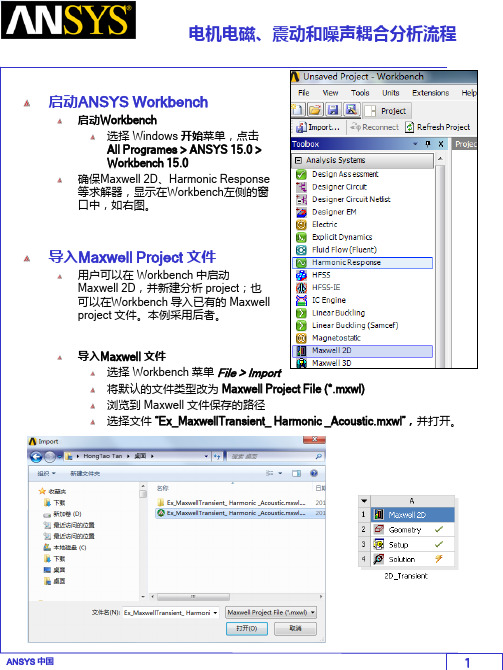
异步电机ANSYS电磁场计算程序
Ansys电机电磁震动和噪声分析流程
Maxwell 分析模型介绍
分析模型为 Prius 电机的二维分析模型。 瞬态分析模型的各项设置已经设置好。 如需要详细了解如何设置电机的瞬态分析模型,请查看其他相关培训文件。
定子铁心
Phase C Phase B 转子 轴 Phase A Phase C
磁钢
Maxwell 模型修改
为了精确分析定子齿部的径向电磁力,并将力密度的分布耦合到后续的谐响应分 析中。需要将定子齿部“分割”出来,并施加更细密的网格剖分。
调整仿真时间与步长
双击 Projects 管理窗口上的 Analysis>Setup1 设置仿真停止时间 Stop Time 为10ms 设置时间步长 Time Step 为 50us 点击 OK
激活瞬态电磁场与谐响应分析的耦合分析选项
激活瞬态电磁场与谐响应分析耦合分析选项 点击菜单Maxwell2D > Enable Harmonic Force Calculation 在弹出的Enable Harmonic Force Coulping 窗口中, 1. 选中Enable Force Calculation, 2. 在每一个齿尖模型的选择框中,打勾如下图。 3. 点击 OK 。 Maxwell将会在最后一个完整周期, 计算每一个选中物体的瞬时电磁力, 并通过傅里叶分析,转化成频域的 电磁力数据,频率范围是从直流到 DC to 1/(2*dT).
在弹出的 Element Length Based Refinement 窗口中, 1. 将 Name 改成 Length_ToothTips 2. Restrict length of Elements: 3. Maximum Length of Elements: 0.25 mm 4. 点击 OK 改善曲线网格剖分 选中所有的物体( Ctrl + A) 点击菜单 Maxwell 2D > Mesh Operations > Assign > Surface
ANSYS电机磁场分析
2009-06-02 18:58 by:有限元来源:广州有道有限元ANSYS软件是世界上著名的大型通用有限元分析计算软件,具有强大的求解器和后处理功能,为我们解决复杂、庞大的工程项目和致力于高水平的科研攻关提供了一个良好的工作平台,更使我们从繁琐单调的常规有限元分析计算中解脱出来。
无轴承异步电机是在普通电机的定子中再嵌入悬浮控制绕组,通过悬浮绕组磁场对原有绕组磁场的作用,改变了气隙磁场的对称分布,将在转子上产生可控磁悬浮力,实现了转子的悬浮运行。
因此,讨论无轴承电机的运行机理,必须从分析电机中的电磁力着手。
无轴承异步电机中转子受到了洛仑兹力和麦克斯韦力两种不同的电磁力。
计算的方法通常有等效磁路法、近似解析法、位势磁通法和有限元法。
在磁场分布和变化比较复杂且非线性严重的情况下,有限元法精度最高,而使用ANSYS软件既保证了有限元分析的高精度,又大大降低了计算量。
本文所讨论的无轴承异步电机具有非线性饱和磁路,磁场变化复杂。
因此,非常适合用ANSYS进行分析。
1 A NSYS软件简介ANSYS软件有以下特点:使用方便、涉及面广、易学易用,高效方便的绘图功能,灵活多样的剖分网格形状,疏密程度,多种可选择的迭代求解器,强大的后处理功能。
1.1 A NSYS电磁场分析ANSYS程序可用来分析电磁场多方面问题,如电感、电容、磁通量密度、涡流、电场分布、磁力线、力等。
可有效地分析多种设备,如发电机、电动机、螺线管传动器、开关等。
ANSYS程序提供了丰富的线性和非线性材料的表达方式,包括各向同性或正交各向异性的线性磁导率,材料的B.H曲线和永磁体的退磁曲线。
后处理功能允许用户显示磁力线、磁通密度和磁场强度并进行力、力矩、源输入能量、端电压和其它参数的计算。
1.2 A NSYS软件的分析计算步骤(1)创建无轴承异步电机有限元分析模型;(2)定义和分配材料,网格剖分;(3)施加边界条件和载荷,并求解;(4)查看并保存计算结果。
基于Ansys的异步牵引电机电磁场分析

很好 的一致性 , 证明所建场路耦合模型的正确性 , 为异步牵 引电机 的优化设 计提 供了理论性指 导。 关键词 异步 牵引电机 ; 电磁场 ; 有限 元 ; ny A ss
中图分类号 T 0 . 文献标 识码 A 文章 编号 10 -2 1 2 0 ) 30 1 - M3 1 2 0 87 8 I 08 0 -0 80 - 4
北京交通大学电气工程 学院, 北京 (oo4 1o4 )
摘 要 随着我 国高速 铁路 的快速 发展 , 对异 步牵 引 电机 的运行 性能 提 出了越 来越 高 的要 求, 为进一步优化异步牵 引电机 的性能 , 就需 要准确 计算异 步牵 引 电机 内 电磁 场的分 布和 特性 。 应用场路 耦合 法 , 在忽略定转子端部对 电磁 场分 布影响 的前提下 , 立了异 步牵 引电机 电磁场 分 建 析 的场路 耦合模 型。基于所建模 型 , 利用 A ss ny软件对 一台三相 4 极异 步牵 引 电机进 行二维 电磁
to t r in mo o .
