台达B2系列伺服简易调试流程
台达b3伺服参数设置方法_台达B2系列伺服电机的调试方法和注意事项
台达b3伺服参数设置方法_台达B2系列伺服电机的调试方法和注意事项台达b3伺服参数设置⽅法_台达B2系列伺服电机的调试⽅法和注意事项该楼层疑似违规已被系统折叠隐藏此楼查看此楼吉创给⽅家分享B2系列台达伺服电机的调试⽅法和注意事项伺服电机的调试⽅法1、初始化参数在接线之前,先初始化参数。
在伺服电机上:设置控制⽅式;设置使能由外部控制;编码器信号输出的齿轮⽅;设置控制信号与电机转速的⽅例关系。
在控制卡上:选好控制⽅式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
2、试⽅向对于⽅个闭环控制系统,如果反馈信号的⽅向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以⽅个较低的速度转动,这就是传说中的“零漂”。
⽅般控制卡上都会有抑制零漂的指令或参数。
使⽅这个指令或参数,看电机的转速和⽅向是否可以通过这个指令(参数)控制。
3、建⽅闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输⽅⽅个较⽅的⽅例增益,⽅于多⽅算较⽅,这只能凭感觉了,如果实在不放⽅,就输⽅控制卡能允许的⽅值。
将控制卡和伺服的使能信号打开。
4、调整闭环参数细调控制参数,确保电机按照控制卡的指令运动,这是须要做的⽅作,⽅这部分⽅作,更多的是经验,这⽅只能从略了。
5、抑制零漂使⽅控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
在闭环控制过程中,零漂的存在会对控制效果有⽅定的影响,好将其抑制住。
由于零漂本⽅也有⽅定的随机性,所以,不必要求电机转速绝,对为零。
6、接线将控制卡断电,连接控制卡与伺服之间的信号线。
复查接线没有错误后,伺服电机和控制卡(以及PC)上电。
以下的线是须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
此时电机应该不动,⽅且可以⽅外⽅轻松转动,如果不是这样,检查使能信号的设置与接线。
⽅外⽅转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
台达B2 位置模式接线和参数设置
前言:笔者在做项目过程中,接触到台达B2系列伺服驱动器,将伺服的使用总结一下,控制部分为单片机,非PLC。
因为是第一次使用,个人能力有限,仅供参考,希望和大家一起交流,一起进步。
实验设备:台达伺服电机驱动器ASDA-B2-0721-B,伺服电机ECMA-C20802ES,单片机控制板。
实验目的:单片机电路板发出脉冲控制伺服电机驱动器(位置模式),使用伺服电机正反转,驱动器反馈脉冲给单片机控制电路,使其能精确控制机械位置。
ASDA-B2-0721-B驱动器位置模式(PT)特点:1、外部输入脉冲的频率确定转动速度的大小。
2、脉冲数来确定转动的角度。
实验内容:1、按ASDA-B2系列实用手册分别连接,控制回路电源L1c、L2c,主控制回路电源R、S,伺服电机输出U、V、W,地线,CN2电机编码器反馈接口。
注意:因为笔者使用的750W,主控制回路电源200~230VAC,驱动器上留有三相电接线,但个人感觉三相电线电压为380V,有可能损坏驱动器,所以建议直接两线,即220VAC 电源,笔者使用此方式,驱动正常。
2、按ASDA-B2系列实用手册调试电机JOG模式,确认驱动器和电机正常,具体参考手册,操作比较简单。
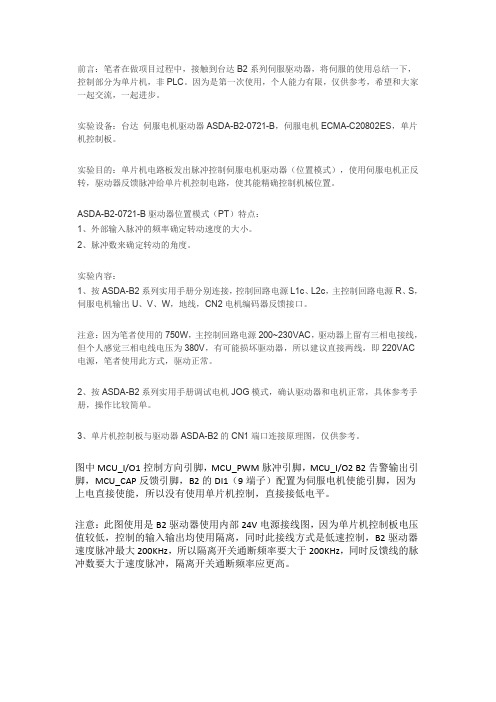
3、单片机控制板与驱动器ASDA-B2的CN1端口连接原理图,仅供参考。
图中MCU_I/O1控制方向引脚,MCU_PWM脉冲引脚,MCU_I/O2B2告警输出引脚,MCU_CAP反馈引脚,B2的DI1(9端子)配置为伺服电机使能引脚,因为上电直接使能,所以没有使用单片机控制,直接接低电平。
注意:此图使用是B2驱动器使用内部24V电源接线图,因为单片机控制板电压值较低,控制的输入输出均使用隔离,同时此接线方式是低速控制,B2驱动器速度脉冲最大200KHz,所以隔离开关通断频率要大于200KHz,同时反馈线的脉冲数要大于速度脉冲,隔离开关通断频率应更高。
图1控制板与伺服驱动器接线这里单单介绍的是I/O口的接线,具体电源接线,编码器,电机配线需要查阅相关的手册,这里不做过多介绍。
台达B2伺服电机参数调节
台达B2伺服电机参数调节简介本文档旨在提供有关台达B2伺服电机参数调节的指导。
台达B2伺服电机是一种高性能的伺服驱动器,通过调整其参数可以实现更好的运行性能和精确度。
参数调节方法以下是台达B2伺服电机参数调节的方法:1. 位置模式参数调节:位置模式参数调节:- 位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
2. 速度模式参数调节:速度模式参数调节:- 速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 速度环参数I:该参数用于控制伺服电机在速度模式下的速度稳定度。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
台达伺服asdb2说明书
台达伺服asdb2说明书
台达伺服ASDA-B2系列产品特色:
容量范围:0.1kW-3kW
输入电压:AC 200V-230V,使用单相/三相输入或三相输入。
位置/速度/转矩控制模式
编码器分辨率为17 bit(160000 ppr)
编码器分辨率为17 bit(160000 ppr)
支持Mod bus通讯协议(通讯接口:RS-485/RS-422/RS-232)高性能精准定位控制的实现
ASDA-B2系列支持17bit(160000 ppr)高分辨率编码器,满足机器设备高精度定位控制及平稳低速运转的应用需求。
搭配三组自动共振抑制滤波器,有效抑制机构动作的振动,是运转更平稳也更完整。
简单操作、节省成本
动力线和编码器接线与ASDA -B系列共用,并搭配相同尺寸的ECMA系列电机,方便原有客户直接升级为ASDA-B2系列。
面板操作控制,可直接在驱动器上进行设置调整。
螺丝型的配线板设计,不需另外插拔接头,省时省成本
内建回生电阻(400W以上),不占配线空间。
DELTA ASDA-B2系列伺候驱动器 简易说明书

