l298n驱动电机的工作原理_L298N驱动步进电机程序
L297_L298芯片混合式步进电机驱动器设计原理图及例程

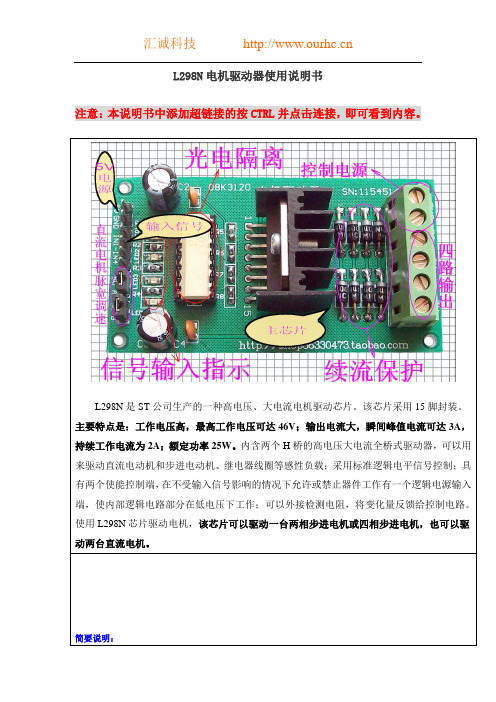
【简要说明】一、尺寸:长71mmX宽43mmX高28mm二、主要芯片:L297、L298N三、工作电压:控制信号直流4.5~5.5V;电机电压直流5V~30V四、最大工作电流:2A五、额定功率25W六、特点:1、具有电源指示。
2、转速可调3、抗干扰能力强4、具有续流保护和过电流保护5、可单独控制一台步进电机6、可控制两相和四相步进电机7、可控制直径在42mm内的任何,两相和四相步进电机适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【标注图片】【步进电机控制接线图】步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
四、此板驱动步进电机测试程序说明:以AT89S52单片机控制单元,C语言编程!【接线图】【测试程序】/********************************************************************汇诚科技实现功能:正转_反转_减速_加速程序使用芯片:AT89S52 或者STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明和作者信息!*********************************************************************/ #include<reg52.h>#define uchar unsigned char#define uint unsigned intuchar Y=1; //初始化速度/********************************************************控制位定义********************************************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位sbit zheng_zhuan=P2^0; // 正转sbit fan_zhuan=P2^1; // 反转sbit jia_su=P2^2; // 加速sbit jian_su=P2^3; // 减速/********************************************************延时函数********************************************************/ void delay(uchar i)//延时函数{uchar j,k;for(j=0;j<i;j++)for(k=0;k<180;k++);}/********************************************************加速函数********************************************************/ void jia(){Y=Y-1;if(Y<=1){Y=1;}//如果速度值小于等于1,值保持不变}/********************************************************减速函数********************************************************/ void jian(){Y=Y+1;if(Y>=100){Y=100;}}/********************************************************主函数********************************************************/main(){shi_neng=1; // 使能控制位fang_shi=1; // 工作方式控制位fang_xiang=1;// 旋转方向控制位mai_chong=1; // 脉冲控制位while(1){if(zheng_zhuan==0){fang_xiang=1;}if(fan_zhuan==0){fang_xiang=0;}if(jia_su==0){delay(10);while(!jia_su);jia();}if(jian_su==0){delay(10);while(!jian_su);jian();}mai_chong=~mai_chong; //输出时钟脉冲delay(Y); //延时(括号内数值越小,电机转动速度越快)}}/********************************************************结束********************************************************/【应用原理图】L297_L298芯片混合式步进电机驱动器元件清单序号名称标注名型号封装备注1 电阻R1、R3 1K 贴片0805封装2 电阻R2 3.9K 贴片0805封装3 电阻R4、R5 0.5欧姆直插2W4 电阻R6 22K 贴片0805封装5 电容C1 25V0.22uf 直插电容6 电阻C2 50V100UF 电解电容7 发个二极管DS1 红色二极管区分正负极8 整流二极管D1~D8 IN40079 芯片U1 L297 20P直插10 芯片U2 L29811 排针P1 6针12 端子6针【图片展示】/********************************************************实现功能:正转程序使用芯片:AT89S52晶振:11.0592MHZ编译环境:Keil********************************************************/#include<reg52.h> //库文件#define uchar unsigned char //字符型宏定义#define uint unsigned int //整型宏定义uchar tt; //定时器计数初值定义uint sec; //速度值定义uchar Y=30; //初始化速度/********************************************************控制位定义********************************************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位sbit zheng_zhuan=P2^0; // 正转sbit fan_zhuan=P2^1; // 反转sbit jia_su=P2^2; // 加速sbit jian_su=P2^3; // 减速/********************************************************************延时函数*********************************************************************/ void delay(uchar t){uchar i,j;for(i=0;i<t;i++){for(j=13;j>0;j--);{ ;}}}/********************************************************************定时中断服务函数*********************************************************************/ void t0(void) interrupt 1 using 0 //定时中断服务函数{tt++; //每过250ust tt 