Ke r s As n h o o s ta to tr lcr ma ei ed;fn t l me t An y wo d y c r n u c n mo o ;e e to g t f l i ie ee n ; — r i n ci
维普资讯
ቤተ መጻሕፍቲ ባይዱ
防爆 电机
( X L SO E P O I N—P O FE E T I C I E) R O L C R C MA H N
第 40 8 20
3卷 (
器3期 1)
基 于 A ss ny 的异 步 牵 引 电机 电磁 场 分 析
基于ANSYS的异步电动机电磁场分析

力线分市囝;从凰中可以看出,空载时.电动机的磁力 线分布较好。在堵转状态下.转于导条顶部的磁力线 分布非常密集.即存在严重的集肤效应。
因为电机定、转于的感应电动势吼q都是*最瞄
为变量,离散求解区域.建立一个一组非线性方程组进 行进代求解.最后得出电机求解区域电磁场分布。
41谐波磁场分析
BH磁化曲耋3}l”.并且在分析中考虑了场量的时同谐 波的影响.能更精确的考虑磁饱和。其计算时间虽然 比谐波分析更长.但与通用的时步有限元瞬态分析相 比,已有较大的缩短。本文在进行伪静止瞬态分析时, 将时同步长设置为o(101 s.仿真时问设为0-0
12s。
圈8是0 12s时电机在空载和堵转状态下的磁力
4模型仿真与结果分析
本文仿真采用的是Y90L一4异步电动机.其基本 参数如表l所示。
自2日剿kw
g黜EⅨ,v #2m*“
l
5
《f*a #f*# &月,f#mm
M 22
l o
3∞
3 7
《≈K&抽m
≮g自&ymml∞O 25 Nhomakorabea《—酗mm
Ⅲ& *《
B
∞
5
———塑!L———』__——重型堕堂L——坠
☆#4
酮
图7异步电动机在堵转情况下的实、虞部磁力线分布
a
foundation for the fault diagnosis and optimal design of induction motor.
Key words:Asynchronous motor;field—circuit coupled;electromagnetic field;ANSYS
disadvantages
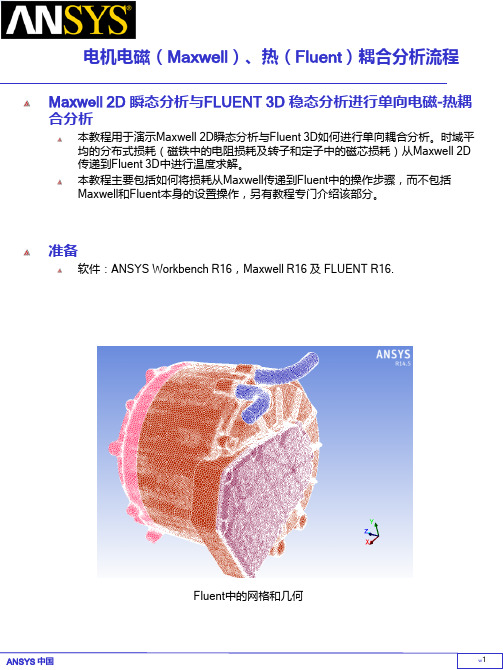
Ansys电机电磁(Maxwell)、热(Fluent)耦合分析流程演示文稿

• 启动Maxwell
• 导入Maxwell文件后会形成一个Maxwell分析系统 • 启动Maxwell
• 双击Maxwell分析系统中的solution
ANSYell)、热(Fluent)耦合分析流程
• 更新Maxwell项目
•右键点击solution •选择Update
Stator
Shaft
ANSYS 中国
Magnets
Rotor
w2
电机电磁(Maxwell)、热(Fluent)耦合分析流程
• Fluent项目
•The Maxwell project contains a 3D mesh model of a ITRI motor •The setup of this motor has already been partially done •注意:考虑到设置效率,建议对Fluent的设置在Workbench外完成,特别是当网格是 四面体,并希望在FLUENT中转化为多面体网格时。在Workbench下Fluent的所有操作 都会被记录,并在重新打开时重新运行所有操作,非常费时。所以建议在Workbench 外将Fluent设置好,这样在Workbench内打开时较为节省时间。
• 由于此处采用现有的Maxwell项目,所以只需要在Workbench中导入即可。用户也 可以新建一个项目,并进行重新设置。
• 导入Maxwell文件 • 菜单栏 File > Import • 更改文件类型为Maxwell Project File (*.mxwl) • 通过导航确定输入文件的位置 • 选择文件“modified.mxwl” • Open打开
• 该教程已经提供了一个完整的CFD案例,并且已经设置好,此处只需要导入,并 设置损耗的映射即可。
基于ANSYS平台的电机NVH仿真分析流程
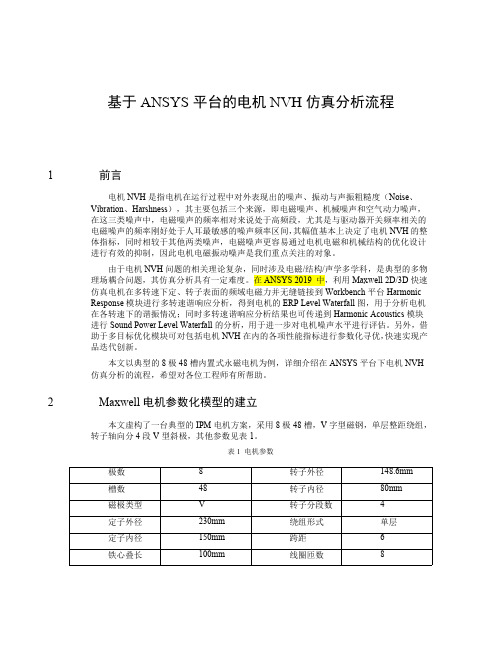
基于ANSYS平台的电机NVH仿真分析流程1前言电机NVH是指电机在运行过程中对外表现出的噪声、振动与声振粗糙度(Noise、Vibration、Harshness),其主要包括三个来源,即电磁噪声、机械噪声和空气动力噪声,在这三类噪声中,电磁噪声的频率相对来说处于高频段,尤其是与驱动器开关频率相关的电磁噪声的频率刚好处于人耳最敏感的噪声频率区间,其幅值基本上决定了电机NVH的整体指标,同时相较于其他两类噪声,电磁噪声更容易通过电机电磁和机械结构的优化设计进行有效的抑制,因此电机电磁振动噪声是我们重点关注的对象。
由于电机NVH问题的相关理论复杂,同时涉及电磁/结构/声学多学科,是典型的多物理场耦合问题,其仿真分析具有一定难度。
在ANSYS2019中,利用Maxwell2D/3D快速仿真电机在多转速下定、转子表面的频域电磁力并无缝链接到Workbench平台HarmonicResponse模块进行多转速谐响应分析,得到电机的ERP Level Waterfall图,用于分析电机在各转速下的谐振情况;同时多转速谐响应分析结果也可传递到Harmonic Acoustics模块进行Sound Power Level Waterfall的分析,用于进一步对电机噪声水平进行评估。
另外,借助于多目标优化模块可对包括电机NVH在内的各项性能指标进行参数化寻优,快速实现产品迭代创新。
本文以典型的8极48槽内置式永磁电机为例,详细介绍在ANSYS平台下电机NVH 仿真分析的流程,希望对各位工程师有所帮助。
2Maxwell电机参数化模型的建立本文虚构了一台典型的IPM电机方案,采用8极48槽,V字型磁钢,单层整距绕组,转子轴向分4段V型斜极,其他参数见表1。
