模拟调试的能力。
3. 培养学生查阅资料、团队协作和沟通表达的能力。
情感态度价值观目标:1. 培养学生对电梯控制系统及工程技术领域的兴趣,激发他们的求知欲。
2. 培养学生严谨认真、一丝不苟的科学态度,提高他们的工程素养。
3. 引导学生关注电梯安全,增强社会责任感和使命感。
分析课程性质、学生特点和教学要求,将课程目标分解为以下具体学习成果:1. 学生能够描述电梯的基本结构、工作原理及关键部件的作用。
2. 学生能够根据实际需求,设计合适的电梯控制方案并进行模拟调试。
3. 学生能够通过查阅资料、团队协作,撰写电梯控制系统设计报告。
4. 学生能够在课堂上积极参与讨论,主动分享自己的观点和经验。
5. 学生能够关注电梯安全,提高安全意识,自觉遵守相关规范和标准。
二、教学内容本章节教学内容依据课程目标,紧密结合课本,确保科学性和系统性。
具体安排如下:1. 电梯基本结构与原理- 介绍电梯的组成部分,如曳引机、导轨、轿厢、对重等。
- 阐述电梯的工作原理,包括曳引、导向、轿厢和对重平衡等。
2. 电梯控制系统设计流程- 分析电梯控制系统的设计步骤,如需求分析、方案设计、硬件选型、软件编程等。
- 结合教材章节,讲解不同类型电梯的控制策略。
3. 电梯控制系统的安全规范与标准- 引导学生了解我国电梯安全规范和相关标准。
- 分析电梯控制系统在设计过程中应考虑的安全因素。
4. 电梯控制系统设计与模拟调试- 指导学生运用所学知识,设计简单的电梯控制方案。
- 组织学生进行模拟调试,验证方案的可行性。
微机控制电梯课件

引入物联网、人工智能等技术,实现电梯智能化管理,提高运行效 率和服务质量。
特殊场所电梯控制系统
如医院、地铁站等场所,根据实际需求设计专用电梯控制系统。
04
软件编程与实现技 巧
软件编程环境搭建
01
02
03
开发工具选择
介绍适用于微机控制电梯 系统的开发工具,如Keil 、IAR等。
开发环境配置
微机控制系统在电梯中应用
电梯控制系统
微机控制系统在电梯中主要应用 于电梯控制系统,实现对电梯的 自动检测、控制、调节和管理。
电梯门机系统
微机控制系统还应用于电梯门机系 统,实现对电梯门的自动开关、防 夹等功能。
电梯安全保护系统
微机控制系统通过传感实时监测 电梯的运行状态,当电梯出现故障 或异常情况时,及时采取措施进行 保护。
电梯功能
电梯的主要功能是实现楼层之间 的便捷、快速、安全运输,提高 建筑物的使用效率。
电梯基本结构组成
01
02
03
04
曳引系统
包括电动机、减速器、制动器 等,负责驱动电梯运行。
导向系统
包括导轨、导靴等,确保电梯 在垂直方向上的稳定运行。
门系统
包括轿厢门、层门等,确保乘 客安全进出电梯。
控制系统
包括电气控制系统、PLC控制 系统等,实现电梯的自动化控
制和运行。
工作原理及运行过程
工作原理
电梯的工作原理是基于电动机驱动的曳引系统,通过钢丝绳或钢带与曳引轮之间的摩擦力,实现电梯轿厢的升降 运动。同时,导向系统确保电梯在垂直方向上的稳定运行,门系统确保乘客安全进出电梯,控制系统实现电梯的 自动化控制和运行。
运行过程
乘客通过层门进入电梯轿厢,按下目的楼层按钮,电梯开始运行。在运行过程中,电梯会根据控制系统发出的指 令,自动完成加速、减速、平层等动作,将乘客安全送达目的楼层。到达目的楼层后,电梯会自动打开门,乘客 走出电梯轿厢。
电梯控制系统课程设计-概述说明以及解释
电梯控制系统课程设计-概述说明以及解释1.引言1.1 概述电梯控制系统作为现代城市生活中不可或缺的一部分,扮演着极为重要的作用。
随着城市化进程的加快和人口密度的增大,对电梯控制系统提出了更高的要求。
电梯控制系统课程设计旨在帮助学生深入了解电梯控制系统的原理和应用,掌握电梯控制系统的设计方法和技术要点,提高学生的实际动手能力和综合应用能力。
在本次课程设计中,我们将围绕电梯控制系统的基本原理、设计要点和实践应用展开深入的研究和讨论,旨在为学生提供一个系统、全面的学习平台,培养学生的理论基础和实践能力。