加一if(tt==1) //当tt满足条件时{tt=0; //计满重新再计sec++;if(sec==Y) //括号内数值越小,电机转动速度越快{sec=0; //计满重新再计mai_chong=~mai_chong; //脉冲输出}}}/********************************************************初始化********************************************************/ void init(){TMOD=0x02; //定时器工作在方式2ET0=1;EA=1;TH0=0xFF; //对TH0 TL0 赋值TL0=0xFE;TR0=1; //开始定时sec=0;mai_chong=1; // 脉冲控制位}/********************************************************加速函数********************************************************/ void jia(){Y=Y-2;if(Y<=1){Y=2;}//如果速度值小于等于1,值保持不变}/********************************************************减速函数********************************************************/ void jian(){Y=Y+2;if(Y>=100){Y=100;}}/********************************************************主函数********************************************************/main(){init(); //程序初始化shi_neng=0; // 使能控制位fang_shi=1; // 工作方式控制fang_xiang=1;// 控制方向为正转while(1){if(zheng_zhuan==0){delay(100);shi_neng=1;fang_xiang=0;}if(fan_zhuan==0){delay(100);shi_neng=1;fang_xiang=1;}if(jia_su==0){delay(10);while(!jia_su);jia();}if(jian_su==0){delay(10);while(!jian_su);jian();}}}/********************************************************结束********************************************************/keil参考程序正转_反转_加速_减速_高速#include<reg52.h>#define uchar unsigned char#define uint unsigned intuchar Y=1; //初始化速度/********************************************************控制位定义********************************************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位sbit zheng_zhuan=P2^0; // 正转sbit fan_zhuan=P2^1; // 反转sbit jia_su=P2^2; // 加速sbit jian_su=P2^3; // 减速/********************************************************延时函数********************************************************/void delay(uchar i)//延时函数{uchar j,k;for(j=0;j<i;j++)for(k=0;k<180;k++);}/********************************************************加速函数********************************************************/ void jia(){Y=Y-1;if(Y<=1){Y=1;}//如果速度值小于等于1,值保持不变}/********************************************************减速函数********************************************************/ void jian(){Y=Y+1;if(Y>=100){Y=100;}}/********************************************************主函数********************************************************/main(){shi_neng=1; // 使能控制位fang_shi=1; // 工作方式控制位fang_xiang=1;// 旋转方向控制位mai_chong=1; // 脉冲控制位while(1){if(zheng_zhuan==0){fang_xiang=1;}if(fan_zhuan==0){fang_xiang=0;}if(jia_su==0){delay(10);while(!jia_su);jia();}if(jian_su==0){delay(10);while(!jian_su);jian();}mai_chong=~mai_chong; //输出时钟脉冲delay(Y); //延时(括号内数值越小,电机转动速度越快)}}AVR系列单片机控制参考程序#include <iom16v.h>#include <macros.h>/**********************************************************************函数数据类型说明**********************************************************************/ #define uchar unsigned char#define uint unsigned int/**********************************************************************延时函数**********************************************************************/ void delay(uint MS){uint i,j;for( i=0;i<MS;i++)for(j=0;j<80;j++); //1141是在8MHz晶振下,通过软件仿真反复实验得到的数值}/**********************************************************************主函数**********************************************************************/ void main(){ uint i;i=10;//改变变量i 的大小可以改变速度,i越大速度越慢DDRB=0XFF;//PORTC=0XFF;PORTB|=BIT(0);//00000001 使能控制开PORTB|=BIT(1);//00000010 四拍工作方式PORTB|=BIT(2);//00000100 正方向旋转while(1){PORTB|=BIT(3);//00001000 脉冲输出delay(i);PORTB&=~BIT(3);delay(i);}}/**********************************************************************结束**********************************************************************/。
L298N控制直流电机正反转
L298N控制直流电机正反转一、概述在现代工业自动化和机械设备中,直流电机因其控制简单、响应迅速等特点而被广泛应用。