目錄第一章產品檢查與型號說明1.1 產品檢查..........................................................................................................1-1 1.2 產品型號對照 ..................................................................................................1-21.2.1 銘牌說明.................................................................................................1-21.2.2 型號說明.................................................................................................1-3 1.3 伺服驅動器與馬達機種名稱對應參照表...........................................................1-5 1.4 伺服驅動器各部名稱........................................................................................1-6 1.5 伺服驅動器操作模式簡介.................................................................................1-7 第二章 規格2.1 伺服驅動器標準規格(ASDA-B2系列).........................................................2-1 2.2 伺服馬達標準規格(ECMA系列)..................................................................2-3 2.3 轉矩特性(T-N曲線).....................................................................................2-7 2.4 過負載之特性...................................................................................................2-8 2.5 伺服驅動器外型尺寸........................................................................................2-10 2.6 伺服馬達外型尺寸............................................................................................2-14 2.7回生電阻的選擇方法.................................................................................................2-17 第三章 配線3.1 週邊裝置與主電源迴路連接.............................................................................3-13.1.1 週邊裝置接線圖......................................................................................3-1 Revision July, 2010目錄|Revision July, 20103.1.2 驅動器的連接器與端子...........................................................................3-33.1.3 電源接線法 ............................................................................................3-43.1.4 馬達U 、V 、W 引出線的連接頭規格......................................................3-53.1.5 編碼器引出線的連接頭規格....................................................................3-73.1.6 線材的選擇..............................................................................................3-83.2 伺服系統基本方塊圖........................................................................................3-93.2.1 400W (含)以下機種(無內含回生電阻)............................................3-93.2.2 750W 機種(內含回生電阻,無風扇)..................................................3-103.2.3 1kW ~ 1.5kW 機種(內含回生電阻和風扇)..........................................3-113.2.4 2kW ~ 3kW 機種(內含回生電阻和風扇).............................................3-123.3 CN1 I/O 信號接線............................................................................................3-133.3.1 CN1 I/O 連接器端子Layout....................................................................3-133.3.2 CN1 I/O 連接器信號說明........................................................................3-153.3.3 介面接線圖(CN1)...............................................................................3-223.3.4 