通过本次课程设计,学生将能够对电梯控制系统有一个更为深入的了解,为日后在电梯控制系统工程领域的发展奠定坚实的基础。
1.2 文章结构文章结构包括引言、正文和结论三部分。
引言部分概述了文章的主题和内容,介绍了电梯控制系统课程设计的背景、重要性和目的。
正文部分包括了电梯控制系统概述、课程设计要点和设计实践与应用三个部分,详细介绍了课程设计的相关知识和技术要点。
结论部分对课程设计进行总结与回顾,展望了课程设计的成果,并分享了学习收获。
整个文章结构清晰,层次分明,能够让读者对电梯控制系统课程设计有一个全面的了解。
1.3 目的本课程设计的目的在于通过学生对电梯控制系统的学习和实践,培养其对电梯控制系统的理论和技术应用能力。
通过本课程设计的学习,学生可以掌握电梯控制系统的基本原理和设计方法,提高自己的动手能力和工程实践能力,为将来从事相关领域的工作做好充分准备。
同时,通过动手实践,学生还能够培养团队合作意识和沟通能力,提高解决问题的能力和创新能力,为将来的工程实践打下坚实基础。
最终达到培养学生的工程实践能力和创新能力,为学生的职业发展和社会需求做出贡献。
2.正文2.1 电梯控制系统概述电梯作为现代都市生活中不可或缺的交通工具,其控制系统的设计和运行对于人们的日常生活和安全至关重要。
电梯控制系统是一种通过控制电梯的运行,使其能够按照乘客的需求安全、高效地运行的系统。
plc电梯控制系统课程设计

plc电梯控制系统课程设计一、课程目标知识目标:1. 让学生掌握PLC电梯控制系统的基本原理,理解其工作流程及各部分功能。
2. 使学生了解电梯控制系统中常用的传感器、执行器及其在系统中的作用。
3. 帮助学生掌握PLC编程的基本方法,能运用相关指令编写简单的电梯控制程序。
技能目标:1. 培养学生运用所学知识分析电梯控制系统中问题的能力,能对简单故障进行诊断与修复。
2. 提高学生动手实践能力,能独立完成PLC电梯控制系统的接线、编程与调试。
3. 培养学生团队协作和沟通能力,能在小组项目中发挥个人优势,共同完成项目任务。
情感态度价值观目标:1. 激发学生对电气工程及自动化领域的兴趣,培养其探索精神。
2. 培养学生严谨、细致的学习态度,提高其工程素养。
3. 引导学生关注电梯安全问题,培养其社会责任感和职业道德。
本课程针对高年级学生,结合课程性质、学生特点和教学要求,将目标分解为具体的学习成果。
通过本课程的学习,学生能够掌握PLC电梯控制系统的基本知识和技能,培养解决实际问题的能力,同时提升团队协作和沟通能力,形成正确的价值观。
为实现这一目标,课程将采用理论教学与实践操作相结合的教学方法,确保学生学以致用,为今后的学习和工作打下坚实基础。
二、教学内容1. PLC电梯控制系统概述:介绍PLC的基本概念、发展历程、应用领域,以及电梯控制系统的基本原理和结构组成。
教材章节:第一章 绪论2. 电梯控制系统硬件:讲解电梯控制系统中常用的传感器、执行器、控制器等硬件设备,以及其选型与接线方法。
教材章节:第二章 硬件系统3. PLC编程技术:介绍PLC编程的基本指令、编程软件的使用方法,以及电梯控制程序的设计与编写。
教材章节:第三章 PLC编程技术4. 电梯控制程序设计:分析电梯控制系统的功能需求,设计电梯控制程序,包括召唤、选层、运行、开门、关门等环节。
教材章节:第四章 电梯控制程序设计5. PLC电梯控制系统调试与故障诊断:讲解系统调试的方法和步骤,分析常见故障现象及其原因,掌握故障诊断与修复技巧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、课设目的 (1)二、课设内容与要求 (1)三、电梯设计的具体实现 (1)(一)电梯的工作方式 (1)(二)总体设计思路 (2)(三)系统硬件电路设计 (3)1、设计结构 (3)2、模块分析 (3)3、画出响应的电路图 (4)(四)软件设计 (4)1.主要设计模块要求 (5)2.程序流程图 (5)(1)主程序框图. (5)(2)中断服务程序框图 (6)(3)电梯算法流程图 (7)四、实现程序 (11)五、设计体会 (19)六、附录 (20)七、参考资料 (21)一、课设目的1.学会用微机原理;2.掌握计算机对输入信号检测和输出控制的基本方法;3.掌握常用按钮、发光二极管的使用方法。