直流电机的控制并非一件简单的事情,特别是要实现其正反转功能,就需要一种可靠的电机驱动器。
L298N是一款常用的电机驱动器模块,它基于H桥驱动电路,可以有效地控制直流电机的正反转,并且具备过载保护和使能控制功能,使得电机控制更为安全、可靠。
L298N模块内部集成了两个H桥驱动电路,可以同时驱动两个直流电机,且每个电机的驱动电流可达2A,使得它适用于驱动大多数中小型的直流电机。
L298N模块的控制逻辑简单明了,只需通过控制其输入逻辑电平,即可实现电机的正反转、停止等功能。
掌握L298N 模块的使用方法,对于熟悉和掌握直流电机的控制具有重要的意义。
在接下来的内容中,我们将详细介绍L298N模块的工作原理、控制逻辑、驱动电路连接方法以及在实际应用中的使用技巧,以帮助读者更好地理解和应用L298N模块,实现直流电机的正反转控制。
1. 简述直流电机在工业和生活中的重要性直流电机,作为一种重要的电能转换和传动设备,在工业和生活中发挥着至关重要的作用。
它们广泛应用于各种机械设备中,成为驱动各种工业设备和家用电器运行的核心动力源。
在工业领域,直流电机的重要性无可替代。
它们被广泛应用于各种生产线上的机械设备,如机床、泵、风机、压缩机、传送带等。
这些设备需要稳定、可靠的动力源来驱动,而直流电机正好满足这些需求。
它们具有高效、稳定、易于控制等优点,能够实现精确的速度和位置控制,从而提高生产效率和产品质量。
直流电机还在交通运输领域发挥着重要作用。
例如,电动汽车、电动火车、无人机等新型交通工具都采用了直流电机作为动力源。
这些交通工具需要高效、环保的动力系统来驱动,而直流电机正是满足这些需求的理想选择。
在生活中,直流电机也无处不在。
它们被广泛应用于各种家用电器中,如电扇、吸尘器、洗衣机、冰箱、空调等。
这些家电需要稳定、可靠的动力源来运行,而直流电机正是这些家电的核心动力源。
L298N中文资料

L298N中文资料步进电机驱动芯片L298中文资料双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver )L298中文资料L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。
L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路; OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图图10 L298 内部逻辑图L298 ABSOLUTE MAXIMUM RATINGS 绝对最大额定值: Symbol符号Parameter 参数Value数值单位VSPower Supply 电源50VSSLogic Supply Voltage 电源电压7VVI,VenInput and Enable Voltage 输入电压和启用–0.3 to 7VIO峰值输出电流(每通道)非重复性(t= 100ms)3重复(80% on –20% off; ton = 10ms) 2.5直流运行2VsensSensing Voltage 感应电压–1 to 2.3VPtotTotal Power Dissipation (Tcase=75℃)总功率耗散(Tcase=75 ℃)25WTopJunction Operating Temperature 结工作温度–25 to 130℃Tstg,TjStorage and Junction Temperature 储存温度–40 to 150℃L298 PIN FUNCTIONS (refer to the block diagram) 引脚功能(请参阅框图):PowerSONameFunction 功能说明1;152;19Sense A; Sense B 引脚电流监测端,1、15和PowerSO的2、19用法一样,SEN1、SEN2分别为两个H桥的电流反馈脚,不用时可以直接接地2;34;5Out 1; Out 21Y1、1Y2输出端46VS功率电源电压,此引脚与地必须连接100nF电容器 5;77;9Input 1; Input 21A1、1A2输入端,TTL电平兼容6;118;14Enable A; Enable BTTL电平兼容输入 1EN、2EN使能端,低电平禁止输出 81,10,11,20GNDGND地912VSS逻辑电源电压。
L298N中文资料
L298N中文资料篇一:l298n资料步进电机驱动芯片L298中文数据双全桥步进电机专用驱动芯片(dualfull-bridgedriver)l298中文资料L298N是SGS汤姆逊微电子公司生产的双全桥步进电机的双全桥驱动器。
它包含4通道逻辑驱动电路,是一个两相电路和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个h-bridge的高电压、大电流双全桥式驱动器,接收标准TTL逻辑电平信号可驱动46v及2a以下的步进电机,输出电压可直接通过电源调节;该芯片可以直接从单片机的IO口提供模拟定时信号,但在本驱动电路中用l297来提供时序信号,节省了单片机io端口的使用。
l298n之接脚如图9所示,pin1和pin15可与电流侦测用电阻连接来控制负载的电路;outl、out2和out3、out4之间分别接2个步进电机;input1~input4输入控制电位来控制电机的正反转;enable则控制电机停转。
图9l298引脚示意图图10l298内部逻辑图L298绝对最大额定值:符号parameter参数价值单位vspowersupply电源五十vvsslogicsupplyvoltage电源电压七维恩inputandenablevoltage输入电压和启用 c0。
3到7v木卫一峰值输出电流(每通道)A.非重复性(t=100ms)三重复(80%onc20%off;ton=10ms)二点五直流运行二vsens感应电压c1to2.3五、ptot总功耗(tcase=75℃)25Wtop结工作温度c25to130tstg,tj存储和结温c40to150℃l298pinfunctions(refertotheblockdiagram)引脚功能(请参阅框图):powersoname功能描述1;152.十九sensea;senseb引脚电流监测终端1和15的使用与powerso 2和19相同。
SEN1和sen2分别是两个h桥的电流反馈引脚,不使用时可直接接地2;34.五out1;out21y1,1Y2输出4六vs电源电压、该引脚和接地必须与100nF电容器连接5;77.九input1;input21A1和1A2输入,TTL电平兼容6;118.十四enablea;enablebTTL电平与输入1EN和2EN使能端子兼容,低电平禁止输出 81,10,11,20gnd接地9十二vss逻辑电源电压。
L298N大功率电机驱动模块使用手册

void main(void)
{
DelayMs(100);
while(1)
{
motor_ffw_setp(50); //电机正转 50 步
DelayMs(300);
//换向延时
motor_ffw_setp(50); //电机正转 50 步
DelayMs(300);
//换向延时
motor_ffw_setp(50); //电机正转 50 步
uchar MOTO_SETP_TIME = 2;//步进电机每走一步要用的时间(单位毫秒)
/*=========================================================================
主程序
=========================================================================*/
sbit PWM2_OUT = P3^5; //M2:PWM 的输出脚
sbit BEEP
sbit MOTOR1_DR1 = P3^0; //M1:电机转向控制 1
sbit MOTOR1_DR2 = P3^1; //M1:电机转向控制 2
教大家使用L298N电机驱动模块,电机控制正反转、调速很轻松!