表1电机参数极数8转子外径148.6mm槽数48转子内径80mm磁极类型V转子分段数4定子外径230mm绕组形式单层定子内径150mm跨距6铁心叠长100mm线圈匝数8Maxwell软件具有多种参数化建模方法,我们推荐采用软件内置UDP(User Defined Primitives)或自定义UDP的方式来建模,Maxwell内置了大量UDP模型,涵盖了各种常规电机的定、转子、绕组、机壳的模型,调用方法为Draw>User Defined Primitive>RMxprt,UDP模型中的所有几何尺寸皆可用变量进行定义以实现参数化。
Ansys电机电磁、震动和噪声分析流程

• 谐响应分析结果查看 • 应力与变形
• 单个齿上的速度曲线(bode图)
• 速度的幅值与相位(实际值)
• 建立 ANSYS Mechanical ACT 噪声分析系统 • 新建 ANSYS Mechanical ACT 分析 • 在 Workbench 的 Analysis System 窗口中,选择Harmonic response。并将 Harmonic response 拖拽到Project Schematic 窗口中的 C3 位置。 • 将分析系统的名字改成 “Acoustic”
• 导入Maxwell电磁力 • 在Harmonic response 左侧的Project栏里面,左键点击Import Remote Loads (M axwell2DSolutions), • 在属性窗口中, 1. 将 scooping method 改成 Named Selection 2. 将下一行的 Named Selection 改成预先定义的ToothTips
• 确保 ANSYS Mechanical ACT 已经成功激活 • 确保 ANSYS Mechanical ACT 已经成功激活。 • 如果成功激活, Harmonic response 的工具栏中会出现一行用于噪声计算的 工具
• 定义噪声源传递文件 • 在左侧的Project栏中,右键点击Harmonic response (B5)> Insert > One Way Coupling Analysis (ASI File) • 在下方的Details of One Way Coupling Analysis (ASI File) 属性窗口中 , 1. 将 scooping method 改成 Named Selection 2. 将下一行的 Named Selection 改成预先定义的Stator
基于ANSYS的潜油电机电磁场计算
基于ANSYS的潜油电机电磁场计算范广玲;李春生;高云伟【摘要】异步电机的电磁场计算是属于比较复杂的研究对象之一,而潜油电机因其特殊的结构和用途又是异步电机中的比较特殊的情况。
针对某典型潜油电机的电磁场,应用ANSYS有限元软件建立有限元模型,通过数值计算得到了該潜油电机的电磁场的磁场分布、磁力线分布、磁密分布,同时计算出了定子轭部磁密和齿部磁密。
经数据分析表明,该潜油电机定子采用闭口18槽,转子采用16槽的配合是比较合理的。
%Electromagnetic field induction motors are one of the more complex objects of study,because of their special structure and purpose of the induction motor,and submersible motors is rather special situation.In view of some typical submersible motor of the electromagnetic field,the application of ANSYS software,a finite element model are calculated by numerical the submersible motor of the electromagnetic field of magnetic field distribution and magnetic line of force distribution,flux density distribution and calculated the yoke of the stator flux density and tooth department flux density.After data analyses indicate that the submersible motor stator using silent 18 slots,rotor adopted 16 slot cooperating is more reasonable.【期刊名称】《电子设计工程》【年(卷),期】2012(020)014【总页数】4页(P91-93,97)【关键词】潜油电机;电磁场;有限元法;ANSYS【作者】范广玲;李春生;高云伟【作者单位】东北石油大学,黑龙江大庆163318;东北石油大学,黑龙江大庆163318;大庆油田供水公司,黑龙江大庆163453【正文语种】中文【中图分类】TE358;O24在电磁场有限元法的应用中,异步电机的电磁场计算是属于比较复杂的研究对象之一,而潜油电机因其特殊的结构和用途又是异步电机中的比较特殊的情况。
ansys电磁场仿真分析教程
• 设置预选过滤掉其它应用的菜单 Main menu>preferences
• 选择OK
1-11
• 定义所有物理区的单元类型为 PLANE53 Preprocessor>Element type>Add/Edit/Delete
• 选择 Add • 选择磁矢量和8节点53号单元 • 选择 OK
• 对称面 (B-B)边界条件 – 2D磁矢量势(MVP)方式,无须处理 – 加载电流与全模型相同
B
B
Quarter symmetry model of
the simple magnetizer
1-43
• 1/4模型与全模型比较 – 磁通密度分布相同 – 贮能为1/4 – 所示线圈上的Lorentz力 1/2 – 作用在极面上力为1/2
有限元网格
1-6
• 进行模拟 • 观察结果
– 某指定时刻 – 整个时间历程 • 后处理 – 磁力线 –力 – 力矩 – 损耗 – MMF(磁动势) – 电感 – 特定需要
1-7
• 模拟由3个区域组成 • 衔铁区: 导磁材料 导磁率为常数(
即线性材料)
• 线圈区: 线圈可视为均匀材料. • 空气区:自由空间 (μr = 1) .