4.提高学生的动手能力,达到理论和实践紧密结合。
二、课设内容与要求1. 课设内容首先了解电梯运行规律,我们结合实际假设电梯的几种运行情况:(1)若当前电梯停在某层(七段码显示相应楼层,7个LED 全灭)。
键入1~9数字键,如键入的数字与当前电梯停层同,则不产生动作;若不同则相应楼层的LED亮;如再按运行键,则电梯自动判别上升或下降(在运行过程中七段码显示楼层变化)一直到达希望停的楼层(七段码显示该楼层,相应LED亮);(2)若当前电梯正在上升或下降运行中(此时七段码显示楼层变化,LED指示希望抵达的楼层);若键入新的希望停的楼层数字(相应的LED亮),则对同方向(上升或下降)未到的楼层能停,对其它情况则先停原来按下的楼层,然后按运行键后继续运行)。
有如下几种情况:电梯当前在3层,向上运行,LED 指示希望在5层停,此时若键入3,则电梯将在5楼停(同方向),若再按运行键,则继续运行至7层停;键入的不是5而是7,则电梯将先停在7层,再按运行键,运行至7层停;键入的不是7(或5),而是1,则电梯先停在7层(先达同方向楼层)。
再按运行键,运行至1层停。
2.连接线路并行接口电路选择8255芯片,七段数码管、LED 指示灯连接线路由学生自己设计,可参考实验指导书的相关内容。
楼层数字键和运行按钮都可由PC机键盘代替3.编写程序4.调试程序。
汇编、连接后执行程序,观察电梯运行情况。
三、电梯设计的具体实现(一)电梯的工作方式电梯工作按以下方式运行:1.假设当前电梯停在某层(LED显示相应楼层,5个发光二极管全灭)。
键入数字键,如键入的数字与当前电梯停靠层相同,则什么也不做,若不同则相应楼层的发光二极管亮;电梯自动判别上升或下降(在运行过程中用八段码来显示楼层变化)一直到达希望停的楼层(八段码显示该楼层,相应LED 灭)。
2.假设当前电梯正在上升或下降运行(此时八段码显示楼层变化,LED 指示希望抵达的楼层),若键入新的希望停靠的楼层数字(相应的LED 亮),则对同方向(上升或下降)未到的楼层能停靠,对其它情况则先停靠原先希望停的楼层,然后继续运行)。
如下几例:1)设电梯当前在2层,向上运行,LED指示希望在4层停,此时若键入3,则电梯将在3楼停,然后继续运行至4层停;2)同上情况,若键入的不是3而是5,则电梯将先停在4层,然后运行至5层停;3)同上情况,若键入的不是3(或5),而是1,则电梯先停在4层,然后运行至1层停。
(二)、总体设计思路本设计主要是利用微机应用实验平台来模拟电梯的运行,用到了平台上的一个非编码键盘、LED显示器、八段数码管等模块。
有5个楼层,需要用5个按键模拟电梯中的请求按钮,用5个按键模拟5个楼层每层向上请求的按钮,再用5个模拟5个楼层每层向下请求的按钮。
非编码键盘有16个键,可以用1-5号键模拟电梯内的按钮,用6-0号键模拟每层向上请求的按纽,A-E 模拟每层向下请求的按纽。
当电梯静止状态时,无论外部哪一层有请求,电梯都由静止状态转入向上或向下运行的状态,直到到达请求的楼层;当电梯处于向上运行的状态时,此时高于该楼层向上的请求和内部请求级别最高,其次是所有楼层向下的请求,再次是低于该楼层向上的请求;当电梯处于向下运行的状态时则情况相反。
由于中断级别在随着电梯所处楼层的不同而变化,而且中断源比较多。
所以用每一个中断源直接和中断控制器相连,需要用到多个8259A级联,很不方便。
为解决这个问题,首先定义三个单字节变量REQ_U、REQ_D和REQ_IN分别存储电梯每一层向上、向下和内部的请求,每一个变量用低5位,每一位代表一层。