教大家使用L298N电机驱动模块,电机控制正反转、调速很轻松!普及数电模电知识,科教兴国。
大家好,今天和大家来学习L298N电机驱动模块。
L298N是双H 桥电机驱动芯片,可以驱动两个直流电机或者一个步进电机,能实现电机的正反转以及调速。
先来看看L298N芯片实物:上图是15脚Multiwatt封装的L298N。
L298N兼容标准的TTL逻辑,是一款高电压、高电流双全桥驱动器,能够驱动感性负载,例如继电器、电磁阀、直流电机、步进电机等。
两个独立的使能信号用于使能或禁能设备,每一个桥的下管射极相连,射极引脚可以连接相应的采样电阻,用以过流保护,芯片的逻辑供电与负载供电分离,以使芯片可以工作在更低的逻辑电压下。
这个芯片那么多引脚,对于各引脚的功能定义,我们可以通过数据手册来了解:从下往上数,按照序号,1脚和15脚是:电机电流(或叫桥驱动电流)检测引脚;2、3脚是A桥输出引脚,可接一个直流电机;4脚是负载驱动供电引脚,这个引脚和地之间必须要接一个100nF的无感电容;5脚和7脚是A桥信号输入,兼容TTL电平;6脚和11脚是使能输入,兼容TTL,低电平禁能,高电平使能;8脚是地,GND;9脚是逻辑供电,该引脚到地必须连接一个100nF的电容;10脚和12脚是B 桥信号输入,同样兼容TTL逻辑电平;13脚和14脚是B桥输出,可接一个直流电机。
在这里需要提一下,是关于1脚和15脚:当需要对电机电流进行检测时,分别在sense A、B两个引脚上串接个小电阻,当A、B两个桥的电流(电机电流)流过两个电阻时转换成电压,这个电压被送到控制L298工作的上位机(或控制电路),上位机就根椐这个电压的高低判断L298是否工作正常。
如果这个电压超过设计上限时,上位机就判L298有故障,可采取如下保护措施:1、停止步进脉冲输出,关断电机电流。
2、给EN脚一个低电平,关闭L298。
如sense不用,就直接将sense A、B两脚接地。
L298N电机可编程控制器设计原理图PCB图及例程

L298N直流电机步进电机可编程驱动控制器简要说明:一、尺寸:长88mmX宽67mmX高35mm二、主要芯片:L298N、光电耦合器三、工作电压:输入电压(5V~30V)输入电压的大小由被控制电机的额定电压决定。
四、可驱动直流(5~30V之间电压的直流电机或者步进电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离10、P3口全部引出11、四位LED灯指示12、四位按键输入(可以对AT89S52单片机编程实现任何控制)产品最大特点:可以对AT89S52单片机编程实现任意控制被控的直流电机或者步进电机。
适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
注意啦:本产品提供例程(附带原理图以及说明!)【标注图片】【步进电机接线图】【直流电机接线图】【应用原理图】实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 三、控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
四、此板驱动步进电机测试程序说明:以AT89S52单片机控制单元,C语言编程!【测试程序】/********************************************************************汇诚科技实现功能:正转_反转_减速_加速程序使用芯片:AT89S52 或者 STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技*********************************************************************/#include<reg52.h>/*------宏定义------*/#define uchar unsigned char#define uint unsigned int/*****P1.0=A ;P1.1=B ;P1.2=A' ; P1.3=B'****//*******************************正转数组**************************************************/ code unsigned char runz[8]={0x05,0x01,0x09,0x08,0x0a,0x02,0x06,0x04}; //两相四线八拍工作方式/*******************************反转数组**************************************************/ code unsigned char runf[8]={0x04,0x06,0x02,0x0a,0x08,0x09,0x01,0x05}; //两相四线八拍工作方式uchar keycan=0; //键值int y=15;//定义转动速度,数值越大电机转速越慢反之则快sbit P2_0=P2^0;//正转按键sbit P2_1=P2^1;//反转按键sbit P2_2=P2^2;//电机减速sbit P2_3=P2^3;//电机加速/********************************************************************延时函数*********************************************************************/void delay(i)//延时函数{uchar j,k;for(j=0;j<i;j++)for(k=0;k<250;k++);}/********************************************************************正转运行函数*********************************************************************/void zrun()// 正转运行{uchar