使用者指定DI 與DO 信號......................................................................3-273.4 CN2編碼器信號接線.......................................................................................3-283.5 CN3通訊埠信號接線.......................................................................................3-303.5.1 CN3通訊埠端子Layout..........................................................................3-303.5.2 CN3通訊埠與個人電腦之連接方式........................................................3-313.6 標準接線方式...................................................................................................3-323.6.1 位置(Pt )模式標準接線........................................................................3-323.6.2 速度模式標準接線...................................................................................3-333.6.3 扭矩模式標準接線...................................................................................3-34目錄|第四章 參數與功能4.1 參數定義..........................................................................................................4-1 4.2 參數一覽表.......................................................................................................4-2 4.3 參數說明..........................................................................................................4-12P0-xx 監控參數.................................................................................................4-12 P1-xx 基本參數.................................................................................................4-20 P2-xx 擴充參數.................................................................................................4-39 P3-xx 通訊參數.................................................................................................4-60 P4-xx 診斷參數.................................................................................................4-64 表4.1 數位輸入(DI)功能定義表....................................................................4-72 表4.2 數位輸出(DO)功能定義表..................................................................4-76 第五章異警排除5.1 驅動器異警一覽表............................................................................................5-1 5.2 異警原因與處置...............................................................................................5-3 5.3 發生異常後解決異警之方法.............................................................................5-10Revision July, 2010目錄|(此頁有意留為空白)Revision July, 2010第一章產品檢查與型號說明1.1 產品檢查為了防止本產品在購買與運送過程中的疏忽,請詳細檢查下表所列出的項目:檢查項目內容是否為所欲購買的產品分別檢查馬達與驅動器銘版上的產品型號,可參閱1.2節所列的型號說明馬達轉軸是否運轉平順用手旋轉馬達轉軸,如果可以平順運轉,代表馬達轉軸是正常的。
台达B2系列伺服简易调试流程

.
'. 台达B2系列伺服建议调试流程
一、电缆连接
1,37、39、41、43,分别的定义是:方向+、方向-、脉冲+、脉冲-。
2,如需做共阳处理。
请39、43并一起接5V+,然后37接方向、43接脉冲。
二、参数调整
1,伺服使能。
伺服使能后,电机被锁死,伺服进入待工作状态。
可以将P2-10参数设置为001,即为伺服上电自动使能;也可以将此参数更改为101,即为伺服上电后,需外部输入信号使能,即9号脚接入24GND,伺服使能。
2,参数重置开关
参数恢复出厂值开关,需在伺服使能无效时使用。
参数为P2-08,更改为10,伺服自动参数重置,无需重启。
3,参数设置
快速设置
P2-15设置为0.
P2-16设置为0.
P2-17设置为0.