• 为每个物理区定义材料 – 导磁率(常数或非线性) – 电阻率 – 矫顽磁力,剩余磁感应
衔铁 线圈 锭子
实体模型
1-5
• 建实体模型 • 给模型赋予属性以模拟物理区 • 赋予边界条件
– 线圈激励 – 外部边界 – 开放边界 • 实体模型划分网格 • 加补充约束条件(如果有必要) – 周期性边界条件 – 连接不同网格
• 选择 OK
1-37
第二章 第2节
ANSYS教程:ANSYS电磁场分析
ANSYS教程:ANSYS电磁场分析静态磁场分析:用于分析不随时间变化的磁场,主要包括三类情况:用磁场的磁场,稳恒电流产生的磁场,匀速运动的导体所产生的磁场。
对于三位静态磁场分析,ansys程序采用了两种方法:标量势法(scalar method)和单元边法(edge-based-method),其中标量势法根据其标量势方程的不同又可分为三种不同的标量势分析方法:简化标量势法(RSP)、微分标量势法(DSP)和广义标量势法(GSP)。
使用单元边法时,电流源是作为整个系统的一部分一起进行网格划分的,由此使用该方法不仅能计算常规物流量(如磁场、磁动势等),还能计算诸如焦耳热损、洛伦兹力等。
根据以下原则选择不同的分析方法:当所分析的问题中不含铁芯区域或虽含铁芯区域但不含电流源时,采用RSP法,在含有铁芯和电流源的模型分析中通常不使用RSP 法。
对于“单连通”铁芯区域模型,使用DSP法,对于“多连通”铁芯区域模型,使用GSP法。
单连通区域指的是带有空气隙的磁路不封闭的铁芯系统,没有空气隙的则为磁路封闭多连通铁芯区域系统。
对于非连续介质模型一般采用单元边法进行求解。
提示:单元边法中使用的单元的节点自由度矢量磁势是沿单元边切向积分的结果,其求解精度高于标量势法的求解精度。
单元边法不仅适用于三维静态磁场分析中,也适用于三维谐性和瞬态磁场分析中。
1 电磁场分析中的默认单位制为MKS单位制,即米、安培和秒。
可以定义其他的单位制:main menu/preprocessor/material props/electromag units2 电磁场分析中大多材料的磁性能可以从ansys程序的材料库中读入,用于也可以自己定义材料性能,方法如下:2.1 定义路径main menu/preprocessor/material props/material library/library path2.2 读入材料参数main menu/preprocessor/material props/material library/import librarymain menu/preprocessor/loads/load step opts/change mat props2.3 修正材料参数main menu/preprocessor/material props/material library/export library2.4 定义材料B-H曲线main menu/preprocessor/material props/material models/electomagnetics/BH curve2.5 在模型上施加电流密度载荷main menu/preprocessor/loads/define loads/apply/magnetic/excitation/current density/on elements2.6 施加电压载荷main menu/preprocessor/loads/define loads/apply/magnetic/excitation/volt drop/on elements2.7 进行求解main menu/solution/solve/electromagnet/static analysis/opt&solv2.8 退出求解器main menu/finish谐性磁场分析:用于分析激励源按正弦或余弦规律变化的磁场问题,如变压器、感应式电机,感应加热炉等电磁装置引发的磁场均属于谐性磁场问题。
基于ANSYS的异步电动机电磁场分析

( c ol f c a ia E g e r ga dA tm t n F z o nv r t, uin3 0 0 , hn ) S h o o h ncl n i e n n u a o , u h uU ie i F j 5 1 8 C ia Me n i o i sy a