z;for(z=0;z<8;z++){P1=runz[z];delay(y);}}/********************************************************************反转运行函数*********************************************************************/void frun()// 反转运行{uchar z;for(z=0;z<8;z++){P1=runf[z];delay(y);}}/********************************************************************主函数*********************************************************************/ main(){while(1){if(P2_0==0) //如果电机正转按键按下{keycan=1; //键值等于1}if(P2_1==0) //如果电机反转按键按下{keycan=2; //键值等于2}switch (keycan){case 1: zrun(); //键值等于1 正转break;case 2: frun(); //键值等于2 反转break;}if(P2_2==0) // 电机减速{y+=2;}if(P2_3==0) // 电机加速{y-=2;}}}/********************************************************************结束*********************************************************************/实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机。
L298N驱动步进电机程序(带PWM)
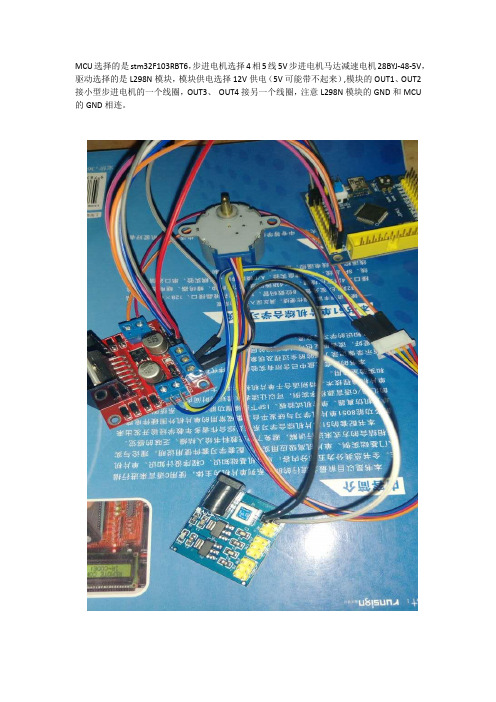
MCU选择的是stm32F103RBT6,步进电机选择4相5线5V步进电机马达减速电机28BYJ-48-5V,驱动选择的是L298N模块,模块供电选择12V供电(5V可能带不起来),模块的OUT1、OUT2接小型步进电机的一个线圈,OUT3、OUT4接另一个线圈,注意L298N模块的GND和MCU 的GND相连。
*******************************************************************************步进电机头文件Stepmotor.h#ifndef __MOTOR_H#define __MOTOR_Hvoid Motor_Init(void);void Motor_Go(void);#endif源文件Stepmotor.c#include "stepmotor.h"#include "sys.h"void Motor_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8;//PB3接IN1 PB5接IN2 PB7接IN3 PB8接IN4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO口速度为50MHzGPIO_Init(GPIOB, &GPIO_InitStructure);//GPIO_ResetBits(GPIOB,GPIO_Pin_3|GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8);******************************************************************************* PWM调制头文件mypwm.h#ifndef __TIMER_H#define __TIMER_H#include "sys.h"void MYTIMER3_Init(u16 arr,u16 psc);void TIM3_PWM_Init(u16 arr,u16 psc);#endif源文件mypwm.c#include " mypwm.h#include "stm32f10x.h"void TIM3_PWM_Init(u16 arr,u16 psc){TIM_OCInitTypeDef TIM_OCInitTypestucture;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitstucture;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能定时器时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO, ENABLE);//使能PC端口,复用时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;//PC6接ENA PC7接ENB GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO口速度为50MHz GPIO_Init(GPIOC, &GPIO_InitStructure);//GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);//TIM_TimeBaseInitstucture.TIM_Period=arr;//自动装载值TIM_TimeBaseInitstucture.TIM_Prescaler=psc;//预分频值TIM_TimeBaseInitstucture.TIM_CounterMode=TIM_CounterMode_Up;//计数模式向上TIM_TimeBaseInitstucture.TIM_ClockDivision=0 ;//TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitstucture);TIM_OCInitTypestucture.TIM_OCMode=TIM_OCMode_PWM1 ;//模式1TIM_OCInitTypestucture.TIM_OCPolarity=TIM_OCPolarity_High;//高电平TIM_OCInitTypestucture.TIM_Pulse=599;//改变数值调节占空比TIM_OCInitTypestucture.TIM_OutputState=TIM_OutputState_Enable;//使能TIM_OC1Init(TIM3,&TIM_OCInitTypestucture);TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能预装载TIM_OCInitTypestucture.TIM_OCMode=TIM_OCMode_PWM1 ;//模式1TIM_OCInitTypestucture.TIM_OCPolarity=TIM_OCPolarity_High;//高电平TIM_OCInitTypestucture.TIM_Pulse=599;TIM_OCInitTypestucture.TIM_OutputState=TIM_OutputState_Enable;//使能TIM_OC2Init(TIM3,&TIM_OCInitTypestucture);TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能预装载TIM_Cmd(TIM3,ENABLE);//使能定时器}*******************************************************************************主函数#include "stepmotor.h"#include "stm32f10x.h"#include "delay.h"#include "timer.h"int main(){delay_init();Motor_Init();TIM3_PWM_Init(999,71);// 72M/(71+1)(999+1)=1K hzwhile(1) //正转{GPIO_SetBits(GPIOB,GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8);//0111GPIO_ResetBits(GPIOB,GPIO_Pin_3);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_7| GPIO_Pin_8);//1011GPIO_ResetBits(GPIOB,GPIO_Pin_5);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_8);//1101GPIO_ResetBits(GPIOB,GPIO_Pin_7);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_7);//1110GPIO_ResetBits(GPIOB,GPIO_Pin_8);delay_ms(4);}}。
L298N电机驱动电路原理图
PID102 COD1 D1
VSS
PID202 D2 COD2
PID302 COD3 D3
PID402 COD4 D4 PID401 IN4007
COM1 M1
PIM101 PIM102
PID101 IN4007
PID201 IN4007 PID301 IN4007
1 2
Motor1
1
15 PIU1015
PID502 COD5 D5 PID501 IN4007
PID602 D6 COD6
PID702 COD7 D7
PID802 COD8 D8 PID801 IN4007
COM2 M2
PIM201 1
PIM202
2
PID601 IN4007 PID701 IN4007
Motor2
GND
VCC 1
COU2 U2
PIU201 Vin
LM7805
GND
+5V 2
Vout
COR1 R1
PIR101
COD9 D9
PIR102 PID901 PID902
PIU202
B
PIC101+ COC1 C1
GND
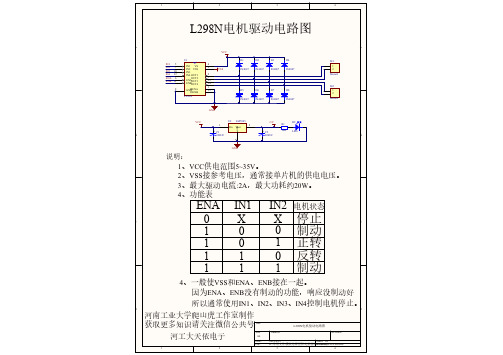
说明: 1、VCC供电范围5~35V。 2、VSS接参考电压,通常接单片机的供电电压。 3、最大驱动电流:2A,最大功耗约20W。 4、功能表
l298n电机驱动电路图河南工业大学爬山虎工作室制作获取更多知识请关注微信公共号河工大天依电子
1
2
3
4
L298N电机驱动电路图
A VCC A
COU1 U1 NLIN1 IN1 NLIN2 IN2 NLIN3 IN3 NLIN4 IN4
L298N电机驱动器_共地说明书
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下: 两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)通电控制脉冲必须严格按照这一顺序分别控制A,B 相的通断。
)2、两相四线步进电机的四拍工作方式,其各相通电顺序为: (A -AB -B -BA ’-A ’-A ’B ’-B ’-B ’依次循环。
(出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用八拍工作方式)(2)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
如:正转通电顺序是:(A-B-A’-B’依次循环。
)则反转的通电顺序是:(B‘-A’-B-A依次循环。
)参考下例:(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
参考下例:(4)四相电机的控制程序以下为参考程序:实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
l298n
L298NL298N 是一种双 H-桥电机驱动芯片,可用于控制直流电机或步进电机。
它广泛应用于机器人、小车、无人机和其他需要精确控制电机的项目中。
本文将详细介绍L298N 的工作原理、连接方式以及一些常见问题的解决方法。