例如,REQ_U为00000110B,这代表在2层和3层有向上的请求。
8253定时器每隔20ms产生一次中断,中断程序便去执行扫描键盘,当扫描到有电梯内部或者外部按键时,将请求存储到变量中。
每到一个状态时再检查请求变量REQ_U、REQ_D和REQ_IN的值,根据电梯的运行方向和变量中的请求,来决定电梯下一步的运行。
设电梯的当前楼层为floor(floor=1~7),运行方向为dir (dir=0,向上;dir=1,向下),在电梯运行的工程中,用数码管输出floor值显示当前的楼层。
LED输出REQ_IN的值显示电梯内已经请求的楼层。
(三)、系统硬件电路设计由于采用了PC机资源和微机实验平台,不需要其他的硬件电路。
利用了微机平台上的8253定时/计数器、8255并行接口单元、LED单元、非编码键盘、数码管显示单元等等。
系统结构框图,如图1所示。
1、设计结构:2、图1 系统结构框图2、模块分析:(1)可编程定时/计数器8253定时/计数器8253主要是用于定时20ms ,触发中断进行键盘扫描。
电路连线是CLOCK0接Q6,分频后频率为46875Hz ,OUT0接中断IRQ2,每20ms 中断一次,GATE0接5v 。
计数器的初值应该是3A9H 。
(2)8255并行接口单元8255主要是用于键盘的扫描和发光二极管的数据输出。
所以用8255A 口的低7位接7个发光二极管,B 口低4位接非编码键盘的列线,高4位接键盘的行线。
(3) LED 显示系统虽然只用了1格LED 显示器,但为了数字更新更方便,主程序更加简单,故此系统选用动态显示方式。
由于系统的软件部分Q6 IRQ2 5V clk0 8253 GA TE0 OUT0 A 口 8255 B 口 C 口 LED 显示 模块 CS0 CS1 CS2 CS37个发光二极管 非编码键盘 片选的运行时的核心程序是一直循环的,因此显示程序也是在循环过程中一直被调用,从而实时地被显示出来。
(4)非编码键盘本系统采用的是行反转法来扫描键盘的,调用键盘扫描的程序TESTKEY后,程序中的变量KEY的值就是按下的键的值,如果KEY为0FFH则表示无键盘输入,为0~15 则按照上往下从左往右的顺序分别代表每一个按键按下的信息。
不过此扫描程序没有考虑到多个按键同时按下的情况。
又因为模拟电梯的按键一般不会有两个按键同时按下的情况,所以,多个按键的情况可以不予考虑。
3、画出相应的电路图:图2 电路原理图(四)、软件设计本设计的软件设计的思路:通过软件编程使8253输出定时信号申请中断,在中断服务程序中扫描键盘,如果有按键,修改相应的变量位,并输出内部请求变量REQ_IN到发光二极管显示当前的内部请求楼层。
在主程序中,查询变量的值,根据电梯调度算法运行电梯。
1.主要设计模块要求程序主要包括以下主要模块:键盘扫描程序、LED显示程序、电梯调度算法。
1)键盘扫描程序:采用的是行反转法来扫描键盘的,相应的程序设计请参考实验指导书上实验3中的相关介绍。
2)LED显示程序:本设计只用到了一个LED,只要将floor转换为相应的段码。
先输出位码,再输出段码,循环输出就可以动态显示。
为了循环的显示,将LED显示程序放在中断服务程序中。
相应的程序设计请参考实验指导书上实验3中的相关介绍。
3)电梯调度算法:在设计时将电梯一次从下到上视为一次运行(注意不一定从底层到顶层),同理,电梯一次从上到下也视为一次运行(注意不一定从顶层到底层)。
当电梯向上运行时:a)位于当前层以下的向上请求都被忽略留到下次向上运行时处理。
b)位于当前层以上的向上请求都被记录留到此次运行处理。
c)无论哪层的向下请求都被忽略留到下次向下运行时处理。
当电梯向下运行时:a)位于当前层以上的向下请求都被忽略留到下次向下运行时处理。
b)位于当前层以下的向下请求都被记录留到此次运行处理。
c)无论哪层的向上请求都被忽略留到下次向上运行时处理。