te idu to tr o gn h p nd c r a u ai n,h n u t n moo s a ay e y u ig h r ni i ain h n cin moo s c g i g s a e a oe s t r t o t e id c i trwa n lz d b sn a mo c smult o o
优化 设计 奠定基 础 。
关 键词 : 步 电动机 ; 异 场路耦合 ; 电磁 场 ; N Y A SS
中图分类号 : M 4 T 33 文献标 识码 : B
An l ss o h e t o a n tc Fil f a y c o us M o o s d o a y i ft e Elc r m g e i e d o n As n hr no t r Ba e n ANSYS WA h i a C N D — e NG S u— HE ew i f
异步电机电磁场分析ANSYS命令流

ss_w=20/1000 !定子槽宽
ss_h1=2.5/1000 !定子槽口高
ss_w1=20/1000 !定子槽口宽
!转子主要尺寸
outer_rotor=960/1000 !转子铁心外径
inner_rotor=500/1000 !转子铁心内径
nslot_rotor=58 !转子槽数
sr_h=51.5/1000 !转子槽高
cmsel,a,slot_rotor
cm,rotor,area
agen,2,all
cmsel,u,rotor
cm,temp,area
wpave,0
pcirc,inner_rotor/2,outer_rotor/2+airgap/2
cmsel,u,temp
cm,air2,area
sr_w1=16/1000 !转子槽宽(上)
sr_w2=16/1000 !转子槽宽(下)
sr_hh1=1.5/1000 !转子槽口高
sr_ww1=4.5/1000 !转子槽口宽
cmsel,s,winding1
asel,r,loc,x,inner_stator/2,inner_stator/2+ss_h/2
cm,winding1_up,area !定子上层线圈winding1_up完成
cmsel,s,winding1
cm,slot_rotor,area !转子梯形槽slot_rotor完成
lsel,r,loc,x,outer_rotor/2-sr_h
asll,r
cm,winding2,area !转子导条winding2
异步电动机电磁计算程序

20、绕组形式:单层、交叉式
21、并联支路对数:a1=1
22、节距:y1 (1~9、2 ~10、11 ~18)(槽)
23、每槽导体数:Ns1=29
24、导体并绕根数、线径:Nc1dc1=2×Φ1.30 (mm)
25、每根导体截面积:Ac1=π(dc1/2)2 ×10-2 (cm2)
26、槽有效面积:Ae=As-Ai (cm2)
67、定子相电阻:
R1
1 N 1le1
a1Nc1 Ac1
(Ω)
ρ1=0.0217×10-4 Ω·cm (B级绝缘)
标幺值: R1 R1Ikw U NΦ
68、转子导条电阻: RB
K
K B BlB
AB
(Ω)
KB=1.04 (铸铝转子)
ρB =0.0434×10-4 Ω·cm——铸铝材料电阻率(B级) lB ——转子导条长度 (cm) (lB=lt ) AB ——转子导条截面积 (cm2) (转子槽面积) 标幺值: RB RBIkw U NΦ
69、转子端环电阻: RR
K
BZ2 DR 2 p2 AR
(Ω)
DR =D2-hR——转子端环平均直径 (cm) AR=(hR-0.1)×bR ——转子端环截面积 (cm2)
bR=1.0 ——转子端环厚度(cm) 标幺值: RR RR Ikw U NΦ 70、转子电阻标幺值: R2 RB RR
71、漏抗系数:
rR=0.24 (cm) bR3= bR4= hR0=0.05 (cm) hR1=0.1 (cm) hR2=2.5 (cm) hR3=
—— ↑ D2
等槽宽
—— ↑ D2
12、极距:
π Di1
2p
13、定子齿距:
Ansys教程电磁场分析

第5页/共19页
B
B
Quarter symmetry model of
the simple magnetizer
• 1/4模型与全模型比较 • 磁通密度分布相同 • 贮能为1/4 • 所示线圈上的Lorentz力 1/2 • 作用在极面上力为1/2
平面: +Z 电流方向出平面
铁板
轴对称: +Z 电流方向进平面
磁流密度矢 量显示
铁环
线圈
两种情况都是施 加正向电流
第12页/共19页
• 磁力线描述 • 平面: AZ等值线 • 轴对称: r AZ 等值线
平面或 轴 对称 ?