工作原理L298N 由两个 H-桥组成,每个 H-桥由四个开关管组成。
这些开关管由输入信号控制,以控制电机的转向和速度。
当两个开关管打开时,电机就会沿着一个方向旋转;当两个开关管关闭时,电机会沿着另一个方向旋转。
通过改变开关管的开闭状态和输入信号的时序,可以实现电机的精确控制。
连接方式L298N 的引脚功能如下所示:•EN1:使能电机1,用于控制电机1的转速。
•IN1、IN2:控制电机1的方向。
•EN2:使能电机2,用于控制电机2的转速。
•IN3、IN4:控制电机2的方向。
•VM:电机供电电源(4.8-35V)。
•GND:地。
•OUT1、OUT2:电机1输出。
•OUT3、OUT4:电机2输出。
以下是连接 L298N 的步骤:1.将VM连接到电机的正极,将地线连接到电机的负极。
2.将电机1的正极连接到OUT1,负极连接到OUT2。
3.将电机2的正极连接到OUT3,负极连接到OUT4。
4.使用导线将EN1连接到微控制器的输出引脚,以控制电机1的转速。
5.使用导线将IN1和IN2连接到微控制器的输出引脚,以控制电机1的转向。
6.使用导线将EN2连接到微控制器的输出引脚,以控制电机2的转速。
7.使用导线将IN3和IN4连接到微控制器的输出引脚,以控制电机2的转向。
常见问题与解决方法1. 电机运转不稳定这可能是由于电源供电不稳定或驱动芯片过热导致的。
解决方法包括:•使用稳定的电源供电。
确保电源电压在规定范围内。
•添加散热器以降低驱动芯片的温度。
•降低电机的负载,避免过度功率消耗。
2. 电机转向错误这可能是由于输入信号控制错误或引脚连接错误导致的。
解决方法包括:•检查输入信号的时序和引脚连接是否正确。
l298n工作原理
l298n工作原理
L298N是一种双H桥驱动芯片,常用于驱动直流电机或步进
电机。
它具有以下工作原理:
1. 在正向旋转时,使IN1和IN2两个输入端分别提供不同的
控制信号,如IN1为高电平,IN2为低电平。
这将使输出的OUT1和OUT2两个端口分别提供正向电流给电机的两个线圈,从而使电机顺时针旋转。
2. 在反向旋转时,需要改变控制信号。
这时,使IN1输入为
低电平,IN2输入为高电平。
这将使输出的OUT1和OUT2两
个端口分别提供反向电流给电机的两个线圈,从而使电机逆时针旋转。
3. 如果需要制动电机停止旋转,可以将IN1和IN2都设置为
低电平。
此时,电机的两个线圈将被短路,产生制动效果,电机停止旋转。
4. L298N还提供了使得电机速度可以进行调节的PWM控制功能。
使用PWM信号可以控制电机的平均电压大小,从而控制
电机的转速。
通过调节PWM信号的占空比,可以使电机以不
同的速度旋转。
总的来说,L298N的工作原理是根据输入的控制信号,控制
输出的电流方向和大小,从而驱动电机按照预定的方式旋转。
l298n电机驱动原理

l298n电机驱动原理
L298N电机驱动原理:L298N是一款常用的双路直流电机驱动芯片,能够控制2个直流电机或一个步进电机。
其工作原理是通过控制输入信号来控制电机的旋转方向和速度。
L298N内部包含了两个H桥电路,每个H桥电路都由4个开关管组成,可以实现电机的正反转和PWM调速。
L298N的控制信号需要通过外部控制器(如单片机)来控制,控制信号经过L298N的输入端口,经过内部解码和放大后输出到H桥电路的控制端口,从而控制电机的方向和速度。
具体控制方式如下:
1. 控制电机方向:通过控制IN1和IN2两个输入端口的信号,可以控制电机的正反转,其中IN1和IN2分别控制电机的两个端口,当IN1为高电平、IN2为低电平时,电机正转;当IN1为低电平、IN2为高电平时,电机反转。
2. 控制电机速度:使用PWM信号控制电机速度,PWM信号的占空比越大,电机转速越快。
总之,L298N电机驱动芯片具有方便、灵活、高效等优点,在机器人、小车、智能家居等领域得到广泛应用。
- 1 -。
l298n直流电机 用法
l298n直流电机用法l298n直流电机是一种常用的电机驱动模块,它能够通过控制直流电机的转速和方向来实现各种精确的运动控制。
在本文中,我将为您介绍l298n直流电机的基本用法,并探讨其在各种应用中的广泛应用。
让我们来了解一下l298n直流电机模块的基本结构和原理。
l298n直流电机模块通常由一个l298n芯片和外部部件组成,如电源、电机和控制信号。
l298n芯片是一种双H桥驱动芯片,它可以独立地控制两个直流电机,并通过控制输入信号来实现正转、反转和停止等运动。
l298n芯片还具有保护电路,可以保护电机和电源免受电流和过热等问题的影响。
对于l298n直流电机模块的用法,首先要正确连接电源和电机。
正常情况下,l298n芯片的电源应与电机的电源相匹配,以确保电源稳定和电流充足。
接下来,我们需要将直流电机与l298n芯片的输出引脚相连,其中IN1和IN2控制第一个电机,IN3和IN4控制第二个电机。
并且,我们还需将控制信号引脚连接到微控制器或其他控制设备上,以便可以发送相应的控制信号。
一旦连接正确,我们就可以开始使用l298n直流电机模块进行各种运动控制了。
我们可以使用PWM技术来控制电机的转速。
通过调整PWM占空比,我们可以改变电机的平均电压,并从而调整其转速。
通过控制IN1和IN2的电平可实现电机的正转、反转和停止等操作。
通过控制IN1和IN2的电平,我们可以实现电机的正转、反转和停止等操作。
通过编程调整控制信号,我们还可以实现更复杂的运动控制,如加减速和位置控制等。
l298n直流电机模块是一种功能强大的电机驱动模块,可用于各种应用中的精确运动控制。
无论是机器人控制、智能小车还是电动机械臂,l298n直流电机模块都能够为我们提供便利和灵活性。
通过合理的连接和编程,我们可以实现各种想象力的运动控制,为我们的项目增添无限可能。
l298n直流电机模块是一种强大且易于使用的电机驱动模块,它为我们提供了灵活的运动控制和精确的转速调节。
(完整word版)大总结L298N的详细资料驱动直流电机和步进电机