2.程序流程图1)主程序框图:图3 主程序框图2)中断服务程序框图:图4 中断服务程序框图3)电梯算法流程图:其中,dir代表电梯的运行方向,0代表电梯向上运行,1代表向下运动。
设REQ_U(n)代表第n层向上的请求,同样,REQ_D(n) 代表第n层向下的请求,REQ_IN(n) 代表第n层内部的请求。
求next 的方法为:电梯向上时,next为内部请求的最小值和向上请求的大于floor的最小值之间的小者。
电梯向下时,next为内部请求的最大值和向下请求中小于floor的最大值之间的大者。
没有满足要求的时返回0。
电梯算法流程图:图5 电梯算法流程图四、实现程序FNUM MACROLOCAL ML1PUSH CXPUSH AXPUSH DXPUSH SIMOV CH,13HMOV CL,31HMOV SI,9ML1: MOV AH,02H ;MOV DH,CHMOV DL,1FHINT 10HMOV AH,02HMOV DL,CLINT 21HDEC CHINC CLDEC SIJNZ ML1POP SIPOP DXPOP AXPOP CXENDMSITUATION MACRO NOWFLOCAL L1,L2,L3,L4,L5,L6,L7,L8,PASS1 MOV AH,03HINT 10HFNUMMOV AH,02HINT 10HMOV SI,101HL0: MOV AH,0CHMOV DX,LASTF MOV CX,SIMOV AL,0INT 10HINC SICMP SI,120H JNE L0MOV BH,1HMOV SI,100H L1: MOV AH,0CH MOV DX,20H MOV CX,SIMOV AL,BHINT 10HADD SI,1HINC BHCMP SI,120H JNE L1MOV SI,20H MOV BH,1HL2: MOV AH,0CH MOV DX,SIMOV CX,100H MOV AL,BHINT 10HADD SI,1HINC BHCMP SI,9BH JNE L2MOV SI,100H MOV BH,1HL3: MOV AH,0CH MOV DX,9BH MOV CX,SIMOV AL,BHINT 10HINC BHINC SICMP SI,120HJNE L3MOV SI,20HMOV BH,1HL4: MOV AH,0CHMOV DX,SIMOV CX,120HMOV AL,BHINT 10HADD SI,1HINC BHCMP SI,9BHJNE L4MOV FLAG1,1MOV DI,NOWF ;NOWFLOORMOV SI,101HL5: MOV AH,0CHMOV DX,DIMOV CX,SIMOV AL,1INT 10HINC SICMP SI,120HJNE L5ENDMMOVEF MACRO NOWF,LASTFLOCAL L1,L2,L3,L4,L5,L6,L7,PASS1 MOV BH,1HMOV SI,100HL1: MOV AH,0CHMOV DX,20HMOV CX,SIMOV AL,BHINT 10HADD SI,1HINC BHCMP SI,120HJNE L1MOV SI,20HMOV BH,1HL2: MOV AH,0CHMOV DX,SIMOV CX,100HMOV AL,BHINT 10HADD SI,1HINC BHCMP SI,9BHJNE L2MOV SI,100HMOV BH,1HL3: MOV AH,0CHMOV DX,9BHMOV CX,SIMOV AL,BHINT 10HINC BHINC SICMP SI,120HJNE L3MOV SI,20HMOV BH,1HL4: MOV AH,0CHMOV DX,SIMOV CX,120HMOV AL,BHINT 10HADD SI,1HINC BHCMP SI,9BHJNE L4MOV FLAG1,1MOV DI,NOWF ;NOWFLOORL6: MOV SI,101HL5: MOV AH,0CHMOV DX,DIMOV