电枢
线圈
定子
第13页/共19页
平面或 轴 对称 ?
• 力、能量、电感的描述 • 平面: 单位长度 • 轴对称: 整个圆周上的值
• 沿A-A必须加约束
A
(1/2)对称模型
第3页/共19页
• 半对称模型与全模型比较: • 磁通量密度是相同的 • 线圈上Lorentz 力是相同的 • 贮能为 1/2 • 极面上力为 1/2 • 加载电流密度与全模型相同
简单导磁体的半对称模型
第4页/共19页
线圈 (象征性的)
• 沿B-B磁通量垂直边条件需满足 • B-B线上下两边如下参数是相同的 • 几何形状 • 材料性质 • B-B线上下两边励磁相同
• 轴对称 • 平面 • 点取单元选项
第10页/共19页
• 选择 OK
用于定义平面属性的参考号 用于直流模拟
几何体型 式
因为plane13 用于耦合场模拟,故该 单元可以具有应力/应变结构选项
ANSYS CFD 电机温度场仿真分析流程
ANSYS CFD电机温度场仿真分析流程1前言电机是一种实现机电能量转换的电磁装置。
从19世纪末期起,电机就逐渐代替蒸汽机作为拖动生产机械的原动机。
电机在运行时将产生各种损耗,这些损耗转变成热量,使电机各部件发热,温度升高。
电机中的某些部件,特别是电机的绝缘,只能在一定的温度限值内才能可靠工作。
为维持电机的合理寿命,需要采取适当的措施将电机中的热量散发出去,使其在允许的温度限值内运行。
电机冷却的目的就是根据不同类型的电机选择一种合理的冷却方式,保证在额定运行状态下,电机各部分温度不超过国家标准允许的限值。
电机的冷却方式,主要是指对电机散热采用什么冷却介质和相应的流动途径。
改进电机的冷却技术,对提高电机的利用系数和效率及增加可靠性和寿命,特别对提高大型电机的单机容量,都具有重要的意义。
为了找到最佳的电机冷却方式,需要对电机在工作过程中的核心流动问题进行CFD仿真分析。
电机的CFD仿真分析的核心问题即是电机散热系统分析,涉及通风系统、通风部件、换热部件的设计优化问题以及电机核心部件的温升(起动时及额定工况)等问题。
2技术路线电机的稳态温度场仿真的分析流程如下图所示。
3实施过程以一个基于FLUENT的异步电机的稳态温度场分析为例进行说明。
3.1几何处理电机的温度场仿真既涉及到空气的流动,也涉及到热量在绕组和其他结构件之间的传递,属于流-固共轭换热的范畴,因此仿真计算域中既包含流体域,也包含固体域。
由于流体域和固体域两者是互补的关系,所以在抽取流体域之前,需要先对固体域做处理。
电机模型较为复杂,细节特征较多,而流场仿真分析对网格质量的要求较高,因此在保证计算精度的前提下,需要先对实际电机物理模型做一些合理的简化从而尽可能缩小计算的规模。
简化对象的选取是根据具体结构对温度场计算的影响程度来决定:如果局部的细节特征对温度场计算的影响和主要因素相比可以忽略不计,那么这些细节就可以去除;如果考察的对象是局部的细节特征,则需要建立局部细化模型,从而考虑具体的细节特征。
Ansys电机电磁(Maxwell)、热(Fluent)耦合分析流程图
Shaft
ANSYS 中国
Magnets
Rotor
w2
电机电磁(Maxwell)、热(Fluent)耦合分析流程
Fluent项目
The Maxwell project contains a 3D mesh model of a ITRI motor The setup of this motor has already been partially done 注意:考虑到设置效率,建议对Fluent的设置在Workbench外完成,特别是当网格 是四面体,并希望在FLUENT中转化为多面体网格时。在Workbench下Fluent的所 有操作都会被记录,并在重新打开时重新运行所有操作,非常费时。所以建议在 Workbench外将Fluent设置好,这样在Workbench内打开时较为节省时间。
准备
软件:ANSYS Workbench R16,Maxwell R16 及 FLUENT R16.