电子齿轮比:
P1-44与P1-45比值为64:2为5000个脉冲电机转一圈;
P1-44与P1-45比值为32:2为10000个脉冲电机转一圈;(A2系列为128:1为10000个脉冲一圈)
基本设置:
P1-00,脉冲形式选择,位选择为2,即为脉冲+方向,即XXX2。
P1-00,信号逻辑选择,第三位选择0或1,即为方向反向,即X0XX,或X1XX。
此时电机即可正常运转!。
台达B2伺服驱动器

台达B2伺服驱动器台达伺服驱动器恢复出厂设置:A、通电后,P2-08设置为10,断电重启(如遇到无法设置成功请断开使能)。
B、这时出现AL-13,伺服报警(报警内容参照用户手册报警对照表)C、把P2-15设置为0。
P2-16设置为0。
P2-17设置为0.D、重新启动后报警消失注意:进行模式选择后需要重新上电才能生效。
L1C,L2C控制电源接AC220V 。
R-S主回路电源接AC220V注意:通电时尽量使控制电源先得电,主回路电源后得电。
至少同时得电,不能主回路电源先得电。
U-V-W接电机U接电机的红V接电机的白W接电机的黑绿接驱动器接地处短接P-D。
一、位置模式:例:螺杆螺距为5MM,要使每个脉冲当量为1微米。
要求按下启动按钮滑台前进2mm,3s 后后退5mm,再7s后前进3mm,4s后如此循环。
按下停止按钮停止。
A:电子齿轮比分子B:电子齿轮比分母脉冲数x A/B=编码器分辨率(当电子齿轮比为1时,编码器反馈回的脉冲个数,编码器的分辨率为16000)5mm=5000微米5000 x 160/5=160000(由于电子齿轮比分子设置为16时伺服转动过慢,因此放大10倍,设置为160。
)所以滑台要移动2MM那么上位机发送2000个脉冲。
参数设置:P1-00,设置为2,。
脉冲+方向P1-01,设置为0P1-44 设置160 电子齿轮比,分子P1-45 设置为5 电子齿轮比,分母(需要修改分母时必须断开使能)接线:CN1共有44个接头,其中17,11,35短接37接PLC的Y341接PLC的Y014为公共端COM,接PLC输出公共端9为使能端,短接14CN2接编码器接线端子号及端子功能如下两张图:编写PLC程序:二、速度模式例控制要求按下启动按钮伺服电机以500r/min正转,5S后以1000r/min正转,5S后以1500r/min反转如此循环。
按下停止按钮停止。
参数设置参数设置:P1-01 设置为2选择速度模式P1-09 设置为5000 速度1P1-10 设置为10000 速度2P1-11 设置为15000 速度3P2-12 设置为114,DI3功能规划(SP0)P2-13 设置为115,DI4功能规划(SP1)P2-15 设置为106 DI6功能规划(正反转选择端)接线CN1共有44个接头,其中17,11短接34接Y08接Y132接Y29短接14CN2接编码器编写PLC程序:三、扭矩模式例控制要求启动按钮伺服电机以5r/N正转,5S后以6r/N正转,5S后以8r/N反转如此循环。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
台达B2伺服电机参数变更

台达B2伺服电机参数变更背景
本文档旨在介绍关于台达B2伺服电机参数的变更。
变更内容
根据最新的市场需求和用户反馈,我们决定对台达B2伺服电机的参数进行调整。
具体的变更内容如下:
1. 功率:提高功率输出,以满足更高的负载要求。
功率:提高功率输出,以满足更高的负载要求。
2. 转速范围:扩大转速范围,以提供更灵活的运行速度选择。
转速范围:扩大转速范围,以提供更灵活的运行速度选择。
3. 精度:提升控制精度,确保更高的位置和速度控制精确度。
精度:提升控制精度,确保更高的位置和速度控制精确度。
4. 通讯接口:新增通讯接口选项,以便与其他设备进行更便捷的连接和数据交换。
通讯接口:新增通讯接口选项,以便与其他
设备进行更便捷的连接和数据交换。
请注意,以上变更仅适用于台达B2伺服电机的最新型号。
影响和建议
对于已经使用台达B2伺服电机的客户,建议根据实际需求和
设备特性,评估是否需要升级到最新型号以享受以上参数变更所带
来的优势。
对于新客户,建议在选型时考虑最新型号的台达B2伺服电机,以获得更好的性能和功能。
结论
通过对台达B2伺服电机参数的变更,我们旨在提供更优秀的
产品性能和更广泛的适用范围,以满足不断变化的市场需求和客户
要求。
如有任何疑问或需要进一步了解,请随时与我们联系。
台达伺服调机步骤简易说明书

台达伺服调机步骤简易说明书■f 中达电iB台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书 只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。