CX,SIMOV AL,1INT 10HINC SICMP SI,120HJNE L5MOV AX,FLAG1CMP AX,1JNE PASS1XOR AX,AXMOV FLAG1,AXMOV AH,09HMOV DX,OFFSET MSGEN INT 21HMOV DX,OFFSET MSG3 INT 21HMOV AH,01HINT 21HPASS1:MOV BX,06FFHMOV CX,0FFFFH TIME: LOOP TIMEDEC BXCMP BX,0JNE TIMEMOV SI,101HL7: MOV AH,0CHMOV DX,DIMOV CX,SIMOV AL,0INT 10HINC SICMP SI,120HJNE L7MOV AX,NOWFCMP AX,LASTFJA PASS2INC DIJMP PASS3PASS2: CMP AX,LASTFJNE PASS4JMP PASS3PASS4: DEC DIPASS3:CMP DI,LASTF ;LASTFLOORJNE L6MOV SI,101HENDMDATA SEGMENTMSG1 DB 'FLOOR YOU SIT NOW(JUST 1-9F):$' MSG2 DB 'FLOOR YOU WANT GO(JUST 1-9F):$' MSG3 DB 'INPUT ANY KEY TO START...$'MSG4 DB 'WANT EXPERIENCE AGAIN (Y/N)..$' MSGEN DB 0AH,0DH,'$'NOWF DW ?LASTF DW ?FLAG1 DW 1DATA ENDSSTACK SEGMENTBUFS DB 100 DUP(?)TOPS LABEL WORDSTACK ENDSCODE1 SEGMENTASSUME CS:CODE1, DS:DATA, SS:STACKMAIN PROCDSEG SEGMENTTABLE DB 40H,06H,5BH,4FH,66H,6DH,7DH,07H DSEG ENDSCSEG SEGMENTASSUME CS:CSEG,DS:DSEGSTART: MOV AX,DSEGMOV DS,AXMOV AL,82HMOV DX,9003HLEA BX,TABLEOUT DX,ALMOV DX,8004HMOV AX,0000HMOV SI,AXMOV AL,[BX+SI]OUT DX,ALMOV AL,02HMOV DX,8002HOUT DX,ALMOV AL,0FFHMOV DX,9003HOUT DX,ALMOV AL,00HMOV DX,9003HOUT DX,AL;---------------------------- MOV CX, 500L1: MOV DX,8004HMOV AX,0005HMOV SI,AXMOV AL,[BX+SI]OUT DX,ALMOV AL,01HMOV DX,8002HOUT DX,ALCALL DELAYMOV DX,8004HMOV AX,0000HMOV SI,AXMOV AL,[BX+SI]OUT DX,ALMOV AL,02HMOV DX,8002HOUT DX,ALCALL DELAYLOOP L1MOV DX,8004H MOV AL,00HOUT DX,ALMOV AL,00HMOV DX,8002H OUT DX,AL DELAY PROCPUSH BXPUSH CXMOV BL,1 NEXT: MOV CX,1167 W10MS: LOOP W10MSDEC BLJNZ NEXTMOV DX,8004H MOV AL,00HOUT DX,ALMOV AL,00HMOV DX,8002H OUT DX,ALPOP CXPOP BX RETDELAY ENDPCSEG ENDSEND START五、设计体会在以前没有这方面锻炼的我,当知道要做课程设计的时候心里面感觉有些害怕和担心,担心自己不会或者做不好。