Fluent中的网格和几何
ANSYS 中国
w1
电机电磁(Maxwell)、热(Fluent)耦合分析流程
Maxwell项目
The Maxwell project contains a 2D geometry of a ITRI motor The setup of this motor has already been partially done Note I: It is a better way to set up Maxwell outside Workbench. It is more efficient compared with setup inside Workbench Note II: If thermal simulation can not be treated as periodic problems, for the reason of mapping data, Maxwell should use full model to analyze
基于ANSYS三相异步电机实验平台设计

基于ANSYS三相异步电机实验平台设计作者:刘杰吴凡夫梅建伟来源:《科技风》2020年第22期摘要:课题利用ANSYS软件建立了三相异步电机仿真模型,对物理环境、定子/转子等模型建立以及单元属性类别等涉及到三相异步电机建模的几个关键要素进行了详细的阐述,利用matlab建立了异步电机转子磁场定向矢量控制系统模型,分析了ANSYS与matlab的协同仿真技术。
实验结果表明,该实验平台使得抽象的概念更加清晰直观,满足了电机实验系统的要求。
关键词:ANSYS;三相异步电机;建模;仿真传统电机的设计中开发和实验周期长成本高,而现代电机由于磁极形状、齿槽分布等复杂多样,使得磁路十分复杂,使得经典的电机设计及其实验方法已经不能满足需要。
针对电机设计和实验中的核心问题,采用ANSYS软件建立异步电机定子/转子等模型,与其他软件协同仿真,准确地计算出电机的磁场分布、电感、力矩等,分析电机的散热、机械特性以及电磁性能[1]。
1 ANSYS三相异步电机实验平台ANSYS电机及控制系统集成化设计方案可解决电机本体及控制系统的快速设计、方案优选和电机精确电磁性能分析等问题。
用户还可根据需要,补充结构、噪声分析等软件,即可实现单向或双向的电机多物理域协同设计、高精度电机及控制系统集成化设计等[2]。
三相异步电机实验系统包括:异步电机本体和控制系统建模、协同仿真技术以及实验结果分析和处理。
基于ANSYS的异步电机建模的实质是在计算机中运行电机,主要分为前处理(建模)、网格划分、加载设置求解以及后处理。
建模可以使用GUI控制流或者命令流,首先建立异步电机的各单元,比如定子铁心、定子绕组、转子等,再对每一部分进行划分网格和单元类型定义,保证电机建模的完整性。
2 异步电机建模步骤2.1 物理環境的创建物理环境的创建主要包括定义工作标题、定义文件工作名、定义分析类型、进入前处理、异步电机定子和转子基本参数设置、参数和单元类型定义以及组件特性定义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TBPT,, 42500.0000 , 2.30000000
TBPT,, 44500.0000 , 2.32000000
TBPT,, 48200.0000 , 2.35000000
TBPT,, 52200.0000 , 2.37000000
turn1=ss_turn/ss_cln !绕组匝数(注意,要除以并绕根数!)
leng1=ss_cll !绕组轴向长度
fill1=(ss_clw*ss_clh)*ss_turn/care1 !绕组填充系数
!定义单元类型
et,1,plane53,0 !AZ 自由度,用于空气和绝缘区域
et,2,plane53,3 !用于定子线圈导体 AZ,CURR,EMF 自由度
type,3
mat,14
esize,r3/7
amesh,639
amesh,641
amesh,640
amቤተ መጻሕፍቲ ባይዱsh,642
esize,r4/4
amesh,643
!对定子磁轭划分网格
type,3
mat,13
esize,r2/10
amesh,63
!对磁铁划分网格
type,3
mat,4
mp,rsvx,2,0.0434e-6 !导体电阻率
mp,murx,3,1 !导体导磁率,用于转子导条
mp,rsvx,3,0.0434e-6 !导体电阻率
HC=1000000 !永磁体矫顽力
TB,BH,4,,30 !永磁体 BH 曲线
TBPT,, 130.000000 , 0.10000000
TBPT,, 56000.0000 , 2.39000000
TBPT,, 60000.0000 , 2.41000000
mp,mgxx,4,0
mp,mgyy,4,hc
!定义其他 7 块永磁体用同样地方法
TB,BH,5,,30
mp,mgxx,5,0
mp,mgyy,5,-hc
TB,BH,6,,30
ss_w=1.7/1000 !槽宽
ss_ci=0.2/1000 !绕组层间绝缘厚度
ss_turn=48/2 !定子每个绕组导线根数
ss_cln=2 !并绕导线根数
ss_clw=0.56/1000 !导线宽度
ss_clh=0.2/1000 !导线高度
ss_cli=0.05/1000 !导线间漆膜厚度
cyl4,,,r2,,r1
xo=sqrt(r2**2-(ss_w/2)**2)
wpave,xo
blc4,,-ss_w/2,ss_h,ss_w
blc4,ss_h-ss_ci,ss_w/2,-ss_ch,-ss_w
blc4,ss_h-ss_ch-ss_ci*2,ss_w/2,-ss_ch,-ss_w