大总结L298N的详细资料驱动直流电机和步进电机电机驱动电路;电机转速控制电路(PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图--------------------------------------------------------L298N电机驱动模块图•1.1实物图•1.2原理图••1.3各种电机实物接线图••1.4各种电机原理图•1.5模块接口说明••L298N电机驱动模块图1.1实物图正面背面1.2原理图1.3各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+:为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为IN1和IN2、IN3和IN4的使能端。
IN1~IN4:输入端,输入端电平和输出端电平是对应的。
我正在用L298N驱动我的小车的两个直流减速电机,其实它很好用,1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3,输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
l98n的详细资料

大总结L298N的详细资料驱动直流电机和步进电机电机驱动电路;电机转速控制电路(PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图--------------------------------------------------------L298N电机驱动模块图••1.1 实物图••1.2 原理图•••1.3 各种电机实物接线图•••1.4 各种电机原理图•••1.5 模块接口说明•••L298N电机驱动模块图1.1 实物图正面背面1.2 原理图1.3 各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5 模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
我正在用L298N驱动我的小车的两个直流减速电机,其实它很好用,1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3, 输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
l298n工作原理
l298n工作原理L298N工作原理。
L298N是一种常用的双H桥直流电机驱动芯片,它可以控制直流电机的转向和转速。
在很多电子设备中都可以见到它的身影,比如小车、机器人、无人机等。
那么,L298N是如何工作的呢?接下来,我们就来详细介绍一下L298N的工作原理。
L298N芯片内部包含了两个H桥驱动电路,每个H桥可以控制一个直流电机。
H桥电路是一种可以控制电机正反转的电路,它由四个开关管组成,通过控制这些开关管的通断状态,可以实现电机的正反转。
L298N芯片通过外部连接的控制信号来控制内部的开关管,从而控制电机的运行状态。
在L298N芯片的引脚中,有一些是用来连接控制信号的,比如使能端、方向控制端等。
通过对这些控制信号的控制,可以实现对电机的转向和转速的控制。
另外,L298N芯片还有一些引脚是用来连接电源和电机的,这些引脚提供了电源和电机的连接接口,通过这些引脚可以为电机提供电源,并将电机与L298N芯片连接起来。
当控制信号输入到L298N芯片时,芯片内部的逻辑电路会对这些信号进行处理,并控制开关管的通断状态,从而控制电机的运行状态。
比如,当使能端为高电平时,电机开始工作;当方向控制端为高电平时,电机正转;当方向控制端为低电平时,电机反转。
通过对这些控制信号的控制,可以实现对电机的精确控制。
除了控制信号外,L298N芯片还需要外部连接电源和电机。
电源的电压需要符合L298N的工作电压要求,而电机的电压需要符合电机的额定工作电压。
通过外部连接电源和电机,可以为电机提供所需的电源,从而使电机正常工作。
总的来说,L298N通过接收外部的控制信号,控制内部的开关管,从而控制电机的转向和转速。
通过外部连接电源和电机,为电机提供所需的电源和信号输入,使电机可以按照预期的方式工作。
这就是L298N的工作原理。
通过对L298N的工作原理的了解,我们可以更好地使用它来控制电机,实现我们设想中的功能。
希望本文能够对大家有所帮助,谢谢阅读!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
l298n驱动电机的工作原理_L298N驱动步进电机程序
步进电机简介步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。
步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
由于步进电动机能直接接受数字量的控制,所以特别适宜采用微机进行控制。
(一)步进电机的种类
目前常用的有三种步进电动机:
(1)反应式步进电动机(VR)反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差。
(2)永磁式步进电动机(PM)永磁式步进电动机出力大,动态性能好;但步距角大。
(3)混合式步进电动机(HB)混合式步进电动机综合了反应式、永磁式步进电动机两
者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机。
它有时也称作永磁感应子式步进电动机。
(二)步进电动机的工作原理
图X1三相反应式步进电动机结构示意图
1定子2转子3定子绕组
图x1是最常见的三相反应式步进电动机的剖面示意图。
电机的定子上有六个均布的磁极,其夹角是60。
各磁极上套有线圈,按图1连成A、B、C三相绕组。
转子上均布40个小齿。
所以每个齿的齿距为E=360/40=9,而定子每个磁极的极弧上也有5个小齿,且定子和转子的齿距和齿宽均相同。
由于定子和转子的小齿数目分别是30和40,其比值是一分数,这就产生了所谓的齿错位的情况。
若以A相磁极小齿和转子的小齿对齐,如图,那么B相和C相磁极的齿就会分别和转子齿相错三分之一的齿距,即3。
因此,B、C极下的磁阻比A磁极下的磁阻大。
若给B相通电,B相绕组产生定子磁场,其磁力线穿越B相。