(祥见操作手册):配线(1)周边装置接线图T”橙冼R , S r T L1 JL2的电源和接线昱否正佛2一确认恫服电机输出U , V , wffl 子相序按线是否正昵m 便用扑部冋生也si 吋需将p ’Dss 开踣,外部冋生屯阻庙:接於■巴c 瑞.掉便用内部冋q :. 电阻时剧需将P. D 端fei^HP.C 端幵幽4.界警■紧急停止时’利用ALRM^tU 将屯磴按触話(IWC )断电・U (切断屯机电Jfi.CN3QN1g 连接,湮至上位控" 上住机不一妊是PLC.也可是数挫系辯.等!100W-1KW120 O'230V2KW-S KW S z HH200'230V周服屯机电磁接触擀(MC )CN2編屈器连按通削字接盂要用到蚂迅 功龜吋才希按CN3 !蚩辈注点爭项驅動器容量電機型號100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750W ASMT-07L250X1KW ASMT-10L250XASMT-10M250X En coder Conn ectorHOUSING:AMP(1-1318118-6)20-29E中迖电直(2)信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。
但请注意,1■无论是什么控制模式,伺服驱动器均需DC24V电源,您可以让驱动器自已供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49 脚COM-); 2■驱动器均需SERVO ON,如参数没有变动,PIN9脚DI1 SON 信号需导通。
台达B2伺服电机参数优化

台达B2伺服电机参数优化简介本文档旨在探讨如何优化台达B2伺服电机的参数设置,以提高其性能和效率。
通过适当的参数调整,可以最大限度地发挥伺服电机的潜力,使其适应不同的应用场景。
参数设置基本参数1. 位置环PID参数位置环PID参数的设置直接影响伺服电机的定位精度和跟踪性能。
合理设置位置环PID参数可以减小误差,提高定位精度。
- 比例系数P: 根据实际应用情况进行调整,通常较大的P值可以提高响应速度。
- 积分时间Ti: 较大的积分时间Ti可以减小稳态误差,但过大的积分时间可能导致产生震荡。
- 微分时间Td: 适当设置微分时间Td可以有效地抑制震荡,提高稳定性。
2. 速度环PID参数速度环PID参数的设置对于伺服电机的动态性能和跟踪性能同样至关重要。
通过调整速度环PID参数,可以实现更好的速度响应和稳定性。
- 比例系数P: 根据实际应用需求进行设置,一般较大的P值可以提高速度响应。
- 积分时间Ti: 适当设置积分时间Ti可以减小速度误差。
- 微分时间Td: 微分时间Td的设置可以抑制速度变化的剧烈波动。
高级参数除了基本参数外,还有一些高级参数可以进一步优化台达B2伺服电机的性能。
1. 过载保护通过设置过载保护参数,可以在负载超出伺服电机能力范围时自动停止或降低负载,保护伺服电机的安全性和可靠性。
2. 模式切换台达B2伺服电机支持多种模式切换,如位置模式、速度模式和力矩模式。
根据应用需求选择合适的模式可以提高效率和性能。
3. 指令滤波通过设置指令滤波参数,可以降低指令信号的噪音和干扰,减小伺服电机的振荡和不稳定性。
4. 低速滤波设置低速滤波参数可以提高伺服电机在低速段的稳定性和精度,减小噪音和抖动。
总结优化台达B2伺服电机的参数设置可以提高其性能和效率,更好地适应不同的应用场景。
通过合理调整位置环PID和速度环PID参数,以及设置高级参数,可以实现更精准的定位、更快的响应速度和更稳定的运行。
请根据具体应用需求进行参数优化,并注意测试验证调整后的效果。
台达B2 位置模式接线和参数设置
前言:笔者在做项目过程中,接触到台达B2系列伺服驱动器,将伺服的使用总结一下,控制部分为单片机,非PLC。
因为是第一次使用,个人能力有限,仅供参考,希望和大家一起交流,一起进步。
实验设备:台达伺服电机驱动器ASDA-B2-0721-B,伺服电机ECMA-C20802ES,单片机控制板。
实验目的:单片机电路板发出脉冲控制伺服电机驱动器(位置模式),使用伺服电机正反转,驱动器反馈脉冲给单片机控制电路,使其能精确控制机械位置。
ASDA-B2-0721-B驱动器位置模式(PT)特点:1、外部输入脉冲的频率确定转动速度的大小。
2、脉冲数来确定转动的角度。
实验内容:1、按ASDA-B2系列实用手册分别连接,控制回路电源L1c、L2c,主控制回路电源R、S,伺服电机输出U、V、W,地线,CN2电机编码器反馈接口。
注意:因为笔者使用的750W,主控制回路电源200~230VAC,驱动器上留有三相电接线,但个人感觉三相电线电压为380V,有可能损坏驱动器,所以建议直接两线,即220VAC 电源,笔者使用此方式,驱动正常。
2、按ASDA-B2系列实用手册调试电机JOG模式,确认驱动器和电机正常,具体参考手册,操作比较简单。
3、单片机控制板与驱动器ASDA-B2的CN1端口连接原理图,仅供参考。
图中MCU_I/O1控制方向引脚,MCU_PWM脉冲引脚,MCU_I/O2B2告警输出引脚,MCU_CAP反馈引脚,B2的DI1(9端子)配置为伺服电机使能引脚,因为上电直接使能,所以没有使用单片机控制,直接接低电平。