TB,BH,10,,30
mp,mgxx,10,-0.707*hc
mp,mgyy,10,-0.707*hc
TB,BH,11,,30
mp,mgxx,11,-0.707*hc
mp,mgyy,11,0.707*hc
mp,murx,12,1 ! 隔磁材料磁导率
mp,murx,13,5000 ! 定子铁心磁导率(硅钢片)
! 基于场路耦合时空有限元的永磁电机瞬态特性研究.kdh
/uis,msgpop,3
/prep7
csys,0
btol,1e-10 !指定布尔运算公差
*afun,deg !指定输入输出为参数的单位为角度
r1=47.5/1000 !定子外半径,转化为国际单位制
r2=26/1000 !定子内半径,转化为国际单位制
et,3,plane53,0 !AZ 自由度,用于铁芯区域和磁铁部分
et,4,53,0 !AZ 自由度,用于铁芯区域
r,2,care1,turn1,leng1,,fill1 !定子线圈单元的实常数
!定义材料参数
mp,murx,1,1 !空气导磁率,用于空气和绝缘
mp,murx,2,1 !导体导磁率,用于定子线圈
adele,all,,,1
asel,s,loc,x,r2,r2+ss_h
lsla
lsel,r,loc,x,r2-delta,r2+delta
lcomb,all
lsel,s,loc,x,r1-delta,r1+delta
asll
lsla
lsel,r,loc,x,r2-delta,r2+delta
TBPT,, 810.000000 , 1.20000000
TBPT,, 975.000000 , 1.30000000
TBPT,, 1600.00000 , 1.40000000
TBPT,, 2520.00000 , 1.50000000
TBPT,, 3520.00000 , 1.60000000
! 建立转子几何模型
csys,0
wpave,0
*get,maxarea1,area,,num,max
numstr,area,maxarea1
cyl4, , ,r3
cyl4, , ,r4
asba,maxarea1+1,maxarea1+2
*get,maxarea2,area,,num,max
*get,maxarea3,area,,num,max
numstr,area,maxarea3
wpro,-45,,
*do,i,0,3
wpro,-90*i
blc4,-sr_ch/2,r3-sr_cct,sr_ch,sr_cct*2
*enddo
wpcsys,-1,0
cyl4, , ,r3
asll
cm,aa3,area
cmsel,a,aa2
allsel,below,area
asba,aa3,aa2
cm,aa3,area
cmsel,s,aa1
agen,nslots,all,,,,360/nslots
cmsel,a,aa3
allsel,below,area
nummrg,kp
csys,1
lsel,s,loc,x,r3-r3/1000,r2+r2/1000
lesize,all,gap/2,,,,,,,1
mshape,1,2d
mshkey,0
amesh,644
!对转轴划分网格
type,3
mat,12
esize,r4/4
amesh,638
!对转子磁轭划分网格
mp,mgxx,6,hc
mp,mgyy,6,0
TB,BH,7,,30
mp,mgxx,7,-hc
mp,mgyy,7,0
TB,BH,8,,30
mp,mgxx,8,0.707*hc
mp,mgyy,8,0.707*hc
TB,BH,9,,30
mp,mgxx,9,0.707*hc
mp,mgyy,9,-0.707*hc
ss_cll=60/1000 !绕组长度(定子铁芯长度)
ss_ch=(ss_clh+ss_cli)*(ss_turn/ss_cln)!每个绕组高度
ss_cw=(ss_clw+ss_cli)*ss_cln !每个绕组宽度
!定义转子永磁体磁体尺寸参数
sr_ch=3 !永磁体厚度(下相同)
sr_cco=16 !永磁体 1 宽度
blc4,ss_h,ss_cw/2,-(ss_ch*2+ss_ci*2),-ss_cw
asel,s,loc,x,r2,r2+ss_h
csys,1
lsel,s,loc,x,r1-delta,r1+delta
asll,a
lsel,all
aovlap,all
asel,s,loc,x,xo,r2
esize,sr_ch/4
amesh,626
mat,5
esize,sr_ch/4
TBPT,, 4760.00000 , 1.70000000
TBPT,, 8300.00000 , 1.80000000
TBPT,, 12000.0000 , 1.90000000
TBPT,, 17000.0000 , 2.00000000
TBPT,, 23000.0000 , 2.10000000
cm,a_si,area !定子槽中的绝缘和空气
rmax=r2+ss_h-ss_ci
rmin=rmax-ss_ci-2*ss_ch
asel,s,loc,x,rmin,rmax
cmsel,u,a_si
cm,a_sc,area !定子槽中的导体
allsel
!对气隙划分网格
type,1
mat,1
a,706,707,719,721,729,730
a,711,713,708,705,745,746
aovlap,all
!压缩关键点、线、面
allsel
nummrg,kp
numcmp,kp
numcmp,line
numcmp,area
!将定子绕组生成组件
csys,1
asel,s,loc,x,r3+delta,r2-delta
lcomb,all
allsel