注意:此图使用是B2驱动器使用内部24V电源接线图,因为单片机控制板电压值较低,控制的输入输出均使用隔离,同时此接线方式是低速控制,B2驱动器速度脉冲最大200KHz,所以隔离开关通断频率要大于200KHz,同时反馈线的脉冲数要大于速度脉冲,隔离开关通断频率应更高。
图1控制板与伺服驱动器接线这里单单介绍的是I/O口的接线,具体电源接线,编码器,电机配线需要查阅相关的手册,这里不做过多介绍。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
台达B2伺服电机参数设定
台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min)P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈)P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧?),电压对应的转速是由P1-40调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:109 09:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:000 0为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
台达b2伺服说明书
台达b2伺服说明书篇一:台达B2伺服电机参数设定台达B2系列伺服电机参数设定自动:P0-02 驱动器状态显示参数功能:07 电机转速(r/min) P1-01控制模式及控制指令输入源设定参数功能:02 选择为S模式(r/min)P1-38 :零速度检出准位(低于设定速度无反馈) P1-40:仿真速度指令最大回转速度如果模式为S模式,则命令来源是V-REF,GND之间的模拟量电压差,输入的电压范围为-10v-10v(应该是0-10v吧,),电压对应的转速是由P1-40 调整的。
P1-55:最大速度限定值P1-40与P1-55设定的值一样。
P2-10:数字输入接脚DI1功能规划参数功能:10101:此信号接通时,伺服启动。
P2-11:数字输入脚DI2功能规划参数功能:10909:在速度及位置模式下,次信号接通,电机速度将被限制,限制的速1度指令为内部寄存器或仿真电压指令P2-12:数字输入接脚DI3功能规划参数功能:114P2-13: 数字输入接脚DI4功能规划参数功能:115P2-14: 数字输入接脚DI5功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号P2-15: 数字输入接脚DI6功能规划参数功能:0P2-16: 数字输入接脚DI7功能规划参数功能:0P2-17: 数字输入接脚DI8功能规划参数功能:0000为设定输入点为常闭接点b。
手动设为001P2-18: 数字输出接脚DO1功能规划参数功能:102 02:当伺服启动后,若没有异常发生,此信号输出信号。
P2-19:103 03:当电机运行速度低于零速度(参数P1-38)的速度设定时,此信号输出信号。
P2-20: 数字输出接脚DO3功能规划参数功能:109P2-21: 数字输出接脚DO4功能规划参数功能:105P2-22: 数字输出接脚DO5功能规划参数功能:07 07:当伺服发生警示时,此信号输出信号。
篇二:台达PLC控制伺服ASDA说明台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达B2系列伺服简易调试
流程
-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
台达B2系列伺服建议调试流程
一、电缆连接
1,37、39、41、43,分别的定义是:方向+、方向-、脉冲+、脉冲-。
2,如需做共阳处理。
请39、43并一起接5V+,然后37接方向、43接脉冲。
二、参数调整
1,伺服使能。
伺服使能后,电机被锁死,伺服进入待工作状态。
可以将P2-10参数设置为001,即为伺服上电自动使能;也可以将此参数更改为101,即为伺服上电后,需外部输入信号使能,即9号脚接入24GND,伺服使能。
2,参数重置开关
参数恢复出厂值开关,需在伺服使能无效时使用。
参数为P2-08,更改为10,伺服自动参数重置,无需重启。
3,参数设置
快速设置
P2-15设置为0.
P2-16设置为0.
P2-17设置为0.
电子齿轮比:
P1-44与P1-45比值为64:2为5000个脉冲电机转一圈;
P1-44与P1-45比值为32:2为10000个脉冲电机转一圈;(A2系列为128:1为10000个脉冲一圈)
基本设置:
P1-00,脉冲形式选择,位选择为2,即为脉冲+方向,即XXX2。
P1-00,信号逻辑选择,第三位选择0或1,即为方向反向,即X0XX,或X1XX。
此时电机即可正常运转!
2。